相异步电动机正反转控制电路图原理及plc接线与编程
任务三 三相异步电动机正反转循环运行的PLC控制

(二)设备与器材
表1-22 设备与器材
序号
名称
符号
型号规格
数量 备注
1
常用电工工具
十字起、一字起、尖嘴钳、剥线钳 等
1
2
计算机(安装GX Works3编程 软件)
3
三菱FX5U可编程控制器
PLC
FX5U-32MR/ES
4
三相异步电动机正反转循环运 行控制面板
5
三相异步电动机
6
以太网通信电缆
M
WDJ26,PN=40W,UN=380V, IN=0.2A,nN=1430r/min,f=50Hz
2)学会用三菱FX5U PLC的顺控程序指令编辑三相异步电动机正反转循 环运行控制的程序。
3)会绘制三相异步电动机正反转循环运行控制的I/O接线图。 4)掌握FX5U PLC I/O接线方法。 5)熟练掌握使用三菱GX Works3编程软件编辑梯形图程序,并写入 PLC进行调试运行。
11
项目一 任务三 三相异步电动机正反转运行运行的PLC控制
MPS
栈存储器的第一层, 之前存储的数据依次
下移一层
读取堆栈第一层的 MRD 数据且保存,堆栈内
的数据不移动
读取堆栈存储器第
MPP
一层的数据,同时该 数据消失,栈内的数
据依次上移一层
梯形图表示
FBD/LD表示
ST表示
目标元件
ENO:=MPS(EN);
ENO:=MRD(EN);
无
ENO:=MPP(EN);
对于FX5U PLC默认情况下,16位计数器的个数为256个,对应编号为C0 ~C255;32位超长计数器个数为64个,对应编号为LC0~LC63。
PLC控制实验--三相异步电机带延时正反转控制

实验二十四三相异步电机带延时正反转控制在继电接触控制实验挂箱中完成本实验。
一、实验目的1. 通过对三相鼠笼式异步电动机延时正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
2. 加深对电气控制系统各种保护、自锁、互锁等环节的理解。
3. 学会分析、排除继电--接触控制线路故障的方法。
二、原理说明在鼠笼电机延时正反转控制线路中,通过相序的更换来改变电动机的旋转方向。
本实验给出两种不同的正、反转控制线路如图6-24-1及6-24-2,具有如下特点:1.电气互锁为了避免接触器KM1(正转)、KM2(反转)同时得电吸合造成三相电源短路,在KM1(KM2)线圈支路中串接有KM1(KM2)动断触头,它们保证了线路工作时KM1、KM2不会同时得电(如图6-24-1),以达到电气互锁目的。
2. 电气和机械双重互锁除电气互锁外,可再采用复合按钮SB1与SB2组成的机械互锁环节(如图6-24-2),以求线路工作更加可靠。
3. 线路具有短路、过载、失、欠压保护等功能。
三、实验设备四、实验内容认识各电器的结构、图形符号、接线方法;抄录电动机及各电器铭牌数据;并用万用电表Ω档检查各电器线圈、触头是否完好。
按图6-25-1接线,经指导教师检查后,方可进行通电操作。
实验步骤:(1) 开启控制屏电源总开关。
(2) 按正向起动按钮SB2,观察并记录电动机的转向和接触器的运行情况。
(3) 按停止按钮SB3,观察并记录电动机的转向和接触器的运行情况。
(4) 调整时间继电器的整定时间,观察接触器KM1、KM2的动作时间是否相应地改变。
(5) 再按SB2,观察并记录电动机的转向和接触器的运行情况。
(6) 实验完毕,按控制屏停止按钮,切断三相交流电源。
电机正反转控制实验报告

电机正反转控制实验报告电机正反转控制实验报告电机正反转控制实验报告一、实验目的1、掌握可编程控制器的工作原理。
2、通过动手接线,提高学生的实际动手能力以及加强对PLC基本结构的了解。
3、通过实验,加强学生对PLC逻辑顺序编程的理解,使学生能够熟练应用三菱PLC的开发工具软件和软元件。
二、实验内容三.硬件电路图将PLC与实验装置上面的接线端子连接,通过PLC来对上面的电机进行控制。
四、PLC梯形图PLC梯形图如下:I/O分配如下:五、工作原理当启动按钮SB1按下时,X0接通,系统进入工作状态,当停止按钮SB2接通时,X1接通,系统停止工作。
当SB1按下而SB2断开时,且电机没有进行正转或反转,此时若按下SB3,即正转按钮,,则X3接通,此时Y0输出为1,正转接触器KM1吸合,电机正转。
同理按下SB4,则X3为1,Y1为1,KM2吸合,点击反转。
若电机在正转过程中按下SB3,则电机停止正转,寄存器M1接通,而后计时器T0进行2秒计时,计时完成后T0为1,X1,X2,Y0均为0且M1为1,则Y1接通,进入反转。
同理课设计电机反转过程中按下正转按钮后延时2s进入正转。
六、使用说明书按下启动按钮SB1,再按下正转按钮SB3.,正传接触器KM1吸合,电机正转。
再按下反转按钮SB4,经过短暂延时(2s)后(可以避免机械接触器反应迟钝所造成的事故),反转接触器KM2吸合,电机反转。
扩展阅读:电动机正反转实验报告实验一三相异步电动机的正反转控制线路一、实验目的1、掌握三相异步电动机正反转的原理和方法。
2、掌握手动控制正反转控制、接触器联锁正反转、按钮联锁正反转控制线路的不同接法。
二、实验设备三相鼠笼异步电动机、继电接触控制挂箱等三、实验方法1、接触器联锁正反转控制线路(1)按下“关”按钮切断交流电源,按下图接线。
经指导老师检查无误后,按下“开”按钮通电操作。
(2)合上电源开关Q1,接通220V三相交流电源。
(3)按下SB1,观察并记录电动机M的转向、接触器自锁和联锁触点的吸断情况。
PLC控制系统编程与实现课件任务五三相异步电动机正反转控制系统编程与实现

PLC控制系统编程与实现任务提出任务目标相关知识任务分析任务实施任务训练任务五三相异步电动机正反转控制系统编程与实现会运用“经验设计法”来设计三相异步电动机正反转控制系统梯形图程序,能够熟练运用编程软件进行联机调试。
1.了解经验设计法的一般步骤。
2.了解联锁控制的意义,并掌握PLC联锁控制的设计要点。
3. 掌握堆栈操作指令的应用。
二.任务目标(1) PLC联锁控制在生产机械的各种运动之间,往往存在着某种相互制约或者由一种运动制约着另一种运动的控制关系,一般均采用联锁控制来实现。
图2-6联锁(互锁)控制梯形图互锁控制方式经常用于控制电动机的减压起动、正反转、机床刀架的进给与快速移动、横梁升降及机床卡具的卡紧与放松等一些不能同时发生运动的控制。
⑵堆栈操作指令表2-5 堆栈操作指令的格式及功能指令名称语句表STL功能操作码操作数栈装载与指令(电路块串联指令)ALD 无将堆栈中第一层和第二层的值进行逻辑与操作,结果存入栈顶,堆栈深度减1栈装载或指令(电路块并联指令)OLD 无将堆栈中第一层和第二层的值进行逻辑或操作,结果存入栈顶,堆栈深度减1逻辑推入栈指令LPS 无复制栈顶的值并将其推入栈,栈低的值被推出并丢失逻辑读栈指令LRD 无复制堆栈中的第二个值到栈顶,堆栈没有推入栈或弹出栈操作,但旧的栈顶值被新的复制值取代逻辑弹出栈指令LPP 无弹出栈顶的值,堆栈的第二个值成为栈顶的值堆栈操作指令编程举例例1 电路块串联指令编程假定输入I0.0常开与I0.1常闭并联,I0.2常开与I0.3常开并联,并联后再串联输出到Q0.0。
图2-7 逻辑块“与”操作编程举例假定输入I0.0常开与I0.2常开串联,I0.1常闭与I0.3常开串联,串联后再并联输出到Q0.0。
图2-8 逻辑块“或”操作编程举例假定某逻辑控制梯形图程序如图2-9a所示,则与此对应的语句表指令如图2-9b所示。
图2-9 逻辑堆栈操作指令编程举例经验设计法也叫做试凑法。
三相异步电动机正反转控制电路图原理及plc接线与编程

三相异步电动机正反转控制电路图原理及plc接线与编程三相异步电动机正反转控制电路图原理及plc接线与编程在图1是三相异步电动机正反转控制的电路和继电器控制电路图,图2与3是功能与它相同的PLC控制系统的外部接线图和梯形图,其中,KM1和KM2分别是控制正转运行和反转运行的交流接触器.在梯形图中,用两个起保停电路来分别控制电动机的正转和反转。
按下正转启动按钮SB2,X0变ON,其常开触点接通,Y0的线圈“得电”并自保。
使KM1的线圈通电,电机开始正转运行。
按下停止按钮SB1,X2变ON,其常闭触点断开,使Y0线圈“失电”,电动机停止运行。
在梯形图中,将Y0与Y1的常闭触电分别与对方的线圈串联,可以保证他们不会同时为ON,因此KM1和KM2的线圈不会同时通电,这种安全措施在继电器电路中称为“互锁”。
除此之外,为了方便操作和保证Y0和Y1不会同时为ON,在梯形图中还设置了“按钮互锁”,即将反转启动按钮X1的常闭点与控制正转的Y0的线圈串联,将正转启动按钮X0的常闭触点与控制反转的Y1的线圈串联。
设Y0为ON,电动机正转,这是如果想改为反转运行,可以不安停止按钮SB1,直接安反转启动按钮SB3,X1变为ON,它的常闭触点断开,使Y0线圈“失电”,同时X1的敞开触点接通,使Y1的线圈“得电”,点击正转变为反转。
在梯形图中的互锁和按钮联锁电路只能保证输出模块中的与Y0和Y1对应的硬件继电器的常开触点心不会同时接通。
由于切换过程中电感的延时作用,可能会出现一个触点还未断弧,另一个却已合上的现象,从而造成瞬间短路故障。
可以用正反转切换时的延时来解决这一问题,但是这一方案会增大编程的工作量,也不能解决不述的接触触点故障引起的电源短路事故。
如果因主电路电流过大或者接触器质量不好,某一接触器的主触点被断电时产生的电弧熔焊而被粘结,其线圈断电后主触点仍然是接通的,这时如果另一个接触器的线圈通电,仍将造成三相电源短路事故。
电机正反转控制电路及实际接线图

在图1是三相异步电动机正反转控制的电路和继电器控制电路图,图2与3是功能与它相同的PLC控制系统的外部接线图和梯形图,其中,KM1和KM2分别是控制正转运行和反转运行的交流接触器.在梯形图中,用两个起保停电路来分别控制电动机的正转和反转。
按下正转启动按钮SB2,X0变ON,其常开触点接通,Y0的线圈“得电”并自保。
使KM1的线圈通电,电机开始正转运行。
按下停止按钮SB1,X2变ON,其常闭触点断开,使Y0线圈“失电”,电动机停止运行。
在梯形图中,将Y0与Y1的常闭触电分别与对方的线圈串联,可以保证他们不会同时为ON,因此KM1和KM2的线圈不会同时通电,这种安全措施在继电器电路中称为“互锁”。
除此之外,为了方便操作和保证Y0和Y1不会同时为ON,在梯形图中还设置了“按钮互锁”,即将反转启动按钮X1的常闭点与控制正转的Y0的线圈串联,将正转启动按钮X0的常闭触点与控制反转的Y1的线圈串联。
设Y0为ON,电动机正转,这是如果想改为反转运行,可以不安停止按钮SB1,直接安反转启动按钮SB3,X1变为ON,它的常闭触点断开,使Y0线圈“失电”,同时X1的敞开触点接通,使Y1的线圈“得电”,点击正转变为反转。
在梯形图中的互锁和按钮联锁电路只能保证输出模块中的与Y0和Y1对应的硬件继电器的常开触点心不会同时接通。
由于切换过程中电感的延时作用,可能会出现一个触点还未断弧,另一个却已合上的现象,从而造成瞬间短路故障。
可以用正反转切换时的延时来解决这一问题,但是这一方案会增大编程的工作量,也不能解决不述的接触触点故障引起的电源短路事故。
如果因主电路电流过大或者接触器质量不好,某一接触器的主触点被断电时产生的电弧熔焊而被粘结,其线圈断电后主触点仍然是接通的,这时如果另一个接触器的线圈通电,仍将造成三相电源短路事故。
为了防止出现这种情况,应在PLC外部设置KM1和KM2的辅助常闭触点组成的硬件互锁电路(见图2),假设KM1的主触点被电弧熔焊,这时它与KM2线圈串联的辅助常闭触点处于断开状态,因此KM2的线圈不可能得电。
电机正反转控制实验报告
电机正反转控制实验报告
一、实验目的
1、掌握可编程控制器的工作原理。
2、通过动手接线,提高学生的实际动手能力以及加强对PLC基本结构的了解。
3、通过实验,加强学生对PLC逻辑顺序编程的理解,使学生能够熟练应用三菱PLC的开发工具软件和软元件。
二、实验内容
三.硬件电路图
将PLC与实验装置上面的接线端子连接,通过PLC来对上面的电机进行控制。
四、
五、PLC梯形图
PLC梯形图如下:
I/O分配如下:
六、
七、工作原理
当启动按钮SB1按下时,X0接通,系统进入工作状态,当停止按钮SB2接通时,X1接通,系统停止工作。
当SB1按下而SB2断开时,且电机没有进行正转或反转,此时若按下SB3,即正转按钮,,则X3接通,此时Y0输出为1,正转接触器KM1吸合,电机正转。
同理按下SB4,则X3为1,Y1为1,KM2吸合,点击反转。
若电机在正转过程中按下SB3,则电机停止正转,寄存器M1接通,而后计时器T0进行2秒计时,计时完成后T0为1,X1,X2,Y0均为0且M1为1,则Y1接通,进入反转。
同理课设计电机反转过程中按下正转按钮后延时2s进入正转。
八、
九、使用说明书
按下启动按钮SB1,再按下正转按钮SB3.,正传接触器KM1吸合,电机正转。
再按下反转按钮SB4,经过短暂延时(2s)后(可以避免机械接触器反应迟钝所造成的事故),反转接触器KM2吸合,电机反转。
PLC 控制三相异步电动机正反转实验

本文下载地址:搜索PLC实验二PLC 控制三相异步电动机正反转实验一、实验目的1.学习和掌握PLC的实际操作和使用方法;2.学习和掌握PLC控制三相异步电动机正反转的硬件电路设计方法;3.学习和掌握PLC控制三相异步电动机正反转的程序设计方法;4.学习和掌握PLC控制系统的现场接线与软硬件调试方法。
二、实验原理三相异步电动机定子三相绕组接入三相交流电,产生旋转磁场,旋转磁场切割转子绕组产生感应电流和电磁力,在感应电流和电磁力的共同作用下,转子随着旋转磁场的旋转方向转动。
因此转子的旋转方向是通过改变定子旋转磁场旋转的方向来实现的,而旋转磁场的旋转方向只需改变三相定子绕组任意两相的电源相序就可实现。
如图2.1所示为PLC控制异步电动机正反转的实验原理电路。
图2.1 PLC控制三相异步电动机正反转实验原理图左边部分为三相异步电动机正反转控制的主回路。
由图 2.1可知:如果KM5的主触头闭合时电动机正转,那么KM6 主触头闭合时电动机则反转,但KM5 和KM6 的主向按钮接PLC的输入口X0,反向按钮接PLC的输入口X1,停止按钮接PLC的输入口X2;继电器KA4、KA5 分别接于PLC 的输出口Y33、Y34,KA4、KA5 的触头又分别控制接触器KM5和KM6的线圈。
实验中所使用的PLC为三菱FX2N系列晶体管输出型的,由于晶体管输出型的输出电流比较小,不能直接驱动接触器的线圈,因此在电路中用继电器KA4、KA5 做中间转换电路。
在KM5和KM6线圈回路中互串常闭触头进行硬件互锁,保证软件错误后不致于主回路短路引起断路器自动断开。
电路基本工作原理为:合上QF1、QF5,给电路供电。
当按下正向按钮,控制程序要使Y33为1,继电器KA4线圈得电,其常开触点闭合,接触器KM5的线圈得电,主触头闭合,电动机正转;当按下反向按钮,控制程序要使Y34 为1,继电器KA5 线圈得电,其常开触点闭合,接触器KM6的线圈得电,主触头闭合,电动机反转。
PLC控制三相异步电机正反转

目录一、可行性报告 (2)1、项目目的 (2)2、项目背景及发展概况 (2)3、可行性 (3)二、设计说明 (3)1、器材 (3)2、整体思路 (4)3、系统流程图 (4)4、实验步骤 (5)三、三相异步电机的正反转PLC控制 (5)3.1 PLC定时器控制电动机正反转电路的主接线图 (7)3. 2 PLC定时器控制三相异步电动机正反转的梯形图 (8)3.3定时器控制电动机正反转的指令表程序 (9)3.4 PLC的I/O分配 (10)3.5 实体框形图 (11)结论 (12)电机控制一、可行性报告1、项目目的1)、了解机床电气中三相电机的正反转控制和星三角启动控制。
2)、掌握电动机的常规控制电路设计。
3)、了解电动机电路的实际接线。
4)、掌握GE FANUC 3I 系统的电动机启动程序编写。
2、项目背景及发展概况三相异步电动机的应用非常广泛,具有机构简单,效率高,控制方便,运行可靠,易于维修成本低的有点,几乎涵盖了工农业生产和人类生活的各个领域,在这些应用领域中,三相异步电动机运行的环境不同,所以造成其故障的发生也很频繁,所以要正确合理的利用它,要合理的控制它。
这个系统的控制是采用PLC的编程语言----梯形图,梯形语言是在可编程控制器中的应用最广的语言,因为它在继电器的基础上加进了许多功能,使用灵活的指令,使逻辑关系清晰直观,编程容易,可读性强,所实现的功能也大大超过传统的继电器控制电路,可编程控制器是一种数字运算操作的电子系统,它是专为在恶劣工业环境下应用而设计,它采用可编程序的存储器,用来在内部存储执行逻辑运算,顺序控制,定时,计数和算术等操作的指令,并采用数字式,模拟式的输入和输出,控制各种的机械或生产过程。
长期以来,PLC始终处于工业自动化控制领域的主战场,为各种各样的自动化设备提供了非常可靠的控制应用,它能够为自动化控制应用提供安全可靠和比较完善的解决方案,适合于当前工业,企业对自动化的需要。
三相异步电动机接触器联锁的正反转控制

三相异步电动机接触器联锁的正反转控制在工业领域中,三相异步电动机是一种常见的电动机类型,广泛应用于机械设备的驱动系统中。
为了实现电机的正反转控制,通常需要采用接触器联锁的方法,通过控制接触器的动作来实现电机的正反转切换。
本文将详细介绍三相异步电动机接触器联锁的正反转控制原理和方法。
一、三相异步电动机的基本原理三相异步电动机是由三个相位互相错开120度的线圈组成,当电机通电时,电流通过线圈产生旋转磁场,从而带动转子转动。
根据电流的方向和大小,电动机可以实现正转和反转的运动。
实现电机正反转控制的关键是控制电流的方向和大小,而接触器则是实现电流控制的重要设备。
二、接触器的基本原理接触器是一种电气开关装置,通过控制主触头和辅助触头之间的接通和断开来控制电路的通断。
主触头由电磁铁控制,当电磁铁通电时,主触头闭合,电路通电;当电磁铁断电时,主触头断开,电路断电。
辅助触头用于控制主触头的闭合和断开动作,通过控制辅助触头的状态和电流大小,可以实现接触器的正反转控制。
三、接触器联锁的正反转控制原理接触器联锁的正反转控制原理是基于电机正反转的电流方向和大小不同。
当电机需要正转时,需要将接触器的辅助触头接通,使电流流经电机的相应线圈,从而实现电机正转。
当电机需要反转时,需要将接触器的辅助触头断开,使电流无法流经电机的相应线圈,从而实现电机反转。
通过控制接触器的辅助触头状态,可以实现电机的正反转切换。
四、三相异步电动机接触器联锁的正反转控制方法实现三相异步电动机接触器联锁的正反转控制方法有多种,常用的方法包括电气控制和PLC控制两种。
1. 电气控制方法电气控制方法是通过电路和开关来控制接触器的动作,实现电机的正反转控制。
在电路中设置正转按钮和反转按钮,通过按下按钮来控制接触器的辅助触头状态。
当按下正转按钮时,辅助触头接通,实现电机正转;当按下反转按钮时,辅助触头断开,实现电机反转。
2. PLC控制方法PLC控制方法是通过PLC(可编程逻辑控制器)来控制接触器的动作,实现电机的正反转控制。
09-用PLC进行三相异步电动机正、反转控制线路设计

实验九用PLC进行三相异步电动机正、反转控制线路设计一、实验目的掌握使用PLC实现三相异步电动机的正反转控制。
二、实验原理图a)主电路b)控制电路c)梯形图图1原理图三、控制要求开关QS作为总电源开关。
按下SB1,KM1吸合,电动机正向转动。
按下SB2,KM2吸合,电动机反向转动。
按下SB3,KM1(或KM2)释放,电动机停止。
开关S1与热继电器FR并接,可以用于模拟FR的动作。
四、梯形图并写出程序,实验梯形图参考图7-15步序指令器件号说明步序指令器件号说明0 LD X0 正转起动7 OR Y11 OR Y0 8 ANI X12 ANI X1 9 ANI X2 停止3 ANI X2 停止10 ANI X3 过载保护4 ANI X3 过载保护11 OUT Y1 反转5 OUT Y0 正转12 END6 LD X1 反转起动1.控制回路接线将PWD-41A挂件上PLC输出端的COM、COM0、COM1相接。
按照输入输出配置将PWD-43挂件三相鼠笼异步电动机控制模块的SB1、SB2、SB3、FR分别接到PWD-41A上PLC的输入端X0、X1、X2、X3;将S1接到FR;COM接到PLC输入端的COM。
KM1、K2接到PLC输出端的Y0、Y1;N接到PLC输出端的COM。
输入输出X0 正转(SB1)Y0 正转X1 反转(SB2)Y1 反转将QS的三个输入端(黄、绿、红)分别接到PWD02电源控制屏上的三相电源U、V、W,将N接到PWD02上的N。
将KM1黄色端与KM2的红色端子相接,KM1、KM2的绿色端子相接,KM1红色端子与KM2黄色端子相接,然后将FR的三个输出端(黄、绿、红)分别接到三相异步电动机(DJ24)接线盒上的A、B、C,将DJ24的X、Y、Z短接。
三、实验操作过程按实验接线接好连线,待老师检查无误后方可往下进行。
将程序输入PLC中并运行,按下PDC01A电源控制屏上的启动按钮将控制屏启动接通三相电源。
三相异步电机自动循环正反转控制案例

4.子程序调用程序
项目七: PLC功能指令应用
程序解析:调用三个子程序 M1常开触点闭合时,调用子程序P1 M2常开触点或M8常开触点闭合时,调用子程序P2 M5常开触点闭合时,调用子程序P3
5.子程序P1
项目七: PLC功能指令应用
程序解析
P1子程序的作用是是输出继电器Y000得电, 输出继电器Y001失电;即使交流接触器KM1的 线圈得电,KM2的线圈失电,即使电机M1正转;
6.子程序P2
项目七: PLC功能指令应用
程序解析
P2子程序的作用是使输出继电器Y000,Y001 全部失电,交流接触器KM1和KM2的线圈都失 电,电机停止转动;
7.子程序P3
项目七: PLC功能指令应用
程序解析
P3子程序的作用是是输出继电器Y001得电, 输出继电器Y000失电;即使交流接触器KM2的 线圈得电,KM1的线圈失电,即使电机M1反转;
项目七: PLC功能指令应用
二、三相异步电机自动循环正反转控制案例的电气原理图 1.主配表
项目七: PLC功能指令应用
输入
输入设备
输入继电器
启动按钮SB1
X0
停止按钮SB2
X1
输出
输出设备
输出继电器
正转线圈KM1
Y0
反转线圈KM2
Y1
项目七: PLC功能指令应用
XXXXX XXXXX
项目七: PLC功能指令应用
三相异步电机自动循环正反转控制案例
XXXXX XXXXX
项目七: PLC功能指令应用
一、三相异步电机自动循环正反转控制案例描述
三相异步电动机M1的启动按钮为SB1,停止按钮为SB2。 按下SB1启动按钮后,电机M1开始正转,正转10S后, 电机自动停止,停止10S后电机自动启动并开始反转, 反转10S后电机自动停止,停止10S后又自动开始正传, M1按照这种运行规律以此往复,循环运行。任意时刻 按下停止按钮SB2,电机彻底停止。
plc控制电动机正反转梯形图

plc控制电动机正反转梯形图
利用两个或多个常闭触点来保证线圈不会同时通电的功能成为“互锁”。
三相异步电动机的正反转控制电路即为典型的互锁电路,如图所示。
其中KMl和KM2分别是控制正转运行和反转运行的交流接触器。
图三相异步电动机的正反转控制电路
如图所示为采用plc控制三相异步电动机正反转的外部I/O接线图和梯形图。
实现正反转控制功能的梯形图是由两个起保停的梯形图再加上两者之间的互锁触点构成。
图用PLC控制电动机正反转的I/O接线图和梯形图
应该注意的是虽然在梯形图中已经有了软继电器的互锁触点(X1与X0、Y1与Y0),但在I/O接线图的输出电路中还必须使用KM1、KM2的常闭触点进行硬件互锁。
因为PLC软继电器互锁只相差一个扫描周期,而外部硬件接触器触点的断开时间往往大于一个扫描周期,来不及响应,且触点的断开时间一般较闭合时间长。
例如Y0虽然断开,可能KM1的触点还未断开,在没有外部硬件互锁的情况下,KM2的触点可能接通,引起主电路短路,因此必须采用软硬件双重互锁。
采用了双重互锁,同时也避免因接触器KM1或KM2的主触点熔焊引起电动机主电路短路。
用PLC控制三相异步电动机正反转
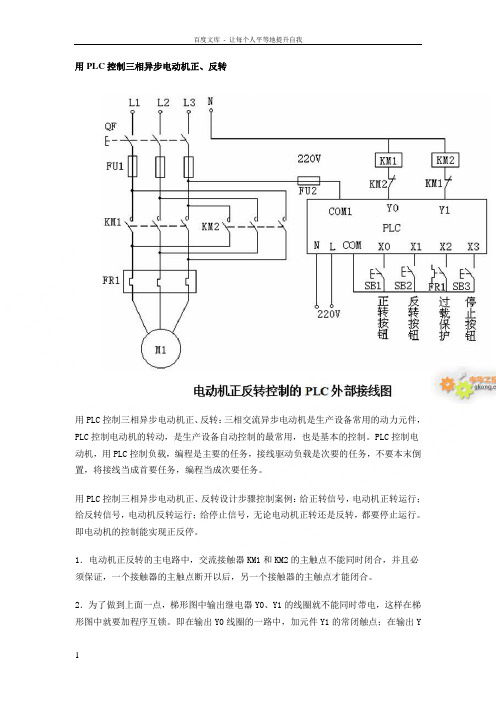
用PLC控制三相异步电动机正、反转用PLC控制三相异步电动机正、反转:三相交流异步电动机是生产设备常用的动力元件,PLC控制电动机的转动,是生产设备自动控制的最常用,也是基本的控制。
PLC控制电动机,用PLC控制负载,编程是主要的任务,接线驱动负载是次要的任务,不要本末倒置,将接线当成首要任务,编程当成次要任务。
用PLC控制三相异步电动机正、反转设计步骤控制案例:给正转信号,电动机正转运行;给反转信号,电动机反转运行;给停止信号,无论电动机正转还是反转,都要停止运行。
即电动机的控制能实现正反停。
1.电动机正反转的主电路中,交流接触器KM1和KM2的主触点不能同时闭合,并且必须保证,一个接触器的主触点断开以后,另一个接触器的主触点才能闭合。
2.为了做到上面一点,梯形图中输出继电器Y0、Y1的线圈就不能同时带电,这样在梯形图中就要加程序互锁。
即在输出Y0线圈的一路中,加元件Y1的常闭触点;在输出Y1线圈的一路中,加元件Y0的常闭触点。
当Y0的线圈带电时,Y1的线圈因Y¬0的常闭触点断开而不能得电;同样的道理,当Y1的线圈带电时,Y0的线圈因Y¬1的常闭触点断开而不能得电。
3.为了保证电动机能从正转直接切换到反转,梯形图中必须加类似按钮机械互锁的程序互锁。
即在输出Y0线圈的一路中,加反转控制信号X1的常闭触点;在输出Y1线圈的一路中,加正转控制信号X0的常闭触点。
这样能做到电动机正反转的直接切换。
当电动机加正转控制信号时,输入继电器X0的常开触点闭合,常闭触点断开。
常闭触点断开反转输出Y1的线圈,交流接触器KM2的线圈失电,电动机停止反转,同时Y1的常闭触点闭合,正转输出继电器Y0的线圈带电,交流接触器KM1的线圈得电,电动机正转。
当电动机加反转控制信号时,输入继电器X1的常开触点闭合,常闭触点断开。
常闭触点断开正转输出Y0的线圈,交流接触器KM1的线圈失电,电动机停止正转,同时Y 0的常闭触点闭合,反转输出继电器Y1的线圈带电,交流接触器KM2的线圈得电,电动机正转。
用PLC实现三相异步电动机的正反转控制电路教学设计方案
用PLC实现三相异步电动机的正反转控制电路教学设计方案嘿,大家好!今天我来给大家分享一个实用的教学设计方案——用PLC实现三相异步电动机的正反转控制电路。
作为一名有着十年方案写作经验的大师,我会尽量让这个方案简单易懂,跟着我一起来探索吧!一、教学目标1.让学生掌握PLC的基本原理和编程方法。
2.培养学生运用PLC实现电动机正反转控制电路的能力。
3.提高学生的实际动手操作能力和创新思维。
二、教学内容1.PLC的基本原理和编程方法。
2.三相异步电动机的正反转控制电路原理。
3.PLC与电动机控制电路的连接方法。
三、教学重点与难点1.教学重点:PLC的编程方法和电动机正反转控制电路的设计。
2.教学难点:PLC与电动机控制电路的连接及编程技巧。
四、教学步骤1.理论讲解(1)介绍PLC的基本原理和编程方法。
PLC(可编程逻辑控制器)是一种以微处理器为核心,采用可编程存储器存储用户程序,实现各种逻辑、定时、计数、运算等功能的控制器。
它广泛应用于工业控制领域,具有可靠性高、编程简单、易于扩展等优点。
(2)讲解三相异步电动机的正反转控制电路原理。
三相异步电动机的正反转控制电路是指通过改变电动机的电源相序,实现电动机的正反转运行。
通常采用接触器来实现电源相序的改变,从而实现电动机的正反转控制。
2.实践操作(1)准备实验设备①PLC控制器②三相异步电动机③接触器④继电器⑤电源(2)连接PLC与电动机控制电路①将PLC的输入端与电动机控制电路的输入端相连。
②将PLC的输出端与接触器的线圈相连。
③将接触器的触点与电动机的电源相连。
(3)编写PLC程序①分析电动机正反转控制电路的输入信号和输出信号。
②根据输入信号和输出信号,编写PLC程序。
//正转IF(按钮1按下)THEN输出1=1;//接触器1得电,电动机正转输出2=0;//接触器2失电,电动机不反转ENDIF//反转IF(按钮2按下)THEN输出1=0;//接触器1失电,电动机不反转输出2=1;//接触器2得电,电动机反转ENDIF(4)调试与优化(2)拓展学生的学习思路,引导学生思考如何将PLC应用于其他工业控制场景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在图1是三相异步电动机正反转控制的电路和继电器控制电路图,图2与3是功能与它相同的PLC控制系统的外部接线图和梯形图,其中,KM1和KM2分别是控制正转运行和反转运行的交流接触器.
在梯形图中,用两个起保停电路来分别控制电动机的正转和反转。
按下正转启动按钮SB2,X0变ON,其常开触点接通,Y0的线圈“得电”并自保。
使KM1的线圈通电,电机开始正转运行。
按下停止按钮SB1,X2变ON,其常闭触点断开,使Y0线圈“失电”,电动机停止运行。
在梯形图中,将Y0与Y1的常闭触电分别与对方的线圈串联,可以保证他们不会同时为ON,因此KM1和KM2的线圈不会同时通电,这种安全措施在继电器电路中称为“互锁”。
除此之外,为了方便操作和保证Y0和Y1不会同时为ON,在梯形图中还设置了“按钮互锁”,即将反转启动按钮X1的常闭点与控制正转的Y0的线圈串联,将正转启动按钮X0的常闭触点与控制反转的Y1的线圈串联。
设Y0为ON,电动机正转,这是如果想改为反转运行,可以不安停止按钮SB1,直接安反转启动按钮SB3,X1变为ON,它的常闭触点断开,使Y0线圈“失电”,同时X1的敞开触点接通,使Y1的线圈“得电”,点击正转变为反转。
在梯形图中的互锁和按钮联锁电路只能保证输出模块中的与Y0和Y 1对应的硬件继电器的常开触点心不会同时接通。
由于切换过程中电感的延时作用,可能会出现一个触点还未断弧,另一个却已合上的现象,从而造成瞬间短路故障。
可以用正反转切换时的延时来解决这一问题,但是这一方案会增大编程的工作量,也不能解决不述的接触触点故障引起的电源短路事故。
如果因主电路电流过大或者接触器质量不好,某一接触器的主触点被断电时产生的电弧熔
焊而被粘结,其线圈断电后主触点仍然是接通的,这时如果另一个接触器的线圈通电,仍将造成三相电源短路事故。
为了防止出现这种情况,应在PLC外部设置KM1和KM2的辅助常闭触点组成的硬件互锁电路(见图2),假设KM1的主触点被电弧熔焊,这时它与KM2线圈串联的辅助常闭触点处于断开状态,因此KM2的线圈不可能得电。
图1中的FR是作过载保护用的热继电器,异步电动机长期严重过载时,经过一定延时,热继电器的常开触点断开,常开触点闭合。
其常闭触点与接触器的线圈串联,过载时接触其线圈断电,电机停止运行,起到保护作
用。
有的热继电器需要手动复位,即热继电器动作后要按一下它自带的复位按钮,其触点才会恢复原状,及常开触点断开,常闭触点闭合。
这种热继电器的常闭触点可以像图2那样接在PLC的输出回路,仍然与接触器的线圈串联,这反而可以节约PLC的一个输入点。
有的热继电器有自动复位功能,即热继电器动作后电机停止转,串接在主回路中的热继电器的原件冷却,热继电器的触点自动恢复原状。
如果这种热断电器的常闭触点仍然接在PLC的输出回路,电机停止转动后果一段时间会因热继电器的触点恢复原状而自动重新运转,可能会造成设备和人身事故。
因此有自动复位功能的热继电器的常闭触点不能接在PLC的输出回路,必须将它的触点接在PLC的输入端(可接常开触点或常闭触点),用梯形图来实现点击的过载保护。
如果用电子式电机过载保护来代替热继电器,也应注意它的复位.。