基于ARM的数字式自动舵设计
基于ARM的自主水下航行器舵控制系统设计

2 硬 件 设计
2 1 与上 位机 的通信 .
舵 机控 制 器 通 过 C AN 总 线 与 自动 驾 驶 仪 通
线 与 自动 驾 驶 仪 通 信 ,L C 1 9内 置 两 路 独 立 的 P 21 C AN 总 线 控 制 器 ,使 得 该 节 点 体 积 小 ,功耗 低 、
抗 干扰 性好 。
C AN通 信模 块 接 收 到指 令 后 ,由微 控 制 器 输 出两 路P WM 信号 ,通 过 功率 驱动和 功率 放大 电路 分别
基 于 ARM 的 自主水 下航 行 器 舵 控 制 系统 设 计
董 荔 宁 ,严 卫 生 ,杨 立
( 北 工业 大 学 航 海 学 校 ,西 安 西 707) 1 0 2
摘 要 :舵机 控 制器 是 自主水 下 航 行器 ( AUV) 中 的重要 组 成部 分。 文 中介 绍 了基 于 AR 的 M 舵机 控 制 系统 。该 系统选 用 L C 1 9嵌 入 式 微处 理 器 作 为控 制器 ,结构 简 单 、可 靠 。 自动 驾 驶 P 21 仪 通过 C AN 总 线 与舵 机控 制 系统通 信 ,实现 了对舵 的分 布式 控制 。 关键 词 :水 下航 行器 ;A RM ;C AN 总 线 ;舵 机控 制 系统 ;设 计
0 引 言
自主水 下航 行 器作为 一种 军 民两用 的水 下运 载
器 ,近 年来 取得 了长 足 的发展 。舵 机是 水下 航行 器
控制舵 机 的方 向和俯 仰角 度 。舵机 的位 置反 馈通过 自带 的反 馈 电位 计 检 测 角度 信 号 ,送 入 A/ D转 换 器 ,与上 位机给 出的控制 指令 形成 闭环控 制 ,并通 过 CA 总 线实时 反馈 给 自动 驾驶 仪 。 系统 框 图如 N
基于arm芯片的智能婴儿床

• 108•ELECTRONICS WORLD ・探索与观察当今社会的竞争激烈,年轻的父母白天要工作晚上还要照顾宝宝,这已经影响了他们的休息以及工作。
如何既能减轻父母的负担,又能够照顾好宝宝休息成为亟待解决的问题。
睡眠对于婴儿的成长发育起着重要的作用。
一个良好的睡眠环境是睡眠质量的保证,传统的摇床只是提供一个睡眠地方,并未监测和改善婴儿的睡眠环境。
针对以上问题,设计了本款“基于ARM 芯片的智能婴儿床”,旨在为婴儿提供一个舒适、健康的睡眠环境,同时解决家长带宝宝的经验少,且工作节奏快,时间少,缺乏精力的相关知识和经验的问题。
1 系统总体设计该项目是以普通婴儿床为基础,进行二次开发,由普通婴儿床为蓝本,搭载摄像头模块、舵机模块、烟雾气敏传感器、湿度模块、温度传感器、电源、声音采集器、通信模块及音乐播放模块等。
对宝宝睡眠环境和睡眠质量进行监测,使婴儿在一个温暖舒适的环境成长。
如图1。
2 主要硬件设计(图2)(1)采用数字舵机,负责摇晃床体,结构简单,仅vcc 、gnd 以及信号线三根接线,使用方便。
西北民族大学电气工程学院 陶 腾 谭传明 杨辉春 苏 乐李远航基于ARM芯片的智能婴儿床ATK-RM04传送到相应上位机,实现实时监测。
图3 主要程序流程图舵机模块实现婴儿床的摇床功能,将舵机和床体相连接,通过舵机的转动,婴儿床也会相对应的速度摇动,根据代码中pwm 的控制,舵机可以有多种速度,婴儿床也将有不同程度的摇晃,可以达到与人工摇床相同的效果,让孩子舒适进入睡眠。
根据单片机自带的定时器功能进行定时,与舵机协同作用,可以做到家长设置好,系统自动定时运行,达到让孩子睡眠的效果,解放父母的双手。
婴儿床上搭载声音传感器LM386,当LM386检测到婴儿的哭声时,其电压信号发生变化,通过单片机对其电压的变化,得知婴儿已醒来,单片机会对舵机进行上电,舵机开始运行,安抚刚醒来的婴儿,与此同时利用SIM800C 将发送通知给手机,提醒家长婴儿已醒,需要前往照顾。
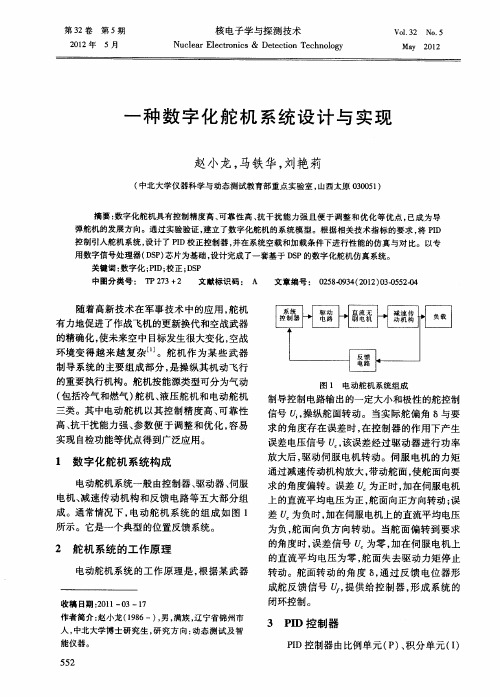
一种数字化舵机系统设计与实现
( 中北 大学仪器科 学与动态测试教育部重点 实验室 , 山西太原 00 5 ) 30 1
摘要 : 数字化舵机具 有控制精度高 、 可靠性 高 、 干扰 能力强且 便 于调整 和优化 等优点 , 抗 已成 为导 弹舵机的发展方 向。通过实验验证 , 建立了数字化舵机 的系统模型 。根 据相关技 术指标 的要 求 , PD 将 I 控制引入舵机系统 , 计了 PD校正控制器 , 设 I 并在系统空载和加载条件 下进 行性 能的仿 真与对 比。 以专 用数字信号处理器 ( S ) 片为基础 , D P芯 设计完成 了一套基于 D P的数字化舵机仿 真系统 。 S
Ⅱ £ [()+1 ()= e£ /
J
f £ t × et d e) + (d d( /t ) ]
() 1
图 2 无 刷 直 流 电机 动 态 结 构 图
式 中积 分 的上 下 限分 别 是 0和 t 因此 它 。
方式。滚珠丝杠和齿轮副相结合的传动具有体 积重量小 、 精度高 、 率高、 效 易排布等优点。滚 珠丝杠计算如图 3 其数学模型的建立如式( ) , 4
求的角度存在误差时, 在控制器的作用下产生 误差电压信号 , 该误差经过驱动器进行功率 放大后 , 驱动伺服 电机转动。伺服 电机的力矩 通过减速传动机构放大 , 带动舵面 , 使舵面向要
求 的角 度偏 转 。误差 为正 时 , 在伺 服 电机 加 上 的直 流平 均 电压 为正 , 面 向正方 向转动 ; 舵 误
作者简 介 : 赵小龙 (9 6一) 男 , 18 , 满族 , 辽宁省锦州 市 人, 中北大学博士研 究生 , 究方 向: 研 动态 测试及 智
能仪器 。
基于ARM的随动操舵控制系统的研制

比较广 泛 , 但对 于大 部分 中小 型船舶 , 由于 自动操
舵 仪 价 格 太 高 , 主要 以 应用 随动 操 舵 仪 为 主 。 仍 国内随动 操 舵 仪 控 制 系 统 的技 术 大 部 分 比较 陈 旧 , 其显 示仪 表还 以模 拟仪 表为 主 , 尤 因此设 计基 于 AR 的新 型 随动操 舵仪控 制 系统 。 M
2 S h o fC n rlS in ea d En ie r g h n o gUnv r i ,Jn n 2 0 6 . c o l o to ce c n gn ei ,S a d n iest o n y ia 5 0 1,Chn ) ia
Ab ta t s r c :Ac o dn o t e p o lm fo s lt e h o o y a o t wh e t e i g i s r me t h o to c r i g t h r b e o b oe e t c n l g b u e ls e rn n t u n ,t e c n r l s s e o e lse rn a e n AR sd sg e .Th o to y t m o l c iv a d s e r g,wh e y tm fwh e t e ig b s d o M wa e i n d ec n r l s e c u d a h e e h n t e i s n el s e rn n wi h n r m e l t e i g t a d s e rn .F rh r o e h n e f c u c i n wa n r a e t e i g a d s t i g fo wh e e rn O h n t e i g c s ute m r ,t ei t r a e f n t s i M 的 随动 操 舵 控 制 系统 的研 制
【精品】自动舵控制系统设计
自动舵控制系统设计船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动操舵仪是总结了人的操舵规律而设计的装置,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备.系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向与实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;调节对象—船;舵角反馈机构等。
自1922年自动舵问世到今天,代替人力操舵的自动舵的发展确实取得了长足的进展,在相当程度上减少了人力,节约了燃料,降低了机械磨损,但是距离真正意义上的操舵自动化还有相。
当大的距离。
一国内外研究现状自70年代起,国内一些科研院所、高校开展自动舵的理论与开发工作,并取得了不少成果,一些航海仪表厂家也独立或与研究所、高校合作开展了自动舵的试制和生产,其产品以模拟PID舵为主。
目前虽然国产自适应舵已经投入实船使用,但效果并不明显。
智能控制舵还处于理论研究阶段,还没有产品化。
航迹舵基本上也处于研究阶段,还没有过硬的产品。
目前国外市场上有多种成熟的航向舵、航迹舵产品,其控制方法大多为比较成熟的自适应控制,例如日本Tokimec公司的PR—8000系列自适应自动舵、德国Anschuz公司的NAUTOCONTROL综合系统中的自动舵、美国Sperry公司VISIONTECHNOLOGY系统中的自适应自动舵等。
近几年发展起来的智能控制及其它近代控制在自动舵上应用尚处于方案可行性论证及实验仿真阶段,还有待于进一步工程实现研究。
我国对自适应舵的研究起步较晚,自80年代以来,有关单位开展了对自适应舵的研究工作,发表了一些设计方案,仿真研究结果和产品。
基于STM32的舵机控制系统毕业设计论文

基于STM32的舵机控制系统摘要随着越来越多的高科技产品逐渐融入了日常生活中,舵机的控制系统发生了巨大的变化。
单片机、C语言等前沿学科的技术的日趋成熟与实用化,使得舵机的控制系统有了新的的研究方向与意义。
本文描述了一个由STM32微处理器、舵机、LCD 显示器、键盘等模块构成的,提供基于STM32的PWM信号舵机的控制系统。
该系统采用STM32微处理器为核心,在MDK的环境下进行编程,根据键盘的输入,使STM32产生周期性PWM信号,用此信号对舵机的速度及转角进行控制,并且通过LCD显示出数据。
结果表明该系统具有结构简单、工作可靠、精度高等特点.关键词:STM32微处理器;舵机系统;LCD显示;PWM信号AbstractAs well as the high-tech products gradually integrated into the daily life,servo control system has undergone tremendous changes.SCM and C language of the frontier disciplines such mature technology and practical,Make steering control system is a new research direction and meaning.This paper describes a STM32 microprocessors, steering, LCD display and keyboard, etc.Based on the STM32 servo control system of PWM signal,This system uses STM32 microprocessor as the core, MDK in the environment, according to the keyboard input programming, STM32 produce periodic PWM signal, with this signal to the velocity and Angle of steering gear control, and through the LCD display data. The features of the simple hardware, stable operation and high precision are incarnated in the proposed system.Keywords:STM32 microprocessors; Steering system; LCD display;pulse width modulation signal目录第1章绪论 (1)1.1 课题背景 (1)1.2 课题的研究展望 (2)课题任务及要求 (2)1.3 课题内容及安排 (3)第2章硬件设计 (4)2.1 STM32微处理单元 (4)2.2 舵机 (8)2.3 LCD显示器 (9)2.4 时钟电路的制作 (10)第3章软件设计 (12)3.1 STM32固件库简介 (12)3.2 软件的总体设计 (13)3.3 时钟初始化子程序 (14)3.4 I/O口初始化子程序 (17)3.5 PWM信号子程序 (17)3.6 A/D转换初始化子程序 (18)3.7 LCD显示子程序 (19)第4章系统调试 (21)4.1 调试方案 (21)4.1.1 硬件调试方案 (21)4.1.2 软件调试方案 (21)4.2 故障调试及解决方法 (22)4.3 联调结果 (22)结论 (26)社会经济效益分析 (27)参考文献 (28)致谢 (29)附录I 电路原理图 (30)附录Ⅱ程序清单 (35)第1章绪论舵机(servo motor),又名伺服电机,主要是由外壳、电路板、马达、减速齿轮和电位器构成。
自动操舵仪研制与实现浅谈

自动操舵仪研制与实现浅谈摘要自动操舵仪是舰船的航行控制的重要设备,对于舰船航行的安全性和经济型起到决定性作用。
由于不同舰船模型的不同,吨位的不同,航行水域不同等导致控制性能的不足,无法完成既定任务或是不能按时将货物运送目的地。
因此研制一款适应不同模型、不同吨位及海况的自动舵操舵仪势在必行,具有重要的战略意义及经济效益。
关键词:自动操舵仪;工作原理;设计2、主要功能用途自动操舵主要用用于舰船的转向控制,一般具有简操、随动、航向、迹向及航迹操舵等功能,同时具有完备的航行状态指示和报警功能。
简操:通过手柄直接控制打舵;航向:通过设定新航向,来输出指令舵角,自动保持设定的指令航向;迹向:结合当前GPS信号,设定新航向后输出指令舵角来保持设定的指令航向;航迹:自动跟踪外部航行计划设备设置的计划航线。
采用ARM芯片为控制核心,其优点是功能完备、启动迅速、控制可靠,整套仪器具有智能化程度高、可靠性好、使用维护方便等特点。
说明:航向、迹向、航迹等工作模式一般使用于较开阔的水域,简操、随动等工作模式一般适用于进、出港等狭窄航道。
3、主要性能指标1)电源电压:AC380V 50Hz,两路,DC24V 一路;2)操舵范围:±35º(标准);3)随动操舵灵敏度:≤1º;4)航向操舵最高灵敏度:≤0.5º航差角;5)航向复示精度 0.1º;6)航向修正范围:0º~±180º,可连续修正。
4、系统组成及工作原理主仪器主要由报警单元、控制单元、罗经复示单元、随动手轮单元、显控单元、泵组选择单元、操舵方式装换单元、简操单元、舵角复示单元及状态设置单元等组成。
自动操舵仪采用ARM芯片为控制核心,采用模糊自适应控制算法,CAN总线进行通信,标准模块化设计,双通道冗余设计,工作时可以通过人为设置指令舵角或是预设航向、或是通过电子海图等航迹规划设备输出预设航线信息进入系统,系统结合当前海况、装载、船舶特性等进行运算、处理后输出控制电磁阀开关方向的信号,即控制液压系统的油压方向从而带动舵机舵叶的往复运转,从而达到改变船舶航向的目的。
基于ARM的小型无人机飞行控制器设计

无人机在飞行过程中, 为了实现一定的飞行任务, 飞行控制 器首先要能稳定飞行的姿态、速度和高度, 使其按预定的航路飞 行; 还要能控制飞行 的 姿 态 、速 度 和 高 度 , 使 其 能 按 照 地 面 工 作 人员的遥控指令来调整, 适应飞行任务的改变, 并且能够自适应 调整来适应飞行环境的变化。随着无人机任务的不断复杂, 对 无人机性能的要求越来 越 高 , 不 仅 要 求 飞 行 距 离 远 、高 度 高 、续 航时间长, 而且要求无人机飞行速度快和载荷多, 同时具有故障 自 诊 断 、故 障 自 修 复 、自 主 飞 行 等 等 诸 多 功 能 。 因 此 无 人 机 上 的 飞行控制器不仅仅保持和控制无人机飞行,
RS- 232 或 者 RS- 485 接 口 , 而 S3C2410 片 内 集 成 了 3 个 UART
接 口 , 不 能 满 足 系 统 的 需 要 。 选 用 专 用 串 口 扩 展 芯 片 LP2328,
它 可 以 把 一 个 UART 串 行 口 扩 展 成 3 个 全 新 的 全 双 工 UART
飞行控制器功能无人机在飞行过程中为了实现一定的飞行任务飞行控制器首先要能稳定飞行的姿态速度和高度使其按预定的航路飞还要能控制飞行的姿态速度和高度使其能按照地面工作人员的遥控指令来调整适应飞行任务的改变并且能够自适应调整来适应飞行环境的变化
您的论文得到两院院士关注 文章编号:1008- 0570(2007)10- 2- 0133- 03
合, 这样将获得比较高的性价比。SDRAM 由两片 K4S561632 组
成共 64M 字节, 工作 32 位模式下; NAND FLASH 采用的是 64M
字节的 K9F1208, 可兼容 16M、32M、128M 字 节 ; NOR FLASH 采
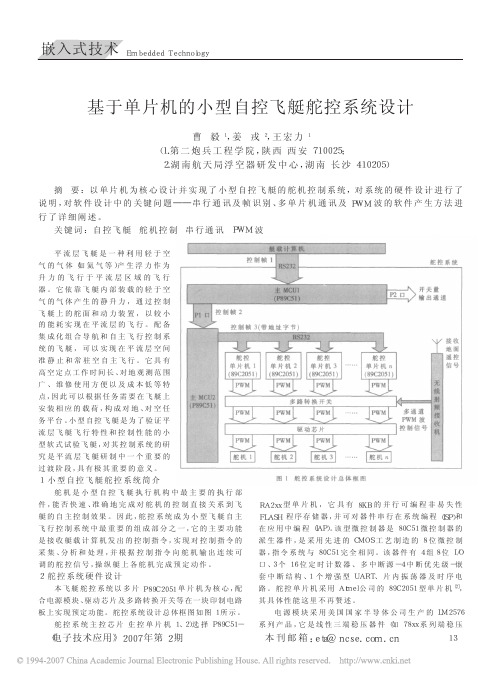
基于单片机的小型自控飞艇舵控系统设计
前面加上地址, 依次由串口发送给下位舵控单片机。
置 标 志 位 flag3 ; 之 后 依 据 同 样 的 方 法 判 断 帧 尾 第 二 个 字
舵控单片机的主要任务是识别控制指令和地址指 节是否来到, 如果已接收到, 则置该帧数据已完整接收到
令 , 并 根 据 收 到 的 控 制 指 令 (舵 机 占 空 比 信 号 )产 生 PWM 标 志 flag4 , 同 时 接 收 状 态 归 零 , 重 新 开 始 等 待 帧 头 字 符 。
在该舵控系统的设计中, 串行通讯占有很重要的地
是其中的安全性设计部分, 即当地面检测到艇上自动控 位, 如艇载计算机与主单片机 1 之间的通讯过程。下面
制系统已经失效时, 为确保飞艇安全返回, 需要将控制 以主单片机 1 的串口接收程序为例, 对串行通讯的实现
方式转至遥控方式。如图 1 所示, 当艇载计算机发生故 过程加以说明。
嵌入式技术 Embedded Technology
主 MCU2 (P89C51 )
控制帧 3(带地址字节)
RS232
接收
地面
舵控 单片机 1 (89C2051 )
舵控 单片机 2 (89C2051 )
舵控
舵控
单 片 机 3 …… 单 片 机 n
(89C2051 )
(89C2051 )
遥控 信号
PWM
PWM
PWM
PWM
无
线
PWM
多路转换开关
PWM
PWM
艇 的 自 主 控 制 效 果 。 因 此 , 舵 控 系 统 成 为 小 型 飞 艇 自 主 FLASH 程 序 存 储 器 , 并 可 对 器 件 串 行 在 系 统 编 程 (ISP)和
基于ARM的小型船舶自动操舵系统的设计与实现

基于ARM 的小型船舶自动操舵系统的设计与实现 0基于ARM 的小型船舶自动操舵系统的设计与实现2009年11月10日内容提要:介绍小型船舶自动舵系统的自主研发设计。
该设计选用Philips 公司的ARM LPC2214控制器、大电流MOS 管IRF9540N 、上海直川电子科技有限公司生产的ZCC04型磁罗经转换器等产品,并利用常开常闭继电器解决了手动-随动操舵转换,设计485总线接口电路解决舵角信号的传输。
某渔船试用证实,该设计可靠性高、稳定性好,节能效果明显,有望改变国内小型船舶自动舵产品基本依赖进口的局面。
关键词:船舶 自动操舵装置 手动-随动转换 舵角信号传输 设计0引言自动舵是船舶控制系统中不可缺少的重要设备。
它可以通过航向设定使船舶航迹更接近直线,避免了“蛇行”从而更节能更经济,还能节省人力资源。
我国在从70年代就开始自动舵的研究,并取得了一定的成就,但国内自动舵的研究侧重于理论方面的算法仿真,很少做出实际产品。
迄今为止,国内船舶安装的自动舵基本完全依赖进口。
因此,我们自行开发了基于ARM 的小型船舶自动舵系统,包括手动(应急)操舵、随动操舵、自动操舵三部分。
1自动舵系统的工作原理及其系统结构设计船舶自动舵时,船舶航向控制系统模型一般采用如下所示的野本模型式中:ψ是航向;δ是舵角;T 和K 是模型的参数。
T 和K ,一般表示为:T=T'·L/V 和K=K'·V/L其中:V 是船速;L 是船长;T'和K'是模型的无因次系数,是船型参数和装载状态等的函数,一般由海上实船试验获得。
[1]根据上列舵角与航向关系式,设计自动舵闭环系统结构框图,见图1。
随动操舵部分,不包括磁罗经传感器参与的外环,只包括角度传感器参与的内环,是单闭环系统。
其工作原理是:①角度传感器检测实际舵角信号;②控制器比较实际舵角信号与给定舵角信号(偏航角)得出它们的偏差;③控制器根据偏差控制电磁阀驱动电路的相应电磁阀开闭;④液压舵机改变舵的方向和角度,直至实际舵角与给定舵角信号二者偏差为零。
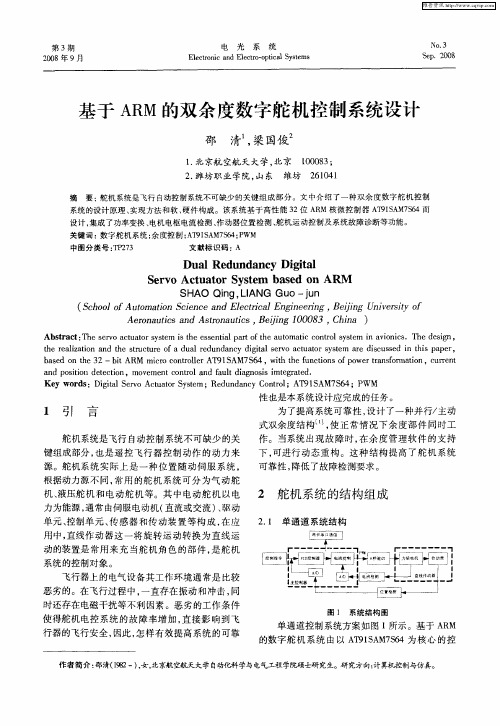
基于ARM的双余度数字舵机控制系统设计
键 组成部 分 , 是 遥 控 飞行 器 控制 动 作 的 动力 来 也
源 。舵机 系统 实 际上 是 一 种 位置 随 动伺 服 系 统 ,
根 据动力源 不 同 , 用 的舵 机 系统 可 分 为气 动 舵 常
机、 液压舵 机 和 电动舵 机 等 。其 中 电动 舵 机 以 电 力为能源 , 通常 由伺 服 电动机 ( 直流或 交流 ) 驱动 、
性也是 本系统设 计应完 成 的任 务 。
1 引 言
舵机 系统是飞行 自动 控制 系统 不可 缺少 的关
为 了提 高系统 可靠性 , 计 了一种 并行/ 设 主动 式双余 度结 构 使 正 常情 况 下余 度 部 件 同 时工 ¨,
作 。当系统 出现 故 障 时 , 余 度 管理 软 件 的支 持 在 下, 可进 行 动态 重 构 。这 种 结 构 提高 了舵 机 系统
a d p st n dee t n。mo e ntc n o n a l d a no i mtga e n o ii tc i o o v me o t la d fu t ig ssi e r td. r
K e r : Di i lS r o Acu trS se ;Re u d n y Co to ;AT91 y wo ds gt ev t ao y tm a d n a c n rl SAM7 6 S 4;PW M
设计 , 集成 了功率变换 、 电机电枢 电流检测 、 作动器位置检测、 舵机运动控制及系统故障诊断等功能。
关键 词 : 字舵 机 系 统 ; 度控 制 ; q S M7 6 P 数 余 A 91A S4;WM
中图 分 类 号 :P 7 T 23 文献 标 识 码 : A
舵机ARM控制系统与测试系统设计

精品文档供您编辑修改使用专业品质权威编制人:______________审核人:______________审批人:______________编制单位:____________编制时间:____________序言下载提示:该文档是本团队精心编制而成,希望大家下载或复制使用后,能够解决实际问题。
文档全文可编辑,以便您下载后可定制修改,请根据实际需要进行调整和使用,谢谢!同时,本团队为大家提供各种类型的经典资料,如办公资料、职场资料、生活资料、学习资料、课堂资料、阅读资料、知识资料、党建资料、教育资料、其他资料等等,想学习、参考、使用不同格式和写法的资料,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!And, this store provides various types of classic materials for everyone, such as office materials, workplace materials, lifestylematerials, learning materials, classroom materials, reading materials, knowledge materials, party building materials, educational materials, other materials, etc. If you want to learn about different data formats and writing methods, please pay attention!舵机ARM控制系统与测试系统设计1. 前言舵机控制系统广泛应用于各种领域,如机器人、航空航天、船舶和汽车等。
基于ARM的智能数字调节器设计的开题报告

基于ARM的智能数字调节器设计的开题报告一、选题背景及意义随着科技的不断发展,智能数字调节器被广泛应用于各种工业控制领域。
智能数字调节器可以实现对电机转速、电压、电流等参数的控制,使工业生产更加方便、高效、准确。
ARM是一种应用广泛的芯片,具有低功耗、高性能、易开发等优点,被广泛用于工业控制领域。
本课题将基于ARM芯片设计一款智能数字调节器,以满足工业控制的需求。
二、发展现状综述目前市面上已经有一些智能数字调节器产品,它们的工作原理基本类似,都是通过对电机的电压、电流进行控制来达到调节电机转速的目的。
这些产品的控制方式主要有开环控制和闭环控制两种。
开环控制是指将设定值输入控制器,然后输出控制信号直接控制电机,由于没有反馈,控制精度较低。
闭环控制则是在开环控制的基础上增加反馈控制,实时监测电机的实际转速、电压、电流等参数,不断对控制信号进行调整,以达到更高的控制精度。
三、研究内容与研究目标本课题将基于ARM芯片设计一款智能数字调节器。
具体的研究内容包括以下几个方面:1、ARM芯片的选型和硬件设计。
2、数字信号处理算法的研究,包括P、PI、PID等控制算法的实现。
3、软件系统的设计,包括控制逻辑的设计、界面设计等。
研究目标是实现一款基于ARM芯片的智能数字调节器,具有以下特点:1、控制精度高,调节范围广。
2、界面友好,操作简单方便。
3、可靠性高,稳定性好。
四、研究方法与技术路线本课题的研究方法主要是理论研究和实验研究相结合。
通过对ARM芯片的选型和硬件设计,实现数字调节器的基本功能。
通过实验研究,不断优化控制算法,提高控制精度。
同时,通过界面设计和软件系统的开发,提高用户使用的舒适度和便捷性。
具体的技术路线如下:1、选型和硬件设计:根据需求进行ARM芯片的选型,设计相关的硬件电路,如电源电路、接口电路、采样电路等。
2、控制算法实现:研究数字控制算法,实现P、PI、PID等控制算法。
3、界面设计和软件系统开发:根据用户需求设计界面,开发相关软件系统,实现数字调节器的控制和监测功能。
一种基于ARM的小型渔船液压舵机控制系统的设计

6 . 电磁换向阀;7 . 三位四通电磁阀;8 . 液压锁;9 . 液压转向器 1 0 、1 1 . 液压缸;l 2 . 推杆平衡板;l 3 . 舵轴 ;l 4 . 舵角指示器
图 1 舵 机 液 压 控 制 系 统 原 理 图
务l l I 5 似
一
种基于A R M的小 型渔船液 压舵 机控制系统的设计
A desi gn of h ydr aul i c s t eer i n g gear cont r ol s ys t em bas ed on A RM f or sm al l ishi f ng v ess el
D o i :1 0 . 3 9 6  ̄ l / J . i s s n . 1 0 0 9 —0 1 3 4 . . 2 0 1 3 . 1 1 ( 上) . 4 1
0 引言
目前 , 北 部 湾 地 区 5 0 0 吨 以下 的 小 型 渔 船 有
位 四通 电磁 换 向阀 加 液 压 锁 的模 式 ,很 好 地 解 决 了 以上 问题 ,并 且 提 高 了液 压 系统 的稳 定 性 和 安
1 . 2 液 压 系统 的原 理分析
按照 《 钢 质 海 船 入 级 与 建 造 规范 》 中规 定 ,
通 过 阀芯 与 阀 口的遮 盖 来 实 现 ,滑 阀不 可 避 免 的 会 产 生泄 漏 , 出现 风 浪 时泄 漏 会 更 加 严 重 ,导 致 舵 角 不 能 长 时 间保 持 。有 些 系 统 采 用 。型 中位 的 三 位 四 通 电 磁 换 向 阀 加 液 压 锁 的 模 式 , 在 液压 阀 换 回 中位 时 ,液 压 锁 的 控 制 油 口可 能 存 在一 定 压
基于ARM的开放式数字运动控制器的设计
一
王 强等 : 于 A M 的开放 式数 字运动控 制 器的设计 基 R
第 3期
个智能节点 , 通过实时控制网络与主站连接。在整个数控系统 R O 之上的。通过应用程序将设计分割为若干独立的任务 , TS 使
中轴伺服控制器完成伺服轴控制功能 , 同时要具备前端的误差补 用 R O 也会使得应用程序的设计大为简化。 TS 使用可剥夺 的内
x
设备控制和管理 、 通讯控制和管 轴伺服控制器的结构框图 , 如图 2 所示。 由轴运动控制器 , 电 任务 。该层分为五大功能模块 : 理、 1 0控制和管理以、 插补任务管理 以及多任务管理 。 机控制器和功能率模块及其他一下检测和接 口电路构成。 设计的数控 系统采用 S R O E C S作为实时控制网络的连接方 应用层主要完成轴控制系统定义的应用功能 。 如对 S R O ECS
一
理层和应用层。轴控制系统软件设计框架 , 如图 3 所示。
轴伺服控制系统
个伺服轴的控制情况, 如图 1 所示 。轴伺服控制器将轴控
制功能与伺服电机驱动功能集成在一起 ,具有独立运行能力 , 具
备轴插补和轴运动补偿功能。 在实际应用中根据控制需要可以对 不同的轴使用不同的运行模式 。 此外每个轴还有一个主运行模式 和三个辅助运行模式 ,控制单元可 以在运行过程 中切换运行模 式。在各个模式下 , 伺服装置反馈的实 际值 、 , 、 都可以通过
轴运动数据处理 , 设备运行状况的监控 , 轴插补参数 式 ,轴伺服控制器采用 A M7高性能的微处理器作为核心控制 协议的解读 , R 的计算 , 故障处理以及各部分控制程序的下载和升级等。 单元 , 使用可编程器件扩展处理器的 1 口, 0端 以适应轴伺服控制
一种船舶自动操舵仪语音交互器的设计

收 稿 日 期 :2019-04-26 作 者 简 介 :贾 玉 柱 ,男 ,讲 师 ,研 究 方 向 :船 舶 电 气 。
88
一种船舶自动操舵仪语音交互器的设计 贾玉柱 等
2.1 犛犜犕32犉407犞犌犜6 控 制 器 电 路
STM32F407VGT6是 意 法 半 导 体 公 司 基 于 高 性 能 的 ARM? Cortex? - M432-bit RISC core内核,工 作 频 率 高 达 168MHz[4]。Cortex- m4核心具有 单 精 度 的 浮 点 数 运 算 单 元 FPU,支 持所有单精度数据处理指令和数据类型。它还实 现了一套完 整 的 DSP 指 令 和 一 个 内 存 保 护 单 元
机、POS机、公交车语 音 报 站 器、智 能 仪 表 等 设 备 中 。 功 能 如 下 :支 持 任 意 中 文 文 本 、英 文 文 本 的 合 成,并 且 支 持 中 英 文 混 读;支 持 语 音 编 解 码 功 能, 用户可以使用芯 片 直 接 进 行 录 音 和 播 放;支 持 语 音识别功能;芯片内 部集 成 80 种常 用提 示音 效; 支持 UART、I2C 、SPI三 种 通 讯 方 式;支 持 多 种 控 制 命 令 ;支 持 多 种 方 式 查 询 芯 片 的 工 作 状 态 。
图 2 STM32F407VGT6 核 心 电 路
该 电 路 由 STM32F407VGT6 的 核 心 电 路 、复 位电路、以 太 网 通 信 电 路、双 CAN 通 信 电 路 组 成 ,核 心 电 路 完 成 与 语 音 芯 片 的 交 互 ,并 且 运 行 船 舶 控 制 指 令 的 运 行 策 略 ,根 据 语 音 设 备 ,把 控 制 指 令翻 译 到 船 舶 自 动 操 舵 仪 内 部 的 CAN 网,或 信 息通信以 太 网 上。 复 位 电 路 起 到 上 电 复 位 CPU 的作用。以 太 网 通 信 电 路 主 体 物 理 芯 片 采 用 DP83848与 CPU 采用 RMII方式交 互 数 据[5],适 用于信 息 通 过 以 太 网 交 互 的 自 动 操 舵 仪 中。 双 CAN 电 路 主 体 物 理 芯 片 采 用 具 有 隔 离 作 用 的 ADM3053,适用于通 过 CAN 网 交 互 的 自 动 操 舵 仪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词 : R 自动操舵仪 ; A M; 野本模型 ; 模块化设计
中 图分 类 号 :H14:6 6 1 T 3 U 6 . 文 献标 识码 : A 文章 编 号 :0 1 4 5 (0 0 0 0 6 0 10 — 5 1 2 1 )9— 0 5— 4
De i n o i ia u o io a e n ARM sg f d g t la t p l tb s d o
Ab ta t s r c :Ai n t h r b e o uo i t o n i u o n r sn n o e in tc n lg mig a e p o lm fa tp l r l g t t of ao me i o r u t u ig a a g d sg h oo y,a mo u a e in me h d frdg n c y l e d l r sg t o i— d o i u o i t a e n ARM a r s n e n h or s o d n x e me tlr s l r ie .F rt ,t e n moo mo e si t d c d t a t pl s d o l a ob w sp e e td a d t e c r p n ig e p r na e u t wee gv n e i s i l h o t sy dl wa n r u e o a d t e c n r l rn i l o es se w sa ay e .T e e ma n f n t nmo u e e e p e e td a c r i g t y t m ig a n h o t i cp e ft y tm a n z d h n t i ci d l sw r r s n e c o d n s se da r m,a l a op h l h u o o swel s t e s f r o h r .B t ad r n ot r e e r aie n t e d sg t o fmo u aiain sr c u e h I o t lag — h o wa e f w c a t t l s oh h r wa e a d s f wa e w r e l d i h e in meh d o d lrz t t t r ,T e P D c nr lo z o u o r h wa s d frt e a tmai e dn o to s ae . T e s se i tg ae a ey o a iain sg a nef c s s c se e to i i m s u e uo t h a i g c n r l t tg t o h c r y h y tm ne r ts a v r t fn vg t i li tra e u h a l cr nc i o n c mp s ,Gy o c mp s n S o as r — o a sa d GP .T e s se h sa v rey o o t l d s n l d n h n a c nr l e v o t la d a tma i c n h y t m a ai t fc nr o mo e ,i cu i gt e ma u l o t ,s ro c n r n uo t o — o o c
F ENG o ,XI Ha ONG a .h n Yu n s e g
( . ol eo fr t nE g er g hj n nvr t o eh ooy Haghu3 0 3 , hn ; 1 C l g f nomao n i ei ,Z ei gU i sy f cn l , n zo 0 2 C ia e I i n n a e i T g 1 2 C l g f c a i l Eetcl n ier g J x gU i ri , i ig3 4 0 , hn ) . o eeo h nc & lc ia E gne n , i i nv sy J x 10 1 C ia l Me a r i an e t an
的 数 字 式 自动 舵 设 计 术
Hale Waihona Puke 封 浩 , 熊远 生2 ( . 江 工业大 学 信 息 工程学 院 , 江 杭 州 3 0 3 ;. 1浙 浙 10 2 2 嘉兴 学 院 机 电工程 学 院 , 浙江 嘉 兴 3 4 0 ) 10 1
摘要 : 针对我国的 自动操舵 仪长期 以来都是采用模拟技术设计 的问题 , 介绍 了一种 以 A M为核心 的数字式 自动舵 的模块 化设计方 R 法及 相应 实验结果 。首先介绍了船舶运动控制 的野本模 型 , 分析 了系统 的控制原理 , 然后根据 系统结构框 图设计 了各功 能模 块和 程序 流程 图。系统的软硬件均采用模块化设计 , 自动航 向控制策略采用 PD控制。系统具 有 电子罗盘 、 I 电罗经 、 P G S等多种 导航信 号接 口, 具有手动、 随动 、 自动等多种控制模式 , 预留了多种通讯接 口, 可方便地 与其 它设备连接 。实验结果表明 , 该设计方案可行。
第2 7卷 第 9期
21 0 0年 9月
机
电
工
程
Vo _ 7 No 9 l2 . S p. 2 0 e 01
J u n lo c a i a & E e t c lE gn e i g o r a fMe h n c l lcr a n i e r i n
基于 A