相平面法
相平面02

2917.2 相平面法相平面法是一种在时域中求解二阶微分方程的图解法。
它不仅能分析系统的稳定性和自振荡,而且能给出系统运动轨迹的清晰图像。
相平面法一般适用于二阶非线性系统的分析。
7.2.1 相平面的基本概念1. 相平面和相轨迹设一个二阶系统可以用下面的常微分方程0),(=+x x f x(7-1) 来描述。
其中),(x x f 是x 和x 的线性或非线性函数。
在一组非全零初始条件下()0(x和)0(x 不全为零),系统的运动可以用解析解)(t x 和)(t x描述。
如果取x 和x 构成坐标平面,则系统的每一个状态均对应于该平面上的一点,这个平面称相平面。
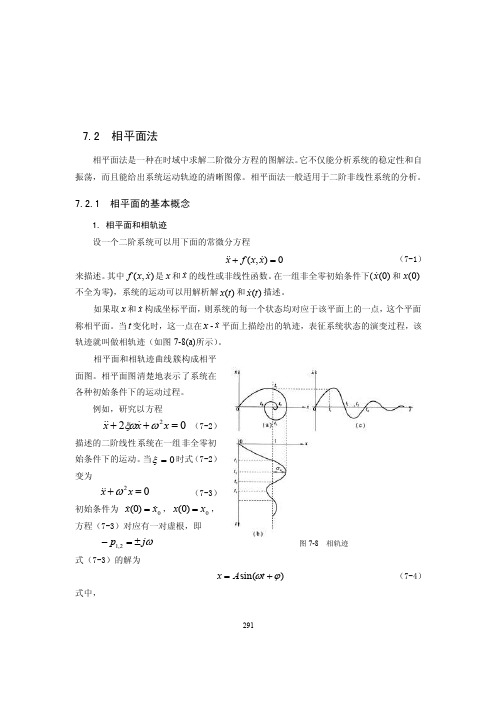
当t 变化时,这一点在x -x平面上描绘出的轨迹,表征系统状态的演变过程,该轨迹就叫做相轨迹(如图7-8(a)所示)。
相平面和相轨迹曲线簇构成相平面图。
相平面图清楚地表示了系统在各种初始条件下的运动过程。
例如,研究以方程022=++x x x ωξω (7-2)描述的二阶线性系统在一组非全零初始条件下的运动。
当0=ξ时式(7-2)变为02=+x x ω (7-3)初始条件为 0)0(x x=,0)0(x x =,方程(7-3)对应有一对虚根,即ωj p ±=-2,1式(7-3)的解为)sin(ϕω+=t A x (7-4)式中,图7-8 相轨迹29222020ωxx A +=,00arctanxx ωϕ=设x 为描述二阶线性系统的一个变量,取x为描述系统的另一状态变量,即 )cos(ϕωω+==t A dtdx x(7-5)从式(7-4)、式(7-5)中消去变量t ,可得出系统运动过程中两个状态变量的关系为222)(A xx =+ω这是一个椭圆方程。
椭圆的参数A 取决于初始条件0x 和0x。
选取不同的一组初始条件,可得到不同的A ,对应相平面上的相轨迹是不同的椭圆,这样便得到一个相轨迹簇。
0=ξ时的相平面图如图7-9所示,表明系统的响应是等幅周期运动。
相平面法
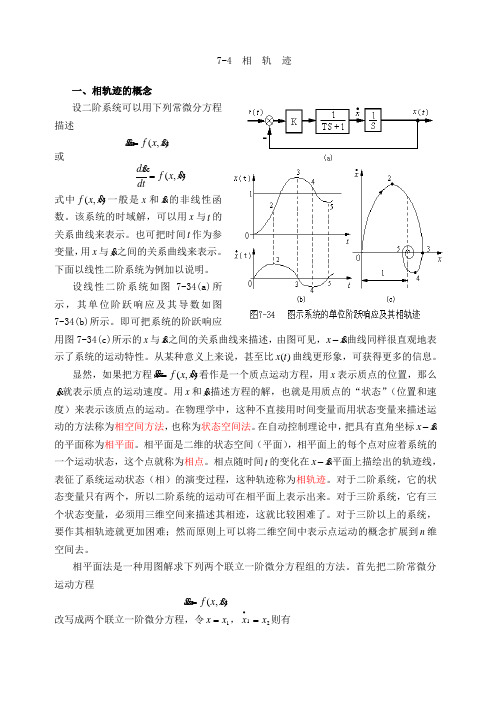
7-4 相 轨 迹一、相轨迹的概念设二阶系统可以用下列常微分方程描述),(x x f x= 或),(xx f dtxd = 式中),(xx f 一般是x 和x 的非线性函数。
该系统的时域解,可以用x 与t 的关系曲线来表示。
也可把时间t 作为参变量,用x 与x之间的关系曲线来表示。
下面以线性二阶系统为例加以说明。
设线性二阶系统如图7-34(a)所示,其单位阶跃响应及其导数如图7-34(b)所示。
即可把系统的阶跃响应用图7-34(c)所示的x 与x 之间的关系曲线来描述,由图可见,xx -曲线同样很直观地表示了系统的运动特性。
从某种意义上来说,甚至比)(t x 曲线更形象,可获得更多的信息。
显然,如果把方程),(x x f x=看作是一个质点运动方程,用x 表示质点的位置,那么x 就表示质点的运动速度。
用x 和x 描述方程的解,也就是用质点的“状态”(位置和速度)来表示该质点的运动。
在物理学中,这种不直接用时间变量而用状态变量来描述运动的方法称为相空间方法,也称为状态空间法。
在自动控制理论中,把具有直角坐标xx -的平面称为相平面。
相平面是二维的状态空间(平面),相平面上的每个点对应着系统的一个运动状态,这个点就称为相点。
相点随时间t 的变化在xx -平面上描绘出的轨迹线,表征了系统运动状态(相)的演变过程,这种轨迹称为相轨迹。
对于二阶系统,它的状态变量只有两个,所以二阶系统的运动可在相平面上表示出来。
对于三阶系统,它有三个状态变量,必须用三维空间来描述其相迹,这就比较困难了。
对于三阶以上的系统,要作其相轨迹就更加困难;然而原则上可以将二维空间中表示点运动的概念扩展到n 维空间去。
相平面法是一种用图解求下列两个联立一阶微分方程组的方法。
首先把二阶常微分运动方程),(x x f x= 改写成两个联立一阶微分方程,令1x x =,21x x =∙则有12212(,)dx x dt dx f x x dt ⎧=⎪⎪⎨⎪=⎪⎩ 或 (,)dxx dtdx f x x dt⎧=⎪⎪⎨⎪=⎪⎩ (7-20)用(7-20)式的第一个方程除第二个方程,可得xx x f dx xd ),(1= (7-21)解(7-21)式就可得相轨迹方程,作出相迹来。
现代控制理论补充内容(2)——相平面法
增量式简化为 : x =
∂f ( x, x) ∂x
x = x0 x + x = x0
∂f ( x, x) ∂x
x = x0 x = x0
x
20
本例, x + 0.5 x + 2 x + x 2 = 0
f ( x, x) = −(0.5 x + 2 x + x 2 )
⎧x = 0 令: ⎨ ⎩ f ( x, x ) = 0
鞍点ζ=0
2 x − ω0 x = 0
或 b=0, S=0,s=-a
17
3.5
相平面图中的奇点和奇线
x dx f ( x, x ) 0 = = 的点。 (1) 奇点: 亦即满足: = x dx x 0
根据奇点附近的相轨迹变化的不同,奇点可分为: 稳定焦点、不稳定焦点、稳定节点、不稳定节点、中心点和鞍点。
12
具体做法: 从初始点开始,依次求圆心位置:
δ1 =
f ( x1 , x1 , t1 ) + ω 2 x1
ω2
画出一系列圆弧,连接成线,即为系统的相轨迹图。
13
3.4
线性系统的相轨迹
1 线性一阶系统的相轨迹
一阶系统的描述方程:
Tc + c = 0
相轨迹方程:
1 c=− c T
——过原点的直线方程
x1 , x1 , t 都很小,可认为 δ ( x, x, t ) = δ1为常量, f ( x1 , x1 , t1 ) + ω 2 x1 其中, δ1 = 2
于是,系统方程可写为:x + ω
ω
2
x = ω 2δ1
x + ω 2 ( x − δ1 ) = 0
相平面法
0
x2
0
x1
x1
(a)稳定焦点
(b)不稳定焦点
17
图8-31 共轭复根对应的相轨迹
1, 2
a d (a d )2 4(ad bc ) 2
5)纯虚根
(a d ) 0, ad bc 0
奇点称为中心点。
x2
0
x1
图8-32
纯虚根对应的相轨迹
18
2、极限环
相平面图上的一根孤立的封闭相轨迹称为极限环。它对应系 统的自激振荡状态。极限环把相平面划分为内部平面和外部 平面两部分,相轨迹不能从环内穿越环进入环外,反之也不 能。
将(4)式代入(2)式整理得
( 4)
1
23
r r (1 r 2 ) 1
有r 0和1 r 2 0两种情况
(1) r 0
x1 0, x2 0 系统的平衡点(奇点)
b P ( x1 , x 2 ) 1 x 2 ( 0,0 )
为一常数。
根据上式可在相平面上绘制一条线,相轨迹通 过这条线上的各点时,其切线的斜率都相同, 称之为等倾线。如果取不同的值 1 , 2 ,则可 在相平面上绘制一系列的等倾线。
8
x2
1
( x10 , x20 )
2
x1
3
4
图8-27 用等倾线法绘制相轨迹
相平面中所有等倾线上的短线,组成了相轨迹的切线场。
P ( x1 , x2 ) P ( x1 , x2 ) P ( x1 , x2 ) x1 x2 x1 x 2 ( 0,0 ) ( 0,0 )
Q( x1 , x2 ) Q( x1 , x2 ) Q( x1 , x2 ) x1 x2 x1 x 2 ( 0,0 ) ( 0,0 )
相平面法ppt课件
有可能出现在x轴上。
11
忽略高阶无穷小, 一般情况下令 x10 x20 0
则有
P( x1,
x2 )
P( x1, x1
x2 )
(0,0)
x1
P( x1, x2
x2 )
(0,0)
x2
Q( x1,
x2 )
Q( x1, x1
x2 )
(0,0)
x1
Q( x1, x2
x2 )
(0,0)
x2
令 a P( x1, x2 )
平面上绘制一系列的等倾线。
8
x2
1
( x10 , x20 )
2
3 x1
4
图8-27 用等倾线法绘制相轨迹
1,2 ,表3示,相轨迹通过这些等倾线时切线的斜率。
相平面中所有等倾线上的短线,组成了相轨迹的切线场。 从相轨迹起始点 ( x10, x20 ) 出发,平滑的将相邻等倾线上 的短线连起来,即得系统相轨迹。
§8.4 相平面法
相平面法是Poincare在1885年首先提出来的, 它是一种求解一、二阶常微分方程的图解 法。这种方法的实质是将系统的运动过程 形象地转化为相平面上一个点的移动,通 过研究这个点移动的轨迹,就能获得系统 运动规律的全部信息。由于它能比较直观、 准确、全面地表征系统的运动状态,因而 获得广泛应用。
1,2
2
5)纯虚根
(a d ) 0, ad bc 0
奇点称为中心点。 x2
0
x1
图8-32 纯虚根对应的相轨迹
18
2、极限环
相平面图上的一根孤立的封闭相轨迹称为极限环。它对应系统 的自激振荡状态。极限环把相平面划分为内部平面和外部平面 两部分,相轨迹不能从环内穿越环进入环外,反之也不能。
相平面自动控制理论

x 0
-2
奇点位
置:
x x
0 0
x 2
x
0
x
0x
原式 x 0.5x 2x x2 0
在0,0 附近,x 和 x 很小,系统可近似为
x 0.5x 2x 0
其中:2nn2
0.5 2
x
解得: 0 1 稳定焦点 -2 0 x
原式 x 0.5x 2x x2 0
在- 2,0附近,令:x x 2
一、用相平面法分析非线性系统
一般步骤:
1首先将非线性特性分段线性化,并写出相应的
数学表达式。
2在相平面上选择合适的坐标(一般取c c, 但当
系统有阶跃或斜坡输入时,取e e更方便),并将
相平面根据非线性特性划分成若干个线性区域。
3根据描述系统的微分方程绘制各区域的相轨迹。
4把相邻区域中的相轨迹在区域的边界适当连接起
r
e
b
x k c 1 c
-
b
Ts
s
并解解 :1得无局部负反馈时线性部分的微分方程为
当在rtt12120ee时22R,时Tbr,TbereTAc0A。k考x
x2
对方程 x f x, x 的研究
可以转化为对方程 dx2 f x1, x2 的研究
dx1
x2
方程的解既可用x与t的关系表示, 也可用x1与x2的关系表示。
实际上,如把 x f x, x 看作一个质
点的运动方程,用x1t 表示质点的位置,
x2 t 表示质点的运动速度。
用x1与x
描
2
述
当系统的初始状态处于
不稳定的极限环的内部
时,系统能稳定工作。
0
x
而当初始条件处于不稳 定的极限环的外部时,
《自动控制原理》 相平面法
(8-24) (8-25) (8-26) (8-27)
c(t) = − b c(t) = kc(t)
+a
(8-28)
其中k为等倾线的斜率。当 a2 − 4b 0时,且 b 0 时,可得满
足k=a的两条特殊的等倾线,其斜率为: ???
k1,2 = 1,2 = s1,2 = − a
a2 2
− 4b
(2)线性二阶系统的相轨迹
c + ac + bc = 0
当b>0时,上述(运动)微分方程又可以表示为
c + 2wnc + wn2c = 0
线性二阶系统的特征根
s1,2 = − a
a2 − 4b 2
相轨迹微分方程为 (相轨迹切线斜率ZX)
dc dc
=
−
ac − c
bc
令
−
ac − bc c
=
,可得等倾线方程为:
初始条件下的运动对应多条相轨迹,形成相轨迹簇,而由一簇相轨
迹所组成的图形称为相平面图。
若已知x和 x 的时间响应曲线如图8-10(b),(c)所示,则可根据 任一时间点的x(t)和 x(t)的值,得到相轨迹上对应的点,并由此获
得一条相轨迹,如图8—10(a)所示。
相轨迹在某些特定情况下,也可以通过积分法,直接由微分方
U+jV 表示根为复数
2
2.00
2
7.46
s2 // jV -2.41 -2.00 0.00 -2.24 -7.46 -3.00 -2.00 -2.24 2.00 0.54
1)b<0。系统特征根
− a + a2 + 4b
s1 =
2
7-2相平面法

当c > 0时,上述微分方程又可以表示为
2 2 n x n x 0 x
线性二阶系统的特征根
b b 4c s1 2
2
b b 2 4c s2 2
相轨迹方程为
dx bx cx dx x
假设由初始条件确定的点为图中的A点。则过A点作斜率为[ (1) + (1.2) ] / 2 = 1.1的直线,与a = 1.2的等倾线交于B点。再过B 点作斜率为的[ (1.2 ) + (1.4) ] / 2 = 1.3 直线,与a = 1.4的等 倾线交于C点。如此依次作出各等倾线间的相轨迹线段,最后即 得系统近似的相轨迹。
x t4
(x, x0)
t3
0 t2 0
t1
x
x
t1
t2 t3 t4
4
当t变化时,系统状态在相 平面上移动的轨迹称为相轨迹。
t
而与不同初始状态对应的一簇相轨迹所组成的图 叫做相平面图。 利用相平面图分析系统性能的方法称为相平面法。
7.3.2 相平面图的绘制
绘制相平面图可以用解析法、图解法和实验法。 1. 解析法 解析方法一般用于系统的微分方程比较简单或可 以分段线性化的方程。应用解析法求取相轨迹方程时 一般有二种方法:一种是对式(7-35)直接进行积分。 显然,这只有在上述方程可以进行积分时才能运用。 另一种方法是先求出x和对t的函数关系,然后消去t, 5 从而求得相轨迹方程。下面举例加以说明。
x
0
x
22
④ = 0。系统特征根为一对纯虚根。系统的自 由运动为等幅正弦振荡。给定初始点,系统的相平 面图为围绕坐标原点的一簇椭圆(参阅例7-1),系 统相平面图:
相平面法概念
相平面法概念嘿,朋友们!今天咱来聊聊相平面法这个有意思的概念。
你说这相平面法啊,就像是给一个复杂的动态系统画了一幅特别的地图。
想象一下,你在一个陌生的地方迷路了,这时候有一张详细的地图告诉你该往哪儿走,那是不是感觉特别踏实?相平面法就有那么点儿这个意思。
咱平常遇到的很多系统,它们的行为那叫一个复杂,一会儿这样一会儿那样,让人摸不着头脑。
但有了相平面法,就好像给这些系统的行为来了个大揭秘。
它能把系统的状态直观地展示在一个平面上,让咱能清楚地看到系统是怎么变化的,怎么从一种状态跑到另种状态的。
比如说一个弹簧振子系统吧,它的运动看起来挺乱的,但用相平面法一画,嘿,就清楚多了。
能看到它的速度和位置是怎么相互影响的,就像看一场精彩的表演一样。
这相平面法就像是一个神奇的工具,能让咱这些普通人也能看懂那些复杂系统的小秘密。
它可不是那种高高在上、让人望而生畏的东西哦,而是非常接地气的。
咱生活中不也有很多类似的情况吗?就好比你要去完成一个任务,一开始也是糊里糊涂的,不知道该从哪儿下手。
但要是能有个像相平面法这样的东西,给你把各种情况都展示清楚,那你不就心里有底了嘛!你说这相平面法是不是很厉害?它能让那些原本藏在暗处的系统行为都暴露出来,让咱能更好地理解和掌握。
而且它还很有趣呢,就像在探索一个神秘的世界,每发现一点新东西都让人兴奋不已。
所以啊,别小看了这相平面法,它可真是个宝贝!它能帮咱解决很多看似复杂的问题,让咱在面对那些让人头疼的系统时不再发怵。
总之,相平面法是个非常有用且有趣的概念,它就像一把钥匙,能打开我们对复杂系统理解的大门。
让我们一起好好利用它,去探索更多的未知吧!原创不易,请尊重原创,谢谢!。
非线性系统的分析-相平面1PPT课件

ii.作等倾线分布图 iii.从初始点出发,沿相邻等倾线间的
ai
ai
ai1 2
平均斜率依次作短直线便可画得。
2021
7
说明:等倾线未必都是直线,另外,为保证精 度,等倾线分布要有适当密度,密度可不一样。
例如 x2 nxn2x0 令 0.5, n1
i.等斜线方程:
y n2 x 1 x
i.等斜线分布图.
止条件。
2021
43
(1) 具有死区特性的非线性控制系统
2021
44
取
作为状态变量,
因为
,
2021
45
给定参数T=1, K k =1,根据二阶线性系统相
轨迹分析结果,可得奇点类型
区域 I:奇点(-△,0)为稳定焦点,相轨迹为向心
螺旋线(
);
区域 II:奇点(x,0),x∈(-△, △)为稳定焦点,
x+axbx0
则该线性化系统的奇点的性质取决于特征根在复平面
上的位置。设特征根为 1 , 2 ,根据 1 , 2 在复平面
的位置,可以有以下几种情况:
2021
12
①一对具有负实部的共轭复根 每条相轨迹都
以震荡方式无限地“卷向”平衡点,这种类型的 奇点称为稳定焦点。
②一对具有正实部的共轭复根 每条相轨迹都以
态,系统的相轨迹是围绕平衡点的一组封闭曲线。这 种奇点称为中心点。
2021
15
⑥特征根为两个符号相反的实根。此时每条相轨迹都 是先趋近平衡点,随后在尚未达到平衡点之前又 远离平衡点而去,只有4条孤立的相轨迹除外,其中
两条趋于平衡点,另两条从平衡点散出,这时奇点称 为鞍点。
2021
16
4.6+相平面法
1)原则上,它仅适用于一阶、二阶系统。这是因为在平面上绘 制函数曲线是比较容易的。在三维空间中绘制三阶系统的相轨迹 可能,但很困难,而绘制三维以上空间中的轨迹则是不可能的。 因此,只有在相平面上分析一阶、二阶系统。对于线性部分是高 阶的系统,如果可以降为二阶,也可以用相平面法分析。
解析法是一种最基本的方法。当系统的微分方程 比较简单,或者系统中非线性特性可以分段线性化时, 可以用解析法绘制相平面图。
一般情况下,用解析法是比较困难、甚至不可能 的。因此,常用图解法。目前比较常用的图解法有等 倾线法和 法两种。
实验法是利用模拟计算机绘制相轨迹,即用模拟 计算机模拟所研究的系统,根据示波器的显示,或记 录仪,绘制出系统的相轨迹。
显 然 , 在 奇 点 (x10 , x20 ) 处 ,x1 0 ,x2 0 , 因 此 , 从 数 学 上 看,x1 x10 ,x2 x20 是微分方程(4.112)的定常解.反映在相平
面图上,因为奇点处相轨迹的斜率
dx2 dx1
x 2 x1
0是一不确定的
0
形式,所以可有多条相轨迹通过奇点,所以,奇点是相
0
x1
P x2
0
x1
Q x2
x2
0
x2
0
(4.117)
所考察系统在奇点附近的相轨迹的形状和一次项有密 切关系,因此,我们先讨论它的一次近似方程组的相 轨迹形状,然后借助于一次近似讨论原方程的奇点性 质。更一般地,考察一般二阶线性方程奇点的性质。
2 二阶线性系统的相轨迹及奇点
考察二阶线性微分方程:
4.6.1 相平面
1 相平面的定义
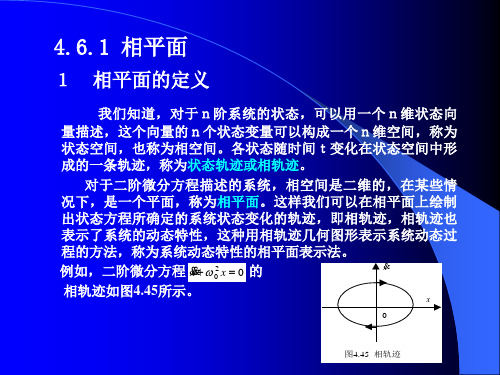
第7章--相平面法
若输出的一次谐波分量为
y1 (t) A1 cost B1 sint Y1 sin(t 1 )
输入的正弦量为 X sin t
则描述函数的数学表达式如式 (7-75) 所示:
返回子目录
N
Y1 X
e
e e0 e e0
e r c
得到 Te e Ku Tr r
假定
1 1 1
2 KT
2 kKT
54
(1)阶跃输入 r(t)=R
• 系统方程变为
Te e Ke 0
Te e kKe 0
图7-51 阶跃输入下得相轨迹
55
(2)输入信号r(t)=Vt+R
• 其中y(t)与c(t)两个状态变量之间满足导函数关 系
d
•
y(t) c(t) dt
•
• 将相变量定义为满足导函数关系的一组状态变 量。显然,相变量也不唯一
• 相平面法仅适用于研究二阶或一阶系统
2
c
o
a)
c(t)
c
o
t b)
o
c(t)
t
c)
3
• 图c是响应的时域曲线,图b是它的导函数曲 线,图a是以t为参变量,将输出响应特性及其导 函数特性绘在相平面上的曲线--输出响应特性 的“相轨迹”曲线 输出特性上既包含输出量大小的信息,也包含 它的导函数信息,特性上点的切线斜率就是该 点的导数
34
1、 在 c>h的区域
系统方程为
Tc(t) c(t) KM
c(t)
k1
k e(1/T )t 2
KMt
其中 k1 c0 (c0 KM )T k2 (c0 KM )T
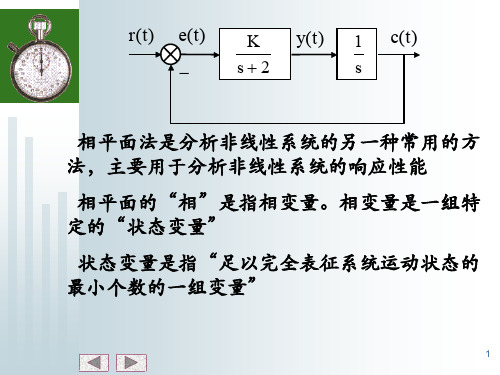
相平面法

度同时为0。 ⑸ 对于二阶系统来说,系统在奇点处不再发生运动, 处于平衡状态,故相平面的奇点亦称为平衡点。且
二阶系统的平衡点即为原点(0,0)。
3、线性二阶系统奇点的类型: ⑴ 焦点——特征根为共轭复根
根据这一方程可在相 平面上作一曲线,称为等倾线。
当轨迹经过该等倾线上任一点时,其切线的斜率都相
等,均为 。取
为若干不同 的常数,即可在相平
相平面上绘制出若干 条等倾线。在等倾线上各点处 作斜率为 的短直线,并以箭头表示切线方向,则 构成相轨迹的切线方向场。 所以,根据给定的初始条件,从初始点出发,便可
<一>奇点:
) 表示的二阶系统,其相轨 x f ( x , x 1、定义: 以微方
) dx f ( x, x 迹上每一点切线的斜率为 , dx x
)和 x 同时为0, 若在某点处 f ( x , x
0 dx 则称该点为相平面 即有 的不定形式, dx 0
的奇点。
的共轭复根( 0 1) 稳 定 焦 点 : 一 对 负 实 部 部的共轭复根( - 1 0) 不 稳 定 焦 点 : 一 对 正 实
2 n x dx dx x
dx n2 x d x 则 有x
2 x 2 x 2 A2 n
其中A是初条决定的积分常数,此为同心椭圆。
2、 0 1:
由第三章知: x ( t ) A e n t s in( d t ), d n 1
x02
01 x
x01
02 x
x01
x
相平面法——精选推荐
7.2 相平面法相平面法是一种在时域中求解二阶微分方程的图解法。
它不仅能分析系统的稳定性和自振荡,而且能给出系统运动轨迹的清晰图像。
相平面法一般适用于二阶非线性系统的分析。
7.2.1 相平面的基本概念图7-8 相轨迹291ξ=292293294295296297图7-11 确定相轨迹切线方向的方向场及相平面上的一条相轨迹7.2.3 非线性系统的相平面分析1. 利用二阶线性系统的相轨迹分析一类非线性系统例7-3 试确定下列方程的奇点及其类型,画出相平面图的大致图形。
(1)0sgn =++x x x (2)0||=+x x解 (1)系统方程可写为系统的奇点Ⅰ:1-=I e x Ⅱ:1=II e x系统特征方程为012=+s ,特征根j s ±=2,1,奇点为中心点。
画出系统的相平面图如图2987-12所示。
x 轴是两部分相轨迹的分界线,称之为“开关线”。
上、下两半平面的相轨迹分别是以各自奇点I e x 和II e x 为中心的圆,两部分相轨迹相互连接成为相轨迹图。
由图可见,系统的自由响应运动最终会收敛到)1,1(-之间。
奇点在)1,1(-之间连成一条线,称之为奇线。
图7-12 相轨迹图 图7-13 相轨迹图(2)系统方程可写为特征方程、特征根和奇点为Ⅰ:012=+s ,j s ±=2,1, 奇点0=eI x (中心点) Ⅱ:012=-s , 12,1±=s , 奇点0=eII x (鞍点)画出系统的相平面图如图7-13所示。
x轴是开关线,左半平面相轨迹由鞍点决定,右半平面相轨迹由中心点确定。
由图可见,系统的自由响应总是会向x 轴负方向发散,系统不稳定。
2. 非线性系统相平面分析大多数非线性控制系统所含有的非线性特性是分段线性的,或者可以用分段线性特性来近似。
用相平面法分析这类系统时,一般采用“分区一衔接”的方法。
首先,根据非线性特性的线性分段情况,用几条分界线(开关线)把相平面分成几个线性区域,在各个线性区域内,各自用一个线性微分方程来描述。
自动控制原理相平面法知识点总结
自动控制原理相平面法知识点总结自动控制原理相平面法是控制工程中的重要方法之一,通过将系统的转移函数映射到相平面上进行分析,可以得到系统的稳定性、动态响应等性能指标。
以下是对自动控制原理相平面法的知识点总结:1. 相平面的概念及表示相平面是用来表示系统传递函数的一种图形化工具,通常由实部和虚部组成。
相平面上的点代表传递函数在不同频率下的响应,可以通过绘制相平面上的轨迹来分析系统的动态特性。
2. 极点和零点极点和零点是传递函数中的重要概念。
极点是使传递函数分母等于零的根,影响系统的稳定性和动态响应;零点是使传递函数分子等于零的根,影响传递函数在不同频率下的响应特性。
3. 映射关系和稳定性判断相平面法中的映射关系将传递函数的极点映射到相平面上,通过分析相平面上的极点位置可以判断系统的稳定性。
一般来说,当系统的所有极点位于相平面的左半平面时,系统是稳定的;当存在极点位于右半平面时,系统是不稳定的。
4. 频率响应和幅频特性频率响应是指系统在不同频率下的输出响应情况。
相平面法可以通过绘制Bode图来分析系统的频率响应及其幅频特性。
幅频特性描述了系统的增益对频率的依赖关系,可以用来评估系统的稳定性和频率衰减特性。
5. 极点分布和动态响应传递函数的极点分布可以直接反映系统的动态响应特性。
相平面法可以通过绘制极点分布图来分析系统的阻尼比、超调量等动态性能指标。
例如,共轭复根表示系统存在振荡;实部大于零的极点会导致系统的不稳定和不良的动态特性。
6. 根轨迹分析根轨迹是描述系统极点随参数变化而形成的轨迹。
根轨迹可以通过绘制相平面上函数极点的运动轨迹来分析系统的稳定性和动态响应。
根轨迹的性质包括起点、终点、对称性等,可以提供关于系统稳定性和响应特性的重要信息。
7. 闭环稳定判据通过相平面法可以得到闭环传递函数的极点位置,进而判断闭环系统的稳定性。
常用的闭环稳定判据包括Nyquist判据和Routh-Hurwitz判据。
相平面法_HJ
f ( x, x ) x
11
x 例 系统方程 x x 0 ,用等倾斜线法绘制系统相轨迹图。 dx x ) ( x x) x ( x x 解 dx x
为一常数。
根据上式可在相平面上绘制一条线,相轨迹通 过这条线上的各点时,其切线的斜率都相同, 称之为等倾线。如果取不同的值 1 , 2 ,则可 在相平面上绘制一系列的等倾线。
9
( x10 , x20 ) 1
x2
2
3
x1
4
图8-27 用等倾线法绘制相轨迹
相平面中所有等倾线上的短线,组成了相轨迹的切线场。
§8.4
相平面法
相平面法是Poincare在1885年首先提出来的, 它是一种求解一、二阶常微分方程的图解 法。这种方法的实质是将系统的运动过程 形象地转化为相平面上一个点的移动,通 过研究这个点移动的轨迹,就能获得系统 运动规律的全部信息。由于它能比较直观、 准确、全面地表征系统的运动状态,因而 获得广泛应用。
将(4)式代入(2)式整理得
( 4)
1
28
r r (1 r 2 ) 1
有r 0和1 r 2 0两种情况
(1) r 0
x1 0, x2 0 系统的平衡点(奇点)
b P ( x1 , x 2 ) 1 x 2 ( 0,0 )
系统特征方程为
I A (a d ) (ad bc ) 0
2
特征方程的根为
1, 2
a d (a d )2 4(ad bc ) 2
根据特征方程根的性质,可将奇点分为如下几种情况:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7.2 相平面法相平面法是Poincare. H 于1885年首先提出来的,它是求解一、二阶线性或非线性系统的一种图解法,可以用来分析系统的稳定性、平衡位置、时间响应、稳态精度以及初始条件和参数对系统运动的影响。
7.2.1 相平面的基本概念1.相平面、相轨迹设一个二阶系统可以用常微分方程0),(=+x x f x&&& (7-5) 来描述。
其中是),(xx f &x 和的线性或非线性函数。
在非全零初始条件(,)或输入作用下,系统的运动可以用解析解和描述。
x &0x 0x &)(t x )(t x&取x 和构成坐标平面,称为相平面,系统的每一个状态均对应于该平面上的一点。
当变化时,这一点在x&t x -平面上描绘出的轨迹,表征系统状态的演变过程,该轨迹就叫做相轨迹,如图7.8(a)所示。
x&图7-8 相轨迹2.相平面图相平面和相轨迹曲线簇构成相平面图。
相平面图清楚地表示了系统在各种初始条件或输入作用下的运动过程,可以用来对系统进行分析和研究。
7.2.2 相轨迹的性质1.相轨迹的斜率相轨迹在相平面上任意一点处的斜率为 ),(xx &d d d (,d d d )−==&&&&xx t f x x x x t x(7-6) 只要在点处不同时满足和),(xx &0=x &0),(=x x f &,则相轨迹的斜率就是一个确定的值。
这样,通过该点的相轨迹不可能多于一条,相轨迹不会在该点相交。
这些点是相平面上的普通点。
2.相轨迹的奇点相平面上同时满足和0=x&0),(=x x f &的点处,相轨迹的斜率 d (,)d 00−==&&&xf x x x x即相轨迹的斜率不确定,通过该点的相轨迹有一条以上。
这些点是相轨迹的交点,称为奇点。
显然,奇点只分布在相平面的x 轴上。
由于在奇点处,0==x x &&&,故奇点也称为平衡点。
3.相轨迹的运动方向相平面的上半平面中,,相迹点沿相轨迹向0>x&x 轴正方向移动,所以上半部分相轨迹箭头向右;同理,下半相平面0<x&,相轨迹箭头向左。
总之,相迹点在相轨迹上总是按顺时针方向运动的。
4.相轨迹通过x 轴的方向相轨迹总是以垂直方向穿过x 轴的。
因为在x 轴上的所有点均满足,所以除去其中的奇点外,在其他点上的斜率0x=&(,)0f x x=&d d →∞&x x 。
这表示相轨迹与相平面的x 轴是正交的。
7.2.3 相轨迹的绘制绘制相轨迹是用相平面法分析系统的基础。
相轨迹的绘制方法有解析法和图解法两种。
解析法通过求解系统微分方程找出x 和的解析关系,从而在相平面上绘制相轨迹。
图解法则通过作图方法间接绘制出相轨迹。
x&1.解析法描述系统的微分方程比较简单时,适合于用解析法绘制相轨迹。
例如,研究以方程22n n x x x ξωω++&&&0= (7-7)描述的二阶线性系统在一组非全零初始条件下的运动。
当0=ξ时,式(7-7)变为20n x x ω+=&&考虑到2d d d d 0d d d d ω====−=&&&&&&n x x x x x x t x t xx用分离变量法进行积分,有2d d n x x x ω=−&&x002d d xxn xx x x x ω=−∫∫&&&&x222n x2x A ω+=& (7-8)式中,A =(,)决定的常数。
式(7-8)表示相平面上以原点 0x 0x&为圆心的椭圆。
当初始条件不同时,相轨迹是以 (,)为起始点的椭圆族。
系统的相平面图如图7-9所示,表明系统的响应是等幅周期运动。
图中箭头表示时间增大的方向。
0x 0x&t 2.图解法绘制相轨迹的图解法有多种,其中等倾斜线法简单实用,在实际中被广泛采用。
等倾斜线法是一种通过图解方法求相轨迹的方法。
由式(7-6)可求得相平面上某点处的相轨迹斜率d (,d )−=&&&xf x x xx 若取斜率为常数α,则上式可改写成(,)f x xx−α=&& (7-9) 式(7-9)称为等倾斜线方程。
很明显,在相平面中,经过等倾斜线上各点的相轨迹斜率都等于α。
给定不同的α值,可在相平面上绘出相应的等倾斜线。
在各等倾斜线上作出斜率为α的短线段,就可以得到相轨迹切线的方向场。
沿方向场画连续曲线就可以绘制出相平面图。
以下举例说明。
例7-1 设系统微分方程为,用等倾斜线法绘制系统的相平面图。
0x x x ++=&&&解 由系统微分方程,有(),(dx)x x xxx xdx=−+=−+&&&&&& 设xxd d &=α为定值,可得等倾斜线方程为 α+−=1xx& (7-10) 式(7-10)是直线方程。
等倾斜线的斜率为)1/(1α+−。
给定不同的α,便可以得出对应的等倾斜线斜率。
表7-1列出了不同α值下等倾斜线的斜率以及等倾斜线与x 轴的夹角β。
表7-1 不同α值下等倾斜线的斜率及ββ10° 20° 30° 40° 50° 60° 70° 80° 90°图7-10 确定相轨迹切线方向的方向场及相平面上的一条相轨迹图7-10绘出了α取不同值时的等倾斜线,并在其上画出了代表相轨迹切线方向的短线段。
根据这些短线段表示的方向场,很容易绘制出从某一点起始的特定的相轨迹。
例如,从图7-10中的A 点出发,顺着短线段的方向可以逐渐过渡到B 点、C 点……,从而绘出一条相应的相轨迹。
由此可以得到系统的相平面图,如图7-10所示。
7.2.4 由相轨迹求时间解相轨迹能清楚地反映系统的运动特性。
而由相轨迹确定系统的响应时间、周期运动的周期以及过渡过程时间时,会涉及由相轨迹求时间信息的问题。
这里介绍增量法。
设系统相轨迹如图7-11(a)所示。
在时刻系统状态位于点,经过一段时间后,系统状态移动到新的位置点A t (,)A A A x x&AB t Δ(,)B B B x x&。
如果时间间隔比较小,两点间的位移量不大,则可用下式计算该时间段的平均速度:B AAB AB x x x xt t −Δ==ΔΔ& 又由 2A B AB xx x+=&&& 可求出点A 到点B 所需的时间2()B A AB A Bx x t x x −Δ=+&& (7-11)同理可求出点B 和点C 之间所需的时间BC t Δ……利用这些时间信息以及对应的()x t ,就可绘制出相应的()x t 曲线,如图7-11(b)所示。
图7-11 由相轨迹求时间解注意,在穿过x 轴的相轨迹段进行计算时,最好将一点选在x 轴上,以避免出现。
0AB x =&7.2.5 二阶线性系统的相轨迹许多本质性非线性系统常常可以进行分段线性化处理,而许多非本质性非线性系统也可以在平衡点附近做增量线性化处理。
因此,可以从二阶线性系统的相轨迹入手进行研究,为非线性系统的相平面分析提供手段。
由式(7-7)描述的二阶线性系统自由运动的微分方程022=++x x x n n ωξω&&&可得22n n x x dx dx xωξω+=−&&& (7-12)根据式(7-12)利用等倾斜线法,或者从式(7-12)解出系统的相轨迹方程1()xf x =&,就可以绘制出相应的相平面图。
将不同情形下的二阶线性系统相平面图归纳整理,列在表7-2中。
在式(7-7)中,令,可以得出唯一解0x x ==&&&0e x =,这表明线性二阶系统的奇点(或平衡点)就是相平面的原点。
根据系统极点在复平面上的位置分布,以及相轨迹的形状,将奇点分为不同的类型。
(1)当1ξ≥时,1λ,2λ为两个负实根,系统处于过阻尼(或临界阻尼)状态,自由响应按指数衰减。
对应的相轨迹是一簇趋向相平面原点的抛物线,相应奇点称为稳定的节点。
(2)当10<<ξ时,1λ,2λ为一对具有负实部的共轭复根,系统处于欠阻尼状态。
自由响应为衰减振荡过程。
对应的相轨迹是一簇收敛的对数螺旋线,相应的奇点称为稳定的焦点。
(3)当0=ξ时,1λ,2λ为一对共轭纯虚根,系统的自由响应是简谐运动,相轨迹是一簇同心椭圆,称这种奇点为中心点。
(4)当01<<−ξ时,1λ,2λ为一对具有正实部的共轭复根,系统的自由响应振荡发散。
对应的相轨迹是发散的对数螺旋线。
相应奇点称为不稳定的焦点。
(5)当1−<ξ时,1λ,2λ为两个正实根,系统的自由响应为非周期发散状态。
对应的相轨迹是发散的抛物线簇。
相应的奇点称为不稳定的节点。
(6)若系统极点1λ,2λ为两个符号相反的实根,此时系统的自由响应呈现非周期发散状态。
对应的相轨迹是一簇双曲线,相应奇点称为鞍点,是不稳定的平衡点。
当系统至少有一个为零的极点时,很容易解出相轨迹方程(见表7-2中序号7,8,9),由此绘制相平面图,可以分析系统的运动特性。
表7-2 二阶线性系统的相轨迹系统方程 序 号 方程 参数 极点分布相轨迹奇点 相轨迹方程 1 1ξ≥(0,0)特殊相轨迹:稳定 节点抛物线 (收敛)12x x λxx λ=⎧⎨=⎩&&201ξ<<(0,0) 稳定 点(收敛)3焦 螺线0ξ=(0,0) 中心点椭圆410ξ−<<不稳定(发散)5(0,0)焦点 螺线220n nx xx ξωω++=&&&1ξ<−(0,0)不稳定 节点 抛物线 发散)特殊相轨迹:(12x x xx λλ=⎧⎨=⎩&&6a b ⎧⎨>⎩任意(0,0)鞍点双曲线 特殊相轨迹:12x x xx λλ=⎧⎨=⎩&&70a b >⎧⎨=⎩x 轴0xx ax C =⎧⎨=−+⎩&&80a b <⎧⎨=⎩x 轴0xx ax C =⎧⎨=−+⎩&&9xax bx +−=&&&0a b =⎧⎨=⎩x 轴xC =&7.2.6 非线性系统的相平面分析1.非本质非线性系统的相平面分析如果描述非线性系统的微分方程式(7-5)中,函数(,)f x x&是解析的,则可在平衡点处将其进行小偏差线性化近似,然后按线性二阶系统分析奇点类型,确定系统在该奇点附近的稳定性。