Diamond高速并联机械手
达明机械臂应用案例

达明机械臂应用案例全文共四篇示例,供读者参考第一篇示例:达明机械臂是一种智能机器人臂,具有高精度、高效率和多功能的特点。
它可以广泛应用于工业生产线、医疗机器人、物流仓储等领域。
在工业自动化领域,达明机械臂可以完成各种复杂的操作,提高生产效率和质量,降低人工成本,受到了广泛的关注和应用。
在汽车生产线上,达明机械臂可以用于装配、焊接、喷涂等工作,取代传统的人工操作,提高了生产效率和质量。
在电子制造业中,达明机械臂可以用于IC芯片的生产测试、手机组装等操作,可以精确控制操作,减少了人为失误,提高了生产速度和产品质量。
在医疗机器人领域,达明机械臂可以用于手术操作,可以精准控制手术器械的位置和力度,减少了手术风险,提高了手术成功率。
在物流仓储领域,达明机械臂可以用于货物的搬运、分类、装箱等操作,可以自动化完成仓库的各种工作,提高了物流效率,减少了人力成本。
在农业生产领域,达明机械臂可以用于农田的播种、喷洒、收割等操作,可以提高农作物的产量和质量,减少了农民的体力劳动,增加了农田的效益。
除了以上领域,达明机械臂还可以应用于航空航天、医疗康复、科研实验等领域,具有广泛的应用前景和市场需求。
随着人工智能、云计算、物联网等技术的不断发展,达明机械臂将会更加智能化、灵活化、多功能化,为人类的生产和生活带来更多的便利和效益。
在未来,我们相信达明机械臂将会成为工业制造、物流仓储、医疗健康等领域的重要工具和装备,推动着生产方式的转型升级,为人类创造更加美好的未来。
【达明机械臂应用案例】展示了它在各个领域的应用场景和优势,相信在不久的将来,达明机械臂将会成为人类社会发展的重要推动力量。
第二篇示例:达明机械臂是一种具有自主学习和智能控制功能的机械臂,广泛应用于工业生产线、医疗领域、军事装备等多个领域。
它具有高速、高精度、灵活性强等特点,可以完成各种复杂的任务。
本文将介绍几个关于达明机械臂的应用案例,展示其在不同领域的价值和效果。
天津大学下属的研究所

制造装备与系统研究所方向一:并联构型装备(Parallel Kinematic Machines)是以并联机构为全部或部分进给机构的机器人或机床系统。
设计理论与关键技术在并联机构的拓扑结构创新设计,运动学分析与尺度综合,精度设计与运动学标定,静、动态刚度分析与动态设计,轨迹规划,开放式数控系统开发以及装备的可重构布局设计等方面做了大量研究工作,取得一批理论成果。
样机建造与产业化Stewart型并联机床受到国家863高技术发展计划和国家自然科学基金资助,与清华大学合作,于1997年在国内率先开展Stewart 型并联机床设计理论、关键技术和原型样机建造工作,内容涉及工作空间分析与综合等方面,为原型样机的设计提供了理论依据。
该项目通过国家教育部鉴定,发表高水平论文多篇,1999年获中国高校科技进步2等奖。
三平动自由度并联机床3-HSS并联机床是在天津市科技攻关和天津大学211工程项目资助下研制成功的我国首台商品化三坐标并联机床,该机床采用平行四边形原理,具有刚度和精度高等特点。
该项目后得到天津市重大科技攻关项目支持,开发基于主模块的5坐标加工中心,目前已开发出立式和卧式两种机型并出售2台。
球面并联机构三自由度球面并联机构是在国家“863”计划资助下研制成功的新型数控装置,能够实现绕三个正交轴的转动,可作成各种高速跟踪装置。
高速轻型并联机械手Diamond机构是国家“863”计划资助下,由天津大学发明的2平动自由度并联机构,是国际著名Delta并联机械手的一种2维形式,具有速度高、制造成本低等优点,特别适合在完成电子、轻工、食品和医药行业中的高速抓取操作,目前已出售4台,并在电池制造企业得到应用。
5坐标可重构混联机械手TriVariant 机械手是在国家自然基金资助下,由天津大学发明的5坐标混联机械手,其结构突破了国际著名的Tricept 机械手的知识产权,具有速度高、结构简单、操作空间体积比大、可重构性强等优点,可广泛应用于汽车、航空、建筑等行业的焊接、切割、喷涂、高速加工和装配等操作。
Diamond高速并联机械手

人 机 构 , 现原 始 创 新 , 攻 克 其 设计 制造 与控 制技 术 ; 实 并 ②
以 该高 速 并 联 机 器 人机 构 为核 心 , 展 延 续 创 新 。 结 合 典 开 型 行 业 需 求 , 明 并 研 制 新 型 自动 化 装 备 , 在 工 程 中 得 发 并
到 应用 。
连 的 平 行 四边 形 结 构 。 各 运 动部 件 采 用 铰 接 连 接 , 用 外 并 转 动 副驱 动 。在 安 装 于 基 座 上 的伺 服 电机 驱 动 下 , 用 平 利
2 创 新 点
行 四边 形 的姿 态 保 持 性 将 2个 主动 臂 的 独 立 转 动 转 换 为
动 平 台 的 二维 平 动 。 该 发 明 的 特 点在 于 : 在 其 中 一 条 支 ①
间隙
,
i Q i i
而 且 在 保 证 所 需 自E 度 的 前 提 下 便 于 装 配 及提 高 r a
Z n
垂 直 于 运 动 平 面 的静 、 刚度 。该 机 构 的 主 要 优 点 为 : 动 结
选 或依 赖 进 口设 备 , 者 效 率 低 , 因操 作疲 劳误 检 而 造 前 易 成 重 大 经 济 损 失 ; 者 价 格 昂 贵 , 难 于 实 现 与前 序 设 备 后 且
的速 度 完成 插 装 、 装 、 装 、 封 包 分检 等 操作 。 为 了提 高 生 产 率, 上述 操 作 需 要借 助 机 械 手来 完 成 。 外 转动 副驱 动 的并
联 机 器 人 可使 末端 执 行器 获 得 极 高 的速 度 。
目前 , 世界 上 最 具 代表 性 的高 速 抓 放 并联 机 器 人 当属
-
生产 的最 后 一 道 关键 工 序 , 目的是 按 照 电化 学 特 性 的 一 其 致 性 对 电池 分 类 , 避 免 水 桶 效 应 , 证 成 组 使 用 时 的 寿 以 保 命 和性 能 。 然 而 , 国 电池 制造 企 业 长 期 以来 采 用 手 筋 连 接 双 内 从 动 臂 ,不 但 可 有 效 地 消 除铰 链
速并联机械手动力学建模及计算力矩控制

速并联机械手是一种具有广泛应用前景的重要工业装备,它在现代工业生产中发挥着至关重要的作用。
对于速并联机械手的动力学建模和计算力矩控制是其核心技术之一,本篇文章将从深度和广度两方面进行全面评估以及深入探讨该主题。
一、速并联机械手的动力学建模1.1 速并联机械手的基本结构及工作原理在探讨速并联机械手的动力学建模之前,首先需要了解其基本结构和工作原理。
速并联机械手通常由多个平行的机械臂和执行器组成,通过联机控制实现对工件的快速、高精度的操作。
其工作原理主要是基于平行机构的运动学和动力学特性进行设计和控制。
1.2 动力学建模的基本原理动力学建模是速并联机械手设计和控制的关键环节,其基本原理是通过研究速并联机械手各部件之间的相互作用力和运动学关系,建立动力学方程,以描述其运动学和动力学特性。
1.3 动力学建模的方法和技术在动力学建模过程中,常用的方法和技术包括拉格朗日方程、牛顿-欧拉方程等,通过应用这些方法和技术,可以较为准确地描述速并联机械手在不同工况下的动力学特性。
二、速并联机械手力矩控制2.1 力矩控制的基本原理速并联机械手力矩控制是指通过对机械手执行器的力矩进行实时控制,实现对工件的精准操作。
其基本原理是通过传感器实时采集机械手各部件的力矩信息,并通过控制算法对执行器施加的力矩进行调节,以实现对工件的精准控制。
2.2 力矩控制的方式和策略力矩控制的方式和策略包括基于反馈的PID控制、基于力矩传感器的力反馈控制以及基于自适应控制算法的力矩控制等,这些控制方式和策略在实际应用中都具有各自的优势和局限性。
2.3 力矩控制在速并联机械手中的应用力矩控制在速并联机械手中具有重要的应用意义,通过合理选择控制方式和策略,可以实现对工件的高精度操作,提高生产效率和产品质量。
三、个人观点和理解速并联机械手的动力学建模及计算力矩控制是机械手设计和控制领域的重要研究内容,深入研究该主题对于提高机械手的自动化程度和精准度具有重要意义。
Diamond高速并联机械手

23
TIANJ IN S CIENCE & TECHNOLOGY
P ART THREE:创新技术
天 2007.4
津 科 技
系统的结构、运动学和静、动态性能关于任务空间对称。 ②采用加强筋连接双内从动臂, 不但可有效地消除铰链 间隙, 而且在保证所需自由度的前提下便于装配及提高 垂 直 于 运 动 平 面 的 静 、动 刚 度 。 该 机 构 的 主 要 优 点 为 : 结 构轻 巧 新 颖、可 实 现 高速 运 动 , 便于 作 为 模块 独 立 使用 , 还 可与一单自由度进给机构串接构成 3 平动自由度混联机 械手。 2.2 Dia mond 机构 设 计 理论 与 关 键技 术 2.2.1 尺度综合与驱动器参数匹 配 技术 尺 度 综合 涉 及 在满足工程约束条件下, 确定构件尺度参数, 使得 Diam ond 机 构 在 其 工 作 空 间 内 性 能 最 优 。 为 此 提 出 一 种 以雅可比最小奇异值和单轴驱动力矩全域数字特征为性 能 指标 的 尺 度综 合 新 方法, 指 导 了 Diam ond 机 构 的 系 列 化设计。在此基础上, 建立了系统的刚体逆动力学模型, 并利用矩阵奇异值分解原理, 提出了一种伺服电机参数 的快速预估方法, 进而为驱动器参数匹配提供了重要的 理论依据。 2.2.2 动态设计技术 采用有限 元 法 建立 了 系 统的 弹 性 动力学模型, 并以单位质量所提供的低阶固有频率全域 均 值最 高 为 目标 实 现 了 Diam ond 机 构 运 动 构 件 截 面 参 数 的优化设计。同时采用铝合金和碳纤维制作运动部件, 实 现了轻量化设计, 有效地提高了系统的比刚度, 保证了高 速抓放操作时的优良动态特性。 2.2.3 精度设计、装配工艺与运 动 学 标定 技 术 建立 了 Diam ond 机 构 的 全 参 数 误 差 模 型 , 揭 示 出 影 响 末 端 执 行 器 可 控( 位 置) 和 不可 控( 姿 态) 精 度 的 误差 源 , 实 现了 机 构 铰链间隙圆和平行四边形对边误差的公差优化设计, 为 制定关键零部件的制造和装配工艺提供了重要的理论依 据。在建造过程中, 提出采用成组技术消除末端执行器非 可控误差的措施, 保证了机构的基础精度。针对该机构的 结构特点, 提出一种先辨识并补偿主动臂回零误差, 再识 别和补偿其他几何参数误差的运动学标定方法。以上研 究 有 效 提 高 了 机 构 的 几 何 精 度 , Diam ond 800 型 机 械 手 定位精度为 0.09 mm , 重复定位精度为 0.03 mm , 满足多 数抓取操作的实际需求。 2.2.4 轨迹规划与核心控制算法 轨 迹规 划 和 控制 器 参 数整 定 是 保证 Diam ond 机 构 在给 定 定 位精 度 下 实 现 高 速 抓放的重要技术手段。为此, 在考虑关节峰值力矩和峰值 转速等约束条件下, 提出一种直线 / 圆弧过渡和修正梯形 运 动规 律 的 轨迹 规 划 方法 。针 对 Diam ond 机 构 折 算 到 关 节空间惯性负载随位形变化的特点, 建立了机电耦合动 力学模型, 并提出一种控制器参数整定方法。上述措施在 保证定位精度的前提下有效地提高了抓取频次。 Diam ond 600 型 机 械 手 在 定 位 精 度 为 0.1 m m 时 的 抓 取 频次可达到 120 次 / 分。 2.3 延续创新 2.3.1 高性能锂电池分选装备 分 选 操作 是 锂 离子 电 池
基于PLC的高速并联机械手控制技术

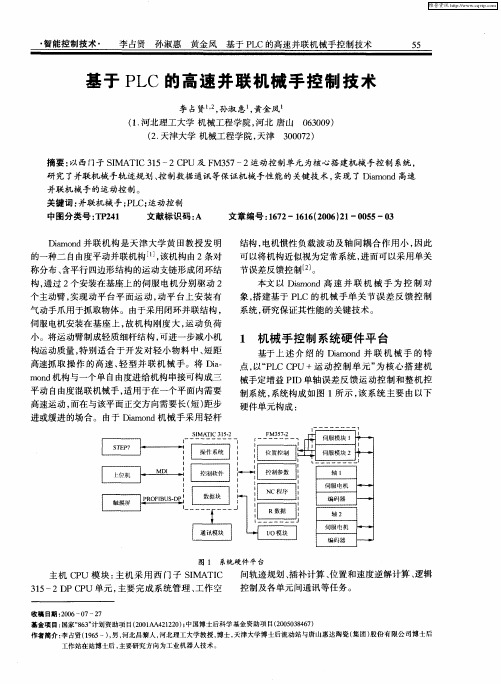
基于PLC 的高速并联机械手控制技术李占贤1,2,孙淑惠1,黄金凤1(1.河北理工大学机械工程学院,河北唐山 063009)(2.天津大学机械工程学院,天津 300072)摘要:以西门子SIMATIC 315-2CPU 及FM357-2运动控制单元为核心搭建机械手控制系统,研究了并联机械手轨迹规划、控制数据通讯等保证机械手性能的关键技术,实现了Diamond 高速并联机械手的运动控制。
关键词:并联机械手;PLC;运动控制中图分类号:TP241 文献标识码:A 文章编号:1672-1616(2006)21-0055-03 Diamond 并联机构是天津大学黄田教授发明的一种二自由度平动并联机构[1],该机构由2条对称分布、含平行四边形结构的运动支链形成闭环结构,通过2个安装在基座上的伺服电机分别驱动2个主动臂,实现动平台平面运动,动平台上安装有气动手爪用于抓取物体。
由于采用闭环并联结构,伺服电机安装在基座上,故机构刚度大,运动负荷小。
将运动臂制成轻质细杆结构,可进一步减小机构运动质量,特别适合于开发对轻小物料中、短距高速抓取操作的高速、轻型并联机械手。
将Dia mond 机构与一个单自由度进给机构串接可构成三平动自由度混联机械手,适用于在一个平面内需要高速运动,而在与该平面正交方向需要长(短)距步进或缓进的场合。
由于Diamond 机械手采用轻杆结构,电机惯性负载波动及轴间耦合作用小,因此可以将机构近似视为定常系统,进而可以采用单关节误差反馈控制[2]。
本文以Diamond 高速并联机械手为控制对象,搭建基于PLC 的机械手单关节误差反馈控制系统,研究保证其性能的关键技术。
1 机械手控制系统硬件平台基于上述介绍的Diamond 并联机械手的特点,以 PLC CPU +运动控制单元 为核心搭建机械手定增益PID 单轴误差反馈运动控制和整机控制系统,系统构成如图1所示,该系统主要由以下硬件单元构成:图1 系统硬件平台主机CPU 模块:主机采用西门子SIMAT IC 315-2DP CPU 单元,主要完成系统管理、工作空间轨迹规划、插补计算、位置和速度逆解计算、逻辑控制及各单元间通讯等任务。
并联机床的设计理论与关键技术

详解并联机床的设计理论与关键技术1 概述为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(Parallel Machine Tool),又称虚(拟)轴机床(Virtual Axis Machine Tool) 或并联运动学机器(Parallel Kinem atics Machine)。
并联机床实质上是机器人技术与机床结构技术结合的产物,其原型是并联机器人操作机。
与实现等同功能的传统五坐标数控机床相比,并联机床具有如下优点:刚度重量比大:因采用并联闭环静定或非静定杆系结构,且在准静态情况下,传动构件理论上为仅受拉压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
响应速度快:运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动平台获得很高的进给速度和加速度,因而特别适于各种高速数控作业。
环境适应性强:便于可重组和模块化设计,且可构成形式多样的布局和自由度组合。
在动平台上安装刀具可进行多坐标铣、钻、磨、抛光,以及异型刀具刃磨等加工。
装备机械手腕、高能束源或CCD摄像机等末端执行器,还可完成精密装配、特种加工与测量等作业。
技术附加值高:并联机床具有“硬件”简单,“软件”复杂的特点,是一种技术附加值很高的机电一体化产品,因此可望获得高额的经济回报。
目前,国际学术界和工程界对研究与开发并联机床非常重视,并于90年代中期相继推出结构形式各异的产品化样机。
1994年在芝加哥国际机床博览会上,美国Ingersoll铣床公司、Giddings & Lewis公司和Hexal公司首次展出了称为“六足虫”(Hexapod)和“变异型”(VARIAX)的数控机床与加工中心,引起轰动。
此后,英国Geodetic公司,俄罗斯Lapik公司,挪威Multicraft公司,日本丰田、日立、三菱等公司, 瑞士ETZH和IFW研究所,瑞典Neos Robotics公司,丹麦Braunschweig公司,德国亚琛工业大学、汉诺威大学和斯图加特大学等单位也研制出不同结构形式的数控铣床、激光加工和水射流机床、坐标测量机和加工中心。
并联机器人正运动学与NURBS轨迹规划

282机械设计与制造Machinery Design&M anufacture第4期2021年4月并联机器人正运动学与NURBS轨迹规划张皓宇\刘晓伟、任川、赵彬w(1.辽宁省气象信息中心,辽宁沈阳110168:2.沈阳新松系统自动化股份有限公司,辽宁沈阳110168;3.东北大学信息科学与工程学院,辽宁沈阳110819)摘要:并联机器人是一种具有高栽荷自重比的封闭式运动结构,针对并联机器人运动控制和N U R B S轨迹问题进行了深入的研究,首先从并联机器人的逆运动学问题进行了解析方法的求解其次,针对正运动学(F KP)在教学上是难以解决问题,提出了一种多层感知器进行反向传播学习的神经网络进行实时求解。
再次,开发了基于N U R B S的通用插补器,它可以处理任何类型的几何图形使得机器人运动轨迹平滑。
最后利用实验验证了运动学和N U R B S曲线求解并联机器人模型的正确性。
该策略在少数迭代和很少执行时间内,位置和方向参数的精度分别接近0.01m m和0.01。
,验证了算法的有效性和正确性。
关键词:并联机器人;N U R B S曲线;运动学;神经网络中图分类号:T H16;TP242.3文献标识码:A文章编号:1001-3997(2021 )04-0282-05Forward Kinematics Control and NURBS Trajectory Planning for Parallel RobotsZHANG Hao-yu1,UU Xiao-wei1,REN Chuan1,ZHAO Bin2.3(1.R e s e a r c h e r L e v e l S e n i o r E n g i n e e r o f M e t e o r o l o g i c a l I n f o r m a t i o n Ce nt er,L i a o n i n g Shenyang110168,China;2.SIASUNRo bot&Aut om at io n Co.,L t d.,L i a o n i n g Shenyang110168,China;3.S c h o o l o f I n f o r m a t i o n S c i e n c e&E n g i n e e r i n g,N o r t h e a s t e r n U n i v e r s i t y,L i a o n i n g Shenyang110819,China)A b s tr a c t:Parallel robot is a closed motion structure with a high load to weight ratio.In this paper^the motion control of parallel robot and NURBS trajectory are studied in depth.Firstly,the inverse kinematics o f parallel robot is solved by analytical method.Secondly,the forward kinematics(FKP)is difficult to solve mathematically9this paper proposes a multilayer perceptron back-propagation learning neural network for real-time solution.Thirdly y a universal interpolator based on NURBS is developedy which can handle any type of geometric shapes to make the robot's trajectory smooth.Finally,the correctness of kinematics and NURBS curves for solving parallel robot model is verified by experiments.The accuracy of position and direction parameters of this strategy is close to O.Q\mm and0.Q\o respectively in few iterations and f ew execution time,which verifies the effectiveness and correctness of the algorithm.Key Words-.Parallel Robot;NURBS Curve;Kinematics;Neural Networkl引言并联机构学理论研究蓬勃发展,并联机器人的运动学理论 也不断得到丰富"-31。
机械手臂搬运加工流程控制
新疆工业高等专科学校实训报告实训科目PLC基础及应用系部电气与信息工程系专业生产过程自动化班级08-23-(1)班姓名孙玉莲实训地点仓房沟校区311教室指导教师毛昀老师完成日期2010年12月2日新疆工业高等专科学校教务处印制说明一、报告封面必须按指定封面用钢笔或炭素笔填写,字体要规范。
二、报告应含有以下内容:1、前言2、实习目的及要求3、实习时间4、实习地点5、实习单位和部门6、实习内容:按实习大纲、实习进度计划的要求和规定,并结合自己的体会写。
7、实习总结指导教师评语及成绩评定电气系《plc设计》实训任务书教研室主任(签名)系(部)主任(签名)年月日PLC就是可编程控制器,它是一种数字式运算作的电子系统,专为工业环境下应用而设计,因此它具有可靠性高,抗干扰能力强,功能强等优点而普遍应用在控制领域。
本设计主要阐述了机械手的构成、工作原理、工作条件。
运用可编程控制器(PLC)对机械手臂搬运加工流程控制的方案,此方案大大提高了工作效率。
本设计利用PLC控制机械手实现全自动运行。
关键词: PLC 机械手自动控制1 可编程控制器简介 (1)1.1 PLC的结构及各部分的作用 (1)1.2 PLC的工作原理 (3)1.3 PLC的程序编制 (3)2 可编程控制器基本指令简介 (4)2.1标准触点指令 (5)2.2串联电路块的并联连接指令OLD (5)2.3并联电路的串联连接指令ALD (5)2.4输出指令 (5)2.5置位与复位指令S、R (6)2.6跳变触点EU,ED (6)2.7空操作指令NOP (6)2.8程序结束指令END (6)3 可编程控制器梯形图编程规则 (6)4 机械手 (7)4.1机械手历史 (7)4.2机械手构成 (8)4.3机械手分类 (8)4.3.1油田钻柱操作机械手 (8)4.3.2硬臂式助力机械手 (9)4.3.3软索式机械手 (9)4.3.4T型助力机械手 (9)5 机械手臂搬运加工流程控制 (10)5.1实训目的 (10)5.2控制要求 (10)5.3机械手动作的模拟实验面板图 (10)5.4输入/输出接线列表 (10)5.5工作过程分析 (11)5.6梯形图参考程序 (11)总结 (12)致谢 (13)参考文献 (14)附录 (15)1 可编程控制器简介随着微处理器,计算机的和数字通讯技术的飞速发展,计算机控制技术已经渗透到所有工业领域。
机械手_外文文献及翻译
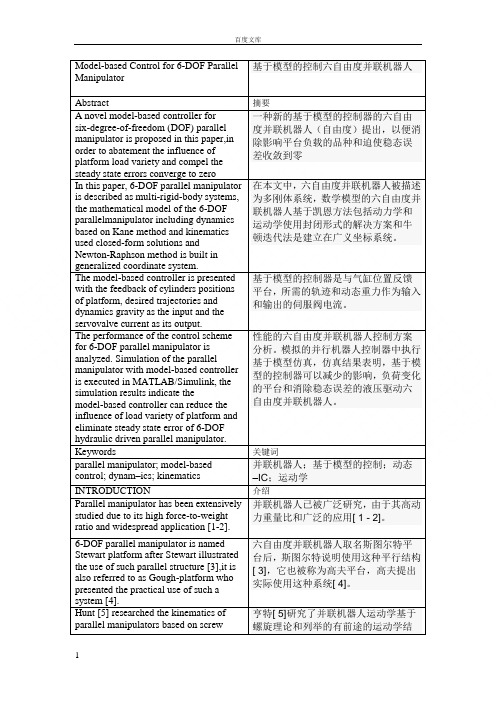
Model-based Control for 6-DOF ParallelManipulator基于模型的控制六自由度并联机器人Abstract 摘要A novel model-based controller forsix-degree-of-freedom (DOF) parallel manipulator is proposed in this paper,in order to abatement the influence of platform load variety and compel the steady state errors converge to zero 一种新的基于模型的控制器的六自由度并联机器人(自由度)提出,以便消除影响平台负载的品种和迫使稳态误差收敛到零In this paper, 6-DOF parallel manipulator is described as multi-rigid-body systems, the mathematical model of the 6-DOF parallelmanipulator including dynamics based on Kane method and kinematics used closed-form solutions andNewton-Raphson method is built in generalized coordinate system. 在本文中,六自由度并联机器人被描述为多刚体系统,数学模型的六自由度并联机器人基于凯恩方法包括动力学和运动学使用封闭形式的解决方案和牛顿迭代法是建立在广义坐标系统。
The model-based controller is presented with the feedback of cylinders positions of platform, desired trajectories and dynamics gravity as the input and the servovalve current as its output. 基于模型的控制器是与气缸位置反馈平台,所需的轨迹和动态重力作为输入和输出的伺服阀电流。
基于PLC的高速并联机械手控制技术
关键词: 并联 机械 手 ;L 运 动控 制 P C; 中图分 类号 :P 4 T 21 文献标 识码 : A 文章 编号 :6 2 66 20 )1 05—0 17 —1 1 (06 2 —0 5 3
Di n a d并联 机 构 是天 津 大 学 黄 田教 授发 明 mo 的一种二 自由度 平动 并联 机构 ll l, 该机 构 由 2条 对 称 分布 、 含平 行 四边形 结 构 的运 动 支链 形成 闭环 结
负责 关节变 量 的 P T插 补和 电机 运动控 制 。 V 工 业触 摸屏 : 选用 TP 7 0彩 色 工业 触 摸 屏 2 —1
动轨迹看作 A C F 段直线 , C, F, H 3 对于每一轨迹 段, 设定手爪 的运动过程为静止一加速一减速一静
止 , 要求 动平 台 的速度 和加速 度在 轨迹段 的起 点 这
结构, 电机惯性负载波动及轴间耦合 作用小 , 因此 可 以将 机构 近 似视 为定 常 系统 , 而可 以采 用单 关 进
节 误差 反馈 控 制【l 2。 本文 以 Di n a d高 速 并 联 机 械 手 为 控 制 对 mo
构, 通过 2 个安装在基座上 的伺服电机分别驱动 2
个 主动臂 , 实现 动平 台平 面运 动 , 平 台上 安装 有 动
象, 搭建基于 P C的机械手单关节误 差反馈 控制 L
气动手爪用于抓取物体 。由于采用闭环并联结构 , 伺 服 电机 安装 在 基 座 上 , 机 构 刚 度 大 , 动 负 荷 故 运 小。将运动臂制成轻质细杆结构 , 可进一步减小机 构运动质量 , 特别适合 于开发对轻小物料中、 短距
35 2D P 1 — PC U单元 , 主要完成系统管理 、 工作空
并联机器人的机构简图和自由度
2.1.2 并联机器人的机构运动简图的绘制方法
在绘制并联机器人的机构运动简图时,首先要分析该 并联机器人的实际构造和运动情况,确定其驱动部分(即运 动起始部分)和执行部分(即直接执行工作任务的部分), 然后循着运动传递的路线,分析其传动部分,由多少构件组 成的,各构件之间组成了何种运动副和运动支链,再循着并 联机器人的运动传递路线,用国家标准规定的机构运动简图 用图形符号(GB/T 4460-2013),绘出并联机器人的机构运 动简图。
习题
2-6. 绘制图1-21液压缸驱动的六自由度的Stewart平 台并联机器人的机构运动示意图,并计算机构的自 由度,判别机构的运动确定性。 2-7. 自己查找文献,阅读1~2篇并联机器人或并联 机构的文献,介绍其并联机器人或并联机构的简图 及工作原理。 2-8. 自己查找文献,阅读1~2篇并联机器人或并联 机构的自由度计算的文献,介绍其自由度的计算方 法及过程。 2-9. 自己查找文献,阅读1~2篇用螺旋理论计算并 联机器人或并联机构的自由度的文献,介绍其自由 度的计算过程。
并联机器人的机构运动简图的绘制方法
并联机器人的机构运动简图的绘制原则是简单、清楚地 把并联机器人的运动情况正确地表示出来,并具有易读性。
为了将并联机器人的机构运动简图表示清楚,需要恰当 地选择投影面,选择适当的比例尺。一般可以选择与并联机 器人的运动平面平行的平面为投影面。在绘制空间运动的并 联机器人的机构运动简图时,一般可以选择可展示主要构件 或多数构件的运动平面为投影面,用立体图表达。为了能清 楚地表达并联机器人的运动,可以用展开图,也可以增加局 部示图,并要同一图面上表达。
并联机器人
(第 1 版)
第2章 并联机器人的机构简图和自由度
讲授内容
SimotionD435在机械手搬运中的应用

《工业控制计算机》2014 年第 27 卷第 11 期 53Simotion D435 在机械手搬运中的应用Application of Simotion D435 in Handling Robot张伟平 (山西省自动化研究所,山西 太原 030012)摘 要主要介绍 S i mot i on D435-2D P 运动控制器在 2 轴机械手搬运中的应用,通过对机械手相关行业背景及工艺过程的介 绍,详细阐述了 S i mot i on D435-2D P 控制系统在机械手调试中功能的实现。
关键词:D i a m ond 机构,2 自由度,插补运动,S i mot i on ,书本型整流单元AbstractT hi s paper des cr ibes t he S i mot i on D435-2DP i n 2-axi s mot i on c ont rol l er ha nd li n g t he r ob ot,t he r ob ot t hr oug h t he i nt ro- duc t i on of t he bac kgr ound a nd pr oc ess -rel ate d i n dus t ri es,and el a b orat es S i mot i on D435-2DP r ob ot c ont rol s yste m i m p l e - m e nte d i n de bugg i n g f unct ions 〃Keyw or ds :Diamond agencies,2 degrees of freedom,Interpolation motion,Simotion,Books rectifier unit本项目是为制药厂研发设计的 2 自由度机械手, 来完成氯 化钠溶液袋的抓取,装箱动作。
1 项目研究内容 1〃1 机械手机械部分此次项目采用了 2 自 由 度 经 济 型 D i a mon d 高速搬运机器手[1]。
高速、高性能机械手的技术要点分析

高速、高性能机械手的技术要点分析作者:Mr_Robot 文章来源:更新时间:2009年10月19日优酷上的一个视频《我相信这只手能拦截爱国者导弹》短短的一个月已经有了22万的点击次数,由此可见人们对这个机械手的关注程度。
作为一个长期关注机器人技术的人而言,我也认为这个机械手是当前最好的灵巧手之一。
这个机械手的特点是高速、准确,从而展现出各种令人惊叹的动作,再通过视频慢动作特效展现,其展示效果的确令人惊叹。
准确这一特点某种程度上是高速的衍生效果。
将这个机械手做下系统划分,可以分为:高速机械系统、高速传感器系统、高速控制系统,这三个系统没有优先级,同样重要,缺一不可。
(/v_show/id_XMTE1MDUxMDcy.html)(一)高速机械系统高速机械系统是这个机械手中难度最低的一部分,我们可以看到各种各样的工业机器人,他们都能够快速的在工位之间移动。
快速的钻头、切割机、螺旋桨等速度可以高达几万转每秒。
所以,高速对于机器人而言并不是瓶颈,而是有没有实际需要。
以自主移动机器人为例,它的本体大多是一种轮式小车,照理说它可以跑得飞快,盐湖城的试车场最快赛车速度已经有400多公里每小时的记录,不过最先进的自主移动机器人“火星车”只能以5cm/s的速度行走,速度快了之后它就反应不过来,就可以撞到障碍物或掉到沟里。
机械手高速移动的时候和其它的回转机械不一样,因为它的行程是一个有限的角度,需要在这个角度内不断的起停和反向。
高速运动的时候产生的惯性力会对到位控制和机械系统可靠性产生重大的影响。
结构越重,产生的惯性力就越大,位置控制的难度也随之增加。
轻质的物体在反复摆动过程中不会对摆臂关节产生多少作用力,重物可能会让关节负荷很重的交变载荷,这样情况下机械系统很快就会被破坏掉。
根据石川小室研究室的官方材料,这个机械手的使用了轻质材料,没有透露具体是什么,笔者认为碳纤维是很优秀的解决方案。
(二)高速传感器系统根据第一点的分析,我们可以看到:一个机器人系统的高速响应能力的主要瓶颈是感知系统和控制系统。
2014第三届自制教具评选活动-初评获奖通知初评获奖名单

电类初评获奖名单(109 个)
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 作品名称 CTS1600-I 控制技术综合实验系统 模块化继电保护教学实验装置 TMS320C6722 多功能教学实验系统 嵌入式系统通用开发平台 大学生电子设计竞赛及学生课外科技创新培训平台 嵌入式系统控制实验箱 CAN 总线测控系统实验箱 工业自动化与控制网络实验平台 全自动应变测试仪 模拟电子技术实验教学平台 智能车实验平台 MCU-IV 模块组合式单片机实验箱 电磁波综合教学实验仪 EDA 与单片机及 SOPC 一体化实验教学平台 射频无线收发系统实验箱 显示器件驱动技术 基于 ARM 的大手机开发系统 完成单位 北京航空航天大学 北京交通大学 北京交通大学 北京交通大学 北京科技大学 北京邮电大学 北京邮电大学 北京邮电大学 大连工业大学 大连理工大学 大连理工大学 大庆师范学院 电子科技大学 电子科技大学 电子科技大学 电子科技大学 电子科技大学 完成人 李坚、陈博、靳永卫、齐海涛、蒋龙、马鹏举、王亮 倪平浩、黄梅、和敬涵、李继红 杜普选、马庆龙、闻跃、赵翔 马庆龙、闻跃、赵翔 冯涛、崔家瑞、李擎、王粉花 郭磊、余瑾、李忠明 杨军、余瑾、白亚文、陈斯祎、李峰 余瑾、杨军、姚燕 丁金华、雷晓静、周茂军、李英利 程春雨、吴雅楠、孙鹏、林秋华、郝育文 吴振宇 刘开绪 杨德强、陈波、潘锦、张跃辉、王志敏 唐续 陈瑜、习友宝 蒋泉 王坚、李桓、李玉柏 申报类别 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类
电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类 电类
高速并联机械手抓放操作时间最优轨迹规划

高速并联机械手抓放操作时间最优轨迹规划王攀峰;梅江平;黄田【摘要】提出了一种两平动自由度高速并联机械手--Diamond机构的时间最优轨迹规划方法.首先分析得到3次样条规律的操作空间轨迹误差与关节空间插扑节点间距的4次方成正比,然后确定出典型抓放操作轨迹各段的最大插补间距并获得抓放轨迹上一组最少轨迹点序列,有效提高了计算效率.在此基础上,以关节速度、加速度和其变化率,以及关节驱动转矩为约束条件,以抓放时间最短为目标,采用复合型优化法计算出电池分选操作的最大和最小单程运行时间分别为0.21 s和0.13 s,平均分选速度超过100次/min.该方法已成功应用于由4台Diamond机械手构成的高性能锂离子电池分选系统.【期刊名称】《天津大学学报》【年(卷),期】2007(040)010【总页数】7页(P1139-1145)【关键词】并联机械手;时间最优;轨迹规划【作者】王攀峰;梅江平;黄田【作者单位】天津大学机械工程学院,天津,300072;天津大学机械工程学院,天津,300072;天津大学机械工程学院,天津,300072【正文语种】中文【中图分类】TG156在电子、轻工、食品以及医药等行业中,通常需要以很高的速度完成诸如包装、分拣等抓放(pickand-place)操作,且被操作对象具有体积小、重量轻的特征.外转动副驱动的并联机械手由于驱动器可固定在机座上,动臂可制成轻杆,故易于实现高速运动,因此特别适用于此类操作.Delta、HEXA、H4以及 Diamond[1—4]等 2~6自由度高速并联机械手均是针对这一需求开发的.基于对系统输入和自身动力学性能的考虑,实现上述机械手高速抓放操作的途径有3种:①通过轻量化设计尽量降低运动部件的惯性;②配有可满足高速高精度点位控制需求的控制系统;③合理规划末端执行器的轨迹.显然,当系统搭建完毕后,合理的轨迹规划对有效减低折算到伺服轴的惯性负载及其波动,提高末端执行器的速度和精度具有重要的作用.此时,轨迹规划问题通常可表述为:根据任务需要和避免干涉等条件在操作空间中规划一条末端执行器的理论路径;在关节空间或操作空间中选择适当的运动规律,使得在一定约束条件下(如伺服电机的转速和/或转矩等不超过标定值),由起点达到终点所用时间最短,即构成所谓的时间最优轨迹规划问题.在时间最优轨迹规划问题中,可以在操作空间,亦可以在关节空间中规划运动规律.在操作空间中规划虽然直观,但需经运动学逆解得到关节变量,因此当考虑在关节空间施加约束条件时,通常需在该空间中进行规划.目前,在关节空间中规划的研究多集中在关节运动规律的选择及模型参数的优化两方面.常用的运动规律包括 3次多项式、高阶多项式、B样条函数以及Bezier曲线等[5—8];其中3次样条函数在机器人控制领域中应用最为广泛.优化方法则以Lin等[9—10]提出的复合形算法为代表.笔者针对用 Diamond高速并联机械手开发锂离子电池分选装备的需求,在系统运动学及其动力学分析[11—13]的基础上,通过揭示末端执行器轨迹精度与关节插补节点间距的内在联系,确定可满足电池抓放操作轨迹精度要求的最少插补点序,进而以关节力矩、速度、加速度及其变化率为约束条件,采用复合形算法实现系统的末端执行器的时间最优轨迹规划.如图 1所示,在以 Diamond机械手为核心硬件的电池分选装备中,机械手本体由静平台、动平台和2条对称的支链组成,每条支链又分别由2组平行四边形结构串接而成,中间用肘架连接.动平台上安装有气动手爪,用于夹持电池,而进/出料系统垂直于机械手运动方向独立布置.Diamond机械手的任务是将托盘中的电池按照其类别依次放置在传送带的不同磁道上.分拣过程可分解为 3个动作:从托盘中提取电池,水平运送到传送带上方,按类别放置在指定磁道上.气动手爪的运动轨迹如图1中虚线所示,其中抓取电池和放置电池的两竖直段所需轨迹精度较高,而水平段需要轨迹精度较低.Diamond机械手运动学和动力学模型是实现时间最优轨迹规划的工作基础;该机械手可简化成图2所示的等效5杆铰接机构.图中,、、和表示支链i中主动臂、从动臂的长度及单位矢量,和表示它们的位置角;r表示动平台参考点O′的位置矢量,e表示和距点O的距离.详细的运动学和动力学分析参见参考文献[11—13],本文不再赘述.2.1 分段3次样条函数设在1个抓取周期中,某关节变量的插补序列为,其相应的时间间隔序列为.注意到动平台在抓放操作起点和终点的速度和加速度为 0,故在关节空间中相应关节速度和加速度也应为 0.此外,考虑到任意插补点处的速度和加速度连续,故采用分段3次样条函数插补运算可得到插补点i处的关节加速度,即由式(1)解算出a后,可得到各插补段上关节位移q、速度v和加速度a的运动规律,即2.2 插补误差分析当忽略其他因素影响时,轨迹精度在很大程度上与所采用的插补方式和节点间距有关.因此,选用插补规律后,合理地选择插补点间距便成为在保证给定轨迹精度条件下有效提高电池分选效率的重要措施.前人工作表明[14]:并联机床直线和抛物线插补方式下最大轨迹偏差分别与插补节点间距的2次方和3次方成正比.采用同样方法,可证明采用3次样条函数插补时,Diamond机械手在关节空间中的轨迹最大偏差与相邻插补点间距的4次方成正比,即式中:为关节最大转角误差;S为相邻节点最大间距;k为比例系数.可以得到动平台最大位置偏差为式中为雅克比矩阵.可见,与S的 4次方成正比,并随机械手位形变化.注意到在高速抓放操作过程中,速度最高和轨迹误差最大处一般位于轨迹段的中间位置,故仅需考察点O′在工作范围中点,即时分别沿x和y轴的最大轨迹误差随插补间距的变化规律(电池分选装备用 Diamond 800机械手的变化规律如图3所示).图中,H表示x轴至水平轨迹段的距离,则为竖直轨迹段高度.3.1 优化模型为了提高电池分选效率,需在满足一定的约束条件下(如关节速度、加速度及其变化率和转矩),使机械手完成抓放操作所需的时间最短.为此,构造目标函数为约束条件如下所述.1)速度约束2)加速度约束3)加速度变化率(Jerk)约束4)转矩约束式中:且,和分别为主动关节的许用角速度、角加速度及变化率和转矩,它们可由所选伺服电机和减速器的特性参数确定.显然,该问题可归结为在满足给定约束条件下,合理调整相邻插补节点间的时间间隔,使总时间最小的问题.式中:3.2 非可行点向可行点的转化在优化过程中,为避免非可行点影响优化过程,需将非可行点转化成为可行点.为此,可考虑采用Feasible Solution Conversion方法,简称FSC法[9].定义调整系数为,.若,则该点为可行点,无需转化;若,则应将增至,以使其成为可行点.3.3 复合型优化算法为了求解上述优化问题,考虑采用复合型法,为了提高收敛速度,需要合理地构造n个初始顶点.和的计算式为则复合型的第1个顶点的计算式为并用 FSC方法使其成为可行点.其余1n−个顶点可用的计算式为在此,可根据参考文献[15]选择距离参数D,其大小将决定初始复合型的大小和算法的收敛速度.同样地,将新得到的个顶点经 FSC方法转化为可行点连同第一个顶点作为初始复合型的顶点,以局部最优点到各顶点的距离和两相邻局部最优点的距离为迭代终止条件实施复合型优化算法,最后可得一组最优的时间间隔,算法详细过程参见文献[9].图4示出了用Diamond机械手构建的高性能锂离子电池自动分选装备,采用2台Diamond800机械手同时分选同一托盘电池,并根据电池的类别将其分别放置在托盘两侧的传送带上不同的磁道上.该机械手的尺度参数和动力学参数参见表1和表2.图 5为点O′在电池抓放过程中的理想运动轨迹.图中为电池提升最大高度,为提升竖直段高度,为释放下降高度,为下降竖直段高度,S为水平段长度.根据实际需要确定轨迹精度,见表3.参见图 3(a)和图 5,当水平段长度最大时,段满足轨迹精度的最大节点间距约为 220 mm,故需在和节点间均匀设置点和点.参照图 3(b)和图 5,段满足轨迹精度的最大节点间距可达100 mm,但为了保证使轨迹严格经过点,在和间增设一浮动点.又考虑到释放段足够短,且对轨迹精度要求不高,故无须再增设浮动点.据此,根据机构尺度参数,由位置逆解模型可计算出两主动臂在实现最大水平距离抓放操作时的位置角点序(见表4).Diamond800机械手主动臂和从动臂均采用碳纤维制作,并选用型号为GYG152CC2的富士伺服电机,配以1∶10行星齿轮减速器,由此得到的动力学参数见表 2.根据伺服电机特性确定的关节约束条件见表 5.根据上述约束条件,由式(12)可得到初始时间间隔序列(单位:ms)为由此经 FSC法可得到复合型的第 1个可行顶点.选择D为10,则可由式(13)和FSC法得到复合型的其他8个初始顶点.给定迭代终止条件,采用复合型法得到的最优时间间隔迭代序列(见表6);对应最优解的关节角加速度变化率 J、角加速度θ˙˙、角速度θ˙、力矩τ随时间t的变化曲线和动平台的运动轨迹如图6所示.由图6可见,操作空间轨迹误差在要求的范围内,且两关节的加速度变化率、加速度、速度和力矩峰值均达到或接近约束值,这说明充分发挥了机械手的性能.实验结果表明:Diamond机械手最远单程实际运动时间为0.21 s,最近单程实际运动时间为 0.13 s.考虑到电池类别随机分布、气动系统与托盘步进耗时等因素,单台机械手电池分选效率可达100 次/min.上述研究成果已在某公司的锂电池分选工作站得到成功应用.针对 Diamond高速并联机械手分选电池操作要求,提出了依据操作空间轨迹误差要求选择插补节点间距的方法,为合理选择主动关节位置节点序列提供了理论依据.综合考虑关节力矩、关节速度、关节加速度及其变化率等约束条件,采用复合型算法优化得到了时间最优轨迹.理论分析和实际应用结果表明本文提出的理论与方法是有效的.[1] Clavel R. Device for the Movement and Positioning of an Element inSpace:US, US Patent 4976582[P]. 1990.[2] Pierrot F, Marquet F, Company O, et al. H4 parallel robot: Modeling, design, and preliminary experiments[C]// 2001 IEEE International Conference on Robotics and Automation. Seoul, Korea, 2001:3256-3261. [3] Pierrot F, Dauchez P, Fournier A. HEXA:A fast six-DOF fully-parallel robot[C]//Fifth International Conference on Advanced Robotics. Montpellier, France, 1991:1158-1163.[4] Huang T, Li Z X, Li M, et al. Planar parallel robot mechanism with two translational degrees of freedom:US, US Patent 7090458[P]. 2006. [5]张一巍, 张永民, 黄元庆. 用高阶多项式插值解决机器人运动轨迹规划中的约束问题[J]. 机器人技术与应用, 2002(2):19-21. Zhang Yiwei, Zhang Yongmin, Huang Yuanqing. Using high order polynomials interpolation to solve constraint problem of robot motion planning[J]. Robot Technique and Application, 2002(2):19-21(in Chinese).[6] Ozaki H, Lin C J. Optimal B-spline joint trajectory generation for collision-free movements of a manipulator under dynamic constraints[C]//Proceeding of the IEEE International Conference on Robotics and Automation. USA, 1996:3592-3597.[7] Ude A, Atkeson C G, Riley M. Planning of joint trajectories for humanoid robots using B-spline wavelets[J]. International Journal of Robotics and Automation, 2000, 3:24-28.[8]王幼民. 机器人关节空间 Bezier曲线轨迹优化设计[J]. 机械科学与技术, 2001, 20(3):350-352. Wang Youmin. Optimal design of Bezier curves trajectory in robot joint space[J]. Mechanical Science and Technology,2001, 20(3):350-352(in Chinese).[9] Lin C, Chang P, Luh J. Formulation and optimization of cubic polynomial joint trajectories for industrial robots[J]. IEEE Transactions on Automatic Control, 1983, 28(12):1066-1074.[10] Cao B, Doods G I, Irwin G W. Time-optimal and smooth constrained path planning for robot manipulators[C]// 1994 IEEE International Conference on Robotics and Automation. San Diego, USA, 1994:1853-1858.[11] Huang T, Li Z X, Li M, et al. Conceptual design and dimensional synthesis of a novel 2-DOF translational parallel robot for pick-and-place operations[J]. ASME Journal of Mechanical Design, 2004, 126(5):449-455.[12] Huang T, Li M, Li Z X, et al. Optimal kinematic design of 2-DOF parallel manipulators with well-shaped workspace bounded by a specified conditioning index[J]. IEEE Transactions on Robotics and Automation, 2004, 20(3):538-543.[13] Huang T, Mei J P, Li Z X. A method for estimating servomotor parameters of a parallel robot for rapid pick-andplace operations[J]. ASME Journal of Mechanical Design, 2005, 127(4):596-601.[14]刘文涛, 孟庆鑫, 王知行. 并联机床线性运动插补研究[J].中国机械工程, 2004, 15(1):27-29, 90. Liu Wentao, Meng Qingxin, Wang Zhixing. Research on linear motion interpolation of parallel machine tool[J]. China Mechanical Engineering, 2004, 15(1):27-29, 90(in Chinese).[15] Himmelblau D M. Applied Nonlinear Programming[M]. New York:McGraw-Hill, 1972:148-157.。
基于PLC的机械手自动分选大小球设计_毕业设计PPT

机械手分选大小球自动控制系统设计的实验过程
将PLC调到运行状态后,机械手首先自动向左向上运动,待碰到左 限位和上限位开关后停止(既原点位置),然后通过计数脉冲向右运行 到取物区位置(初始位置)停止。以上动作完成后,按下启动按钮一次 ,机械手连续运行"单步控制实验"中的动作,首先机械手下行至碰到货 物,如果下方放的是小球,则机械手能够碰到下限位开关,下行停止; 如果下方放的是大球,则机械手不能碰到下限位开关,则通过延时开关 使下行停止。然后电磁铁通电吸附铁球,然后机械手上行,碰到上限位 开关,上行停止,然后机械手右行,如果是大球则碰到大球的右限位开 关,右行停止;如果是小球则运行400个计数脉冲后右行停止。然后机 械手下行,机械手将球放到指定位置(大球放于大球右限位开关的正下 方;小球放于400个计数脉冲停止处的正下方)后,电磁铁停止通电,机 械手上行,上行至上限位开关后,上行停止,然后机械手左行,左行至 左限位开关后,左行停止,然后再重复执行上面的过程。当按下停止按 钮时,机械手并不立即停止运行,而是将货物放至货位处,释放钢球后 才停止。
PLC作为一种新型的工业控制器,它是以微处理器为核心,综 合计算机技术、自动控制技术和通信技术发展起来的一种新型 、通用的自动控制装置,具有结构简单、易于编程、性能优越、 可靠性高、灵活通用和使用方便等一系列优点。易于实现机电一 体化且非常适合在环境条件较恶劣下使用。
PLC的系统结构
PLC主要包括中央处理单元CPU、存储器RAM和ROM、输入输出接 口电路、电源、I/O扩展接口、外部设备接口等。其内部也是采用总线结 构来进行数据和指令的传输。
S0.0 SM0.0 M0.1 左行:Q0.0, 1 上行:Q0.2, 1 SM0.0
左限位:I1.0 左行:Q0.0, 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
23
TIANJ IN S CIENCE & TECHNOLOGY
P ART THREE:创新技术
天 2007.4
津 科 技
系统的结构、运动学和静、动态性能关于任务空间对称。 ②采用加强筋连接双内从动臂, 不但可有效地消除铰链 间隙, 而且在保证所需自由度的前提下便于装配及提高 垂 直 于 运 动 平 面 的 静 、动 刚 度 。 该 机 构 的 主 要 优 点 为 : 结 构轻 巧 新 颖、可 实 现 高速 运 动 , 便于 作 为 模块 独 立 使用 , 还 可与一单自由度进给机构串接构成 3 平动自由度混联机 械手。 2.2 Dia mond 机构 设 计 理论 与 关 键技 术 2.2.1 尺度综合与驱动器参数匹 配 技术 尺 度 综合 涉 及 在满足工程约束条件下, 确定构件尺度参数, 使得 Diam ond 机 构 在 其 工 作 空 间 内 性 能 最 优 。 为 此 提 出 一 种 以雅可比最小奇异值和单轴驱动力矩全域数字特征为性 能 指标 的 尺 度综 合 新 方法, 指 导 了 Diam ond 机 构 的 系 列 化设计。在此基础上, 建立了系统的刚体逆动力学模型, 并利用矩阵奇异值分解原理, 提出了一种伺服电机参数 的快速预估方法, 进而为驱动器参数匹配提供了重要的 理论依据。 2.2.2 动态设计技术 采用有限 元 法 建立 了 系 统的 弹 性 动力学模型, 并以单位质量所提供的低阶固有频率全域 均 值最 高 为 目标 实 现 了 Diam ond 机 构 运 动 构 件 截 面 参 数 的优化设计。同时采用铝合金和碳纤维制作运动部件, 实 现了轻量化设计, 有效地提高了系统的比刚度, 保证了高 速抓放操作时的优良动态特性。 2.2.3 精度设计、装配工艺与运 动 学 标定 技 术 建立 了 Diam ond 机 构 的 全 参 数 误 差 模 型 , 揭 示 出 影 响 末 端 执 行 器 可 控( 位 置) 和 不可 控( 姿 态) 精 度 的 误差 源 , 实 现了 机 构 铰链间隙圆和平行四边形对边误差的公差优化设计, 为 制定关键零部件的制造和装配工艺提供了重要的理论依 据。在建造过程中, 提出采用成组技术消除末端执行器非 可控误差的措施, 保证了机构的基础精度。针对该机构的 结构特点, 提出一种先辨识并补偿主动臂回零误差, 再识 别和补偿其他几何参数误差的运动学标定方法。以上研 究 有 效 提 高 了 机 构 的 几 何 精 度 , Diam ond 800 型 机 械 手 定位精度为 0.09 mm , 重复定位精度为 0.03 mm , 满足多 数抓取操作的实际需求。 2.2.4 轨迹规划与核心控制算法 轨 迹规 划 和 控制 器 参 数整 定 是 保证 Diam ond 机 构 在给 定 定 位精 度 下 实 现 高 速 抓放的重要技术手段。为此, 在考虑关节峰值力矩和峰值 转速等约束条件下, 提出一种直线 / 圆弧过渡和修正梯形 运 动规 律 的 轨迹 规 划 方法 。针 对 Diam ond 机 构 折 算 到 关 节空间惯性负载随位形变化的特点, 建立了机电耦合动 力学模型, 并提出一种控制器参数整定方法。上述措施在 保证定位精度的前提下有效地提高了抓取频次。 Diam ond 600 型 机 械 手 在 定 位 精 度 为 0.1 m m 时 的 抓 取 频次可达到 120 次 / 分。 2.3 延续创新 2.3.1 高性能锂电池分选装备 分 选 操作 是 锂 离子 电 池
2 创新点
收稿日期: 2007- 06- 1 5
该项目的总体研究目标和工作是: ①发明一种具有我 国自主知识产权的外副驱动 2 平动自由度高速并联机器 人机构, 实现原始创新, 并攻克其设计制造与控制技术; ② 以该高速并联机器人机构为核心, 开展延续创新。结合典 型行业需求, 发明并研制新型自动化装备, 并在工程中得 到应用。 2.1 Dia mond 机构 的 原始 创 新
a) 锂电池自动分选装备布局
b) 电池 分 选 装备 在 力 神公 司 应 用现 场 图 2 锂电池自动分选装备
a) 高速软袋装箱总体布局
24
TIANJ IN S CIENCE & TECHNOLOGY
P ART THREE:创新技术
2007.4Βιβλιοθήκη 天津科技
3 效益和应用前景
b) 高速 软 袋 装箱 一 体 机
De lta 机构 引 起了 学 术 界和 工 业 界的 普 遍 关 注 。 经 大 量 调 研 发 现 , 在 轻 工 、食 品 和 医 药 等 行 业 的 二 次 包 装 和 分 检操作中仅需机器人在一个平面内完成高速抓放操作, 而 在 与之 正 交 方向 做 长( 短) 距 步 进 运动 。例 如 , 电池 分 选 、瓶 装或袋装食品和药品的装箱操作均属于这种情形。然而, 在该项目立项时, 国际上尚无这类机器人的有关报道。
同时, 该公司与天津大学还合作发明并研制成功了集 开箱、放置隔板、装箱和封箱等功能于一体的基于 Diam ond 机 构 的“DJ 型 多 功 能高 速 软 袋装 箱 一 体机 ”新 产 品。
3.1 效益 ①该 项 目出 口 英 国 1 台 , 被 新 华社 、人 民 日报 、科 技 日
报 、中 央 电视 台 及 国内 60 多 家 门户 网 站 报导 , 认 为 是中 国 首台 整 机出 口 的 机器 人 。此 外, 浙 江 工 业大 学 、西 安交 通 大 学和 天 津 大学 等 先 后购 置 了 8 台 Diam ond 600 机 械 手 用于 教 学 和科 研 。② Diam ond 电池 分 选 装备 解 决 了力 神 公司分选瓶颈, 为企业新增产值 4 000 多万元。该套装备 2006 年 1 月入 选 国 家“十 五 ”科 技创 新 重 大成 就 展 。③首 次实现了并联机器人技术专利实施许可转让, 转让费 200 万元。所开发的高速软袋装箱设备填补了我国的空白, 并 在 制药 企 业 得到 应 用 。④2007 年 1 月 , 世 界著 名 包 装设 备 供 应商 德 国 Elau AG 公司 与 天 津大 学 签 订框 架 协 议, 长 期 购 买 Diam ond 机 械 手 用于 该 公 司包 装 设 备。⑤该 项 目 2004 年 9 月通过国家 863 专家组验收, 并于 2006 年获 得天津市技术发明一等奖。 3.2 应用前景
图 1 Dia mond 机 构 结构 学 原 理 该 项 目 发 明 的 高 速 并 联 机 器 人 机 构 — ——Diam ond 机 构 如图 1 所 示 。该机 构 由 基座 、动 平 台, 以 及 两 条结 构 完 全 相同的分支运动链组成, 每条支链中包含两组与肘关节相 连的平行四边形结构。各运动部件采用铰接连接, 并用外 转动副驱动。在安装于基座上的伺服电机驱动下, 利用平 行四边形的姿态保持性将 2 个主动臂的独立转动转换为 动平台的二维平动。该发明的特点在于: ①在其中一条支 链中引入了由连架从动臂和外从动臂构成的虚约束, 使得
该项 目 研制 的 高 速软 袋 装 箱机 集 开 箱、放 置 隔 板、装 箱 、封 箱等 操 作 于一 体 , 售 价 100 万 元 , 国 内无 类 似 产品 。 而德国 Bradm an Lake Group 的装箱机采用 ABB 的 IRB340 Fle xPicke r 机械 手 , 售 价 200 万 元 以 上, 且 需 另 配 开箱和封箱设备, 系统集成后占地面积大。
TIANJ IN S CIENCE & TECHNOLOGY
梅江平 ( 天津大学机械工程学院 天津 300073)
P ART THREE:创新技术
2007.4
天
津
科
技
Dia m o n d 高速并联机械手
【摘 要】为了突破 Delta 机构的知识产权, 为我国相关行业提供具有国际竞争力的核心 装备, 天津大学在 国内率先开展了高速抓放操作用高速并联机器人的创新设计与关键技术研究, 实现了 1 项 Diamond 机构 原始发明创新和 2 项延续发明创新, 即电池分选装备和软袋装箱设备, 项目取得了显著效益且应用前景 广泛。 【关键词】Diamond 高速并联机器人 机械手
1 背景和研究意义
在电 子 、轻工 、食 品 和医 药 等 行业 中 , 通 常 需 要 以 很 高 的 速 度完 成 插 装、封 装 、包 装、分 检 等 操作 。 为 了 提 高 生 产 率, 上述操作需要借助机械手来完成。外转动副驱动的并 联机器人可使末端执行器获得极高的速度。
目前, 世界上最具代表性的高速抓放并联机器人当属 Clave l 发 明的 被 Bos ch 和 ABB 两大 国 际 自动 化 装 备制 造 商 实 现 产 业 化 3 平 动 自 由 度 De lta 机 构 。 据 不 完 全 统 计 , De lta 机构 在 欧 洲和 北 美 的食 品 、包 装、物 流 等 行 业 装 机 量 已近千台。
c) 装箱 机 在 北京 双 鹤 药业 应 用 现场 图 3 装箱设备
2.3.2 高速 多 功 能软 袋 装 箱 机 非 PVC 复 合 膜 软 包 装 是 药 液 包装 的 重 要发 展 趋 势 , 其 二 次 包 装 包 括 套 袋 、开 箱 、装 箱 、封 箱 、码 垛 等 5 个 环 节 , 其 中 装 箱 操 作 是 当 前 瓶 颈 问 题 。目 前, 我 国 除 少数 制 药 企业 进 口 昂贵 的 国 外设 备 外 , 普 遍采用手工装箱操作, 容易产生污染, 存在药品安全隐患。 为此, 2006 年 1 月江阴纳尔捷包装设备有限公司 购买 了 天 津 大 学 Diam ond 机 构 专 利 实 施 许 可 , 与 天 津 大 学 合 作 , 发 明 并研 制 成 功了 一 种 基于 Diam ond1000 型 机 械 手 的 多 功 能 高 速 软 袋 装 箱 机 , 实 现 了 0.1 ~0.5 kg 液 体 软 袋 的 80 m g/L 的 高 速装 箱 操 作。该 装 备 已在 北 京 双鹤 药 业 股份 有限公司的葡萄糖输液软袋自动化生产线上投入使用。