自动舵的发展及其特性
自动舵
号,且其极性反映交流信号的相位,大小反映交流
信号的幅值。能完成此功能的整流电路称为相敏整
流电路。
1、环形相敏整流电路
5
+ Eref 6 + Eref R11 7 Ein Rf Uout D6 D5 R12 D3 D4
相敏整流电路分析
条件:参考(调制)电压远大于输入电压 5 正半周
Eref +5 Eref 6+
2 RRf Uout if * Rf Ein r( Rf 2 R) 2 R( Rf R)
波形
Eref
Ein
Uout
2、整流桥式相敏整流电路
U * +
* E0
U1
* E0
-
3、晶体管调制解调器
4、运算放大器相敏整流电路
二、灵敏度调整电路
偏航信号
三、比例、微分、积分电路
偏航信号输入
• 舵机
舵机 [Steering Gear]
一、泵控型液压舵机
防浪阀(双联溢流阀): 太软:无法转舵 防冲击,沟通高低压油路 储能弹簧 太硬:不起作用
ACB:浮动杆追随机构[Float Hunting Gear]
三点浮杆追随机构原理
作用:加快转舵速度 操纵杆 A A1 A2
变量控制杆
C
C1
反馈杆 B2 B1 B
即使这种单侧偏航角度超过灵敏度,但不对称偏航所引 起的偏舵也是不对称的.因此时间长了,船舶也会出现 单侧偏航.实际航海中,通常人为压一个合适的舵角航行, 以纠正单侧偏航。 实现积分控制的方案: 1、电动机积分环节:
UC
UC
U
UI
2、热积分环节:
偏航加热器
UI
自动舵
6、设舵机失电报警和舵机电动机过载报警,但不设 过载保护。
7、在船舶高速满载情况下,舵应能自一舷35°转至 另一舷35°。且所需时间不超过28秒。辅助舵机小 于60秒。 9、在驾驶台设有舵角指示器,其与操舵指令和实际 舵角的误差<1°。
10、自动操舵仪应具有自动、随动和应急三种操舵 方式,且能方便转换和相互联锁。 11、舵杆直径>230mm的舵机,45s内提供替代动力; 1万Gt以上工作 30min, 其他工作10min。
安全阀: 伺服 溢流节流阀: 调速
活塞最大输出力
§4-4 自动操舵的控制规律
一、按比例控制的自动操舵
k p
式中 *
Kp随船型而不同,对万吨船来说,一般为2~3, 即偏航1°时,偏舵角为2~3°。比例系数过大, 将使船舶偏航振幅加大。因此比例操舵虽然简 单、可靠,但航向稳定精度较差。当受一舷持 续偏航力矩作用时,不能保证船舶的定向航行。
* kU U
+
R
R
U K
- +
U
UC
U K U U U C (U U C ) U
或
M
M
U U UC
UC
四、自动操舵仪中的常用调节环节 1、比例舵角调节 2、反舵角调节(微分舵,制动舵,纠偏舵) 3、灵敏度调节。天气调节。调节规律为:风平浪静, 灵敏度高;大风大浪,灵敏度低。
舵角反馈信号
§4-6 典型线路分析-安修斯自动舵
一、安修斯自动舵的特点及性能 1、属比例、微分、积分型航向控制系统 2、有自动和随动两种操舵方式。无应急操舵。 3、自动和随动操舵系统各自独立。除液压舵机的 控制电磁阀共用外,其信号传递、综合、变换均采 用两个通道,由选择开关进行选择和联锁。提高了 可靠性。
第5章 船舶操纵设备2
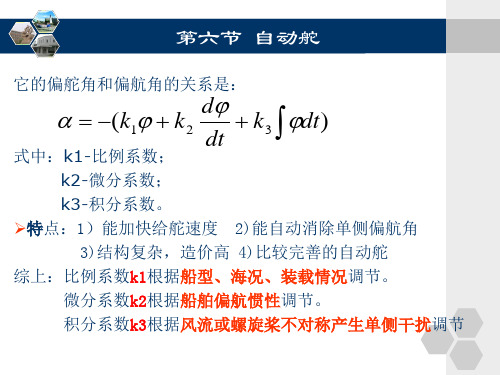
它的偏舵角和偏航角的关系是:
式中:k1-比例系数; k2-微分系数; k3-积分系数。 特点:1)能加快给舵速度 2)能自动消除单侧偏航角 3)结构复杂,造价高 4)比较完善的自动舵 综上:比例系数k1根据船型、海况、装载情况调节。 微分系数k2根据船舶偏航惯性调节。 积分系数k3根据风流或螺旋桨不对称产生单侧干扰调节
第八节 操舵要领及注意事项
1.按舵角操舵 舵工在听到值班驾驶员下达舵角舵令后,应 立即复诵并迅速、准确地把舵轮转到所命令的舵 角上,及时报告。在值班驾驶员下达新的舵令前, 舵工不得任意更动舵的位置。 船舶在进出港、靠离泊及海上采取避让措施时通 常采用按舵角操舵的方法。
第八节 操舵要领及注意事项
第六节 自动舵
四、自动舵的使用操作程序 各种类型的自动舵都和罗经、舵机组合起来, 并且都具有自动、随动和手柄(应急)三种操舵方 式。下面以图5-34所示国产红旗-4型自动操舵仪为 例,说明自动舵的使用操作程序。
第六节 自动舵
图 5-34 红旗-4型操舵仪
1-选择开关(selector switch); 2-分罗经调节孔(compass louver); 3-灵敏度(sensitivity); 4-压舵(meeting rudder); 5-微分调节(differential coefficient controlling); 6-分罗经(compass repeater); 7-舵角指示器(helm indicator); 8-灯光(lighting); 9-航向改变(course changing); 10-比例调节(proportional controlling); 11-机组开关(unit switch); 12-电源开关(power switch); 13-应急舵控钮(jury rudder controlling)
船舶自动舵控制技术的发展.doc
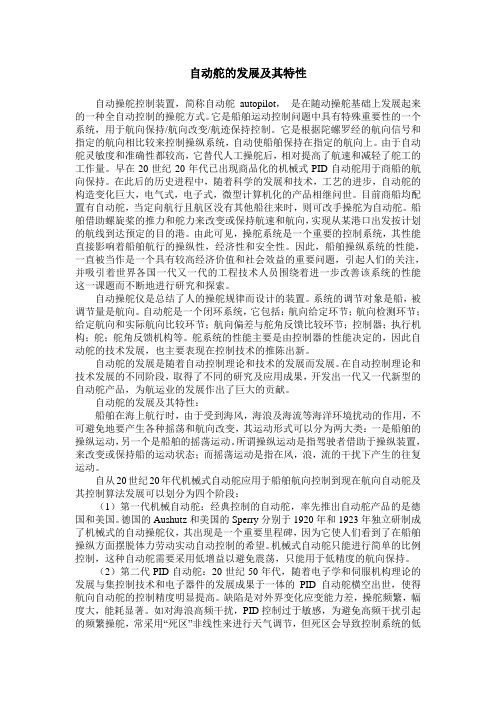
船舶自动舵控制技术的发展摘要:介绍了船舶自动舵的控制方法,结合当前航海科学技术的发展,提出了船舶自动舵系统的功能集约化、远程络化、装备内河化、无人驾驶化的发展趋势及其应用需要注意的问题。
关键词:自动舵;航向保持控制;自适应控制;智能控制船舶自动操舵仪(Autopilot),俗称自动舵,是根据指令信号自动操纵舵机,实现船舶在给定航向或航迹上航行的助航系统。
随着计算机、通信及控制技术的发展,船舶自动舵正向智能化和综合型发展。
性能优良的自动操舵仪可以减轻舵手的劳动强度,高精度的保持船舶航向、航迹,减少偏航次数及偏航值,提高船舶的安全性、操纵性和经济效益,因此一直受到国内外很多研究人员的关注。
1 船舶自动舵的控制方法自动舵的发展大体分为四个阶段:机械式自动舵、PID自动舵、自适应自动舵和智能自动舵。
1.1 机械式自动舵船舶自动舵的历史起源于陀螺罗经的发展。
1911年,El-mer Sperry将陀螺罗经应用于船舶自动转向,通过反馈控制和自动进行舵角修正,实现模拟人工操作。
此种自动舵的精度比较低,被称为第一代自动舵。
1.2 PID自动舵20世纪50年代,出现了集控制技术和电子器件发展成果于一体的PID自动舵。
经典的PID控制器结构方程为:δ=K1φ+K2φ+K3?φdt式中δ、φ分别为舵角信号和航向偏差信号;K为比例常数;K3?φdt为抵消风力矩的航向偏差积分项。
由上述经典方程可以看出,PID自动舵的控制参数较少、结构简单,易于推广应用。
然而,当船舶处于恶劣海况等复杂航行条件下时,人工调节参数无法满足外界条件的随时变化,降低了PID自动舵的适应性。
1.3 自适应自动舵随着自适应控制应用于船舶自动舵设计,大大提高了航向控制的精度,提高了恶劣海况条件下自动舵的适应性。
陆祥润等人采用了对偏航速率进行加权的最小方差自校正控制方案,进行了自适应舵的研究,该自动舵比PID自动舵具有更好的控制效果。
船舶自动化发展现状
船舶自动化发展现状随着科技的不断进步,船舶自动化技术也在不断发展,逐渐成为航运行业的一个重要趋势。
本文将从船舶自动化的定义、发展历程、应用领域、优势和挑战等方面进行详细阐述。
一、船舶自动化的定义1.1 船舶自动化是指利用先进的控制系统和无人驾驶技术,实现船舶的自主导航、自动操纵和自动监控。
1.2 船舶自动化技术主要包括自动舵、自动导航、自动泊位、自动货舱管理等功能。
1.3 船舶自动化技术以提高船舶安全性、节约人力成本、提高运输效率为主要目的。
二、船舶自动化的发展历程2.1 20世纪80年代,船舶自动化技术开始萌芽,主要应用于船舶的导航和操纵。
2.2 21世纪初,随着无人驾驶技术的发展,船舶自动化技术逐渐成熟,应用范围不断扩大。
2.3 目前,船舶自动化技术已经进入智能化阶段,实现了船舶的全自动化运行。
三、船舶自动化的应用领域3.1 船舶自动化技术主要应用于远洋航行、港口操作、海上救援等领域。
3.2 在远洋航行中,船舶自动化技术可以大大提高船舶的航行安全性和航行效率。
3.3 在港口操作中,船舶自动化技术可以实现船舶的自动停靠、自动卸货等功能,提高了港口作业效率。
四、船舶自动化的优势4.1 船舶自动化技术可以减少人为操作失误,提高船舶的安全性。
4.2 船舶自动化技术可以节约人力成本,提高船舶的运输效率。
4.3 船舶自动化技术可以提高船舶的环保性能,减少对海洋环境的污染。
五、船舶自动化的挑战5.1 船舶自动化技术的成本较高,需要大量的投入和研发。
5.2 船舶自动化技术的安全性和可靠性仍然存在一定的挑战,需要不断改进和完善。
5.3 船舶自动化技术的标准化和规范化工作尚需加强,以确保船舶自动化技术的稳定性和可持续发展。
总结起来,船舶自动化技术是航运行业的未来发展方向,虽然面临一些挑战,但随着技术的不断进步和完善,相信船舶自动化技术将会在未来取得更大的突破和发展。
简述船舶操纵自动舵原理
简述船舶操纵自动舵原理-CAL-FENGHAI.-(YICAI)-Company One1简述船舶操纵自动舵原理摘要:船舶操纵的自动舵是船舶系统中的一个不可缺少的重要设备,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,随着现代科学技术的不断进步,各种先进仪器的使用,使得船舶操纵开始向智能化方向发展,本文就船舶操纵自动舵的构成和工作原理方面进行了综述。
关键字:船舶自动舵现代船舶自动化船舶操纵的自动舵是船舶系统中的一个不可缺少的重要设备,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备。
它的性能直接关系到船舶的航行安全和经济效益。
代替人力操舵的自动舵的发展在相当程度上减少了人力,节省了燃料,降低了机械磨损,直接影响到船舶航行的操纵性、经济性和安全性。
舵机装置由操舵装置、舵机、传动机构和舵叶四部分组成。
(1)操舵装置:操舵装置的指令系统,由驾驶室的发送装置和舵机房的接受装置组成。
(2)舵机:转舵的动力。
(3)传动机构:能将多机产生的转舵力矩传递给舵杆。
(4)舵叶:环绕舵柱偏转,承受水流的作用力,以产生转舵力矩。
在自动操舵仪中,按控制系统分类可分为三种操舵方式:(1)直接控制系统或称单舵系统、应急操舵。
(2)随动控制系统。
(3)自动操舵控制系统,又称自动航向稳定系统。
自动操舵适用于船舶在海面上长时间航行.随动操舵供船舶经常改变航向时使用,如在内河、狭航道区和进出港口。
当自动航向/航迹、随动操纵出现故障时,可用应急的简单操舵,直接由人工控制电磁换向阀.使舵正、反或停转。
原理:利用电罗经检测船舶实际航向α,然后与给定航向K°进行比较,其差值作为操舵装置的输入信号,使操舵装置动作,改变偏舵角β。
在舵角的作用下,船舶逐渐回到正航向上。
船舶回到正航向后,舵叶不再偏转。
自动舵的控制原理:(1)比例舵(P舵)比例舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例关系,即:β=-K1φ(2-1)β:偏舵角,K1:比例系数,φ:偏航角,-:偏舵角方向是消除偏航。
自动舵的发展及其特性
自动舵的发展及其特性自动操舵控制装置,简称自动舵autopilot,是在随动操舵基础上发展起来的一种全自动控制的操舵方式。
它是船舶运动控制问题中具有特殊重要性的一个系统,用于航向保持/航向改变/航迹保持控制。
它是根据陀螺罗经的航向信号和指定的航向相比较来控制操纵系统,自动使船舶保持在指定的航向上。
由于自动舵灵敏度和准确性都较高,它替代人工操舵后,相对提高了航速和减轻了舵工的工作量。
早在20世纪20年代已出现商品化的机械式PID自动舵用于商船的航向保持。
在此后的历史进程中,随着科学的发展和技术,工艺的进步,自动舵的构造变化巨大,电气式,电子式,微型计算机化的产品相继问世。
目前商船均配置有自动舵,当定向航行且航区没有其他船往来时,则可改手操舵为自动舵。
船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港口出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要的控制系统,其性能直接影响着船舶航行的操纵性,经济性和安全性。
因此,船舶操纵系统的性能,一直被当作是一个具有较高经济价值和社会效益的重要问题,引起人们的关注,并吸引着世界各国一代又一代的工程技术人员围绕着进一步改善该系统的性能这一课题而不断地进行研究和探索。
自动操舵仪是总结了人的操舵规律而设计的装置。
系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向和实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;舵角反馈机构等。
舵系统的性能主要是由控制器的性能决定的,因此自动舵的技术发展,也主要表现在控制技术的推陈出新。
自动舵的发展是随着自动控制理论和技术的发展而发展。
在自动控制理论和技术发展的不同阶段,取得了不同的研究及应用成果,开发出一代又一代新型的自动舵产品,为航运业的发展作出了巨大的贡献。
自动舵的发展及其特性:船舶在海上航行时,由于受到海风,海浪及海流等海洋环境扰动的作用,不可避免地要产生各种摇荡和航向改变,其运动形式可以分为两大类:一是船舶的操纵运动,另一个是船舶的摇荡运动。
船舶自动舵的发展

船舶自动舵的发展0942813220 刘磊摘要:综述了航海自动舵的技术史和今后发展趋向以及就船舶操纵自动舵的工作原理和方法方面进行了综述。
关键词:自动舵技术发展过程自动舵发展趋向自动舵的原理自动舵的工作方法船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动操舵仪是总结了人的操舵规律而设计的装置,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备。
系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向与实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;调节对象—船;舵角反馈机构等。
自1922年自动舵问世到今天, 代替人力操舵的自动舵的发展确实取得了长足的进展, 在相当程度上减少了人力, 节约了燃料, 降低了机械磨损, 但是距离真正意义上的操舵自动化还有相。
当大的距离。
本文在展望人工智能控制舵之前先对目前的自动舵进行简要的回顾,再对船舶操纵自动舵的构成和工作原理方面进行了综述。
一.自动舵的技术发展历史1.传统的自动舵1922年Minorsky和Sperry分别从数学角度和陀螺罗经在船舶上的运用角度各自发表了论文, 这两篇论文可以看作是对船舶自动舵作出了最早的贡献。
1923年,Minorsky设计的自动舵就装在新墨西哥的战舰上投人了试验。
早期自动舵以机械结构为基础,仅能对航向进行初步控制, 今天我们将这种控制方法称为“比例(P)控制”。
这是由于自动舵舵角的偏转大小是和船舶偏航角成比例的。
下面的公式可表示比例控制的规律:在实际工作中, 用陀螺罗经测出即时航向信号并与设定的航向进行比较, 然后将二者的差值输人到控制器中去, 由控制器输出并驱动舵轮伺服机构。
2-2-5自动舵(精)
五、自动舵
3)反舵角调节(rate adjust):又称微分 旋钮,在船舶偏航用舵克服使其向原航向回转 时,还必须再操一个反舵角来克服船舶回转时的 惯性。因此,使用反舵角调节可给出反舵角的 大小,以阻止船舶向另一侧的偏摆。大船、 重载、旋回惯性大时微分要调大;反之,要 调小。海况恶劣,微分作用要调小或调至0。 4)压舵调节:是用一固定信号使舵叶偏转 一个固定的角度,以抵消单侧偏航的作用。
五、自动舵
3. 使用自动操舵仪的注意事项 1)在大风浪航行时,为保护自动舵应改用 人工操舵; 2)在运输繁忙区域,如避让、改向、过转向 点,狭水道、渔区、复杂航道、靠离泊、能见度 不良及所有航行危险的情况应尽可能改为人工 操舵; 3)在上述情况下,应可能快地为驾驶员提供 一位合格的舵工,该舵工应随时接过操舵;
五、自动舵
4)自动舵与人工舵转换时应有负责的 值驾操作或在其监督下进行; 5)长期使用自动舵后及进入谨慎驾驶前 均应试验人工操舵,通常每一航行班次(每4 小时)至少应检查一次随动操舵装置是否正常; 6)随动操舵时各个自动舵调节旋纽不起 作用,但转入自动舵时应先将压舵旋纽和自动 改向旋纽调至零位。
五、自动舵
一般自动舵是目前在海船上最常见的自动 舵。它与人工操舵比较,其优点是:自动纠正偏 航角,减轻人员的劳动强度,航向精度高,提高 航速,减少燃料消耗,缩短航程。 一)自动舵的种类 1. 比例舵: 按船舶偏航角ф来操舵的自动舵。这种自动 舵采用比例控制系统,偏舵角α和偏航角ф成正 比关系,即:α=-k1ф式中:k1——比例系数— —负号表示偏舵的方向与偏航方向相反。比例系 数k1可以根据船舶类型、海况、装载情况加以选 择和调整;
五、自动舵
但它不能克服偏航角速度的影响,航向稳定 的过程较慢,航迹易成“S”形曲线,精度较差, 故新建船舶已不再采用。 2. 比例-微分舵 按船舶偏航角ф和偏航角速度dф/dt来操舵的 自动舵这种自动舵采用比例—微分控制系统,其 偏舵角α和偏航角ф之间的关系为:α=-(k1ф+ k2dф/dt)式中:k1——比例系数;k2——微分 系数。
W航向航技控制技术剖析
第二章自动舵船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动舵(Autopilot)是维持船舶在预先设定的航向上航行的自动操舵控制装置。
它根据船员的操舵规律设计,调节的对象是船,被调节的量是航向或航迹。
自动舵能减轻劳动强度;及时纠正偏航;长时间较准确地保持在指定航向上,从而缩短航程,节约燃料,提高经济效益。
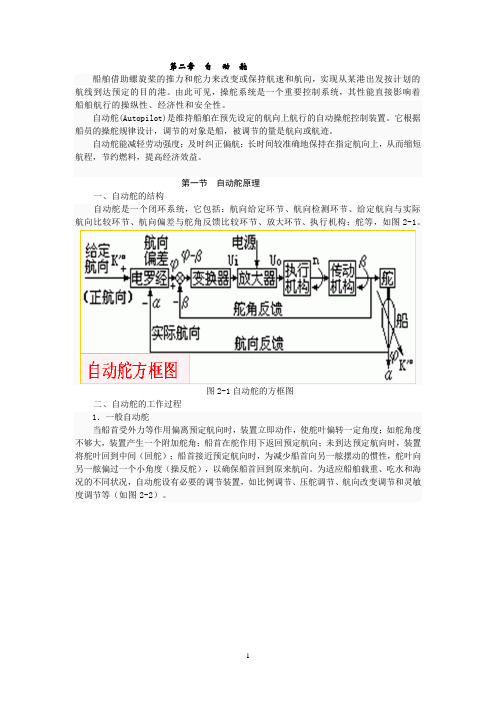
第一节自动舵原理一、自动舵的结构自动舵是一个闭环系统,它包括:航向给定环节、航向检测环节、给定航向与实际航向比较环节、航向偏差与舵角反馈比较环节、放大环节、执行机构;舵等,如图2-1。
图2-1自动舵的方框图二、自动舵的工作过程1.一般自动舵当船首受外力等作用偏离预定航向时,装置立即动作,使舵叶偏转一定角度;如舵角度不够大,装置产生一个附加舵角;船首在舵作用下返回预定航向;未到达预定航向时,装置将舵叶回到中间(回舵);船首接近预定航向时,为减少船首向另一舷摆动的惯性,舵叶向另一舷偏过一个小角度(操反舵),以确保船首回到原来航向。
为适应船舶载重、吃水和海况的不同状况,自动舵设有必要的调节装置,如比例调节、压舵调节、航向改变调节和灵敏度调节等(如图2-2)。
图2-2 一般自动舵的作用过程航向保持模式有两种,分别适用于两种典型的海况:开放水域模式(OPEN SEA),适用于只需小幅度操纵导航的情况,如在大洋上航行,为的是节省燃料的费用。
限制模式(CONFINED),适用于大幅度的操纵情况,如在狭水道中航行,能提高航向维持的精确性。
2.自适应自动舵1)普通自动舵的缺陷普通自动舵各调节旋钮是人工根据经验用手动方式进行调节和修正的,由此带来的后果是:精度差→操舵次数多→阻力增大→主机负荷加大、转速下降→为阻止转速下降→调速器工作→油耗增加,因此从节能角度来看,普通自动舵在操作中仍有不足之处。
自动舵工作原理
自动舵工作原理
自动舵是一种用于船舶、飞机、车辆等交通工具的设备,用于帮助控制航向或方向的稳定性。
其工作原理主要包括以下几个方面:
1. 传感器检测:自动舵系统通过使用各种传感器来检测船舶、飞机或车辆的当前状态和环境条件。
常见的传感器包括陀螺仪、加速度计、磁罗盘、气压计等,它们可以测量船体的倾斜角度、航向角度、速度和环境因素等。
2. 信息处理:传感器将收集到的数据传输给自动舵系统的中央处理器。
中央处理器根据输入的数据进行分析和计算,确定船舶、飞机或车辆当前的姿态和状态,然后生成相应的控制指令。
3. 控制执行:自动舵系统通过电动执行机构或液压控制系统,将计算得到的控制指令转化为实际的控制动作。
例如,对于船舶来说,自动舵可以通过舵机控制舵盘的转动角度,从而改变船舶的航向角度;对于飞机来说,自动舵可以通过控制副翼和方向舵的舵面来调整飞机的姿态和飞行方向。
4. 反馈控制:自动舵系统通常还具有反馈控制机制,以便及时对目标航向或方向进行修正。
通过不断地监测和调整船舶、飞机或车辆的状态和环境条件,自动舵系统可以保持目标航向或方向的稳定性。
总之,自动舵利用传感器检测船舶、飞机、车辆等交通工具的状态和环境信息,通过中央处理器进行数据处理和计算,然后
通过执行机构或控制系统实施相应的控制动作,以实现船舶、飞机、车辆的自动稳定航向或方向。
船舶自动舵研究综述
船舶自动舵研究综述摘要本文主要对船舶自动舵的研究现状及未来发展趋势进行了深入探讨。
船舶自动舵作为一种重要的船舶控制系统,对于提高船舶航行效率、降低驾驶员工作负荷、增强船舶安全性等方面具有重要意义。
本文在总结历史发展、分析现有研究成果的基础上,指出了当前研究的不足之处和未来可能的研究方向。
引言船舶自动舵是一种利用计算机、传感器、控制系统等技术的自动化设备,用于实现船舶的自动导航和航向控制。
它的出现大大提高了船舶的航行效率和安全性,减少了人工操作失误,降低了驾驶员的工作负荷。
本文旨在综述船舶自动舵的研究现状和发展趋势,以期为相关领域的研究提供参考。
文献综述船舶自动舵的研究可以追溯到20世纪初,但直到近年来,随着计算机、传感器、控制理论等技术的不断发展,船舶自动舵的研究才取得了显著的成果。
目前,船舶自动舵的研究主要集中在航向控制算法、传感器数据处理、系统鲁棒性等方面。
在航向控制算法方面,研究者们提出了多种不同的算法,如PID控制、卡尔曼滤波、神经网络等。
这些算法在不同的场景和条件下都取得了一定的成果,但同时也存在一定的局限性和不足。
例如,PID控制算法简单易行,但参数调整难度较大;卡尔曼滤波算法适用于噪声干扰较小的场合,但容易出现滤波误差积累等问题;神经网络算法具有强大的自适应学习能力,但训练时间较长且易陷入局部最小值。
在传感器数据处理方面,研究者们主要于提高传感器的测量精度和可靠性。
例如,采用多种传感器融合的方法来提高航向角的测量精度;利用滤波算法对传感器数据进行去噪处理,以提高数据的可靠性。
在系统鲁棒性方面,研究者们致力于提高船舶自动舵对外部干扰和内部故障的鲁棒性。
例如,通过引入干扰抑制器和故障诊断模块,提高系统的稳定性和可靠性。
结论通过对船舶自动舵的深入研究,我们可以发现当前研究的不足之处主要包括以下几个方面:首先,航向控制算法仍需进一步优化和完善,以提高系统的性能和适应性;其次,传感器数据处理方面仍需加强融合技术和滤波算法的研究,以提高数据的精度和可靠性;最后,在系统鲁棒性方面,还需要进一步研究和开发更具鲁棒性的控制系统。
舵设备与操舵 自动舵3
第七节 舵设备的检查、保养与试验
2.定期检查
每3个月应对舵设备进行一次全面的检查和保养:
1)查看舵杆、舵叶各部分磨损及损坏情况,作好记录。舵杆(销) 一般在下舵承处(或舵销处)的轴颈应大于非工作部分的轴颈, 否则应进行修理或换新。工作轴颈表面允许存在少量分散的锈 蚀斑点,但深度不超过舵杆(销)直径的1%,舵杆非工作轴颈允 许减少量为原设计直径的7%。舵钮与舵钮,或舵叶与舵托平 面极限间隙一般为安装间隙的50%。 2)检查电操舵装臵的绝缘和触点情况,用不带毛头的细布揩拭清 洁。自动部分检查其灵敏度;液压舵机要查管路有否泄露及液 油质量。 3)检查转舵装臵电动机的运转及损耗情况,加以清洁,并作好记 录;液压式舵机要检查泄漏情况及油的质量,以及时修复并充 液。
第五节 自动舵(autopilot)
1.航迹舵基本原理 – 自动航行控制系统实际上是通过一台微处理器,将人 工输入的计划航线(各转向点的经纬度)与通过定位 传感器得到的实时船位等数据进行计算、比较分析和 处理,并得到一个可供自动舵执行的航向(也称指标 航向CS)。 – 在执行过程中,由于船舶受风流压的影响,船位还会 偏离计划航线,此时,航迹自动舵能给出一个新的指 标航向,因此,指标航向是一连串变化的,并均匀地 改变指标航向,从而,达到自动保持在航迹带内所需 航向和在转向点自动转向的目的。
第五节 自动舵(autopilot)
三、航迹舵(Navpilot)
又称自动驾驶仪,是以自动舵为基础,以计算机为核 心,并连接综合导航仪或船位接收机的一种自动航行 控制系统。 它通过人工向系统输入航路数据、位臵偏移量以及硬 件部分连接计程仪、陀螺罗经、定位仪,将这些信号 和数据通过微机软件进行计算、分析与处理,能使船 舶自动沿着计划航线航行,并能在预定的转向点自动 转向,从而实现船舶自动航行控制。 航迹自动舵输出的舵角主要与船舶偏离计划航向的偏 航角和偏航角速度有关,而航迹自动舵除了与此有关 外,还与船舶偏离计划航线的航迹误差有关。
自动舵的名词解释
自动舵的名词解释自动舵是一种用于船舶、飞机等交通工具的导航设备,它通过自动控制舵机或舵柄,实现对船舶或飞机方向的自动调整和保持。
自动舵的主要功能是减轻驾驶员的操作负担,提高交通工具的稳定性和安全性。
自动舵可以根据预设的航线指令或导航数据,自动控制船舶或飞机的转向行为。
它通常采用陀螺仪、罗盘、GPS(全球定位系统)等导航工具来获取位置和方向信息,并根据这些信息计算出所需的航向角度,然后通过电子控制系统控制舵机或舵柄进行调整。
自动舵在船舶和飞机的应用中具有重要意义。
在海上航行中,自动舵能够帮助船舶保持航向稳定,减少驾驶员的疲劳程度,提高工作效率。
在航空领域,自动舵对于飞机的稳定飞行和导航至关重要,能够实现自动起飞、自动巡航和自动降落等功能。
自动舵的工作原理基于舵机或舵柄的控制。
舵机是一种能够将电信号转化为机械运动的装置,通过舵机的转动,可以控制船舶或飞机的舵面位置,从而实现航向的调整。
控制系统会根据导航数据和预设指令计算出期望的舵角,然后将信号发送给舵机,使船舶或飞机按照期望的舵角进行转向。
除了基本的航向控制功能,现代的自动舵系统还常常配备有一些辅助功能。
例如,它可以与雷达、遥感设备等其他导航设备进行联动,提供更准确的导航和避碰功能。
此外,自动舵还能够根据机载设备的输入信息,实现对船舶或飞机高度、速度等参数的调节。
总之,自动舵是一种用于交通工具导航的重要装置,通过自动控制舵机或舵柄,实现对船舶或飞机方向的自动调整和保持。
它能够减轻驾驶员的操作负担,提高交通工具的稳定性和安全性,对于船舶和飞机的安全航行具有重要作用。
自动操舵仪

介绍
01 设备简介
03 系统组成
目录
02 工作原理 04 设备分类
基本信息
又称自动操舵装置,是船舶上用于自动控制舵机,以保持船舶按规定航向航行的设备。船舶水面航行主要是 依靠舵来控制航向,自动操舵仪指代替舵手操舵,保证船舶自动跟踪指令航向,达到自动保持与改变航向的目的。
结合陀螺罗经或磁罗经使船能自动保持预定航向的装置。在船正航时,通连罗经刻度盘的接触器处于绝缘位 置,对舵不起作用。船偏航时,接触器接通电流开动操舵电动机以绑正偏航直至船回复并按预定航向前进。因其 对偏航反应灵敏,可使船沿较直航线前进。可全自动操舵或与人工操舵共同运用,也可将其关闭全用人工操舵。
自动操舵仪是根据指令信号自动完成操纵舵机,以使船舶能够保持在预定航线上稳定航行的设备,性能优良 的自动操舵可保持高精度的船舶航向、航迹,减少偏航,由此相应缩短航程,节省燃料,提高航行的经济效益。 用于海洋船舶的操舵仪操舵范围应为±35°,用于内河船舶的操舵范围应为±40°。
自动操舵有两种工况:一种是自动稳定航向;另一种是改变航向。普通自动舵仅有航向保持功能,航迹舵具 有控制船舶精确的航行轨迹。自动操舵仪与ECDIS相结合,可实现航迹控制,在航路点(WP)处。自动转向;在偏 离航迹时,自动控制船舶回到设定的航迹。
谢谢观看
自动操舵仪通常都应具有自动、随动和非随动三种工作状态,有的还有越控功能。其组成主要包括主操舵台、 简易操纵台、反馈机构、伺服机构、转换开关等,并应具有就地应急操舵功能。
(1)主操纵台是自动操舵仪的主要部件,安装在驾驶室中央,一般具有自动、随动、非随动三种工作状态。 (2)简易操纵台安装在舵机舱,进行应急操舵。 (3)反馈机构安装在舵机舱。 (4)伺服机构安装在舵机舱。 (5)转换开关箱安装在舵机舱。 (6)电源转换器安装在舵机舱。 自动操舵仪应与舵机系统和罗经系统紧密配合(当电罗经有故障时,也可通过磁罗经的传感器获得航向信号)。
_船舶自动舵控制技术发展研究_船舶自动舵控制技术发展研究

摘要 :介绍 与比较了船舶操纵的各种 自动舵 控制方 法 , 船舶自 动舵可 分为四 个发展阶 段 , 即机 械舵 、 PI D 舵 、 自 适应舵和智能舵 , 其中智能舵为目前最先进的自动舵 , 它又分为专家系统 、 模糊舵和神经网络舵 。
关键词 :船舶操纵 ;自动舵 ;PID 控制 ;自适应控制 ;智能控制 中图分类号 :T P273;U66 文献标识码 :A
当横向风引起下风或上风力矩干扰时 , 为保持航 向不变 , 应再加上航向偏差的积分项 , 这就是著名的 比例 -微分 -积分 (P ID)控 制 , 其中 的比 例 、 微 分 、 积分项分别体现了对误差的线性缩放 、 记忆 、 改 变趋势作用 。根据 M ort 的论文 , 加入积分项可能降 低舵的响应速度 。为抵消船舶反应迟钝的影响 , 又加 入一 个 加速 项。 整 定好 这 些比 例、 微 分、 积 分 (PID)等控制参数 , 就能得到较好的操纵性能 。
(2)M erlo 等的随机自适应法包含一个由海浪自 回归滑动平均模型中的海浪功率谱决定的参数 , 即假 定代价函数是航向偏差和操舵角的均方加权函数 , 其 目标是使代价函数值最小 。 此法与 Mo tora 提出的方 法类似 。
(3)Akaike 提出 多变 量 随机 系统 的辨 识方 法 , 此法是在 Oht su 等提出的方法基础上发展起来的 , 它 的模型取决于最小 Akaike 信息标准 , 代价函数依赖 于被控变量的偏差 、 控制信号大小 (舵角)和控制信 号变化率的补偿值 。
自动舵大致经历了 4 个发展阶段 :20 世纪 20 年 代 , 美国的 Sperry 和德国的 Anschuz 在陀螺罗经研制 工作取得实质性进展后分别研制出机械式自动舵[ 4] , 这为第一代自动舵 ;20 世纪 50 年代 , 随着电子学和 伺服机构理论的发展与应用 , 出现了集控制技术和电 子器件发展成果于一体的第二代自动舵 , 这就是著名 的 P ID 舵 ;到了 60 年代末 , 人们将自适应理论引入 船舶操纵 , 瑞典等国家纷纷将自适应舵从实验室装到 实船上 , 形成了第三代自动舵 ———自适应舵 ;从 80 年代起 , 人们开始寻找类似于人工操舵的方法 , 像熟 练的舵手运用操舵经验和智慧那样有效地控制船舶 ,
船舶舵机装置的自动控制系统介绍

1
2
3
4
5
7
6
8
9
(a)不平衡舵
1
2
3
4
10
7
9 (b)平衡舵
1
2
4
3
5
6
9
(c)半平衡舵
图13-4液压舵机传动机构
(二)、电动—液压舵机装置 铰链的撞杆两端置入左右高压油缸内,两油缸与油泵连接,当油缸 注入高压油而油缸排出低压油时,推动撞杆(类似于活塞)向低压 端移动,从而带动舵柄、舵柱和舵叶偏转。高压油泵的排量和流向 则由操舵系统控制。
三、对舵机拖动控制系统的技术要求
(一)、从主配电板到舵机舱应采用双线供电制,并尽可能远离 分开敷设(如左、右舷两路)。在正常情况下应急配电板供电时, 其中一路可以经应急配电板供电。驾驶室与舵机舱的操舵装置应使 用同一电源。
而横向分力F2会产生一个使船舶转向的转船力矩M。假设在船舶的
重心“0”处加上一对大小相等而方向相反的力,即f1=f2=F2,并与
F2平等。则F2与f1组成一个转船力矩M=F2×a,a为F2与f1之间的
距离。而f2则引起船舶的横向漂移。
转船力矩在一定的舵角上出现最大值,这个舵角称为最大舵
角。在船舶上通常予以限定的角度(例如350)作为舵机的最大转
纵过程却显得很麻烦,而且需要熟练的操舵经验,否则将使船舶沿
固定航向左右摆动的幅度太大。这种操舵方式仅适用于内河小型船 舶和作为海船的应急操舵方式。
浅谈自动舵

大连海事大学毕业论文二〇一五年六月自动舵技术的发展专业班级:航海技术11-4班*名:**指导教师:航海学院摘要此文论述了自动舵的发展在实现船舶自动化过程中的重要地位,综述了航海自动舵的发展史及今后发展的展望。
此文从应用技术的观点出发,介绍与比较了船舶操纵的各种自动舵控制方法和它们的优缺点,船舶自动舵可分为四个发展阶段,即传统的机械舵、PID舵、自适应舵和智能舵,其中智能舵为目前最先进的自动舵,它的控制系统又分为专家控制、模糊控制和神经网络控制。
介绍了国内外对船舶自动舵的航向保持控制、航迹保持控制及其他功能方面的研究成果,将船舶自动舵研究与IMO 的“e-Navigation”战略实施计划结合起来,说明了船舶未来的发展方向。
关键词:自动舵、机械自动舵、PID自动舵、自适应控制、智能控制;AbstractThis article illustrates the key status of autopilot development in the process of realizing ship automation, and summarizes the phylogeny of marine autopilot and prospect for the future. From the viewpoint of technology application, this article introduces and compares several autopilot control methods of ship maneuver and corresponding merits and demerits. Evolution of marine autopilot falls into three phases, namely the traditional mechanical rudder, PID rudder, adaptive steering rudder and intelligent rudder, among which intelligent rudder is the most advanced autopilot at present, whose control system can further be divided into expert control, fuzzy control and neural network control. In addition, this article introduces domestic and overseas research achievements in terms of marine autopilot course keeping control, track keeping control and other functions, and integrates marine autopilot research with ‘e-Navigation’ strategic implementation plan of IMO, which demonstrates the development orientation of ships in the future.Keywords: autopilot, mechanical autopilot, PID autopilot, adaptive control , intelligent control目录1. 绪论 (VI)1.1研究的意义 ..................................................................................................... V I1.2自动舵的基本原理 ......................................................................................... V I2.机械自动舵 .............................................................................................................. V II3.PID自动舵 ................................................................................................................ V II3.1PID自动舵的发展........................................................................................... V II3.2PID自动舵的不足........................................................................................... V II4.自适应技术与自适应舵 ......................................................................................... V III4.1自适应技术的发展和应用 ........................................................................... V III4.2早期自适应舵的优缺点 ............................................................................... V III4.3自矫正控制系统的发展 ............................................................................... V III4.4育鲲轮上的自适应舵的特点 ....................................................................... V III5.新型智能舵的发展及未来 ....................................................................................... I X5.1智能控制的特点 ............................................................................................. I X5.2智能控制还需解决的问题 ............................................................................. I X5.3智能控制的发展和应用 ................................................................................. I X5.4典型的智能控制方法 (X)5.4.1专家控制 (X)5.4.2模糊控制 (X)5.4.3神经网络控制 (X)6.自动舵研究的发展趋势 (X)自动舵技术的发展1.绪论1.1研究的意义船舶借助螺旋桨的推力和舵的舵力来改变和保持航速或航向,实现从出发港到目的港的航行计划。
自动舵

PR-7000-L 自动舵第一章综述1.1介绍本自动舵作为一款简便的操纵仪,具有4种操作模式:计算机辅助操纵(CPU)、手动操纵(HAND)、应急操纵(NFU)及遥控操纵(RC-1、RC-2)(可选择);并可只通过转换MODE SELECTOR SWITCH(模式选择开关)来进行选择。
另外,通过按下在MODE SELECTOR SWICH键左边的MODE SELECTOR PUCH BUTTON SWICH(模式选择按钮)操纵CPU选择三种不同的操作模式:自动舵(AUTO)、积分舵(RATE)、自动导航(NAV:选择)具有双重模式的自适应舵具有两套完整的系统,SYSTEM SELECTOR SWITCH(系统选择开关)有以下几档:NO.1-OFF-NO.2,当开关转至所需运行的系统位时,系统会自动进入运行状态,而当开关转到OFF档时,整个系统将停止工作。
自动舵是一套使船舶维持在预先设定的航向上航行的自动操舵控制装置,近来,对于自动舵的性能评估已从“能使船舶精确维持航向”变为“在各种情况下,最省油的操纵”。
然而,船舶的操纵取决于船舶的尺度及具体的技术指标,同时也随着船舶的航速,装载情况及海况的不同而不同。
因此,对于自动舵的评价没有明确的标准。
为了解决这些问题,本款自适应舵引入了性能测试功能以测定在自动舵协助的情况下,能节省的能量。
本款自适应舵有如下特性:控制操纵装置运用的是一套微处理器并且完全数字化;基本控制方式是自适应控制系统反馈模型根据船舶速度和装载状况的改变能迅速调整,能够在各种状态下,进行最佳的操纵。
三种航向维持模式,可根据实际,适用于各种海况:OPEN SEA (开放水域模式)适用于只需小幅度操纵导航的情况,如在大洋上航行,为的是节省燃料的费用。
CONFINED(限制模式)适用于大幅度的操纵情况,如在狭水道中航行,为的是提高航向维持的精确性。
比例舵(RATE)作为一种标准的操纵模式,可以通过旋转舵轮给出的指令指示,按设定的转向速率来控制船舶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动舵的发展及其特性
自动操舵控制装置,简称自动舵autopilot,是在随动操舵基础上发展起来的一种全自动控制的操舵方式。
它是船舶运动控制问题中具有特殊重要性的一个系统,用于航向保持/航向改变/航迹保持控制。
它是根据陀螺罗经的航向信号和指定的航向相比较来控制操纵系统,自动使船舶保持在指定的航向上。
由于自动舵灵敏度和准确性都较高,它替代人工操舵后,相对提高了航速和减轻了舵工的工作量。
早在20世纪20年代已出现商品化的机械式PID自动舵用于商船的航向保持。
在此后的历史进程中,随着科学的发展和技术,工艺的进步,自动舵的构造变化巨大,电气式,电子式,微型计算机化的产品相继问世。
目前商船均配置有自动舵,当定向航行且航区没有其他船往来时,则可改手操舵为自动舵。
船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港口出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要的控制系统,其性能直接影响着船舶航行的操纵性,经济性和安全性。
因此,船舶操纵系统的性能,一直被当作是一个具有较高经济价值和社会效益的重要问题,引起人们的关注,并吸引着世界各国一代又一代的工程技术人员围绕着进一步改善该系统的性能这一课题而不断地进行研究和探索。
自动操舵仪是总结了人的操舵规律而设计的装置。
系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向和实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;舵角反馈机构等。
舵系统的性能主要是由控制器的性能决定的,因此自动舵的技术发展,也主要表现在控制技术的推陈出新。
自动舵的发展是随着自动控制理论和技术的发展而发展。
在自动控制理论和技术发展的不同阶段,取得了不同的研究及应用成果,开发出一代又一代新型的自动舵产品,为航运业的发展作出了巨大的贡献。
自动舵的发展及其特性:
船舶在海上航行时,由于受到海风,海浪及海流等海洋环境扰动的作用,不可避免地要产生各种摇荡和航向改变,其运动形式可以分为两大类:一是船舶的操纵运动,另一个是船舶的摇荡运动。
所谓操纵运动是指驾驶者借助于操纵装置,来改变或保持船的运动状态;而摇荡运动是指在风,浪,流的干扰下产生的往复运动。
自从20世纪20年代机械式自动舵应用于船舶航向控制到现在航向自动舵及其控制算法发展可以划分为四个阶段:
(1)第一代机械自动舵:经典控制的自动舵,率先推出自动舵产品的是德国和美国。
德国的Aushutz和美国的Sperry分别于1920年和1923年独立研制成了机械式的自动操舵仪,其出现是一个重要里程碑,因为它使人们看到了在船舶操纵方面摆脱体力劳动实动自动控制的希望。
机械式自动舵只能进行简单的比例控制,这种自动舵需要采用低增益以避免震荡,只能用于低精度的航向保持。
(2)第二代PID自动舵:20世纪50年代,随着电子学和伺服机构理论的发展与集控制技术和电子器件的发展成果于一体的PID自动舵横空出世,使得航向自动舵的控制精度明显提高。
缺陷是对外界变化应变能力差,操舵频繁,幅度大,能耗显著。
如对海浪高频干扰,PID控制过于敏感,为避免高频干扰引起的频繁操舵,常采用“死区”非线性来进行天气调节,但死区会导致控制系统的低
频特性恶化,产生持续的周期性偏航,这将引起航行精度降低,能量消耗加大;此外,当船舶的动态特性速度,载重,水深,外型或外界条件风浪流等发生变化时,控制参数需连续地进行人工整定,不合适的控制参数的控制器将导致差的控制效果,如操舵幅度大,操舵频繁等,而人工整定参数很麻烦。
(3)第三代自适应舵:20世纪60年代未,随着计算机技术和自适应理论的发展,人们到注意到将自适应理论引入船舶操纵成为可能,瑞典等北欧国定的一大批科技人员纷纷将自适应舵应用到实船上,继而正式形成了第三代自动舵。
自适应舵在提高控制精度,减少能耗方面取得了一定的成绩,但物理实现成本高,参数调整难度大,尤其是船舶的非线性和不确定性使得控制效果难以保证,影响系统的稳定性。
70年代初期,JvAmernogen等人,就开始研究基于模型参考自适应控制的自动操舵仪。
70年代中期,KJAStorm等人研究了基于自校正控制的自适应操舵议。
自校正控制系统包括被控制对象和自校正控制器两部分。
当船舶在变海况,变速,变载航行时,舵角也在相应的改变。
由于船舶运动及加在其上扰动的数学模型参数是不断变化的,因此必须通过在线辩识来实时辨识变化着的数学模型参数。
自校正控制器的功能就是使数学模型的参数能在系统投入运行后动整定,且当模型参数发生变化时,控制器本身也能修正自己的参数。
使控制系统在指定的性能指标下(动舵次数最少,偏航幅最小)尽可能接近最优。
因此其制成的自动舵,控制规律采用最小方差自适应调节器算法。
具有适应能力良好,附加阻力小的优点。
(4)第四代智能舵:20世纪80年代以来,人们开始探索类似于人工操舵的智能方法,尝试着将其具有自适应,自学习,自优化,自整定能力的智能控制,其中又可分为神经网络控制,模糊逻辑控制,混合智能控制,应用于船舶航向控制技术,产生了第四代智能式自动舵。
第四代智能舵对于过程模型存在的不确定性,干扰以及量测噪声都具有良好的鲁棒性,使得自动舵的控制性能从自适应性,鲁棒性,稳定性等等各个方面均有了明显的改善和提高。
不足之处是控制器复杂,参数调整仍然相对较难。
船舶的自动化,从船舶在机舱设置集中控制室到出现无人机舱值班和驾驶台对主机遥控操作及监测,船舶机舱自动化已大势所趋。
计算机功能代替复杂的电子线路,发出操舵指令,送到执行中心,自动校正控制的相关参数,代替繁琐的人工指令,使船舶舵发展成为一个具有自适应功能的接受指令的自动舵。
近年来,国内的学者对自适应控制的研究也相当活跃,他们在相关的学术刊物上发表了许多研制成果。
自适应模糊控制,专家控制,基于神经网络的自适应控制也取得很大进步。
国内外的研究动态均表明今后的自适应技术将朝着智能化的方向发展。