SZF型波浪浮标技术指标和主要功能
我国近海波浪浮标的历史_现状与发展_毛祖松

我国近海波浪浮标的历史、现状与发展毛祖松(海军司令部航海保证部,天津 300042)摘 要:回顾了我国波浪测量技术特别是近海波浪浮标技术的发展历程,提出了今后发展的若干建议。
关键词:波浪测量技术;波浪浮标;发展建议中图分类号:P71512 文献标识码:C 文章编号:100322029(2007)022*******1 引言我国是一个濒海大国,拥有18000多km的大陆海岸和近300万km2的可管理的海域,有6000多个(500m2以上的)岛屿和1000多个可以利用的港湾。
近海波浪的观测研究对海洋开发、交通运输、国民经济建设、国防建设及海上舰船活动都有十分重要的作用。
波浪浮标是目前对海洋波浪进行长期、实时、定点观测的主要设备,发展波浪浮标是发展海洋观测的必然需求。
2 我国波浪测量技术的历史和现状从20世纪60年代以来,我国的波浪测量技术特别是近海波浪浮标技术取得了一定的进展,国内一些单位如中国科学院海洋研究所、南海海洋研究所、山东省科学院海洋仪器仪表研究所、国家海洋技术中心、国家海洋局第三海洋研究所、中国海洋大学、中山市探海仪器公司等都进行了比较深入的研究和探索,取得了相应的成果和宝贵的经验。
这一发展过程大致分为三个阶段。
211 第一阶段这一阶段从20世纪60年代中期到70年代中期,是我国波浪测量技术发展的起始阶段,主要是进行技术上的探索,其研究成果投入应用的较少。
1965年,为了适应我国海洋调查的需要,由国家计委、第一机械工业部、水利部、国家海洋局等在青岛组织全国海洋仪器会战,全面开展各种海洋仪器设备研制(共47项课题),其中就有岸用测波仪、岸用波浪自记仪、船用波浪自记仪、接触式测波仪(测波杆)、重力测波仪和船舷测波仪等7种波浪测量仪器设备。
21111 H05型岸用测波仪收稿日期:2007201212 H05型岸用测波仪在海上布设一个浮标,在岸边架设双筒望远镜观测浮标的上下浮动幅度和周期,用以推算波高和波周期。
基于压差法的波向测量方法初步研究
上的波浪在 360
°上均有浪向分布。在某一时刻,不同
得圆周上不同点的压差数据,采用最小二乘法对采集
方向上的波浪能量分布不同,其主波向上的波浪能量
的圆周上多点压差值进行数据拟合,可得出压差值的
分布最大,波浪能量同波高和波周期有关,通过将多个
变化曲线是一条拟合的正弦曲线,找出变化曲线的峰
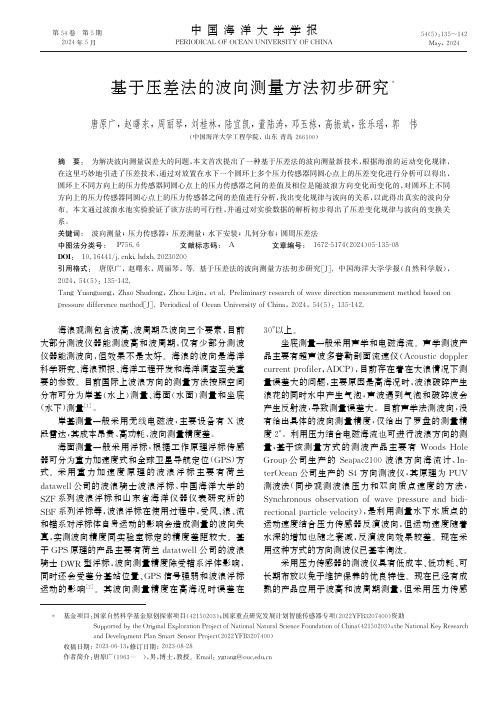
压力传感器在水下布设呈一定几何形状,可测量海浪
方向上的压力传感器同圆心点上的压力传感器之间的差值进行分析,找出变化规律与波向的关系,以此得出真实的波向分
布。本文通过波浪水池实验验证了该方法的可行性,并通过对实验数据的解析初步得出了压差变化规律与波向的变换关
系。
关键词: 波向测量;压力传感器;压差测量;水下安装;几何分布;圆周压差法
中图法分类号: P756.
33
.75 m 的铰接推板式不规则波造波机,最大工作水深
1
.2 m,波高变化范围0
.05~0
.25 m,波周期变化范围
0
.5~2
.5s,在合适周期范围内斜向规则波最大波向角
45
°(最大有效波高 0
.16 m),可模拟规则波、椭圆余弦
波、叠加破碎波、孤立波、国内外常用的频谱(
J谱、
PM
谱、
B 谱、
MPM 谱、中国港工规范谱等)以及自定义频
波浪传播方向是指波浪的来向[5],仪器观测一般
图3 水池中的实验装置
F
i
3 Exp
e
r
ime
n
t
a
ld
e
v
i
c
ei
npo
o
l
g.
规定从北向南(参考地理北或磁北)传播的波向为 0
我国近海波浪浮标的历史、现状与发展

我国近海波浪浮标的历史、现状与发展
毛祖松
【期刊名称】《海洋技术》
【年(卷),期】2007(026)002
【摘要】回顾了我国波浪测量技术特别是近海波浪浮标技术的发展历程,提出了今后发展的若干建议.
【总页数】5页(P23-27)
【作者】毛祖松
【作者单位】海军司令部航海保证部,天津,300042
【正文语种】中文
【中图分类】P715.2
【相关文献】
1.华南近海两浮标点的波浪特征分析 [J], 赵中阔;刘春霞
2.近海遥测波浪浮标的概况及其应用 [J], 周俊德
3.我国近海波浪要素的长期分布 [J], 刘桂海;刘松
4.英国声呐浮标发展趋势:致力于近海水域 [J],
5.海洋波浪能浮标发展现状及前景 [J], 吴明东;盛松伟;张亚群;吝红军;姜家强
因版权原因,仅展示原文概要,查看原文内容请购买。
基于GSM通信的SZF型波浪浮标接收系统

龙源期刊网
基于GSM通信的SZF型波浪浮标接收系统作者:唐原广胡斌
来源:《现代电子技术》2012年第23期
摘要:SZF型波浪浮标是一种能自动、定点、定时(或连续)地对波浪水文要素进行测量的小型浮标自动测量系统。
原本的SZF型波浪浮标系统的监测数据是通过岸站接收机进行数
据接收。
接收机可以符合野外接收需要,但为了能满足不同用户的需要,该文采用PC机接收,并编写友好的人机接收界面,实现数据的接收和使用。
上位机接收系统使用VC++开发,具备数据采集、实时显示、数据存储、数据查询功能。
通过多次的试验检测和拷机测试,通信状况良好,能满足数据接收要求,提高了数据监测效率。
该系统的开发大大地降低了海洋监测过程中的实时监测和后续数据处理的难度,可作为SZF型波浪浮标的配套软件进行推广。
关键词:SZF型波浪浮标;GSM通信;VC++;接收系统
中图分类号:TN925-34文献标识码:A文章编号:1004-373X(2012)23-0112-03。
浮标参数介绍

浮标参数介绍浮标参数介绍浮标是海洋观测和海洋科学研究中常用的一种工具。
在有效监测和收集海洋信息方面起着非常重要的作用。
为了正确地使用浮标以及获取更准确的海洋信息,了解浮标的各项参数就显得尤为重要了。
以下是浮标的几个重要参数介绍:一、浮标重量浮标重量是指浮标在水中的重量,是浮标的一个基本参数。
通过这个参数我们可以判断浮标的尺寸,从而选择合适的浮标。
在测量过程中,浮标的重量受到环境因素(如海水)和浮力的影响。
因此,在测量时需要保持浮标呈静止状态,以确保数据的准确性。
二、浮标材料浮标材料是指浮标制造时所使用的材料,它直接决定了浮标的性能和耐久性。
一般来说,浮标的材料常用的有塑料、金属、橡胶等,这些材料各有优缺点,需要根据具体情况进行选择。
三、浮标长度浮标长度是指浮标中心到水面的垂直距离。
通常情况下,浮标的长度直接影响着浮标的浮力和稳定性。
如果浮标长度太短,则不利于浮标在海面的稳定性,若太长,则会影响浮标的灵敏度。
四、浮标形态浮标的形态特征是指其外观、造型和大小。
普通的浮标一般为球形、柱形、圆锥形和多边形等,常用于静止水域浸泡式的观测。
而在海洋深度较大,海浪较大的情况下,则常使用拖曳式的浮标,这些浮标通常采用更加复杂的形态结构,以确保稳定性和灵敏度。
五、浮标传感器浮标传感器是浮标中最重要的组成部分之一,可以实现对水温、盐度、湍流、波浪高度、风速等海洋参数的实时监测和记录。
浮标传感器的精确度和可靠性对数据准确性具有非常重要的影响,因此在选择浮标时,需要协调考虑传感器的品质和稳定性。
以上就是浮标的一些基本参数的介绍,当然,浮标的参数还有很多,需要根据具体情况进行选择和确定,以确保能够顺利地利用浮标进行海洋观测和研究工作。
多功能波浪浮标的研制_唐原广
用 测 量 摆 轴 转 角 计 算 出 来 的这 个 方 经方 位
,
在
z Y一
型 遥 测 波 浪仪 中 为 波 浪 传 感器 设 计 了
。
,
向 是 相对 测 量 传 感 器 自身 的测 量基 线 的 的地 磁方 向
“
。 ,
一 个 万 向节 式 的垂 摆 系 统
70 7
对 该传 感 器 在 国 家 海
工作
, 。
2 5 km
利用 上 海 交通 大学海 洋工 程 实验室 的 基金 支
。
持 在船模 水 池 完成 了 浮 标模 型 试验 工 作
始 了 多 功能 波浪 浮 标 的 工 作
, , 。 ,
随后 开
天线
,
*
0 当通 讯距离 〕 1
km
时 岸 站接 收 机 应采 用 高增 益 V
,
H F 接收
可 以 说 波浪 表 观 方
,
用 的 能力 以保 持浮 标 的正 浮 姿态 减少 倾 角 的测量 误差
。
机
4
.
。
薄 圆 饼 形 浮 标 的 随 波性 能 较 好 但 是 在 浮 标 尺
,
技术 指标
测 且 参数 指标
测量 参数 波浪 高 度
.
度较小 时 浮 标 容易 发 生 倾覆
较好 而 随波 面 倾斜 的 性 能 差
, ,
,
。
波 浪方 向
波 浪 周期 波浪 温 度
海 水盐 度
一
~
36 ) (
20
单
士
U
形环 系 留结构
。
总 体 结构 如 图
, ,
1
海洋技术▏我国海洋资料浮标观测技术的发展现状与趋势

数据传输间 隔种类 4 1
通信方式种 类 3 3
加拿大 AXYS
NOMAD
15
>95%
1
3
挪威 OCEANOR SEAWATCH 14
>95%
1
3
美国 WHOI
ASIMET
10
>95%
1
3
海洋资料浮标观测参数也是重要指标之一,表 3 给出了我国浮标和国外浮
标观测参数的测量范围和准确度方面的对比。
美国、挪威和加拿大这 3 个在海洋资料浮标制造领域具有较高水平,表 2
列出了我国代表产品与这三个国家 4 款优秀产品的系统参数对比。从表中可以
看出,在监测参数总数方面, 我国与国际上的主流浮标一致,甚至比大部分浮
标的观测参数多;在数据接收率方面,与国外产品一致,都大于 95%,保证了
数据的有效性;在数据传输间隔方面,国外的产品都只有 1 种,而我国的则有
4 种间隔可选,灵活性更好;在数据通信种类方面,我国的浮标与国外浮标相
同,都是采用卫星、 VHF/UHF电台和 GPRS/CDM,A其中北斗卫星短报文通信则
是我国独有的。 表2
系统典型参数对比
浮标种类
中国 挪威 AANDI
型号
FZF DB4700
监测参数 总数 16 16
数据接收 率
>95% >95%
⑵光学浮标
2005 年,在 863 计划的支持下,中科院南海所突破水下光辐射测量的子母
浮标设计和集成、海面和水体表层高光谱辐射测量、水体吸收 / 散射高光谱测
量、锚链式水下多光谱辐射测量、海洋光学仪器窗口防污染等关键技术,研制
了我国第一台光学浮标, 并布放于青岛海域。
X-波段雷达近海海浪频谱反演的神经网络模型

X-波段雷达近海海浪频谱反演的神经网络模型王静;唐军武;何宜军;王鑫;潘玉方【摘要】As a new tool for ocean wave measurement interiorly, X-band radar can be used to provide sea state information and a wave field can be get form an image sequence. However, there are still some problems in the retrieval of wave frequency spectrum and significant wave height ( Hs).A nonlinear regression method was used to fit the in situ wave frequency spectrum and radar one-dimension image spectrum with standard PM, JONSWAP and TMA spectrum, and the basic form and the corresponding spectral parameters can be obtained accurately. Then, a generalized regression neural network model (GRNN) was introduced to retrieve the wave frequency spectral parameters from the one-dimensional radar image spectrum parameters. In the model, the signal — to — noise ratio (SNR) of the image sequence was added to set up a nonlinear relationship with Hs ,and the inversion results with the in situ data and the traditional algorithm result (the establishment of the linear regression equation between SNR and Hs) were compared. The results show that the mean error of spectral parameters and significant wave height are less than 20%, while the mean error of the traditional algorithm is more than 20%.%X-波段雷达作为国内海浪观测的一种新工具,在海浪频谱获取和有效波高反演方面仍存在较多问题.本文利用非线性回归方法,将现场实测浮标数据频谱和雷达一维图像谱分别与标准频谱模型进行拟合,发现浮标频谱和一维图像谱具有标准频谱的特征,能够较准确地获取相应的谱参数.提出了建立由雷达一维图像谱参数反演海浪频谱参数的神经网络模型,同时在模型中加入影像序列信噪比,进而反演有效波高,并将反演结果与现场实测数据和传统算法(建立影像序列信噪比与有效波高之间的线性回归方程)进行了对比,结果表明,获取谱参数的误差和反演有效波高的平均误差在20%以内,而传统算法计算有效波高平均误差在20%以上.【期刊名称】《海洋学报(中文版)》【年(卷),期】2013(035)002【总页数】9页(P43-51)【关键词】X-波段雷达;海浪频谱;有效波高;非线性拟合;神经网络【作者】王静;唐军武;何宜军;王鑫;潘玉方【作者单位】遥感科学国家重点实验室,北京100101;中国科学院遥感应用研究所,北京100101;遥感科学国家重点实验室,北京100101;国家海洋局国家海洋技术中心,天津300112;中国科学院海洋研究所,山东青岛266071;国家海洋局国家海洋技术中心,天津300112;国家海洋局第二海洋研究所,浙江杭州310012【正文语种】中文【中图分类】P731.221 引言X-波段雷达作为海浪观测的一种有效手段,具有全天时全天候工作、安装方便、维护成本低廉等特点,在国外石油平台、水文观测网中得到了广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SZF型波浪浮标技术指标和主要功能
一、测量指标及参数
1 测量指标
2 浮标系统技术参数
二、主要功能
1 工作方式
工作方式分为3种:定时测量方式,连续测量方式和检测工作方式。
定时测量方式分为3小时定时测量方式和1小时定时测量方式。
3小时定时测量方式有标准测量和加密测量两种状态。
标准测量状态浮标在每天02、05、08、11、14、17、20、23时(北京时)自动进行一次测量,每次测量间隔3h,加密测量状态每次测量间隔1h。
每次测量都在整点进行。
标准测量状态方式依据“加密门限值”,浮标自动判别并进行标准测量和加密测量之间的状态转换。
以“十分之一大波波高”特征值作为加密门限值的比较参数,当标准测量测得的十分之一大波波高大于等于预置的加密门限值后,浮标自动转换为加密测量状态;当测得的十分之一大波波高小于预置的加密门限值后,浮标自动转换为标准测量状态。
加密门限值在浮标布放前由用户预先设置。
1小时定时测量方式,浮标在每天24个整时进行测量。
浮标内的传感器在正点前的21分(采样间隔为0.5s)加电,传感器通电后稳定3分钟,工作17分,发射机工作1分,然后传感器被断电,浮标内控制电路进入休眠状态(低功耗),等待下一个测量时次的到来。
连续测量方式是浮标循环地进行“稳定3分、数据采集、发送”过程。
采
样间隔为0.5s的数据采集时间为17分,发射时间1分,循环往复,传感器在每次
通电后需稳定3分;采样间隔为0.25s时的数据采集时间为8分
32秒。
检测工作方式是浮标以0.125s的采样间隔工作,主要用于检测系统的工作状态。
检测时间第一次需7分钟(含3分钟传感器稳定时间),之后每次工作时间为4分20秒。
当设置了浮标的工作方式时,接收处理机也处于相应的工作方式。
接收机在接收时次(正点前)提前6分钟打开接收机,准备接收数据。
2 浮标内波浪数据处理
波浪浮标在每次测量结束后,对波高、倾斜角、方位角的采样数据进行处理,得到波浪特征值最大波高、平均波高、有效波高和十分之一大波波高(HMAX、、HMEAN、H1/3、H1/10)及对应的周期值(TMAX、TMEAN、T1/3、T1/10))和按16个方位角划分的波向出现率。
3 浮标内测量数据传输和存储
每次测量结束后,向接收处理机发送测量的数据。
浮标与接收处理机间采用单向VHF数字通讯时:
浮标向接收处理机传送的数据有:测量时间,波高原始数据(2048点采样值),波浪统计特征值,波向出现率、GPS定位数据及浮标电池电压值。
浮标与接收处理机间采用GSM(FM)短信通讯:
浮标向接收处理机传送的数据有:测量时间,波浪统计特征值,波向出现率、GPS定位数据及浮标电池电压值。
浮标内设有U盘存贮器(USB接口)作为数据存储器。
U盘存
贮器为用户选购件。
浮标内测量数据的存储依据用户预先设置的“存储门限值”进行,浮标自动判别和存储测量数据。
以“十分之一大波波高”特征值作为存储门限值的比较参数。
当每次测得的十分之一大波波高大于等于用户预置的存储门限值时,浮标自动存储所采集的原始数据和特征值数据;当十分之一大波波高小于用户预置的存储门限值时
后,浮标不再存储所采集的原始数据和特征值数据。
如果需要每次测量的数据都进行存储,可以将存储门限值设置为0。
存储内容为: 测量时间,波高、纵倾、横倾、方位4组原始数据,波浪统计特征值,波向出现率及浮标电池电压值。
使用U盘存贮器,拔插U盘一定要在浮标断电的状况下进行;每次使用前必须将U盘存贮器清空,必要的话,可对U盘进行格式化。
U盘每次保存数据后,接收处理机在打印值“V=XX.XX”会打印出一符号“SD”。
如U盘没有工作,打印机不打印“SD”符号。
4 GPS定位功能
浮标内装有GPS定位接收机。
GPS接收机每小时一次自动接收GPS卫星系统对浮标的位置定位数据并发射定位数据。
接收机每小时接收和打印浮标定位位置数据,同时,还将每次收到的定位位置数据与前一次的定位位置数据进行比较,当本次定位位置数据与前一次的定位位置数据之间距离超过设置的距离时,接收机在收到和打印本次定位位置数据的同时,将启动报警声讯器,如需关掉报警,需按复位键即可。
当浮标通过运输后,由于浮标位置发生较大的变化,接收机收到
第一组有效GPS数据后,可能会启动报警声讯器,属正常现象。
由于GPS卫星系统位置和信号强度等原因,有时在自动接收工作时间时会收不到GPS定位位置数据,此时浮标接收机则打印“NO GPS DATA” 。
由于外界环境等因素的干扰,会导致GPS卫星系统定位精度下降,可能会产生误报警,这时应观察浮标实际位置是否有移动。
GPS定位数据不进行存贮。
5 接收处理机数据接收、存储和传输
接收处理机具有数据接收、打印、存储和转送功能。
微型打印机打印观测时间(年、月、日、时、分),波浪统计特征值、波向出现率及浮标电池电压值和GPS定位数据。
接收处理机存储器存储数据的容量可达到1024组测量数据,存贮器存贮的数据有:测量时间,波浪统计特征值,波向出现率及浮标电池电压值,波高原始数据。
存储时,接收处理机自动依存储数据的顺序为存储的数据加上了记录号(自0-1023)。
接收处理机可以通过RS-232串口与PC机相连,在软件的支持下,可以将接收的数据转送给PC算机。
6 电源
浮标内采用直流供电,有7.2V锂离子蓄电池或13.8V锌锰一次性电池。
使用单体为33AH 7.2V锂蓄电池。
每组5(10)块单体,按3小时工作方式在标准测量状态下(GPS关闭下),浮标电池可连续供浮标工作不少于半年(1年)。
使用13.8V锌锰一次性电池。
每组10块单体,按3小时工作方
式在标准测量状态下(GPS关闭下),浮标电池可连续供浮标工作不少于3个月。
使用哪种电池,需在订货时说明。
接收处理机采用交流供电,机内同时备有蓄电池直流电源和自动充电电路。
当交流供电中断时,交流/直流电源可自动切换,蓄电池直流电源在交流电源断电的情况下最大能维持接收机工作3天。
注意:如交流电连续断电3天时,接收机内的蓄电池已耗尽,不可再用接收机内的充电电路给电池充电,需将电池与接收机内部电路断开,采用外部充电设备为电池充电,待充满后,再与内部电路相连接。
浮标和接收处理机内都设有防雷击电路,系统具有一定的防雷能力。
三、系统组成
SZF波浪浮标系统由浮标体部分和接收处理机部分组成。
1 浮标体部分起着数据采集、处理和发送的作用。
浮标体内安装了波浪传感器、方位传感器;浮标数据采集、处理和控制电路;数据发射机、GPS定位接收机和U盘存贮器;电池。
浮标法兰盘上安装了发射天线和锚灯和GPS定位接收天线。
浮标体部分总体结构见图一。
浮标体内的仪器舱用不锈钢制作,外壳用玻璃钢材料制作,外壳与仪器舱之间填充发泡剂。
为海洋监察船和海洋调查船舶专门设计和生产的SZF型波浪浮标,浮标体外壳与仪器舱为一体,全部采用不锈钢制作。
在浮标体法兰的边缘设有一个密封插座口,为浮标内部工作电源供电开关,是一个2芯的插座、波浪浮标在工作期间可以不打开浮标
法兰盘,即可以对浮标工作电源进行通、断的操作。
在浮标法兰盘上不装配GPS定位接收天线,除安装了发射天线和锚灯外,还装有一个密封插座口,为浮标与接收机的通讯插座,是一个5芯的插座,波浪浮标在工作期间可以不打开浮标法兰盘,即可以连接接收机对浮标的时钟及工作方式进行调整的操作;
2 接收处理机起着接收、处理浮标发送数据的作用。
其中安装了数据处理和控制板;数据接收机;接收天线;微型打印机;数据存储器;另外具备与计算机通讯的RS-232接口,可将数据实时传送给计算机。
数据接收处理机外型为一台式机箱,尺寸不大于400×400×160mm,重量不大于15kg。
SZF型波浪浮标,包含:GPS定位功能,浮标体采用复合材料组成(三层防护措施),高性能可重复使用的锂离子动力电池(海上工作时间达1年,充电后可反复使用),浮标内带数据存贮器,接收机带数据存贮器,接收机可监测浮标存贮器工作状态;采用手机短信通讯方式;配不旋转钢丝绳一根。
服务要求:免费上门安装调试及培训,终身保修。