20-A320自动飞行系统自动推力
20-A320自动飞行系统自动推力讲述

现在让我们来看一下飞行制导如何实现自动推力控制功能:即自动推力系统,或A/THR。
例如:最大爬升、慢车例如:巡航、进近调节推力以保持目标速度/马赫数自动推力可以以两种不同的方式工作:●速度方式:自动推力不断调节推力以保持目标速度或马赫,例如在巡航或进近期间。
●推力方式:自动推力设置指定的推力,例如最大爬升推力或慢车推力。
速度方式固定推力推力方式轨迹速度/马赫目标速度方式推力方式自动推力方式自动与自动驾驶仪/飞行指引仪的垂直方式相联接:●当自动驾驶仪/飞行指引仪的垂直方式控制轨迹,例如高度保持方式,垂直速度方式,下滑道方式…时,自动推力处于速度方式。
●当自动驾驶仪/飞行指引仪的垂直方式调节飞机姿态以保持目标速度或马赫,例如爬升方式,下降方式…时,自动推力处于推力方式。
飞行员主要使用油门杆控制自动推力。
在A320飞机上,自动推力在调节推力时不能逆向驱动油门杆。
让我们进一步看一下油门杆。
IDLECLIMB IDLEFLEX/MCTCLIMBIDLETO/GAFLEX/MCTCLIMBIDLE 当自动推力断开时,机组和平常一样通过在四分之一圆周内移动油门杆来控制推力。
对于正推力,该四分之一圆周中有四个卡槽或制动点,它们是:●慢车●爬升,用于设置最大爬升推力●灵活/MCT,用于设置起飞时的灵活推力或最大连续推力●TO/GA,用于设置最大起飞或复飞推力只有当油门杆设置在慢车卡槽以前时自动推力才能工作。
如果飞行员将油门杆设置在反推扇区中,自动推力不能工作。
当自动推力接通时,油门杆的位置确定了自动推力可以指令的最大推力。
例如,当使用速度方式加速时。
油门杆位置显示在“推力”表上,指示在正常操作中自动推力可使用的推力。
“推力”表将在发动机一章中讨论。
“推力”表推力杆位置自动推力可用推力断开待命接通自动推力有三种状态。
包括:●断开,或OFF●待命,通过飞行员在油门杆上的特定动作可接通,或者●工作,或ON现在我们正在向跑道滑行…因为我们在地面上,自动推力必须断开。
空客A320系列飞机双发推力不一致问题的研究
空客A320系列飞机双发推力不一致问题的研究作者:陶弢来源:《神州》2012年第25期摘要:飞机的起飞、着陆阶段是整个飞行过程中的危险阶段,在此阶段出现问题,留给飞行员的决断时间很短,如何正确处置对保证安全、预防事故至关重要。
本文重点分析两种较为常见的、比较典型的、非系统故障导致的、空客A320系列飞机(V2500-A5发动机)起飞加速阶段双发EPR不一致问题。
空客A320系列飞机机队近年多次出现起飞滑跑加速阶段双发EPR(发动机压比,表征发动机推力)不一致,引起飞机起飞滑跑跑偏、甚至导致起飞中止,给飞行机组操作和航班运行带来了极大的困扰,经过发动机管理中心会同空客专家、IAE(发动机原厂)专家进行长期跟踪、数据采集和分析,认为近年来较为常见的A320飞机起飞加速阶段EPR不一致问题,并非系统故障导致,是由飞机本身控制逻辑引起,主要存在两种典型的诱因,下文将主要对有关控制逻辑和诱因做进一步剖析。
一、发动机“KOZ”逻辑导致的EPR不一致* 背景知识及控制逻辑分析“KOZ”即英文Keep-Out Zone的缩写,字面上的意思可理解为“(转速)抑止区域”,该控制逻辑于2003年4月通过升级EEC(发动机电子控制)软件到SCN17版引入,其目的是为了防止V2500-A5发动机风扇叶片颤振,在地面静止工作状态,EEC控制逻辑防止发动机低压转子转速(N1)稳定在61%——74%范围内,因此,当机组在地面推油门杆加速时,由于“KOZ”的影响,机组可能会观察到发动机推力(EPR表征)不与油门杆角度成线性增长,如图一所示,油门杆向前移动时,EPR指令值被冻结在KOZ下限区域(2),直至油门杆位置对应的EPR指令值超过1.215(KOZ区域上限),EPR指令值才会迅速上升超过KOZ区域上限,此后与油门杆角度变化同步。
图一此外,根据空客维护手册,发动机油门杆位置对应的EPR指令值会随着T2温度(发动机进口总温)和机场标高的改变而改变,如图二所示,在油门杆位于CL位(爬升位)时,如果T2温度高于30度,对于标高0英尺以上的机场,对应的EPR指令值将低于KOZ区域的上限,对应的发动机EPR指令值将会被冻结在KOZ区域的下限。
A320操作程序

A320操作程序推力调定起飞滑跑离地如果预选航向减推力加速起飞后“口令”“起飞后检查单线上部分“爬升速度-S -F 推力杆爬升位加速高度襟翼0过渡高度襟翼1推力调定V1 VR+15°Pitch抬轮减推力高度AP在离地5秒后可以接通(100 ft)PF“起飞” 。
.。
.下口令刹车OFF 推力手柄50%N1 如果侧风等于或低于20kt,并且没有顺风。
1)从IDLE 到50 % N1 (1.05EPR) 。
2) 从双发推力稳定到起飞推力推力调定PNFT.O LT/LDG LT。
..ON喊话50稳定方向控制用脚蹬计时开始计时开始PFFMA。
..。
.报出起飞滑跑PNFPFD/ND。
.。
..。
..检查N1。
.。
..检查在80 kt以前在100 kt时“检查”。
..报出“推力调定”。
报出PFD/发动机参数。
.。
..检查“100”。
.。
报出LimitLimitPFPNF相同的速度指示80 kt100 ktPF在V1时在VR 时抬轮。
.。
执行离地PNF“V1”。
.报出机长把手从推力手柄上移开“抬轮”。
..。
.。
.报出当有正上升率时“收轮”。
..。
.。
..下口令“正上升”。
...。
.。
报出起落架。
.。
.。
收上地面扰流板。
.。
.。
解除待命外部灯光。
..。
.。
..调定“轮收好”。
.。
..。
.。
.报出自动驾驶( AP1/2)。
..。
..。
..。
..按需FMA。
.。
报出AP 在离地后5秒可用(100 ft).+15°L/G UP VRV180 kt 100 ktPF当LVR CLB 在FMA 上闪烁时推力手柄。
.。
..爬升位减推力PNF一部空调组件(若关空调起飞)。
.。
...。
接通FMA。
.。
报出收轮VR减推力高度PF在加速高度加速PNFFMA。
.。
报出在F 速度且有正的速度趋势时“形态1”。
...。
...下口令证实/喊话。
.。
“速度检查”形态1。
..。
.选择在S 速度且有正的速度趋势时“形态0”。
...。
【空客A320培训PPT课件】自动飞行概述

MENU 系统概述
6/25
MCDU 1
Flight Control Unit
MCDU 2
导航信息 性能信息 ADIRS & GPS 时钟
无线电导航
自动飞行
FMGCs
FMGC 向 下 列 系 统 提 供 输 出 信息:
自动驾驶系统——用于俯仰 ,横滚和偏航控制
自动推力系统——用于推力 控制
EFIS(电子飞行仪表装置
MENU 系统概述
3/25
A320系列飞机自动飞行系统的计算和处理 功能由两台飞行管理制导计算机(FMGC)完 成。
这两台计算机是相同的,在正常情况下一起 工作。出于训练目的,我们将把这两部FMGC 作为一个整体集中讨论。
FMGC1 COMFPMUGTACTsIONFMGC2 &
PROCESSING
无线电导航信息。
FMGCs
MENU 系统概述
5/25
MCDU 1
Flight Control Unit INPUT DEVICES
MCDU 2
导航信息 性能信息 ADIRS & GPS 时钟
无线电导航
自动飞行
FMGCs
飞行员通过使用以下组件向FMGC输入 信息:
两个多功能控制和显示组件(MCDU) , 一个单一的飞行控制组件(FCU)。
AP2
FD2
MENU 系统概述
17/25
MCDU 1
Flight Control Unit
MCDU 2
FMGC1
FD1
AP1
自动飞行
FMGC2
AP2
FD2
MENU 系统概述
18/25
MCDU 1
A320机型 第22章自动飞行系统

22章重点1、FMGC、ELAC、惯导,哪个是AFS(自动飞行系统)的计算机?FMGC2、FCU(飞行控制组件)在遮光板上。
3、FMA(飞行方式指引)在PFD 顶部4、A320飞行系统核心计算机?FMGC5、自动飞行系统的FMGC(飞行管理指引计算机)装在电子舱MCDU(多功能控制显示组件)装在驾驶舱FCU装在驾驶舱遮光板上6、FMGC有2个FAC有2个FCU有1个,分为3部分FCU有两个通道7、自动飞行系统有2套自动推力有1套A/THR也有两个通道8、AP(自动驾驶)衔接电门在FCUA/THR(自动推力)衔接电门在FCU9、FE叫飞行包络保护,FEC叫飞行包络计算机,FE有2套10、FE的功能:风切变探测、alpha-floor包络保护11、包络保护功能在FAC12、自动飞行系统操纵时,飞机侧杆不动,油门杆也不动,但是脚蹬可能会动,因为脚蹬是钢索传动13、自动飞行系统的功能:自动操纵飞机各个舵面,自动完成推力的计算和改变,使飞机沿着预先设定的飞行计划飞行14、AFS(自动飞行系统)的故障探测隔离功能在:FIDS(故障隔离和探测系统)15、FMGC输出指令到AP,再由AP输出到ELAC,SEC和FAC,操纵各个舵面16、飞控计算机有ELAC(升降舵和副翼计算机)、FAC(飞机增稳计算机)、SEC(扰流板升降舵计算机)、FMGC(飞机管理指引计算机)17、AP推力载荷:在AP接通时,侧杆上会有推力载荷,即防止误操作,若施加一定的力,克服了负载会断开自动驾驶(同A/THR)18、自动推力输出推力给FADEC(全权限数字电子控制)19、自动推力切断方法:油门杆放入慢车位或者使用油门杆侧面的自动推力切断电门20、FMGC功能:(全选)21、FMGC功能分为FM和FG部分,FM主管飞行计划,FG主管飞行制导,FG的功能分为AP,FD,A/THR22、飞行计划的监控由FM(飞行管理)完成23、AP、FD、A/THR功能在FMGC实现24、着陆测试由FMGC完成,检查自动着陆的能力FMA上显示着陆能力的等级CAT 3 2 125、在进近过程中可以同时衔接2个AP,AP1为主,AP2热备份(同DIR)26、自动推力可以人工或自动脱开。
【空客A320培训PPT课件】自动飞行制导模式a

自动飞行
MENU 制导模式 (A)
3/54
在起飞前滑行时,注意在FMA上: CLB(爬升)方式以青蓝色显示表示待命;起飞阶段结束 后它将自动接通。
NAV(导航)方式以青蓝色显示表示待命;飞机离地后它 将自动接通。
1FD2表示两部飞行指引仪都接通(尽管由于在地面没有任 何方式接通,FD符号不显示)。
自动飞行
MENU 制导模式 (A)
6/54
PF:性能页面
FD的横向方式为RWY(跑道);FD垂直指令杆指令 偏航/横滚角度,它将使你在滑跑和初始爬升期间跟踪起 飞跑道航道信标。
如果在起飞时没有盲降系统可用,该区域显示空白。 注意:
1、在地面滑跑期间,FD垂直指令杆由偏航指令杆代 替,以便在低能见条件下帮助你滑跑。
在 FMA 上 , HDG( 航 向 ) 表 示 横 向导航现在由FCU航向选择器上所作 的选择控制。
自动飞行
MENU 制导模式 (A)
4/54
现在你将油门杆设置到灵活卡槽用于起飞。 FMA指示: MAN FLX 49(人工灵活49),表示现在完全是人工控制推 力并且灵活起飞推力已经设定。 自动推力系统待命,可以通过你在油门杆上的动作接通。
自动飞行
MENU 制导模式 (A)
5/54
FMA还指示: FD的垂直方式为SRS;FD水平指令杆指令一俯仰角 度,它将根据当时的条件,例如双发,单发……,使你 能以指定的基准速度V2飞行。SRS代表速度基准系统。
2/54
你计划飞行的SID(标准仪表离港)航路包括几个航路点上 的 一 些 高 度 限 制: 在 D086C上 为 +6 9 0英 尺 , 在 D164T上 为 FL60,在NERIN上为FL90。
A320-自动飞行系统

飞行指引(FD)
在两个主飞行显示器(PFD)上,FD指引杆显示制导指 令,这样飞行员可以根据FMGC的要求人工操纵飞机。
• 自动驾驶仪没有衔接 驾驶员根据在PFD上提供的FD指令跟踪要求的指令,即, 驾驶员通过人工操纵舵面跟踪这些指令。
• 自动驾驶仪衔接 驾驶员根据在PFD上的FD指令,监控自动驾驶仪指令执 行。
自动飞行系统概述—其它系统
AFS与大量的飞机系统相连接,与自动飞行系统 交换数据的系统,例如: ➢ 从大气数据惯性基准系统(ADIRS)接收飞机高度 和飞机姿态数据; ➢ 向升降舵和副翼计算机(ELACs)发送自动驾驶仪 指令。
飞行增稳计算机(FAC)
飞行增稳计算机(FAC)的基本功能是: ➢ 偏航阻尼器; ➢ 方向舵配平; ➢ 方向舵偏转角度限制;
自动驾驶AP
AP工作方式包括水平方式和垂直方式。 通常,每一种方式由驾驶员或系统选择。自动驾驶仪衔
接上时,同时进入一种水平方式和一种垂直方式。根 据不同的飞行阶段,水平方式控制: • 通过升降舵副翼计算机(ELAC)控制副翼; • 通过升降舵副翼计算机(ELAC)和扰流板升降舵计算 机(SEC)控制扰流板; • 通过飞行增稳计算机(FAC)控制方向舵; • 通过升降舵副翼计算机(ELAC)和刹车/控制组件 (BSCU)控制前起落架。
➢ 工作—有多种使用自动飞行系统的途径。正常的和推 荐的途径是自动飞行系统自动地跟踪飞行计划。知道 了飞机的实时位置和想要飞的(驾驶员选择的)飞行 计划,AFS能够计算出指令,并将指令发送至舵面和 发动机,以便飞机跟踪飞行计划。在自动飞行系统工 作中,驾驶员起着重要的监控作用。在AFS期间,侧 杆和推力杆不能够自动移动。
• 利用来自ADIRU、起落架控制和接口组件(LGCIU)、 FMGC和缝翼襟翼控制计算机(SFCC)的数据计算的 特性速度,并在PFD上显示。
A320动力装置系统概述

8/40
动力装置 (CFM)
MENU
系统概述
9/40
前风扇
动力装置 (CFM)
动力装置 (CFM)
MENU
系统概述
11/40
低压涡轮
前风扇,低压压气机,和低压涡轮连接形成低 速转子(N1)。
动力装置 (CFM)
MENU
系统概述
12/40
动力装置 (CFM)
动力装置 (CFM)
MENU
系统概述
33/40
动力装置 (CFM)
MENU
系统概述
34/40
每台发动机有一个火警和故障灯。 该面板将在正常和不正常操作模块中详细介绍。
动力装置 (CFM)
MENU
系统概述
35/40
动力装置 (CFM)
MENU
系统概述
36/40
顶板上还有一块面板用于人工启动。 你将在以后的人工启动模块中看到这块面板。
MENU
系统概述
17/40
动力装置 (CFM)
MENU
系统概述
18/40
燃烧室装有两个点火电嘴,A和B。
动力装置 (CFM)
MENU
系统概述
19/40
动力装置 (CFM)
MENU
系统概述
20/40
每台发动机装有一个全权限数字式发动机控制系统(FADEC),该系统提供全 部的发动机管理。 每个FADEC有两个相同且独立的通道,A和B。
动力装置 (CFM)
MENU
系统概述
37/40
动力装置 (CFM)
MENU
系统概述
38/40
这些控制器的指示都 显示在发动机 / 警告显示 器 和 ECAM 发 动 机 页 面 上。
A320系统知识普及帖之7-自动飞行系统之FMGC篇中

先介绍一下简单的FG部分吧。
FG有以下三种功能AP,FD,A/THR其中AP有两部,AP1和AP2分别来自于FMGC1 和FMGC2在起飞后5秒可以接通任意一部自动驾驶,比如说接通把杆飞行员一侧的AP,从功能上没有任何区别。
从爬升到进近前只能接通一部自动驾驶,AP1或AP2。
接通另一部时前一部会自动跳开。
在距离跑道头大约25海里时,飞行员可以通过FCU上的APPR按钮(此按钮的功能是让计算机开始搜索航向道和下滑道信号)在激活,之后接通第二部AP两部AP都接通后,由于程序销钉的缘故AP1有优先权控制系统,AP2做备份。
如果不飞三类进近,在飞机到达决断高度后,断开自动驾驶,目视着陆。
如果飞三类进近,可以通过AP系统自动接地。
这个在国外繁忙机场比较常见。
国内还没有三类的机场。
如果只有一部AP接通,发生故障后可以人工尝试接通另一部。
如果两部自动驾驶都接通时,AP1故障时AP2会自动接通。
FD飞行指引功能同样有两部,FD1显示在机长一侧,FD2显示在F/O一侧。
有两种显示模式十字架(HDG-V/S)和小鸟模式(TRK-FPA)空客推荐起飞用十字架,着陆时用小鸟模式。
如果一部故障,剩下的FD会给两边同时提供指引。
A/THR自动推力虽然也有两部但只有一部工作。
由主FMGC同时控制两台发动机。
如果一部失效。
另一部不会自动接替工作,需要人工切换FMGC的主从模式后人工接通。
下面谈一下三种功能的接通和断开方式。
AP只能人工接通。
AP断开可以通过以下方式。
1. 侧杆上的优先权选择按钮断开。
这是唯一一种正常的断开方式。
2,。
大力推动锁定在中立位的侧杆。
3.。
用方向舵踏板断开AP(超过正常配平10度以上)4.用THS的配平轮断开AP以上常见的断开方式中只有第一种是正常断开方式。
AP OFF 红色信息显示在上ECAM 的MEMO区,Master Warning light和音响警告在9秒后自动消失。
其余的几种方式都会被系统认定为故障断开。
「干货」A320飞行操纵系统
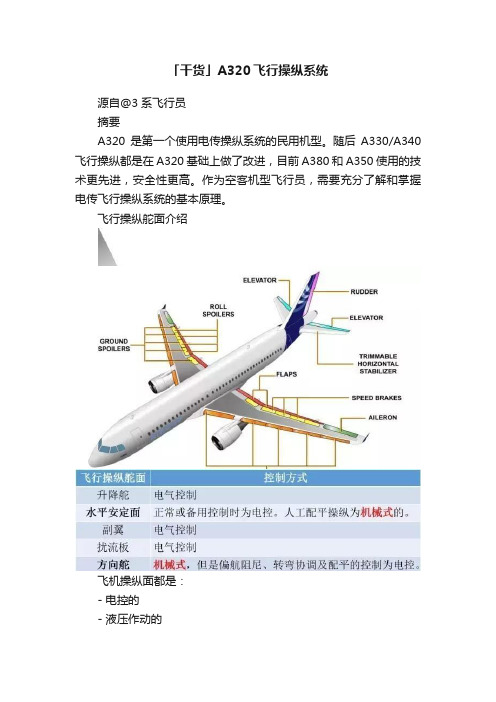
「干货」A320飞行操纵系统源自@3系飞行员摘要A320是第一个使用电传操纵系统的民用机型。
随后A330/A340飞行操纵都是在A320基础上做了改进,目前A380和A350使用的技术更先进,安全性更高。
作为空客机型飞行员,需要充分了解和掌握电传飞行操纵系统的基本原理。
飞行操纵舵面介绍飞机操纵面都是:‐ 电控的‐ 液压作动的水平安定面和方向舵可机械操纵。
侧杆用于控制飞机的俯仰及横滚(和偏航,间接通过转弯协调)。
计算机分析飞行员的输入,按需移动飞行操纵面,以完成飞行员要求的指令。
然而,在正常法则下,不论飞行员输入什么信息,计算机都将防止过度的机动飞行和超过俯仰和横滚轴安全包线的飞行。
但是,方向舵和传统飞机上的一样,不具备这种保护。
飞行操纵计算机介绍7个飞行操纵计算机根据正常、备用或直接法则处理飞行员和自动驾驶的输入,计算机有:2个 ELACs(升降舵副翼计算机)提供: 正常升降及安定面控制副翼的操纵。
3 个SECs(扰流板升降舵计算机)提供: 扰流板的操纵。
备用升降舵和安定面控制。
2 个FACs(飞行增稳计算机)提供: 方向舵电动控制。
另外的2个FCDC(飞行操纵数据集中器)从ELAC (升降舵副翼计算机)和 SEC (扰流板升降舵计算机)获得数据并将数据送至 EIS (电子仪表系统)和 CFDS (中央故障显示系统)。
*飞行操纵系统控制逻辑A320飞机所有操纵面都需要液压驱动控制(G/B/Y)。
并且每个飞行操纵计算机和液压作动筒之间有着默认的对应关系。
【表1】扰流板控制逻辑每块扰流板都由一个伺服传动装置来定位。
每个伺服传动接收分别来自于G、 B或Y液压系统的动力,由SEC1、2 或3 来控制。
当相应的计算机出现故障或失去电控时,扰流板自动收至0位。
在液压供给失效的情况下,扰流板保持在失效时的偏转位置,或如果在空气动力的推动下,保持在较小的位置。
当一个机翼上的扰流面失效时,另一个机翼上相对称的扰流板被抑制。
A320自动飞行系统FCU-飞行控制组件

自动飞行
MMEENNUU FCU
26/50
自动飞行
MENU FCU
27/50
航向-垂直速度/航迹-飞行航迹角(HDG-V/S/TRKFPA)按钮用来切换航向-垂直速度方式和航迹-飞行 航迹角方式。
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地指示 出了当前的选择。
我们将改变速度。
MMEENNUU FCU
15/50
自动飞行
MENU FCU
16/50
自动飞行
MENU FCU
17/50
我们从速度/马赫,或SPD/MACH,控制区域 开始学习。它包括: 一个窗口, 一个速度/马赫按钮,和 一个速度/马赫选择旋钮。
自动飞行
MMEENNUU FCU
18/50
速度/马赫选择器控制着几个功能。这与FCU 上的所有选择器一样。
让我们进一步看一下。
自动飞行
MMEENNUU FCU
19/50
转动: 改变速度
你可以通过转动选择旋钮在窗口中设置一个 速度。选择的速度显示在窗口中。
自动飞行
MMEENNUU FCU
20/50
如果按入旋钮,你在窗口中看到的短划线意 味着速度将随着预先计划的性能剖面自动变化 。
自动飞行
MMEENNUU FCU
1/50
我们现在详细地看一下飞行控制组件(FCU )的功能和控制器,这就是本模块的主题。
自动飞行
MMEENNUU FCU
2/50
速度/马赫
自动飞行
MENU FCU
3/50
速度/马赫
横向
自动飞行
MENU FCU
A320驾驶舱面板全解读,史上最详细!
A320驾驶舱⾯板全解读,史上最详细!◀凡⼼所向,素履所往,⽣如逆旅,⼀苇以航▶源⾃@安全飞机(ID:anquanfeiji)A320驾驶舱头顶板遮光板中央仪表板中央操纵台侧操纵台空调/增压/通风空调⾯板1.区域温度选择器‐12点钟位置:24°C(76°F)。
‐COLD(冷)位置:18°C(64°F)。
‐HOT(热)位置:30°C(86°F)。
2.热空⽓按钮ON:活门调节热空⽓压⼒。
OFF:活门关闭,配平空⽓活门关闭。
故障电路重置。
FAULT灯:当探测到管道过热,琥珀⾊FAULT(故障)灯亮,伴随着相应的ECAM警戒。
⼀旦管道温度达到 88°C(190°F)故障环路将探测到该过热状况。
活门和配平空⽓活门⾃动关闭。
当温度下降到70°C(158°F)且机组选择OFF时,FAULT灯熄灭。
3.组件按钮ON:将⾃动控制组件流量控制活门。
除下列情况外,活门打开:‐上游压⼒低于最⼩值。
‐压⽓机出⼝过热。
‐发动机起动顺序:1.当MODE选择器调到IGN(或CRK)位,如果交叉引⽓活门关闭,位于起动的发动机⼀侧的活门⽴即关闭。
2.在下列情况下,起动的发动机⼀侧的活门保持关闭(只要交叉引⽓活门关闭):‐MASTER电门设置在ON(或⼈⼯起动按钮设置在ON位),且‐起动活门打开,且‐N2<>注:如果发动机起动时交叉引⽓活门打开,两个组件流量控制活门关闭。
3.在地⾯时,推迟30s再打开活门,从⽽防⽌在再次起动发动机时出现额外的组件关闭循环。
‐按压了相关⼀侧发动机的⽕警按钮,‐选择了⽔上迫降。
OFF:组件流量控制活门关闭。
FAULT灯:当组件流量控制活门位置与所选位置不⼀致,或压缩机出⼝过热或组件出⼝过热时,琥珀⾊灯亮,并伴有ECAM警戒。
4.组件流量选择器‐允许旅客数量及外界状况(排烟,热或湿的条件)选择组件活门流量。
关于空客A320系列飞机滑行偏转原理与排故探讨
关于空客A320系列飞机滑行偏转原理与排故探讨空中客车A320系列飞机是一种常见的窄体喷气式客机,滑行偏转是指在出现滑行方向异常时,飞机自动偏离目标航线进行滑行的现象。
在A320飞机上,滑行偏转通常是由飞机的自动驾驶系统和导航系统共同控制的。
让我们了解一下A320飞机的滑行偏转原理。
A320飞机的自动驾驶系统包括自动推力控制系统(Autothrust)和自动导航系统(Autopilot)。
自动推力控制系统负责控制发动机的推力,以维持飞机在滑行过程中的速度和加速度。
自动导航系统则负责控制飞机的航向和航迹,以保持飞机在滑行过程中的航线方向。
当A320飞机在滑行过程中出现偏转时,自动驾驶系统会通过多种传感器(如惯性导航系统、GPS系统和地面导航系统)获得飞机当前的位置和航向信息。
然后,自动驾驶系统会与导航系统进行数据交换,分析并纠正飞机的滑行方向。
如果偏转情况较轻微,自动驾驶系统可以通过微调推力和舵面来纠正滑行方向。
如果偏转情况较严重,则自动导航系统会向飞行员提供警告并要求其采取控制措施。
尽管A320飞机的自动驾驶系统和导航系统具有高度的精确性和可靠性,滑行偏转问题仍然可能发生。
有几个常见的原因可能导致滑行偏转:飞机的自动驾驶系统和导航系统需要依赖地面基础设施和导航标志来提供准确的位置和航向信息。
如果地面设施和导航标志存在故障或缺失,那么飞机的滑行偏转问题可能会发生。
飞机的传感器系统也可能出现故障或误差。
惯性导航系统可能受到振动或温度变化的影响而产生误差,导致滑行方向偏转。
GPS系统也可能受到干扰或信号遮挡而失效,进一步导致滑行偏转的发生。
飞机的自动驾驶和导航系统也需要飞行员进行正确的操作和维护。
如果飞行员操作不当,例如错误设置自动导航系统的航向或航迹,那么滑行偏转问题也可能发生。
要排除滑行偏转问题,需要采取一系列的排故措施。
飞行员需要及时发现并报告滑行偏转问题,并尽快切换到手动控制模式。
飞行员需要检查飞机的传感器系统是否正常工作,并重新校准这些系统,以确保它们提供准确的位置和航向信息。
19-A320自动飞行系统飞行方式信号牌

我们已经知道FMGC的一个主要的输入设备是FCU。
良好的CRM要求用适当的输出信息验证所有输入信息。
几乎在所有情况下,当你在FCU上进行输入时,你应在PFD上检查你的动作,并且在大多数时候,你将在飞行方式信号牌(FMA )上进行验证。
FMA位于PFD的顶部。
让我们更为具体地讨论一下FMA。
正如你所看到的,FMA分成5栏。
推力推力垂直推力垂直横向推力垂直横向进近能力●第一栏显示推力。
自动推力的方式显示在这一栏,●第二栏显示自动驾驶仪和飞行指引仪的垂直方式,●第三栏显示自动驾驶仪和飞行指引仪的横滚方式,●第四栏给出自动飞行系统的进近能力,最后一栏显示飞行制导系统、自动驾驶仪、飞行指引仪和自动推力的接通状态。
推力垂直横向进近能力自动飞行飞行制导自动推力接通状态公共方式在特定的情况下,第二和第三栏合在一起显示一个单一的自动驾驶仪/飞行指引仪方式,该方式是横向和垂直所共有的方式。
这些方式称为公共方式,出现在进近和着陆期间。
你将在以后的模块中学到所有的方式。
FMA的每一栏中可显示三行。
我们先看一下最前面的三栏。
第一行显示飞行制导系统当前接通的方式:●在此例中,自动推力接通的是速度方式。
这意味着自动推力将管理推力以提供所需的速度或目标速度。
●垂直方式接通的是高度(ALT)方式。
这意味着自动驾驶仪/飞行指引仪将提供制导以保持高度。
●横向方式接通的是航向(HDG)方式。
这意味着自动驾驶仪/飞行指引仪将提供制导以保持航向。
注:颜色代码将在以后讨论管理制导和选择制导时解释。
第二行显示飞行制导系统待命的方式。
在所示的例子中,蓝色的G/S和LOC表示下滑道和航道信标截获方式已待命。
第三行显示提示和信息。
在此例中,”CHECK APP SEL”提醒我们检查所选择的进近。
注:有一些信息会跨栏显示。
现在我们看一下第四栏。
最后两栏中各行的逻辑与前三栏不同。
第四栏提供有关进近的信息。
前两行告诉我们自动飞行系统着陆能力为III类盲降进近:故障的积极保护方式(fail-active )(例如:3b类盲降)。
A320题库-自动飞行-飞行引导和飞行增稳

A320题库-自动飞行-飞行引导和飞行增稳1. 在管理的引导方式,旋转但不拔出选择旋钮,航向/航迹(HDG/TRK)和垂直速度/飞行航迹角(V/S /FPA)窗数字保持多少秒后,虚线重新出现?( B )A. 10秒B. 45秒C. 60秒2. 在管理的引导方式,旋转但不拔出选择旋钮,速度/马赫(SPD/MACH)窗数字保持多少秒后,虚线重新出现?( A )A. 10秒B. 45秒C. 60秒3. 在管理的引导方式,旋转但不拔出选择旋钮,高度窗数字保持多少秒后,虚线重新出现?( C )A. 10秒B. 45秒C. 不适用4. 低能量警告(SPEED)提醒飞行员飞机能量已经低于临界值,必须增大推力以通过俯仰控制恢复正的飞机飞行轨迹角,它在什么时候可用? ( C )A. 正常法则,形态2、3 和全时可用B. 在无线电高度100英尺到2000英尺之间C. 以上都对5. 关于能量圈(一个绿色的弧),指示以飞机位置为圆心指向当前的航迹线。
以下说法正确的是:( C )A. 在下降阶段选择 HDG 或 TRK方式后,显示在 ND上B. 表示以进近(VAPP)速度从飞机目前位置下降到目的地机场标高着陆所需距离,垂直剖面上所有的速度限制都已考虑在内C. 以上都对6. 飞行指引仪(FD)何时自动消失? ( C )A. 当垂直方式未接通或ROLL OUT(滑跑)方式接通时,FD俯仰指令杆消失;当水平方式未接通或者RWY(跑道)方式或ROLL OUT(滑跑) 方式接通时,FD横滚指令杆消失B. 当飞机仰角大于25度或俯角大于13度,或坡度超过45度时FD指令杆消失C. 以上都对7. 什么时候出现偏航杆指示?( C )A. 在起飞时的“跑道(RWY)”方式B. 着陆时的“拉平(FLARE)”方式,“滑跑(ROLLOUT)”方式C. 以上都对8. 若一个FD 失效或一个FMGC 不可用(例如1失效),FMA可能的显示为:( C )A. - FD 2B. - FD -C. 2 FD 29. 以下哪种情况下,俯仰指令杆(或飞行航迹矢量)会闪亮10 秒钟?( C )A. 如果ALT*方式失去,且FCU 的高度基准变化大于250英尺B. 当处于APPR 方式(下滑道*、下滑道、着陆、最后)时,FD 转换为V/S 方式(飞行员动作或垂直进近方式失去)C. 以上都对10. 在两部AP/FD 都已关断的情况下,接通一部AP或一个FD,指令杆:( A )A. 会闪亮10 秒钟B. 会持续闪亮C. 不会出现指令杆11. 返回到V/S方式5秒内若飞行员没有采取动作确认改变后的目标高度: ( C )A. 响起三声音响警告B. 带方框的白色的V/S(FPA)闪烁10秒C. 以上都对12. AP/FD的基本方式为: ( B )A. 俯仰和横滚B. 垂直速度和航向C. 高度和航向13. 使用ILS进近,何时可将两部自动驾驶都接通(一部工作,一部备用)?( C )A. 当飞机稳定在下滑道截获高度时B. 只要航道截获C. 当航向道/下滑道或滑跑或复飞方式预位或接通时14. 什么时候可以接通自动驾驶? ( C )A. 地面起动好发动机后B. 离地后至少5秒C. 离地后至少5秒且高度100英尺以上15 . 自动驾驶仪可以指令: ( C )A. 飞行操纵面控制俯仰,横滚和偏航B. 前轮的位置C. 以上都对16. 当两个FD 都断开时,能否使用AP?( C )A. 不能B. 能,只能粗劣保持接通时的状态C. 能,AP 可根据飞行员在FCU 上的选择,接通航向垂直速度方式或航迹飞行航迹角方式17. 在正常法则条件下,所有的保护可用时,自动驾驶仪会在下述哪种情况下断开?( C )A. 高速保护工作或迎角保护工作(达到保护+1)或方向舵脚蹬偏移超出配平范围10度B. 俯仰姿态超过向上25度或向下13度或坡度角大于45度C. 以上都对18. 在哪种情况下,进入着陆方式后,自动着陆红色警告闪亮?( C )A. 无线电高度低于200 英尺且飞机偏离量过大(航向道或下滑道)B. 两部AP或LOC或GS失效,或两部无线电高度表指示之差大于15 英尺C. 以上都对19. 不同飞行阶段出现的双飞行管理(FM)失效会有不同的后果,进近时航向道(LOC)和下滑道(G/S)接通,无线电高度低于多少英尺时,目标速度调定为预先记忆的VAPP值,而管理速度目标保持不变?( B )A. 1000B. 700C. 40020. 复飞时目标速度为:( A )A. 记忆的复飞速度,该速度为进近速度(VAPP)和起始复飞速度的较高值B. VAPP+10节,最大到+25节C. 1.23倍失速速度21. 在起飞和复飞时,FCU上的速度窗显示:( C )A. 机组人工输入的FCU速度且灯灭B. 机组人工输入的MCDU速度且灯灭C. 白色虚线和亮点:被FMGS自动使用的管理速度22. 在起飞前一直到多少英尺都可预调HDG/TRK? ( A )A. 30B. 40C. 5023. 飞机在跑道中心线上,准备起飞,如需预设航向233°: ( B )A. 拔出航向旋钮以解除导航方式预位,调233°并按入接通B. 转动航向旋钮,调233°,当ATC允许转到233°时拔出C. 转动航向旋钮,调233°并拔出接通24. 下降方式(DES)提供沿计算的下降剖面的管理垂直引导,以下说法哪种正确?( C )A. 该剖面的计算是从巡航飞行高度层“下降顶点”开始到“减速点”,在该点处开始减速,最终在最后下降轨迹上高于接地点1000 英尺时达到进近速度(VAPP)B. 如果飞机高于下降剖面,它的速度将朝着管理速度范围的上限增加。
a320人工推力控制技巧

a320人工推力控制技巧摘要:1.概述A320人工推力控制的重要性2.详细解析A320人工推力控制技巧a.飞行中的推力控制b.起降过程中的推力控制c.特殊情况进行推力控制3.人工推力控制对飞行安全的影响4.飞行员应具备的推力控制技能和素质5.总结:A320人工推力控制的实战应用与培训正文:随着航空工业的飞速发展,飞机自动化程度越来越高,飞行员在驾驶舱中所面临的挑战也日益严峻。
在众多飞行操控系统中,人工推力控制是飞行员必须熟练掌握的关键技巧。
本文将详细解析A320人工推力控制技巧,以期为飞行员提供实用的操作指南。
一、概述A320人工推力控制的重要性A320飞机采用先进的机载计算机系统,实现了自动推力控制。
然而,在某些特殊情况下,飞行员需要运用人工推力控制技巧,以确保飞行安全。
人工推力控制对于飞机的爬升、巡航、下降和着陆等阶段具有重要意义。
二、详细解析A320人工推力控制技巧1.飞行中的推力控制在飞行过程中,飞行员需要根据飞行计划、气象条件、飞机重量等因素,合理调整推力。
为了实现高效飞行,飞行员需掌握推力优化技巧,确保飞机在各种情况下都能保持良好的性能。
2.起降过程中的推力控制起降过程中,飞行员需对推力进行精确控制,以保证飞机平稳地起飞和着陆。
在起飞阶段,飞行员应根据飞机的重量、空气密度、温度等因素,适时增加推力,使飞机达到安全起飞速度。
在着陆阶段,飞行员需通过减小推力,使飞机平稳减速,并确保在跑道尽头安全停下。
3.特殊情况进行推力控制在遇到特殊情况进行飞行时,飞行员更需要运用人工推力控制技巧。
例如,在遇到风切变时,飞行员应及时调整推力,以保持飞机的稳定飞行。
在紧急情况下,飞行员应根据紧急情况的特点,迅速作出推力调整,确保飞机安全。
三、人工推力控制对飞行安全的影响人工推力控制是飞行员必备的技能,对飞行安全具有至关重要的影响。
掌握推力控制技巧的飞行员,能够在遇到紧急情况时,迅速作出反应,确保飞机的安全。
A320系统知识普及帖之8-从TAM公司飞机失事谈空客自动推力系统
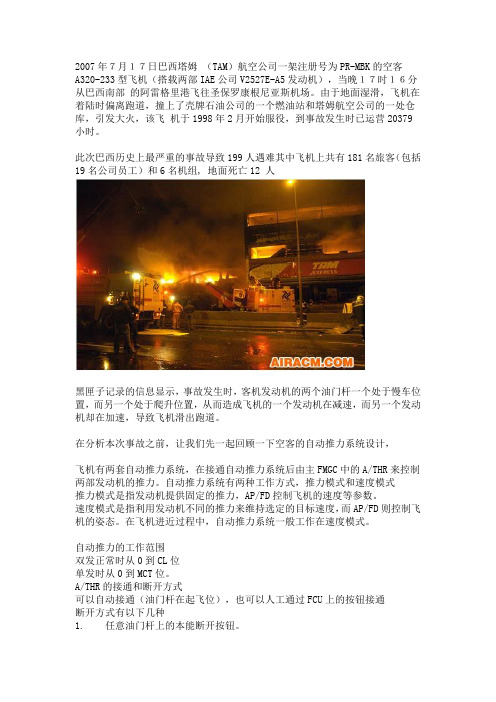
2007年7月17日巴西塔姆(TAM)航空公司一架注册号为PR-MBK的空客A320-233型飞机(搭载两部IAE公司V2527E-A5发动机),当晚17时16分从巴西南部的阿雷格里港飞往圣保罗康根尼亚斯机场。
由于地面湿滑,飞机在着陆时偏离跑道,撞上了壳牌石油公司的一个燃油站和塔姆航空公司的一处仓库,引发大火,该飞机于1998年2月开始服役,到事故发生时已运营20379小时。
此次巴西历史上最严重的事故导致199人遇难其中飞机上共有181名旅客(包括19名公司员工)和6名机组, 地面死亡12 人黑匣子记录的信息显示,事故发生时,客机发动机的两个油门杆一个处于慢车位置,而另一个处于爬升位置,从而造成飞机的一个发动机在减速,而另一个发动机却在加速,导致飞机滑出跑道。
在分析本次事故之前,让我们先一起回顾一下空客的自动推力系统设计,飞机有两套自动推力系统,在接通自动推力系统后由主FMGC中的A/THR来控制两部发动机的推力。
自动推力系统有两种工作方式,推力模式和速度模式推力模式是指发动机提供固定的推力,AP/FD控制飞机的速度等参数。
速度模式是指利用发动机不同的推力来维持选定的目标速度,而AP/FD则控制飞机的姿态。
在飞机进近过程中,自动推力系统一般工作在速度模式。
自动推力的工作范围双发正常时从0到CL位单发时从0到MCT位。
A/THR的接通和断开方式可以自动接通(油门杆在起飞位),也可以人工通过FCU上的按钮接通断开方式有以下几种1. 任意油门杆上的本能断开按钮。
2. 两个油门杆都拉回慢车位3. 通过FCU上的按钮断开。
4. 任意油门杆在反推位如果AP未接通,在飞机离地20英尺时,驾驶舱内会出现RETARD。
(收油门)的语音提示。
需要飞行员把油门杆拉回慢车位同时断开自动推力系统。
如果AP接通,在飞机离地10英尺时驾驶舱内会出现RETARD。
(收油门)的语音提示。
在这种情况下,因为AP的作用,会把油门自动收到慢车位,飞行员把油门杆放到慢车位只是确认推力慢车,并断开自动推力系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现在让我们来看一下飞行制导如何实现自动推力控制功能:即自动推力系统,或A/THR。
例如:最大爬升、慢车
例如:巡航、进近调节推力以保持目
标速度/马赫数自动推力可以以两种不同的方式工作:
●速度方式:自动推力不断调节推力以保持目标速度
或马赫,例如在巡航或进近期间。
●推力方式:自动推力设置指定的推力,例如最大爬
升推力或慢车推力。
速度方式固定推力
推力方式
轨迹速度/马赫目标速度方式推力方式自动推力方式自动与自动驾驶仪/飞行指引仪的垂直方式相联接:
●当自动驾驶仪/飞行指引仪的垂直方式控制轨迹,例如高度保
持方式,垂直速度方式,下滑道方式…时,自动推力处于速度
方式。
●当自动驾驶仪/飞行指引仪的垂直方式调节飞机姿态以保持目
标速度或马赫,例如爬升方式,下降方式…时,自动推力处于
推力方式。
飞行员主要使用油门杆控制自动推力。
在A320飞机上,自动推力在调节推力时不能逆向驱动油门杆。
让我们进一步看一下油门杆。
IDLE
CLIMB IDLE
FLEX/MCT
CLIMB
IDLE
TO/GA
FLEX/MCT
CLIMB
IDLE 当自动推力断开时,机组和平常一样通过在四分之一圆周内移动油
门杆来控制推力。
对于正推力,该四分之一圆周中有四个卡槽或制动点,它们是:
●慢车
●爬升,用于设置最大爬升推力
●灵活/MCT,用于设置起飞时的灵活推力或最大连续推力
●TO/GA,用于设置最大起飞或复飞推力
只有当油门杆设置在慢车卡槽以前时自动推力才能工作。
如果飞行员将油门杆设置在反推扇区中,自动推力不能工作。
当自动推力接通时,油门杆的位置确定了自动推力可以指令的最大推力。
例如,当使用速度方式加速时。
油门杆位置显示在“推力”表上,指示在正常操作中自动推力可使用的推力。
“推力”表将在发动机一章中讨论。
“推力”表推力杆位置
自动推力可用推力
断开
待命
接通
自动推力有三种状态。
包括:
●断开,或OFF
●待命,通过飞行员在油门杆上的特定动作可接通,或者●工作,或ON
现在我们正在向跑道滑行…
因为我们在地面上,自动推力必须断开。
FMA上没有自动推力的相关指示以及FCU上自动推力按钮灯熄灭都证实了这一点。
机组根据滑行的需要人工调节推力。
现在你获得了起飞许可。
把杆飞行员必须人工将油门杆设置到灵活或TOGA 卡槽以便开始起飞滑跑。
请单击油门杆以便开始起飞滑跑。
现在你获得了起飞许可。
把杆飞行员必须人工将油门杆设置到灵活或TOGA 卡槽以便开始起飞滑跑。
不对,单击油门杆以便开始起飞滑跑。
现在你获得了起飞许可。
把杆飞行员必须人工将油门杆设置到灵活或TOGA 卡槽以便开始起飞滑跑。
不对,单击油门杆以便开始起飞滑跑。
一旦油门杆被设置到TOGA卡槽,FMA就显示:
●蓝色的A/THR—表示自动推力待命,
●白色的MAN TOGA(人工起飞复飞)—表示油门杆设置在TOGA卡槽位,飞行员人工控制推力,。
注:TOGA是起飞时可用的最大推力。
同时,在FCU上,自动推力按钮灯亮为绿色。
自动推力待命意味着它可以由飞行员在油门杆上的动作接通。
注意当自动推力待命时,飞行员可用油门杆人工控制推力。
穿越减推力高度后,飞行员必须人工将油门杆设置到爬升卡槽。
在FMA上,闪亮的“LVR CLB”(油门杆爬升)提醒飞行员将油门杆收回到爬升卡槽。
现在设置爬升推力。
请单击油门杆以便设置爬升推力。
穿越减推力高度后,飞行员必须人工将油门杆设置到爬升卡槽。
在FMA上,闪亮的“LVR CLB”(油门杆爬升)提醒飞行员将油门杆收回到爬升卡槽。
现在设置爬升推力。
不对,单击油门杆以便设置爬升推力。
穿越减推力高度后,飞行员必须人工将油门杆设置到爬升卡槽。
在FMA上,闪亮的“LVR CLB”(油门杆爬升)提醒飞行员将油门杆收回到爬升卡槽。
现在设置爬升推力。
不对,单击油门杆以便设置爬升推力。
注意在FMA上:
●白色的A/THR—表示自动推力接通。
●绿色的THR CLB(推力爬升)—表示自动推力处于推力方式。
由于油门杆设置在爬升卡槽,并且自动驾驶仪指令爬升方式,因此自动推力指令推力爬升。
这些方式周围的白框强调在FMA上出现了方式的改变。
注意:1号自动驾驶仪的垂直方式调节俯仰以保持V2+10的目标速度。
在正常操作中,当自动推力接通时,在整个飞行过程中直到拉平,油门杆都停留在爬升卡槽。
自动推力系统在慢车和最大爬升之间按需调节推力。
注意自动推力系统不会逆向驱动油门杆,而是保持在爬升卡槽。
在任何时候,如果飞行员需要额外的推力,他可从爬升卡槽前推油门杆。
然后他将人工控制推力。
当飞机到达目标高度时,自动驾驶仪/飞行指引仪进入高度方式;自动推力转换到速度方式,这将在FMA上指示出来。
在这种方式中,自动推力系统不断调节推力以便保持目标速度。
当自动驾驶仪/飞行指引仪的垂直方式为垂直速度或飞行航迹角方式、下滑道方式时,以及通常在进近期间,自动推力也处于速度方式。
现在我们正在进近,即将要拉平。
你在自动推力接通的情况下人工飞行。
注意自动推力处于速度方式。
在人工拉平时,飞行员必须减小推力以便着陆。
他通过在大约20英尺处将油门杆拉回到慢车位来减小推力。
注意:如果他不这样做,自动推力将增加推力以保持速度。
在大约20英尺处会出现“RETARD”(收油门)的自动呼叫,以提醒飞行员收油门。
请单击油门杆以便将它们设置到慢车位。
注意自动推力处于速度方式。
在人工拉平时,飞行员必须减小推力以便着陆。
他通过在大约20英尺处将油门杆拉回到慢车位来减小推力。
注意:如果他不这样做,自动推力将增加推力以保持速度。
在大约20英尺处会出现“RETARD”(收油门)的自动呼叫,以提醒飞行员收油门。
不对,单击油门杆以便将它们设置到慢车位。
注意自动推力处于速度方式。
在人工拉平时,飞行员必须减小推力以便着陆。
他通过在大约20英尺处将油门杆拉回到慢车位来减小推力。
注意:如果他不这样做,自动推力将增加推力以保持速度。
在大约20英尺处会出现“RETARD”(收油门)的自动呼叫,以提醒飞行员收油门。
不对,单击油门杆以便将它们设置到慢车位。
现在油门杆设置到了慢车位。
这断开自动推力。
注意:
●在FMA上,不再显示白色的A/THR。
●FMA自动推力一栏变成空白。
●在FCU上,自动推力按钮灯熄灭。
我们刚刚看了断开自动推力的一种方法,就是通过将油门杆拉回到慢车位。
断开自动推力的另一种方法是通过按下油门杆上的任一个自动推力脱开按钮。
你将在模拟机上学习接通和断开自动推力的程序。
注意:按下一个按钮超过15秒钟将在剩余的飞行中抑制自动推力的使用。
当飞行中自动推力断开时,在油门杆处于或低于爬升
卡槽时按下FCU上的自动推力按钮就可再次接通自动推
力。
注意:你可以通过按下FCU上的自动推力按钮来断开
自动推力,但这不是建议的标准程序。
本单元已完成
主题列表
EXIT GLOSSARY AUDIO
FCOM RETURN 概况
推力手柄
断开/收回
工作方式。