模型机器人介绍
玩具模型——学习制作不同类型的玩具和模型

玩具模型——学习制作不同类型的玩具和模型玩具模型,这是一类经典的玩具。
从小孩子到大人,都会被它所吸引。
除了它可以给人们带来一定的乐趣之外,还可以让人们提高他们的制作能力和创意思维。
在这篇文章中,我们将会学习制作不同类型的玩具和模型,让自己的创造力得到充分的展示。
1. 第一类:机器人模型机器人模型是一类很受欢迎的模型,因为它们不仅有动感,而且也有趣。
制作机器人模型的技术一般分为两种,一种是用高级的电子元件,另一种是通过使用机械元件来制作。
第一种技术需要一个良好的基础知识,但是由于现在有许多在线视频可以参考,因此对初学者来说,也并不是那么困难。
另一种技术则需要制作者具有更多的机制和机械方面的知识。
根据制作者的兴趣和背景,他们可以选择自己喜欢的方法来制作机器人模型。
无论采用哪种技术,制作机器人模型的过程都很有趣,并且制成的模型流露出的机械动感,更是让人眼前一亮。
2. 第二类:飞行器模型飞行器模型,是一种更加高级的模型。
这种模型一般被用来设计和测试飞行控制系统。
制作飞行器模型需要一定的电子知识,但对于那些有兴趣进一步了解飞行器的人来说,制作一个飞行器模型是一件很有价值的事情。
制作飞行器模型可以通过使用模型飞机绘图来进行编程控制,也可以通过购买现成的控制系统来制作。
对于那些相信自己的力量的人来说,他们也可以尝试自己制作控制系统。
这种模型的创作不但需要大量的电子技能,更需要有创造力和勇气才可以完成。
3. 第三类:汽车模型汽车模型是一类受欢迎的玩具模型。
这种模型可以使用不同的材料来制作,如金属、玻璃纤维、树脂等。
使用不同的材料可以给自己带来不同的视觉效果。
不仅如此,汽车模型还可以通过更换细节部分来进一步加强他们的可玩性。
如果你是一位汽车爱好者,或是想以一种令人惊艳的方式来表达你对汽车的爱好,那么制作一辆汽车模型绝对是一个不错的选择。
4. 第四类:模型盒模型盒,是一种历史悠久的模型类别。
由于这种模型是模拟某种实际事物的缩小模型,因此制作时需要一定的精确性和细致性。
机器人感知AI技术的机器感知模型

机器人感知AI技术的机器感知模型随着人工智能(AI)技术的发展,机器人的感知能力日益强大。
机器人感知AI技术是指通过模拟人类感官,使机器能够感知和理解外界环境,从而更好地与人类进行交互和协作。
在这篇文章中,我们将探讨机器人感知AI技术中的机器感知模型。
1. 机器感知模型的概述机器感知模型是指一种模拟人类感官的方法,用于让机器人感知外界环境。
这种模型可以帮助机器人获取信息、分析数据、理解语言以及识别物体和人脸等任务。
机器感知模型通常包括计算机视觉、语音识别、自然语言处理等子模型。
2. 计算机视觉模型计算机视觉模型是机器感知模型中的关键部分。
它使用图像和视频数据作为输入,通过图像处理和模式识别算法来识别物体、人脸、动作等。
其中,深度学习技术在计算机视觉模型中扮演了重要角色,它可以通过大量数据训练神经网络,提高机器在图像识别方面的准确性和效率。
3. 语音识别模型语音识别模型使机器能够理解和识别语音指令。
这种模型可以将语音信号转化为文本,从而让机器能够理解并执行命令。
语音识别模型在智能助理、语音控制等领域有广泛应用,它的核心技术是声学模型、语言模型和发音词典等。
4. 自然语言处理模型自然语言处理模型有助于机器理解人类的自然语言。
它可以将文本转化为结构化的数据,并从中提取有用的信息。
自然语言处理模型涉及到词法分析、句法分析、语义分析等技术,它对于机器理解和生成文本具有重要意义。
5. 模型整合与应用机器感知模型的整合是将上述各个模型结合起来,形成一个综合的机器感知能力。
通过整合不同的感知模型,机器人可以获取丰富的信息,并更好地适应不同的应用场景。
比如,在智能导航领域,机器人可以通过计算机视觉模型感知周围的环境,通过语音识别模型理解人类的指令,从而提供准确的导航服务。
总结:机器人感知AI技术的机器感知模型是实现机器人感知能力的关键。
通过模拟人类感官,机器人可以更好地与人类进行交互和协作,为人们提供更多的便利和服务。
机器人的运动学和动力学模型

机器人的运动学和动力学模型机器人的运动学和动力学是研究机器人运动和力学性质的重要内容。
运动学是研究机器人姿态、位移和速度之间关系的学科,动力学则是研究机器人运动过程中力的产生和作用的学科。
机器人的运动学和动力学模型可以帮助我们理解机器人的运动方式和受力情况,进而指导机器人的控制算法设计和路径规划。
一、机器人运动学模型机器人运动学模型是描述机器人运动方式和位置关系的数学表达。
机器人的运动状态可以用关节角度或末端执行器的位姿来表示。
机器人的运动学模型分为正运动学和逆运动学两种。
1. 正运动学模型正运动学模型是通过机器人关节角度或末端执行器的位姿来确定机器人的位置。
对于串联机器人,可以使用连续旋转和平移变换矩阵来描述机械臂的位置关系。
对于并联机器人,由于存在并联关节,正运动学模型比较复杂,通常需要使用迭代方法求解。
正运动学模型的求解可以通过以下几个步骤:(1) 坐标系建立:确定机器人的基坐标系和各个关节的局部坐标系。
(2) 运动方程描述:根据机器人的结构和连杆长度等参数,建立各个关节的运动方程。
(3) 正运动学求解:根据关节的角度输入,通过迭代计算,求解机器人的末端执行器的位姿。
正运动学模型的求解可以用于机器人路径规划和目标定位。
2. 逆运动学模型逆运动学模型是通过机器人末端执行器的位姿来确定机器人的关节角度。
逆运动学问题在机器人的路径规划和目标定位等任务中起着重要作用。
逆运动学求解的难点在于解的存在性和唯一性。
由于机器人的复杂结构,可能存在多个关节角度组合可以满足末端执行器的位姿要求。
解决逆运动学问题的方法有解析法和数值法两种。
解析法通常是通过代数或几何方法,直接求解关节角度,但是解析法只适用于简单的机器人结构和运动方式。
数值法是通过迭代计算的方式,根据当前位置不断改变关节角度,直到满足末端执行器的位姿要求。
数值法可以用于复杂的机器人结构和运动方式,但是求解时间较长。
二、机器人动力学模型机器人动力学模型是描述机器人运动时受到的力和力矩的模型。
机器人模型的意义和作用教案
包括电机驱动器、液压驱动器等。
3
驱动器的构造
一般由功率放大器、执行机构等部分组成。
通信技术原理及构造剖析
01
通信技术的作用
实现机器人与外部环境、机器人与机器人之间的信息交流。
02
通信技术的种类
包括有线通信和无线通信两种。
03
通信技术的构造
一般由发送器、传输介质和接收器三部分组成。其中,发送器将信息转
娱乐服务
机器人模型可以在娱乐场 所提供表演、互动游戏等 服务,增加娱乐活动的趣 味性和互动性。
04
机器人模型技术原理及构造剖析
传感器技术原理及构造剖析
传感器的作用
将机器人感知到的外部环境信息 转化为电信号,以供控制器处理
。
传感器的种类
包括触觉传感器、视觉传感器、 听觉传感器等。
传感器的构造
一般由敏感元件、转换元件和测 量电路三部分组成。
优化改进方案提
性能优化
针对机器人模型的性能瓶颈,提出优化方案。例如,改进机械结构以减轻重量、提高刚度;优化控制算法以提高运动 精度和稳定性;升级传感器以提高环境感知能力等。
功能扩展
根据实际需求,提出机器人模型的功能扩展方案。例如,增加语音识别功能以实现人机交互;添加图像识别功能以实 现目标跟踪和识别;集成深度学习算法以实现自主导航和决策等。
促进智能制造、智慧城市等相关领域发展
机器人模型作为智能制造和智慧城市的重要组成部分,其发展将推动智能制造、智慧城市等相关领域的进步和发 展。
03
机器人模型作用分析
在教育领域应用
辅助教学
机器人模型可以模拟真实世界中的各 种情境,为教师和学生提供直观、生 动的教学辅助工具,提高教学效果。
机器人利用DH模型标定ppt课件

工具坐标系标定指的是工具坐标系相对于末端坐标系 的位姿参数的确定,即 坐标变换矩阵的确定。
工件坐标系的标定指的是工件坐标系相对于基坐标系 的位姿参数的确定,即 坐标变换矩阵的确定。
图1,坐标系的位置及关系
36
坐标系建立过程
依照上节知识,按照以下步骤建立坐标系 确定Zi轴。 确定Xi轴。 确定原点Oi。 确定Yi轴。
25
例题:对于如下图所示的简单机 器人,根据D-H表示法,建立必 要的坐标系,并填写相应的参数 表。
图1. 具有六个自由度的简单链式机器人
26
图2.简单六个自由度链式机器人的参考坐标系
27
图3.简单六个自由度链式机器人的参考坐标系线图
28
机器人参数表
#
d
a
1
1
0
0 90
2
2
0
a2
0
3
3
0
33
建立模型
建立描述机器人几何特性和运动性能的数学模型。运动 学模型的选择是决定机器人绝对定位精度的重要因素之 一。
最经典的运动学模型是D-H 模型,此模型的不足是相邻 两关节平行或接近平行时模型具有奇异性。
修正的 D-H模型(MDH)可以克服奇异问题:当相邻两 关节平行时,引入绕 y 轴的转角ß。
注意:在每一种情况下,关节n处的Z轴下标为n-1。 例如,表示关节n+1的Z轴是Zn
9
指定X轴
当两关节不平行或相交时,z 轴通常是斜线,但总有一条距 离最短的公垂线,它正交于任 意两条斜线。在公垂线方向上 定义本地参考坐标系的x轴。
如果an表示Zn-1与Zn之间的公 垂线,则xn的方向将沿an
34
建立符合DH模型的坐标系
机器人建模与仿真
机器人建模与仿真1. 介绍机器人建模与仿真是现代机器人技术领域中的重要研究方向,通过模拟机器人的行为和性能,可以在设计和开发阶段对机器人进行评估和优化。
本文将深入探讨机器人建模与仿真的原理、方法和应用,为读者提供全面的了解和参考。
2. 机器人建模2.1 机器人建模概述在进行仿真之前,首先需要对机器人进行建模。
机器人建模是将实际物理系统转化为数学或计算机可处理的形式。
常见的方法包括几何、动力学、力学、控制等方面的建模。
2.2 几何建模几何建模是将实际物体转化为几何形状的过程。
在机器人领域中,常用的几何表示方法包括点云、CAD等。
点云是通过激光雷达等传感技术获取到物体表面上一系列点的坐标信息,并通过算法处理得到物体表面形状。
2.3 动力学建模动力学建模是描述物体运动过程中受到外力作用下运动状态变化规律的数学描述。
在机器人领域中,常见的动力学建模方法包括欧拉-拉格朗日方法、牛顿-欧拉方法等。
通过动力学建模,可以准确描述机器人在不同环境下的运动行为。
2.4 力学建模力学建模主要研究机器人在受力作用下的变形和应变。
通过材料力学和结构力学的理论,可以对机器人进行强度和刚度等方面的分析。
在机器人设计中,合理的力学建模可以提高机器人系统的稳定性和可靠性。
2.5 控制建模控制建模是描述机器人系统控制过程中输入输出关系的数学描述。
常见的控制方法包括PID控制、状态空间法等。
通过对控制系统进行建模,可以设计出合适的控制策略来实现期望的运动和行为。
3. 仿真技术3.1 仿真技术概述仿真技术是指通过计算机对实际物理系统进行虚拟仿真实验,以验证、评估和优化设计方案。
在机器人领域中,仿真技术广泛应用于算法验证、行为规划、路径规划等方面。
3.2 基于物理引擎的仿真基于物理引擎的仿真是通过模拟物理规律来模拟机器人的行为。
常见的物理引擎包括ODE、Bullet、PhysX等。
通过物理引擎,可以模拟机器人在不同环境中的运动、碰撞等行为,为机器人设计和控制提供仿真环境。
人形机器人动力学

人形机器人动力学人形机器人是一个复杂的系统,涉及多个学科领域,包括机械工程、电子工程、计算机科学等。
其中,动力学是人形机器人设计和控制的关键因素之一。
下面将介绍人形机器人的动力学模型、控制方法以及相关的高级技术。
1.运动学模型运动学是人形机器人设计和控制的基础。
运动学模型描述了机器人各部分之间的相对位置和速度之间的关系。
通过建立运动学模型,可以确定机器人的姿态、步长等运动参数,为后续的动力学建模和控制提供基础数据。
2.动力学方程动力学方程是人形机器人设计和控制的核心。
它描述了机器人各部分之间的力和运动之间的关系。
通过建立动力学方程,可以预测机器人的运动轨迹和姿态,同时也可以为机器人的控制提供依据。
3.阻抗控制阻抗控制是一种基于弹性力学和控制理论的技术,用于实现机器人与环境的交互。
通过设定阻抗参数,可以控制机器人的刚度和灵敏度,使其适应不同的任务需求。
4.力控制力控制是一种基于力/位混合控制的技术,用于实现机器人力反馈和柔顺性控制。
通过设定力和位置控制参数,可以控制机器人的抓取和操作力度,使其适应不同的任务需求。
5.平衡控制平衡控制是一种基于稳定性和鲁棒性的控制技术,用于实现机器人在动态环境中的稳定性和平衡性。
通过设定平衡控制参数,可以控制机器人的姿态和重心位置,使其适应不同的任务需求。
6.步态规划步态规划是一种基于运动学和动力学的技术,用于实现机器人的行走和运动。
通过规划机器人的步态和步长,可以控制机器人的行走轨迹和姿态,使其适应不同的行走需求。
7.传感器融合传感器融合是一种基于多传感器信息融合的技术,用于提高机器人的感知和控制性能。
通过融合多种传感器信息,可以获得更准确的环境信息和机器人状态信息,从而更好地实现机器人的控制和感知。
8.交互与感知交互与感知是人形机器人的一项重要任务,用于实现机器人与人类或其他机器人之间的交互和感知。
通过设计和使用多种传感器和交互设备,可以增强机器人对环境的感知和理解能力,提高其交互性能和用户体验。
机器人学导论,第三章第四章
机器人学导论第三章:机器人建模与表示3.1 机器人模型机器人模型是机器人学中最重要的概念之一。
它描述了机器人的物理特征和行为。
机器人模型可以是物理模型,也可以是数学模型。
3.1.1 物理模型物理模型是指将实际的机器人物理特征通过物体的尺寸、质量、结构等进行描述的模型。
物理模型可以用来研究机器人的运动、力学特性以及与环境的交互。
在物理模型中,常用的描述方法有刚体模型和柔软体模型。
刚体模型认为机器人的构件是刚性的,不会发生变形,而柔软体模型则考虑了机器人构件的弹性特性。
3.1.2 数学模型数学模型是指通过数学方程或函数来描述机器人的特征和行为的模型。
数学模型可以用来研究机器人的控制算法、运动规划、感知等问题。
常用的数学模型有几何模型、运动学模型、动力学模型等。
几何模型描述机器人的几何特征,如位置、姿态等;运动学模型描述机器人的运动学特性,如速度、加速度等;动力学模型描述机器人的力学特性,如力、力矩等。
3.2 机器人表示机器人表示是指将机器人的信息进行编码和存储的方法。
机器人表示可以是离散的或连续的,可以是静态的或动态的。
机器人的状态表示是对机器人在某一时刻的特征和行为进行编码的方法。
常用的状态表示方法有位姿表示、关节状态表示、力传感器状态表示等。
位姿表示是指用位置和方向来描述机器人的姿态。
常用的位姿表示方法有笛卡尔坐标表示和欧拉角表示。
关节状态表示是指用关节角度或关节位置来描述机器人的关节状态。
力传感器状态表示是指用力和力矩来描述机器人的外部力和力矩。
机器人的环境表示是对机器人周围环境的信息进行编码的方法。
常用的环境表示方法有场景图表示、网格地图表示、障碍物表示等。
场景图表示是指用图的形式表示机器人周围的物体及其关系。
网格地图表示是指将机器人周围的环境划分为一个个网格,每个网格表示一种状态。
障碍物表示是指用几何体或网格来表示机器人周围的障碍物。
3.3 机器人建模与表示的应用机器人建模与表示在机器人学中具有广泛的应用。
描述机器人状态和运动的数学模型

描述机器人状态和运动的数学模型
机器人状态和运动的数学模型可以用数学符号和方程式来表示和描述。
1. 机器人状态模型
机器人状态包括位置和姿态两个方面,可以用以下符号和方程式来描述:
* 位置:用三维坐标系表示,分别为X、Y、Z,用向量 r 表示,即 r=[X, Y, Z]。
* 姿态:用欧拉角或四元数表示,分别为 yaw、pitch、roll 或 q1、q2、q3、q4,用向量 q 表示,即 q=[q1, q2, q3, q4]。
2. 机器人运动模型
机器人运动包括平移和旋转两个方面,可以用以下符号和方程式来描述:
* 平移:用向量 t 表示,即 t=[dx, dy, dz],表示机器人在 x、y、z 三个方向上的平移距离。
* 旋转:用旋转矩阵 R 或四元数 Q 表示,分别为
R=[r11, r12, r13;
r21, r22, r23;
r31, r32, r33]
Q=[q1, q2, q3, q4]
其中旋转矩阵 R 表示机器人旋转前后坐标系之间的变换关系,四元数 Q 表示机器人旋转角度和旋转轴之间的关系。
综合起来,机器人状态和运动的数学模型可以表示为:
机器人状态:r=[X, Y, Z], q=[yaw, pitch, roll] 或 q=[q1, q2, q3, q4]
机器人运动:t=[dx, dy, dz], R=[r11, r12, r13; r21, r22, r23; r31, r32, r33] 或 Q=[q1, q2, q3, q4]
以上是常用的机器人状态和运动的数学模型,不同类型的机器人可能会使用不同的数学模型来描述其状态和运动。
机器人发展和应用,神舟五号飞船模型,介绍

机器人发展和应用,神舟五号飞船模型,介绍
机器人发展和应用:
机器人是指能够自动执行任务、具备感知、决策和执行能力的机械设备。
机器人的发展与应用涉及到多个领域,如工业制造、医疗保健、农业、航天、军事等。
在工业制造领域,机器人能够替代人工进行装配、焊接、搬运等重复性工作,提高生产效率和品质。
在医疗保健领域,机器人可以辅助手术、提供康复训练、进行患者护理等工作,减轻医护人员的负担。
在农业领域,机器人可以进行自动化的播种、喷洒农药、收割等工作,提高农作物的产量和质量。
在航天领域,机器人可以进行太空探索、卫星维修、空间站建设等任务,减少宇航员面临的风险。
在军事领域,机器人可以执行侦察、救援、爆炸物处理等任务,保护士兵的安全。
神舟五号飞船模型:
神舟五号是中国航天员进行载人太空飞行的飞船,它是中国第一次实施载人航天任务的载体。
神舟五号飞船模型是对神舟五号飞船的缩小比例再现,用于展示或收集。
神舟五号飞船模型通常由塑料、金属等材料制成,根据原型的外观和结构精心设计制作而成。
模型包括了飞船上的各个模块,比如指令舱、返回舱、推进系统等。
模型的细节还会根据真实飞船进行精细雕刻和涂装,以还原原型的外观特点和色彩。
神舟五号飞船模型可以用于教育、科普、展示等用途。
在教育方面,它可以帮助人们更好地了解和学习中国航天事业的发展与成就。
在科普方面,它可以向公众普及航天知识,增加大家对航天技术的兴趣和认识。
在展示方面,它可以作为飞船模型收藏者的珍贵收藏品,展示在博物馆、展览或私人空间中。
总之,神舟五号飞船模型是一个承载着航天历史和科技发展的具有特殊意义的物品。
大型机器人模型知识

大型机器人模型知识
大型机器人模型是一种具有高度仿真度和复杂功能的机器人模型,通常由金属、塑料和其他材料制成。
这些模型通常是按照真实
机器人或科幻作品中的机器人设计制作的,具有逼真的外观和动作。
大型机器人模型不仅是玩具或收藏品,更是一种展示科技、机械和
工程技术的杰作。
大型机器人模型的制作需要深厚的机械和电子知识,以及对材
料和工艺的精湛掌握。
制作过程通常包括设计、模型制作、电路连
接和程序编码等多个环节。
制作者需要对机械结构、电子元件和程
序控制有深入的了解,才能完成一个高质量的大型机器人模型。
大型机器人模型的功能也非常丰富,可以包括远程遥控、自主
行走、声光效果、甚至人机交互等多种特性。
这些功能需要制作者
对传感器、执行器、控制系统等方面有着丰富的经验和技能,才能
实现。
除了技术方面的挑战,大型机器人模型的制作也需要制作者对
机器人本身的特性有深入的了解。
他们需要研究真实机器人的运动
原理、结构设计和工作原理,以便将这些知识应用到模型的制作中。
总的来说,大型机器人模型知识涉及到机械、电子、编程、材料和机器人学等多个领域的知识,需要制作者具备综合的技术素养和丰富的经验。
制作一个高质量的大型机器人模型不仅需要创造力和想象力,更需要对科技和机械的深刻理解。
希望未来能有更多的人投身到大型机器人模型的制作中,为科技和机械领域的发展做出更大的贡献。
机器人的运动学和动力学模型是什么
机器人的运动学和动力学模型是什么机器人的运动学和动力学模型是为了描述机器人运动和力学特性而建立的数学模型。
运动学模型描述机器人的位姿、速度和加速度,而动力学模型则描述机器人的力、力矩和力的影响。
本文将详细介绍机器人的运动学和动力学模型,包括其定义、应用和建模方法。
一、运动学模型1. 定义机器人的运动学模型用于描述机器人的位姿、速度和加速度之间的关系。
位姿是机器人在三维空间中的位置和方向,速度是机器人在时间上的位置变化率,加速度是速度的变化率。
运动学模型可以帮助我们理解机器人的运动规律,例如机器人的轨迹、路径和姿态等。
2. 应用运动学模型在机器人领域有广泛的应用。
首先,它可以用于路径规划和轨迹跟踪。
通过建立机器人的运动学模型,我们可以预测机器人在不同环境下的运动轨迹,从而实现有效的路径规划和轨迹跟踪。
其次,运动学模型可以用于机器人的姿态控制。
通过了解机器人的位姿、速度和加速度之间的关系,我们可以设计控制算法,实现机器人在不同姿态下的运动控制。
此外,运动学模型还可以用于机器人的碰撞检测和避障。
通过分析机器人的运动学特性,我们可以预测机器人的碰撞风险,并采取相应的避障策略。
3. 建模方法机器人的运动学模型可以通过几何方法、代数方法和向量方法进行建模。
几何方法是最常用的建模方法之一。
它通过描述机器人的几何特征和运动规律来建立运动学模型。
例如,可以使用笛卡尔坐标系和欧拉角来描述机器人的位姿,使用导数和积分来描述机器人的速度和加速度。
代数方法是另一种常用的建模方法。
它通过代数方程和矩阵运算来描述机器人的位姿、速度和加速度之间的关系。
例如,可以使用坐标变换和雅可比矩阵来描述机器人的运动规律。
向量方法是较新的建模方法之一。
它通过向量运算和微分几何来描述机器人的位姿、速度和加速度之间的关系。
例如,可以使用四元数和向量叉乘来描述机器人的姿态和运动规律。
二、动力学模型1. 定义机器人的动力学模型用于描述机器人的力、力矩和力对机器人的影响。
幼儿园模型机器人制作方案

幼儿园模型机器人制作方案一、方案概述本方案旨在为幼儿园制作一款可供幼儿操作的模型机器人,该机器人具有简单易懂的操作方式,能够提高幼儿的观察能力和动手能力,让他们在玩乐中学习。
二、设计理念1. 造型设计:机器人造型要具有可爱、温馨的特点,它应该是幼儿们心目中理想的伙伴。
2. 操作方式:机器人需要配备简单易懂的操作方式,如按钮、开关、遥控器等。
3. 材料选择:机器人主体材料应选用环保材料,安全无毒无害。
4. 功能设置:机器人需要拥有丰富多彩的功能设置,如说话、唱歌、跳舞等。
三、材料准备1. 木板或塑料板材2. 齿轮3. 电动马达4. 遥控模块5. 语音模块6. LED灯珠7. 按钮开关四、制作步骤1. 制作机器人主体。
使用木板或塑料板材制作出机器人的外壳,并根据设计理念进行粉刷或喷漆等装饰。
2. 安装电动马达与齿轮。
将电动马达固定在机器人主体内,然后通过齿轮传递力量,驱动机器人的运动。
3. 安装遥控模块。
将遥控模块固定在机器人主体内,实现远程操控机器人的功能。
4. 安装语音模块。
将语音模块安装在机器人主体内,并设置好语音功能,如播报儿歌、故事等。
5. 安装LED灯珠。
将LED灯珠安装在机器人主体上,实现闪烁、变色等效果。
6. 安装按钮开关。
安装方便的按钮开关,以便幼儿可以方便地操作。
五、功能设置1. 说话:语音模块可以播放儿童歌曲、故事等内容,让幼儿听到更多的声音和信息。
2. 唱歌:机器人可以唱儿童歌曲或童谣等内容,提高幼儿对音乐的感知能力。
3. 跳舞:通过电动马达和齿轮传动实现跳舞功能,让幼儿感受到音乐和舞蹈的魅力。
4. 闪烁:通过LED灯珠实现闪烁、呼吸等效果,让机器人更加生动有趣。
5. 远程操控:通过遥控模块实现远程操控机器人,提高幼儿的观察和操作能力。
六、安全注意事项1. 制作过程中要注意材料的环保性和安全性。
2. 安装电动马达时要注意电源的安全,避免触电事故。
3. 遥控模块应设置适当的距离,以避免对幼儿产生不良影响。
机器人运动学与动力学建模分析
机器人运动学与动力学建模分析机器人运动学和动力学建模是研究机器人行为和运动规律的重要领域。
运动学主要关注机器人的位置、速度和加速度等几何特性,而动力学则研究机器人运动背后的力学原理。
在这篇文章中,我们将介绍机器人运动学和动力学建模的基本概念和方法,并通过实例分析来加深理解。
一、机器人运动学建模机器人运动学建模是描述机器人位置和运动规律的数学模型。
在机器人控制中,运动学模型非常重要,它可以帮助我们预测机器人的运动轨迹、速度和加速度等信息。
常用的机器人运动学模型包括点式机器人和刚体机器人模型。
1. 点式机器人模型点式机器人模型是最简单的机器人模型。
它假设机器人是一个质点,没有具体的形态和刚性要求。
我们可以用一个坐标系表示机器人的位置,通过几何变换和向量运算来描述机器人的运动。
点式机器人模型常用于描述移动车辆等简单机器人。
2. 刚体机器人模型刚体机器人模型是对真实机器人的更为精确的描述。
它考虑了机器人的形态和刚性特性,并用连续的链接和关节来模拟机器人的结构。
刚体机器人模型可以通过关节角度和链接长度来推导机器人的位置和姿态变换。
常见的刚体机器人模型包括直线型机器人和旋转型机器人等。
二、机器人动力学建模机器人动力学建模是研究机器人运动背后力学原理的数学模型。
它描述了机器人在受到力和扭矩作用下的运动规律。
机器人动力学建模可以帮助我们了解机器人运动的原因和机理,为机器人控制和优化提供重要参考。
1. 基本原理机器人动力学建模基于牛顿第二定律,将机器人的质量、惯性、外力和关节扭矩等因素考虑在内。
通过建立动力学方程,我们可以推导出机器人在不同状态下的运动方程,并对机器人的运动进行预测和分析。
动力学建模涉及到力、力矩、加速度等物理量的计算和描述,需要运用向量和矩阵运算等数学工具。
2. 模型分析与仿真机器人动力学建模不仅可以推导出机器人的运动方程,还可以通过数值仿真和模拟来对机器人的运动进行分析和验证。
利用计算机软件和数值计算方法,我们可以模拟不同环境和力量条件下,机器人的运动轨迹和力学特性。
摩托尔斯丁机器人模型3B的用户指南说明书
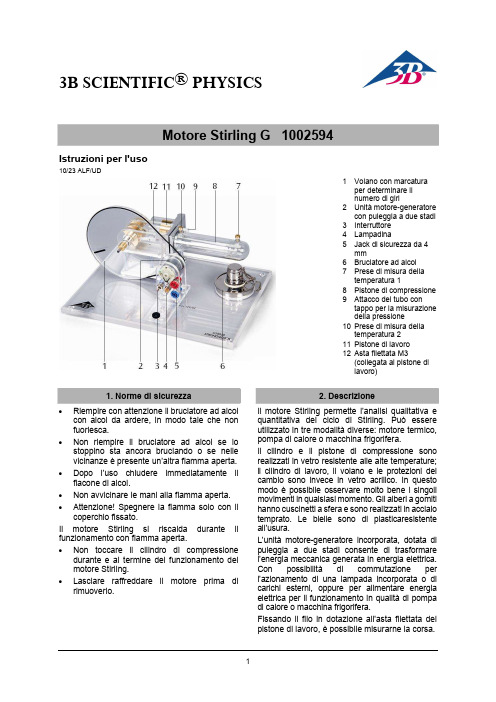
3B SCIENTIFIC ® PHYSICS1Motore Stirling G 1002594Istruzioni per l'uso10/23 ALF/UD1 Volano con marcaturaper determinare il numero di giri2 Unità motore-generatorecon puleggia a due stadi 3 Interruttore 4 Lampadina5 Jack di sicurezza da 4mm6 Bruciatore ad alcol7 Prese di misura dellatemperatura 18 Pistone di compressione 9 Attacco del tubo contappo per la misurazione della pressione10 Prese di misura dellatemperatura 2 11 Pistone di lavoro 12 Asta filettata M3(collegata al pistone di lavoro)1. Norme di sicurezzaRiempire con attenzione il bruciatore ad alcol con alcol da ardere, in modo tale che non fuoriesca.Non riempire il bruciatore ad alcol se lostoppino sta ancora bruciando o se nelle vicinanze è presente un’altra fiamma aperta. Dopo l’uso chiudere immediatamente ilflacone di alcol.Non avvicinare le mani alla fiamma aperta. Attenzione! Spegnere la fiamma solo con ilcoperchio fissato.Il motore Stirling si riscalda durante il funzionamento con fiamma aperta.Non toccare il cilindro di compressionedurante e al termine del funzionamento del motore Stirling.Lasciare raffreddare il motore prima dirimuoverlo.2. DescrizioneIl motore Stirling permette l’analisi qualitativa e quantitativa del ciclo di Stirling. Può essere utilizzato in tre modalità diverse: motore termico, pompa di calore o macchina frigorifera.Il cilindro e il pistone di compressione sono realizzati in vetro resistente alle alte temperature; il cilindro di lavoro, il volano e le protezioni del cambio sono invece in vetro acrilico. In questo modo è possibile osservare molto bene i singoli movimenti in qualsiasi momento. Gli alberi a gomiti hanno cuscinetti a sfera e sono realizzati in acciaio temprato. Le bielle sono di plasticaresistente all’usura.L’unità motore-generatore incorporata, dotata di puleggia a due stadi consente di trasformare l’energia meccanica generata in energia elettrica. Con possibilità di commutazione per l’azionamento di una lampada incorporata o di carichi esterni, oppure per alimentare energia elettrica per il funzionamento in qualità di pompa di calore o macchina frigorifera.Fissando il filo in dotazione all'asta filettata del pistone di lavoro, è possibile misurarne la corsa.23. Dati tecniciUnità motore-generatore: max. 12 V CC Puleggia a due stadi: 30 mm Ø, 19 mm Ø Pistone di lavoro: 25 mm Ø Corsa pistone di lavoro: 24 mm Variazione del volume:24 mm 325mm 12cm 2Volume minimo: 32 cm³ Volume massimo: 44 cm³Potenza del motore Stirling: ca. 1 WDimensioni: ca. 300x220x160 mm³ Peso: ca. 1,65 kg4. Schema di funzionamentoIl ciclo Stirling ideale avviene in 4 fasi:1a fase: fase di espansione: cambiamento distato isotermico, l’aria si espande a temperatura costante2a fase: cambiamento di stato isocorico, l’ariasi raf fredda a volume costante nel rigeneratore3a fase: fase di compressione: cambiamentodi stato isotermico, l’aria viene compressa in modo isotermico4a fase: cambiamento di stato isocorico, l’ariaviene di nuovo riscaldata alla temperatura origina ria nel rigeneratoreNel motore Stirling, questo processo ideale è realizzato solo in maniera approssimativa, perché i quattro tempi si sovrappongono. Il gas passa da caldo a freddo già durante la fase di espansione e durante la fase di compressione l’aria non si trova ancora tutta nella parte fredda del motore.Fig. 1 Schema di funzionamento(A: Pistone di compressione, B: Pistone di lavoro)5. Utilizzo5.1 Il motore Stirling come motore termico Riempire il bruciatore ad alcool, inserirlonell’incavo della piastra di base, estrarre svitando lo stoppino di circa 1-2 mm e accenderlo.Portare i pistoni di compressione nellaposizioni più arretrata e dopo un breve periodo di riscaldamento (da 1 a 2 minuti circa) mettere in movimento il volano con una leggera pressione in senso orario (sguardo rivolto verso l'unità motore-generatore) (vedere fig. 2).Se necessario, impostare la tensione dellacinghia di trasmissione spostando l'unità motore-generatore. Accendere la lampadina spostandol'interruttore nella posizione “sopra”.In alternativa collegare il carico esternotramite le prese da 4 mm e mettere in funzione con l’interruttore in posizione "sotto".Numero di giri senza carico: ca. 1000 giri/min Numero di giri congeneratore come carico: ca. 650 giri/min Tensione generatore: ca. 6 V CC Scarto di pressione: +250 hPa/-150 hPa5.2 Il motore Stirling come pompa di calore omacchina frigoriferaDotazione supplementare necessaria:1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 230 V1003312oppure1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 115 V1003311Termometro digitale 1002794 Inserire i sensori di temperatura nelle presedi misura della temperatura e collegarli ad un misuratore (vedere fig. 3).Collegare la sorgente di corrente continuatramite le prese da 4 mm.Impostare al massimo 12 V e azionare ilmotore di Stirling con l'interruttore in posizione "sotto".Osservare l’aumento o la diminuzione ditemperatura.In modalità di funzionamento macchina frigorifera il volano ruota in senso orario (sguardo rivolto verso l'unità motore-generatore), in modalità pompa di calore in senso antiorario.Per cambiare la modalità difunzionamentoinvertire la polarità dei cavi di collegamento.3Scarto di pressione: +250 hPa/-150 hPa Tensione motore: 9 V Numero di giri: 600 giri/minDifferenza di temperatura (riferita a 21° C): Macchina frigorifera: -4 K (serbatoio: +6 K) Pompa di calore: +13 K (serbatoio: -1 K)5.3 Registrazione del diagramma pressione-volume del motore Stirling come pompa di caloreDotazione supplementare necessaria:1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 230 V1003312oppure1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 115 V10033111 Portasensori per motore Stirling G 1008500 1 Sensore di pressione relativa ±1000 hPa 1021533 1 Rilevatore di corsa FW 10215342 Cavos del sensore 1021514 1 Data logger 1 SoftwareUlteriori informazioni sulla misurazione digitale sono disponibili sul sito web del prodotto, nel webshop 3B.Fissare il portasensori alla piastra di base delmotore Stirling.Nel portasensori, montare il sensore dipressione relativa in basso e il rilevatore di corsa in alto in modo tale che il lato stampato sia rivolto verso l’alto.Collegare l’attacco del tubo “+” del sensore di pressione relativa e l’attacco tubo sul cilindro di lavoro del motore Stirling per mezzo del tubo flessibile fornito in dotazione con il portasensori (1008500).Avvitare il dado cieco fissato al filo (compreso nella dotazione del portasensori) sull’asta filettata del pistone di lavoro, passare il filo intorno alla puleggia del rilevatore di corsa e appendere la molla ad elica all’asta filettata. (Per una descrizione dettagliata relativa al montaggio dei sensori sul portasensori vedere le istruzioni per l’uso del portasensori 1008500.)Collegare il sensore di pressione relativa e il rilevatore di corsa al data logger.Collegare la sorgente di corrente continua tramite le prese da 4 mm.Impostare al massimo 12 V e azionare il motore di Stirling con l'interruttore in posizione "sotto".Avviare il software e registrare il diagramma pressione-volume.Fig.2Il motore Stirling come motore termico3B Scientific GmbH Ludwig-Erhard-Straße 20 20459 Amburgo • Germania • Con riserva di modifiche tecniche © Copyright 2023 3B Scientific GmbHFig. 3 Il motore Stirling come pompa di calore o macchina frigoriferaFig. 4 Registrazione del diagramma pressione-volume。
机器人的运动学和动力学模型
机器人的运动学和动力学模型机器人技术是近年来快速发展的研究领域之一,而是其设计与控制的重要基础。
机器人的动作是通过其运动学和动力学模型来描述和控制的,这些模型可以帮助我们更好地理解机器人在空间中的运动规律,从而实现更精准、高效的控制和规划。
机器人的运动学描述了机器人在空间中的运动规律,例如位置、速度、加速度等。
通过对机器人的构造和关节运动的分析,可以建立机器人的运动学模型,从而确定机器人末端执行器的位置和姿态。
运动学模型可以帮助我们计算机器人在空间中的运动轨迹,实现定位、导航和路径规划等功能。
通过运动学模型,我们可以了解机器人的运动范围、工作空间以及姿态控制的可行性,为机器人的设计和控制提供重要参考。
而机器人的动力学则描述了机器人在运动过程中所受到的力和力矩等动力学参数。
通过动力学模型,我们可以分析机器人在完成任务时所需的力和能量,设计合适的控制算法来实现对机器人的精准控制。
动力学模型还可以帮助我们评估机器人的稳定性和负载能力,为机器人的安全运行提供依据。
机器人的运动学和动力学模型是机器人控制和规划的重要理论基础,通过对机器人的结构和运动规律进行建模和分析,可以更好地设计机器人的控制系统,实现机器人在复杂环境中的高效运动和任务完成。
在实际应用中,机器人的运动学和动力学模型也广泛应用于工业生产、服务机器人、医疗机器人等领域,为机器人技术的发展和应用提供了有力支持。
在机器人的运动学模型中,关节运动是机器人运动的基本方式,关节之间的协调运动决定了机器人的终端执行器的路径和姿态。
通过对机器人关节的运动学分析,可以建立机器人的正运动学模型,描述机器人末端执行器的位置和姿态之间的关系。
而逆运动学模型则可以帮助我们确定给定位置和姿态下各关节的角度,从而实现对机器人的精准控制。
运动学模型还可以帮助我们设计机器人的轨迹规划算法,实现机器人在空间中的高效运动和避障。
机器人的动力学模型描述了机器人在运动过程中所受到的力和力矩之间的关系,是实现机器人精准控制和优化运动的重要基础。
水下机器人动力学模型研究与仿真

水下机器人动力学模型研究与仿真随着科技的不断进步和人类对于深海和极地的探索,水下机器人的应用越来越广泛,涉及到海洋资源开发、环境监测和军事活动等领域。
与此同时,水下机器人动力学模型研究也越来越重要。
本文将简要介绍水下机器人动力学模型及其仿真,并对其研究内容进行探究。
一、水下机器人的动力学模型水下机器人的动力学模型是描述机器人在不同条件下的运动规律和力学性能的理论模型。
它是水下机器人研究的基础,具有重要的理论和实践价值。
水下机器人的运动涉及到机械结构、电子控制系统、液压系统、水动力学和水下环境等多个方面,因此,动力学模型也是一个复杂的系统。
水下机器人动力学模型的建立主要包括以下几方面内容:1、机器人的动力学分析机器人的动力学分析主要研究机器人在运动中的力学性能,包括机器人的运动学、力学和动力学等方面。
这是分析机器人运动规律的基础。
2、机器人姿态的建立机器人姿态的建立是指对机器人位置和姿态的准确描述和表达,它是机器人动力学模型的重要组成部分。
机器人姿态的描述一般采用欧拉角或四元数表示,可以根据机器人的传感器数据推算出来。
3、水动力学分析水动力学分析是机器人运动的基础,主要研究机器人在水下环境中的受力情况和流体动力学特性。
涉及到机器人的水阻力、浮力、舵效应等方面。
4、控制系统建模控制系统建模是将机器人的动力学建模与控制系统建模相结合,建立机器人整体的动力学模型。
包括力控系统、动力控制系统和运动控制系统等。
二、水下机器人动力学模型的仿真水下机器人动力学模型的仿真是对实际机器人性能进行模拟和预测的有效手段。
它可以节省时间和成本,提高研究效率和可靠性。
水下机器人动力学模型的仿真可以分类为离线仿真和在线仿真两种。
1、离线仿真离线仿真是指在计算机上模拟机器人的运动规律,分析机器人在不同条件下的性能和运动规律。
离线仿真一般都是在水下环境的三维模型上进行,通过动画和图表等多种方式来呈现仿真结果。
这种仿真方式适用于机器人设计、性能分析和控制算法优化等方面。
大模型和服务机器人结合的例子

大模型和服务机器人结合的例子摘要:1.介绍大模型和服务机器人的概念2.阐述大模型和服务机器人结合的优势3.分析大模型和服务机器人结合的挑战4.展望大模型和服务机器人结合的未来发展5.总结正文:随着人工智能技术的不断发展,大模型和服务机器人正逐渐成为人们关注的焦点。
本文将围绕大模型和服务机器人的结合,探讨其优势、挑战及未来发展。
1.介绍大模型和服务机器人的概念大模型,指的是具有大规模知识表示和复杂逻辑推理能力的人工智能系统。
服务机器人,则是指能够为人类提供各种服务的机器人。
近年来,大模型和服务机器人的技术发展取得了显著成果,两者结合在一起,将更好地服务于人类。
2.阐述大模型和服务机器人结合的优势大模型和服务机器人结合的优势主要体现在以下几个方面:(1) 大模型可以提供丰富的知识库,使服务机器人具备更强的智能。
(2) 大模型能够进行自然语言理解和生成,让服务机器人更好地与人类沟通。
(3) 大模型具有强大的逻辑推理能力,能够协助服务机器人解决复杂问题。
(4) 服务机器人可以依托大模型实现多种功能,提高服务效率和质量。
3.分析大模型和服务机器人结合的挑战尽管大模型和服务机器人结合具有诸多优势,但在实际应用过程中,仍面临一些挑战:(1) 大模型的计算复杂度高,可能导致服务机器人反应速度慢。
(2) 大模型与服务机器人的接口设计需充分考虑实际应用场景,以实现无缝对接。
(3) 随着大模型不断更新迭代,服务机器人需要不断进行模型训练和优化,以保持技术领先。
4.展望大模型和服务机器人结合的未来发展随着技术的不断进步,大模型和服务机器人的结合将越来越紧密。
未来,我们有望看到更多具备强大智能的服务机器人出现在各个领域,为人类提供更加便捷、高效的服务。
5.总结大模型和服务机器人结合的例子展示了人工智能技术在各个领域的广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章 模型机器人介绍在本章中我们学习了解模型机器人常见的的几种系列,以及每种系列机器人的特点。
同学们可以通过图片来观察一下,看看你以前在各种场合见过哪几种系列的模型机器人。
注:在我们后续的学习中,我们将采用积木式系列机器人来完成各项任务。
1.1 甲虫系列特点:1、入门简单2、结构固定3、传感器设置固定4、编程简单5、娱乐趣味性强学习要点:1、机器人初级入门学习2、编程原理学习3、传感器原理学习1.2 伺服系列特点:1、模拟结构2、肢体语言丰富3、动作调整细致甲虫系列机器人属于结构固定的机器人学习要点:1、肢体结构研究2、运动原理研究3、工业控制原理研究1.3 积木系列特点:1、模块结构2、端口数量多3、编程语言多样化4、具备开放性以及模块化学习要点:1、算法和程序原理2、结构搭建原理3、机器人制作4、整体协调能力我校机器人小组主要选用的就是这种积木系列的模型机器人,通过积木式的组装与程序调试,我们可以让机器人按照我们的意愿去完成各项任务。
伺服系列机器人属于仿生肢体机器人1.4 DIY 系列特点:1、结构组合情况多样2、功能组合变化丰富3、材料题材来源丰富学习要点:1、动手能力锻炼2、创造能力锻炼1.5 虚拟系列特点:1、图形编程、C 源代码显示2、学习成本低廉、全软件教学3、活动形式多样AI-CODE SYSTEM学习要点:1、编程原理2、事件处理能力3、语言学习能力机器人快车软件——用来编写给机器人运行的命令第二章模型机器人硬件入门讲解2.1 机器人运作原理2.2 机器人的大脑——主控制器RCU介绍2.2.1 采用A VR系列单片机特点:1、ATMEL公司产品,与51系列控制方法接近,学生容易上手2、运算速度非常快3、程序空间大,能够容纳的程序数量多2.2.2 电脑与RCU之间的传输方式当我们在电脑上完成机器人主控程序的编写后,一般采用以下几种方式把电脑上的程序传输到RCU上。
串口传输、USB传输、红外线传输、无线电传输2.3机器人动作模块介绍2.3.1 发光模块模块功能:主要起指示作用。
同时能够增加机器人的动态效果。
模块应用:状态指示灯、流水灯等2.3.2 马达模块模块功能:可以带动物体运动,能够前转、后转或是静止。
速度调整范围是1~100。
模块应用:作为机器人行走的车轮等2.3.3 风扇模块模块功能:具有吹风的功能,可选择正转、反转或是静止。
模块应用:智能风扇、机器人灭火等2.3.4 发声模块模块功能:具有发音的功能,音频能够调节。
模块应用:喇叭、警报发声等。
2.3.5 液晶模块模块功能:显示数据。
能够显示4位的数据,每个显示位数据能够独立控制。
模块应用:显示测量的环境数据,如黑标测量等2.3.6 伺服电机模块功能:可以带动物体运动,能够。
能够随意定位在1~180度的角度范围内。
模块应用:智能门、风扇摆动等2.4动作模块实验——机器人曲线运动材料:主控制器、马达模块学习目的:通过编制程序,了解各种转弯动作的控制方法以及用途。
转弯的方法:(设置两个并列的马达模块的动作)1、一个不动一个前进:靠近的转弯2、一个不动一个后退:远离的转弯3、一个前进一个后退:原地急转弯4、一个马达快,一个马达慢(同方向)2.5机器人感应模块介绍2.5.1 触碰检测模块模块功能:检测外界的碰撞信号,表示一种有或无的状态。
模块应用:触碰小车、开关等2.5.2 环境光测量模块模块功能:环境亮度的检测,能够供1~255个亮度级。
模块应用:路灯、天亮提示等2.5.3 模拟黑标模块模块功能:检测外界的灰度变化、颜色变化,对应显示出1~255的状态值。
模块应用:黑标检测等2.5.4 红外发射接收模块模块功能:发射特定的红外线以及检测特定的红外线。
模块应用:两个模块能够独立使用或是混合使用。
障碍检测等。
2.5.5 声音检测模块模块功能:检测外界声音的波动,同时得到声音的幅度(1~255)模块应用:声控开关等2.6感应模块实验——模拟黑标演示材料:主控制器、模拟黑标模块、液晶显示模块学习目的:通过编制程序,学习运用液晶显示模块显示动态数据。
2.7感应模块与动作模块对照2.7.1两种模块的区别对照表要点:容器–变量是程序编写中使用的变量。
主要用来保存返回的结果或是经常变动的数据。
第三章模型机器人软件入门讲解在上一章节中,我们学习了组装机器人外形的硬件,以及让机器人运动的两种硬件模块。
现在我们就来学习一下如何让那些硬件动起来——看看控制这些硬件模块的软件是怎样的。
3.1 软件安装以下以演示图来学习如何安装程序软件。
步骤1:安装.NET后台步骤2:安装RCU编程控制软件步骤3:语言选择步骤4:编译器设置步骤5:编译器选择选择完编译器后,我们就完成了RCU 编程控制软件的安装,下面我们来初步学习一下如何使用这个软件。
3.2 软件操作流程3.3 软件操作3.3.1 新建对象种类设定使用的模块的端口按照思路编辑程序模块 把程序编译成机器人能识别的机器码 把机器码送到机器人中3.3.2 软件整体架构3.3.3 打开硬件信息表流程模块库编程区代码区功能说明 机器人硬件模块信息设置流程:3.3.5 软件编程—模块连接命名3.3.6 软件编程—模块属性设置3.4 软件编程实验3.4.1发光实验控制一个发光模块发光,由简单开、关灯演变成闪烁灯光。
示范发光模块以及延时模块的使用方法。
3.4.2直线运动实验控制两个马达模块直线运动,练习同时设置、控制两个模块的方法。
同学们,你成功完成了上述的两个小实验了吗?通过以上两个简单的编程实验,让我们了解了机器人编程的初步概念,感受了一下如何通过我们自己编写的程序去让机器人的部件按照我们的意愿去执行任务,在接下来的学习中,我们将深入研究机器人控制程序。
参数输入口第四章 模型机器人综合实例在这一章节中,同学们将学习机器人的综合实例,让我们一起通过一个有趣的机器人足球方案来具体看看我们的机器人是怎样一步步搭建起来的!4.1结构搭建搭建之前,请先了解我们的机器人适应规则所规定的尺寸大小,按规则要求足球机器人能够放入一个直径为30cm 的圆桶内,挡球装置的深度不能超过3cm ,有了这个思路,同时为了能够更好的适应比赛和教学,本案例使用了指南针模块,思路基本构思出来,现在开始搭建。
器材准备:“JMC-JY -0409套装”+“JMC-JX-2000简易版足球加强套装”。
工具准备:螺丝刀(中鸣0409套装已配)、补车胎用胶水或502胶水(可选,在五金店买到)4.1.1进攻足球机器人搭建(一)挡球装置的搭建 (a )追加零件如下图:(b)追加零件如下图:(c)追加零件如下图:(d)追加零件如下图:九排连接板(1件)M2.5x48螺栓(2件)M2.5铜螺母(2件)四排连接板(4件)转轮触碰模块(2件)M2.5x31螺栓(2件)M2.5铜螺母(2件)(e )挡球装置仰视图(二)指南针装置搭建 (a )追加零件如下图:(b )追加零件如下图:(注意指南指南针的朝向)M2.5x14螺栓(1件) M2.5铜螺母(1件)指南针模块B (1件)M2.5x31螺栓(1件) M2.5铜螺母(1件)四排连接板(1件)(三)小车主体搭建(a )追加零件如下图:(b )追加零件如下图:(c )追加零件如下图:(d )追加零件如下图:(e )追加零件如下图:(把挡球装置安装在马达上)(f )追加零件如下图:(进一步用螺栓螺母固定挡球装置)M2.5x14螺栓(4件) M2.5铜螺母(4件)M2.5x14螺栓(2件) M2.5铜螺母(2件)挡球装置(1件)M2.5x14螺栓(2件) M2.5铜螺母(2件)指南针装置(1件)(g)追加零件如下图:(安装指南针装置)4.1.2防守足球机器人搭建防守机器人由于为了守门的方便,故意把挡球装置做的很宽,所以防守机器人与进攻机器人结构大同小异,只是挡球装置不同。
(一)挡球装置的搭建:为了更好的找球,我们给防守机器人安装了5个火焰模块,没有安装触碰模块。
(a)追加零件如下图:火焰测量模块(3件)小传感器底座(3件)(b )追加零件如下图:(c )追加零件如下图:九排连接板(3件)M2.5x31螺栓(4件) M2.5铜螺母(4件)(二)小车主体搭建和指南针装置搭建:请参考进攻机器人,这里不再累赘。
(防守机器人最终效果图一)(防守机器人最终效果图二)4.1.3端口接线说明(1)进攻机器人接线示意图如下:(左马达)(右马达) (指南针)(右触碰) (左触碰)(2)防守机器人接线示意图如下:左马达右马达 (右2火焰) (左2火焰)(右火焰) (中火焰)(左火焰)(指南针)4.2机器人足球例程说明4.2.1变量说明以及“靠近球”概念说明(1)进攻足球机器人变量说明(2)防守足球机器人变量说明(3)指南针显示角度以及场地定义角度说明如右图所示意,指南针一般显示角度为0度~360度,如果把指南针对准敌方的球门置一次零,那么垂直敌方球门的那根红线就是0度或者360度的定义线(指南针的详细使用说明可参考我公司的相关文档),由于指南针模块本身的读数误差,我们必须定义角度p1和p2,也就是0~p1以及p2~360是实际上的垂直敌方球门的方向范围,也是我们机器人最想进攻的方向。
一般情况下,定义p1=15度,p2=345度比较合适。
另外我们也要定义角度q1和q2,也就是敌方和我方的角度范围,从图可以看出,红色以及紫色剖面区域是机器人朝向敌方的角度范围,绿色剖面范围是机器人朝向我方的角度范围。
q1一般比90稍大或稍小一点,也可直接定义为90。
q2一般比270稍小或稍大一点,也可直接定义为270。
(4)“靠近球”的概念为了看懂本例程说明,必须弄懂一个概念,靠近球的概念,因为机器人在场地中运行,不可能在任何情况下都让指南针发挥作用,否则的话就失去了意义,我们必须定义一个临界点,让机器人知道自己距离足球的远近,在这里,我们以中间火焰模块检测的足球光值来判断机器人与足球的之间的距离。
在图中,蓝色圆圈就是靠近球的边界线,蓝色圆圈内部就是靠近球的范围,红色剖面线区域是远离球的范围。
边界线定义所要求的中间火焰光值在不同的程序段中有不同的大小,完全靠自己的实际调试来定义,没有一个恒定值,另外这个圆圈范围也只是个大概值,不可能很准确。
(5)“靠近球”,机器人朝向敌方概念示意图,如下图左。
可以用指南针角度表示为:0<b<=q1或者q2<=b<=360(青色剖面线范围) (6)“靠近球”,机器人朝向我方概念示意图,如下图右。
用指南针角度表示为:q1<b<q2(绿色剖面线范围)靠近球的边界线,可以简单的用中间火焰模块的光值大小来判断4.2.2 进攻足球机器人程序(一)进攻足球机器人程序可以简单的分为5个程序段:第一段:对全局变量赋值,让机器人无条件直冲2秒,然后进入一个大while循环,检测光值、触碰、指南针。