Arduino 教程--第四十二课 Arduino 伺服电机
Arduino教程--第四十一课Arduino直流电机

第四十一课Arduino 直流电机在本章中,我们将使用Arduino板〔UNO〕连接不同类型的电机,并向你展示如何连接电机并从电路板上驱动它。
有三种不同类型的电机:•DC motor 直流电机•Servo motor 伺服电机•Stepper motor 步进电机直流电机〔DC—Direct Current motor〕是最常见的电机类型。
直流电动机通常只有两个引线,一个正极和一个负极。
如果将这两根引线直接连接到电池,电机将旋转。
如果切换引线,电机将以相反的方向旋转。
警告 - 不要直接从Arduino板引脚驱动电机。
这可能会损坏电路板。
使用驱动电路或IC。
我们将本章分为三个局部:•只让你的电机旋转•控制电机速度•控制直流电机的旋转方向必需的组件你将需要以下组件:•1x Arduino UNO 板•1x PN2222 晶体管•1x 小型6V直流电机•1x 1N4001二极管•1x 270Ω电阻程序按照电路图进展连接,如如下图所示。
预防措施进展连接时,请采取以下预防措施:•首先,确保晶体管以正确的方式连接。
如下列图,晶体管的扁平面应该面向Arduino 板。
•其次,根据图像中所示的排列,二极管的条纹端应朝向+5V电源线。
Arduino旋转控制代码int motorPin = 3;void setup() {}void loop() {digitalWrite(motorPin, HIGH);}代码说明晶体管就像一个开关,控制电机的功率。
Arduino引脚3用于打开和关闭晶体管,并在草图中命名为“motorPin〞。
结果当Arduino引脚3变为高电平时,电机将全速旋转。
电机速度控制以下是连接到Arduino板的直流电机的原理图。
Arduino代码int motorPin = 9;void setup() {pinMode(motorPin, OUTPUT);Serial.begin(9600);while (! Serial);Serial.println("Speed 0 to 255");}void loop() {if (Serial.available()) {int speed = Serial.parseInt();if (speed >= 0 && speed <= 255) {analogWrite(motorPin, speed);}}}代码说明晶体管就像一个开关,控制电机的功率。
Arduino教程——旋转编码器

Arduino教程——旋转编码器1. 所需的材料旋转编码器(KY-040)Arduino UNO开发板字符型图形点阵液晶1602电位器10k⾯包板2. 连接导线旋转编码器是如何⼯作的?旋转编码器是⼀种机电换能器,意味着它将机械运动转换为电⼦脉冲。
它由旋钮组成,当旋转时,旋钮将逐步移动并产⽣⼀系列脉冲序列,每个步骤具有预定义的宽度。
有许多类型的编码器,每个编码器都有⾃⼰的⼯作机制,稍后我们将了解这些类型,但现在让我们只关注KY040增量编码器,因为我们将它⽤于我们的教程。
编码器的内部机械结构如下所⽰。
它基本上由圆盘(灰⾊)和放置在该圆盘顶部的导电垫(铜⾊)组成。
这些导电焊盘以相同的距离放置,如下所⽰。
输出引脚固定在该圆盘的顶部,这样当旋钮旋转时,导电垫与输出引脚接触。
这⾥有两个输出引脚,输出A和输出B,如下图所⽰。
输出引脚A和输出B产⽣的输出波形分别以蓝⾊和绿⾊显⽰。
当导电焊盘直接位于引脚下⽅时,它会变⾼,导致导通时间,当导电焊盘移开时,引脚变低,导致上⾯所⽰波形的关闭时间。
现在,如果我们计算脉冲数,我们将能够确定编码器移动了多少步。
现在可能会出现这样的问题:当⼀个脉冲信号⾜以计算旋转旋钮时所采取的步数时,为什么我们需要两个脉冲信号。
这是因为我们需要确定旋钮旋转的⽅向。
如果您看⼀下这两个脉冲,您会注意到它们都是90°异相。
因此,当顺时针旋转旋钮时,输出A将⾸先变⾼,当旋钮逆时针旋转时,输出B将⾸先变⾼。
3. 旋转编码器的类型市场上有很多种类型的旋转编码器,设计⼯程师可以根据⾃⼰的应⽤选择⼀种。
最常见的类型如下所⽰增量编码器绝对值编码器磁编码器光学编码器激光编码器这些编码器基于输出信号和传感技术进⾏分类,增量编码器和绝对值编码器基于输出信号进⾏分类,磁、光和激光编码器基于传感技术进⾏分类。
这⾥使⽤的编码器是增量型编码器。
4. KY-040旋转编码器引脚和说明KY-040增量式旋转编码器的引脚分布如下所⽰前两个引脚(接地和Vcc)⽤于为编码器供电,通常使⽤+ 5V电源。
用Arduino制作一个迷你的爬墙机器人
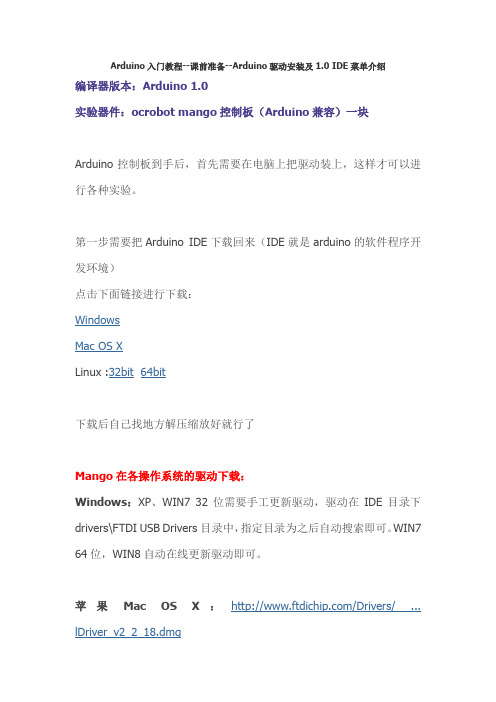
用Arduino制作一个迷你的爬墙机器人用Arduino制作一个迷你的爬墙机器人创客迷 11-19 19:09 大1工具和材料一些不易弯曲的硬线绝缘胶布线硬板纸胶棒热胶枪剪刀剪钳(绞线的那个)2.2K欧姆电阻*410K欧姆电阻100欧姆电阻Arduino Mini(单片机)伺服电机*2磁铁片*61个RGB LED灯1个轻型的电池2 使伺服电机连续运转之入门篇把固定它的壳子打开,对每个伺服机做简单修改就能得到我们需要的连续转动,先撬开壳子。
把妨碍转动的壳子剪掉,这样电位计就能一直获得连续信号。
这个黑色的部分是用来让它转了180度后停止的,看见没?两个黑色塑料小片儿。
取下齿轮把黑色壳子上的线剪下(下一个大步会告诉你怎么处理它们)。
把挡着连续转动的小塑料片儿剪掉。
3 使伺服电机连续转动之进阶篇现在,电位计已被成功调戏~(≧≦)/~,她一直采集连续信号。
从黑壳子上剪出红色,绿色和黄色的线(这个应当在上一步就做好了)。
绿色的线和黄色线之间焊个2.2K的电阻在红色和黄色的线之间也焊个2.2K的电阻4 反向设置在相同模拟信号下,伺服机的转向一般是相同的。
他们对称安装在小W上,但是要让一个反向怎么办?在硬件和软件上都可以解决(我用硬件做的,因为我是代码懒人,摔!)。
剪下电机到电机板子上的红色和蓝色的线。
焊接红线到蓝线,然后蓝线到红线(头晕了吧?其实就是像图上那样交叉一下)。
5 组装电机这步很容易嘿!尽可能温柔滴把线塞到伺服机壳子里面,然后把齿轮装配好。
可是捏,我加了电阻后,以前的壳子就不合适了,所以我用绝缘胶布把他们缠在一块儿的。
6 齿轮上阵怎么附上去呢?我用的热胶,其实任何粘性强的玩意儿都可以使,先剪两根1英寸长的硬线。
把每根线用热胶粘在伺服机顶部的齿轮里面。
线要对半,露一半出来!在每根线的末端粘3个磁盘。
磁盘也必须是对准中心!7 伺服机与单片机对接我用PIN 9和 PIN 10来驱动电机。
Pin 9 -伺服机1的橙线。
伺服电机讲解2讲课文档

中山少微自动化科技有限公司
2 伺服电机基本结构及原理
2.1 结构
交流电机
交流电机 电源线
编码器
现在十二页,总共五十五页。
编码器信
号输出线
中山少微自动化科技有限公司
2 伺服电机基本结构及原理
结构
交流电机
机械负载轴
现在十三页,总共五十五页。
减速齿轮
中山少微自动化科技有限公司
2 伺服电机基本结构及原理
ic Im sint
if Im sint 90
if Ic
组的电流UC相位上彼此相
差900幅值彼此相等,这样
的两个电流称为两相对称
电流,用数学式表示为
现在二十二页,总共五十五页。
中山少微自动化科技有限公司
3.1旋转磁场的产生
控制绕组
励磁绕组
UF1
UC1
UC2
UF2
当两相对称电流通入两相对称绕组时,在电机内就产生一个旋 转磁场。当电流变化一个周期时,旋转磁场在空间转了一中山少微圈自动化。科技有限公司
交流伺服电机驱动器
图 2-2 交流伺服电机系统接线示意图 现在三十七页,总共五十五页。
中山少微自动化科技有限公司
5.3交流伺服电机系统应用
5.3.1交流伺服电机系统结构
PC机
运动控制器
I/O 电 数据信号 路
速度信号 DAC 0/1
Pulse 0/1
使能信号
DO 21/22
P9-0/2
驱 控制
电压
表示的是一台两极的电机,即极对数P=1。对两极电机而言,
电流每变化一个周期,磁场旋转一圈,因而当
电源频率f=400 Hs,即每秒变化400个周期时,磁场每秒应当
arduino驱动步进电机小实例

Arduino驱动步进电机小实例本文介绍了使用Arduino UNO R3开发板驱动五线四相步进电机的原理与方法,其中包括用最基本单个引脚写入和调用内部库函数两种方法。
准备阶段:Arduino UNO R3开发板Arduino是一块基于开放原始代码的Simple i/o平台,并且具有开发语言和开发环境都很简单、易理解的特点。
让您可以快速使用Arduino做出有趣的东西。
它是一个能够用来感应和控制现实物理世界的一套工具。
它由一个基于单片机并且开放源码的硬件平台,和一套为Arduino板编写程序的开发环境组成。
Arduino可以用来开发交互产品,比如它可以读取大量的开关和传感器信号,并且可以控制各式各样的电灯、电机和其他物理设备。
Arduino项目可以是单独的,也可以在运行时和你电脑中运行的程序(例如:Flash,Processing,MaxMSP)进行通讯。
ULN2003驱动板ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。
可直接驱动继电器等负载。
ULN2003芯片引脚五线四相步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
注意图中5条线的颜色:蓝、粉、黄、橙、红,这个顺序很重要接线指示图各模块之间的连接接线图调试阶段:方法一:单个引脚写入// 引脚定义const int pinsCount = 4; // 所用引脚个数int Pins[] = { 8,9,10, 11, }; // 对应的引脚void setup() {// 循环设置,把对应的引脚都设置成输出for (int thisPin = 0; thisPin < pinsCount; thisPin++) { pinMode(Pins[thisPin], OUTPUT);}}void loop() {for (int num = 0; num < 4; num++) {digitalWrite(Pins[num], HIGH);delay(20);digitalWrite(Pins[num], LOW);// 这样就让4个引脚循环输出高电平了 }}方法二:调用内部库函数#include <Stepper.h>// 将此更改为您的电机上的步骤数#define STEPS 512// 定义引脚的连接Stepper stepper(STEPS, 8, 10, 9, 11);//上一次的读取模拟量int previous = 0;//初始化电机转动速度void setup(){stepper.setSpeed(10);}//主循环void loop(){// 读取AD值,在LY-51S可以直接通过电位器调节int val = analogRead(0);// 把速度设置为这次和上次读取的差值stepper.step(val - previous);// 记下这次读取值,方便下次比较previous = val;}参考文献柯博文. Arduino 完全实战. 电子工业出版社. 2016.1(美)艾戈(Tom Lgoe). 创意圣经. 人民邮电出版社. 2015.3作者简介王丰岳,1996 年生,男,山东省济宁市微山县,车辆工程 2015 级本科生,山东建筑大学锐思大学生科技实验室与校 DIY 电子科技协会会员。
Arduino入门教程
Arduino入门教程--课前准备--Arduino驱动安装及1.0 IDE菜单介绍编译器版本:Arduino 1.0实验器件:ocrobot mango控制板(Arduino兼容)一块Arduino控制板到手后,首先需要在电脑上把驱动装上,这样才可以进行各种实验。
第一步需要把Arduino IDE下载回来(IDE就是arduino的软件程序开发环境)点击下面链接进行下载:下载后自己找地方解压缩放好就行了Mango在各操作系统的驱动下载:Windows:XP、WIN7 32位需要手工更新驱动,驱动在IDE目录下drivers\FTDI USB Drivers目录中,指定目录为之后自动搜索即可。
WIN7 64位,WIN8自动在线更新驱动即可。
Linux:Ubuntu下自动识别驱动,使用管理员权限启动IDE即可识别到端口。
然后将买回来的arduino拆了包装,使用方头usb数据线连接到电脑,本文以win7 32位为例,会出现识别到新硬件显示。
然后会开始查找系统内驱动。
如果没有找到驱动,会显示这个画面。
这时,需要在开始菜单,“计算机”上面点右键,点“属性”。
然后点击设备管理会看到打了感叹号的未识别硬件在未识别硬件上点右键,点击“属性”,选择更新驱动程序软件。
选择浏览计算机以查找驱动程序软件然后目录选择你下载好的arduino1.0所在目录的drivers目录注意,如果您的计算机提示无法找到驱动,需要将目录进一步定位到\drivers\FTDI USB Drivers即可点击下一步,就可以安装好驱动了。
安装好驱动后,就可以显示是COM几端口,我这里显示的是COM14端口。
========分割线下面为扩展阅读========接着我们介绍下Arduino的IDE界面,以Arduino 1.0 IDE为例,首先进入软件目录。
然后就可以看到arduino.exe文件,双击打开IDE。
首先映入眼帘的是下图的界面,工具栏按钮功能依次为“编译”--“上传”--“新建程序”--“打开程序”--“保存程序”--“串口监视器”菜单栏上,首先看File菜单~介绍如下:接下来看Edit菜单~介绍如下:Sketch菜单介绍Tools菜单介绍结尾来一个MANGO的介绍图Arduino入门教程--第一课--板载LED闪烁实验编译器版本:Arduino 1.0arduino上有一个名称为L的led发光二级管,这个led其实是连接在13号引脚上的,所以我们通过控制13号引脚就能够控制此led灯闪烁。
利用Arduino 驱动舵机(附带程序)
学习利用Arduino 驱动舵机(附带程序)2012-6-30 00:27|发布者: sonxun|查看: 1180|评论: 0摘要: 什么是伺服电机?想象一下有一个小电机连接到一个可调电阻器。
一个电动脉冲或者命令被发送到电机之后,电机旋转到匹配指定的电位值的角度。
嗯,那样说听起来有点难以理解。
一个更简单的解释是:伺服电机,就是一个可 ... 什么是伺服电机?想象一下有一个小电机连接到一个可调电阻器。
一个电动脉冲或者命令被发送到电机之后,电机旋转到匹配指定的电位值的角度。
嗯,那样说听起来有点难以理解。
一个更简单的解释是:伺服电机,就是一个可以被指定旋转到一个特定的角度的电动马达。
例如,它通常可以用来控制遥控汽车的转向系统。
在这里,我们要再次感谢Arduino和朋友们,要使用一个伺服电机是很容易的,它可以让你创造出富有想象力的设计,唯一的局限就只有你的时间和资金了。
当你想要使用伺服电机时,需要考虑一些因素,包括:•旋转范围,指的是电机可以旋转的角度的范围。
例如 180 度或者 360 度(全旋),等等。
•旋转速度(通常以旋转每一度所花费的时间来衡量)。
•扭矩,伺服电机能够产生的扭矩 (旋转的力量)。
•在负载的状态下的电流大小。
•重量、成本以及其他因素。
脑海中首先想到的一个问题就是“哇——我能够同时使用多少个电机呢?”答案是……在duemilanove上,可以使用12个;在arduino mega上,可以使用48 个(哇)。
请注意当你使用伺服电机函数库时,你不能在第9和第10端口上使用analogWrite(); 函数。
你可以在 arduino 伺服电机函数库页面找到更多的细节。
在今天的例子和练习中,我使用了Turnigy TG9伺服电机。
它相当的便宜,而且重量轻,非常适合演示实验,这款电机也经常被用于遥控飞机。
它的旋转范围是180度。
(它真的非常便宜)我希望你注意到伺服电机上一共有三根导线。
一根是 +5V 电源,一根是 GND 接地,另一根是控制信号——连接到arduino的一个数字输出端口上。
Arduino入门版使用教程

Arduino入门版使用教程i目录介绍篇 ........................................................................ . (1)一、Arduino 基础套装介绍 (2)1、什麽是Arduino 基础套装 (2)2、元件清单 ........................................................................ (2)二、Arduino 介绍 ........................................................................ (4)1、什麽是Arduino ................................................................... . (4)2、特色描述 ........................................................................ (4)3、性能描述 ........................................................................ (4)三、Arduino C 语言介绍 ........................................................................ .. 61、关键字和符号 ........................................................................ .. (6)2、结构 ........................................................................ .. (9)3、功能 ........................................................................ (9)四、Arduino 使用介绍 ........................................................................ . (11)1、准备好你的Arduino板 (11)2、下载Arduino 开发环境 (13)3、安装USB 驱动 ........................................................................ . (13)4、连接LED 灯电路 ........................................................................ .. (17)5、打开arduino 开发环境 (18)6、打开已有程式 ........................................................................ . (19)7、编译程式 ........................................................................ . (20)8、下载程式 ........................................................................ . (23)五、面包板使用介绍 ........................................................................ .. (30)1、面包板介绍 ........................................................................ . (30)2、面包板的使用 ........................................................................ (30)ii实验篇 ........................................................................ .. (34)第一节多彩led 灯实验 ........................................................................ .. 35一、发光二极管介绍 ........................................................................ .. (35)二、简单的控制一个led 灯的闪烁实验 (39)三、广告灯效果实验 ........................................................................ .. (41)第二节蜂鸣器实验 ........................................................................ (48)一、蜂鸣器介绍 ........................................................................ .. (48)二、蜂鸣器模拟救护车警笛声音实验 (50)第三节数码管实验 ........................................................................ (54)一、数码管介绍 ........................................................................ (54)二、数码管显示数字的实验 (56)第四节按键实验 ........................................................................ (63)一、按键介绍 ........................................................................ (63)二、按键控制led 等亮灭实验 (65)三、掷骰子实验 ........................................................................ (67)第五节倾斜开关实验 ........................................................................ (74)一、倾斜开关介绍 ........................................................................ (74)二、倾斜开关控制led 灯的亮灭 (75)第六节光控声音实验 ........................................................................ (79)一、光敏电阻介绍 ........................................................................ (79)二、光控声音实验 ........................................................................ (80)第七节火焰报警实验 ........................................................................ (84)一、火焰传感器介绍 ........................................................................ (84)二、火焰报警实验 ........................................................................ (85)第八节抢答器实验 ........................................................................ (90)第九节温度报警实验 ........................................................................ (98)一、温度传感器介绍 ........................................................................ (98)iii二、温度报警实验 ........................................................................ (99)第十节红外遥控 ........................................................................ . (103)一、红外接收头介绍 ........................................................................ . (103)二、红外遥控实验 ........................................................................ . (104)介绍篇一、Arduino 基础套装介绍1、什麽是Arduino基础套装Arduino基础套装是精心为初学者设计的一款学习工具。
arduino 运行伺服电机 独立电源 问题

arduino 运行伺服电机独立电源问题Arduino 运行伺服电机独立电源问题问题1: 为什么需要使用独立电源驱动伺服电机?•问题描述: 伺服电机通常需要较高的电流供应,并且具有较高的功耗。
Arduino 微控制器板上的电源通常只能提供较低的电流输出。
因此,当使用 Arduino 控制伺服电机时,需要额外的独立电源来提供足够的电流。
•解释说明: 由于Arduino微控制器板的电源输出有限,无法满足伺服电机的高功耗需求,仅通过Arduino供电往往导致电机运行不稳定或无法正常工作。
因此,需要使用独立电源来为伺服电机提供充足的电流,以确保其正常运行。
问题2: 如何选择适合的独立电源?•问题描述: 当选择独立电源来驱动伺服电机时,需要考虑以下因素:1.电压要求:伺服电机通常有特定的电源电压要求,需要选择电压输出与电机要求相匹配的电源;2.电流输出:根据伺服电机的额定电流和峰值电流,选择独立电源能够提供足够电流输出的电源;3.稳定性:独立电源应具备稳定的输出电压和电流,以确保伺服电机的正常工作;4.可靠性和安全性:选择品牌可靠、具有过载保护和过压保护功能的电源,以确保长时间稳定工作和防止电机损坏;•解释说明: 选择适合的独立电源是确保伺服电机能够稳定运行的关键。
通过考虑伺服电机的电压和电流需求,选择一个稳定可靠、安全保护的电源是必要的。
问题3: 如何连接独立电源和Arduino与伺服电机?•问题描述: 若要使用独立电源驱动伺服电机,需要正确连接电源和Arduino与电机之间的电路。
1.连接电源:将独立电源的正极和负极正确连接到伺服电机上,确保极性正确,以避免电机损坏。
2.连接Arduino:使用驱动电机的扩展板或模块,连接Arduino的PWM引脚和地线,以实现控制信号的传递。
3.线序连接:根据伺服电机的接线顺序,将电机的控制信号线连接到正确的Arduino引脚上,以确保控制信号的准确传递。
•解释说明: 正确连接独立电源、Arduino和伺服电机是保证驱动系统正常工作的前提。
Arduino机器人制作入门教程
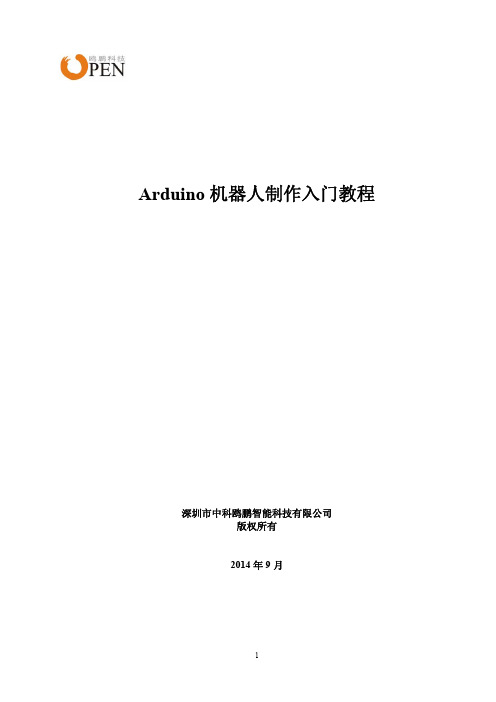
图 1.15:安装电池盒图 2 步骤 5:安装万向轮
4
C5
Arduino 机器人制作入门教程
图 1.16 万向轮安装后的后视效果图
(1)完成组装步骤 5 所需零件: 1)12mm 铜螺柱:4 个 2)M3*6 圆头螺钉:8 颗 3)万向轮:1 个 (2)组装说明 1)首先用 4 颗 M3*6 圆头螺钉 将 4 个 12mm 铜螺柱安装到万向轮 上。 2) 再把万向轮安装于底盘的尾 部, 安装方法如图 1.16 和图 1.17 所示。 3)到此机器人底盘便组装完 毕, 图 1.18 所示为组装完毕的机 器人底盘整体效果图。
2
C5
Arduino 机器人制作入门教程
第一章
1
Arduino 教学机器人硬件组装和编程入门
本体组装
本节将指导你组装 Arduino 教学机器人,必须依照每个组装步骤说明仔细组装。
1.1 组装工具
图 1.1 所示的工具是比较通用的工具,一般家庭或学校都有,在一些五金商店也可以买到。在 与书本配套的机器人套件中已经配有此套工具。
1、尖嘴钳
2、螺丝刀
图 1.1 机器人组装工具
1.2 安装机器人底盘零件
零件列表分为 4 类:金属杆件,螺钉与铜螺柱,万向轮,电机套件与电池盒。
金属杆件名称及数量
A) 1*1 金属转弯件:2 个 B)2*2 转弯件:4 个 C) 1*5 金属杆件:2 个 D) 开槽金属杆件: 2 个 E) 2*10 金属杆件:2 个
步骤 1:组装机器人车体
2
C5
Arduino 机器人制作入门教程
图 1.7 步骤 1 组装后的效果图 2 步骤 2:组装机器人电机安装支架 (1)完成组装步骤 2 所需零件: 1)1*1 金属转弯件:2 个 2)2*2 金属转弯件:4 个 3)开槽金属杆件:1 个 4)M3*6 圆头螺钉 :10 颗 图 1.8 组装后的前方效果图 (2)组装说明 1) 组装方式参照图 1.8、 图 1.9 和图 1.10。 2) 先按照图 1.8 和图 1.9 将 4 个 2*2 金属 转弯件安装于底盘前部的两侧,用于固定伺 服电机。再按图 1.10 用 2 个 1*1 金属转弯 件将开槽金属杆件固定于前部,用于安装传 感器或者其它工具。
ARDUINO教程PPT课件

该函数的作用是设置引脚的输出电压为 高电平或低电平。该函数也是一个无返 回值的函数。
Pin参数表示所要设置的引脚,value参 数表示输出的电压HIGH(高电平)或 LOW(低电平)。
注意:使用前必须先用pinMode设置。
.
5
3、digitalRead(pin)
该函数在引脚设置为输入的情况下,可 以获取引脚的电压情况HIGH(高电平) 或者LOW第电平。
Arduino基础教程 ——基本函数的使用
.
1
一、数字I/O口的操作函数
1、pinMode(pin,mode); 2、digitalWrite(pin,value); 3、digitalRead(pin);
.
2
1、pinMode(pin,mode)
pinMode函数用以配置引脚与输出或输 入模式,它是一个无返回值函数。函数 有两个参数,pin和mode。Pin参数表示 要配置的引脚,mode参数表示设置的 参数INPUT(输入)和OUTPUT(输 出)。
能得到0~255的区间值 }
.
13
三、高级I/O
Pulseln(pin,state,timeout)
该函数用于读取引脚脉冲的时间长度, 脉冲可以是HIGH或者LOW。如果是 HIGH,函数将先等引脚变为高电平,然 后开始计时,一直到变为低电平。
返回脉冲持续的时间长度,单位为ms. 如果超时没有读到的话,返回0.
if(count!=0)
{ Serial.println(count,DEC);
count=0;
}
}
.
16
四、时间函数
1、delay(ms); 2、delayMicroseconds(us); 3、millis(); 4、micros();
2024版伺服电机三步学习法让你快速掌握PLC

安全规范
遵循电气安全规范,确保 在断电情况下进行接线操 作。
初始化过程详解
初始化步骤
熟悉伺服电机的初始化过 程,包括设置驱动器参数、 进行编码器校准等。
故障排查
掌握初始化过程中可能出 现的故障及排查方法,如 编码器故障、驱动器报警 等。
优化调整
在初始化完成后,根据实 际需求对伺服电机进行优 化调整,提高运动性能。
特点介绍
直流伺服电机具有响应速度快、控制精度高等特点;交流伺服 电机则具有结构简单、维护方便、高效率、高功率因数等优点。 不同类型的伺服电机适用于不同的应用场景,需要根据实际需 求进行选择。
02
第一步:了解பைடு நூலகம்服电机基本操作
伺服电机选型与参数设置指导
选型原则
根据负载类型、转速范围、定位精度 等要求选择合适的伺服电机型号。
指令表编程
通过输入指令来实现逻辑控制, 需要掌握基本指令、功能指令等, 以及指令的格式、用法和注意事
项。
顺序功能图编程
通过描述顺序控制过程来实现逻 辑控制,需要掌握步、转换、动 作等概念,以及顺序功能图的绘
制方法和编程技巧。
调试技巧和经验分享
01
调试前准备
检查硬件接线是否正确、牢固;检查PLC程序是否符合控制要求;准备
深入探讨了伺服电机的控制模式,包括位置控制、速度控制和力矩 控制等,同时介绍了调试方法及注意事项。
学员心得体会分享
学员A
通过本次学习,我深刻理解了伺 服电机的工作原理和控制方法, 掌握了PLC与伺服电机的联动调试 技巧,对今后的工作有很大帮助。
学员B
在学习过程中,我遇到了很多难 题和挑战,但是在老师和同学的 帮助下,我逐一克服了困难,取 得了很大的进步。
用Arduino制作MWC小四轴参考教程
用Arduino制作MWC小四轴参考教程MWC(MultiWiiCopter)是一种开源的四轴飞行器控制系统,使用Arduino作为主要控制器,被广泛应用于小型四轴飞行器的制作。
下面是制作MWC小四轴的参考教程,共1200字以上。
首先,准备所需材料:1. Arduino Pro Mini开发板2.MPU6050陀螺仪和加速度计模块3.HC-05蓝牙模块4.4个无刷电机和电调5.4个螺旋桨6.电池、导线和焊锡工具7.透明塑料板或碳纤维板(用于机架)接下来,按照以下步骤进行制作:1.组装机架:使用透明塑料板或碳纤维板制作四轴机架,确保机架稳固且轻量。
2.连接电调和无刷电机:将电调连接到Arduino的PWM引脚上,然后将无刷电机连接到电调上。
确保所有电调和电机的接线正确,并根据需要焊接连接线。
3.连接加速度计和陀螺仪模块:将MPU6050陀螺仪和加速度计模块连接到Arduino的I2C接口上。
确保连接线正确并牢固。
可以使用焊接或插针连接。
4.连接蓝牙模块:将HC-05蓝牙模块连接到Arduino的串口接口上。
确保连接线正确并牢固。
可以使用焊接或插针连接。
5.编写控制程序:在Arduino IDE中编写控制程序。
该程序将读取加速度计和陀螺仪数据,然后计算四轴飞行器的姿态和稳定性。
还可以添加蓝牙通信功能,使手机或电脑可以通过蓝牙控制飞行器。
6.上传控制程序:使用Arduino IDE将编写好的控制程序上传到Arduino Pro Mini开发板上。
确保选择正确的开发板类型和端口,并点击“上传”按钮。
7.舵机校准:在完成上传后,需要校准四轴飞行器的舵机。
可以使用Arduino的Servo库进行舵机校准。
8.完成组装:将上面准备好的电调和无刷电机固定到机架上,确保四轴飞行器平衡且稳固。
连接电池,并将飞行器放在平坦的地面上。
9.测试飞行:打开手机或电脑上的蓝牙控制软件,并连接到飞行器上的HC-05蓝牙模块。
通过控制软件来操控飞行器,测试姿态和稳定性的调整是否正确。
arduino实训课程4

19
• 一种可以精确控制的交流电机
• 由驱动脉冲控制,每个脉冲让电机前进一个固定 的角度(步进角)
• 电机速度由单位时间内脉冲的个数决定(脉冲频 率)
• 功率小,负载能力低,控制相对复杂
• 每个线圈都可以两个方向通电 • 四根引线,每个线圈两条 • 使用数字万用表确定线圈分组
– 某两根引线之间能够测量到阻值就属于一组
void setup() {
myservo.attach(9); // 把舵机连接至九号PWM输出口上 }
void loop()
{
val = analogRead(potpin);
// 从电位器上读取电压值(从0到1023)
val = map(val, 0, 1023, 0, 179); // 用map函数将电压值转化成要控制的舵机的转动角度
• 双极性步进电机的步距通常是1.8°
– 转一圈需要200步
工作原理:
步进电机驱动器:
• 需要不断改变线圈中电流的方向
– 通过H桥式驱动电路完成
• 步进电机驱动模块EasyDriver
线圈A
线圈B 地
电机电源
电机电源和 Arduino 需要共地!
地
步进脉冲
方向
Arduino控制EasyDriver:
• 舵机的控制信号也是一种PWM信号 • 脉冲周期20毫秒 • 脉冲高电平持续1毫秒(1000微秒)到2毫秒(
2000微秒) • 用来控制的脉冲信号必须持续产生,否则很难稳定
注意:
• 舵机对控制脉冲高电平的宽度非常敏感 – 抖动:控制信号每个脉冲的高电平宽度不稳定
• 两个控制脉冲的间隔时间不太敏感 – 只要在可以接受的范围内都可以(14ms到20ms)
arduino控制舵机图

arduino控制舵机图Chapter 1: Introduction to Arduino and Servo Motors1.1 BackgroundArduino is an open-source electronics platform that allows users to create interactive projects. It is widely used for prototyping and building various types of electronic devices. One popular application of Arduino is the control of servo motors. Servo motors are widely used in robotics and automation systems to precisely control the position and movement of objects.1.2 ObjectiveThe objective of this paper is to explore the Arduino platform and its capability to control servo motors. This paper aims to provide a comprehensive understanding of the principles behind servo motor control and the implementation of Arduino in achieving this control.Chapter 2: Servo Motor Control Basics2.1 Overview of Servo MotorsA servo motor is a rotary actuator that allows for precise control of angular position, acceleration, and velocity. It consists of a motor, a position feedback sensor, and a control circuit. Servo motors are designed to be easy to use and are commonly used in various applications such as robots, RC vehicles, and automation systems.2.2 Principles of Servo Motor ControlServo motors operate based on a closed-loop control system. The control circuit receives a control signal, compares it to thefeedback from the position sensor, and adjusts the motor's position accordingly. This mechanism allows for precise control over the motor's movement.2.3 Pulse Width Modulation (PWM)PWM is a technique used to control the speed of a motor by adjusting the duty cycle of a square wave signal. Arduino generates PWM signals to control servo motors by varying the width of the pulse. The timing of the pulse is crucial in determining the position of the servo motor.Chapter 3: Arduino and Servo Motor Control3.1 Introduction to ArduinoArduino is an open-source hardware and software platform that simplifies the process of creating interactive electronic projects. It consists of a microcontroller board and a programming environment that allows users to write code for various applications.3.2 Arduino Servo LibraryArduino provides a default Servo library that simplifies the control of servo motors. This library allows users to control multiple servo motors simultaneously using functions such as attach(), write(), and read(). These functions handle the generation of PWM signals and the control of servo motors effortlessly.3.3 Wiring and Programming Arduino for Servo Motor Control To control a servo motor using Arduino, one needs to connect the servo motor's control pin to one of the Arduino's PWM pins. TheArduino code then uses the Servo library to initialize and control the servo motor's position.Chapter 4: Application and Conclusion4.1 Application of Arduino and Servo Motor ControlArduino and servo motor control have various applications, including robotics, automation, and remote control devices. The precise movement and positioning capability of servo motors make them ideal for these applications.4.2 ConclusionIn conclusion, Arduino provides a user-friendly platform for controlling servo motors. By using the Servo library and understanding the principles of servo motor control, users can implement precise and accurate positioning of servo motors in their projects. Arduino's versatility and ease of use make it a popular choice for controlling servo motors in various applications. References: (List any references used in the paper)如何提高效率和工作质量在现代快节奏的工作环境中,提高效率和工作质量成为了许多人的追求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四十二课Arduino 伺服电机
伺服电机是一种有输出轴的小型设备。
通过向伺服发送编码信号,可以将该轴定位到特定的角度位置。
只要编码信号存在于输入线上,伺服将保持轴的角位置。
如果编码信号改变,则轴的角位置改变。
实际上,伺服用于无线电控制的飞机中来定位控制面,如升降舵和方向舵。
它们还用于无线电控制的汽车,木偶,当然还有机器人。
伺服在机器人中非常有用。
电机体积小,内置控制电路,相对于它们尺寸来说非常强大。
标准伺服如Futaba S-148具有42盎司/英寸的扭矩,这对于其尺寸来说是坚固的。
它还吸取与机械负载成比例的功率。
因此,轻负载伺服不会消耗太多能量。
伺服电机的内胆如下图所示。
你可以看到控制电路,电机,一组齿轮和外壳。
你还可以看到连接到外部的3根电线。
一个是接电源(+5伏),一个接地,而白线是控制线。
伺服电机的工作
伺服电机有一些控制电路和一个连接到输出轴上的电位器(一个可变电阻,也称为电位器)。
在上图中,电位器可以在电路板的右侧看到。
该电位器允许控制电路监视伺服电机的当前角度。
如果轴处于正确的角度,则电机关闭。
如果电路发现角度不正确,则会转动电机直到处于所需的角度。
伺服的输出轴能够在180度左右的地方移动。
通常情况下,它是在210度范围
内的某个地方,然而,这取决于制造商。
正常伺服用于控制0至180度的角运动。
由于主输出齿轮上的机械止动装置,机械上它无法转动更远。
施加到电机上的功率与其需要行进的距离成比例。
因此,如果轴需要转动较大的距离,电机将以全速运转。
如果只需要少量转动,电机将以较低的速度运转。
这称为比例控制。
如何沟通伺服应该转动的角度?
控制线用于传达角度。
该角度由施加到控制线的脉冲持续时间确定。
这称为脉冲编码调制。
伺服期望每20毫秒(0.02秒)看到一个脉冲。
脉冲的长度将决定电机转动的距离。
例如,
1.5毫秒脉冲将使电机转到90度位置(通常称为中性位置)。
如果脉冲短于1.5毫秒,则
电机将轴转到更接近0度。
如果脉冲长于1.5毫秒,则轴转接近180度。
必需的组件
你将需要以下组件:
∙ 1 × Arduino UNO板
∙ 1 ×伺服电机
∙ 1 × ULN2003驱动IC
∙ 1 × 10KΩ电阻
程序
按照电路图进行连接,如下图所示。
草图
在计算机上打开Arduino IDE软件。
使用Arduino语言进行编码控制你的电路。
通过单击“New”打开一个新的草图文件。
Arduino代码
代码说明
伺服电机有三个端子:电源,接地和信号。
电源线通常为红色,应连接到Arduino上的5V 引脚。
接地线通常为黑色或棕色,应连接到ULN2003 IC(10-16)的一个端子。
为了保护你的Arduino板免受损坏,你将需要一些驱动IC来处理这些。
这里我们使用ULN2003 IC 来驱动伺服电机。
信号引脚通常为黄色或橙色,应连接到Arduino引脚9。
连接电位器
分压器是串联电路中的电阻器,其将输出电压缩放到施加的输入电压的特定比例。
下面是电路图:
V out是输出电位,取决于施加的输入电压(V in)和电阻(R1和R2)。
这意味着流过R1的电流也将流过R2而不被分流。
在上述等式中,随着R的值改变,V out相对于输入电压V in 而缩放。
通常,电位器是一个分压器,它可以根据可变电阻的值而使用旋钮来缩放电路的输出电压。
它有三个引脚:GND,Signal和+5V,如下图所示:
结果
通过更改电位器的NOP位置,伺服电机将改变其角度。