智能汽车控制策略及PID算法分析
PID及模糊控制算法
第3章 智能汽车设计基础—软件
第3章 智能汽车设计基础—软件
1 3.1 编程语言简介
2 3.2 控制算法
3
思考题
3.1 编程语言简介
1
3.2.1 PID控制算法
2
3.2.2 模糊控制算法
3
3.2.3 其它智能 控制算法
图3.1 常规PID控制系统原理框图
r(t)
u(k
)
Kp
e(k
)
T Ti
j
k 0
e(
j
)
Td T
[e(k
)
e(k
1)]
(3.11)
期T与式被中控,对u(象k)时为间第常数k 比个较采相样对时较刻小的,控那制么量这。种如近果似采是样合周
理的,并与连续控制的效果接近。
模拟调节器很难实现理想的微分
,而利用计算
3.2.1 PID控制算法
图3.6 增量型算法流程图
3.2.2 模糊控制算法
•可编辑
3.2.2 模糊控制算法
图3.7 模糊控制基本结构图
3.2.2 模糊控制算法
3.2.2 模糊控制算法
(2)描述输入、输出变量的词汇
在模糊控制中,输入、输出变量大小是以语言形式描述的,因 此要选择描述这些变量的词汇。我们的日常语言中对各种事物和变量 的描述,总是习惯于分为三个等级,例如,物体的大小分为大、中、 小;运动的速度分为快、中、慢;年龄的大小分为老、中、青。实际 应用中一般都选用“大、中、小”三个词汇来描述模糊控制器的输入、 输出变量的状态,再加上正、负两个方向和零状态,共有7个词汇,即
e(k )
基于LQR的智能驾驶汽车横纵向控制研究

基于LQR的智能驾驶汽车横纵向控制研究
高爱云;肖寒;付主木
【期刊名称】《河南科技大学学报(自然科学版)》
【年(卷),期】2024(45)2
【摘要】为了提高智能驾驶汽车跟踪控制器的稳定性和跟踪精度,提出了一种基于线性二次型调节器(LQR)控制算法和驾驶员预瞄模型的横向跟踪控制策略,结合纵向比例-积分-微分(PID)控制算法实现横纵向控制。
首先建立带有前馈的LQR控制器,采用梯度下降优化算法优化LQR控制器权重参数,并在此基础上引入驾驶员预瞄模型,设计了基于经验的预瞄距离自适应控制器;其次建立双PID纵向控制器进行速度控制。
最后通过Carsim和Matlab/Simulink联合仿真以及实车测试验证,结果表明:仿真工况下最大横向偏差小于0.035 m,最大航向偏差小于0.09 rad,实车测试工况下也能够良好遵循规划轨迹的整体趋势,速度跟踪效果良好且前轮转角与横摆角速度变化平稳。
因此,该控制器能够保证较高精度且平稳的轨迹跟踪,在高速状态下更为明显。
【总页数】17页(P30-43)
【作者】高爱云;肖寒;付主木
【作者单位】河南科技大学车辆与交通工程学院;河南科技大学信息工程学院【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于模型预测控制的无人驾驶汽车横纵向运动控制
2.基于模型预测控制的智能车横纵向控制器设计
3.连续工况下基于PID+LQR算法的自动驾驶车辆横纵向耦合控制
4.基于横纵向综合控制的智能汽车路径跟踪
5.基于模型预测控制的智能车辆横纵向综合控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
智能车路径识别及控制策略的研究

21 0 2年 7月
机床与液压
MACHI NE OOL & HYDRAUL CS T I
J 12 2 u . 01
Vo . 0 No 1 14 . 3
第4 O卷 第 l 期 3
DO :1 . 9 9 jis. 0 1—3 பைடு நூலகம் . 0 2 1 . 2 I 0 3 6 /.sn 10 8 1 2 1. 3 0 5
og iin. Thef z y ag rt m n he fl rng p o e sn r do e ofnd t t sto d dr ci n. Th n to u z lo h a d t ti r c s i gwe ea ptd t i i e i hepah po iin a ie to n e PD o to tae y c n r lsr tg
硬件设计包括信号调理 电路 、电源和电机驱动的设计等 。实验结果证 明,按该 方案设计 的智 能车 能够快速稳定运行 。 关键词 :智能车 ;激光传感器 ;路径识别 ;模糊算法 ;控制策略
PID算法在智能车方向控制中的应用
PID算法在智能车方向控制中的应用智能车是指能够感知、分析、决策和执行动作的汽车。
它可以通过集成传感器、图像识别、机器学习和控制算法来实现自主导航和安全驾驶。
在智能车的控制系统中,方向控制是一个重要的组成部分。
PID算法是智能车方向控制中常用的一种算法,它能够通过实时调整车辆转向角度来实现车辆的精确控制。
PID算法是一种反馈控制算法,它通过不断地对系统输出与期望输出的差异进行检测和调整,以实现控制系统的稳定。
PID算法由比例控制、积分控制和微分控制三个部分组成。
比例控制部分根据系统输出与期望输出的差异进行比例调整,积分控制部分根据系统输出与期望输出的累积差异进行积分调整,微分控制部分根据系统输出与期望输出的变化速率进行微分调整。
这三个部分共同作用,通过实时调整控制信号来达到期望输出。
在智能车的方向控制中,PID算法可以通过以下步骤应用:1.传感器数据获取:智能车通常配备了多种传感器,如惯性传感器、陀螺仪和激光雷达等,用于感知车辆的运动状态和周围环境。
PID算法需要读取传感器数据作为反馈信号。
2.设置期望输出:根据预定的路线或目标,可以设置一个期望的转向角度作为系统的期望输出。
3.计算误差:将传感器数据中获取的实际转向角度与期望转向角度进行比较,计算得出误差。
误差可以表示为实际转向角度减去期望转向角度的差异。
4.比例控制:根据误差的大小,比例控制部分会调整控制信号的大小,从而影响车辆的转向角度。
比例系数越大,车辆的响应速度越快,但可能会引起过冲或震荡现象。
5.积分控制:积分控制部分会通过累积误差来调整控制信号,从而消除系统的稳态误差。
积分系数越大,车辆的稳定性越好,但可能会引起过冲现象。
6.微分控制:微分控制部分会通过测量误差的变化率来调整控制信号,从而降低车辆的震荡现象。
微分系数越大,车辆的稳定性越好,但可能会引起过度补偿。
7.发送控制信号:根据比例控制、积分控制和微分控制的结果,生成控制信号并发送给车辆的转向系统,从而实现转向角度的调整。
智能车辆感知与控制技术研究

智能车辆感知与控制技术研究随着科技的不断发展,智能车辆成为未来交通的重要发展方向。
智能车辆通过感知环境和控制行为来实现自主驾驶,并将具有更高的安全性、效率和舒适性。
智能车辆感知与控制技术是实现自动驾驶的核心,本文将探讨该技术的研究进展、挑战和未来发展。
一、智能车辆感知技术1.传感器技术传感器是智能车辆感知环境的重要工具。
目前,常用的传感器主要包括摄像头、雷达、激光雷达和超声波传感器。
摄像头能够获取图像信息,通过图像处理算法实现障碍物检测、车道识别等功能;雷达和激光雷达能够精确测量物体的位置和速度;超声波传感器主要用于近距离的障碍物检测。
传感器技术的不断创新将进一步提高车辆对环境的感知能力。
2.计算机视觉技术计算机视觉技术在智能车辆感知中发挥着重要的作用。
通过对摄像头获取的图像进行分析和处理,可以实现车辆的目标检测、车道检测、行人识别等功能。
其中,深度学习算法的应用使得计算机视觉技术取得了巨大的进步,能够更准确地检测和识别目标。
3.环境建模与定位智能车辆需要对周围环境进行建模和定位,以保证车辆行驶的安全和可靠性。
环境建模通过将感知到的环境信息进行抽象和表示,构建地图等模型。
定位技术则用于确定车辆在地图中的位置。
其中,Simultaneous Localization and Mapping(SLAM)算法被广泛应用于智能车辆的环境建模和定位任务。
二、智能车辆控制技术1.路径规划与决策智能车辆的路径规划决策是实现自动驾驶的关键。
路径规划算法通过分析环境信息和目标,确定最优的路径。
决策算法则根据当前环境和交通情况,做出相应的驾驶决策。
同时,智能车辆还需要实时更新路径和决策,以应对动态变化的道路和交通状况。
2.控制与执行智能车辆的控制与执行是将决策转化为实际行动的过程。
控制算法通过调节车辆的转向、加速和刹车等动作,实现车辆的精确控制。
常用的控制算法包括Proportional-Integral-Derivative(PID)控制和模型预测控制等。
简述智能汽车自动驾驶的控制方法

简述智能汽车自动驾驶的控制方法本文将针对智能汽车自动驾驶的控制方法进行简要分析和探究,旨在有效提升汽车自动驾驶技术的应用效果,为智能汽车创造更加广阔的发展空间。
标签:智能汽车;自动驾驶;控制方法引言随着人们生活水平的不断提升,对于出行工具的选择提出了更高的要求。
现代科学技术的发展使得越来越多的智能汽车被广泛应用于人们的日常生活,而自动驾驶技术的应用与发展更加提升了智能汽车的使用性能。
通过智能汽车自动驾驶的控制系统能够有效满足智能汽车自动驾驶的需求,明确自动驾驶控制的方法,并在仿真验证分析中,有效提升智能汽车自动控制的效果,提高汽车自动驾驶的水平。
1 智能汽车自动驾驶车辆控制模型的构建在对智能汽车自动驾驶系统监督的过程中,系统的控制运行中转向和转角与对车辆的控制存在一定关系,因此,要想提升汽车运行控制的监督质量,需要在建立智能汽车自动驾驶系统控制模型的过程中,根据道路行车的实际控制情况、汽车方向盘转角的控制和汽车间距的控制构建模型。
接下来,根据智能汽车自动驾驶控制的实际需求,根据大地坐标系将整个汽车驾驶控制中的坐标体系模型进行构建,并对坐标系的控制数据模型进行适当调整,确保在对模型的控制与调整工作中有效提升对智能汽车自动驾驶控制系统的控制效果。
在对系统描述功能进行控制的过程中,能够对智能汽车自动驾驶控制系统进行监督。
根据图1可看出,在构建数据模型时,严格根据汽车仿真系统的构建要求,对汽车自动驾驶控制系统控制中的数据和模型做出了有效调整,并根据智能汽车自动驾驶控制的实际需求,开展车辆自动驾驶控制中的行驶模型的设计工作,同时,对汽车自动驾驶系统控制的过程中,对汽车的控制状况、道路情况以及仿真信息进行全面分析,确保在智能汽车自动驾驶的过程中,使汽车对前方路况的监督状态以及系统的控制反馈为一个整体,并通过调节汽车的反馈系统对汽车的智能化监督控制体系进行相应调整,进而提升对整个车辆的自动控制效果。
2 智能汽车自动驾驶车辆道路状况的识别在智能汽车自动驾驶过程中,需要明确掌握前方道路的具体情况,因此,需要通过对道路状况信息的处理与识别,确保汽车运行的安全性和稳定性。
汽车PID巡航系统控制策略浅析

汽车PID巡航系统控制策略浅析本文介绍了汽车巡航的功能,组成,作用和原理,分析了其中的传感器,控制器,执行机构的工作原理;通过对比PID控制,模糊控制,迭代学习控制和自适应控制的工作特点,分析了各种巡航控制策略的优劣。
标签:巡航;控制;PID0 引言汽车巡航控制是当下汽车发展中正在普及的一项技术,这项技术在汽车长途行驶中降低驾驶员疲劳驾驶,降低一些外在因素而发生的事故。
但是汽车巡航控制系统并没有发展完善,很多问题伴随驾驶員驾驶汽车时而产生。
巡航制控系统(Cruise Control System)简称CCS(车辆速度控制系统),是指在驾驶员不需要踩油门通过巡航控制器设置一个特定的车速而使行驶车辆车速不断在接近设定车速限制内行驶的控制装置[1]。
驾驶汽车在高速公路上行驶,虽然外界因素相对稳定,但驾驶时间长了还是需要适当的更改汽车行驶速度,长时间驾驶车辆对人各方面都会有一定的影响,容易出现不利于驾驶的因素产生,因此在汽车上安装巡航系统。
汽车巡航问世之后也伴随着一些问题的出现,比方巡航系统打开无法关闭,巡航系统在不同操作系统下的关闭方法不同。
在技术上也有一定的进步例如从以前单方面的让车保持一种车速下行驶到现在跟车定速等。
不管从巡航系统的不足到问题的分析还是从巡航系统的技术升级,我们都应该对汽车巡航系统控制系统进行分析,从而加强对技术的学习与研究深度,提升分析和解决问题的能力。
1 巡航系统发展方向进入21世纪以来,由于汽车电子元件越来越普遍地应用在汽车上以及各地公路、高速公路的不断发展,使得定速巡航系统已经逐步变得成熟,系统的电路以及布线有了很大的进步,控制部分更加快捷与精确,多路传送系统的技术变得更加成熟,故障自动报警系统发展得更加精准[2]。
总体看来,巡航系统的发展方向具体有以下几点:1.1 先进控制方法的引进车辆在行驶过程中的实际工况是很复杂的,它主要受到车载人员的人数、发动机的当前状况等因素的影响,驾驶员对舒适性的要求更高了,引入新技术的巡航控制系统在以传统的控制原理为基础,又引入不少先进的控制理论,目前,PID 控制,自适应控制和模糊控制等原理先后被研发使用[3]。
纯电动汽车自动驾驶功能设计
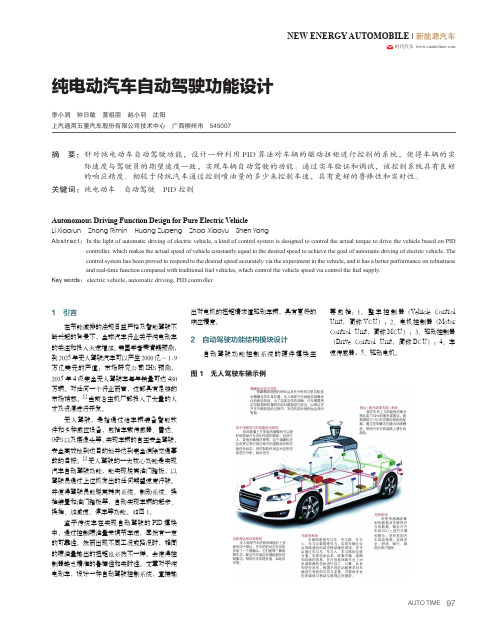
AUTO TIME97NEW ENERGY AUTOMOBILE | 新能源汽车时代汽车 纯电动汽车自动驾驶功能设计李小润 钟日敏 黄祖朋 赵小羽 沈阳上汽通用五菱汽车股份有限公司技术中心 广西柳州市 545007摘 要: 针对纯电动车自动驾驶功能,设计一种利用PID 算法对车辆的驱动扭矩进行控制的系统,使得车辆的实际速度与驾驶员的期望速度一致,实现车辆自动驾驶的功能。
通过实车验证和调试,该控制系统具有良好的响应精度。
相较于传统汽车通过控制喷油量的多少来控制车速,具有更好的鲁棒性和实时性。
关键词:纯电动车 自动驾驶 PID 控制1 引言在节能减排的法规日益严格及智能驾驶不断兴起的背景下,全球汽车行业关于纯电动车的关注和投入火速增加。
美国学者麦肯锡预测,到2025年无人驾驶汽车可以产生2000亿~1.9万亿美元的产值;市场研究公司IHS 预测, 2035年4级完全无人驾驶车每年销量可达480万辆。
对任何一个行业而言,这都具有足够的市场诱惑。
[1]当前各主机厂都投入了大量的人才及资源进行开发。
无人驾驶,是指通过给车辆装备智能软件和多种感应设备,包括车载传感器、雷达、GPS 以及摄像头等,实现车辆的自主安全驾驶,安全高效地到达目的地并达到完全消除交通事故的目标。
[2]无人驾驶的一大核心功能是实现汽车自动驾驶功能,能实现脱离油门踏板,以驾驶员通过上位机发出的任何期望速度行驶。
并使得驾驶员能脱离转向系统、制动系统、换挡装置和油门踏板等,自动实现车辆的起步、换挡、加减速、停车等功能。
如图1。
鉴于传统车在实现自动驾驶的PID 模块中,通过控制喷油量来调节车速,固然有一定的可靠性。
然而出现不同工况或路况时,相同的喷油量输出的扭矩也必然不一样。
会使得控制器缺乏精准的鲁棒性和实时性。
文章对于纯电动车,设计一种自动驾驶控制系统,直接输出对电机的扭矩请求值驱动车辆,具有更好的响应精度。
2 自动驾驶功能结构模块设计自动驾驶功能控制系统的硬件模块主要包括:1、整车控制器(Vehicle Control Unit,简称VCU);2、电机控制器(Motor Control Unit,简称MCU);3、驱动控制器(Drive Control Unit,简称DCU);4、车速传感器;5、驱动电机。
PID控制以及汽车控制的应用

未来展望
随着智能控制技术的发展,PID控制算法将与人工智能、机器 学习等技术相结合,实现更加智能化和自适应的控制策略。
未来研究方向包括发展新型PID控制算法、提高控制精度和鲁 棒性、以及探索多目标优化和控制等问题。同时,也需要加 强基础理论和实验研究,推动汽车控制技术的不断创新和发 展。
THANKS
在汽车控制中,PID控制算法广泛应用于发动机控制、底盘控制和车身控制等领域,对提高汽车的动力 性、经济性和舒适性具有重要意义。
实际应用与挑战
Hale Waihona Puke 在实际应用中,PID控制算法需要根 据具体的汽车系统和工况进行参数调 整和优化,以适应不同的行驶条件和 性能要求。
挑战主要来自于系统非线性和不确定 性,以及复杂的行驶环境和多变的驾 驶员意图。为了实现更好的控制效果 ,需要深入研究系统动态特性和驾驶 员行为特征。
控制精度与鲁棒性
控制精度
PID控制器在汽车控制中需要高精度 的控制效果,以满足汽车运行的安全 性和稳定性。
鲁棒性
由于汽车运行环境复杂多变,PID控制 器需要具备良好的鲁棒性,以应对各 种干扰和不确定性。
实时性要求
快速响应
汽车控制需要快速响应,以应对突发情况, PID控制器需要具备高效的计算能力和优化 算法,以满足实时性要求。
详细描述
通过传感器检测车辆的横摆角速度和侧向加速度,PID控制器计算期望横摆力矩并与实际横摆力矩进 行比较,产生一个附加横摆力矩,通过制动系统施加到内侧车轮上,使车辆保持稳定。PID控制器能 够根据车辆的动态响应实时调整附加横摆力矩,提高车辆的操控性和稳定性。
自动泊车系统
总结词
自动泊车系统是利用PID控制算法实现自 动寻找停车位和自动泊车的智能化系统 。
《2024年轮毂电机驱动电动汽车联合制动的模糊自整定PID控制方法研究》范文
《轮毂电机驱动电动汽车联合制动的模糊自整定PID控制方法研究》篇一一、引言随着科技的不断进步,电动汽车的研发和应用日益广泛。
在电动汽车的驱动与制动系统中,轮毂电机驱动技术以其高效率、低噪音和低成本等优势备受关注。
为了进一步优化电动汽车的制动性能和稳定性,本文将针对轮毂电机驱动电动汽车联合制动的模糊自整定PID控制方法进行深入研究。
二、背景与现状分析电动汽车的制动系统在行驶过程中扮演着至关重要的角色,它不仅影响车辆的制动性能,还直接关系到行车安全。
传统的PID控制方法在电动汽车的制动控制中得到了广泛应用,但其在处理非线性、时变和不确定性的系统时,往往难以达到理想的控制效果。
近年来,模糊控制技术因其对复杂系统的良好适应性,逐渐成为研究热点。
因此,将模糊控制与PID控制相结合,形成模糊自整定PID控制方法,成为提高电动汽车制动性能的重要途径。
三、轮毂电机驱动电动汽车联合制动系统轮毂电机驱动电动汽车的联合制动系统由多个轮毂电机组成,通过控制各个电机的制动力,实现车辆的稳定制动。
该系统具有结构简单、制动力分配灵活等优点,但同时也面临着非线性、时变和不确定性等问题。
为了解决这些问题,本文提出了一种模糊自整定PID控制方法。
四、模糊自整定PID控制方法1. 模糊控制原理:模糊控制是一种基于模糊集合理论的控制方法,它通过模拟人的思维过程,对复杂系统进行近似处理。
在本文中,我们利用模糊控制器对PID控制的参数进行在线调整,以适应系统的非线性、时变和不确定性。
2. 参数自整定:根据系统的实际运行状态,模糊控制器对PID控制的参数进行实时调整。
通过不断地调整PID参数,使系统达到最优的控制效果。
3. 控制策略:在轮毂电机驱动电动汽车的联合制动系统中,我们采用模糊自整定PID控制方法对制动力进行分配和控制。
具体而言,我们根据车辆的行驶状态、路面情况等因素,利用模糊控制器对PID参数进行调整,以实现制动力的大化利用和车辆的稳定制动。
恩智浦杯全国智能车竞赛之PID调节
恩智浦杯全国智能车竞赛之PID调节1. 引言1.1 恩智浦杯全国智能车竞赛概述恩智浦杯全国智能车竞赛是由恩智浦公司主办的一项旨在促进智能车技术发展和创新的比赛。
该比赛旨在鼓励参赛队伍利用智能控制技术和自动化技术,设计和制作能够自主行驶的智能汽车。
参赛队伍需要通过编程和算法优化,使智能车在指定赛道上完成各项任务,如避障、定位、停车等。
恩智浦杯全国智能车竞赛吸引了来自全国各地高校、研究机构和企业的精英人才参与,为智能车技术的研究和应用提供了一个广泛交流和展示的平台。
通过比赛,参赛队伍可以展示他们的创新能力和技术水平,与同行学习交流,促进技术进步和产业发展。
恩智浦杯全国智能车竞赛不仅是一场技术比拼,更是一场智慧与创新的盛会。
希望通过该比赛的举办,推动智能车技术的发展,促进行业合作与交流,为智能交通和自动驾驶技术的推广和应用做出贡献。
1.2 PID控制算法简介PID控制算法(Proportional-Integral-Derivative Control)是一种经典的控制算法,广泛应用于工业控制领域。
它通过比较目标值与实际值之间的差异来调节控制器的输出,实现系统的稳定性和准确性。
PID控制算法由三部分组成:比例控制部分(P)、积分控制部分(I)和微分控制部分(D)。
比例控制部分通过调节输出的幅度来消除偏差;积分控制部分通过累积误差来消除系统的静态误差;微分控制部分通过检测误差变化的速度来消除系统的动态误差。
在智能车竞赛中,PID控制算法被广泛应用于控制车辆的速度和方向,确保车辆能够在赛道上稳定行驶并达到最佳效果。
通过调节PID 参数,可以使得车辆在不同的路况下具有更好的适应性和响应性。
PID控制算法是一种简单而有效的控制方法,能够应用于各种不同的系统和场景中。
在智能车竞赛中,合理地使用PID控制算法可以提升车辆的性能和竞争力。
2. 正文2.1 PID控制算法在智能车竞赛中的应用PID控制算法是智能车竞赛中常用的控制策略之一,它通过不断地调整车辆的速度和方向,使得智能车能够准确地跟踪赛道并完成赛道规划。
智能车项目实验报告(3篇)
第1篇一、项目背景随着科技的飞速发展,智能车技术已成为现代交通运输领域的重要研究方向。
本项目旨在设计和实现一款具备自主导航、避障和路径规划功能的智能车,以提高交通运输的效率和安全性。
通过本项目的研究与实验,旨在探索智能车技术在实际应用中的可行性和有效性。
二、项目目标1. 设计并实现一款具备自主导航、避障和路径规划功能的智能车;2. 评估智能车在不同复杂环境下的性能和稳定性;3. 探索智能车在现实场景中的应用前景。
三、实验内容1. 硬件平台搭建本项目选用STM32单片机作为核心控制器,搭载激光雷达、毫米波雷达、摄像头等传感器,以及电机驱动模块和无线通信模块。
具体硬件配置如下:- 单片机:STM32F103C8T6- 传感器:激光雷达、毫米波雷达、摄像头- 电机驱动:L298N- 无线通信模块:蓝牙模块2. 软件平台开发本项目采用C语言进行软件开发,主要包括以下模块:- 控制模块:负责处理传感器数据,实现避障、路径规划和导航等功能;- 传感器数据处理模块:对激光雷达、毫米波雷达和摄像头等传感器数据进行处理和分析;- 电机驱动模块:控制电机驱动模块,实现智能车的运动控制;- 无线通信模块:实现与上位机或其他设备的通信。
3. 实验步骤(1)环境搭建:搭建实验场地,布置激光雷达、毫米波雷达、摄像头等传感器,并连接单片机。
(2)传感器标定:对激光雷达、毫米波雷达和摄像头等传感器进行标定,确保数据准确。
(3)编程实现:编写控制模块、传感器数据处理模块、电机驱动模块和无线通信模块等程序。
(4)调试与优化:对智能车进行调试,优化各项功能,提高性能和稳定性。
(5)测试与评估:在不同复杂环境下对智能车进行测试,评估其性能和稳定性。
四、实验结果与分析1. 避障功能在实验过程中,智能车能够有效识别和避开障碍物,包括静态和动态障碍物。
避障效果如下:- 静态障碍物:智能车能够准确识别并避开障碍物,如树木、电线杆等;- 动态障碍物:智能车能够识别并避开行人、自行车等动态障碍物。
基于AT89S52单片机及PID算法实现循迹避障功能的智能小车【毕业论文,绝对精品】
Abstract
This paper introduced an kind ofintelligent car that use AT89S52 SCM as control core , combine with multiple sensors and PIDcontrolalgorithmto achieve the function that find track and avoid obstacles.the electrical car uses reflective photoelectric sensor to detect black line to achieve track-finding,uses ultrasonic sensors to detect obstacles on the road to avoid obstacles automatically.The entire system has the function that trace route automatically,find light and test speed.Among them, AT89S52 which has 8-bit single-chip is used as the control part.Because of useing easily and having multi-function ,it suffers large users. The motor driver uses the common way--PWM for the motor controlling speed. the speed of car is displayed by the LCD screen .The circuit structure of the whole system is relatively simple, high reliability, and it can meet the requirements of the various design.With the continuous improvement of high technology and the stead process in industrial automation in our country,the Intelligence-car which gradually access to people's attention has been widely applied to design a variety of toys and other products,which greatly enriched people's lives.
智慧汽车自动化系统设计方案
智慧汽车自动化系统设计方案智能汽车自动化系统是指将先进的人工智能技术应用于汽车中,实现车辆的智能驾驶、智能感知和智能决策等功能。
下面给出一个智能汽车自动化系统的设计方案。
1. 系统架构智能汽车自动化系统的架构主要包括感知模块、决策模块和控制模块三个部分。
感知模块:该模块通过激光雷达、摄像头、超声波传感器等器件实时感知车辆周围的情况,包括道路、障碍物、行人等。
感知模块收集到的数据会被传输到决策模块进行处理。
决策模块:该模块主要利用机器学习和深度学习等技术对感知模块传输的数据进行处理和分析,判断车辆当前的环境和状态,并做出相应的决策,比如车辆的速度、方向等。
决策模块的输出将传输到控制模块。
控制模块:该模块根据决策模块的输出,控制汽车的加速、制动、转向等操作,从而实现智能驾驶的功能。
2. 算法和技术(1)传感器融合算法:该算法通过将不同类型的传感器数据进行融合,提高车辆感知的准确性和鲁棒性。
比如通过激光雷达获取车辆周围的地物信息,通过摄像头获取图像信息,通过超声波传感器获取距离信息,然后通过融合算法将这些信息整合起来,提供更准确的感知结果。
(2)机器学习和深度学习算法:该算法用于决策模块,通过对大量的训练数据进行学习和训练,使系统能够根据感知模块传输的数据,判断当前的环境和状态,并做出相应的决策。
例如,利用卷积神经网络对图像数据进行特征提取和分类,帮助系统判断前方是否有障碍物。
(3)PID控制算法:该算法用于控制模块,通过调节车辆的加速、制动和转向等操作,实现智能驾驶的功能。
PID控制算法是一种经典的控制算法,通过根据误差的大小和变化趋势来调节控制参数,使系统能够快速、稳定地响应外部环境的变化。
3. 硬件设备智能汽车自动化系统的硬件设备包括激光雷达、摄像头、超声波传感器等感知设备,以及电脑、处理器、控制器等主控设备。
激光雷达:用于获取车辆周围的地物三维信息,可以精确测量物体的距离和形状等参数。
摄像头:用于获取车辆周围的图像信息,可以用于识别车辆、行人、交通标志等,提供更直观的感知结果。
pid计算公式
pid计算公式在现代的自动控制系统中,PID(比例-积分-微分)控制算法是一种基础的行为模式。
它的本质是将反馈信息和设定输入目标的结合,以调节受控系统的输出,以达到控制系统的预期目标。
PID控制算法利用三个不同的参数构建出一个算法:比例常数(Kp),积分常数(Ki)和微分常数(Kd),以实现PID控制算法。
1.义PIDPID控制算法是一种常见的控制算法,它基于不断补偿扰动,以达到稳定系统,通过不同参数设定调节系统行为,以达到不断输出受控系统的目标值。
PID控制算法是一种模型,利用三个参数的变化,即比例常数、积分常数和微分常数,来调整受控系统的输出,以实现系统的自动控制。
2. PID计算公式PID控制算法有三个不同的参数:比例常数Kp,微分常数Kd,积分常数Ki。
它们因系统响应特征而不同。
一般而言,PID控制公式可以表示为:PID=Kp(反馈减去目标) + Ki计偏差 + Kd差变化率其中,Kp是比例常数,也称为比例系数,指输出受偏差影响的程度,大小在0~1之间;Ki是积分常数,也称为积分系数,指用于衡量偏差的变化率;Kd是微分常数,也称为微分系数,指用于衡量变化率的变化率。
3. PID参数计算PID参数计算包括:比例常数计算、积分常数计算和微分常数计算。
比例常数Kp是系统控制变化系数,其值可以从预期反馈响应中估算;积分常数Ki是系统积分补偿系数,其值可以从预期偏差值中估算;微分常数Kd是系统微分限制系数,其值可以从预期时间响应中估算。
4.用案例PID控制算法应用于多种领域,其中网络带宽调度中的PID算法较为常见。
近年来,随着技术的发展,PID算法也被应用于自动驾驶中,是智能汽车实现自动驾驶的重要控制技术之一。
在自动驾驶汽车中,PID控制算法利用摄像头实时捕捉汽车前方车辆和障碍物,并利用PID控制算法对汽车的行驶速度和行驶路线进行实时控制,以确保汽车的安全行驶。
5.论PID控制算法是一种基础的行为模式,是自动控制中重要的一种控制方法。
计算机控制设计PID智能小车
计算机控制设计PID智能小车引言:在现代社会中,智能小车有着广泛的应用,例如自动驾驶汽车、无人机等。
其中,PID(Proportional-Integral-Derivative)控制是一种常见且有效的控制方法,可以使智能小车实现精确的轨迹跟踪和运动控制。
本文将介绍计算机控制设计PID智能小车的原理和实现方法。
一、PID控制原理PID控制是一种反馈控制方法,其基本原理是通过不断调整控制器的输出,使系统的实际输出与期望输出之间的误差不断减小,直到误差趋近于零为止。
PID控制器的输出是根据误差的大小和变化率来计算的,包括比例项、积分项和微分项。
1. 比例项(Proportional term):比例项与误差成正比,用来消除静态误差。
比例项越大,控制器的响应速度越快,但容易产生震荡。
2. 积分项(Integral term):积分项与误差的累积量成正比,用来消除积分误差。
积分项主要解决系统的静态稳态误差问题。
3. 微分项(Derivative term):微分项与误差的变化率成正比,用来消除误差的瞬时变化。
微分项主要解决系统的动态稳定性问题。
通过合理地调整比例、积分和微分的权重,可以得到一个稳定且响应速度较快的PID控制器。
二、实现PID控制的步骤1.确定系统模型:首先需要建立智能小车的数学模型,例如小车的动力学方程和传感器的响应特性。
系统模型的准确性对PID控制的性能有重要影响。
2.参数调整:选择合适的PID参数对系统进行调整。
一种常用的调整方法是试错法,通过不断调整参数,观察系统的响应,并根据实际需求进行优化。
3.实时控制:通过传感器获取实时数据,计算出误差,并根据PID控制算法调整输出。
通过实时调整控制器的输出,智能小车可以实现轨迹跟踪和运动控制。
4.系统稳定性:判断系统的稳定性,保证误差在可容忍的范围内,避免系统产生震荡或不稳定的情况。
三、具体实现步骤1.搭建硬件平台:搭建智能小车的硬件平台,包括电机、传感器、控制器等。
智能小车电机模糊PID控制 PPT
智能车调速系统的分析
小车要求达到的标准: (1)传感器检测到黑线在正中心时,判断当
前赛道为直线,此时小车应尽量升速,在保证稳 定的情况下使小车以最快的速度沿直线前行;
(2)传感器检测到的黑线在两旁是,判断当 前赛道的为弯道,此时转向舵机应作出相应的响 应,使小车转过一定的角度。这时的车速应在短 时间内迅速下降,否则小车将冲出赛道。 因此:小车速度控制的响应时间和控制精度对小 车性能的提高尤为重要
i ZO,PS,PM,PB j ZO,PS,PM,PB
反模糊化采用重心法,即
U U U U系统仿真 源自 常规PID控制▪ 模糊PID控制
智能小车电机模糊PID控制
演讲人:周玲玲 组 长:周玲玲 组 员:王 飞
王广胜
Contents
1
Click to add Title
2
Click to add Title
3
Click to add Title
4
Click to add Title
研究背景
智能车设计系统是一种以汽车电子为背景, 涵盖控制、模式识别、传感技术、电子、电气、 计算机、机械等多学科的科技创意性设计,它主 要由路径识别,速度采集,角度控制以及车速控 制等功能模块组成。该实验过程要求小车在白色 场地上,通过转向角和车速的空盒子,使其自动 地沿着一条任意给定的黑色带状引导线行驶。
控制器设计
r
模糊控制器
偏差
微分
偏差变 化率
模 糊 化
模糊 推理
反模 糊化
y
PID控制器
电机
模糊子集的选取
车速偏差e, 相应的论域{0,15,30,45} 模糊子集选取{ZO,PS,PM,PB}
智能汽车的控制系统设计与实现
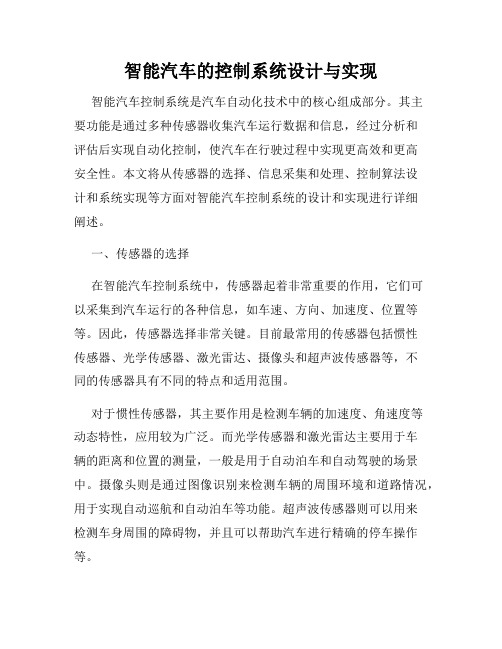
智能汽车的控制系统设计与实现智能汽车控制系统是汽车自动化技术中的核心组成部分。
其主要功能是通过多种传感器收集汽车运行数据和信息,经过分析和评估后实现自动化控制,使汽车在行驶过程中实现更高效和更高安全性。
本文将从传感器的选择、信息采集和处理、控制算法设计和系统实现等方面对智能汽车控制系统的设计和实现进行详细阐述。
一、传感器的选择在智能汽车控制系统中,传感器起着非常重要的作用,它们可以采集到汽车运行的各种信息,如车速、方向、加速度、位置等等。
因此,传感器选择非常关键。
目前最常用的传感器包括惯性传感器、光学传感器、激光雷达、摄像头和超声波传感器等,不同的传感器具有不同的特点和适用范围。
对于惯性传感器,其主要作用是检测车辆的加速度、角速度等动态特性,应用较为广泛。
而光学传感器和激光雷达主要用于车辆的距离和位置的测量,一般是用于自动泊车和自动驾驶的场景中。
摄像头则是通过图像识别来检测车辆的周围环境和道路情况,用于实现自动巡航和自动泊车等功能。
超声波传感器则可以用来检测车身周围的障碍物,并且可以帮助汽车进行精确的停车操作等。
二、信息采集和处理在传感器采集到数据后,需要进行信息采集和处理,以便能够自动化地控制汽车。
在信息采集方面,传感器采集到的数据需要进行读取和转换处理,例如通过模数转换器将模拟传感器数据转换成数字信号。
在本阶段,还需要对数据进行滤波和检测,例如检测并过滤噪声、异常数据等。
在信息处理方面,通过算法实现数据的解释、分析和评价。
算法可以对数据进行分类、规划和决策,并把结果反馈给汽车控制系统。
其中包括了很多基本的算法,如滞后控制算法、PID控制算法等。
另外,还有更先进的算法,如模糊逻辑控制、神经网络等。
三、控制算法设计在设计智能汽车控制系统时,算法设计也是一个关键环节。
控制算法应该能够使用汽车传感器和系统输入的数据来推断司机的意图和行驶状态。
在这些基础之上,控制算法可以确定如何控制各项汽车参数,以实现各种自动化操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者:王保磊机电1103-11221077目录背景简介一.智能汽车竞赛简介: (1)系统建立二.控制策略: (1)2.1:理论分析 (2)2.2 :PID控制规律的离散化 (3)2.3 :matlab分析 (4)2.4 :系统校正 (9)总结三.总结: (14)一.智能汽车竞赛简介。
全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
因而该竞赛是涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的比赛。
摄像头组比赛规则:采用模拟或数字摄像头对赛道信息进行采集,通过硬件二值化并进行软件信息处理,获得赛道信息,采用规定的舵机和电机控制小车的行走。
相同的赛道,竞速,完成赛道时间短的队伍获胜。
下图为赛道示意图和实际赛道照片。
为保证小车一直沿着黑色引导线快速行驶,系统主要的控制对象是小车的转向和车速。
即应使小车在直道上以最快的速度行驶。
在进入弯道的时刻尽快减速,且角度的转向要适合弯道的曲率,确保小车平滑地转弯,并在弯道中保持恒速。
从弯道进入直道时,小车的舵机要转向至中间,速度应该立即得到提升,直至以最大的速度行进。
为实现上述控制思想,我们采用不同的控制方法来控制小车的转角和速度。
下图为小车的实物模型:二.控制策略。
2.1:理论分析:Ov7620数字摄像头采集到的赛道信息为采集点灰度值,这些灰度值与设定的阀值进行比较转化为二进制信息,利用这些二进制信息可以确定赛道黑线位置,进而确定小车当前位置及理想通过曲线。
求得理想通过曲线上各点的斜率进而确定赛道类型,通过算法控制电机转速,以保证小车安全通过赛道防止侧翻和打滑。
计算小车的当前位置横坐标值即摄像头视野中线与理想通过曲线与横坐标交点的差值。
利用该差值控制舵机转角进而控制小车转向,在前进过程中向理想通过曲线靠拢。
通过以上分析,系统的模型可基本建立。
如图所示矩形ABCD 代表ov7620摄像头的采集范围。
令:e=X2-X1。
将e 作为系统的输入变量即偏差,计算该偏差的值利用PID 算法计算出输出U 的值,U 为当前输出控制舵机的PWM 值与上次的差值。
根据该差值可得控制舵机转角的PWM 值。
以上模型可以抽象为解决以e 为输入函数,U 为输出函数的系统稳定问题。
由以上分析得到了舵机的控制信号,及解决了小车的转向难题。
解决小车的速度问题方法与此类似。
根据理想通过曲线上不同点的斜率与适当阀值进行比较确定赛道类型,进而控制小车电机的PWM 信号达到车速控制目的。
其控制算法亦可用PID 算法。
本文仅对小车的舵机PID 算法进行分析研究。
接下来就是系统传递函数的建立。
2.2 PID 控制规律的离散化。
PID 控制器是一种线性调节器,这种调节器是将系统的给定值r 与实际输出值y 构成的控制偏差y r c -=的比例(P )、积分(I )、微分(D ),通过线性组合构成控制量,所以简称PID 控制器。
连续控制系统中的模拟PID 控制规律为: ])()(1)([)(0dtt de T dt t e T t e K t u DtIp ++=⎰(式1)式中)(t u 是控制器的输出,)(t e 是系统给定量与输出量的偏差,P K 是比例系数,I T 是积分时间常数,D T 是微分时间常数。
其相应传递函数为: )11()(s T sT K s G D I p ++= (式2)在系统中加入积分环节,微分环节会达到不同的调节效果。
如下进行介绍。
比例调节器、积分调节器和微分调节器的作用:(1)比例调节器:比例调节器对偏差是即时反应的,偏差一旦出现,调节器立即产生控制作用,使输出量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数P K 。
比例调节器虽然简单快速,但对于系统响应为有限值的控制对象存在静差。
加大比例系数P K 可以减小静差,但是,P K 过大时,会使系统的动态质量变坏,引起输出量振荡,甚至导致闭环系统不稳定。
(2)比例积分调节器:为了消除在比例调节中的残余静差,可在比例调节的基础上加入积分调节。
积分调节具有累积成分,只要偏差e 不为零,它将通过累积作用影响控制量u ,从而减小偏差,直到偏差为零。
如果积分时间常数I T 大,积分作用弱,反之为强。
增大I T 将减慢消除静差的过程,但可减小超调,提高稳定性。
引入积分词节的代价是降低系统的快速性。
(3)比例积分微分调节器:为了加快控制过程,有必要在偏差出现或变化的瞬间,按偏差变化的趋向进行控制,使偏差消灭在萌芽状态,这就是微分调节的原理。
微分作用的加入将有助于减小超调,克服振荡,使系统趋于稳定。
由于计算机系统是一种采样控制系统,只能根据采样时刻的偏差值计算控制量,因此,利用外接矩形法进行数值积分,一阶后向差分进行数值微分,当采样周期为T 时,)]([10-=-++=∑i i Dij j Ii p i e e TT e T Te K u (式3)如果采样周期足够小,这种离散逼近相当准确。
上式中i u 为全量输出,它对应于被控对象的执行机构第i 次采样时刻应达到的位置,因此,上式称为PID 位置型控制算式。
可以看出,按上式计算i u 时,输出值与过去所有状态有关。
当执行机构需要的不是控制量的绝对数值,而是其增量时,可导出下面的公式: )]2([2111----+-++-=-=∆i i i D i I i i p i i i e e e TT e T Te e K u u u (式4) 或)]2([2111----+-++-+=i i i D i I i i p i i e e e TT e T Te e K u u (式5)式4称为增量型PID 控制算式;式5称为递推型PID 控制算式; 增量型控制算式具有以下优点:(1)计算机只输出控制增量,即执行机构位置的变化部分,因而误动作影响小; (2)在i 时刻的输出i u ,只需用到此时刻的偏差,以及前一时刻,前两时刻的偏差1-i e 、2-i e ,和前一次的输出值1-i u ,这大大节约了内存和计算时间;(3)在进行手动—自动切换时,控制量冲击小,能够较平滑地过渡;控制过程的计算机要求有很强的实时性,用微型计算机作为数字控制器时,由于字长和运算速度的限制,必须采用必要的方法来加快计算速度。
下面介绍简化算式的方法。
按照式5表示的递推型PID 算式,计算机每输出一次i u ,要作四次加法,两次减法,四次乘法和两次除法。
若将该式稍加合并整理写成如下形式: 211)21()1(---++-+++=i D p i D p i DI p i i e TT K e T T K e T T T T K u u 221101---+-+=i i i i e a e a e a u (式6)式中系数0a 、1a 、2a 可以离散算出,从而加快了算法程序的运算速度。
按式6编制的数字控制器的程序框图如下图所示。
由于输出信号U 作为舵机PWM 值的变化量,小车实际位置与理想通过曲线与横坐标交点的差值e 作为输入误差值,选择增量式PID 算法。
因此其传递函数为增量式PID 传递函数。
输出与输入的关系为)]2([2111----+-++-=-=∆i i i D i i i p i i i e e e TT e T Te e K u u u ,其中Kp*T/Ti=Ki,Kp*Td/T=Kd其传递函数为:G(s)=Kp+Ki/s+Kd*s.2.3 matlab分析。
系统的输入函数是不确定的,因为对于小车循迹的过程中在某一时刻的偏差对应一个PWM差值,影响下一时刻的信息采集,采集的的信息经过二值化处理进行计算可得下一时刻的偏差,该偏差不仅受上一次输出值的影响还受外界环境的影响,是一个不确定的值,因此输入函数是不确定的。
在这里仅对小车做静态的PID算法分析,即设定输入函数为一定值。
进行matlab分析如下:设定传递函数为G(s)=10/[s(s^2+3s+2)].编写以下程序:clear;num=10;den=conv([1,0],[1,3,2]);G1=tf(num,den);figure;step(feedback(G1,1));figure;margin(G1);grid;在matlab中运行,可得下图图像:由该图可知系统是不稳定的。
其bode图为:2.4 系统校正。
为使系统变为稳定系统现增加一PID调节环节,此时系统传递结构框图变为:在matlab中编写以下程序:clear;Kp=8;Ki=12;Kd=1.90;s=tf('s');Gb=Kp*(Ki*Kd*s*s+Ki*s+1)/(Ki*s);figure;margin(G1*Gb);grid;figure;step(feedback(G1*Gb,1));G1=G1*Gb;接下来要做的是调节PID参数,使系统变得稳定。
工程上确定PID参数的方法为试凑法,具体实现如下:(1)先整定比例部分:将比例系数p K 由小调大,并观察相应的系统响应趋势,直到得到反应快、超调小的响应曲线。
如果系统没有静差或静差已小到允许范围之内,同时响应曲线已较令人满意,那么只须用比例调节器即可,最优比例系数也由此确定。
(2)如果在比例调节的基础上系统的静差不能满足设计要求,则须加入积分环节。
整定时一般先置—个较大的积分时间系数I T ,同时将第一步整定得到的比例系数p K 缩小一些(比如取原来的80%),然后减小积分时间系数使在保持系统较好的动态性能指标的基础上,系统的静差得到消除。
在此过程中,可以根据响应曲线的变化趋势反复地改变比例系数p K 和积分时间系数I T 从而实现满意的控制过程和整定参数。
(3)如果使用比例积分控制器消除了偏差,但动态过程仍不尽满意,则可以加入微分环节,构成PID 控制器。
在整定时,可先置微分时间系数D T 为零,在第二步整定的基础上,增大微分时间系数D T ,同时相应地改变比例系数p K 和积分时间系数I T ,逐步凑试,以获得满意的调节效果和控制参数。
值得一提的是,PID 三个参数可以互相补偿,即某一个参数的减小可由其他参数增大或减小来补偿。
因此用不同的整定参数完全可以得到相同的控制效果,这也决定了PID 控制器参数选取的非唯一性。
另外,对无自平衡能力的对象,则不应包含积分环节,即只可用比例或比例微分控制器。
在实时控制过程中,只要被控对象的主要性能指标达到了设计要求,就可以选定相应的控制器参数为最终参数。
目前,工程上仍广泛使用实验方法和经验方法来整定PID 的调整参数,称为PID 参数的工程整定方法。