点的轨迹方程的求法共19页文档
求轨迹方程的常用方法(经典)
求轨迹方程的常用方法(一)求轨迹方程的一般方法:1. 待定系数法:如果动点P 的运动规律合乎我们已知的某种曲线(如圆、椭圆、双曲线、抛物线)的定义,则可先设出轨迹方程,再根据已知条件,待定方程中的常数,即可得到轨迹方程,也有人将此方法称为定义法。
2. 直译法:如果动点P 的运动规律是否合乎我们熟知的某些曲线的定义难以判断,但点P 满足的等量关系易于建立,则可以先表示出点P 所满足的几何上的等量关系,再用点P 的坐标(x ,y )表示该等量关系式,即可得到轨迹方程。
3. 参数法:如果采用直译法求轨迹方程难以奏效,则可寻求引发动点P 运动的某个几何量t ,以此量作为参变数,分别建立P 点坐标x ,y 与该参数t 的函数关系x =f (t ),y =g (t ),进而通过消参化为轨迹的普通方程F (x ,y )=0。
4. 代入法(相关点法):如果动点P 的运动是由另外某一点P'的运动引发的,而该点的运动规律已知,(该点坐标满足某已知曲线方程),则可以设出P (x ,y ),用(x ,y )表示出相关点P'的坐标,然后把P'的坐标代入已知曲线方程,即可得到动点P 的轨迹方程。
5.几何法:若所求的轨迹满足某些几何性质(如线段的垂直平分线,角平分线的性质等),可以用几何法,列出几何式,再代入点的坐标较简单。
6:交轨法:在求动点轨迹时,有时会出现要求两动曲线交点的轨迹问题,这灯问题通常通过解方程组得出交点(含参数)的坐标,再消去参数求得所求的轨迹方程(若能直接消去两方程的参数,也可直接消去参数得到轨迹方程),该法经常与参数法并用。
(二)求轨迹方程的注意事项:1. 求轨迹方程的关键是在纷繁复杂的运动变化中,发现动点P 的运动规律,即P 点满足的等量关系,因此要学会动中求静,变中求不变。
)()()(0)(.2为参数又可用参数方程表示程轨迹方程既可用普通方t t g y t f x ,y x ,F ⎩⎨⎧=== 来表示,若要判断轨迹方程表示何种曲线,则往往需将参数方程化为普通方程。
轨迹方程的求法 通用精品课件
以直线DC为x轴,线段DC的中点为原点建立直角坐标系。
设椭圆方程为 x 2
y2 +
= 1 (a>b>0)
则
a2 b2
|AD| + |AC| = 2a,|BD| + |BC| = 2a
所以,|AD| + |BD| + |AC| + |BC| = 4a 即 8 + 4 2 = 4a
例8. 等腰直角三角形ABC中,斜边BC
在已知曲线上运动,代入已知曲线得出M的方 程.M和P是什么关系?回到图中仔细分析,连 接AQ会怎么样?点M与Δ AFQ是什么关系?
xP
yP
1 3x 2
3y 2
本题答案: y2 8 (x 1). 33
轨迹为以(-1/3,0)顶点,开口向右的抛物线(除去顶点).
18.已知直线L1⊥直线L2,垂足为M,点N ∈L2,(如图)以A,B为端点 的曲线段C上任意一点到L1的距离与到N的距离相等.若ΔAMN 为锐角三角形,且|AM|=√17,|AN|=3,|BN|=6.建立适当的坐标系,
(A)圆 (B)双曲线 (C)椭圆 (D)抛物线
6.已知一曲线是与两个定点O(0,0)、A(3,0)距离的比为 1:2的点的轨迹,则此曲线的方程是__(x___1_)2___y_2 __4__.
x2 y2 1 (x 3)2 y2 2
平方化简得:(x 1)2 y2 4 (P78)
4.当所求动点的运动受一些几何量(距离、角度、 斜率、坐标等)制约时,可考虑用参数法求解.
5.求得的轨迹方程要与动点的轨迹一一对应,否则要 “多退少补”,多余的点要剔除,不足的点要补充.
第3讲轨迹方程的求法

第3讲轨迹方程的求法轨迹方程的求法是数学中的一个重要问题,它可以帮助我们描述和分析物体的运动轨迹。
在求解轨迹方程时,合理建立坐标系是非常重要的一步,它能够简化求解过程,并使问题更加清晰明了。
本文将为大家介绍合理建立坐标系的方法,并在此基础上讨论轨迹方程的求解方法。
在建立坐标系时,首先需要选择合适的原点和坐标轴。
原点通常是待求解问题中的一个参考点,可以选择为物体的起始点或者一些特定时刻的位置。
坐标轴的选择需要根据问题的特征来确定,一般可以选择和物体运动方向相关的轴。
例如,如果物体在水平面上运动,则可以选择水平方向为x轴,垂直方向为y轴。
如果物体在三维空间中运动,则可以选择三个相互垂直的坐标轴。
建立好坐标系后,下一步是确定坐标轴的正方向。
正方向的选择需要根据具体的问题来确定。
例如,在一维直线运动中,我们可以选择正方向为物体运动的方向;在二维平面运动中,我们可以选择正方向为与物体运动方向相同的方向。
选择了正方向后,我们需要给出相应的坐标增加的规则,通常可以选择物体运动方向为正方向时坐标增加,反方向为负方向时坐标减小。
这样我们就建立起了合理的坐标系。
接下来,我们进入轨迹方程的求解过程。
根据物体的运动特征,可以选择不同的方法来求解轨迹方程。
以下是两种常见的方法:1.参数方程法:如果我们已知物体的运动状态随时间的变化关系,则可以使用参数方程法来求解轨迹方程。
参数方程的形式为x=f(t),y=g(t),其中f(t)和g(t)分别表示物体在x轴和y轴上的坐标与时间t 的关系。
通过求解这两个方程,我们可以得到物体的轨迹方程。
2.隐式方程法:如果我们已知物体的运动状态与坐标x和y的关系,但无法表示为参数形式时,则可以使用隐式方程法来求解轨迹方程。
隐式方程的形式为F(x,y)=0,其中F(x,y)表示物体的运动状态与坐标x和y 的关系。
通过求解这个方程,我们可以得到物体的轨迹方程。
无论使用哪种方法,我们都需要根据问题的特征来选择合适的数学工具和求解方法。
求轨迹方程的方法

求轨迹方程的方法轨迹方程是描述物体在运动过程中所遵循的路径的数学表达式。
轨迹方程的求解方法因物体的运动方式而异。
下面将介绍几种常见的物体运动方式,并讨论如何求解它们的轨迹方程。
1.直线运动:物体在直线上做匀速或变速直线运动时,其轨迹方程为y = mx + b,其中m为斜率,b为截距。
若已知起始点的坐标和运动速度,则可以通过这些参数来确定轨迹方程。
2.曲线运动:物体在空间中做曲线运动时,其轨迹方程一般无法用简单的直线方程表示。
这时需要通过其他方法来求解轨迹方程。
以下是几种常见的曲线运动例子:-圆周运动:若物体做匀速圆周运动,其轨迹方程可以用参数方程表示:x = r * cos(θ),y = r * sin(θ),其中r为圆的半径,θ为角度。
通过改变θ的取值范围,可以得到整个圆周的轨迹方程。
-椭圆运动:椭圆运动可以用参数方程表示:x = a * cos(θ),y = b * sin(θ),其中a和b分别为椭圆长轴和短轴的长度。
同样通过改变θ的取值范围,可以得到整个椭圆的轨迹方程。
-抛物线运动:物体做匀速或变速抛物线运动时,其轨迹方程可以用解析几何中的一般二次方程表示:y = ax^2 + bx + c,其中a、b和c为常数。
通过给定的起始点和速度,可以确定这些常数,从而求解轨迹方程。
-双曲线运动:物体做匀速或变速双曲线运动时,其轨迹方程可以用参数方程表示:x = a * sec(θ),y = b * tan(θ),其中a和b为常数。
同样通过改变θ的取值范围,可以得到整个双曲线的轨迹方程。
除了上述运动方式外,还存在许多其他复杂的运动形式,例如螺线、摆线等。
对于这些运动形式,求解轨迹方程的方法往往需要借助更高级的数学工具,如极坐标、参数方程、微分方程等。
总结起来,轨迹方程的求解方法因物体的运动方式而异。
对于直线运动,可以直接得到轨迹方程;对于曲线运动,常常需要借助参数方程、解析几何等数学工具来求解。
对于更加复杂的运动形式,可能需要借用更高级的数学方法来确定轨迹方程。
名师指导直接法、定义法、相关点法求轨迹方程!.doc

名师指导直接法、定义法、相关点法求轨迹方程!本内容主要研究直接法求轨迹方程.根据已知条件及一些基本公式如两点间距离公式,点到直线的距离公式,直线的斜率公式等,直接列出动点满足的等量关系式,将关系式坐标化,从而求得轨迹方程。
归纳整理:当所求动点的要满足的条件简单明确时,直接按“建系设点、列出条件、代入坐标、整理化简、限制说明”五个基本步骤求轨迹方程, 称之直接法.总结:1.用直接法求轨迹方程的步骤:建系,设点,列方程化简,其关键是根据条件建立x,y之间的关系F(x,y)=0.2.求轨迹方程时,最后要注意它的完备性与纯粹性,多余的点要去掉,遗漏的点要补上.本内容主要研究定义法求轨迹方程.通过图形的几何性质判断动点的轨迹是何种图形,再求其轨迹方程,这种方法叫做定义法.运用定义法,求其轨迹,一要熟练掌握常用轨迹的定义,如线段的垂直平分线,圆、椭圆、双曲线、抛物线等,二是用待定系数法求出轨迹的方程,这样可以减少运算量,提高解题速度与质量.整理:熟悉一些基本曲线的定义是用定义法求曲线方程的关键.圆:到定点的距离等于定长椭圆:到两定点的距离之和为常数(大于两定点的距离)双曲线:到两定点距离之差的绝对值为常数(小于两定点的距离)抛物线:到定点与定直线距离相等.总结:1.用定义法求轨迹方程.熟练掌握常用轨迹的定义,如线段的垂直平分线,圆、椭圆、双曲线、抛物线等,例如圆到定点的距离等于定长,椭圆到两定点的距离之和为常数(大于两定点的距离),双曲线到两定点距离之差的绝对值为常数(小于两定点的距离),抛物线到定点与定直线距离相等.2.求曲线的轨迹方程时,应尽量地利用几何条件探求轨迹的曲线类型,从而再用待定系数法求出轨迹的方程,这样可以减少运算量.本内容主要研究相关点法求轨迹方程.当题目中的条件同时具有以下特征时,一般可以用相关点法求其轨迹方程:某个动点P在已知方程的曲线上移动;另一个动点M随P的变化而变化;在变化过程中P和M满足一定的规律. 相关点法的关键在于找到动点和其相关点坐标间的等量关系.。
轨迹方程的求法

轨迹方程的求法一、直接法求轨迹方程的一般步骤:“建、设、限、代、化” 1、建立恰当的坐标系; 2、设动点坐标(),x y ;3、限制条件列出来(如一些几何等量关系);4、代入:用坐标代换条件,得到方程(),0f x y =;5、化简(最后要剔除不符合条件的点).例1、过点()2,4P 作两条互相垂直的直线1l 、2l ,1l 交x 轴于A 点,2l 交y 轴于B 点,求线段AB 的中点M 的轨迹方程.巩固训练1:平面内动点M 与两定点()1,0A -、()2,0B 构成MAB ∆,且2MBA MAB ∠=∠,求动点M 的轨迹方程.巩固训练2:已知点A 、B 的坐标分别为()5,0-、()5,0,直线AM 、BM 相交于点M ,且它们的斜率之积是49-,求点M 的轨迹方程.巩固训练3:已知直角坐标平面上的点()2,0Q 和圆221C x y +=:,动点M 到圆C 的切线长与MQ 的比等于常数(0)λλ>,求动点M 的轨迹方程.二、定义法:如果动点的轨迹满足某已知曲线的定义,则可以依据定义求出轨迹方程.如圆、椭圆、双曲线、抛物线等. 规律可寻:(1)利用定义法求轨迹方程时,还要看所求轨迹是否是完整的圆、椭圆、双曲线、抛物线,如果不是完整的曲线,则应对其中的变量x 或y 进行限制.例2、(1)求与圆221:(3)1C x y ++=外切,且与222:(3)81C x y -+=内切的动圆圆心P 的轨迹方程.(2)已知圆221:(3)1C x y ++=和圆222:(3)9C x y -+=,动圆M 同时与圆1C 及圆2C 相外切,求动圆圆心M 的轨迹方程.巩固训练1:已知1,02A ⎛⎫- ⎪⎝⎭,B 是圆221:42F x y ⎛⎫-+= ⎪⎝⎭(F 为圆心)上一动点,线段AB 的垂直平方线交BF 于点P ,求点P 的轨迹方程.巩固训练2:已知1,02A ⎛⎫- ⎪⎝⎭,B 是圆2211:24F x y ⎛⎫-+= ⎪⎝⎭(F 为圆心)上一动点,线段AB 的垂直平方线交BF 于点P ,求点P 的轨迹方程.巩固训练3:在平面直角坐标系xOy 中,点M 到点()1,0F 的距离比它到y 轴的距离多1,求点M 的轨迹方程.巩固训练4:已知点1F 、2F 分别是椭圆22:171617C x y +=的两个焦点,直线1l 过点2F 且垂直于椭圆长轴,动直线2l 垂直1l 于点G ,线段1GF 的垂直平分线交2l 于点H ,求点H 的轨迹方程.巩固训练5:在极坐标系Ox 中,直线l 的极坐标方程为sin 2ρθ=,点M 是直线l 上任意一点,点P 在射线OM 上,且满足4OP OM ⋅=,记点P 的轨迹方程为C ,求曲线C 的极坐标方程.三、相关点法:有些问题中,其动点满足的条件不便用等式列出,但动点是随着另一动点(称之为相关点)而运动的,如果相关点所满足的条件是明显的,这时我们可以用动点坐标表示相关点坐标,根据相关点所满足的方程即可求得动点的轨迹方程. “相关点法”的基本步骤:(1)设点:设被动点的坐标为(),x y ,主动点的坐标为()00,x y ;(2)求关系式:求出两个动点坐标之间的关系式()()00,,x f x y y g x y =⎧⎪⎨=⎪⎩; (3)代换:将上述关系式代入已知曲线方程,便可得到所求动点的轨迹方程.例3、已知点P 是圆22:4C x y +=上任意一点,过点P 作x 轴的垂线段PD ,D 为垂足,当点P 在圆上运动时,求线段PD 的中点M 的轨迹方程.巩固训练1:已知在ABC ∆中,()2,0A -,()0,2B -,第三个顶点C 在曲线231y x =-上动点,求ABC ∆的重心的轨迹方程.巩固训练2:已知点P 是圆22:25C x y +=上任意一点,点D 是点P 在x 轴上的投影,点M 为PD 上一点,且满足45MD PD =,当点P 在圆上运动时,求点M 的轨迹方程.四、参数法:如果动点(),P x y 的坐标之间的关系不容易找,可以考虑将,x y 用一个或几个参数表示,最后消参数,得出,x y 之间的关系式,即轨迹方程.常用参数有角度θ、直线的斜率、点的横、纵坐标,线段的长度等.例4、过抛物线24y x =的顶点O 引两条互相垂直的直线分别与抛物线相交于,A B 两点,求线段AB 的中点P 的轨迹方程.巩固训练1:设椭圆方程为2214y x +=,过点()0,1M 的直线l 交椭圆于,A B ,O 是坐标原点,直线l 的动点P 满足()12OP OA OB =+,当直线l 绕点M 旋转时,求点P 的轨迹方程.五、交轨法:写出动点所满足的两个轨迹方程后,组成方程组分别求出,x y ,再消去参数,即可求解,这种方法一般适合于求两条动直线交点的轨迹方程.例5、设1A 、2A 是椭圆22195x y +=的长轴的两端点,1P 、2P 是垂直于12A A 的弦的端点,求直线11A P 与22A P 的交点的轨迹方程.巩固训练1:已知双曲线2212x y -=的左、右顶点分别为1A 、2A ,点()11,P x y 、()11,Q x y -是双曲线上不同的两个动点,求直线1A P 与2A Q 的交点的轨迹E 的方程.。
求点的轨迹方程常用方法

求点的轨迹方程的常用方法一.直接法.1.设点()()1,0,1,0A B -,直线,AM BM 相交于点,M 且它们的斜率之积为2,求点M 轨迹方程.2.已知动点(),Px y 与定点()4,0F 的距离和它到直线25:4l x =的距离的比是常数45,求点P 轨迹方程.二.定义法3.y 轴及y 轴右侧的点M 到点()1,0F 的距离比它到y 轴的距离大1,求点M 轨迹方程.4. 已知动圆M 过定点()4,0P-,且与圆22:80C x y x +-=相切,求动圆圆心M 的轨迹方程.5.已知椭圆2214x y +=的左、右焦点12,;F F P 是椭圆上一个动点,如果延长1F P 到Q ,使2,PQ PF =那么动点Q 的轨迹方程.6. 已知ABC ∆的顶点()()4,0,4,0,A B -C 为动点,且满足5sin sin sin ,4B A C +=求顶点C 轨迹方程.三.相关点法(代入法)7.已知点()4,0D,在圆224x y +=上任取一点P ,求线段PD 的中点M 的轨迹方程.8.在圆224x y +=上任取一点P ,过点P 做x 轴的垂线段PD ,D 为垂足,当点M 在DP 的延长线上,且3,2DM DP =当点P 在圆上运动时,求点M 的轨迹方程.9.已知椭圆2214x y +=的焦点12,;F F P 是椭圆上一个动点,12F PF ∠的外角平分线,l 点2F 关于直线l 的对称点为Q ,2F Q 交l 于点,R 求动点R 的轨迹方程.四.参数法10.已知动圆222:42640,Mx y bx by b ++-+-=求动圆圆心M 的轨迹方程.11.已知动圆22:6cos 4sin 0,Mx y x y ββ++-=求动圆圆心M 的轨迹方程.高考实战(2013年)1.已知动圆P 与圆()22:11Mx y ++=外切,且与圆()22:19N x y -+=相内切,求动圆圆心P 的轨迹方程.(2014年)2.已知点()2,2P ,圆22:80C x y y +-=,过点P 的动直线l 与圆C 交于,A B ,求线段AB 的中点M 的轨迹方程.(2017年)3.在椭圆22:12x C y +=上任取一点M ,过点M 做x 轴的垂线段MN ,N 为垂足,点P 满足2,NPNM =求点P 的轨迹方程.(2013年)4.在平面直角坐标系xoy 中,已知圆P 在x 轴上,截得线段长为P 在y 轴上,截得线段长为求点P 的轨迹方程.参考答案; 1. ()22102y x y -=≠ 2. 221259x y += 3. 24y x =4. 221412x y -=5. (2216x y ++=6. ()2210259x y y +=≠ 7. ()2221x y -+= 8. ()221049x y y +=≠ 9. ()2240x y y +=≠ 10. ()2044x y x +=-<< 11.22194x y += 1. ()221243x y x +=≠- 2. ()()22132x y -+-= 3. 222x y += 4. 221y x -=。
点的轨迹方程的求法

2x 4 2y 3
①
2
因为点A (x0 , y0 ) 在圆 (x 1)2 y2 4 上运动
(x0 1)2 y02 4
②
将①代入②中,得 (2x 4 1)2 (2 y 3)2 4
化简,得 (x 3)2 ( y 3)2 1
2
2
所以点M的轨迹是以 (3 , 3) 为圆心,半径长是1的圆
一、求动点的轨迹方程的常用方法
1、直接法
第2页/共13页
1. 已知点M与两个定点O(0,0) 、A(3,0)
距离的比为
1 2
求点M的轨迹方程,说明它是什么图形
解:设点M的坐标是 (x, y)
由题意得 MO 1 MA 2
即
x2 y2 1
(x 3)2 y2 2
两边平方,得
x2 y2 1
化简,得
第6页/共13页
4、已知线段AB的端点B的坐标 是(4,3),端点A在圆 (x 1)2 y2 4 上运动,求线段AB的中点M的轨 迹方程,并说明轨迹的形状
图像
第7页/共13页
解:设点M的坐标是(x, y)
点A的坐标是(x0 , y0 )
因
y
y0
3
x0 y0
2第82页/共13页
【小结】 求一个随着已知曲线上的动点而动的点的 轨迹方程用的方法叫 相关点法
第9页/共13页
求动点的轨迹方程的常用方法
1、直接法: 2、相关点法 (也称坐标转移法): 所求动点M
的运动依赖于一已知曲线上的一个动点M0的 运动,将M0的坐标用M的坐标表示,代入已知 曲线,所得的方程即为所求.
(x 3)2 y2 4
x2 y2 2x 3 0 即(x 1)2 y2 4
轨迹方程的求法

求轨迹方程的常用方法(一)求轨迹方程的一般方法:1. 定义法(待定系数法):如果动点P的运动规律合乎我们已知的某种曲线(如圆、椭圆、双曲线、抛物线)的定义,则可先设出轨迹方程,再根据已知条件,待定方程中的常数,即可得到轨迹方程。
此方法又称为待定系数法。
2. 直译法:如果动点P的运动规律是否合乎我们熟知的某些曲线的定义难以判断,但点P满足的等量关系易于建立,则可以先表示出点P所满足的几何上的等量关系,再用点P的坐标(x,y)表示该等量关系式,即可得到轨迹方程。
3. 参数法:如果采用直译法求轨迹方程难以奏效,则可寻求引发动点P运动的某个几何量t,以此量作为参变数,分别建立P点坐标x,y与该参数t的函数关系x=f(t),y=g(t),进而通过消参化为轨迹的普通方程F(x,y)=0。
4. 代入法(相关点法):如果动点P的运动是由另外某一点P'的运动引发的,而该点的运动规律已知,(该点坐标满足某已知曲线方程),则可以设出P(x,y),用(x,y)表示出相关点P'的坐标,然后把P'的坐标代入已知曲线方程,即可得到动点P的轨迹方程。
5:交轨法:在求动点轨迹时,有时会出现要求两动曲线交点的轨迹问题,这种问题通常通过解方程组得出交点(含参数)的坐标,再消去参数求得所求的轨迹方程(若能直接消去两方程的参数,也可直接消去参数得到轨迹方程),该法经常与参数法并用。
6.几何法:若所求的轨迹满足某些几何性质(如线段的垂直平分线,角平分线的性质等),可以用几何法,列出几何式,再代入点的坐标较简单。
(二)求轨迹方程的注意事项:1. 求轨迹方程的关键是在纷繁复杂的运动变化中,发现动点P的运动规律,即P点满足的等量关系,因此要学会动中求静,变中求不变。
)()()(0)(.2为参数又可用参数方程表示程轨迹方程既可用普通方t t g y t f x ,y x ,F ⎩⎨⎧=== 来表示,若要判断轨迹方程表示何种曲线,则往往需将参数方程化为普通方程。
求点轨迹方程的方法

求点轨迹方程的方法(1)直接法:从条件中直接寻找到,x y 的关系,列出方程后化简即可(2)代入法(相关点法):所求点(),P x y 与某已知曲线()00,0F x y =上一点()00,Q x y 存在某种关系,则可根据条件用,x y 表示出00,x y ,然后代入到Q 所在曲线方程中,即可得到关于,x y 的方程(3)定义法:从条件中能够判断出点的轨迹为学过的图形,则可先判定轨迹形状,再通过确定相关曲线的要素,求出曲线方程。
常见的曲线特征及要素有:①圆:平面上到定点的距离等于定长的点的轨迹直角→圆:若AB AC ⊥,则A 点在以BC 为直径的圆上确定方程的要素:圆心坐标(),a b ,半径r②椭圆:平面上到两个定点的距离之和为常数(常数大于定点距离)的点的轨迹确定方程的要素:距离和2a ,定点距离2c③双曲线:平面上到两个定点的距离之差的绝对值为常数(小于定点距离)的点的轨迹注:若只是到两定点的距离差为常数(小于定点距离),则为双曲线的一支确定方程的要素:距离差的绝对值2a ,定点距离2c④抛物线:平面上到一定点的距离与到一定直线的距离(定点在定直线外)相等的点的轨迹确定方程的要素:焦准距:p 。
若曲线位置位于标准位置(即标准方程的曲线),则通过准线方程或焦点坐标也可确定方程(4)参数法:从条件中无法直接找到,x y 的联系,但可通过一辅助变量k ,分别找到,x y与k 的联系,从而得到,x y 和k 的方程:()()x f k y g k =⎧⎪⎨=⎪⎩,即曲线的参数方程,消去参数k 后即可得到轨迹方程。
【题型一】直接法求轨迹【典例分析】设点(A,B ,M 为动点,已知直线AM 与直线BM 的斜率之积为定值13,点M 的轨迹是()A .()22109x y y -=≠B .()22109y x y -=≠C .()22103x y y -=≠D .()22103y x y -=≠【详解】解:设动点(),M x y,则x ≠,则MA k =MB k =,(x ≠,直线AM 与直线BM 的斜率之积为定值13,13=,化简可得,()22103x y y -=≠,故点M 的轨迹方程为()22103x y y -=≠.故选:C.例1:设一动点P 到直线:3l x =的距离到它到点()1,0A的距离之比为3,则动点P 的轨迹方程是()A.22132x y +=B.22132x y -= C.()224136x y --= D.22123x y +=解:设(),P x y33P ld PA-∴=33x ∴-=()()222331x x y ⇒-=-+2221626x x y ⇒--=-()()22224246136x y x y -⇒--=⇒-=答案:C 【变式演练】1.若两定点A ,B 的距离为3,动点M 满足2MA MB =,则M 点的轨迹围成区域的面积为()A .πB .2πC .3πD .4π【答案】D 【详解】以点A 为坐标原点,射线AB 为x 轴的非负半轴建立直角坐标系,如图,设点(,)Mx y=22(4)4x y -+=,于是得点M 的轨迹是以点(4,0)为圆心,2为半径的圆,其面积为4π,所以M 点的轨迹围成区域的面积为4π.2.已知点(0,1)F ,直线:1l y =-,P 为平面上的动点,过点P 作直线l 的垂线,垂足为Q ,且QP QF FP PQ ⋅=⋅,则动点P 的轨迹C 的方程为()A .24x y=B .23y x=C .22x y=D .24y x=【答案】A 【详解】设点(,)P x y ,则(,1)Q x -,因为(0,1)F 且QP QF FP PQ ⋅=⋅,所以(0,1)(,2)(,1)(,2)y x x y x +⋅-=-⋅-,即22(1)2(1)y x y +=--,整理得24x y =,所以动点P 的轨迹C 的方程为24x y =.故选:A 3.已知M (4,0),N (1,0),若动点P 满足MN →·MP →=6|NP →|.(1)求动点P 的轨迹C 的方程;解(1)设动点P (x ,y ),则MP →=(x -4,y ),MN →=(-3,0),PN →=(1-x ,-y ),由已知得-3(x -4)=6(1-x )2+(-y )2,化简得3x 2+4y 2=12,即x 24+y 23=1.∴点P 的轨迹方程是椭圆C :x 24+y 23=1.【题型二】相关点代入法【典例分析】已知△ABC 的顶点(30)(10)B C -,,,,顶点A 在抛物线2y x =上运动,求ABC △的重心G 的轨迹方程.【解析】解:设()G x y ,,00()A x y ,,由重心公式,得003133x x y y -++⎧=⎪⎪⎨⎪=⎪⎩,,00323x x y y =+⎧⎨=⎩, ①∴. ② 又00()A x y ,∵在抛物线2y x =上,200y x =∴.③将①,②代入③,得23(32)(0)y x y =+≠,即所求曲线方程是2434(0)3y x x y =++≠.例3:已知F 是抛物线24x y =的焦点,P 是该抛物线上的动点,则线段PF 中点M 的轨迹方程是()A.212x y =-B.21216x y =-C.222x y =- D.221x y =-思路:依题意可得()0,1F ,(),M x y ,()00,P x y ,则有0000221212x x x x y y y y ⎧=⎪=⎧⎪⇒⎨⎨+=-⎩⎪=⎪⎩,因为()00,P x y 自身有轨迹方程,为:204x y =,将00221x xy y =⎧⎨=-⎩代入可得关于,x y 的方程,即M 的轨迹方程:()()22242121x y x y =-⇒=-答案:D例4:已知F 是抛物线24y x =上的焦点,P 是抛物线上的一个动点,若动点M 满足2FP FM =,则M 的轨迹方程是__________解:由抛物线24y x =可得:()1,0F 设()()00,,,M x y P x y ()()001,,1,FP x y FM x y ∴=-=-2FP FM = ()00002112122x x x x y y y y =--=-⎧⎧∴⇒⎨⎨==⎩⎩①P 在24y x =上2004y x ∴=,将①代入可得:()()22421y x =-,即221y x =-【变式演练】1.已知抛物线24C y x =:的焦点为F .(1)点 A P 、满足2AP FA =-.当点A 在抛物线C 上运动时,求动点P 的轨迹方程;【答案】(1)设动点P 的坐标为( )x y ,,点A 的坐标为( )A A x y ,,则( )A A AP x x y y =--,,因为F 的坐标为(1 0),,所以(1 )A A FA x y =-,,由2AP FA =- 得( )2(1 )A A A A x x y y x y --=--,,.即2(1)2A A A Ax x x y y y -=--⎧⎨-=-⎩解得2A A x x y y=-⎧⎨=-⎩代入24y x =,得到动点P 的轨迹方程为284y x =-.2.已知圆()2221:0C x y r r +=>与直线01:2l y x =+相切,点A 为圆1C 上一动点,AN x ⊥轴于点N ,且动点M满足()22OM AM ON +=-,设动点M 的轨迹为曲线C .(1)求动点M 的轨迹曲线C 的方程;【答案】(1)试题解析:(I)设动点,由于轴于点又圆与直线即相切,∴圆由题意,,得即将代入,得曲线的方程为3.设F (1,0),M 点在x 轴上,P 点在y 轴上,且MN →=2MP →,PM →⊥PF →,当点P 在y 轴上运动时,求点N 的轨迹方程.【解析】解设M (x 0,0),P (0,y 0),N (x ,y ),∵PM →⊥PF →,PM →=(x 0,-y 0),PF →=(1,-y 0),∴(x 0,-y 0)·(1,-y 0)=0,∴x 0+y 20=0.由MN →=2MP →得(x -x 0,y )=2(-x 0,y 0),-x 0=-2x 0=2y 0,0=-x 0=12y.∴-x +y 24=0,即y 2=4x .故所求的点N 的轨迹方程是y 2=4x .【题型三】定义法【典例分析】已知动圆M 过定点(4,0)P -,且与圆2280C x y x +-=:相外切,求动圆圆心M 的轨迹方程.【解析】依题意,4MC MP -=,说明点M 到定点C P 、的距离的差为定值,∴动点M 的轨迹是双曲线的一支,∵24a =,∴2a =.∵4c =,∴22212b c a =-=∴动圆圆心M 的轨迹方程是221(2)412x y x -=≤-.例6:若动圆过定点()3,0A -且和定圆()22:34C x y -+=外切,则动圆圆心P 的轨迹方程是___________思路:定圆的圆心为()3,0C ,观察到恰好与()3,0A -关于原点对称,所以考虑P 点轨迹是否为椭圆或双曲线,设动圆P 的半径为r ,则有PA r =,由两圆外切可得2PC r =+,所以2PC PA -=,即距离差为定值,所以判断出P 的轨迹为双曲线的左支,则1,3a c ==,解得2228b c a =-=,所以轨迹方程为()22118y x x -=≤-【变式演练】已知两个定圆O1:(x+2)2+y 2=1:和O 2(x-2)2+y 2=4,它们的半径分别是1和2,.动圆M 与圆O 1内切,又与圆O 2外切,求动圆圆心M 的轨迹方程,【解析】解由|O1O2|=4,得O1(-2,0)、O2(2,0).设动圆M 的半径为r,则由动圆M 与圆O1内切,有|MO1|=r-1;由动圆M 与圆O2外切,有|MO2|=r+2.∴|MO2|-|MO1|=3.∴点M 的轨迹是以O1、O2为焦点,实轴长为3的双曲线的左支.∴a=32,c=2,∴b2=c2-a2=74.∴点M 的轨迹方程为4x29-4y27=1(x≤-32).2、已知点⎪⎭⎫⎝⎛0,41F ,直线41:-=x l ,点B 是直线l 上动点,若过B 垂直于y 轴的直线与线段BF 的垂直平分线交于点M ,则点M 的轨迹是()A 、双曲线B 、抛物线C 、椭圆D 、圆【答案】B【解析】由题意知MF MB =,点M 的轨迹为抛物线。
点的轨迹方程的求法优选PPT
[思路分析].
C y B
x A
本题答案:x2 +y2 =5
例4:抛物线y2 =4x的焦点为F,准线与 x轴交于A,P是抛物线上除去 顶点外的动点,O为顶点.连接FP并延长至Q,使|FP| = |PQ|,OQ与AP 交于M,求点M的轨迹.
[思路分析1]本题中的动点M是由两条动 y
Q
直线相交而得,而它们的运动又都依赖 于动点P ,因此选择P的坐标为参数,写
• 参数法:动点的运动依赖于某一参数(角度、 斜率、坐标等)的变化,可建立相应的参数 方程,再化为普通方程.
设[思出路B分(-析1,t]):,首C(先x,建y)的立坐适标当,的有坐以标下系思,路设:出动点A及定点B、C的坐标,如何将tgB、tgC坐标化是本题的关键.
平分线为y轴.(哪一种更好呢?)由 M 由下图面易 的知关∠键B是是求直出线pA的B值的,倾而斜ΔA角M,∠NC为是锐直角线三A角C形的及倾|斜BN角|=的6又补起角什,因么而作tg用B、呢t?g请C都大可家以认用真斜思率考来. 表示.
数学高考专题复习
圆锥曲线回顾
例1:已知ΔABC底边BC的长为2a(a>0),又知tgBtgC=t(t≠0).(a,t均为常 数).求顶点A的轨迹.
[思路分析]:首先建立适当的坐标系,设出
y A
动点A及定点B、C的坐标,如何将tgB、
tgC坐标化是本题的关键.由图易知∠B 是直线AB的倾斜角,∠C是直线AC的倾斜
1 本题答案:x轨2迹+y方2程=5为 x2/a2 +y2/ta2 =1 (x≠+-a)
标准方程y =2px(p>0).下面的关键 2 由图易知∠B是直线AB的倾斜角,∠C是直线AC的倾斜角的补角,因而tgB、tgC都可以用斜率来表示.
轨迹方程求轨迹方程的的基本方法
轨迹方程求轨迹方程的的基本方法:直接法、定义法、相关点法、参数法、交轨法、向量法等。
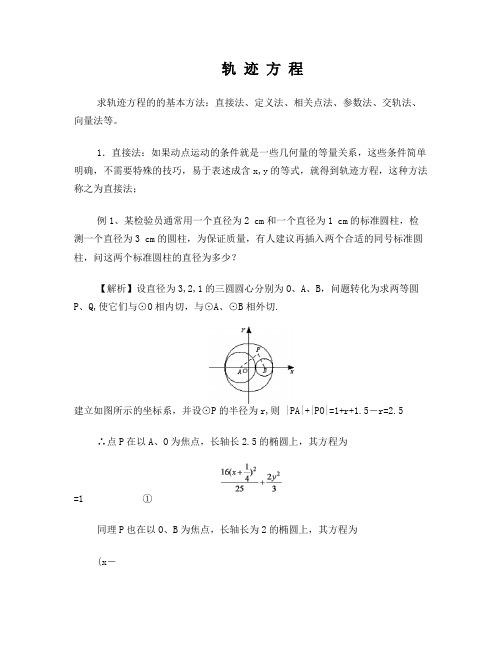
1.直接法:如果动点运动的条件就是一些几何量的等量关系,这些条件简单明确,不需要特殊的技巧,易于表述成含x,y的等式,就得到轨迹方程,这种方法称之为直接法;例1、某检验员通常用一个直径为2 cm和一个直径为1 cm的标准圆柱,检测一个直径为3 cm的圆柱,为保证质量,有人建议再插入两个合适的同号标准圆柱,问这两个标准圆柱的直径为多少?【解析】设直径为3,2,1的三圆圆心分别为O、A、B,问题转化为求两等圆P、Q,使它们与⊙O相内切,与⊙A、⊙B相外切.建立如图所示的坐标系,并设⊙P的半径为r,则 |PA|+|PO|=1+r+1.5-r=2.5∴点P在以A、O为焦点,长轴长2.5的椭圆上,其方程为=1 ①同理P也在以O、B为焦点,长轴长为2的椭圆上,其方程为(x-)2+y2=1 ②由①、②可解得,∴r=故所求圆柱的直径为cm.◎◎双曲线的两焦点分别是、,其中是抛物线的焦点,两点A(-3,2)、B(1,2)都在该双曲线上.(1)求点的坐标;(2)求点的轨迹方程,并指出其轨迹表示的曲线.【解析】(1)由得,焦点(-1,0).(2)因为A、B在双曲线上,所以,.①若,则,点的轨迹是线段AB的垂直平分线,且当y=0时,与重合;当y=4时,A、B均在双曲线的虚轴上.故此时的轨迹方程为x=-1(y≠0,y≠4).②若,则,此时,的轨迹是以A、B为焦点,,,中心为(-1,2)的椭圆,其方程为,(y≠0,y≠4)故的轨迹是直线x=-1或椭圆,除去两点(-1,0)、(-1,4)评析:1、用直接法求动点轨迹一般有建系,设点,列式,化简,证明五个步骤,最后的证明可以省略,但要注意“挖”与“补”。
2、求轨迹方程一般只要求出方程即可,求轨迹却不仅要求出方程而且要说明轨迹是什么。
2.定义法:利用所学过的圆的定义、椭圆的定义、双曲线的定义、抛物线的定义直接写出所求的动点的轨迹方程,这种方法叫做定义法.这种方法要求题设中有定点与定直线及两定点距离之和或差为定值的条件,或利用平面几何知识分析得出这些条件.例2、已知ΔABC中,A,B,C所对应的边为a,b,c,且a>c>b,a,c,b成等差数列,|AB|=2,求顶点C的轨迹方程【解析】|BC|+|CA|=4>2,由椭圆的定义可知,点C的轨迹是以A、B为焦点的椭圆,其长轴为4,焦距为2, 短轴长为2, ∴椭圆方程为,又a>b, ∴点C在y轴左侧,必有x<0,而C点在x轴上时不能构成三角形,故x≠─2,因此点C的轨迹方程是:(─2<x<0)◎◎一动圆与圆外切,同时与圆内切,求动圆圆心的轨迹方程,并说明它是什么样的曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
53、人们通常会发现,法律就是这样 一种的 网,触 犯法律 的人, 小的可 以穿网 而过, 大的可 以破网 而出, 只有中 等的才 会坠入 网中。 ——申 斯通 54、法律就是法律它是一座雄伟的大 夏,庇 护着我 们大家 ;它的 每一块 砖石都 垒在另 一块砖 石上。 ——高 尔斯华 绥 55、今天的法律未必明天仍是法律。 ——罗·伯顿
谢谢!
51、 天 下 之 事 常成 于困约 ,而败 于奢靡 。——陆 游 52、 生 命 不 等 于是呼 吸,生 命是活 动。——卢 梭
53、 伟 大 的 事 业,需 要决心 ,能力 ,组织 和责任 感。 ——易 卜 生 54、 唯 书 籍 不 朽。——乔 特
55、 为 中 华 之 崛起而 读书。 ——周 恩来