专题七 非线性最小二乘法
基于非线性最小二乘法的信号处理技术研究
基于非线性最小二乘法的信号处理技术研究一、引言信号处理技术逐渐成为科学技术发展的重要支撑,广泛应用于图像处理、音频处理、雷达信号处理、生物医学信号处理等领域。
而其中非线性最小二乘法作为一种重要的信号处理技术,在现代科学技术中也日益得到重视。
本文旨在探讨基于非线性最小二乘法的信号处理技术,并且深入研究其在不同领域的应用。
二、非线性最小二乘法非线性最小二乘法是利用最小二乘原理对非线性问题进行求解的方法。
它的核心思想是寻找一组参数,使得模型与观测值之间的误差最小。
常见的应用场景包括反演、拟合、匹配以及识别等。
一般的非线性最小二乘问题可以表示为:$$ min \sum_{i=1}^n[f(x_i) - y_i]^2 $$其中,$x$ 为待求解的参数,$y$ 为观测数据,$f$ 则为非线性模型。
对这个问题进行求解,通常需要使用迭代算法。
在一般情况下,非线性最小二乘问题没有解析解,因此我们需要借助数值优化算法求解。
其中,常用的算法包括Gauss-Newton方法、Levenberg-Marquardt方法、拟牛顿法等。
三、基于非线性最小二乘法的信号处理1、图像处理在图像处理中,非线性最小二乘法常被用于图像配准、去噪、分割以及恢复等问题。
例如,在图像去噪方面,非线性最小二乘法被广泛应用于基于全变分正则化的图像去噪算法中。
在这个算法中,我们可以通过最小化全变分正则化项和观测数据的误差项来获得更好的去噪效果。
另外,在图像配准中,非线性最小二乘法也常被应用于相位相关图像配准和形变场估计中。
通过找到相邻两幅图像之间的最小误差,我们可以求解出两张图片之间的形变场,并实现图像配准。
2、音频处理在音频处理中,非线性最小二乘法广泛被应用于音频信号分析、鉴别以及调制等方面。
例如,在声音鉴别中,我们可以通过谱聚类算法使用非线性最小二乘法来实现声音信号的聚类分析。
谱聚类算法能够有效地使用非线性标准完成音频聚类和分组问题,并且可以实现多类型声音的分类识别。
非线性最小二乘法
非线性最小二乘法最小二乘法的一般涵义在科学实验的统计方法研究中,往往会遇到下列类型的问题:设x,y都是被观测的量,且y是x的函数:y=f(x;,…,) (2.1)假设这个函数关系已经由实际问题从理论上具体确定,因而(2.1)可称为理论函数或理论曲线公式,但其中含有n个未知参数,…,。
为了进一步确定这n个参数,我们可以通过实验或观测来得到m组数据:(,(,,…,(,(2.2)根据(2.2)来寻找参数的最佳估计值,…,,即寻求最佳的理论曲线y=f(x;,…,),这就是一般的曲线拟合问题,也可称为观测数据的平滑问题。
在实际问题中我们经常遇到的一种曲线拟合问题是需要从观测数据(2.2)求出y和x的一个经验公式,而在曲线拟合时首先碰到的问题就是函数关系(2.1)的具体确定,然后才能进行参数估计。
对于某些变量x,y之间已经有比较明确物理关系或关系简单的问题给出函数的具体表达式并不是太困难,但往往实际问题中所遇到的却是极为复杂的问题,要建立有效的表达式就有些困难了。
我们所讨论的最小二乘问题都是建立在函数关系已知的基础上。
我们用残差作为拟合标准,此时=-f(;,…,) (i=1,2,…,m)简单记作r=y-f(x;b)这里,r=b=f(x,b)=残差向量r的三种范数记作===残差可以表示拟合的误差,误差越小则拟合的效果越好。
虽然取前两种范数最小,比较理想和直观,但是它们不便于计算,因此在实际应用中是取欧式范数最小,即求出参数b ,使得=min 这就是通常所谓的最小二乘法,几何语言也成为最小二乘拟合。
解非线性方程组的Newton 法12(,,......,)01,2,......,j n f x x x j m =⎧⎨=⎩(1) 设其解为***12(,,......,)n x x x ,在其附近一点00012(,,......,)n x x x 把j f 展成Taylor 展式: 00000001212121(,,...,)(,,...,)()(,,...,)n j n j nk k j n j k k f x x x f x x x x x f x x x R x =∂=+-+∂∑20012,11()()(,,......)1,2,......,2n j l l k k j n l k l k R x x x x f j n x x ξξξ=∂=--=∂∂∑忽略余项j R 得到:000000012121(,,...,)()(,,...,)01,2,...,n j n k k j n k kf x x x x x f x x x j m x =∂+-==∂∑ 这是一组线性方程,它的解111,......,n x x 作为解,系数矩阵式Jacobi 阵 1111222212112(,...,)n n n m m m n f f f x x x f f f x x x J J x x f f f x x x ∂∂∂⎛⎫ ⎪∂∂∂ ⎪ ⎪∂∂∂ ⎪∂∂∂== ⎪ ⎪ ⎪∂∂∂ ⎪ ⎪∂∂∂⎝⎭写成向量形式:12(,,......,)j j j j n x x x x =,则上述线性方程组化为: 000()()()0f x J x x x +-=当m n >时,上述方程为超定的,求其最小二乘解1x10100()()x x J x f x -=-其中1J -理解为广义逆,再迭代得:11()()k k k k x x J x f x +-=-。
非线性最小二乘

非线性最小二乘估计一实验目的1.了解目标定位实验的整个过程。
2.对目标进行非线性最小二乘定位,分析实验结果。
二 实验原理雷达目标定位与跟踪问题本质上是非线性估计问题,最常使用的是极大似然估计算法。
在测量噪声服从高斯分布的前提下,利用最大似然估计法进一步将雷达目标定位问题转化为非线性最小二乘问题。
非线性最小二乘问题一般没有封闭解,通常是利用迭代法求解,且需要预先给定一个迭代的初值。
2.1目标建模目标建模的目的就是估计移动目标的状态轨迹。
几乎所有的机动目标跟踪方法都是基于模型的。
总是假定目标运动及其对它的观测能够用某个已知的数学模型严格表示。
常用的就是下述的状态空间模型 N k v x h z w u x f x kk k k k k k k k ∈⎩⎨⎧+==+)(),,(1 (1)目标运动状态模型描述了目标状态x 和时间的演化过程。
其中,k k k u z x ,,分别是k 时刻目标的状态、观察和控制输入向量;}{},{k k v w 分别是过程噪声序列和两侧噪声序列。
本实验中采用二维匀速(CV )模型,即: ],,,[k k k k k y y xx x =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10001000010001T TF k ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=ΓT T T T k 02/0002/22 ⎥⎦⎤⎢⎣⎡=01000001k H (2) 状态演化方程和测量方程分别为:kk k k k k k k k v x H z w x F x +=Γ+= (3)其中,N k ∈是时间指标,n k x ℜ∈是k 时刻的状态向量,k F 是系统状态转移矩阵,k w 为过程演化噪声,k Γ为噪声矩阵,m k z ℜ∈是k 时刻对系统状态的测量向量,k H 是量测矩阵,k v 是测量噪声。
2.2 非线性最小二乘估计的数学描述假设要从M 个观测量i r 组成的观测向量r 中估计向量x ,当存在加性噪声时,局部传感器量测方程为:M i n x f r i i i ,,2,1,)( =+= (4)其中,)(x f i 为一个非线性函数,经过量测方程扩维,有:n x f r +=)( (5)量测噪声协方差矩阵为N ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=)()()(1x r x r x r M ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=)()()(1x f x f x f M ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=)()(1x n x n n M在高斯假设下,[]⎭⎬⎫⎩⎨⎧---=-)]([)(21exp ||)2(1)|(12/12/x f r N x f r N x r p T N π (6)极大似然估计等价于极小化如下二次形式:[][])()()(1x f r N x f r x Q T--=- (7)由于)(x f 非线性,可通过一阶Taylor 展开对其进行线性化:)()()(00x x G x f x f -+≈ (8)其中Jacobi 矩阵⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=====0001111x x n N x x nx x N x x x f x f x f x f G (9) 所以有:][][)(111Gx r N Gx r x Q T --=- (10)其中001)(Gx x f r r +-= (11)令梯度为0,⎥⎦⎤⎢⎣⎡∂∂∂∂∂∂=∇=n x x x x Q x Q x Q x Q 21ˆ)( 02ˆ2111=-=--r N G xG N G T T (12) 所以,0ˆ111=---r N G xG N G T T (13)即))(()()(ˆ011101111x f r N G G N G x r N G G N G xT T T T -+==------ (14) 2.3 迭代初值的确定在无观测误差的情况下,两条观测线的斜率分别为1α和2α,如图1所示:OyxTX 1X 2a 1a 2图1 无噪声下的观测示意图建立如下的方程组:⎪⎪⎩⎪⎪⎨⎧--=--=222111tan tan x x y y x x y y αα (15)解方程组得到迭代的初值为:⎪⎪⎩⎪⎪⎨⎧-+--=-+--=1222112121120122211210tan tan tan tan tan tan tan tan tan tan tan tan ααααααααααααx x y y y x x y y x (16)三 实验步骤1.首先建立二维匀速运动的模型;2.通过理解最小二乘算法的运算过程,编写最小二乘估计的算法程序; 最小二乘算法的算法流程如图2所示:开始确定初始位置求偏导数构建Jacobi 矩阵估计状态循环是否超出是结束否图2 最小二乘算法的算法流程图3.分析最小二乘算法的效果;4.指出本实验中的遇到的问题。
数学建模 非线性最小二乘问题

1、非线性最小二乘问题用最小二乘法计算:sets:quantity/1..15/: x,y;endsetsmin=@sum(quantity: (a+b* @EXP(c*x)-y)^2);@free(a); @free(b);@free(c);data:x=2,5,7,10,14,19,26,31,34,38,45,52,53,60,65;y=54,50,45,37,35,25,20,16,18,13,8,11,8,4,6;enddata运算结果为:Local optimal solution found.Objective value: 44.78049 Extended solve steps: 5Total solve iterartions: 68Variable Value Reduced CostA 2.430177 0.000000B 57.33209 0.000000C -0.4460383E-01 0.000000由此得到a的值为2.430177,b的值为57.33209,c的值为-0.04460383。
线性回归方程为y=2.430177+57.33209* @EXP(-0.04460383*x)用最小一乘法计算:程序如下:sets:quantity/1..15/: x,y;endsetsmin=@sum(quantity: @ABS(a+b*@EXP(c*x)-y));@free(a); @free(b);@free(c);data:x=2,5,7,10,14,19,26,31,34,38,45,52,53,60,65;y=54,50,45,37,35,25,20,16,18,13,8,11,8,4,6;enddata运算结果为:Linearization components added:Constraints: 60Variables: 60Integers: 15Local optimal solution found.Objective value: 20.80640Extended solver steps: 2Total solver iterations: 643Variable Value Reduced CostA 3.398267 0.000000B 57.11461 0.000000C -0.4752126e-01 0.000000由上可得a的值为3.398267,b的值为57.11461,c的值为-0.04752126。
最小二乘法 线性与非线性拟合

最小二乘法线性与非线性拟合最小二乘法实现数据拟合最小二乘法原理函数插值是差值函数p(x)与被插函数f(x)在节点处函数值相同,即p( )=f( ) (i=0,1,2,3……,n),而曲线拟合函数不要求严格地通过所有数据点( ),也就是说拟合函数在处的偏差=不都严格地等于零。
但是,为了使近似曲线能尽量反应所给数据点的变化趋势,要求| |按某种度量标准最小。
即=为最小。
这种要求误差平方和最小的拟合称为曲线拟合的最小二乘法。
(一)线性最小二乘拟合根据线性最小二乘拟合理论,我们得知关于系数矩阵A的解法为A=R\Y。
例题假设测出了一组,由下面的表格给出,且已知函数原型为y(x)=c1+c2*e^(-3*x)+c3*cos(-2*x)*exp(-4*x)+c4*x^2试用已知数据求出待定系数的值。
在Matlab中输入以下程序x=[0,0.2,0.4,0.7,0.9,0.92,0.99,1.2,1.4,1.48,1.5]';y=[2.88;2.2576;1.9683;1.9258;2.0862;2.109;2.1979;2.5409;2.9627;3.155;3.2052];A=[ones(size(x)) exp(-3*x),cos(-2*x).*exp(-4*x) x.^2];c=A\y;c'运行结果为ans =1.22002.3397 -0.6797 0.8700下面画出由拟合得到的曲线及已知的数据散点图x1=[0:0.01:1.5]';A1=[ones(size(x1)) exp(-3*x1),cos(-2*x1).*exp(-4*x1) x1.^2];y1=A1*c;plot(x1,y1,x,y,'o')事实上,上面给出的数据就是由已知曲线y(x)= 0.8700-0.6797*e^(-3*x)+ 2.3397*cos(-2*x)*exp(-4*x)+ 1.2200*x^2产生的,由上图可见拟合效果较好。
非线性最小二乘法Levenberg-Marquardt-method

Levenberg-Marquardt Method(麦夸尔特法)Levenberg-Marquardt is a popular alternative to the Gauss-Newton method of finding the minimum of afunction that is a sum of squares of nonlinear functions,Let the Jacobian of be denoted , then the Levenberg-Marquardt method searches in thedirection given by the solution to the equationswhere are nonnegative scalars and is the identity matrix. The method has the nice property that, forsome scalar related to , the vector is the solution of the constrained subproblem of minimizingsubject to (Gill et al. 1981, p. 136).The method is used by the command FindMinimum[f, x, x0] when given the Method -> Levenberg Marquardt option.SEE A LSO:Minimum, OptimizationREFERENCES:Bates, D. M. and Watts, D. G. N onlinear Regr ession and Its Applications. New York: Wiley, 1988.Gill, P. R.; Murray, W.; and Wright, M. H. "The Levenberg-Marquardt Method." §4.7.3 in Practical Optim ization. London: Academic Press, pp. 136-137, 1981.Levenberg, K. "A Method for the Solution of Certain Problems in Least Squares." Quart. Appl. Math.2, 164-168, 1944. Marquardt, D. "An Algor ithm for Least-Squares Estimation of Nonlinear Parameters." SIAM J. Appl. Math.11, 431-441, 1963.Levenberg–Marquardt algorithmFrom Wikipedia, the free encyclopediaJump to: navigation, searchIn mathematics and computing, the Levenberg–Marquardt algorithm (LMA)[1] provides a numerical solution to the problem of minimizing a function, generally nonlinear, over a space of parameters of the function. These minimization problems arise especially in least squares curve fitting and nonlinear programming.The LMA interpolates between the Gauss–Newton algorithm (GNA) and the method of gradient descent. The LMA is more robust than the GNA, which means that in many cases it finds a solution even if it starts very far off the final minimum. For well-behaved functions and reasonable starting parameters, the LMA tends to be a bit slower than the GNA. LMA can also be viewed as Gauss–Newton using a trust region approach.The LMA is a very popular curve-fitting algorithm used in many software applications for solving generic curve-fitting problems. However, the LMA finds only a local minimum, not a global minimum.Contents[hide]∙ 1 Caveat Emptor∙ 2 The problem∙ 3 The solutiono 3.1 Choice of damping parameter∙ 4 Example∙ 5 Notes∙ 6 See also∙7 References∙8 External linkso8.1 Descriptionso8.2 Implementations[edit] Caveat EmptorOne important limitation that is very often over-looked is that it only optimises for residual errors in the dependant variable (y). It thereby implicitly assumes that any errors in the independent variable are zero or at least ratio of the two is so small as to be negligible. This is not a defect, it is intentional, but it must be taken into account when deciding whether to use this technique to do a fit. While this may be suitable in context of a controlled experiment there are many situations where this assumption cannot be made. In such situations either non-least squares methods should be used or the least-squares fit should be done in proportion to the relative errors in the two variables, not simply the vertical "y" error. Failing to recognise this can lead to a fit which is significantly incorrect and fundamentally wrong. It will usually underestimate the slope. This may or may not be obvious to the eye.MicroSoft Excel's chart offers a trend fit that has this limitation that is undocumented. Users often fall into this trap assuming the fit is correctly calculated for all situations. OpenOffice spreadsheet copied this feature and presents the same problem.[edit] The problemThe primary application of the Levenberg–Marquardt algorithm is in the least squares curve fitting problem: given a set of m empirical datum pairs of independent and dependent variables, (x i, y i), optimize the parameters β of the model curve f(x,β) so that the sum of the squares of the deviationsbecomes minimal.[edit] The solutionLike other numeric minimization algorithms, the Levenberg–Marquardt algorithm is an iterative procedure. To start a minimization, the user has to provide an initial guess for the parameter vector, β. In many cases, an uninformed standard guess like βT=(1,1,...,1) will work fine;in other cases, the algorithm converges only if the initial guess is already somewhat close to the final solution.In each iteration step, the parameter vector, β, is replaced by a new estimate, β + δ. To determine δ, the functions are approximated by their linearizationswhereis the gradient(row-vector in this case) of f with respect to β.At its minimum, the sum of squares, S(β), the gradient of S with respect to δwill be zero. The above first-order approximation of gives.Or in vector notation,.Taking the derivative with respect to δand setting theresult to zero gives:where is the Jacobian matrix whose i th row equals J i,and where and are vectors with i th componentand y i, respectively. This is a set of linear equations which can be solved for δ.Levenberg's contribution is to replace this equation by a "damped version",where I is the identity matrix, giving as the increment, δ, to the estimated parameter vector, β.The (non-negative) damping factor, λ, isadjusted at each iteration. If reduction of S is rapid, a smaller value can be used, bringing the algorithm closer to the Gauss–Newton algorithm, whereas if an iteration gives insufficientreduction in the residual, λ can be increased, giving a step closer to the gradient descentdirection. Note that the gradient of S withrespect to β equals .Therefore, for large values of λ, the step will be taken approximately in the direction of the gradient. If either the length of the calculated step, δ, or the reduction of sum of squares from the latest parameter vector, β + δ, fall below predefined limits, iteration stops and the last parameter vector, β, is considered to be the solution.Levenberg's algorithm has the disadvantage that if the value of damping factor, λ, is large, inverting J T J + λI is not used at all. Marquardt provided the insight that we can scale eachcomponent of the gradient according to thecurvature so that there is larger movement along the directions where the gradient is smaller. This avoids slow convergence in the direction of small gradient. Therefore, Marquardt replaced theidentity matrix, I, with the diagonal matrixconsisting of the diagonal elements of J T J,resulting in the Levenberg–Marquardt algorithm:.A similar damping factor appears in Tikhonov regularization, which is used to solve linear ill-posed problems, as well as in ridge regression, an estimation technique in statistics.[edit] Choice of damping parameterVarious more-or-less heuristic arguments have been put forward for the best choice for the damping parameter λ. Theoretical arguments exist showing why some of these choices guaranteed local convergence of the algorithm; however these choices can make the global convergence of the algorithm suffer from the undesirable properties of steepest-descent, in particular very slow convergence close to the optimum.The absolute values of any choice depends on how well-scaled the initial problem is. Marquardt recommended starting with a value λ0 and a factor ν>1. Initially setting λ=λ0and computing the residual sum of squares S(β) after one step from the starting point with the damping factor of λ=λ0 and secondly withλ0/ν. If both of these are worse than the initial point then the damping is increased by successive multiplication by νuntil a better point is found with a new damping factor of λ0νk for some k.If use of the damping factor λ/ν results in a reduction in squared residual then this is taken as the new value of λ (and the new optimum location is taken as that obtained with this damping factor) and the process continues; if using λ/ν resulted in a worse residual, but using λresulted in a better residual then λ is left unchanged and the new optimum is taken as the value obtained with λas damping factor.[edit] ExamplePoor FitBetter FitBest FitIn this example we try to fit the function y = a cos(bX) + b sin(aX) using theLevenberg–Marquardt algorithm implemented in GNU Octave as the leasqr function. The 3 graphs Fig 1,2,3 show progressively better fitting for the parameters a=100, b=102 used in the initial curve. Only when the parameters in Fig 3 are chosen closest to the original, are thecurves fitting exactly. This equation is an example of very sensitive initial conditions for the Levenberg–Marquardt algorithm. One reason for this sensitivity is the existenceof multiple minima —the function cos(βx)has minima at parameter value and[edit] Notes1.^ The algorithm was first published byKenneth Levenberg, while working at theFrankford Army Arsenal. It was rediscoveredby Donald Marquardt who worked as astatistician at DuPont and independently byGirard, Wynn and Morrison.[edit] See also∙Trust region[edit] References∙Kenneth Levenberg(1944). "A Method for the Solution of Certain Non-Linear Problems in Least Squares". The Quarterly of Applied Mathematics2: 164–168.∙ A. Girard (1958). Rev. Opt37: 225, 397. ∙ C.G. Wynne (1959). "Lens Designing by Electronic Digital Computer: I". Proc.Phys. Soc. London73 (5): 777.doi:10.1088/0370-1328/73/5/310.∙Jorje J. Moré and Daniel C. Sorensen (1983)."Computing a Trust-Region Step". SIAM J.Sci. Stat. Comput. (4): 553–572.∙ D.D. Morrison (1960). Jet Propulsion Laboratory Seminar proceedings.∙Donald Marquardt (1963). "An Algorithm for Least-Squares Estimation of NonlinearParameters". SIAM Journal on AppliedMathematics11 (2): 431–441.doi:10.1137/0111030.∙Philip E. Gill and Walter Murray (1978)."Algorithms for the solution of thenonlinear least-squares problem". SIAMJournal on Numerical Analysis15 (5):977–992. doi:10.1137/0715063.∙Nocedal, Jorge; Wright, Stephen J. (2006).Numerical Optimization, 2nd Edition.Springer. ISBN0-387-30303-0.[edit] External links[edit] Descriptions∙Detailed description of the algorithm can be found in Numerical Recipes in C, Chapter15.5: Nonlinear models∙ C. T. Kelley, Iterative Methods for Optimization, SIAM Frontiers in AppliedMathematics, no 18, 1999, ISBN0-89871-433-8. Online copy∙History of the algorithm in SIAM news∙ A tutorial by Ananth Ranganathan∙Methods for Non-Linear Least Squares Problems by K. Madsen, H.B. Nielsen, O.Tingleff is a tutorial discussingnon-linear least-squares in general andthe Levenberg-Marquardt method inparticular∙T. Strutz: Data Fitting and Uncertainty (A practical introduction to weighted least squares and beyond). Vieweg+Teubner, ISBN 978-3-8348-1022-9.[edit] Implementations∙Levenberg-Marquardt is a built-in algorithm with Mathematica∙Levenberg-Marquardt is a built-in algorithm with Matlab∙The oldest implementation still in use is lmdif, from MINPACK, in Fortran, in thepublic domain. See also:o lmfit, a translation of lmdif into C/C++ with an easy-to-use wrapper for curvefitting, public domain.o The GNU Scientific Library library hasa C interface to MINPACK.o C/C++ Minpack includes theLevenberg–Marquardt algorithm.o Several high-level languages andmathematical packages have wrappers forthe MINPACK routines, among them:▪Python library scipy, modulescipy.optimize.leastsq,▪IDL, add-on MPFIT.▪R (programming language) has theminpack.lm package.∙levmar is an implementation in C/C++ with support for constraints, distributed under the GNU General Public License.o levmar includes a MEX file interface for MATLABo Perl (PDL), python and Haskellinterfaces to levmar are available: seePDL::Fit::Levmar, PyLevmar andHackageDB levmar.∙sparseLM is a C implementation aimed at minimizing functions with large,arbitrarily sparse Jacobians. Includes a MATLAB MEX interface.∙ALGLIB has implementations of improved LMA in C# / C++ / Delphi / Visual Basic.Improved algorithm takes less time toconverge and can use either Jacobian orexact Hessian.∙NMath has an implementation for the .NET Framework.∙gnuplot uses its own implementation .∙Java programming language implementations:1) Javanumerics, 2) LMA-package (a small,user friendly and well documentedimplementation with examples and support),3) Apache Commons Math∙OOoConv implements the L-M algorithm as an Calc spreadsheet.∙SAS, there are multiple ways to access SAS's implementation of the Levenberg-Marquardt algorithm: it can be accessed via NLPLMCall in PROC IML and it can also be accessed through the LSQ statement in PROC NLP, and the METHOD=MARQUARDT option in PROC NLIN.。
第四章-非线性最小二乘法

(公式4)
非线性最小二乘法公式化简
则F ( x ) 的梯度向量可写为
g ( x) 2 J ( x)
T
f ( x)
(公式5)
其海色(Hesse)矩阵可写为
G ( x ) 2 J ( x ) J ( x ) 2 f i ( x ) f i ( x )
T 2 i 1 m
(公式6)
否则求解线性方程组得到在许多实际问题中当局部解对应的目标函数值接近于0这时如果当迭代点接近较小gaussnewton法可望有较好的效果高斯牛顿法gaussnewton法levenbergmarquardt算法为了克服为奇异时gn算法所遇到的困难levenberg在1944年久提出用方程组公式12来计算修正量其中是一个在迭代过程中调整的参数但它的工作很少受到注意1963年marquardt重新提出后才受到广泛的应用所以被称为levenbergmarquardt算法
x
(k )
(k )
,并计算
F k 1 F k Jk f
T (k )
rk
2
(k )
T
(k )
T
J k J k
T
(k )
④若 rk
0 . 25 ,则置 v k 1 4 v k
;否则,如果 r
k
0 .75
,则置
;否则置 ⑤置 k k 1 ,转②
v k 1 v k / 2
k p
*
非线性最小二乘法的其他算法
• • • • • • 修正阻尼最小二乘法(MDLS方法) Powell混合算法 法方程求解 拟牛顿法 Gill-Murray方法 一般极小化方法和混合方法
2
非线性最小二乘问题的方法
⾮线性最⼩⼆乘问题的⽅法1.简介和定义 (1)2.设计⽅法 (5) 2.1.最陡下降法. (7) 2.2.⽜顿法. (8) 2.3.线搜索 (9) 2.4.信赖域和阻尼⽅法 (11)3.⾮线性最⼩⼆乘问题 (17) 3.1.⾼斯-⽜顿法 (20) 3.2. Levenberg–Marquardt⽅法........................................ .24 3.3.鲍威尔的狗腿法 (29) 3.4.混合⽅法:LM和拟⽜顿 (34) 3.5. L–M⽅法的割线形式 (40) 3.6.狗腿法的⼀个正割版本 (45) 3.7.最后的评论 (47)附录 (50)参考资料 (55)索引 (57)1.引⾔和定义在本⼿册中,我们考虑以下问题 定义1.1. 最⼩⼆乘问题 查找x∗,⼀个局部最⼩化器,⽤于1)范例1.1. 最⼩⼆乘问题的重要来源是数据拟合。
例如,请考虑以下所⽰的数据点(t1,y1),...,(t m,y m)图1.1 数据点{(t i,y i)}(⽤+标记)和模型M(x,t)(⽤实线标记)此外,我们给出了拟合模型,模型取决于参数x = [x1,x2,x3,x4]T。
我们假设存在⼀个x†,因此{εi}是数据坐标上的(测量)误差,假定像“⽩噪声”⼀样。
对于x的任何选择,我们都可以计算残差对于最⼩⼆乘拟合,将参数确定为残差平⽅和的最⼩值x∗。
可以看出这是定义1.1中n = 4形式的问题。
在图1.1中⽤实线显⽰了M(x∗,t)的图。
最⼩⼆乘问题是更常见问题的⼀个特殊变体:给定函数F:IR n→IR,找到参数F,该参数给出该所谓的⽬标函数或成本函数的最⼩值。
定义1.2 全局最⼩化器⼀般⽽⾔,这个问题很难解决,我们仅介绍解决以下简单问题的⽅法:找到F的局部极⼩值,这是⼀个⾃变量⽮量,在某个区域内给出了F 的最⼩值,其⼤⼩由δ给出,其中δ是⼀个⼩的正数。
定义1.3 本地最⼩化器在本介绍的其余部分中,我们将讨论优化中的⼀些基本概念,第2章简要介绍了为⼀般成本函数找到局部最⼩化器的⽅法。
非线性最小二乘拟合 原理

非线性最小二乘拟合原理
非线性最小二乘拟合是一种常用的非线性参数估计方法,广泛应用于数据分析、曲线拟合和模型优化等领域。
其基本原理是通过最小化残差平方和来确定最优参数估计值。
在非线性最小二乘拟合中,假设存在一个非线性函数模型
y=f(x;θ),其中 x 是自变量向量,θ 是待估计的参数向量,y 是因变量向量。
通过拟合实验数据,我们的目标是找到最优的参数估计值θ,使得模型预测值与实际观测值之间的差异最小。
拟合过程可以通过以下步骤进行:
1. 定义非线性函数模型y=f(x;θ)。
2. 构建残差函数r(θ)=y−f(x;θ),其中r(θ) 是模型预测值与实际观测值之间的差异。
3. 定义目标函数对象S(θ)=Σ[r(θ)]^2,即残差平方和。
4. 通过最小化目标函数S(θ),即求解min S(θ),得到最优的参数估计值θ。
5. 求解最小化问题可以使用各种数值优化算法,如牛顿法、Levenberg-Marquardt 算法等。
非线性最小二乘拟合的关键是构建合适的非线性模型和选择合适的优化算法。
构建模型需要考虑数据特点和问题背景,而选
择优化算法需要根据问题的性质和数据规模进行综合考虑。
需要注意的是,非线性最小二乘拟合对初始参数的选择十分敏感,不同的初始参数可能会导致不同的拟合结果。
因此,在实际应用中,常常需通过多次试验和调整初始参数,以获得更好的拟合结果。
总而言之,非线性最小二乘拟合是一种通过最小化残差平方和的方法来估计参数的有效工具。
通过合理的模型构建和优化算法选择,可以对实验数据进行准确的拟合和参数估计。
非线性最小二乘

– 直接对残差平方和展开台劳级数,而不是对其中的原 模型展开;
– 取二阶近似值,而不是取一阶近似值。
⒋应用中的一个困难
• 如何保证迭代所逼近的是总体极小值(即最小值) 而不是局部极小值?
• 一般方法是模拟试验:随机产生初始值→估计→改 变初始值→再估计→反复试验,设定收敛标准(例 如100次连续估计结果相同)→直到收敛。
• 对于一般的回归模型,如以下形式的模型,
• y f (X,β) u
(1)
• OLS一般不能得到其解析解。比如,运用 OLS方法估计模型(1),令S(B)表示残差 平方和,即
•
(2)
n
n
S(β) ui2 [ yi f (Xi ; β)]2
i 1
i 1
• 最小化S(B),即根据一阶条件可以得到
df
( xi , ) d
S( ) n ( yi f ( xi , (0) ) zi ((0) )( (0) )) 2
i 1
n ( yi f (xi , (0) ) zi ((0) )(0) zi ((0) ) )2
• 各种不同的最优化算法的差异主要体现在 三个方面:搜寻的方向、估计量变化的幅 度和迭代停止法则。
• 非线性最小二乘法的思路是,通过泰勒级 数将均值函数展开为线性模型。即,只包 括一阶展开式,高阶展开式都归入误差项。 然后再进行OLS回归,将得到的估计量作 为新的展开点,再对线性部分进行估计。 如此往复,直至收敛。
线性估计
Q e5.526 ( X / P0 )0.534 (P1 / P0 )0.243 ln(Qˆ) 5.52 0.534ln( X / P0 ) 0.275ln(P1 / P0 )
非线性最小二乘数据拟合(高斯-牛顿法)
Aeq=[ ],beq=[ ] x = linprog(f,A,b,Aeq,beq,lb,ub,x0) %设置初值x0 x = linprog(f,A,b,Aeq,beq,lb,ub,x0,options) % options为指定的优化参
• 线性规划问题是目标函数和约束条件均为 线性函数的问题
min f x
x Rn
sub.to: A x 中f、x、b、beq、lb、ub为向量,A、Aeq为矩阵。 其它形式的线性规划问题都可经过适当变换化为此标准形式。
函数 linprog 格式 x = linprog(f,A,b) %求min f ' *x sub.to 线性规划的最优解。 x = linprog(f,A,b,Aeq,beq) %等式约束,若没有不等式约束,则A=[ ],
非线性拟合相关命令
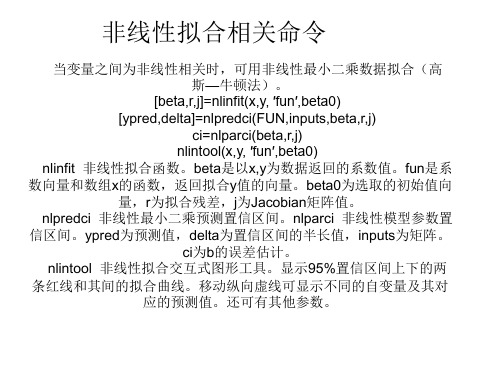
当变量之间为非线性相关时,可用非线性最小二乘数据拟合(高 斯—牛顿法)。
[beta,r,j]=nlinfit(x,y, ′fun′,beta0) [ypred,delta]=nlpredci(FUN,inputs,beta,r,j)
ci=nlparci(beta,r,j) nlintool(x,y, ′fun′,beta0) nlinfit 非线性拟合函数。beta是以x,y为数据返回的系数值。fun是系 数向量和数组x的函数,返回拟合y值的向量。beta0为选取的初始值向 量,r为拟合残差,j为Jacobian矩阵值。 nlpredci 非线性最小二乘预测置信区间。nlparci 非线性模型参数置 信区间。ypred为预测值,delta为置信区间的半长值,inputs为矩阵。 ci为b的误差估计。 nlintool 非线性拟合交互式图形工具。显示95%置信区间上下的两 条红线和其间的拟合曲线。移动纵向虚线可显示不同的自变量及其对 应的预测值。还可有其他参数。
线性及非线性最小二乘问题

m
2 f ( x) A( x)T A( x) ri ( x)2ri ( x) M ( x) S ( x)
i 1
m
i 1
M ( x) A( x) A( x), S ( x) ri ( x) ri ( x)
T 2 i 1
m
A( x) [r1 ( x), r2 ( x),
步1. 给定解的初始估计 x (1) 置k=1; 步2. 如果 x ( k )满足精度要求,停止迭代; T T (k ) 步3. 解方程组 Ak Ak AK rk 得 ; 步4. 置 x
( k 1)
x
(k )
(k )
,k:=k+1后转步2;
2 f ( x) A( x)T A( x) ri ( x)2ri ( x) M ( x) S ( x)
(k )
s
(k )
(k )
;
置 x ( k 1)
x
(k )
ak s ,k:=k+1后转步2.
(k )
§5.4
信赖域方法
信赖域方法是求解最优化问题的另一类有效 方法,其最初的设计思想可追溯至Levenberg 和Marquardt对Gauss-Newton法的修正。
x 离最优解较远时
确定的点
A VS U T V 1 U T ( AT A)1auss- Newton法
考虑非线性最小二乘问题 m 1 1 T 2 min f ( x ) r ( x ) r ( x ) [ r ( x )] , m n, i n xR 2 2 i 1
... ... : QR : : 0 ... mm 0 ... 0 m n
最优化方法第二章_非线性最小二乘
k 0.75, 0.25 k 0.75, k 0.25,
T
从而,求解该问题的牛顿法为
xk 1 xk ( J ( xk )T J ( xk ) s ( xk )) 1 J ( xk )T r ( xk )
上式局部二阶收敛,但计算量大!
二、Gauss-Newton法 Gauss-Newton法 忽略难于计算的高阶项 s ( xk )
1 mk ( x) r ( xk )T r ( xk ) ( J ( x)T r ( xk ))T ( x xk ) 2 1 ( x xk )T ( J ( xk )T J ( xk ))( x xk ) 2
二、Gauss-Newton法 Gauss-Newton法的优缺点 对于零残量问题(即 r ( x* ) 0 ),具有局部二阶收敛速度。
对于小残量问题(即残差较小,或者接近于线性 ),具
有较快的局部收敛速度。 对于线性最小二乘问题,一步达到极小值点。 对于不是很严重的大残量问题,有较慢的收敛速度。
r ( x) r ( xk ) J ( xk )( x xk ) M k ( x)
从而求解线性最小二乘问题
1 min M k ( x) 2
由线性最小二乘理论知
2
xk 1 xk ( J ( xk ) J ( xk )) J ( xk ) r ( xk )
T T
1
xk d k
如果雅克比矩阵不满秩,下降方向取为最速下降方向。
采用带阻尼的G-N法,保证函数值下降(方法总体收敛)。
xk 1 xk k ( J ( xk ) J ( xk )) J ( xk ) r ( xk )
非线性最小二乘问题的求解方法

⾮线性最⼩⼆乘问题的求解⽅法⽬录希望朋友们阅读后能够留下⼀些提⾼的建议呀,哈哈哈!1. ⾮线性最⼩⼆乘问题的定义对于形如(1)的函数,希望寻找⼀个局部最优的x ∗,使得F (x )达到局部极⼩值F (x ∗) 。
F (x )=12m ∑i =1f i (x )2其中,f i :R n ↦R ,i =1,…,m ,即 x ∈R n ,f i (x )∈R 。
局部极⼩值:存在δ>0,对任意满⾜‖x −x ∗‖<δ 的x ,都有F x ∗≤F (x )。
这⾥举三个简单的例⼦:1. x ∈R ,m =1,f 1(x )=x +1,则F (x )=12(x +1)2,局部极⼩值在x ∗=−1处取得。
2. x ∈R ,m =2,f 1(x )=x +1,f 2(x )=exp (3x 2+2x +1),则F (x )=12(x +1)2+exp (3x 2+2x +1),此时就不容易计算出局部最优x ∗的位置了。
3. x ∈R 3,m =1,f 1(x )=x T x ,则F (x )=12(x T x )2事实上,f i 也可以将x 映射到R m 空间中,因为f i (x )2=f i (x )T f i (x )∈R ,最终计算出来的值总是⼀个实数。
对于简单的最⼩⼆乘问题,如1,可以⽤求导取极值的⽅法得到局部极⼩值的位置,然⽽复杂的、⾼维的,如2和3,就只能采取⼀些迭代的策略来求解局部极⼩值了。
注意,是局部极⼩值⽽⾮全局最⼩值!对于凸函数⽽⾔是可以得到全局最⼩值的。
2. 最速下降法假设函数(1)是可导并且光滑的,则可以对函数(1)在x 处进⾏⼆阶泰勒展开为(2)式F (x +Δx )=F (x )+Δx T J +12Δx ⊤H Δx +O ‖Δx ‖3其中 J =∂J (x )∂x 1⋮∂J (x )∂x n ,H =∂2H (x )∂x 1∂x 1⋯∂2H (x )∂x 1∂x n ⋮⋱⋮∂2H (x )∂x n ∂x 1⋯∂2H (x )∂x n ∂x n ,J 和H 分别F 对变量x 的⼀阶导和⼆阶导。
非线性最小二乘曲线拟合的线性化探究
非线性最小二乘曲线拟合的线性化探究摘要:利用非线性最小二乘法的基本思想,总结非线性特征曲线拟合的方法,包括指数曲线拟合法,饱和指数曲线拟合法,双曲线拟合法以及这些方法的应用。
关键字:最小二乘法 非线性 指数 拟合法 matlab在自然科学、社会科学等领域内,人们常常希望掌握某种客观存在的变量之间的函数关系,通过实验、观测和社会调查获得大量的数据后,从这些数据中总结出所需要的函数关系。
这类问题就是曲线拟合问题。
非线性最小二乘曲线拟合法,就是利用非线性最小二乘法的基本思想和一些典型的非线性特征曲线来实现预测的方法。
以下首先介绍线性最小二乘法的基本思想。
然后,尝试使用非线性特征曲线拟合法,包括指数曲线拟合法,饱和指数曲线拟合法以及双曲线拟合法。
通过一些现实生活中我们所遇到的问题,利用这些拟合法作简单预测。
一 、一般的最小二乘法逼近在科学实验的统计方法研究中,往往要从一组实验数据(i i y x ,)(i=0,1,2,…,m )中寻找自变量x 与因变量y 之间的函数关系()x F y =。
由于观测数据往往不准确,因此不要求()x F y =经过所有点(i i y x ,),而只要求在给定点i x 上误差()i i i y x F -=δ(i=0,1,2,…,m )按某种标准最小。
若记()Tm δδδδ,,1,0 =,就是要求向量δ的范数δ最小。
如果用最大范数,计算上困难较大,通常就采用Euclid 范数2δ作为误差度量的标准。
关于最小二乘法的一般的提法是:对于给定的一组数据(i i y x ,)(i=0,1,2,…,m ),要求在函数空间{}n span φφφϕ,,,10 =中找一个函数()x S y *=,使误差平方和()()()∑∑∑=∈=*=-=-==mi i ix s mi i imi iy x S y x S 122222][min][φδδ,(1)这里()()()()x a x a x a x S n n ϕϕϕ+++= 1100 (n <m )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。