相平面分析资料
非线性-第二章

第2章相平面分析方法212.1相平面分析的概念2.2 线性系统的相平面分析2.3 非线性系统的相平面分析2.1 相平面分析的概念211i 2.1.1 相平面图(Phase portraits )二阶自治系统1112(,)xf x x =&(2.1)a 2212(,)xf x x =&(2.1)b 以状态x 1与x 2为坐标的平面,称为相平面。
给定一对初值(0)=x (0)x 0,可以确定系统的一个解,在相平面中得到一条相平面轨线。
对不同初值的一簇相平面轨线称为系统的相平面图(相图)。
例2.1质量-弹簧系统k =1m=1&&系统的动态方程x x +=假设质点初始位置在x 0,其解为0()cos x t x t ==−&0()sin xt x t 相轨线方程2&22x xx +=图2.1 质量-弹簧系统相平面图相图的作用:一旦得到系统的相图,则系统对应于不同初值的特性即21展漏无遗。
从例2.1可以看出,系统的相轨线既不趋于零也不趋于无穷,而是以原点为中心的同心圆,表示系统处于临界稳定状态。
2.1.2 奇异点(Singular point)满足=奇异点是相平面上的一个平衡点。
112212(,)0(,)0f x x f x x=对线性系统,奇异点通常只有一个。
对非线性系统,则经常存在多个孤立的奇异点。
20.630x xx x +++=&&&例2.2二阶非线性系统两个奇异点:收敛区0x =3x =−奇异点是相平面不稳定奇异点的重要特征。
线性系统的稳定性完全由奇异点的本质决定,而非线性系统则会存在一些复杂22特征。
图2.2 系统相平面图2.2 线性系统的相平面分析0x axbx ++=&&&考虑下面二阶线性系统(2.2)系统的解为121212(),t tx t k e k e λλλλ=+≠111212(),ttx t k e k te λλλλ=+=系统(22)(2.2)只有一个奇异点(设b ≠0),但奇异点附近的系统轨线根据参数a 和b 的不同表现出不同的特征。
相平面分析实验报告(3篇)
第1篇一、实验目的1. 理解相平面的概念及其在控制系统中的应用;2. 掌握相平面分析方法,通过分析相轨迹图,了解系统的动态特性;3. 分析饱和非线性环节对控制系统性能的影响。
二、实验原理相平面分析是一种研究非线性系统动态特性的方法。
它通过将系统的状态变量绘制在二维平面上,形成相轨迹图,从而直观地观察系统的运动规律。
在相平面上,系统的状态变量可以是系统的位置和速度,也可以是系统的其他两个相互独立的变量。
本实验主要研究带有饱和非线性环节的控制系统。
饱和非线性环节具有上限和下限,当输入信号超出这个范围时,系统的输出将不再改变。
在相平面上,饱和非线性环节表现为相轨迹的折线。
三、实验设备1. PC机一台;2. MATLAB软件;3. Simulink模块库。
四、实验步骤1. 建立控制系统模型根据实验要求,建立带有饱和非线性环节的控制系统模型。
首先,建立系统的传递函数,然后添加饱和非线性环节模块。
2. 设置仿真参数设置仿真参数,包括仿真时间、采样时间等。
3. 运行仿真运行仿真,观察系统输入饱和非线性环节前后的相轨迹图。
4. 分析相轨迹图对比有无非线性环节的相轨迹图,分析饱和非线性环节对系统性能的影响。
5. 求解超调量在输入单位阶跃信号的情况下,计算系统的超调量。
五、实验结果与分析1. 相轨迹图分析在饱和非线性环节的影响下,系统的相轨迹图发生了明显的变化。
当输入信号超出饱和非线性环节的上下限时,相轨迹图出现折线。
这表明饱和非线性环节限制了系统的运动范围,影响了系统的动态性能。
2. 系统性能分析通过对比有无非线性环节的相轨迹图,可以发现饱和非线性环节对系统的超调量和上升时间有一定影响。
当饱和非线性环节存在时,系统的超调量增大,上升时间变长。
这是因为饱和非线性环节限制了系统的运动范围,导致系统在达到稳定状态之前需要更多的能量。
3. 超调量计算在输入单位阶跃信号的情况下,系统的超调量为:超调量 = (终值 - 原始值) / 原始值其中,终值为系统稳定后的输出值,原始值为输入信号的幅值。
相平面法ppt课件
有可能出现在x轴上。
11
忽略高阶无穷小, 一般情况下令 x10 x20 0
则有
P( x1,
x2 )
P( x1, x1
x2 )
(0,0)
x1
P( x1, x2
x2 )
(0,0)
x2
Q( x1,
x2 )
Q( x1, x1
x2 )
(0,0)
x1
Q( x1, x2
x2 )
(0,0)
x2
令 a P( x1, x2 )
平面上绘制一系列的等倾线。
8
x2
1
( x10 , x20 )
2
3 x1
4
图8-27 用等倾线法绘制相轨迹
1,2 ,表3示,相轨迹通过这些等倾线时切线的斜率。
相平面中所有等倾线上的短线,组成了相轨迹的切线场。 从相轨迹起始点 ( x10, x20 ) 出发,平滑的将相邻等倾线上 的短线连起来,即得系统相轨迹。
§8.4 相平面法
相平面法是Poincare在1885年首先提出来的, 它是一种求解一、二阶常微分方程的图解 法。这种方法的实质是将系统的运动过程 形象地转化为相平面上一个点的移动,通 过研究这个点移动的轨迹,就能获得系统 运动规律的全部信息。由于它能比较直观、 准确、全面地表征系统的运动状态,因而 获得广泛应用。
1,2
2
5)纯虚根
(a d ) 0, ad bc 0
奇点称为中心点。 x2
0
x1
图8-32 纯虚根对应的相轨迹
18
2、极限环
相平面图上的一根孤立的封闭相轨迹称为极限环。它对应系统 的自激振荡状态。极限环把相平面划分为内部平面和外部平面 两部分,相轨迹不能从环内穿越环进入环外,反之也不能。
第7章_2相平面法

12
极限环的分类 稳定极限环 当 t → ∞ 时,在极限环邻域内的所有轨迹都收敛 于该极限环, 这样的极限环称为稳定极限环 稳定极限环。 稳定极限环 它表示系统的运动是一种稳定的带固有周期的 自持振荡。 在系统设计时,应尽可能减小极限环, 以满足稳态精度的要求。
13
& x
极限环外部稳定 极限环内部不稳定
5
4 负阻尼情形
−1 < ζ < 0
jω
& x
λ1
0
σ
λ2
0
x
不稳定焦点
λ1,2 = −ζωn ± jωd
6
ζ < −1
jω
& x
λ1 λ2
0
σ
0
x
不稳定节点 正实特征根 −ζωn ± ωn ζ 2 − 1
7
5 给定二阶线性系统的微分方程
2 && + 2ζωn x − ωn x = 0 & x
I区
II区
27
& e
a=0
KM
−e0
0
e0
e
a=0
II区
28
− KM
III区 I区
& e
KM
−e0
0
e0
e
− KM
III区 I区 II区
29
2 输入信号为 r (t ) = R + vt 时 a)v > KM , M = e0 ) 稳态误差为无穷大!
& e
v + KM
A
v − KM
−e0
0
e0
2
1 无阻尼情形(ζ = 0 )
相平面

第一讲
第八章 非线性控制系统分析
第一讲
本节课基本要求 相平面法分析法 了解非线性系统基本概念、特点。掌握几种常见的非线性迹。
重点:掌握几种常见的非线性特性
难点:相轨迹绘制
主要内容:
8-1 非线性控制系统概述
1.非线性控制系统
非线性:指元件或环节的静特性不是按线性规律变化。 非线性系统:如果一个控制系统,包含一个或一个以上具有非线性静特性的元件或环节,
第一讲
注意:
1)坐标轴 x 和 x& 应选用相同的比例尺,以便于根据等倾线斜率准确绘制等倾线上一
点的相轨迹切线。
2)在相平面的上半平面,由于 x& > 0 ,则 x 随 t 增大而增加,相轨迹的走向应是由左
向右,在相平面的下半平面 x& < 0 ,则 x 随 t 增大而减小,相轨迹的走向应由右向左。
e(t) ≤ a e(t) > a
200
第八章 非线性控制系统分析
第一讲
(3)饱和特性
⎧ke(t)
y (t )
=
⎪ ⎨
⎪⎩kasigne(t)
e(t) ≤ a e(t) > a
signe(t)
=
⎩⎨⎧+−
1 1
e(t) > 0 e(t) < 0
式中 a − 线性区宽度 k − 线性区特性的斜率
(4)间隙特性
⎪
y(t)
=
⎪⎪ ⎨
0
− a < e(t) < ma, e&(t) < 0
bsigne(t)
e(t) ≥ a
⎪ ⎪
b
e(t) ≥ ma, e&(t) < 0
第七章相平面法2010
一、相平面的基本概念 二、相轨迹的绘制 三、由相轨迹求系统的瞬态响应 四、奇点与极限环 五、非线性系统的相平面分析
1
一、相轨迹的基本概念
解决两个问题: 1.什么是相轨迹? 2.相轨迹的几个重要性质。
2
(一)相轨迹的基本概念
相平面法是状态空间法在二维空间特殊情况下的应用。 它是一种通过图解法求解一阶或二阶线性或非线性系统的 准确方法。它可以给出某一平衡状态稳定性的信息和系统 运动的直观图像。所以,它属于时间域的分析方法。
12
等倾线与相轨迹
x n2 x 2n
设系统参数 ξ=0.5,ω=1。求得 对应于不同α 值的等 倾线
x
- 1.2 - 1.4
k= - 1
A
B
- 1.6 - 1.8 -2
C D
- 2.5 -3
0
- 1.4 - 1.2
- 0.8- 0.6- 0.4- 0.20
1 0.5
-4 -6
对于二阶时不变系统,可用以下常微分方程来描述:
x f (x, x) 0
设: x1 x x2 x
x1 x x2 则: x2 x f (x1 , x2 )
3
相平面、相轨迹、相平面图
x
定义:
X
(t
)
x1 x2
为状态变量。
0
x
我们将 (x , x ) 构成的直角平面叫做相平面。
- 11 x
9 4 2
13
用等倾线法相轨迹绘制
14
三、由相轨迹求系统的瞬态响应
相轨迹是消去时间后画出的,尽管它直观地给出了系 统状态的运动轨迹,但却将时间信息隐含其中,使时间信 息变得不直观了。有时我们希望给出时间响应以便得到与 时间有关的性能指标,这就需通过相轨迹求出时间信息。
7-2相平面法

当c > 0时,上述微分方程又可以表示为
2 2 n x n x 0 x
线性二阶系统的特征根
b b 4c s1 2
2
b b 2 4c s2 2
相轨迹方程为
dx bx cx dx x
假设由初始条件确定的点为图中的A点。则过A点作斜率为[ (1) + (1.2) ] / 2 = 1.1的直线,与a = 1.2的等倾线交于B点。再过B 点作斜率为的[ (1.2 ) + (1.4) ] / 2 = 1.3 直线,与a = 1.4的等 倾线交于C点。如此依次作出各等倾线间的相轨迹线段,最后即 得系统近似的相轨迹。
x t4
(x, x0)
t3
0 t2 0
t1
x
x
t1
t2 t3 t4
4
当t变化时,系统状态在相 平面上移动的轨迹称为相轨迹。
t
而与不同初始状态对应的一簇相轨迹所组成的图 叫做相平面图。 利用相平面图分析系统性能的方法称为相平面法。
7.3.2 相平面图的绘制
绘制相平面图可以用解析法、图解法和实验法。 1. 解析法 解析方法一般用于系统的微分方程比较简单或可 以分段线性化的方程。应用解析法求取相轨迹方程时 一般有二种方法:一种是对式(7-35)直接进行积分。 显然,这只有在上述方程可以进行积分时才能运用。 另一种方法是先求出x和对t的函数关系,然后消去t, 5 从而求得相轨迹方程。下面举例加以说明。
x
0
x
22
④ = 0。系统特征根为一对纯虚根。系统的自 由运动为等幅正弦振荡。给定初始点,系统的相平 面图为围绕坐标原点的一簇椭圆(参阅例7-1),系 统相平面图:
第2章相平面分析201-资料
(x,x)
x
(x,x)
0
x
相轨迹对称于原点
f( x ,x ) f( x , x )
2.相平面上的奇点
由相轨迹的斜率方程 d xd x 可f( 知x ,,相x )平x 面上的点
只要不(同x,时x)满足
,则x 该 点0 ,相f轨(x 迹,x 的) 斜0 率是唯一确定
的。
这样的点称为普通点。通过普通点的相轨迹只有一条。
用xf来(x表)示。
x(t)
x
t
x
方程的解
1.相轨迹:如果我们取 x 和 作x为平面的直角坐标,则
系统在每一时刻的 (x,均x)相应于平面上的一点。当 t 变化时, 这一点在 平面x上将x 绘出一条相应的轨迹-----相轨迹。
它描述系统的运动过程。
2.相平面: x x平面称为相平面。对于一个系统,初始条件
f(x,x) xf(x,x)
x 给 定 一 个 α值 ,可 由 上 式 求 得 一 条 等 倾 线 ; 给 定 一 组 α值 ,则 可 求 得 一 组 等 倾 线 族 ,它 们 确 定 了 相 平 面 中 相 轨 迹 斜 率 的 分 布 .
设系统方程为: x 2x 2x 0
上式改写为:
x dx 2x 2x 0
一、相轨迹的共同特性
1.相轨迹的对称性
相轨迹的对称性可以从对称点上相轨迹的斜率来判断。 设二阶系统的方程为:
改写为:
xfx,x0
x = d x = d x d x = x d x , x d x fx ,x
d t d xd t d x d x
两边除以 dx 可x得: dt
dx f x,x----相轨迹的
dx
x 斜率方程
相平面
dx
x
横轴上的点皆为奇点。
积分法
由于相轨迹方程表示成
dx dx
f ( x, x)
x
当 f ( x, x) ( x) 即仅是x的函数
则有 x d x ( x)dx 两边分别积分,即解出该方程的相轨迹
例:
x M
x
d
x
M
可解得
dx
x
2
2
因此
T c c Kx (1)
而 e r c (或c r e)
代入(1)式,得
T (r e) (r e) Kx (2)
e 0
T e e KM T r r
e 0
T e e KM T r r
非线性控制系统的相平面分析法
描述函数对非线性环节有限定条件,并且不能 直接分析初始条件对非线性系统的影响。也就 是说,它只能用于非线性系统的稳定性分析。
相平面以运动中的两个重要的状态量(速度和 位置)作为坐标,将运动的变迁过程表现在平 面上,不仅可直观地表现线性系统运动特点, 更为非线性系统提供了一种有效的分析手段。
II区是欠阻尼运动,相应的奇点(0,0)是
稳定的焦点。轨迹越过区域边界,运动规律
随之改变。由于两个线性方程具有共同的奇
点。且在I区内,运动最终以过 阻尼形式收
敛于该奇点。
e
II
I
II
0
e
r
e GN
xK
s(Ts 1)
M -M
C
c(s) K
自动控制原理之非线性控制系统的相平面分析总结

7-5 非线性控制系统的相平面分析一、线性控制系统的相平面分析1、阶跃响应 设线性二阶控制系统如图7-38所示。
若系统开始处于平衡状态。
试求系统在阶跃函数)(1)(0t R t r ⋅= 作用下,在ee -平面上的相轨迹。
建立系统微分方程式,由图示系统可得Ke c cT =+ 因为c r e -=,代入上式得r r T Ke e eT +=++ (7-31) 对于->⋅=0),(1)(0t t R t r 时,0)()(==t r t r因此上式可写成0=++Ke e e T (7-32)方程(7-32)与(7-22)式相仿。
因为假设系统开始处于平衡状态,所以误差信号的初始条件是0)0(R e =和0)0(=e。
e e -平面上的相轨迹起始于)0,(0R 点,而收敛于原点(系统的奇点)。
当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a)所示。
根据ee -平面上的相轨迹就可方便的求得c c -平面上系统输出的相轨迹,如图7-39(b)所示。
由图7-39可见,欠阻尼情况下系统的最大超调量P σ及系统在稳态时的误差为零。
因为e e -平面相轨迹最终到原点,即奇点;所以在cc -平面上相轨迹最终到达0R c =的稳态值,则奇点坐标为)0,(0R 。
2、斜坡响应 对于斜坡输入t V t r 0)(=;当0>t 时,)(t r 的导数0)(V t r= 及0)(=t r 。
因此,方程(7-31)可以写成0V Ke e eT =++ 或 0)(0=-++KV e K e e T 令v e K V e =-0,代入上式,则有0V Ke ee T =++ννν (7-33) 在v v ee -平面上,方程(7-33)给出了相平面图与在e e -平面上方程(7-32)给出的相平面图是相同的。
应当指出,特征方程式的根确定了奇点的性质,在v v ee -平面上的奇点的位置是坐标原点,而在e e -平面上奇点坐标为)0,(0K V 点。
相平面法ppt课件
绘制相轨迹的目的是为了分析系统的运动特性; 由于系统的平衡点有无穷根相轨迹离开或到达,因此平衡 点附近的相轨迹,最能反映系统的运动特性。 平衡点又称为奇点。
另一反映系统运动特性的相轨迹是极限环(奇线)。 极限环是相平面上一根孤立的封闭的相轨迹,反映了系统 的自激振荡状态,它将无穷大的相平面分为两个部分,有 利于与奇点特性一起分析系统的运动特性。
e
y
0.5 0.5
e e 0 e e 0
e
区域(1) 区域(2)
(1)
0
e
(2)
e e 0
28
区域(1):
e 0.5 e 0.5t c1 e 0.25t 2 c1t c2
代入初始条件 e(0) 6, e,(0有) 0
e
0 (2)
(1)
A(6,0) e
e e 0
c1 0, c2 6
1,2
2
根据特征方程根的性质,可将奇点分为如下几种情况:
13
a d (a d )2 4(ad bc)
1,2
2
1) 同号相异实根
(a d )2 4(ad bc)
当 a d时 ,0 两根同负,奇点称为稳定的节点; 当 a d时 ,0 两根同正,奇点称为不稳定的节点。
图。
6
令
P( Q(
x1 x1
, ,
x2 x2
) )
0 0
联立求解出的点 ( x10 , x称20为) 系统的平衡点。
相轨迹的特点:
1、相平面上除平衡点外的任意一点只有一根相轨迹通过。 2、由式 dx2 Q可知0 ,相轨迹在平衡点附近切线斜率不定,
dx1 P 0 意味着有无穷多根相轨迹到达或离开平衡点。
7-2相平面法
为自变量, 为因变量的一阶微分方程。 以x1为自变量,以x2为因变量的一阶微分方程。二阶系 统常微分方程方程的解既可用x与 的关系来表示 方程的解既可用 的关系来表示, 统常微分方程方程的解既可用 与t的关系来表示,也可 的关系来表示。实际上, 用x2与x1的关系来表示。实际上,看作一个质点的运动 方程,则x1(t)代表质点的位置,x2(t)代表质点的速度。 方程, 代表质点的位置, 代表质点的速度。 代表质点的位置 代表质点的速度
或பைடு நூலகம்
等倾线是过相平面原点的一些直线。 等倾线是过相平面原点的一些直线。当ζ = 0.5、ωn = 1 、 时的等倾线分布图 :
9
a= −1
x
−1.2 B −1.4 −2 −3 −6
2 ɺ ωn x =− x α + 2ξω n = −1/(a +1)
A
C
a= −1,k = −∞ , a= −2,k = 1 , a= −3,k = 1/2 ,
2
描述二阶系统常微 用x1、x2描述二阶系统常微 分方程方程的解 方程的解, 分方程方程的解,也就是用质 点的状态来表示该质点的运动。 点的状态来表示该质点的运动。 在物理学中,状态又称为相 在物理学中,状态又称为相。 把由x 把由 1—x2所组成的平面 坐标系称为相平面 相平面, 坐标系称为相平面,系统的一 个状态则对应于相平面上的一 个点。 个点。 变化时, 当t变化时,系统状态在相 变化时 相轨迹。 平面上移动的轨迹称为相轨迹 平面上移动的轨迹称为相轨迹。
x 0 x
0
x
x
14
2。线性二阶系统 。 描述线性二阶系统自由运动的微分方程为
ɺɺ + bx + cx = 0 ɺ x
非线性系统的分析-相平面1PPT课件

ii.作等倾线分布图 iii.从初始点出发,沿相邻等倾线间的
ai
ai
ai1 2
平均斜率依次作短直线便可画得。
2021
7
说明:等倾线未必都是直线,另外,为保证精 度,等倾线分布要有适当密度,密度可不一样。
例如 x2 nxn2x0 令 0.5, n1
i.等斜线方程:
y n2 x 1 x
i.等斜线分布图.
止条件。
2021
43
(1) 具有死区特性的非线性控制系统
2021
44
取
作为状态变量,
因为
,
2021
45
给定参数T=1, K k =1,根据二阶线性系统相
轨迹分析结果,可得奇点类型
区域 I:奇点(-△,0)为稳定焦点,相轨迹为向心
螺旋线(
);
区域 II:奇点(x,0),x∈(-△, △)为稳定焦点,
x+axbx0
则该线性化系统的奇点的性质取决于特征根在复平面
上的位置。设特征根为 1 , 2 ,根据 1 , 2 在复平面
的位置,可以有以下几种情况:
2021
12
①一对具有负实部的共轭复根 每条相轨迹都
以震荡方式无限地“卷向”平衡点,这种类型的 奇点称为稳定焦点。
②一对具有正实部的共轭复根 每条相轨迹都以
态,系统的相轨迹是围绕平衡点的一组封闭曲线。这 种奇点称为中心点。
2021
15
⑥特征根为两个符号相反的实根。此时每条相轨迹都 是先趋近平衡点,随后在尚未达到平衡点之前又 远离平衡点而去,只有4条孤立的相轨迹除外,其中
两条趋于平衡点,另两条从平衡点散出,这时奇点称 为鞍点。
2021
16
《相平面分析》课件

傅里叶级数和傅里叶变换
傅里叶级数和傅里叶变换是对信号进行频谱分析的重要工具,它们可以将信号分解成一系列频率成分。
RC、RL、RCL电路的相平面分 析
相平面分析可以应用于分析RC、RL和RCL等电路,帮助理解电路的频率响应、 稳定性和传递函数。
线性时不变系统的相平面分析
相平面分析是研究线性时不变系统的常用方法,通过分析系统的零极点分布 和频率响应,可以了解系统的特性。
相平面分析的未来发展趋势
相平面分析作为一种重要的信号处理和控制系统分析方法,随着科学技术的发展,将继续发展并得到更 广泛的应用。
极性和共轭
复数的极性表示复数的模和角度,共轭用于表示复数的共轭对称性质,在相平面分析中有重要的应用。
大角度相位移
大角度相位移是相平面分析中的一个重要概念,描述了信号在复平面上的相位偏移,可以用于分析系统 的稳定性。
时域和频域之间的转换
相平面分析提供了在时域和频域之间转换的方法,可以将信号从时域表示转 换为频域表示,或者反之。
Karnaugh图和相平面分析的关 系
相平面分析和Karnaugh图是两种不同的分析方法,可以互补使用,帮助理解 逻辑电路和时域系统的行为。
相平面分析的局限性和不足
相平面分析虽然是一种重要的分析工具,但它也有一些局限性,例如无法分析非线性和时变系统,以及 对大规模系统的分析需要较高的计算复杂度。
相平面坐标系概述
相平面坐标系通过使用实部和虚部来表示复数,以一种直观的方式将信号和 系统表示在平面上。
欧拉公式和复参数
欧拉公式是描述复数的重要公式,它将复数表示为指数和三角函数的关系,复参数在相平面分析中起着 重要作用。
相平面上的运算
在相平面上,可以进行复数的加减乘除运算,这些运算在相平面分析中用于 计算信号的频谱和系统的响应。
第7章--相平面法
若输出的一次谐波分量为
y1 (t) A1 cost B1 sint Y1 sin(t 1 )
输入的正弦量为 X sin t
则描述函数的数学表达式如式 (7-75) 所示:
返回子目录
N
Y1 X
e
e e0 e e0
e r c
得到 Te e Ku Tr r
假定
1 1 1
2 KT
2 kKT
54
(1)阶跃输入 r(t)=R
• 系统方程变为
Te e Ke 0
Te e kKe 0
图7-51 阶跃输入下得相轨迹
55
(2)输入信号r(t)=Vt+R
• 其中y(t)与c(t)两个状态变量之间满足导函数关 系
d
•
y(t) c(t) dt
•
• 将相变量定义为满足导函数关系的一组状态变 量。显然,相变量也不唯一
• 相平面法仅适用于研究二阶或一阶系统
2
c
o
a)
c(t)
c
o
t b)
o
c(t)
t
c)
3
• 图c是响应的时域曲线,图b是它的导函数曲 线,图a是以t为参变量,将输出响应特性及其导 函数特性绘在相平面上的曲线--输出响应特性 的“相轨迹”曲线 输出特性上既包含输出量大小的信息,也包含 它的导函数信息,特性上点的切线斜率就是该 点的导数
34
1、 在 c>h的区域
系统方程为
Tc(t) c(t) KM
c(t)
k1
k e(1/T )t 2
KMt
其中 k1 c0 (c0 KM )T k2 (c0 KM )T
相平面02
7.2 相平面法相平面法是一种在时域中求解二阶微分方程的图解法。
它不仅能分析系统的稳定性和自振荡,而且能给出系统运动轨迹的清晰图像。
相平面法一般适用于二阶非线性系统的分析。
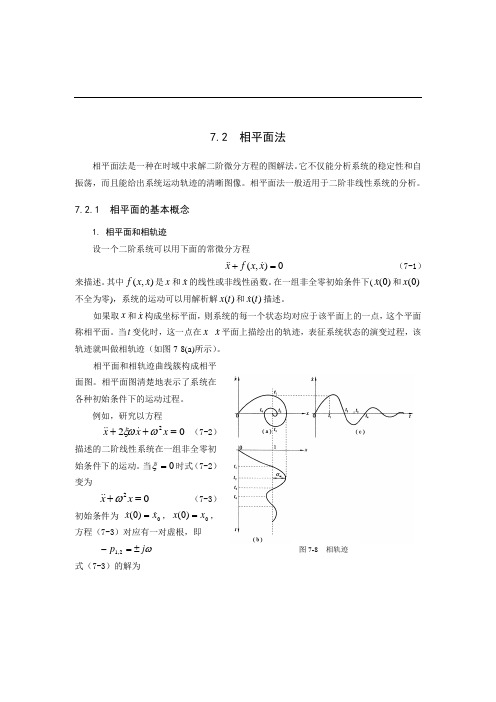
7.2.1 相平面的基本概念1. 相平面和相轨迹设一个二阶系统可以用下面的常微分方程),(=+xxfx(7-1)来描述。
其中),(xxf 是x和x 的线性或非线性函数。
在一组非全零初始条件下()0(x 和)0(x不全为零),系统的运动可以用解析解)(tx和)(tx 描述。
如果取x和x 构成坐标平面,则系统的每一个状态均对应于该平面上的一点,这个平面称相平面。
当t变化时,这一点在x-x 平面上描绘出的轨迹,表征系统状态的演变过程,该轨迹就叫做相轨迹(如图7-8(a)所示)。
相平面和相轨迹曲线簇构成相平面图。
相平面图清楚地表示了系统在各种初始条件下的运动过程。
例如,研究以方程22=++xxxωξω(7-2)描述的二阶线性系统在一组非全零初始条件下的运动。
当0=ξ时式(7-2)变为2=+xxω(7-3)初始条件为)0(xx=,)0(xx=,方程(7-3)对应有一对虚根,即ωjp±=-2,1式(7-3)的解为图7-8 相轨迹)sin(ϕω+=tAx(7-4)式中,2220ωxxA+=,arctanxxωϕ=设x为描述二阶线性系统的一个变量,取x为描述系统的另一状态变量,即)cos(ϕωω+==tAdtdxx (7-5)从式(7-4)、式(7-5)中消去变量t,可得出系统运动过程中两个状态变量的关系为222)(Axx=+ω这是一个椭圆方程。
椭圆的参数A取决于初始条件x和x 。
选取不同的一组初始条件,可得到不同的A,对应相平面上的相轨迹是不同的椭圆,这样便得到一个相轨迹簇。
0=ξ时的相平面图如图7-9所示,表明系统的响应是等幅周期运动。
图中箭头表示时间t增大的方向。
2.相轨迹的性质相平面的上半平面中,0>x ,相迹点沿相轨迹向x轴正方向移动,所以上半部分相轨迹箭头向右;同理,下半相平面0<x ,相轨迹箭头向左。
自动控制原理--系统的相平面分析

xx00
x
x 0.5x 2x 0
s2 0.5s 2 0
s1 1.19, s2 1.69 鞍点
x 系统奇点特性及其相平面图
• •
P2
P1
x
2
2.奇线-极限环
在相平面图上表现为一个孤立的封闭的相轨迹,其他轨 迹都趋向或者离开这个相轨迹,这个相轨迹称之为极限 环。极限环在系统运动状态上表现为自振荡。
即系统的奇点为:
e e 0
e
y
(R,0)
•e
t
a) e
e
R•
(R,0)
•e
t
c)
b)
典型二阶线性系统阶跃输入 相平面图及时域曲线
二、斜坡响应
Ty y Ke
Rs Es
K
sTs 1
Ys
因为 e r y,e r y,e r y
典型二阶线性系统结构图
在斜坡输入作用下 r(t) Vt, r(t) 0,r(t) V
e)
x x
x x
x x
j
0 b)
j
0
d) j
0 f)
典型二阶系统奇点特性及其相平面图
x x
x x
x x
关于奇点的结论: ①线性二阶系统有一个奇点,如果是零输入 系统,奇点就是原点。 ②除奇点外,不同初始点的相轨迹不相交。 ③根据线性系统根的分布,判断奇点类型, 可以确定奇点附近的相轨迹,可以分析系 统的运动状态。 ④对于非线性二阶系统,可能存在多个奇点, 在确定奇点位置后,可以在奇点处对系统 进行线性化,然后确定奇点附近的相轨迹。
此时,
e
e0区域内,Te
e
0 ,e(T
d2e de
dt 2 dt
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
理论分析是探讨系统特征最经济的方法
仿真必须有理论指导.盲目的仿真很可能是误导
非线性控制器的设计以分析为基础,当控制器的 工作不能满足要求时给出改进的导向 没有适用于所有非线性控制系统分析的通用技术
2
1.相平面分析 分析二阶非线性系统的图形方法 在相平面上给出一族系统的运动轨线(不足之处?) 2. Lyapunov方法 直接方法:构造一个类似能量的lyapunov函数,考查其是 否单调衰减(可用于时变的、时不变的、有穷 维的、无穷维的等一切系统) 间接方法:在平衡点附近进行线性化近似 (不足之处?) 3. 描述函数 用线性“等价系统”去逼近非线性系统的非线性成分, 然后用频域法去研究近似系统 可用来分析高阶系统 (不足之处?)
4
本章内容
相图基本概念 相图的构造 线性系统的相平面分析 非线性系统的相平面分析
5
2.1 基本概念
相图 相平面法研究如下形式的二阶自治系统
x1 f1 ( x1 , x2 ) x 2 f 2 ( x1 , x2 )
x1 , x2是系统状态 , f1 , f 2为系统状态的非线性函 数
变量替换,化为 状态空间下表示 为
以x1 x2 为坐标的相平面
相平面法也可用于一阶系统分析:
x 4 x x 3
8
奇异点(平衡点)
结合
x 0
x1 f1 ( x1 , x2 ) x 2 f 2 ( x1 , x2 )
得到
f1 ( x1 , x2 ) 0 f 2 ( x1 , x2 ) 0
14
2
将图2.5b的左半平面和2.5c的右半平面(?)合并, 得闭环控制系统的完整相图
15
2. 等斜率法
系统
x1 f1 ( x1 , x2 ) x 2 f 2 ( x1 , x2 )
dx2 f 2 ( x1 , x2 ) 的斜率由 确定 dx1 f1 ( x1 , x2 ) dx2 f 2 ( x1 , x2 ) dx1 f1 ( x1 , x2 )
因此,等斜率轨线定义为
f 2 ( x1 , x2 ) f1 ( x1 , x2 )
该曲线上 点具有相 同斜率
等斜率法的两个步骤: 1. 得到轨线的切线场 ; 2. 根据切线场的方向得到平面相轨线
16
以质量-弹簧系统为例,用等dx2 x1 轨线的斜率为 dx1 x2
3
第二章 相平面分析
19世纪末由法国数学家Henri Poincare等确立 思想:在二维的相平面上,画出对应于不同初值 的运动轨线,然后研究轨线的定性特性。 优点: ① 图解法,不必求解非线性方程 ② 不局限于小的和光滑的非线性,对强的、“硬的” 非线性同样有效 ③ 一些实际控制系统可以用二阶系统有效逼近
消去时间t,得到轨线方程
x x
2
2
x
2
0
结论:在相图中,不同初值对应的系统特性展露无遗。 系统轨线既不趋于0,也不趋于无穷,因此处于临界稳 定状态。
7
单变量二阶系统: x f ( x, x) 0 x1 x
x2 x
x1 x2 x 2 f ( x1 , x2 )
例:质量-弹簧系统
f ( x1 , x 2 ) x1 而 f ( x1 , x2 ) x1 , - f ( x1 , x2 ) x1
x x 0
因此相图关于 x1 , x2 都对称
10
本章内容
相图基本概念 相图的构造 线性系统的相平面分析 非线性系统的相平面分析
11
2.2 构造相图
现在相图一般由计算机程序生成。但是,快速勾 画相图以及快速检验计算机产生相图的概貌,仍 然十分有用。 构造相轨线的方法有:解析法、等斜线法、三角 法、Lienard方法等
12
1. 解析方法
方法1
:从
x1 f1 ( x1 , x2 ) x 2 f 2 ( x1 , x2 )
中解出时间函数 x1 (t )和x2 (t )
然后从 x1 (t )和x2 (t ) 中消去t。参考质量-弹簧系统
方法2
:直接消去时间变量t,得到
然后从中解出 x1 (t )和x2 (t ) 的关系
例如,对质量-弹簧系统 x x 0
d x x x 0 dx
可写成
2 2
积分后同样得到 x x
x
2
0
13
多数非线性系统难以用解析方法求解。但是对分段线性的 非线性函数,这种方法很有效。
x1 ? x2 ?
线性系统通常只有一个奇异点, 非线性系统有多个孤立的奇异点。
例:系统
x 0 .6 x 3 x x 2 0
结论:该系统两个奇异点;奇异 点处相轨线相交
9
相图的对称性(斜率大小相同,符号相反)
x 2 f ( x1 , x2 )
x1 x2
例:卫星控制系统
控制系统的目的是通 过调节推进器产生的 力矩u来保持卫星天线 的角度为0
卫星的数学模型是 u, 先考虑正力矩U的情况, U 积分得, 当力矩为-U时,
2U c1
2
U , 0 u (t ) U , 0
2U c1
dx2 f ( x1 , x2 ) dx1 x
如果系统方程满足条件 : f ( x1 , x2 ) f ( x1 , x2 ) 关于x1轴对称 f ( x1 , x2 ) - f (- x1 , x2 ) 关于x2轴对称 f ( x1 , x2 ) - f (- x1 , x2 ) 关于原点对称
第一步,等斜率方程为 x1 x2 0 令\alpha取不同的值,可以得到不同的等斜率线 第二步,将切向量场描述的短线段连接起来,得到轨线。
相平面就是以
x1 , x2 为坐标的平面
初值x(0) x0 方程的解x(t ) 当t 时,x(t ) 可看作相平面的一条几何曲线,称为相平面轨线
6
例:质量-弹簧系统的相图
描述质量-弹簧系统的动 态方程:
x x 0
解为
x(t ) x0 cost x(t ) x0 sin t