基于单片机的多功能数字钟的设计
基于单片机的多功能数字时钟设计
技术平台采用碱性电解液电沉积活性锌粉,选取电解液浓度1.25g/cm3,电流密度150mA/cm2,电解槽温度只需控制在室温,锌粉洗涤后真空干燥,所制得的锌粉比表面积大于0.8m2/g,具有较高的电化学活性,能满足锌银电池生产需要,生产效率也达到批量生产要求。
参考文献:[1]侯新刚,王胜,王玉棉.超细活性锌粉的制备与表征[J].粉末冶金工业,2004,14(1):10-13.[2]李永祥,黄孟阳,任锐.电解法制备树枝状锌粉工艺研究[J].四川有色金属,2011,(3):45-50.[3]胡会利,李宁,程瑾宁,等.电解法制备超细锌粉的工艺研究[J].粉末冶金工业,2007,17(1):24-29.基于单片机的多功能数字时钟设计刘晓萌(安徽职业技术学院铁道学院/合肥铁路工程学校,安徽 合肥 230011)摘 要:常见的数字钟有时间、闹钟等功能。
本文基于单片机、温度传感器、液晶显示屏、时钟芯片等硬件设计了多功能数字时钟,软件部分采用C语言编程实现。
该多功能数字时钟包含万年历、节日、节气、温度信息显示等功能,并且在断电的情况下也能正常工作。
关键词:单片机;多功能数字时钟;C语言编程0 引言人类对于时间的需求从古到今始终存在。
古代有浑天仪、日晷,近代出现了机械时钟。
如今,传统的计时工具,甚至是电子钟都已经满足不了人们多元化的时间需求。
数字时钟具有读取方便、显示直观、功能多样、电路简洁、成本低廉等诸多优点,符合电子仪器仪表的发展趋势,具有广阔的应用空间[1]。
使用数字时钟,用户可以获取精确到秒的时间信息,或是对时钟进行自定义的操作,为现代社会提供了极大的方便[2]。
然而,传统的数字时钟只包含时间显示、闹钟等功能,存在一定的局限性。
本文基于单片机、温度传感器、液晶显示屏、时钟芯片、键盘模块、闹铃模块和电力支持模块等硬件,设计了一款多功能的数字时钟。
1 系统硬件组成数字时钟的硬件由七个模块组成,包括:STC89C52单片机主控芯片、DS1302时钟芯片、DS18B20温度芯片、LCD1602液晶显示模块、闹铃模块、键盘模块和电源。
基于51单片机的多功能电子钟设计

基于51单片机的多功能电子钟设计1. 本文概述随着现代科技的发展,电子时钟已成为日常生活中不可或缺的一部分。
本文旨在介绍一种基于51单片机的多功能电子钟的设计与实现。
51单片机因其结构简单、成本低廉、易于编程等特点,在工业控制和教学实验中得到了广泛应用。
本文将重点阐述如何利用51单片机的这些特性来设计和实现一个具有基本时间显示、闹钟设定、温度显示等功能的电子钟。
本文的结构安排如下:将详细介绍51单片机的基本原理和特点,为后续的设计提供理论基础。
接着,将分析电子钟的功能需求,包括时间显示、闹钟设定、温度显示等,并基于这些需求进行系统设计。
将详细讨论电子钟的硬件设计,包括51单片机的选型、时钟电路、显示电路、温度传感器电路等。
软件设计部分将介绍如何通过编程实现电子钟的各项功能,包括时间管理、闹钟控制、温度读取等。
本文将通过实验验证所设计的电子钟的功能和性能,并对实验结果进行分析讨论。
通过本文的研究,旨在为电子钟的设计提供一种实用、经济、可靠的方法,同时也为51单片机的应用提供一个新的实践案例。
2. 51单片机概述51单片机,作为一种经典的微控制器,因其高性能、低功耗和易编程的特性而被广泛应用于工业控制、智能仪器和家用电器等领域。
它基于Intel 8051微处理器的架构,具备基本的算术逻辑单元(ALU)、程序计数器(PC)、累加器(ACC)和寄存器组等核心部件。
51单片机的核心是其8位CPU,能够处理8位数据和执行相应的指令集。
51单片机的内部结构主要包括中央处理单元(CPU)、存储器、定时器计数器、并行IO口、串行通信口等。
其存储器分为程序存储器(ROM)和数据存储器(RAM)。
程序存储器通常用于存放程序代码,而数据存储器则用于存放运行中的数据和临时变量。
51单片机还包含特殊功能寄存器(SFR),用于控制IO端口、定时器计数器和串行通信等。
51单片机的工作原理基于冯诺伊曼体系结构,即程序指令和数据存储在同一块存储器中,通过总线系统进行传输。
基于单片机的多功能数字钟的设计
西南科技大学本科生毕业论文I 基于单片机的多功能数字钟的设计摘要:本设计论文介绍了用AT89C2051单片机控制的数字钟的硬件结构与软件设计,给出了汇编语言源程序。
此数字钟是一个将“时”、“分”、“秒”显示于人的视觉器官的计时装置。
它的计时周期为12小时,显示满刻度为12时59分59秒99毫秒,另外应有校时功能。
电路由时钟脉冲发生器、时钟计数器、译码驱动电路和数字显示电路以及时间调整电路组成。
用晶体振荡器产生时间标准信号,这里采用石英晶体振荡器。
根据60秒为1分、60分为1小时、24小时为1天的计数周期,分别组成两个60进制(秒、分)、一个12进制(时)的计数器。
构成秒、分、时的计数,实现计时的功能。
显示器件选用LED七段数码管。
在译码显示电路输出的驱动下,显示出清晰、直观的数字符号。
针对数字钟会产生走时误差的现象,在电路中就设计有有校准时间功能的电路。
关键词:单片机;AT89C2051;数字钟;计时摘要时钟,自从它发明的那天起,就成为人类的朋友,但随着时间的推移,科学技术的不断发展,人们对时间计量的精度要求越来越高,应用越来越广。
怎样让时钟更好的为人民服务,怎样让我们的老朋友焕发青春呢?这就要求人们不断设计出新型时钟。
现今,高精度的计时工具大多数都使用了石英晶体振荡器,由于电子钟,石英表,石英钟都采用了石英技术,因此走时精度高,稳定性好,使用方便,不需要经常调校,数字式电子钟用集成电路计时时,译码代替机械式传动,用LED显示器代替显示器代替指针显示进而显示时间,减小了计时误差,这种表具有时,分,秒显示时间的功能,还可以进行时和分的校对,片选的灵活性好。
本设计论文介绍了用AT89C2051单片机控制的数字钟的硬件结构与软件设计,给出了汇编语言源程序。
此数字钟是一个将“时”、“分”、“秒”显示于人的视觉器官的计时装置。
它的计时周期为12小时,显示满刻度为12时59分59秒99毫秒,另外应有校时功能。
电子综合设计-基于单片机多功能数字时钟的设计(附完整程序)
课题:基于51单片机的多功能数字时钟系统设计一、概述、设计思路该设计方案是以MC51单片机为核心,采用LCD液晶屏幕显示系统,辅以闹钟模块,温度采集模块、日期提醒、键盘时间调整预设置等模块,所构建的数字时钟系统,能动态显示实时时钟的时、分、秒,数据显示(误差限制在30每天),对闹铃方式与温度调节模块进行了重点设计实现SB0、SB1、SB2、SB3四个键实现时钟正常显示,调时,及闹钟时间设置。
本系统设计大部分功能有软件来实现,使电路简单明了,系统稳定性也得大大提高。
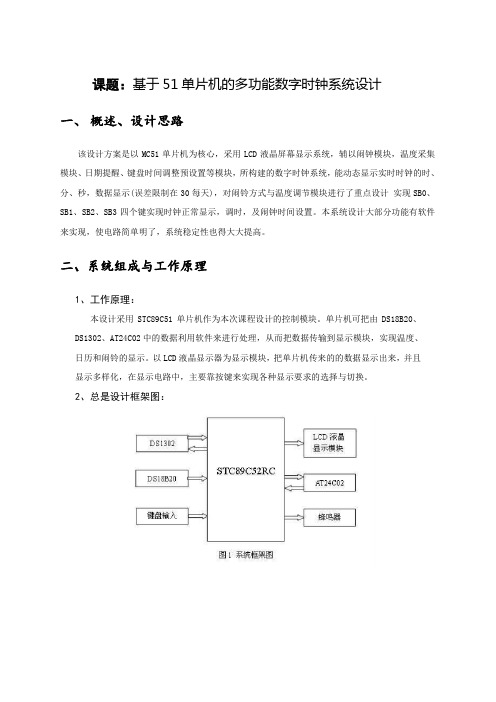
二、系统组成与工作原理1、工作原理:本设计采用STC89C51单片机作为本次课程设计的控制模块。
单片机可把由DS18B20、DS1302、AT24C02中的数据利用软件来进行处理,从而把数据传输到显示模块,实现温度、日历和闹铃的显示。
以LCD液晶显示器为显示模块,把单片机传来的的数据显示出来,并且显示多样化,在显示电路中,主要靠按键来实现各种显示要求的选择与切换。
2、总是设计框架图:图二:系统总体电路图三、单元电路的设计与分析整个电子时钟系统电路可分为六大部分:中央处理单元(CPU)、复位电路部分、显示部分、键盘输入部分、温度采集部分。
1、MCS-51单片机89S51各引脚功能介绍:VCC:89S51 电源正端输入,接+5V。
VSS:电源地端。
XTAL1:单芯片系统时钟的反相放大器输入端。
XTAL2:系统时钟的反相放大器输出端,一般在设计上只要在XTAL1 和XTAL2 上接上一只石英振荡晶体系统就可以动作了,此外可以在两引脚与地之间加入一20PF 的小电容,可以使系统更稳定,避免噪声干扰而死机。
A T89S51RESET:89S51的重置引脚,高电平动作,当要对晶片重置时,只要对此引脚电平提升至高电平并保持两个机器周期以上的时间,AT89S51便能完成系统重置的各项动作,使得内部特殊功能寄存器之内容均被设成已知状态,并且至地址0000H处开始读入程序代码而执行程序。
单片机多功能电子数字钟课程设计报告
多功能电子数字钟设计数字钟在日常生活中最常见, 应用也最广泛。
本文主要就是设计一款数字钟, 以89C52单片机为核心, 配备液晶显示模块、时钟芯片、等功能模块。
数字钟采用24小时制方式显示时间, 定时信息以及年月日显示等功能。
文章的核心主要从硬件设计和软件编程两个大的方面。
硬件电路设计主要包括中央处理单元电路、时钟电路、人机接口电路、信号处理电路、执行电路等几部分组成。
软件用C语言来实现, 主要包括主程序、键盘扫描子程序、时间设置子程序等软件模块。
关键词单片机液晶显示器模块数字钟一硬件电路设计及描述;1.MCS-51单片机单片机是在一块硅片上集成了各种部件的微型计算机。
这些部件包括中央处理器CPU、数据存储器RAM、程序存储器ROM、定时器/计数器和多种I/O接口电路。
8051单片机的结构特点有以下几点: 8位CPU;片内振荡器及时钟电路; 32根I/O线;外部存储器ROM和RAM;寻址范围各64KB;两个16位的定时器/计数器; 5个中断源, 2个中断优先级;全双工串行口。
定时器/计数器8051内部有两个16位可编程定时器/计数器, 记为T0和T1。
16位是指他们都是由16个触发器构成, 故最大计数模值为2 -1。
可编程是指他们的工作方式由指令来设定, 或者当计数器来用, 或者当定时起来用, 并且计数(定时)的范围也可以由指令来设置。
这种控制功能是通过定时器方式控制寄存器TMOD来完成的。
在定时工作时, 时钟由单片机内部提供, 即系统时钟经过12分频后作为定时器的时钟。
技术工作时, 时钟脉冲由TO和T1输入。
中断系统8051的中断系统允许接受五个独立的中断源, 即两个外部中断申请, 两个定时器/计数器中断以及一个串行口中断。
外部中断申请通过INTO和INT1(即P3.2和P3.3)输入, 输入方式可以使电平触发(低电平有效), 也可以使边沿触发(下降沿有效)。
2.8051的芯片引脚如图1-2所示VCC: 供电电压。
基于单片机的多功能数字时钟设计.doc
《测控系统原理与设计》课程设计报告班级测控1082班学号 1081203204指导教师庄立运鲁庆淮阴工学院电子与电气工程学院2011年12月一显示模块选择方案方案一:采用LED数码管动态扫描,LED数码管价格适中,对于显示数字合适,与液晶相比,耗电及体积大与液晶相比,耗电及体积大,所以也不用此种作为显示。
方案二:采用LCD液晶显示屏,液晶显示屏的显示功能强大,可显示大量文字,图形,显示多样,清晰可见,省了很多麻烦,所以在此设计中采用LCD液晶显示屏。
1电路设计最终方案决定综上各方案所述,对本次设计方案选定:采用AT89S52作为主控制系统;DS1302提供时钟;LCD液晶显示屏作为显示。
电路设计框图如下所示图1 系统原理图2、 AT89S52单片机介绍AT89S52 具有以下标准功能:8k 字节 Flash,256 字节 RAM,32 位 I/O 口线,看门狗定时器,2 个数据指针,三个 16 位定时器/计数器,一个 6 向量 2 级中断结构,全双工串行口,片内晶振及时钟电路。
另外,AT89S52 可降至 0Hz 静态逻辑操作,支持 2 种软件可选择节电模式。
空闲模式下,CPU停止工作,允许 RAM、定时器/计数器、串口、中断继续工作。
掉电保护方式下,RAM 内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。
图 2 单片机引脚图VCC : 电源 GND: 地P0 口:P0 口是一个 8 位漏极开路的双向 I/O 口。
作为输出口,每位能驱动 8 个 TTL 逻辑电平。
对 P0 端口写“1”时,引脚用作高阻抗输入。
当访问外部程序和数据存储器时,P0 口也被作为低 8 位地址/数据复用。
在这种模式下,P0 具有内部上拉电阻。
在 flash 编程时,P0 口也用来接收指令字节;在程序校验时,输出指令字节。
程序校时,需要外部上拉电阻。
P1 口:P1 口是一个具有内部上拉电阻的 8 位双向 I/O 口,p1 输出缓冲器能驱动 4 个TTL 逻辑电平。
基于单片机的多功能数字钟的设计
一、概述现代社会,时间被视为人们生活的重要组成部分。
而数字钟作为时间的一种展现形式,已经成为人们生活中不可或缺的一部分。
基于单片机的多功能数字钟设计,将为人们提供更加准确、便捷、多功能的时间展现方式,满足人们对时间的精准要求,同时也为人们的生活带来更多便利。
二、设计目标1. 实现精准的时间显示功能,包括时、分、秒的显示;2. 实现对日期的显示,包括年、月、日的显示;3. 实现多种报时功能,如定时报时、闹钟报时等;4. 实现多种显示效果,如渐变显示、闪烁显示等;5. 实现对时间的调整功能,包括校时、调整日期等;6. 实现对亮度的调节功能,适应不同环境下的使用需求。
三、设计思路1. 硬件设计1.1 硬件采用单片机作为核心控制器,通过外部晶振提供时钟信号;1.2 采用数码管作为显示设备,通过单片机控制数码管进行时间、日期的显示;1.3 通过按钮、旋钮等输入设备,实现时间调节、报时设置等操作;1.4 通过EEPROM等存储设备,实现时间、设置的存储和读取功能;1.5 通过光敏电阻等光敏传感器,实现对环境光强的检测,调节数码管显示亮度。
2. 软件设计2.1 设计合理的时钟系统,确保时间的准确显示;2.2 设计报时功能模块,实现定时报时、闹钟报时等功能;2.3 设计显示控制模块,实现数字、日期的显示效果控制;2.4 设计操作响应模块,实现对按钮、旋钮等输入设备的操作响应;2.5 设计存储管理模块,实现时间、设置数据的存储和读取功能;2.6 设计光敏控制模块,实现对数码管显示亮度的实时调节。
四、实现方法1. 硬件设计1.1 选择合适的单片机作为核心控制器,根据需要进行外围电路的设计;1.2 选择合适的数码管作为显示设备,设计驱动电路以及显示控制电路;1.3 选择合适的按钮、旋钮等输入设备,设计输入电路以及操作响应电路;1.4 选择合适的EEPROM芯片,设计存储管理电路实现数据的存储和读取;1.5 选择合适的光敏电阻或光敏二极管,设计光敏控制电路实现显示亮度的调节。
电子综合设计-基于单片机多功能数字时钟的设计

电子综合设计-基于单片机多功能数字时钟的设计下面是一个基于单片机的多功能数字时钟的完整程序示例:```c#include <reg51.h>sbit LED = P2^0; // 数码管选择位sbit DIO = P2^1; // 数码管数据输入sbit CLK = P2^2; // 数码管时钟unsigned char code duanma[16] =0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x67,0x77,0x7c,0x39,0x5e,0x79,0x71};//数码管段码unsigned char code weima[8] =0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//数码管位码unsigned int count = 0; // 计数//延时函数void delay(unsigned int n)unsigned int i, j;for (i = 0; i < n; i++)for (j = 0; j < 110; j++);}//数码管显示函数void display(unsigned char *nums) unsigned char i;for (i = 0; i < 8; i++) { // 逐位显示DIO = nums[i]; // 将段码赋值给DIO CLK=1;//时钟上升沿CLK=0;//时钟下降沿LED = weima[i]; // 选择位码delay(1); // 延时1msLED = 0xff; // 关闭显示}//复位时钟void resecount = 0;display(duanma);void maiwhile (1)display(duanma); // 显示数码管初始状态reset(; // 复位时钟while (1)reset(;}if (P1 == 0x0f) { // 检测P1口的按键状态delay(20); // 延时消抖if (P1 == 0x0f)delay(20); // 再次延时消抖if (P1 == 0x0f)count++; // 计数加一display(duanma); // 显示计数结果}}}}}```。
基于单片机设计的多功能数字钟设计报告

题目:多功能数字钟一,设计目的1培养大学生动手能力,大体了解电路设计;2掌握电子设计初步知识;3培养团队合作能力;4掌握各芯片的逻辑功能及使用方法.5了解面板结构及其接线方法.6了解数字钟的组成及工作原理.7熟悉数字钟的设计与制作.8初步了解单片机的使用与编程.二,设计要求1.设计指标时间为24小时制;显示小时与分钟; (如下图);有校时功能,可以分别对小时及分钟进行单独校时;具有设置闹铃的功能,并且能控制闹铃的开关;具备闹铃就绪灯(闹铃调整好后,就绪灯亮),且具有蜂鸣功能(到所调闹铃响时间,蜂鸣器发出声音);电源为220V供电.,具有环境温度测量、电网电压、电网频率显示等功能;报警模块由报警蜂鸣器和带音乐芯片的扬声器等可实现闹铃控制和电网电压的过压、欠压报警功能。
2.设计要求画出电路原理图(或仿真电路图);元器件及参数选择;应用计算机完成电路仿真与调试;完成PCB文件生成与打印输出.3.制作要求应用提供元件,自行进行电路装配和调试,并能发现问题和解决问题.4.编写设计报告写出电路设计与整体制作的全过程,附上有关资料和图纸和心得体会.三,基本仪器清单20MHz普通示波器(双通道,外触发输入,有X轴输入,可选带Z轴输入)60MHz双通道数字示波器低频信号发生器(1Hz~1MHz)高频信号发生器(1MHz~40MHz)标准声音源声级校准器函数发生器低频毫伏表高频毫伏表普通频率计失真度测试仪直流稳压电源2米卷尺单相自耦调压器(>200W)单片机开发系统及EDA开发系统五位半数字万用表(电压表)四位半数字万用表四,主要元器件清单单片机最小系统板(仅含单片机芯片、键盘与显示装置、存储器、A/D、D/A)A/D、D/A转换器1MHz采样频率的8位A/D转换器运算放大器、电压比较器可编程逻辑器件及其下载板显示器件小型继电器康铜、锰铜电阻丝漆包线(直径不大于1mm)光电传感器温度传感器声音传感器扬声器DC/DC转换器设计方案我们设计的系统电路由实时时钟模块、环境温度检测模块、电网检测模块、报警模块等部分组成。
基于单片机控制的多功能数字时钟设计
编号 XXXXXXX毕业论文( 2012 届本科)题目:基于单片机控制的多功能数字时钟设计学院:物理与机电学院专业:电气工程及其自动化作者姓名: XXXXXX指导教师: XXXX 职称: XXX完成日期: 2012 年 5 月 16 日二○一二年五月目录摘要: (1)Abstract: (2)第一章绪论 (3)1.1 多功能时钟研究背景 (3)1.2 多功能时钟国内外发展现状 (4)1.3 单片机简介 (4)1.3.1 单片机的发展 (4)1.3.2 单片机的分类 (5)1.4 本文的主要内容及意义 (6)第二章多功能数字时钟系统方案论证 (7)2.1 显示模块选择方案 (7)2.2数字时钟模块选择方案 (7)2.3温度采集模块选择方案 (8)第三章多功能数字时钟系统总体设计 (9)3.1 多功能数字时钟系统的组成 (9)3.2 多功能时钟系统的控制要求 (10)3.2.1 时间与日历显示 (10)3.2.2 温度检测及调整 (10)3.2.3时间手动设置 (10)3.2.4 闹铃设置 (10)第四章多功能数字时钟硬件设计 (11)4.1 系统硬件总图构成及原理 (11)4.2 AT89S52介绍 (11)4.3 时钟模块 (12)4.4 温度测量模块 (13)4.4.1 DS18B20芯片介绍 (13)4.4.2 DS18B20的工作原理 (14)4.4.3 DS18B20工作过程 (14)4.5 LCD液晶显示模块 (15)4.6 晶振电路 (16)4.6.1 晶振电路的原理 (16)4.6.2 晶振电路的作用 (17)4.6.3 晶振电路图 (17)4.7 复位电路 (18)4.7.1 复位电路的原理 (18)4.7.2 复位电路复位方式 (18)4.7.3 复位电路图 (19)4.8 本章小结 (19)第五章多功能数字时钟系统软件设计 (20)5.1 系统总体设计 (20)5.2 系统主要模块流程图 (20)5.2.1 温度测量流程图 (20)5.2.2 时间与闹铃流程图 (21)第六章系统调试与仿真 (22)6.1 Keil μVision2软件平台 (22)6.1.1 编写程序代码 (22)6.1.2 按照系统硬件连线图连接好系统并调试 (22)6.2 键功能介绍 (23)6.3 Protues仿真 (23)总结 (26)参考文献 (27)附录A 源程序代码....................................... 错误!未定义书签。
基于单片机的多功能数字钟设计
基于单片机的多功能数字钟设计引言自古以来时间对于人们而言就显得十分重要,在钟表出现之前,人们已采用各种各样的方法来获取尽量精确的时间。
早期的表功能较为单一,只能看时间不能看日期,也不能调整时间,更是不具备闹铃功能。
随着科技发展,电子技术也去的突飞猛进的进步。
针对钟表这一问题,电子产业部为此研制开发了多功能电子数字钟。
数字中具有显示年、月、日、时、分、秒及整点报时、闹铃功能。
而且秒、分、时、日、月、年可自动关联进位,秒具备清零功能,分、时、日、月、年可自动修改、手动设置校正等。
与机械式时钟相比具有更高的准确性和直观性,且无机械装置,具有更长的使用寿命,已得到广泛的使用。
数字钟的设计方法有许多种,例如,可用中小规模集成电路组成电子钟;也可以利用专用的电子钟芯片配以显示电路及其所需要的外围电路组成电子钟;还可以利用单片机来实现电子钟等等。
这些方法都各有各的特点,其中利用单片机实现的电子钟具有编程灵活,而且便于功能的扩展。
这是由于近年来随着计算机在社会领域的渗透和大规模集成电路的发展,单片机的应用正在不断地走向深入,由于它具有功能强,体积小,功耗低,价格便宜,工作可靠,使用方便等特点,因此特别适合于与控制有关的系统。
单片机越来越广泛地应用于自动控制,智能化仪器,仪表,数据采集,军工产品以及家用电器等各个领域,单片机往往是作为一个核心主控部件来使用,在根据具体硬件结构,以及针对具体应用对象特点及具体设计要求的软件相结合,以作完善,实现设计功能。
智能数字钟在日常生活中带来很多好处。
其结构较简单,因而便于操作使用。
智能数字钟对大众而言是一个很好的选择。
它具有高度的智能化和集成化,是现代人们办公、生活、学习的好帮手,具有广阔的市场前景。
其整点报时、闹铃音乐播放的功能也深受任人亲睐。
如今智能数字钟已越来越受社会各界人士的欢迎。
本次做的数字钟是以单片机(AT89S51)为核心,结合相关的元器件,再配以相应的软件,达到制作简易多功能数字钟的目的。
基于51单片机设计的多功能数字时钟毕业设计

基于51单片机多功能数字时钟1系统设计1.1设计要求设计制作一个24小时制多功能数字钟。
1.1.1主要性能指标1、数字显示年、月、周、日、时、分、秒。
1.1.2创意部分要求准确的进行年、月、周、日、时、分、秒的转换,切换两种显示模式。
1.2总体设计方案1.2.1概述及设计思路该设计方案是以MC51单片机为核心,采用LCD液晶屏幕显示系统,温度采集模块、日期提醒、键盘时间调整预设置等模块,所构建的数字时钟系统,能动态显示实时时钟的时、分、秒,数据显示(误差限制在30每天)。
1.2.2方案论证(1)时钟模块【方案一】采用单片机内置定时/计数器。
它的处理过程主要是先设定单片机内部定时/计数器的工作方式,对机器周期计数确定基准时间,然后用另外一个定时器软件计数的方法对基准时间形成秒,秒计60次形成分,分计60次形成小时。
依此类推,获取日期也是采用相同的方法。
该方案在具体实现过程中,计时存在较大的误差。
如果晶振受到其他外界信号干扰,或者基准时间计算不准确,都会导致时间显示错误。
【方案二】采用555多谐振荡器。
由555定时器组成一个多谐振荡器,产生周期为100HZ的脉冲,然后经过两个74LS160组成的分频器得到1HZ的秒脉冲。
多谐振荡器的稳定度及频率的准确度决定了数字钟计时的准确程度,通常选用成品晶振构成振荡器电路。
计时精度取决于振荡器的频率,振荡器频率越高计时精度越高。
【方案三】采用DS1302时钟芯片。
DS1302是一种高性能、超低功耗的实时时钟芯片,附加31字节静态RAM,可以通过串行接口与单片机进行通信。
实时时钟提供秒、分、时、日、星期、月、年的信息,每个月的天数和闰年的天数可自动调整,时钟操作可通过AM/PM标志位决定采用24或12小时时间格式。
芯片内部集成备用电源,当外围电路电路有电源供应的时候,备用电源充电储能。
当外围电路掉电时,DS1302芯片工作在休眠状态,以备用电源供电。
当外围电路再次供电,即可唤醒休眠进入正常工作状态,显示时间无任何异常。
基于单片机的多功能数字钟设计报告毕业设计(论文)

目录1..............设计整体思路2.............基本原理3.............单元电路设计及单元电路4..............安装调试步骤5..............故障分析与电路改进6..............总结与体会7..............参考文献8..............附录(元器件清单及总电路图)一.设计的整体思路:1.课程设计要求:要用时序逻辑电路设计出一个多功能可调的数字钟,这个数字钟要可调,能显示时分秒,并且要能准确的显示。
2.设计的目的:1 掌握集成电路的引脚安排2 掌握各芯片的逻辑功能及使用方法3 理解数字钟的组成和工作原理4 熟悉数字钟的设计与制作要求:时间以24小时为一个计时周期显示时分秒有校时功能,可以分别对时分进行校时计数器有整点报时功能须有晶体振荡器提供表针时间基准信号画出电路原理图元器件及参数选择电路仿真及调试自行装配和调试,并能发现问题和解决问题编写设计报告二.基本原理及其框图1.主电路是由一个4060芯片,六个74161四位同步二进制计数器和六个CD4511七段显示译码器构成。
其中4060是用来产生始终脉冲信号,74161是用来计数的工作时,每秒一次的方波作为“秒”脉冲信号,因每分钟有60秒,所以“秒”计数器为六十进制计数器,“分”的计数器亦同,而“时”采用二十四进制计数器。
当“秒”计数器满60时,输出秒进位脉冲,送“分”计数器;当“分”计数器满60时,输出“分”进位脉冲,送“时”计数器计数;当“时”计数器满24小时候,“时”“分”“秒”计数器同时自动复零。
每个计数器输出均要经过译码器,显示器显示时钟的“时”“分”“秒”。
三.单元电路设计及单元电路1.如图所示:多谐振荡器该电路由一个4060,一个晶振和一个10M电阻两个22pf电容组成.如图所示2.译码显示电路如图所示:该电路由一个4511BD芯片与共阴极数码管构成图3——1该电路时有两个74LS161和一个74LS04与门,两个数码管和两个的CD4511译码器构成,他们构成一个六十进制计数器,是用来显示秒。
基于51单片机设计的多功能数字时钟
基于51单片机多功能数字时钟姓名:刘波学号:1系统设计1.1设计要求设计制作一个24小时制多功能数字钟。
1.1.1主要性能指标1、数字显示年、月、周、日、时、分、秒。
1.1.2创意部分要求准确的进行年、月、周、日、时、分、秒的转换,切换两种显示模式。
1.2总体设计方案1.2.1概述及设计思路该设计方案是以MC51单片机为核心,采用LCD液晶屏幕显示系统,温度采集模块、日期提醒、键盘时间调整预设置等模块,所构建的数字时钟系统,能动态显示实时时钟的时、分、秒,数据显示(误差限制在30每天)。
1.2.2方案论证(1)时钟模块【方案一】采用单片机内置定时/计数器。
它的处理过程主要是先设定单片机内部定时/计数器的工作方式,对机器周期计数确定基准时间,然后用另外一个定时器软件计数的方法对基准时间形成秒,秒计60次形成分,分计60次形成小时。
依此类推,获取日期也是采用相同的方法。
该方案在具体实现过程中,计时存在较大的误差。
如果晶振受到其他外界信号干扰,或者基准时间计算不准确,都会导致时间显示错误。
【方案二】采用555多谐振荡器。
由555定时器组成一个多谐振荡器,产生周期为100HZ的脉冲,然后经过两个74LS160组成的分频器得到1HZ的秒脉冲。
多谐振荡器的稳定度及频率的准确度决定了数字钟计时的准确程度,通常选用成品晶振构成振荡器电路。
计时精度取决于振荡器的频率,振荡器频率越高计时精度越高。
【方案三】采用DS1302时钟芯片。
DS1302是一种高性能、超低功耗的实时时钟芯片,附加31字节静态RAM,可以通过串行接口与单片机进行通信。
实时时钟提供秒、分、时、日、星期、月、年的信息,每个月的天数和闰年的天数可自动调整,时钟操作可通过AM/PM标志位决定采用24或12小时时间格式。
芯片内部集成备用电源,当外围电路电路有电源供应的时候,备用电源充电储能。
当外围电路掉电时,DS1302芯片工作在休眠状态,以备用电源供电。
基于单片机的多功能数字时钟的设计
摘要近年来随着计算机在社会领域的渗透和大规模集成电路的发展,单片机的应用正在不断地走向深入,由于它具有功能强,体积小,功耗低,价格便宜,工作可靠,使用方便等特点,因此特别适合于与控制有关的系统,越来越广泛地应用于自动控制,智能化仪器,仪表,数据采集,军工产品以及家用电器等各个领域,单片机往往是作为一个核心部件来使用,在根据具体硬件结构,以及针对具体应用对象特点的软件结合,以作完善。
本次做的数字钟是以单片机为核心,它具有时,分,秒显示的功能,并且时,分,秒还可以调整。
此次设计电子数字钟是为了了解电子数字钟的原理,从而学会制作电子数字钟。
而且通过电子数字钟的制作进一步的了解各种在制作中用到的中小规模集成电路的作用及实用方法。
通过它可以进一步学习与掌握单片机原理与使用方法。
关键词单片机控制显示调时目录第一章基于单片机的多功能数字时钟的构成与工作原理第二章数字时钟的系统硬件、软件电路的设计1、振荡电路的设计(1)、振荡器(2)、分频器2、计数电路的设计3、校时电路的设计(1)、电路的电路图(2)、电路工作原理(3)、对电路中所用的主要元件及功能介绍4、译码与显示电路的设计第三章数字时钟扩展功能的设计1、定时控制电路的设计(1)、设计电路(2)、电路的工作原理第四章数字时钟的组装与调试基于单片机的多功能数字时钟的设计第一章基于单片机的多功能秒表的构成与工作原理目前,单片机正朝着高性能和多品种方向发展趋势将是进一步向着CMOS化、低功耗、小体积、大容量、高性能、低价格和外围电路内装化等几个方面发展。
下面是单片机的主要发展趋势。
单片机应用的重要意义还在于,它从根本上改变了传统的控制系统设计思想和设计方法。
从前必须由模拟电路或数字电路实现的大部分功能,现在已能用单片机通过软件方法来实现了。
这种软件代替硬件的控制技术也称为微控制技术,是传统控制技术的一次革命。
单片机模块中最常见的是数字钟,数字钟是一种用数字电路技术实现时、分、秒计时的装置,与机械式时钟相比具有更高的准确性和直观性,且无机械装置,具有更更长的使用寿命,因此得到了广泛的使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的多功能数字钟的设计摘要:本设计论文介绍了用AT89C2051单片机控制的数字钟的硬件结构与软件设计,给出了汇编语言源程序。
此数字钟是一个将“时”、“分”、“秒”显示于人的视觉器官的计时装置。
它的计时周期为12小时,显示满刻度为12时59分59秒99毫秒,另外应有校时功能。
电路由时钟脉冲发生器、时钟计数器、译码驱动电路和数字显示电路以及时间调整电路组成。
用晶体振荡器产生时间标准信号,这里采用石英晶体振荡器。
根据60秒为1分、60分为1小时、24小时为1天的计数周期,分别组成两个60进制(秒、分)、一个12进制(时)的计数器。
构成秒、分、时的计数,实现计时的功能。
显示器件选用LED七段数码管。
在译码显示电路输出的驱动下,显示出清晰、直观的数字符号。
针对数字钟会产生走时误差的现象,在电路中就设计有有校准时间功能的电路。
关键词:单片机;AT89C2051;数字钟;计时Based on SCM multi-purpose digital clock designAbstract:The paper mainly presents the hardware and software design of the digital clock using AT89C2051. The source program using assemble Language is given. This digital clock is a time-device, which can display "hour", "minute", "second". Its time period is 12 hours and the full scale of the display is 12 hours, 59 minutes, 59 seconds and 99 milliseconds and it has the function of time adjustment. The circuit consists of the clock pulse generator, the clock counter, decoding drive circuit, digital display circuit and the time adjustment circuit. It generates time standard signal using crystal oscillator, here is the quartz crystal oscillator. Because 60 seconds is 1 minute, 60 minutes is 1 hour and 24 hours is 1 day, we uses two counters of 60 parts and a counter of 12 part separately to constitute the count of percentage of second, second, minute, and hour. So it can realize time function. Display component selects seven-segment numerical tube LED. Driven by decoding output circuit, it can display showing clear and intuitive figures. Due to walking error of digital clock, we design time calibration circuit in the system.Key words:Single-chip microcomputer; AT89C2051; Digital clock; Time目录第1章绪论 (1)1.1 前言 (1)1.2 设计的目的及意义 (1)第2章数字钟的功能实现与设计方案 (2)2.1 数字钟的功能及设计要求 (2)2.2数字钟的实现形式 (2)2.3 方案的确定 (3)2.3.1 微处理器 (3)2.3.2 显示电路 (3)2.3.3 按键电路 (4)第3章数字钟的硬件系统设计 (5)3.1数字时钟的硬件系统框架 (5)3.2 数字时钟的主机电路设计 (5)3.2.1系统控制芯片CPU(AT89C2051)的选择 (5)3.2.2系统时钟电路设计 (10)3.2.3 系统复位电路设计 (12)3.2.4 按键与按钮电路设计 (13)3.2.5闹铃声光指示电路设计 (13)3.2.6 数字钟的显示电路设计 (13)3.3校时电路设计 (17)3.3.1校时原理 (18)3.3.2 国家授时中心 (18)3.3.3窗口比较器 (19)3.3.4 校时电路电路图 (20)3.4 电源设计 (20)第4章程序设计 (24)4.1 主控模块设计 (24)4.2基本现实模块设计 (25)4.3 当前编辑位闪烁功能的实现 (26)4.4时间设定模块设计 (26)4.5脉冲发生器原理与走时处理 (27)4.6 闹铃功能的实现 (28)第5章系统的调试及结果 (30)5.1 系统调试环境 (30)5.2 软件调试 (30)5.3硬件调试 (30)5.4调试结果 (30)结论 (31)致谢 (32)参考文献 (33)附录1:完整的汇编语言源程序 (34)附录2:系统设计原理图 (57)附录3:系统设计PCB图 (59)附录4:实物照片 (60)西南科技大学本科生毕业论文第1章绪论1.1前言计算机尤其是以微细加工技术支持的微型计算机技术飞速发展,其应用渗透到了各行各业。
以单片机、嵌入式处理器、数字信号处理器(DSP)为核心的计算机系统,以其软硬件可裁剪、高度的实时性、高度的可靠性、功能齐全、低功耗、适应面广等诸多优点而得到极为广泛的应用。
目前计算机硬件技术向巨型化、微型化和单片机化三个方向告诉发展[1]。
自1975年美国德州仪器公司(Texas Instruments)第一块微型计算机芯片TMS-1000问世以来,在短短的20年间,单片机技术已发展成为计算机领域一个非常有前途的分之,它有自己的技术特征、规范和应用领域。
单片机是自动控制系统的核心部件,主要用于工业控制、智能化仪器仪表、家用电器中。
它具有体积小、性能突出可靠性高(某些方面的性能指标大大优于通用微机中央处理器)、价格低廉等一系列优点,应用领域不断扩大,除了工业控制、智能化仪表、通信、家用电器外,在智能化高档电子玩具产品中也大量采用单片机芯片作为核心控制部件,已经渗入到人们工作和生活的各个角落,有力地推动了各行业的技术改造和产品的更新换代,前景广阔。
数字钟具备单片机最小系统的基本组成,对于我们了解单片机有很大的帮助[2]。
1.2 设计的目的及意义本设计通过用对一个能实现定时,时钟显示功能的时间系统的设计学习,详细介绍了51单片机应用中的数据转换显示,数码管显示原理,静态扫描显示原理,单片机的定时中断原理等,从而达到学习、了解单片机相关指令在各方面的应用。
对于单片机学习者而言,这个程序基本上是一道门槛,掌握了电子钟程序,基本上就可以说把51单片机掌握了80%。
第1页西南科技大学本科生毕业论文第2页第2章 数字钟的功能实现与设计方案2.1 数字钟的功能及设计要求(1) 可以实现时/分/秒/百分秒的显示,可以调整时/分(2) 使用LED 显示(3) 有表示时钟正常工作的装置(4) 能稳定工作,可控制时钟的启动复位(5) 有实现闹铃功能2.2 数字钟的实现形式数字钟既可以通过纯硬件实现,也可以通过软硬结合实现,根据电子时钟的核心部件——秒信号的产生原理,通常有三钟形式:(1) 用NE555时基电路的形式采用NE555时基电路或其他震荡电路产生秒脉冲信号,作为秒加法电路的时钟信号或微处理器的外部中断输入信号,可构成电子时钟。
由555构成的秒脉冲发生器电路如图1-1所示。
输出的脉冲信号V 0的频率F=1.443/(R A +2R B )×C,可通过调节这3个参数,使输V 0的频率为精确的1Hz [3]。
图2-1 基于555的秒脉冲发生器(2) 采用石英钟专用芯片的实现形式采用石英钟专用计时芯片实现的电子钟,具有实现简单、计时精度高的特点。
石英计时芯片(简称“机芯”)比较多,常见的有STP5512F 、SM5546A 和D60400等[4]。
现基于西南科技大学本科生毕业论文第3页5512F 的2秒输出信号作为秒加法电路的计时脉冲,可实现电子时钟。
5512F 的引脚如图1-2所示。
其中,引脚7、8为外接晶振及振荡电路,引脚1接电源正极,电源为1.5伏,引脚3、4原为指针用步进电机线圈的输出驱动端,这里可用3脚作为脉冲输出,频率决定于外接晶振的频率。
(3) 采用基于单片机的实现形式利用单片机的智能性,可方便的实现具有智能数字钟的设计。
而且,微处理系统具有时钟振荡系统,利用系统时钟并借助微处理器的定时/计数器功能可以实现数字钟的功能。
本设计采用AT89C2051单片机设计。
2.3 方案的确定可以从以下几个方面来确定电子闹钟的设计方案。
2.3.1 微处理器采用ATMEL 的AT89C2051微处理器,是基于以下几个因素:①内含Flash 存储器,这在系统的开发过程中,可随意进行程序修改,既便错误编程之后仍可以重新编程,故不存在废品且大大缩短了程序的开发周期;同时在系统工作过程中能有效地保存数据信息。
②采用静态时钟方式,节省电能,这对于降低便携式产品的功耗十分有利。
③由于它是以8031 核构成的,所以它与MCS251 系列单片机是兼容的④AT89C2051为51内核,仿真调试软硬件资源丰富;⑤性价比高,货源充足;⑥DIP20封装,体积小,便于产品小型化;⑦为E 2PROM 程序存储介质,1000次以上擦/写周期,便于变成调试;⑧具有IDLE 和POWER-DOWN 两种工作模式,便于进行低功耗设计;⑨工作电压范围宽:2.7~6V ,便于交直流供电[5]。
2.3.2 显示电路就时钟而言,通常可采用液晶显示或数码管显示。
对于一般的段式液晶屏,需要专门的驱动电路,而且也经显示作为一种被动显示,可视性相对较差;对于具有驱动电路西南科技大学本科生毕业论文和微处理器接口的液晶显示模块(字符或点阵),一般多采用并行机接口,对于微处理器的接口要求较高,占用资源多。
另外,89C2051本身没有专门的液晶驱动接口,因此,本时钟设计采用了数码管显示方式。