第五次课程作业
西南交通大学概率论和数理统计第五次作业答案

3
西南交通大学 2019—2020 学年第(一)学期《概率论与数理统计 B》课程习题答案
解:因为 X n
N (0,1) ,所以
9. 设 X1, X 2,, X5 是独立且服从相同分布的随机变量,且每一个 Xi i 1,2,,5都服从
N
0,1
。(1)试给出常数 c
,使得
c
X12
X
2 2
服从 2 分布,并指出它的自由度;(2)试给
出常数 d ,使得 d X1 X 2 服从 t 分布,并指出它的自由度。
X
2 3
X
2 4
11. 设 X1, X 2 ,, X n 是取自总体 X 的一个样本,其中 X 服从参数为 的泊松分布,其
中 未知, 0 ,求 的矩估计与最大似然估计,如得到一组样本观测值:
X
0 1 2 34
频数 17 20 10 2 1
求 的矩估计值与最大似然估计值。
解: EX ,故 的矩估计量 ˆ X 。
X
另,X 的密度函数为
f X x
e x 0
x 0 x0
故似然函数为
L
对数似然函数为
n
en
Xi
i 1
0
X i 0, i 1,2,, n 其他
ln
L
n
ln
n
X
i
i 1
d
ln L
d
n
n
i 1
Xi
0
解得 的最大似然估计量 ˆ n 1 。
量子力学第五次作业(2018-2019)

基矢。)
5 定义反厄米算符:Q† = −Q. (1)证明一个反厄米算符的本征值是个虚数。 (2) 证明两个厄米算符的对易式是反厄米的。( 两个算符的对易式定义 为[A, B] ≡ AB − BA) (3) 两个反厄米算符的对易式是怎样的?
1
量子力学第五次作业(2018-2019)
1 证明Sz = 2 (|+, z +, z| − |−, z −, z|). (提示:算符是通过对任意态的作 用效果来表征的)
2 考虑|1 , |2 , |3 是某力学量的正交归一本征态。某右失|α = i|1 − 2|2 − i|3 , 另一右矢|β = i|1 + 2|3 . (1) 写出两个右矢的对应左矢. (2) 求出 α|β 和 β|α (3) 将两个右矢归一化.
3 设|n 和|k 是力学量F 的本征态矢,属于不同本征值。算符G与F 对易, 证明 k|G|n = 0.
4 对两个算符X, Y , 证明:Tr(XY ) = Tr(Y X).
如
果X,
Y
是
厄
密
的
ห้องสมุดไป่ตู้
,X
Y
并
不
一
定
是
厄
密
的
。
但
是
证
明
1 2
(X
Y
+ Y X)
与
1 2i
(X
Y
− Y X)是厄密的。
(提示:TrQ ≡ i i|Q|i , 称为求Q的迹(trace), 其中|i 是正交归一的完备
《中医诊断学Z》第5次作业
《中医诊断学Z》第5次作业您本学期选择了“中医诊断学Z”说明:本次作业的知识点为:5.2--6.4,总分为62分,您的得分为62分A型题:请从备选答案中选取一个最佳答案1. 壮热汗出,口渴,头痛,微恶风寒,尿黄便结,舌红苔黄,脉洪数。
为: [1分]A.表里实热证B.表实寒里虚寒证C.表寒里热证D.表热里寒证E.表实寒里虚热证2. 下列哪项不是阳虚证症状: [1分]A.面色淡白B.口淡不渴C.大便稀溏D.畏寒肢冷E.无汗或汗少而粘3. 低烧两年,盗汗颧红,现恶寒甚,低热,头身痛无汗,脉浮细数。
为: [1分]A.表里实热证B.表实寒里虚寒证C.表寒里热证D.表热里寒证E.表实寒里虚热证4. 下列哪一项不属于火淫证的变化: [1分]A.发热恶寒B.壮热神昏C.生疮成脓D.吐血衄血E.口淡不渴5. 阳虚与气虚的主要区别是: [1分]A.有无少气懒言B.有无神疲乏力C.寒象是否明显D.小便是否清长E.舌质是否淡嫩6. 亡阳亡阴的共同之处,错误的是: [1分]A.病变趋势极其危急B.见于病久体弱患者C.出现在病情危重之时D.以出现“绝汗”为特征E.对方亦可随之而亡7. 下列哪项是伤于湿邪所致的头痛的特点: [1分]A.头痛欲裂B.头脑空痛C.头重而痛D.头痛连齿E.头痛绵绵8. 下肢痿软无力,不能站立,神疲嗜睡,食少,舌淡嫩,脉缓弱,是: [1分]A.气陷证B.气虚证C.气不固证D.气脱证E.气逆证9. 痰饮、悬饮、支饮、溢饮主要是根据下列哪项而命名: [1分]A.饮邪性质B.饮邪多少C.饮停部位D.饮停先后E.饮停的原因10. 下述哪项不能称为八纲证候之间的关系: [1分]A.证候相兼B.证候错杂C.证候独立D.证候真假E.证候转化11. 瘀、石、虫、痰等阻滞所致之“气闭”,最突出的表现是: [1分]A.神识不清B.绞痛阵作C.肢厥脉微D.患处胀痛E.胀闷不舒12. 血寒证的特征是: [1分]A.吐血色鲜红质稠B.局部疮疖红肿热痛C.拘急冷痛,肤色紫暗D.疼痛如针刺E.腹内肿块坚硬13. 下述哪项不是血瘀证的表现: [1分]A.皮肤有紫色斑块B.腹壁青筋暴露C.出血紫暗夹块D.舌淡胖苔腻或滑E.脉细涩、弦涩14. 脘腹冷痛,喜温喜按,畏冷肢凉,今起恶寒,头痛无汗,脉濡缓。
第5678次作业 答案操作系统 大学课程 作业

i第五次作业书上的作业9.2内部碎片与外部碎片之间的区别?答:一个作业占据了一个内存区域或者页,但是其中的一部分没有使用,把没有使用的部分称为内部碎片。
内部碎片不会被操作系统或者其他进程使用,除非这个作业执行完并且释放它所占用的内存区域。
外部碎片是在分区之间存在的不能够被使用的小的内存。
9.5内存按顺序有100k,500k,200k,300k,600k,用首次适应、最佳适应和最差适应如何放置212k,417k,112k,426k的进程?答:(1)首次适应算法212K 放入 500K 的分区417K 放入 600K 的分区112K 放入 288K 的分区(产生新的分区 288K = 500K - 212K)426K 必须等待(2)最佳适应算法212K放入300K的分区417K放入500K的分区112K放入200K的分区426K放入600K的分区(3)最差适应算法212K放入600K 的分区417K放入500K 的分区112K放入388K 的分区426K 必须等待在这个例子中,最佳适应算法是最好的。
9.8假设一个有8个1k页面的逻辑地址空间,映射到一个32个页框的物理内存,问:逻辑地址多少位?物理地址多少位?a. 逻辑地址: 13 bitsb. 物理地址: 15 bits9.14为什么纯分段比纯分页更容易实现共享可充入模块。
答:因为段是基于内存逻辑划分而非物理划分,因此任意长度的段都可以通过段表的一个表项来实现共享。
而对于分页系统来说,只能对每个页实现共享,而页面的大小是固定不变的。
9.16 有段表段基地址长度0 219 6001 2300 142 90 1003 1327 5804 1952 96下面的物理地址是多少?a)0,430; b)1,10; c)2,500; d)3,400;e)4,122答:a. 219 + 430 = 649b. 2300 + 10 = 2310c.地址错误d. 1327 + 400 = 1727e.地址错误补充作业1.在页面大小为4k的系统中,根据图中所示页表,下面的逻辑地址经过重定位之后的物理地址是什么?a)20;b)4100;c)8300答:(a) 49172 (b)57348 (c) 615482.一台计算机为每个进程提供65536字节的地址空间,页面的大小为4k。
大学生心理健康教育课程第五次作业 写下你曾经遭遇的一次重大挫
大学生心理健康教育课程第五次作业写下你曾经遭遇的一次重大挫
人的一生不可能都是顺利的,每个人都会经历挫折。
但正是因为这些挫折,我们才会变得更加的成熟与自信。
我就有过这样一次经历。
记得上初一的时侯,我的每一次成绩都名列前茅,每次都会得到很多人的赞美与羡慕,这让我一直陶醉在其中。
可是谁能想到,在一次考试中,我发挥失常,竟然一度降到了班级十几名,这让我感到非常伤心,这是我从来没有想到的,对学习成绩一直优秀的我是一个沉重打击。
知道成绩后,我不敢面对老师与同学,因为我知道等待我的将会是批评与嘲笑,看着我的成绩,我潸然泪下!
过了不久,成老师把我叫到了办公室,我也做好了挨批评的心理准备,把头低下不敢望老师。
和我想的恰恰相反,成老师没有批评我,他告诉了我一些话,至今让我记忆犹新:“每个人都会经历坎坷与挫折,重要的不是困难本身,而是你面对困难的态度,要是从此一蹶不振,那说明你是多么的不堪一击,经不起风雨。
我们现在要做的是分析考试失败的原因,克服自己的缺点,然后再朝着自己的目标去努力,相信成功会属于你的。
我们也相信雨后的彩虹会更加的光彩夺目!”听了老师的这番话,我使劲地点了点头:我应该振作起来,战胜挫折!我回到了教室,同学们也纷纷送来了关心的话语:“加油”,“下一次一定会成功的”,“我们都支持你”。
我好感动,我一定不会让同学和老师失望的,我找回了曾经的自信。
分析原因之后,经过我的努力,下一次的考试,我又成为了班级的佼佼者。
会计学第五次作业

会计学原理作业下个星期四月21日交习题一(一)目的练习总分类账户和明细分类账户的平行登记(二)资料1、某公司200×3月31日有关总分类账户和明细分类账户余额如下:(1)总分类账户:“原材料”账户借方余额200000元。
“应付账款”账户贷方余额50000元。
(2)明细分类账户:“原材料——甲材料”账户800千克,单价150元,借方余额120000元。
“原材料——乙材料”账户200千克,单价100元,借方余额20000元。
“原材料——丙材料”账户500千克,单价120元,借方余额60000元,“应付账款——A公司”账户贷方余额30000元。
“应付账款——B公司”账户贷方余额20000元。
2.该公司1996年4月份发生部分经济业务如下:(1)以银行存款偿还A公司前欠货款15 000元。
(2)购进甲材料100千克,单价150元,税价合计17 550元(含增值税17%),以银行存款支付,材料入库。
(3)生产车间向仓库领用材料一批,计甲材料200千克,单价150元,乙材料100千克,单价100元,丙材料250千克,单价120元,共计领料金额70000元。
(4)以银行存款偿还B公司前欠货款10000元。
(5)向A公司购入乙材料100千克,单价100元,材料入库,货款11 700元(含增值税17%),以银行存款支付。
(三)要求1.根据资料2内容编制会计分录。
2.开设“原材料”、“应付账款”总分类账和明细分类账,登记期初余额,并平行登记总分类账和明细分类账,并结出各账户本期发生额和期末余额。
3.编制“原材料”、“应付账款”总分类账和明细分类账本期发生额及余额明细表。
习题二(一)目的练习财务成果的核算。
(二)资料3.12月份内发生以下收支经济业务:(1)出售产品一批,售价58500元(含增值税17%),货款收到存入银行。
(2)按出售产品的实际销售成本32000元转账。
(3)按5%税率计算销售产品应交纳的消费税5000元。
北京中医药大学远程教育学院《金匮要略B》第5次作业
《金匮要略B》第5次作业您本学期选择了“金匮要略B”B型题:下列每组题有多个备选答案,每个备选答案可以使用一次或重复使用,也可以不选,请选择正确答案A.鼻头色青者B.鼻头色微黑者C.面色黄者D.面色赤者E.面色白者1. 肾水反侮脾土之面部见证:C [1分]2. 胸上有寒的面部见证:B [1分]A.散饮去结B.顺气止呕C.降逆化饮D.湿中止呕E.和解止呕3. 生姜半夏汤的功效是: E [1分]4. 半夏干姜散的功效是: D [1分]A.湿热蕴结下利便脓B.肠滑气利C.燥屎内结,热结旁流,下利D.虚寒下利便脓血E.实热下利5. 桃花汤主治:D [1分]6. 大承气汤主治:C [1分]A.小半夏汤B.半夏干姜散C.生姜半夏汤D.吴茱萸汤E.小半夏加茯苓汤7. “诸呕吐,谷不得下者”选用:A [1分]8. “干呕,吐逆,吐涎沫”选用:B [1分]A.越婢加半夏汤B.小青龙加石膏汤C.厚朴麻黄汤D.射干麻黄汤E.葶苈大枣泻肺汤9. “支饮不得息”治用:E [1分]10. “咳而脉浮者”治用:C [1分]A.脾胃湿热,熏蒸肝胆B.湿邪内阻,肾亦有热C.湿热郁脾,郁蒸血分D.嗜酒过度,湿热内蕴E.饮食不节,损伤脾胃11. 酒疸的病机是:D [1分]12. 谷疸的病机是:E [1分]A.半夏泻心汤B.小半夏汤C.半夏干姜散D.生姜半夏汤E.甘草泻心汤13. 狐惑病宜选方:E [1分]14. 呕而肠鸣,心下痞者宜选方:A [1分]A.养血开郁,清热除湿B.利水通窍,渗湿通阳C.化瘀利窍泄热D.化气利水,利小便E.利水清热滋阴15. 当归贝母苦参丸的功效是:A [1分]16. 葵子茯苓散的功效是:B [1分]A.旋复花汤B.胶艾汤C.桂枝茯苓丸D.温经汤E.胶姜汤17. 冲任虚寒,兼有瘀血所致的崩漏,宜用:D [1分]18. 癥病下血宜用:C [1分]A.阳旦汤B.小半夏汤C.干姜人参半夏丸D.下瘀血汤E.竹皮大丸19. 妇人乳中虚,烦乱呕逆,有热,宜用: E [1分]20. 妊娠呕吐不止,宜用: C [1分]A.半夏厚朴汤B.甘麦大枣汤C.小柴胡汤D.温经汤E.肾气丸21. 妇人转胞,脐下急痛,小便不利,宜选方:E [1分]22. 妇人热入血室,宜选方:C [1分]A.风水B.皮水C.正水D.石水E.黄汗23. 其脉自沉,外证腹满不喘是:D [1分]24. 其脉沉迟,外证自喘是:C [1分]A.虚劳黄疸B.湿重于热C.肠胃燥结D.邪在少阳E.热盛里实25. 猪膏发煎证的病机是:C [1分]26. 黄疸病,大黄硝石汤证,其病机是:E [1分]A.麻黄加术汤B.甘草附子汤C.防己黄芪汤D.白术附子汤E.麻杏苡甘汤27. 风湿,脉浮,身重,汗出,恶风者,治宜:C [1分]28. 濕家身煩疼,治宜:A [1分]A.妊娠血虚寒盛的腹痛B.妊娠冲任虚寒的腹痛C.妊娠肝脾不调的腹痛D.产后气血郁滞的腹痛E.产后血虚的腹痛29. 枳实芍药散主治的腹痛是哪一种:D [1分]30. 上列五种妇人腹痛,胶艾汤主治的是哪一种:B [1分]A.防己黄芪汤B.甘草附子汤C.麻杏苡甘汤D.白术附子汤E.麻黄加术汤31. 脉浮,身重,汗出,恶风者,治宜: A [1分]32. 湿家身烦疼,治宜:E [1分]A.越婢加半夏汤B.小青龙加石膏汤C.厚朴麻黄汤D.射干麻黄汤E.葶苈大枣泻肺汤33. “咳而上气,喉中水鸡声”治用:D [1分]34. “咳而脉浮者”治用:C [1分]A.侯氏黑散B.风引汤C.防己地黄汤D.续命汤E.头风摩散方35. 中风证见大风四肢烦重,心中恶寒不足宜用:A [1分]36. 中风证见血虚受风宜用:C [1分]A.心中痞,诸逆,心悬痛B.心下坚,大如盘C.上冲皮起,出见有头足D.其人常欲蹈其胸上E.小腹弦急,痛引脐中37. 肝着证见:D [1分]38. 气分病证见:B [1分]A.肾气丸B.薯蓣丸C.桂枝加龙骨牡蛎汤D.黄芪建中汤E.酸枣仁汤39. 虚劳腰痛,小便不利,少腹拘急者治用:A [1分]40. 虚劳里急,诸不足治用:D [1分]A.皮水挟热B.皮水无热C.皮水手足厥冷D.皮水四肢肿,四肢聂聂动者E.皮水一身面目黄肿,其脉沉,小便不利41. 防己茯苓汤可治:D [1分]42. 蒲灰散可治:E [1分]A.薏苡附子败酱散B.排脓散C.大黄甘遂汤D.王不留行散E.大黄牡丹汤43. 肠痈脓已成选方:A [1分]44. 肠痈脓未成选方:E [1分]A.胶姜汤B.温经汤C.桂枝茯苓丸D.旋复花汤E.胶艾汤45. 胞阻下血宜用:E [1分]46. 冲任虚寒兼有瘀血的崩漏宜用:B [1分]。
计算机文化基础第5次作业
一、重中之重复习如何设置隐藏文件夹,如何查看隐藏文件夹和文件的扩展名。
要求截屏。
[oeasy][操作系统]隐藏文件究竟是怎么一回事?[oeasy][操作系统]搜索文件属性编辑器二、开机声音DIY。
自己制作一个个性化的开机声音或者最大化,最小化的声音。
格式是WAV的,然后设置开机声音。
要求交wav文件,放到一个rar包里面。
使用的工具可以是audition.[oeasy][Vista]如何设置vista的声音如果要自己录制看这个audition三、自己画一个鼠标上次画的ico文件,但是很多同学没有做,这次做个鼠标吧,可以用自己的头像导入进来,然后再进行设置。
ftp://10.66.12.222/%C8%ED%BC%FE/%C6%BD%C3 %E6%C9%E8%BC%C6/icon/[oeasy][icon][1]如何使用iconcool制作图标和鼠标[oeasy][icon][2]怎么把鼠标指针DIY四、写出如何对抗U 盘病毒,简单一句话说明。
五、使用超级兔子或优化大师对系统进行整理ftp://10.66.12.222/%C8%ED%BC%FE/%CF%B5%CD%B 3%B9%A4%BE%DF/%CF%B5%CD%B3%D3%C5%BB%A F/六、切换用户和注销有什么区别?[oeasy][window]几种不同的关机方式接触一下注册表。
开始-运行-regedit,然后在找到HKEY_CURRENT_USER\Control Panel\International\ 在任务栏显示你爱人的名字,要求截屏。
[oeasy][OS]在系统里写下你心爱的人的名字...七、学习使用虚拟光驱。
先看视频教程。
然后下载使用。
ftp://10.66.12.222/%C8%ED%BC%FE/%D0%E9%C4%E 2%C9%E8%B1%B8/%D0%E9%C4%E2%B9%E2%C7%FD /alcolhol120%25/也可以用DaemonTools但是机房机器要求重启。
西南交大大学英语2第5次作业

本次作业是本门课程本学期的第5次作业,注释如下:大学英语II 第5单元作业题一、单项选择题(只有一个选项正确,共40道小题)1. –Oh, God! I’ve made such a mistake!–(A) Oh, nothing!(B) Never mind. We all make mistakes.(C) You should blame yourself.(D) Don’t worry.正确答案:B解答参考:[第五单元]B 当对方在你面前抱怨自己做错了事时,应进行实质性的安慰,而D 为敷衍性答复。
AC为非礼貌用语。
2. –What a poor job I’ve done!–(A) Do it again.(B) You can do it.(C) Do your best next time!(D) Don’t be upset. No one can do it better than you.正确答案:D解答参考:[第五单元]D 选项AC使上下文意思无法衔接,选项C含批评意。
3. –I had a minor accident yesterday but fortunately nothing is serious.–(A) What a relief to hear that!(B) I’m sorry to hear that.(C) What can I do for you?(D) Don’t worry.正确答案:A解答参考:[第五单元] A 上文提到遭遇小车祸但无大碍,这是不幸中的万幸,因此BD不恰当,C为商店服务用语。
4. –I feel awful. I’ve left your book somewhere.–(A) Oh! How could you do that!(B) Don’t worry. I never liked it anyway.(C) Cheer up. I’ll buy anthor one.(D) It’s not your fault.正确答案:B解答参考:[第五单元]B 当对方因事表示道歉时,应进行宽慰,而D则答非所问。
西南交大-铁路信号基础-第五次作业

本次作业是本门课程本学期的第5次作业,注释如下:请各位同学认真思考,按时完成作业。
一、单项选择题(只有一个选项正确,共3道小题)1. 站内一个轨道电路区段包含的单动道岔数目一般不要超过()(A) 2组(B) 3组(C) 4组(D) 5组正确答案:B解答参考:2. 站内一个轨道电路区段包含的双动道岔数目一般不要超过()(A) 1组(B) 2组(C) 3组(D) 4组正确答案:B解答参考:3. 轨道电路的标准分路灵敏度为()Ω。
(A) 0.02(B) 0.04(C) 0.06(D) 0.08正确答案:C解答参考:二、不定项选择题(有不定个选项正确,共3道小题)4. 轨道电路按照分割方式分类,可以分为()[不选全或者选错,不算完成](A) 计数电码式轨道电路(B) 有绝缘轨道电路(C) 无绝缘轨道电路(D) 道岔区段轨道电路正确答案:B C解答参考:5. 轨道电路的工作状态受()三种外界因素影响最大[不选全或者选错,不算完成](A) 电源电压(B) 道砟电阻(C) 钢轨阻抗(D) 分路电阻正确答案:A B C解答参考:6. 铁路信号按照接收信号的感官分类,可以分为()[不选全或者选错,不算完成](A) 固定信号(B) 视觉信号(C) 移动信号(D) 听觉信号正确答案:B D解答参考:(注意:若有主观题目,请按照题目,离线完成,完成后纸质上交学习中心,记录成绩。
在线只需提交客观题答案。
)三、主观题(共22道小题)7.我国常用的地面固定主体信号机有进站、出站、进路、调车、驼峰、遮断、防护。
8.固定信号按设置部位分类,可分为地面信号、机车信号。
9.铁路信号按信号的显示数目分类,可分为单显示、二显示、三显示和多显示。
10.固定信号按地位分类,可分为主体信号机、复位信号机11.列车从开始制动到完全停住这一段时间内所走行的距离,叫做制动距离。
12.铁路信号按接收信号的感官分类,可分为视觉信号、听觉信号13.铁路信号按禁止信号的显示意义分类,可分为绝对信号、容许信号14.机车信号分为接近连续式、连续式15.出站信号机有两个及以上的运行方向,而信号显示不能区分运行方向时,应在信号机上装设进路表示器。
离散数学第5次作业参考答案
离散数学第5次作业参考答案一、(每问5分,共10分)设S Q Q =⨯,Q 是有理数集,*为S 上的二元运算,,,,a b x y S ∀<><>∈有:,*,,a b x y ax ay b <><>=<+>(1) *运算在S 上是否可交换、可结合?是否为幂等? (2) *运算是否有单位元、零元?如果有,请指出,并求出S 中所有可逆元素的逆元。
. 解:(1) 因为,*,,a b x y ax ay b <><>=<+>, 而,*,,x y a b xa xb y <><>=<+>,所以,不具有交换律。
对任意的,,,,,a b x y w t S <><><>∈,有(,*,)*,,a b x y w t axw axt ay b <><><>=<++>,且 ,*(,*,),a b x y w t axw axt ay b <><><>=<++>。
因此,满足结合律。
因为2,*,,,a b a b a ab b a b <><>=<+>≠<>,所以不是幂等的。
(2)因为没有交换律,所以要求单位元,需要先求出左单位元,右单位元,当左单位元和右单位元相等的时候,那么就称为单位元。
零元也是一样,没有交换律,就要先求出左零元和右零元,如果左右零元相等,就叫做零元。
求零元:假设左零元为<a , b >.那么根据左零元的定义,对任意的,x y S <>∈,有,*,,,a b x y ax ay b a b ax a ay b b<><>=<+>=<>⇒=+=且,由于对任意的,x y <>都成立,所以左零元为0,,b b Q <>∈.但是,*0,0,x y b bx y <><>=<+>,对任意的,x y <>,显然0,0,bx y b <+>≠<>,因此,0,b <>不是右零元。
机电传动第五次作业
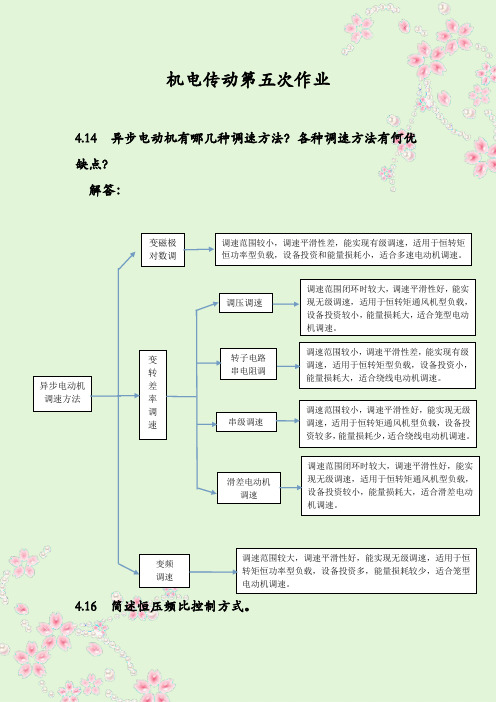
(2)异步电动机的工作原理: 而异步电动机的旋转磁场被转子导体切割,转子产生感
应电动势和感应电流,电流在磁场中产生电磁力和电磁转 矩,由此产生转速。 4.26 为什么可以利用同步电动机来提高电网的功率因数?
○3 基频以上恒压变频控制时异步电动机的机械特性。
解答:○1 恒压恒频正弦波供电时异步电动机的机械特性: 恒压恒频正弦波供电时异步电动机的机械特性相当于异步 电动机的固有机械特性,当 s 很小时,转矩近似与 s 成正比, 机械特性是一段直线,s 接近于 1 时转矩近似与 s 成反比, 这时,T = f(s)是对称于原点的一段双曲线。曲线图为:
机的全部磁动势都是有直流产生的,交流方面无需供给励磁 电流,这时的励磁状态称之为正常励磁。
当直流励磁电流 I f 大于正常励磁电流时的状态叫过励,
则直流励磁过剩,在交流方面不仅需要电源供给励磁电流, 而且还会向电网发出电感性电流与电感性无功功率,而这正 好补偿了电网附近电感性负载的需要,整个电网的功率因数 因此得到提高。
速,应该保持电压与频率之比为常数进行控制,以实现恒压
Hale Waihona Puke 频比控制。这种控制方式为恒压频比控制方式,又称恒磁通
控制方式。
4.17 简述异步电动机在下面三种不同的电压-频率协调控
制时的机械特性,并进行比较:
○1 恒压恒频正弦波供电时异步电动机的机械特性;
○2 基频以下电压-频率协调控制时异步电动机的机械特性;
n(S )
n0
恒压恒频机械特性
nm
0 (1)
Tst
Tm ax
T
○2 恒压频比控制的变频机械特性基频以下电压—频率协 调控制时异步电动机的机械特性:硬度也较好,当转矩增大 到最大值以后,转速再降低,特性就折回来了。基本上是平 行下移,而且频率越低时最大转矩值越小,能够满足一般的 调速要求,但低速带载能力有些差。在基频以下,磁通恒定 时转矩也恒定,属于“恒转矩调速”性质。曲线图为:
国际财务管理第5次作业(完成)
第四次作业一、简答题1.简述国际直接投资中进入国际市场的各种方式。
答:1)出口进入模式。
是指企业将其生产的产品出口到目标国家进行销售,通过产品出口占领国外市场。
2)契约进入模式,或者叫许可证交易,一般是发达国家将其版权、商标权、专利权或专有技术的使用权等无形资产让渡给输入国,并索取收益的一种方式。
这种模式除许可证以外,还有特许权专营等。
3)投资进入模式。
企业将其特有的资源,例如资本、技术、管理经验等综合的转移到国外,在国外建立生产型子公司。
2.影响债券价值的主要因素有哪些?2.答:影响债券价值的因素大致分为两类,一类是证券市场外的基本因素,是在长期趋势中能控制股票市场价格变动的潜在因素。
基本因素主要有:经济因素,政治因素,人为因素。
另一类是证券市场内的技术因素,是影响股票价格短期波动的因素。
这两类因素之间可能同方向作用于债券价格,也可能反方向作用于债券价格。
3.试述国际直接投资和国际间接投资的区别。
答:国际直接投资是指投资者在其所投资的企业中拥有足够的所有权或控制权的投资。
其特点在于对投入资本具有所有权和资本在使用过程中的经营权和决定权。
国际间接投资,是指投资者不直接掌握跨国公司的动产或不动产的所有权,活在投资对象中没有足够控制权的投资,具体表现为已购买外国公司的股票和其他有价证券以及中长期国际信贷为主要方式,取得股票或债息利息的活动,并主要在国际资本市场进行,因此也称为金融投资,其中以国际证券投资为主要对象。
4.国际证券投资的风险有哪些?答:1)经营风险。
是指发行证券的公司由于决策和管理人员在经营过程中发生的失误导致企业经营不善,从而使投资者蒙受损失的可能性。
2)市场风险。
是有证券市场行情变化所引起的风险。
3)违约风险。
由于在证券发行公司的财政状况不佳,不能按时支付债务本金和利息的可能性。
4)利率风险。
由于市场利率的变动,引起证券投资收益率变动的风险。
5)购买力风险。
由于通货膨胀的影响,使得证券投资收益率低于物价上涨水平,造成投资者实际投资收益率下降的可能性。
开放教育 继续教育第五次作业

在“幻灯片放映”中选择“动作按钮”,单击一种动作按钮弹出一个设置按钮大小的对话框设定大小
D、
以上操作都不正确
参考答案: C 展开解析
5(5分)、
0
如果要把一个剪辑输入到剪辑库,应该怎样操作( )
A、
直接用鼠标拖入剪辑库
B、
点击“插入影片”对话框中的“输入剪辑”按钮,在随即出现的对话框中找到要添加的剪辑,选择适当的文件名和文件类型,点击“输入”
参考答案: A 展开解析
8(5分)、
0
PowerPoint中,插入图片操作中,插入的图片必须满足一定的格式,下列选项中,不属于图片格式的后缀是( )
A、
bmp
B、
wmf
C、
jpg
D、
mps
参考答案: D 展开解析
9(5分)、
0
用内容提示向导来创建PowerPoint演示文稿时,演示文稿的标题填在( )
0
PowerPoint中,插入图片操作过程中,如果指定的插入图片的路径不对,会出现什么后果( )
A、
PowerPoint 程序将被关闭
B、
windows出现蓝屏现象并死机
C、
无法插入指定文件
D、
以上说法都不正确
参考答案: C 展开解析
2(5分)、
0
PowerPoint中,用“文本框”工具在幻灯片中添中文本时,如果想要是插入的文本框竖排,应该怎样( )
D、
工具
参考答案: B 展开解析
10(5分)、
0
如果要对一个动作按钮设定大小,该如何操作( )
高分子物理化学课程第五次作业含答案解析
高分子化学第5章作业(100分)1(简答题)请解释什么是本体聚合、溶液聚合、悬浮聚合、乳液聚合。
并简要说明以上四种方法的优缺点。
(10分)答案:本体聚合:不加其它介质,只有单体本身,在引发剂、热、光等作用下进行的聚合反应。
优点:(1)产品纯净,尤其适用于制透明板材、型材;(2)聚合设备相对简单,可连续生产。
缺点:(1)体系很粘;(2)聚合热不易扩散,反应难以控制,轻则造成局部过热(聚合物分子量分布变宽),重则聚合温度失调,引起爆聚;(3)产生凝胶效应,出现自动加速现象,更易使聚合反应失控。
溶液聚合:将单体和引发剂溶于适当的溶剂中,在溶液状态下进行的聚合反应。
优点:(1)聚合热易撤除,可避免局部过热;(2)体系粘度低,自动加速效应不明显;(3)反应物料易输送;(4)可直接制成聚合物溶液产品。
缺点:(1)单体被溶剂稀释,浓度低,聚合速率慢,设备利用率低;(2)单体浓度低和向溶剂链转移的双重结果,使聚合物分子量降低;(3)溶剂的分离回收成本高,且难以从聚合物中完全除去;(4)溶剂的使用易产生环境污染和安全问题。
悬浮聚合:将不溶于水的单体以小液滴状悬浮在水中聚合,这是自由基聚合特有的聚合方法。
优点:(1)体系粘度低,传热和温度容易控制,产品分子量及其分布比较稳定;(2)产品分子量比溶液聚合的高,杂质含量比乳液聚合的少;(3)后处理工序比乳液聚合和溶液聚合简单,生产成本也低,粒状树脂可直接成型。
缺点:(1)聚合产物中有较多量的分散剂,影响其性能;(2)难以实现连续化。
乳液聚合:在搅拌作用下,将单体在水中分散成乳状液,进而进行聚合反应。
优点:(1)水为分散介质(安全、环保、低黏),易撤热控温、易输送;(2)聚合速率快,产物分子量高;(3)可直接用于聚合物乳胶的场合。
缺点:(1)需要固体产品时,后处理(凝聚、洗涤、脱水、干燥)麻烦,成本较高;(2)难以除尽乳化剂残留物,有损电性能等。
2(简答题)悬浮聚合和乳液聚合配方体系中分别有哪些物质?它们的聚合场所分别是哪里?(10分)答案:悬浮聚合:配方—单体、水、油溶性引发剂、分散剂;聚合场所—分散的单体液滴。
国家开放大学 工程数学形考任务第五次作业
工程数学作业(第五次)(满分100分)第6章 统计推断(一)单项选择题(每小题2分,共6分) ⒈设是来自正态总体(均未知)的样本,则(A )是统计量. A.B.C. D.⒉设是来自正态总体(均未知)的样本,则统计量( D )不是的无偏估计. A.B.C. D.3.对正态总体方差的检验用的是(C ).(A) U 检验法 (B) T 检验法(C) 2χ检验法 (D) F 检验法(二)填空题(每小题2分,共14分)1.统计量就是 不含未知参数的样本的函数 .2.参数估计的两种方法是 点估计 和 区间估计 .常用的参数点估计有 矩估计法和 最大似然估计法 两种方法.3.比较估计量好坏的两个重要标准是 无偏性 , 有效性 . 4.设是来自正态总体(已知)的样本值,按给定的显著性水平检验,需选取统计量X U =5.假设检验中的显著性水平为 “弃真” 错误 发生的概率.6.当方差2σ已知时,检验0100μμμμ≠=:,:H H 所用的检验量是检验量t 。
7.若参数θ的估计量),,,(21n x x x ϕ满足 []θθ=)(nx x x E ,...,,ˆ21 ,则),,,(21n x x x ϕ称为θ的无偏估计。
(三)解答题(每小题10分,共80分)1.设对总体得到一个容量为10的样本值4.5, 2.0, 1.0, 1.5, 3.5, 4.5, 6.5,5.0, 3.5, 4.0试分别计算样本均值和样本方差.2.在测量物体的长度时,得到三个测量值:3.00 2.85 3.15若测量值,试求的最大似然估计值.3.设总体的概率密度函数为试分别用矩估计法和最大似然估计法估计参数.4.测两点之间的直线距离5次,测得距离的值为(单位:m):108.5 109.0 110.0 110.5 112.0测量值可以认为是服从正态分布的,求与的估计值.并在⑴;⑵未知的情况下,分别求的置信度为0.95的置信区间.5.测试某种材料的抗拉强度,任意抽取10根,计算所测数值的均值,得∑===10120101i i x x ∑==--=10122521101i i x x s .)(假设抗拉强度,试以95%的可靠性估计这批材料的抗拉强度的置信区间。
中小学数字资源应用第五次作业

中小学数字资源应用第五课作业1【单选题】《中国教育现代化2035》提出推进教育现代化的战略任务包括几项?A、8项B、9项C、10项D、11项2【单选题】智能环境助力课堂变革的逻辑,它包括四个方面,其中变革活动承担什么功能?A、虚实融合B、数据驱动C、多元特色D、弹性自调3【单选题】基于智能课堂的个性化自主学习模式中,包括学习活动,学习路径和技术支持三个环节,每个环节在不同的时期也各自的功能,其中在学习活动为学习自测功能时,学习路径此时的功能是?A、大数据分析B、学习方法推送C、个性化自主学习分析D、个性化自主巩固训练4【单选题】“创创用”,即():在数字教材的支持下,创新教与学模式,创造性地应用A、融合应用B、方便应用C、创新应用D、混合应用5【单选题】数字教材应用的教学效果评价要求从( ) 的视角出发。
A、教师B、学生C、教育管理者D、各教学主体6【单选题】在撰写方案,首先就是要确定选题,选题时要注意一定的原则,其中科学性原则的作用是?A、现实条件B、内在依据C、本质特征D、根本方向7【单选题】项目式学习主要是以_____为指导。
A.建构主义理论B、行为主义理论C、联通主义理论D、认知主义理论8【单选题】优质教育资源供给侧改革要从提高资源供给质量出发,增强数字教材资源的服务能力,建立以( ) 为中心的资源生态,在规模化应用的基础上凸显个性化服务特征。
A、质量B、服务C、师生D、环境9【多选题】课题选择要求人们考察和分析现有事实和理论:A、相互之间的矛盾B、各自内在矛盾C、与学生需要之间的矛盾D、与社会需要之间的矛盾10【多选题】数字教材创新课堂教学研究的课题可以从哪些方面切入:A、教育社会化实践和社会需要B、数字教材课堂教学运用的实践经验向理论的转换C、数字教材课堂教学运用的理论向应用实践的转换D、数字教材课堂教学运用的偶然发现E、课堂教学其他领域的启示与移植F、现有数字教材课堂教学运用理论的不足与缺陷11【多选题】课题选择的原则:A、需要性原则B、创造性原则C、科学性原则D、可行性原则12【多选题】智能课堂的主要特征包括哪些?A、重构教学体系B、创新教学理念C、重塑教学目标D、再造教学流程E、多维教学评价13【多选题】个性化自主学习分析环节,主要是在大数据技术支持下,对学生课前行为数据进行分析,发现学生_______等个体差异,总结学习问题。
第五次作业参考答案

度及 149Sm
中毒随时间变化(设
Sm a
48510b ,其它数据见题
4)。
解:由教材查得如下数据: Pm 0.0113, Pm 3.58106 s1 ,
栅元的裂变截面为 f
UO2 f
VUO2
V栅 6.6 0.3155 2.0823m1 ,
则停堆后149Pm , 149Sm 浓度及149Sm 中毒随时间变化为
堆的 相同,因此:
超f 热超热
N
超热 Xe
()
N
热 Xe
()
Xe
超热
Xe
超热
Xe
热
Xe 热
热f 热
Xe
超热
Xe 超热
Xe
热
Xe 热
2.09 105 31023 51017 2.09 1.5
1.7169
2.09 105 11027 11019 2.09 1103
在其他条件都相同的情况下(此处认为 f ,相同):
由N Xe () ( I Xe ) f
(Xe
Xe a
)得:N Xe,U 233 ()
N Xe,U 235 ()
N Xe,Pu239 ()
由NSm () Pm f
Sm a
得:NSm,U 233 ()
1
exp
3.58 106 t
0.00396 0.00113exp 1.2888102t (t单位h)
13、试比较在以铀-233、铀-235、钚-239 作为燃料的热中子反应堆中的平衡氙-135 和钐-149
第五次作业瞧他们来了(课件显示偏旁冫彳扌刂)谁认识他们呀?你是怎么..
第五次作业请点评下面的识字教学片段:师:同学们,现在有4个偏旁娃娃急着想与大家交朋友,你们愿意认识它们吗?瞧,他们来了(课件显示偏旁“冫”“彳”“扌”“刂”)谁认识他们呀?你是怎么认识的?生:老师,我认识“刂”旁,我记得您说过刀字在旁边叫立刀旁,与锋锐刀箭有关。
生:我认识“冫”旁。
三点水去掉一滴水,这一滴水可能是因为天气太冷了,结成冰了。
应该与水的温度有关。
生:老师,我想给小朋友介绍剩下的两个偏旁“扌”和“彳”旁。
“彳”旁表示有很多人,“扌”旁表示与手动作有关。
师:偏旁娃娃想与小朋友玩捉迷藏游戏,你们能从课文中找到他们藏在哪儿吗?生:老师,“刂”旁藏在“到”的右边,“秋天来到”的“到”。
生:“到”字读音与右边“刂”旁读音相似。
生:“冫”旁藏在“凉”字左边,“凉”快的“凉”。
生:两点水加“京”就是“凉”,凉风、凉气。
生:“彳”旁藏在“往”字左边,“向往”的“往”。
我很向往飞上月球拍照。
生:我听姥姥说,旧社会有很多地主欺负老百姓,“往”字边表示很多人,右边表示地主。
生:“排“字带“扌”旁,排队需要伸手,与手的动作有关。
生:老师,我还觉得右边像小朋友在排队,两竖是操场,两边是三横是三排小朋友。
我们海鹰小队可以演示这个“排“字。
生:我有好多办法记住“树”,“木”加“对”就是树,果树、桃树。
生:我还想到敌人“又”进“村”子里就是树,梨树。
生:“丛”去掉横就是“从”。
生:两个小人手牵手也是从。
生:小时候姥姥讲故事开头都是“从前啊……”。
生:“会”字我有好办法记住,上面是人,下面是云,就是开会的“会”,开会的人像天上的云那么多。
一、唤发情感,提供充足的空间。
情感是人们对客观事物在心理上及态度上产生的反应,积极的情感能够使语文课堂充满人文魅力。
这节课教师凭借色彩明亮的多媒体课件,充满童趣的语言,拉近了学生与教材间的距离,赋予词语生命力,唤起了学生主动识字的情感。
学生在这种情感的支配下,自主地识字,自主地交流合作,感受到识字的快乐和自己获取知识后的成功喜悦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五次课程作业
注:本次作业参考教材《机器人工程》第3章练习题P51页,练习题1,2,3,4
4.1通过把式(3.16)和式(3.21)分别进行拉普拉斯变换,推导公式(3.23)~(3.25)。
解:对式(3.16)和(3.21)用初始值0分别进行拉普拉斯变换,得到下式:
(Ms2+Ds)q m(s)=τm(s)(1)
τm(s)=K t
R
(νm(s)−K b sq m(s))(2)把式(2)代入到(1)中得,
(Ms2+Ds)q m(s)=K t
R
(νm(s)−K b sq m(s))
整理化简得
G(s)=q m(s)
v m(s)
=
K t
RMs2+(RD+K t K b)s
=
K t
(RD+K t K b)
⁄
s((RD+K
t
K b)
⁄s+1)
=
K
()
故
K=
K t
(RD+K t K b),T=
RM
(RD+K t K b)
4.2用题4.1的结果,推导出图3.11的方框图。
(3.16)
(3.21)
(3.23) (3.24),(3.25)
图3.11 考虑内部结构时的直流伺服电机的方框图
解:
由4.1题式(1
由式(
2)得方框图
连接方框图b 和a 即得到图3.11
图3.11 考虑内部结构时的直流伺服电机的方框图
4.3试对照图3.11的方框图,用表3.1的连接推导出图3.10的方框图。
图3.10 直流伺服电机的方框图
表3.1传递框图的连接
解:
先对红色方框内传递框图化简,由串联连接,传递函数相乘,得框图
再对蓝色框内的传递框图化简,由反馈连接,得
化简得
故得到图3.10形式的框图。
4.4在图3.24中G(s)=K/s(Ts+1)时,试将控制系统的闭环传递函数G C(s)= q m(s)/q md(s)表示为标准的三阶系统的传递函数H3(s)=ωs/(s3+ν2ωn s2+
ν1ωn2s+ωn3),并用K,T,ωn,ν1,ν2表示实现指定的ωn,ν1,ν2时的K I,K P,K D。
图3.24 I-PD控制
解:由图3.24的传递函数框图得到
q m(s)=νm(s)G(s)=K
s(Ts+1)
νm(s)(3)
νm(s)=K I
s
(q md(s)−q m(s))−(K p+K D s)q m(s)(4)把式(4)代入(3)得,
q m(s)=
K
s(Ts+1)
{
K I
s
(q md(s)−q m(s))−(K p+K D s)q m(s)}
化简整理得,标准形传递函数为
G C(s)(=q m(s)
q md(s)
)=
KK I/T
s3+{(1+KK D)/T}s2+(KK P/T)s+KK I/T
对比
H3(s)=ωs/(s3+ν2ωn s2+ν1ωn2s+ωn3)令对应项系数相等,得
ν2ωn=(1+KK D)/T
ν1ωn2=KK P/T
ωn3=KK I/T
解得,
K I=ωn3T K
K P=
ν1ωn2T
K D=ν2ωn T−1
K。