盾构电液控制系统的载荷顺应性理论初探
盾构电液控制系统关键技术分析

盾构电液控制系统关键技术分析作者:罗志伟来源:《城市建设理论研究》2013年第11期【摘要】盾构是一种集机械、电气、液压测量和控制等多学科技术于一体专用于地下隧道工程开挖的技术密集型重大工程装备。
推进液压系统中推进力和推进位移复合控制技术作为盾构电液控制系统的一个关键技术,推进系统是盾构的关键系统,它主要承担着盾构的顶进任务,要求完成盾构的转弯曲线行进姿态控制纠偏以及同步运动等功能。
基于此,本文对推进系统进行了研究。
【关键词】盾构电液控制系统推进液压系统Abstract:Shield is a collection of mechanical, electrical, hydraulic multidisciplinary technology such as measurement and control in a body specialized in underground tunnel excavation .The technology intensive major engineering equipment. Propulsion thrust hydraulic system and to promote the displacement compound control technology as a shield electro-hydraulic control system is one of the key technology of propulsion system is the key to the shield system, it mainly bear the shield cap into the task, request to shield turn curve of attitude control and synchronous movement, and other functions. Based on this, in this paper, the propulsion system is studied.Keywords:ShieldElectro-hydraulic control system Thrust hydraulic system中图分类号:F407.6 文献标识码:A 文章编号:盾构是一种集机械、电气、液压、测量和控制等多学科技术于一体、专用于地下隧道工程开挖的技术密集型重大工程装备。
盾构电液控制系统实验平台液压系统设计与研究

0 引 言
电液 控 制 系统 占据 了盾 构 施 工控 制 系统 总 数量 的
基金项 目: 国家 重 点 基 础 研 究 发 展 计 划 ( 9 7 3计 划 ) : 2 0 1 2 C B 7 2 4 3 0 8
收 稿 日期 : 2 0 1 2 — 0 7 — 2 4
一
半 以上 , 其控制 性能 的好 坏直接 影 响到盾构 施工 的效
a n d l o a d mo d e l i n g h y d r a u l i c s y s t e ms o f c u t t i n g wh e e l d i r v i n g ,s c r e w c o n v e y i n g ,s h i e l d t h r u s t c o n t r o l mo d e l i n g ,s e g me n t a s s e mb l i n g .
盾构电气控制系统课件
地铁ห้องสมุดไป่ตู้构隧道施工
地铁盾构隧道施工是盾构电气控制系统应用的重要领域之一 。通过盾构电气控制系统,可以实现盾构机的自动化控制, 提高施工效率,减少人工操作失误,保证隧道施工的安全和 质量。
在地铁盾构隧道施工中,盾构电气控制系统主要负责控制盾 构机的推进、切削、拼装等动作,同时监测施工环境和设备 状态,保证盾构机在最佳状态下运行。
城市管廊盾构施工
城市管廊盾构施工是盾构电气控制系统在城市基础设施建设中的又一应用。管廊 是城市地下管道的综合走廊,包括电力、通信、燃气、供热等管道。
在管廊盾构施工中,盾构电气控制系统主要负责控制盾构机的切削、拼装等动作 ,保证管廊的施工质量。此外,该系统还可以实时监测管廊内部的环境参数,保 证管道的正常运行和安全性。
盾构电气控制系统课件
contents
目录
• 盾构电气控制系统概述 • 盾构电气控制系统的硬件组成 • 盾构电气控制系统的软件功能 • 盾构电气控制系统的应用案例 • 盾构电气控制系统的未来发展
01
盾构电气控制系统概述
盾构电气控制系统的定义与组成
电源系统
为盾构电气控制系统提供电力,包括发电机 、变压器、配电柜等。
05
盾构电气控制系统的未来发展
智能化与自动化
智能化控制
通过引入人工智能和机器学习技术,实现对盾构电气系统的智能控制,提高系统的自适应性、稳定性和可靠性。
自动化操作
利用自动化技术,实现盾构电气系统的自动化操作,减少人工干预,提高工作效率和安全性。
远程监控与云平台技术
远程监控
通过建立远程监控系统,实现对盾构电气系统的实时监测和远程控制,提高系统的可维护性和可管理 性。
基于Labview的盾构电液实验平台监控系统设计与研究

( S t a t e K e y L a b o r a t o r y o f S h i e l d Ma c h i n e a n d B o r i n g T e c h n o l o g y , C h i n a R a i l w a y T u n n e l G r o u p , Z h e n g z h o u 4 5 0 0 0 1 , C h i n a )
Байду номын сангаас
s y s t e m w a s d e v e l o p e d u s i n g d a t a c o l l e c t i o n t e c h n o l o g y o f P C I a n d L a b v i e w ,w h i c h c o u l d e f f e c t u a t e t h e r e a l - t i me c o l e c t i o n ,m a n a g e m e n t ,
a n d a na l y s i s o f t h e ma i n s h i e l d h y d r a u l i c s i g n l a p a r a me t e r s ,s u c h a s p r e s s u r e ,f l o w, t e mp e r a t u r e ,t o r q u e ,s p e e d o f a c t u a t o r ,a n d S O o n . Ho p i n g p r o v i d e e x p e i r me n t a l b a s i s f o r he t s t u d y o f s h i e l d e l e c t o- r h y d r a u l i c c o n t r o l s y s t e m.
开题报告(盾构机刀盘液压驱动与控制系统研究)

制盾构机掘 过控制预测, 土压平衡式
进方向的系 利用调节力 盾构机,每
统。
矩大小适当 分钟推进速
修正偏差。 度达60毫米。
二、国内外研究现状
盾构刀盘驱动液压系统
日本TAMAKI SHOJI和KATO MINORU于1994年申请的“盾构 掘进机的液压驱动技术”中为了提高液压系统的工作效能, 该系统通过一个齿轮驱动装置,实现了将某一失效的液压 马达的压力能转移到其它正常液压马达侧。
随着经济的发展,许多 地下工程建设,包括地 铁,市政,铁路,公路, 水利,矿山等会需要大 量的盾构隧道掘进机。
一、研究背景及意义
盾构机刀盘液压驱动与控制系统
盾构掘进机的关键技术主要 集中在欧,美和日本等少数几 个发达国家,我国也有几家企 业对盾构掘进机的开发作了有 益的探索,并取得了一些成果, 但与我国经济发展水平相比, 盾构技术发展相对较慢,还不 能满足国内工程建设的需求。
随着经济的发展,发展我国的 盾构技术已成当务之急,必须在 引进,消化,吸收国外先进技术 的基础上认真分析制约我国盾构 技术发展的关键性瓶颈,并组织 力量,联合攻关,以加速我国盾 构机的发展。
盾构机核心厂 商
海瑞 克
川崎
三菱 重工
一、研究背景及意义
刀盘液压驱动
具有良好的抗冲击能力 过载保护能力好 可靠性高,成本低
六、目录及参考文献
2.2 多泵组合液压驱动系统主要参数设计 2.2.1刀盘扭矩与系统压力设计 2.2.2系统流量与刀盘转速设计 2.2.3恒功率控制参数设计 2.2.4闭式回路换油和冷却设计
2.3 本章小结 第3章 多泵组合液压驱动系统仿真研究
3.1 AMESim软件简介 3.2 液压系统仿真模型建立 3.3 液压系统仿真参数设计
国产盾构机液压与电器控制系统简介
第2 ( 期 总第 1 期 ) 5
20 0 6年 3月
流体秸劫与 控副
F ui P w r mn miso a d Co t l l d o e r s s i n n n r o Mg 2 0 r 06
..
国产 盾构机液压与 电器控制 系统简介
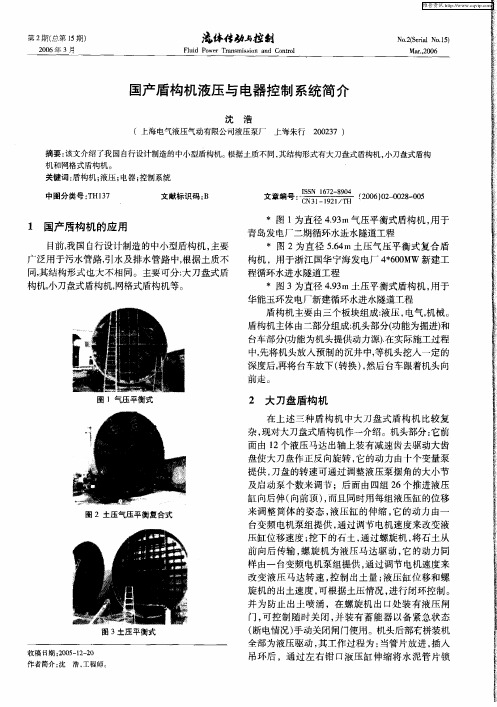
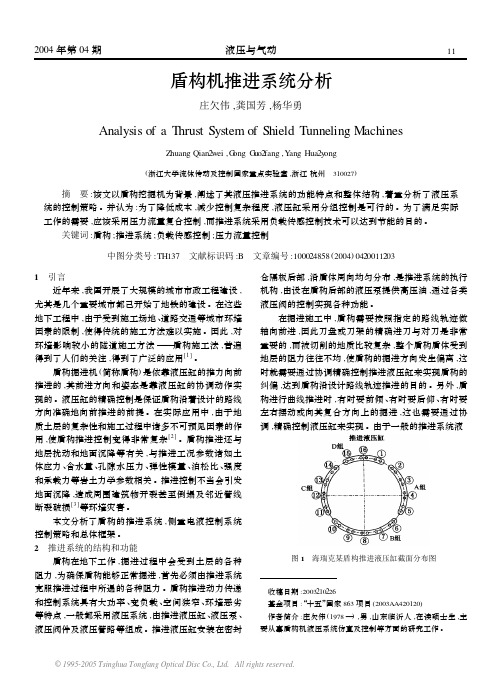
图1 为直径 4 3 . m气压平衡式盾构机 , 于 9 用 青岛发电厂二期循环水进水隧道工程 图2 为直径 5 4 . m土压气 压平衡式 复合 盾 6 构机 ,用于浙江 国华宁海发电厂 4 60 W 新建工 *0M 程循环水进水隧道工程
图3 为直径 4 3 . m土压平衡式盾构机 , 9 用于 华能玉环发电厂新建循环水进水 隧道工程
沈 浩
上海朱行 20 3 ) 027 (上海 电气液压气动有限公司液压 泵厂
摘要 : 文介绍 了我国 自行设计制造 的中小型盾构机。 该 根据 土质不 同 , 其结构形式有大刀盘式盾构机 , 小刀盘式盾构 机和 网格式盾构机 。
关键词 : 盾构机 ; 液压 ; ; 系统 电器 控制
中 分 号 H7 图 类 :I T3
: 盂
粥 t
? :
酶镳 铺 鞋 啦 撬 峰l 慵 嗥 懈 鹳 尊 u 讯
漤
|
_
|ilI ii l
I| i| |l I
() b
触摸屏相连接 , 同时与机头部分 的可编程序控制器 也相连 , 控制 台上触摸屏 : 有用于动力控制启停 设
图 1气压平衡式
2 大 刀盘盾构 机
在上述三种盾构机 中大 刀盘 式盾构机 比较 复 杂, 现对大刀盘式盾构机作一介绍。机头部分 : 它前 面由 l 个液压 马达出轴上装有减速齿去驱动大齿 2 盘使大刀盘作正反向旋转 , 的动力 由十个变量泵 它 提供 , 刀盘的转速可通过调整液压泵摆角的大小节 及启动泵个数来调节 ;后面 由四组 2 个推进液压 6 缸 向后伸( 向前顶 )而且同时用每组液压缸的位移 , 来调 整筒体 的姿态 , 液压缸的伸缩 , 的动力 由一 它 台变频 电机泵组提供 , 通过调节电机速度来改变液 压缸位移速度 ; 挖下 的石土, 通过螺旋 机 , 将石土从 前 向后传输 , 螺旋机 为液压马达驱 动 , 的动力 同 它 样 由一 台变频 电机泵组提供 , 通过调节 电机速度来 改变液 压马达转速 , 控制出土量 ; 液压缸位移和螺 旋机 的出土速度 , 可根据土压情况 , 进行闭环控制 。 并 为防止出土喷涌 ,在螺旋机出 口处装 有液压 闸 门, 可控 制随时关 闭 , 并装有 蓄能器 以备紧急状态 ( 断电情况) 手动关闭闸门使用。机头后部有拼装机 全部为液压驱动 , 其工作过程为 : 当管片放进 , 插入 吊环 后 ,通 过左 右钳 口液压缸伸缩将水 泥管片锁
电液负载模拟器多余力的混合补偿策略
电液负载模拟器多余力的混合补偿策略蒋毅;王海波;钱宇【摘要】针对电液负载模拟器因存在多余力而影响加载精度的问题,建立负载模拟器数学模型,分析多余力产生机制,提出包含定常补偿器和干扰观测器(Disturbance observer,DOB)的多余力混合补偿策略以提高加载精度.首先基于结构不变性原理设计定常补偿器,再通过求解H∞混合灵敏度问题获得DOB,补偿剩余多余力并提高系统鲁棒性.静态、高频动态力函数跟踪仿真表明多余力减少65%以上,动态响应快速,摄动仿真表明负载模拟器对系统不确定性的影响有较好的鲁棒性;动态加载试验证明了策略的正确性和有效性.【期刊名称】《液压与气动》【年(卷),期】2017(000)003【总页数】6页(P43-48)【关键词】电液负载模拟器;多余力;H∞鲁棒控制;干扰观测器;结构不变性【作者】蒋毅;王海波;钱宇【作者单位】西南交通大学机械工程学院,四川成都610031;西南交通大学机械工程学院,四川成都610031;西南交通大学机械工程学院,四川成都610031【正文语种】中文【中图分类】TH137;TP273电液负载模拟器复现载荷谱的精度越高,试验数据的参考价值则越大。
但负载模拟器作为被动施力系统,被测设备的位移会对其加载力造成强烈干扰,即“多余力”,且难以完全消除,严重影响力加载精度。
因此多余力抑制成为负载模拟器研究的关键性问题。
许多学者对此问题进行了研究,基于结构不变性原理的速度前馈补偿策略[1-3]在工程上被广泛应用。
但因理想补偿环节存在高阶微分环节,且系统实际模型总存在不确定性,以及获取被测设备速度时存在噪声干扰,因此只能实现近似补偿。
为改善多余力抑制效果,学者们尝试应用CACM神经控制算法[4-5],H∞控制[6]和基于干扰观测器[7-9] (Disturbance observer,DOB)的鲁棒控制等策略抑制多余力。
但是位置强干扰产生的多余力大,因此控制器的设计指标范围过宽,控制器保守性较大,限制了闭环系统带宽和动态性能。
文献综述-土压平衡式盾构机液压系统设计与分析

1.文献综述盾构掘进机是一种隧道工程专用的大型高科技综合施工设备。
它集电气、液压、测量导向、控制、材料等多学科技术于一体,具有开挖切削土体、输送土碴、拼装隧道衬砌、测量导向纠偏等功能。
采用盾构掘进机,施工速度快,自动化程度高,一次成型,有利于环境保护和降低劳动强度。
而且盾构掘进机适用范围广,从软土、淤泥到硬岩都可应用,施工质量高,可控制地面沉降,开挖时不影响面上建筑和交通,与传统的隧道工程相比,具有明显的优势。
我国幅员辽阔,不同地区的地质情况复杂多变,有必要形成适合我国国情的适应性理论指导。
搭建盾构模拟实验平台,可为我国盾构掘进机的设计、制造提供实验数据和理论支持,具有重要的意义。
推进液压系统作为模拟盾构掘进机的一个关键部分,它的协调动作可以使其保持合适的姿态,是模拟盾构掘进机能够沿着设计路线方向准确向前推进的关键所在。
本文主要讨论模拟盾构推进液压系统的设计和控制研究。
盾构根据其断面形状可分为单圆盾构,复圆盾构(多园盾构)、非圆盾构,其中复圆盾构可分为双圆盾构和三圆盾构,非圆盾构可分为椭圆形盾构、矩形盾构、马蹄形盾构、半圆形盾构。
复圆盾构和非圆盾构统称为“异形盾构”。
盾构按支护底层的形式分类,主要分为自然支护式、机械支护式、压缩空气支护式、泥浆支护式,土压平衡支护式5种类型。
盾构按开挖面与作业式之间隔板构造可分为全敞开式、部分敞开式及闭胸式三种。
国外用盾构施工已经有180多年历史,1866年,莫尔顿在申请专利中第一次使用了“盾构”这一术语。
当今世界上最具有实力的全断面隧道掘进机制造公司,有美国的罗宾斯公司、佳伐公司、德国维尔特公司、海伦公司,日本川崎、三菱公司,法国FCB公司、法马通公司,英国豪顿公司等。
我国全断面隧道掘进机的研制是从20世纪60年代开始的,但与国外掘进机相比差距很大。
本文介绍了国内外盾构技术的发展历程和应用现状,阐述了盾构施工法新技术的特点,并在此基础上对盾构技术的发展趋势进行了展望。
盾构管片拼装机电液控制分析

平 台旋 转
平 台摆 动 平 台侧 倾
10m 0m 10m 0r a
10m 0m
2 0 a 1b r 2 0 a 1b r
2 O a 1b r
节 正反 向速度 。 电液 比例 方 向 阀出 口的压力 油大 部分 进 拼 装 系 统 中 以 圆周方 向旋 转运 动 控 制是 最 为 主要 入 马达平 衡模 块 ( 也称液 压锁 ) 而另 外一 小部 分 则经 过 , 的组 成 部分 ,因 此本 文 以 6 2 m的维 尔特 盾 构 机 的 为 梭 阀 Z 5 1 .8 V 1 5自动 选取 两端 油 口最 高 压力 。然 后通 过 二 例 , 重其旋 转运 行 电液控制 分析 。 着
( 旋转 负载 大 , 求最 大 旋转 扭矩 12N , 止 扭 设有机 械制 动 。 2 ) 要 6Km 静 这样 管片拼 装机 回转运 动 的安全 保 护措
矩 30N ; 3K m
施就 可 以有 液 压制 动 、 械 制 动双 保 险 , 可 达 到无 泄 机 并 漏保压 , 全性 能得 到提高 。在 管 片拼 装机 实 际使 用过 安
关键 词 :盾构; 管片拼装机; 电液控制Байду номын сангаас术
管片拼 装机 , 又称 举重 臂 , 是盾构 的重 要组 成 部分 。
首先 , 我们 先来 了解 , 电液 控制 的原 理 。 压传 动 系 液
它 是一 种设 置在盾 尾 部位 , 以迅速把 管 片拼装 成 确定 统 一般含 有一 个或 几个基 本液 压 回路 , 括控 制执 行元 可 包 形 式 的起 重 机械 。 该系 统主 要完成 从管 片抓取 到管 片被 件运 动速 度 的速度 控制 回路 , 控制 液压 系 统全 部或 局 部 装 成管 片环 的一 系列过 程 。盾 构 顺利 掘进 完一 环后 , 管 压 力 的压 力控 制 回路 , 来控 制执 行元 件 ( 用 液压 油 缸 、 液 片 拼 装机 负责 将预 先 制好 的管 片安 装 到 刚开 挖 的 隧道 压 马达) 运动 方式 的换 向回路 等 。功 能复 杂 的液压 传 动
盾构液压系统的设计与性能分析
盾构液压系统的设计与性能分析一、引言盾构液压系统作为盾构机主要控制系统之一,在隧道施工中扮演着重要角色。
本文将着重探讨盾构液压系统的设计原理和性能分析,以帮助读者更好地了解和应用盾构液压系统。
二、盾构液压系统的设计原理1. 系统组成盾构液压系统主要由液压控制单元、工作流体、执行器和控制元件等组成。
液压控制单元包括主控制阀、液压泵、油箱和油液过滤器等。
工作流体通常使用油作为介质,它承担着传递动力和控制信号的功能。
执行器包括液压缸和液控换向阀等,用于控制盾构机的开、关、转动等操作。
控制元件包括传感器、液压阀和操纵台等,用于感知运行状态并进行相应控制。
2. 系统工作原理盾构液压系统的工作原理是通过控制液压泵的运行产生的液压力来实现盾构机运动的控制。
当操纵台上的操作杆操作时,操纵台上的传感器会感知到并将信号传递给主控制阀,主控制阀会按照信号指令控制液压泵的运行和泵送的油量。
油液通过液压泵进入液压缸,推动盾构机运动。
同时,液控换向阀根据传感器的信号控制液压缸的转向和速度。
三、盾构液压系统的性能分析1. 系统的传动效率盾构液压系统的传动效率是衡量系统性能的重要指标之一。
传动效率高意味着系统能够更好地将能量传递给执行器,并保持较低的能量损失。
为提高传动效率,设计中应选择高效的液压泵、控制阀和执行器,并采取有效的密封措施来减少泄漏。
2. 系统的稳定性盾构液压系统的稳定性直接影响盾构机的运行效果和工作安全性。
在系统设计中,应考虑合适的工作流体的粘度和温度,以确保系统在不同工况下的稳定性。
此外,合理的系统结构和控制参数设置也对系统稳定性至关重要。
3. 系统的响应速度盾构液压系统的响应速度主要受液压泵的流量输出和执行器的尺寸等因素影响。
高响应速度意味着系统能够更快地实现操作指令,提高盾构机的工作效率。
在液压泵和执行器的选型中,应考虑系统所需的最大流量和操作速度,并适当增加液控换向阀的数量以提高响应速度。
4. 系统的负荷能力盾构液压系统的负荷能力是指系统能够承担的最大工作负荷。
盾构机推进系统分析
盾构机推进系统分析庄欠伟,龚国芳,杨华勇Analysis of a Thrust System of Shield Tunneling MachinesZhuang Qian2wei,G ong G uo2fang,Y ang Hua2y ong(浙江大学流体传动及控制国家重点实验室,浙江杭州 310027)摘 要:该文以盾构挖掘机为背景,阐述了其液压推进系统的功能特点和整体结构,着重分析了液压系统的控制策略。
并认为:为了降低成本,减少控制复杂程度,液压缸采用分组控制是可行的。
为了满足实际工作的需要,应该采用压力流量复合控制,而推进系统采用负载传感控制技术可以达到节能的目的。
关键词:盾构;推进系统;负载传感控制;压力流量控制中图分类号:TH137 文献标识码:B 文章编号:100024858(2004)04200112031 引言近年来,我国开展了大规模的城市市政工程建设,尤其是几个重要城市都己开始了地铁的建设。
在这些地下工程中,由于受到施工场地、道路交通等城市环境因素的限制,使得传统的施工方法难以实施。
因此,对环境影响较小的隧道施工方法———盾构施工法,普遍得到了人们的关注,得到了广泛的应用[1]。
盾构掘进机(简称盾构)是依靠液压缸的推力向前推进的,其前进方向和姿态是靠液压缸的协调动作实现的。
液压缸的精确控制是保证盾构沿着设计的路线方向准确地向前推进的前提。
在实际应用中,由于地质土层的复杂性和施工过程中诸多不可预见因素的作用,使盾构推进控制变得非常复杂[2]。
盾构推进还与地层扰动和地面沉降等有关,与推进工况参数诸如土体应力、含水量、孔隙水压力、弹性模量、泊松比、强度和承载力等岩土力学参数相关。
推进控制不当会引发地面沉降,造成周围建筑物开裂甚至倒塌及邻近管线断裂破损[3]等环境灾害。
本文分析了盾构的推进系统,侧重电液控制系统控制策略和总体框架。
2 推进系统的结构和功能盾构在地下工作,掘进过程中会受到土层的各种阻力,为确保盾构能够正常掘进,首先必须由推进系统克服推进过程中所遇的各种阻力。
《基于液黏传动的机电液耦合系统动态匹配特性及控制策略研究》

《基于液黏传动的机电液耦合系统动态匹配特性及控制策略研究》篇一一、引言随着工业技术的不断发展,机电液耦合系统在许多领域得到广泛应用。
特别是在传动系统中,液黏传动因其良好的承载能力和广泛的调速范围被广泛采用。
因此,对于基于液黏传动的机电液耦合系统的动态匹配特性及控制策略的研究具有重要的现实意义和应用价值。
本文将深入探讨该系统的动态匹配特性,并针对其控制策略进行研究。
二、液黏传动的基本原理与特点液黏传动是一种利用液体作为传动介质的传动方式,其基本原理是通过改变液体的流动状态来传递动力和转矩。
液黏传动具有承载能力强、调速范围广、振动小等优点,因此被广泛应用于各类机电设备中。
然而,液黏传动系统涉及到机械、液压和控制等多个领域,其动态匹配特性和控制策略的研究具有一定的复杂性。
三、机电液耦合系统的动态匹配特性(一)系统组成及工作原理基于液黏传动的机电液耦合系统主要由液黏传动装置、电机、传感器和控制单元等部分组成。
在工作过程中,电机通过液黏传动装置将动力传递给负载,传感器实时监测系统的运行状态,控制单元根据传感器的反馈信息对系统进行控制,以实现系统的动态匹配。
(二)动态匹配特性分析系统的动态匹配特性主要表现在传动效率、响应速度和稳定性等方面。
在传动效率方面,液黏传动装置能够根据负载的变化自动调整传动比,使系统始终处于高效工作状态。
在响应速度方面,控制单元能够根据传感器的实时反馈信息快速调整电机的运行状态,使系统能够快速响应外界变化。
在稳定性方面,系统通过控制单元对各部分进行协调控制,使整个系统保持良好的稳定性。
四、控制策略研究(一)传统控制策略传统的控制策略主要包括PID控制、模糊控制和神经网络控制等。
这些控制策略在机电液耦合系统中得到广泛应用,能够有效提高系统的稳定性和响应速度。
然而,这些策略往往难以实现系统的最优控制,尤其在复杂的工作环境中,系统的性能容易受到影响。
(二)优化控制策略针对传统控制策略的不足,本文提出了一种基于自适应控制的优化控制策略。
一种新型电液作动系统

一种新型电液作动系统
徐步力;付永领
【期刊名称】《机床与液压》
【年(卷),期】2002(000)005
【摘要】本文提出了一种新型的电液作动系统,即电动静液作动器EHA.针对具体的电动静液作动器,用EASY5软件对系统进行了仿真分析,仿真结果表明所设计的系统具有良好的动态性能,并达到给定的性能指标.
【总页数】3页(P52-53,231)
【作者】徐步力;付永领
【作者单位】北京航空航天大学自动化学院,100083;北京航空航天大学自动化学院,100083
【正文语种】中文
【中图分类】TP271+.4
【相关文献】
1.一种新型电静液作动飞机刹车系统 [J], 张谦;李兵强
2.一种新型电液控制无级变速作动系统 [J], 贺林;吴光强;孟宪皆;王伟
3.一种新型机载一体化电液作动器的设计与分析 [J], 李军;付永领;王占林;高波
4.一种新型电液回路(三):电液集成块液压系统的CPU控制 [J], 石灰惠
5.新型机载一体化电液作动器的系统设计与仿真 [J], 李军;付永领;王占林
因版权原因,仅展示原文概要,查看原文内容请购买。
基于神经网络的盾构推进液压系统控制策略研究

基于神经网络的盾构推进液压系统控制策略研究近年来,随着城市发展的快速推进,地下空间的利用正变得越来越重要。
盾构机作为一种高效、安全、环保的地下工程施工装备,被广泛应用于地下交通、地下管线等工程中。
然而,在盾构机施工过程中,液压系统控制策略的研究是一个至关重要的问题。
盾构机的推进过程主要靠液压系统提供的推进力完成,因此液压系统的控制策略直接影响到盾构机的推进效率和安全性。
而神经网络作为一种模拟人脑神经元工作方式的计算模型,具有自学习、自适应、非线性映射等优点,被广泛应用于复杂系统的控制中。
本文旨在研究基于神经网络的盾构推进液压系统控制策略,并优化盾构施工过程中液压系统的性能。
本研究选取典型盾构施工过程中的推进力及推进速度为控制目标,设计神经网络控制器,实现对液压系统的策略控制。
首先,本研究利用卷积神经网络(CNN)对盾构机施工过程中的传感器数据进行处理。
通过将传感器数据输入神经网络,训练神经网络模型,实现对推进过程中的力学特性的识别和预测。
其次,本研究结合反向传播算法,优化神经网络控制器。
在训练过程中,通过与实际施工过程中的数据对比,通过反向传播算法对神经网络控制器的权重和偏差进行调整,提高神经网络控制系统的控制性能和适应性。
然后,本研究基于神经网络控制器设计了闭环控制模型,实现了对盾构推进速度和力度的精准控制。
通过将传感器数据实时反馈给神经网络控制器,在施工过程中对液压系统参数进行实时调整,提高推进效率。
最后,在盾构机实际施工过程中对该神经网络控制策略进行了验证。
通过与传统的PID控制策略进行对比,结果显示基于神经网络的盾构推进液压系统控制策略在推进效率和控制精度方面均有所提高。
实验证明了神经网络在盾构推进液压系统控制中的有效性。
综上所述,基于神经网络的盾构推进液压系统控制策略具有良好的控制性能和适应性。
该控制策略能够提高推进效率并保证施工安全,为地下空间利用提供了可靠的技术支撑。
然而,本研究仍然存在一些不足之处,如对神经网络模型的优化、实际施工环境与模型之间的差异等问题,仍需进一步研究本研究通过使用神经网络模型实现了盾构推进过程中力学特性的识别和预测,并通过反向传播算法对神经网络控制器进行优化。
论国产盾构机液压与电气控制系统研究
论国产盾构机液压与电气控制系统研究摘要:盾构机是高度自动化的隧道掘进专用机械工具,广泛被应用在各种城市隧道工程建设中。
本文结合我国自行设计制造的盾构机,针对液压系统及电气控制系统进行了简单的分析和研究。
关键字:盾构机液压电气控制系统盾构机是一种开挖地下工程施工的专用工程机械,主要由推动系统、盾体刀盘驱动系统等构成。
当下我国盾构机是集电、液、控制、信息技术于一体的智能化大型工程机械设备,具有输送渣土、测量导向、开挖切削土体等功能。
文章结合国产盾构机的发展现状、问题,以及小直径盾构机,对国产盾构液压和电气控制系统进行了简单的阐述。
一、国产盾构机的现状与应用(一)我国盾构机现状从20世纪90年代开始,我国盾构机技术开始有了明显的发展,重点开展了土压平衡盾构,引进了先进的泥水加压盾构技术。
由于没有相关的实用盾构技术能力,盾构研发技术落后,所以,我国盾构技术还处于发展的阶段。
(二)国内盾构机的应用根据盾构机使用地域不同,目前我国的盾构机主要应用于:引水和排水管道,污水管路,或者根据土质不同、结构形式不同的其他利用。
盾构机主要由液压、电气、机械三个板块组成,分为台车部分和盾体部分。
二、盾构机液压、电气控制系统盾构机是集开挖、支护、衬砌、出碴于一体的隧道施工专业设备。
盾构机在隧道的掘进过程中,主要由以下三个运动完成:一是刀盘旋转切削土体,二是盾体的整体推进,三是管片的拼装,此三大运动主要由液压系统及电气控制系统共同完成。
盾构机液压、电气系统具备刀盘旋转、盾体推进、管片拼装、铰接伸缩、碴土排出等需要实现相对运动的功能系统。
(一)液压系统在盾构技术上,液压技术在盾构机上得到了充分的应用,通过精确控制液压缸来保证盾构机按设计路线稳定、准确掘进,故盾构机液压系统在盾构机工作中起到主要作用。
盾构液压系统主要由盾体推进、管片拼装、铰接伸缩等功能系统组成。
盾构机推进系统中,单个液压缸推进力F与油缸数量n和盾构机外径D有关,一般情况如下[4]:以4.35m盾构机为例,通过盾体内布置情况及盾构总推力验算,最终取n=16,F=1200kN即推进系统由16个液压油缸组成,每个推进油缸推力1200KN,总推力19200KN。
盾构电液控制系统综合试验平台[发明专利]
![盾构电液控制系统综合试验平台[发明专利]](https://img.taocdn.com/s3/m/fab5dfb63b3567ec112d8aec.png)
专利名称:盾构电液控制系统综合试验平台
专利类型:发明专利
发明人:洪开荣,陈馈,李凤远,孙善辉,王助锋,陈啟伟,冯欢欢申请号:CN201110395900.7
申请日:20111202
公开号:CN103135512A
公开日:
20130605
专利内容由知识产权出版社提供
摘要:本发明涉及了一种盾构电液控制系统综合试验平台,综合试验平台主要由液压控制系统、数据采集及控制系统和控制系统软件三部分组成。
液压控制系统主要包括三个单元:刀盘\管拼装机\螺旋输送机负载模拟系统,刀盘\管拼装机\螺旋输送机驱动及控制系统;推进负载模拟系统,推进驱动及控制系统;多自由度管片拼装定位控制系统。
数据采集与控制系统主要用于盾构电液控制系统的监控,同时实时采集和记录来自试验平台中各种传感器和设备的运行数据,从而保证液压系统单元中的刀盘驱动模拟、推进系统动作以及泵、马达和阀的性能测试等各试验的顺利开展。
申请人:中铁隧道集团有限公司
地址:471009 河南省洛阳市西工区陵园东路3号
国籍:CN
代理机构:北京神州华茂知识产权有限公司
代理人:吴照幸
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
构 排 土量 保持 或接 近 平衡 ,以此 来保 证 开 挖地 层 的稳 定, 防止地 面 变形 。因此 , 压平 衡 式盾 构 施 工过 程 中 土
2 盾 构 推 进 自适应 系 统
盾 构 推进 系统 是 盾构 掘进 时建 立土 压平 衡 模式 的 主要 系 统 . 主要 是 实 现盾 构在 土法 划分 土 的类 别 ,使 用 贴 近度 的计 算方 法 得 到
样 本所 属 地层 的量化 参 数 ,并 据此 查 询盾 构施 工 的 专
家 经验 库 , 系统 输 出 与地层 相 适应 的控 制参 数 , 而 使 进 实 现刀 盘驱 动液 压系统 的 功率 自适 应 控制 。
盾构 推 进 时 ,位移 传感 器 将 实时 检测 的推进 液 压
缸位 移信 号 反馈 给 中 央控 制器 , 步 处理 后 , 与期 望 初 先
统可 以实 现负 载流量 的匹配 。系统 的工作 压力 分为 高 、
低两 档 , 分别 对应 “ 硬土 ” 软 土 ” 和“ 的状态 , 进 中通 过 掘 切换 高 、 压 溢 流 阀实 现 , 低 在各 档 压 力 范 围 内 , 统 输 系 出 的扭 矩 与负 载相 匹配 。可见 , 液压 系统可 以通过 适 该
适应 。
3 螺 旋 输送 自适 应 系统
当盾构 由千斤 顶 向前 推进 时 ,由刀 盘切 削 下来 的 碴 土 充满 密 封 舱 和 螺旋 输 送 机 壳 体 内 的全 部 空 间 . 依 靠 密封 舱 内碴 土 的 内压 与开挖 面土层 的水 土压 力保 持 平衡 。通过调 节螺 旋输送 机 的转速 来控 制排 土量 . 使盾
Ab t a t T i a e n l s s te a a t e s s m fc t r h a d vn sr c : h s p p r a a y e h d p i y t v e o u t - e d r ig, s il d vn a d c e c n e i g whc c n d p e i h e d r i g n s r w i o v yn , ih a a a t
基 金 项 目: 家 9 3计 划 课 题 (0 2 B 2 3 8 国 7 2 1C 7 4 0 1
收 稿 日期 :0 1 1— 6 21-22 作 者 简 介 : 欢 欢 (9 7 ) 男 , 北 随 州 人 , 士 , 从 事 盾 构 及 掘 进 液 冯 18一 , 湖 硕 现
性 ,这 就要 求 刀盘 驱 动 液压 系统 能 根据 地 质 状况 不 断 地 在线 调整 自身参数 , 以提高 盾构 的地 层适应 性 。 李 喜 莲l 出 了一 种 基 于 地 层 识 别 的 刀 盘 功 率 自 l 1 提
速度 值相 比较 , 在基 于 B 再 P神 经 网络整 定 的 P D控 制 I
器单 元 进行 运算 处 理 ,调 整调 速 阀 比例 电 磁铁 的输 人
控制 电信 号 , 终实 现对推 进速 度 的 自适 应控 制 。 最
当的控 制策 略 使变 量 泵 的输 出功 率 始终 和 负载 功率 相
这 些都 是 盾构设 计 与施 工 中的重 要课 题 。 刀盘 驱 动 系统 的 外部 负 载 变化 ,要求 刀 盘 驱动 液
图 l 外 负 载 与 子 系统 控 制 参 数 关 系 框 图
1 刀 盘 驱 动 自适 应 系统
盾构 刀 盘驱 动 液压 系统 在盾 构 掘进 过 程 中 .由于 地 质 构造 复 杂 .因此 刀 盘负 载 多变 且具 有 很 强 的非线
关键词 : 构 ; 液控制系统 ; 荷顺应性 ; 盾 电 载 自适 应 中图 分 类 号 : H1 79 T 3. 文 献 标 识码 : A 文 章 编 号 :0 8 0 1 ( 0 2 0 — 0 1 0 10 — 8 3 2 1 )4 0 0 - 3
Prm ay Dic si n n t Lo d n —a a tb l y Th o o i r su so o he a i g—d p a it i er y f S il El cr — y r u i Con r l S se h ed e to—h d a l c to y tm
压技术研究 。
液 压 气 动 与 密 封 /0 2年 第 4期 21
适 应控 制 方法 ,功率 自适 应 控 制原 理框 图如下 图 2所 示 。该 方法 以不 同地层 中 的试验 数据 为依 据 , 过统计 通
应 迅 速 , 调 量 小 , 良好 的 自整定 能 力 , 于盾 构 推 超 及 对 进 速度 这种 非线性 过程 , 制效果 比较 理想 。 控
Hv r u i sP e ma is& S asNo4 2 2 da l n u t c c e l/ . .01
盾构 电液控 制 系统 的载荷顺应性理论初 探
冯 欢欢 1, , 陈 馈 , 2 李凤 远
( . 构及 掘进 技术 国家 重点 实验 室 , 南 郑 州 1 盾 河 2西 南交 通大 学 机 械 工程学 院 , . 四川 成 都
态 的控 制 及盾 构 在 曲线段 掘 进 。其 需要 满 足三 大 功能
要求 : 制 推进 过 程 中地 表 的沉 降 、 控 针对 水 土压 力及 时
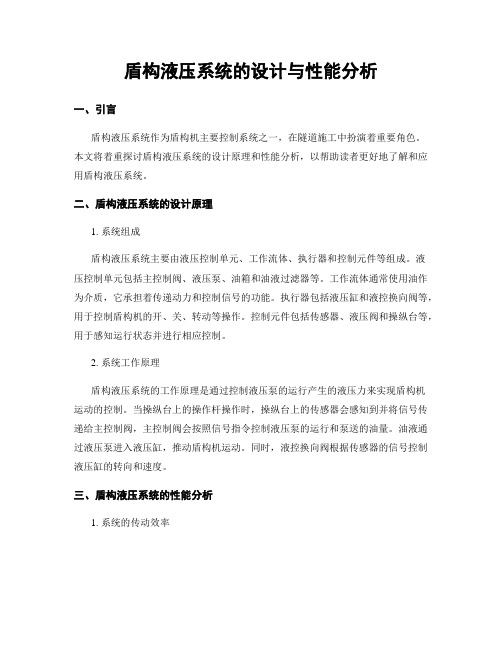
11 一 装 阀 、3 插
24二位三通电磁换向阀 、一
3 一比例 溢 流 阀
5 液控 单 向阀 一
图 2 功 翠 自 适 应 控 制 原 理 框 图
6压力传感器 一
7 液压缸 一
8 一内置 式 位 移 传 感 器
9 - 位 二 通 电磁 换 向 阀 l一 流 阀 l一 向 阀 - O溢 1单 1 一 位 四通 电磁 换 向 阀 1一比例 调 速 阀 2三 4 图 3 单 个 分 组 液 压 原 理 图
化 , 而 引 起 地 表 的 变形 , 果 轻 则 降 低 工 程 质 量 、 进 结 延 缓工 程进 度 , 重则 引起施 工 安全 事故 。如 何通 过设 定盾
构施 工参 数 , 保 证 开挖 面 稳定 的 同时 , 在 减小 对 地层 的
扰 动 , 且 使 得 盾 构掘 进 过程 中能 耗 最 低 , 率 最 高 , 并 效
t e h n e f u tr h a c ip n — e i a c , s il p o el g r ss n e o e mei o t ie r su e F r te e e g - f ce t h c a g o c t — e d h p i g r ss n e e t h e d r p l n e it c r h r t c n a n r p e s r . o h n r y e in i a c i d rn s il c n tu t n, i x o n s o p r t e c n r lmeh d o h e d s b y tm o i g p r mee s a d b r g la s o t e u g h ed o sr c i i o t e p u d a c o e ai o t t o fs il u s se b r a a tr n o n o d , n h v o n i b ss fe rh p e s r aa c . T e es t e p may la i g a a t b l y h o y o h ed e e t - y r u i o t l y t m , p o i i g ai o a t r s u e b l n e h n g t h r r o d n — d p a i t t e r fs i l lc r h d a l c n r s se i i o c o rvdn s i l d sg n o s c in wi et i h o e ia u d n e h ed e in a d c n t t t c r n t e r t lg i a c . u r o h a c Ke wo d s il ee t - y r u i c nr l y tm ; l a i g a a tb l y; a a t n y r s: h e d; lcr h d a lc o t s s o o e o d n — d p a i t d pi i o
采用 基 于地 层 识别 的刀盘 功 率 自适应 控 制原 理 而
设 计 的控 制 系统 。 有 可适 应 不 同地层 需 求 的能 力 , 具 该
系统 采用 变 量 泵控 定 量马 达 的容 积调 速 回路 ,电 比例 变量 泵 的排 量 可 以根 据土 层 的变 化实 时 调节 ,因而 系
F ENG Hu n h a 1 , HEN Ku IL F n - u n。 a— un,C 2 i, I eg y a
(.Sae e a oaoy o he c iea d B r gT c nlg , Z e gh u 5 0 3 C ia 1 t K y L b rtr fS i d Mahn n oi eh o y t l n o h n zo 4 0 0 , hn ;
O 引言
盾 构 掘进 过 程 中 的负 载是 实 时 变化 的 .难 以用一
压 系统 的驱 动 功 率发 生 变化 ; 进 负 载 的变化 , 引起 推 会 盾 构掘 进 速度 变 化 ; 刀盘 端 面 土压 力 的变 化 , 要求 螺 则
旋输 送 系 统 的转 速 随之 变化 ,才能 维 持密 封 舱 土压 平 衡 。负载 与 刀盘驱 动 、 推进 系统及 螺旋 输送 系统 的控 制 参 数 间的变 化 关 系如 下 图 1所示 。如何 通 过 电液 控 制 系统 的优化 设 计来 改 变 盾构 各 子 系统 的控 制 参数 以适 应 外 负载 的变 化 , 是本 文 的研究 重点 。 便