Fanuc法兰克系统报警号说明书
法兰克系统报警号说明

一、后台编辑报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S报警(070、071、072、073、074、085、086、087)。
2. 140号报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息: “Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息: “TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息: “TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息: “Too many digits”,数字太多。
报警说明: 输入了超过允许位数的数据。
5.004号报警报警信息: “Address not found”,没有发现地址。
报警说明: 在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息: “No data after address”,地址之后没有数据。
报警说明: 地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息: “Illegal use of negative sign”,非法使用负号。
报警说明: 负号“-”输入错误(“-”出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序。
8.007号报警报警信息: “Illegal use of decimal point”,非法使用十进制小数点。
报警说明: 小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。
FANUC报警号

FANUC艮警号FANUC OMD系统报警说明1. 程序报警(P/S 报警)报警号报警内容OOO修改后须断电才能生效的参数,参数修改完毕后应该断电。
OO1TH报警,外设输入的程序格式错误。
OO2TV报警,外设输入的程序格式错误。
OO3输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
OO4程序段的第一个字符不是地址,而是一个数字或“-”。
OO5 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
OO6符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个« » 、“-”)。
OO7小数点“ . ”使用错误。
OO9一个字符出现在不能够使用该字符的位置。
O1O指令了一个不能用的G 代码。
O11 一个切削进给没有被给出进给率。
O14 程序中出现了同步进给指令(本机床没有该功能)。
O15企图使四个轴同时运动。
O2O圆弧插补中,起始点和终点到圆心的距离的差大于876 号参数指定的数值。
021圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029H指定的偏置号中的刀具补偿值太大。
030使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033编程了一个刀具半径补偿中不能出现的交点。
034圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041调入的刀具半径R参数(或刀尖的半径R参数)补偿时将产生过切削的情况。
NC在当前的加工步时,向下预读检查时发现,即将加工时要调入的刀具半径R参数(或刀尖的半径R参数)进行补偿时将产生过切削的情况。
如NC在当前加工步时,向下预读检查时发现,即将调入的刀具半径R参数(或刀尖的半径R参数)太大而即将进行加工的圆角太小,调入的刀具半径R参数(或刀尖的半径R参数)进行补偿时将产生过切削的情况。
法拉克系统报警表

1000 X LIMIT EMG.STOP X 轴硬限位急停 1001 Y LIMIT EMG.STOP Y 轴硬限位急停 1002 Z LIMIT EMG.STOP Z 轴硬限位急停 1003 OP.PANET EMG.HAS BEEN PUSHED 操作面板急停被按下 1004 MPG.BOXEMG.HAS BEEN PUSHED 手轮急停被按下 1005 MPG.PANEL.HAS BEEN PUSHED 刀库急停被按下 1006 CHIP conv.emg.hasbeen PUSHED 排屑器急停被按下 1007 A-P-OFF ENAB BY CABI.OR OPEN 自动断电,电柜门开 1013 SP H/L SPEED FUNC=>K5.0 SET ERR 主轴高低速功能 K5.0 设定错 误 1014 CONFIRM.OF SPDL HEAD COVER. 主轴板合未盖好 1015 POWER OFF->POWER ON 开机关机 1100 ATC INVERTER OVERLOAD 1104 PLEAS WARM UP FIRST!! 请先热机 1106 Z NOT AT IST REF.POS Z 不在第一参考点 1107 PRESS 'NC-START' TO CONTINUE 按循环启动继续 1108 NO CONFIRM.OF POT UP 刀套上升未确定 1109 NO CONFIRM.OF POT DOWN 刀套下降未确定 1110 POT UP&DOWN BOTH ON. 刀套上下均未检测到 1117 NO CONFIRM.OF TOOL CLAMP 刀具夹紧未确认 1118 NO CONFIRM.OF TOOL UNCLAMP 刀具松开未确认 1119 TOOL CLAMP/UNCLAMP LS.BOTH ON 刀具松开加紧信号异常 1120 TOOL BROKEN 道具破损 1121 MAG.NOT INPOSITION 刀库位置异常 1122 MAG.ROTATE TIME OUT 刀库旋转时间超时 1124 during T CYCLE.POWER DROP DOWN T 指令时断电 1125 during M6 CYCLE.POWER DROP DOWN 换刀断电(请同时按下两个键: 停止键和消除 RESET 键) 1126 ILLEAGL T-CMP.T-CMD>MAX.T-NO 错误的 T 代码 1127 SPDL NOT ORIENT 主轴未定向 1128 AXES NOT AT ATC POS 轴不在换刀位置 1129 ARM SEN.DETECT ERR.PLS CHK.CIRCUIT.换刀臂位置检测出错 1132 the TOOL IS NOT REGISTERED 刀具未注册 1133 NO FREE POCKET FOR SPDL TOOL 没有空刀套 1134 CLR TASK BY 'RST+FEED HD'=>2SEC 按 RST+FEED HD2 秒清除 1136 SP.TL-NO(DO)&TYPE(D50)NOT MATCH.未标明主轴刀具号合类 型 1137 ARM1&2DATA ERR.CHK D6&D8 刀臂 1 号和 2 号资料错查
Fanuc法兰克系统报警号说明书
21.031号报警报警信息: "Illegal P command in G10",G10指令中非法P命令。
报警说明: 在用G10设定补偿数值中,跟随地址的P补偿号不超出或者没有指定。
修改程序。
22.032号报警报警信息: "Illegal offset value in G10",G10指令中非法补偿值。
报警说明:在用G10设定补偿数值中或者用系统变量写入一个补偿数值时,补偿数值超出。
23.033号报警报警信息: "No solution at CRC",在CRC上不能计算。
报警说明: 刀尖半径补偿后交点计算不出来。
修改程序。
24.034号报警报警信息: "No circ allowed in ST-UP/EXT BLK",在启动、取消块中不允许循环。
报警说明:在G02和G03方式下,正在启动或者取消刀尖半径补偿。
修改程序。
25.035号报警报警信息: "Can not commanded G31",不能使用指令G31。
报警说明: 在刀具刀尖报警补偿方式指定了跳跃切削 (G31)。
26.037号报警报警信息: "Can not change plane in NRC",在NRC方式时,不能变换平面。
报警说明: 在刀尖半径补偿中,切换了补偿平面。
27.038号报警报警信息: "Interference in circular",圆弧干涉。
报警说明: 因为圆弧起点或者终点与中心重合,导致刀具半径补偿时过切削。
28.039号报警报警信息: "CHF/CNR not allowed in NRC",在NCR方式不允许CHF/CNR。
报警说明: 在刀具刀尖半径补偿中,启动、删除和G41/G42更换时,使用了倒角或者拐角指令。
在倒角或者拐角可能引起过切削。
FANUC系统报警代码表2011
FANUC系统报警代码表1.程序报警(P/S报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH报警,外设输入的程序格式错误。
002 TV报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T代码。
044 固定循环模态下使用G27、G28或G30指令。
046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。
FANUC系统报警信息诠释

FANUC系统报警信息诠释故障代码解释及应对措施1)SRVO–001 SVAL1 Operator panel E–stop 解释:按下在操作员面板或是操作箱上的紧急停止按钮。
如果 SYST-067(面板HSSB 断开连接)警报也同时发生,或是如果在面板上 LED 指示灯(绿色) 关闭不发光,主板(JRS15)和面板(JRS15)通讯异常。
主板和面板电路板之间的电缆连接可能松动。
或者,电缆,面板电路板或是主板可能有故障。
注意:如果LED 指示灯是关闭不发光的,下面的警报也会产生。
SRVO–001 Operator panel E–stop.SRVO–004 Fence open.SRVO–007 External emergency stop. SRVO–199 Control stop.SRVO–204 External (SVEMG abnormal) E–stop.SRVO–213 Fuse blown (Panel PCB).SRVO–277 Panel E–stop (SVEMG abnormal). SRVO–280 SVOFF input检查显示在示教盒上显示的警报历史。
(措施1):释放在操作员面板或是操作员箱上被按下的紧急停止按钮。
(措施 2):确认操面板电路板(CRT16)和急停按钮之间的连接电缆,如果有裸线,则替换电缆。
(措施3):确认连接面板电路板(CRS20 或CRS1)和示教盘之间的连接电缆,如果有裸线,则替换电缆。
(措施4):当紧急停止按钮在释放的位置,检查接线端和开关的连接情况,如果没有连通,则是急停按钮的故障。
替换开关或操作面板。
(措施5):替换示教盘。
(措施6):替换面板电路板。
注意:在执行措施7 前,完成整个控制器的备份来保存所有程序和设置内容。
(措施7):替换主板。
注释:与SRVO-213 同时发生时,可能是因为保险丝已经熔断。
采取与SRVO-213 相同的处理措施。
法兰克数控系统维修 FANUC 0i系统故障报警信息处理维修方法
法兰克数控系统维修FANUC 0i系统故障报警信息处理维修方法出处:名慧模具网模具视频教程网,UG视频教程,CAD教程,PRO/E,模具设计,CATIA,数控仿真软件发布日期:2009-10-27 17:51:51 浏览次数:88811、报警信息的查看方法数控系统可对其本身以及其相连的各种设备进行实时的自诊断。
当数控机床出现不能保证正常运行的状态或异常都可以通过数控系统强大的功能,对其数控系统自身及所连接的各种设备进行实时的自诊断。
当数控机床出现不能满足保证正常运行的状态或异常时,数控系统就会报警,并将在屏幕中显示相关的报警信息及处理方法。
这样,就可以根据屏幕上显示的内容采取相应的措施。
一般情况下,系统出现报警时,屏幕显示就会跳转到报警显示屏幕,显示出报警信息,如图所示。
某些情况下,出现故障报警时,不会直接跳转到报警显示屏幕,如图所示:FANUC 0i数控系统提供了报警履历显示功能,其最多可存储并在屏幕上显示的50个最近出现的报警信息。
大大方便了对机床故障的跟踪和统计工作。
显示报警履历的操作如下:2、FANUC 0i数控系统报警的分类据操作人员讲,在进行开机前设备检查时,发现进入机床的压缩空气压力过高,达到了0.8MPa,超出了0.4-0.6MPa的机床允许范围,所以就调整了压缩空气压力,使其压力在机床允许的范围之内,然后进行自动运行加工,l0分钟以后便出现了“1010空气压力异常”的报警。
据此分析,此次故障发生的主要原因是,在进行开机前设备检查时,由于大部分的设备都未正式运转和系统的压缩空气压力偏高了一点点,造成了进入机床的压缩空气压力高达0.8MPao而当大部分的设备都进入正式运转和对整个压缩空气供给系统过高的压力进行了调整后,便出现了机床在自动运行加工的过程中,出现机床的压缩空气压力下降到0.25MPa的情况。
以下是故障的排除过程。
数控系统是怎样知道进入机床的压缩空气压力未能达到指定的值呢?数控机床为做到自动控制设置了相应的检测器件(接近开关、位置开关、光栅等)。
FANUC系统报警代码表2011
FANUC系统报警代码表1.程序报警(P/S报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH报警,外设输入的程序格式错误。
002 TV报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T代码。
044 固定循环模态下使用G27、G28或G30指令。
046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。
FANUC 报警表
FANUC-0系统报警代码表FANUC-0系统报警代码表1. 程序报警(P/S报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH报警,外设输入的程序格式错误。
002 TV报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T代码。
044 固定循环模态下使用G27、G28或G30指令。
046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。
FANUC OI系统报警说明

一、后台编辑报警1.???报警信息:“BP/S alarm”,BP/S报警。
报警说明:与一般的程序编辑中发生的P/S号报警相同,发生BP/S报警(070、071、072、073、074、085、086、087)。
2.140号报警报警信息:“BP/S alarm”,BP/S报警。
报警说明:在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息:“Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息:“TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息:“TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息:“Too many digits”,数字太多。
报警说明:输入了超过允许位数的数据。
5.004号报警报警信息:“Address not found”,没有发现地址。
报警说明:在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息:“No data after address”,地址之后没有数据。
报警说明:地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息:“Illegal use of negative sign”,非法使用负号。
报警说明:负号“-”输入错误(“-”出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序。
8.007号报警报警信息:“Illegal use of decimal point”,非法使用十进制小数点。
报警说明:小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。
修改程序。
9.008号报警报警信息:“Program has an error at end”,在程序结尾有一个错误。
FANUC报警信息代码精选文档

F A N U C报警信息代码精选文档TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-C.警告代码手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。
j 附录目录C.1 警告代码表的具体描述C.2 警告代码C.1 警告代码表的具体描述其中:Alarm code表示警告代码; Message表示信息; Alarm severity 表示警告强度。
警告在程序被校正或返回执行或当从外围单元输入一个紧急制动信号或是其他警告信号时失败则会引发警告。
警告是用来提示操作员发生故障,使其为安全起见能中断处理。
提示:如果出现的警告编号不在这里给出代码内,请和FANUC机器人专家联系。
警告代码显示或指示当引发了一个警告,在教导盒上的警告LED发光二极管会亮起,首先会在出现警告信息,然后会出现界面命令行。
操作员可以通过查看LED和信息得知引发了哪个警告。
图C-1 警告显示警告强度如何操作程序或机器人直到程序或机器人停止取决于引发警告的原因的严重性。
这个“严重性”被成为强度。
警告强度级别如下所示:表C-1 警告强度活动警告界面活动警告界面只显示活动的警告。
一旦该警告被警告清除信号输入清除,活动警告界面显示:“没有活动的警告”。
在上一条警告清除信号输入后,界面显示警告输出。
当在警告历史纪录界面按下删除键(+shift),相应的警告会从活动警告界面里清除。
该界面显示警告的严重等级为PAUSE或更高。
不会显示WARN警告, NONE警告或重置。
如果系统变量诸如$ER_NOHIS设置正确的话,一些PAUSE警告或是更严重的警告也可能不会被显示。
如果检测到了多个警告,该界面按检测到的顺序反向显示。
最大可以显示100行。
如果警告有错误发生代码,该代码会在警告显示行下显示出来。
图C-2显示活动警告界面和警告历史记录界面的操作流程。
其中:MENU key pressed, then 4ALARM selected表示:按下MENU(菜单)键,然后选择4ALARM;Alarm key pressed表示:按下警告键;Automatically displayed when an alarm is output表示:当警告被输出会自动被显示;Active alarm screen displayed表示:显示活动警告界面;Alarm history screen displayed表示:显示警告历史记录界面。
发那科数控系统报警代码表
1 附录1:FANUC-0系统报警代码表1. 程序报警(P/S报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH报警,外设输入的程序格式错误。
002 TV报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T代码。
044 固定循环模态下使用G27、G28或G30指令。
046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。
FANUC-0系统报警代码表之欧阳地创编

FANUC-0系统报警代码表 1. 程序报警(P/S报警)报警号报警内容000 修改后须断电才能生效的参数,参数修改完毕后应该断电。
001 TH报警,外设输入的程序格式错误。
002 TV报警,外设输入的程序格式错误。
003 输入的数据超过了最大允许输入的值。
参考编程部分的有关内容。
004 程序段的第一个字符不是地址,而是一个数字或“-”。
005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。
006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。
007 小数点“. ”使用错误。
009 一个字符出现在不能够使用该字符的位置。
010 指令了一个不能用的G代码。
011 一个切削进给没有被给出进给率。
014 程序中出现了同步进给指令(本机床没有该功能)。
015 企图使四个轴同时运动。
020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。
021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。
029 H指定的偏置号中的刀具补偿值太大。
030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。
033 编程了一个刀具半径补偿中不能出现的交点。
034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。
037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。
038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。
041 刀具半径补偿时将产生过切削的情况。
043 指令了一个无效的T代码。
044 固定循环模态下使用G27、G28或G30指令。
046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。
051 自动切角或自动圆角程序段后出现了不可能实现的运动。
052 自动切角或自动圆角程序段后的程序段不是G01指令。
053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。
FANUC发那科报警概述

FANUC发那科报警概述B-65285EN/02 故障处理 1.概述1概述这一章描述了对每种模块的故障处理过程,根据你目前的故障,阅读相应的章节并采取相应的措施。
首先,检查你的模块的报警号和状态显示(列表中的报警号是针对不同的CNC),请在第二章的列表中找出,且在第三章中找到相应的详细的信息。
然后按照详细的信息采取相应的措施。
3.故障处理及其方法故障处理B-65285EN/02 2报警号及其简要说2.1 对应15i2.2.1伺服报警报警号SVM SPM 说明备注SV0027 无效的参数设定 3.3.6SV0361 编码器相位错误(内置) 3.3.7(1)SV0364 软件相位错误(内置) 3.3.7(1)SV0365 LED错误(内置) 3.3.7(1)SV0366 脉冲错误(内置) 3.3.7(1)SV0367 计数错误(内置) 3.3.7(1)SV0368 串行数据错误(内置) 3.3.7(3)SV0369 数据传送错误(内置) 3.3.7(3)SV0380 LED错误(别置) 3.3.7(2)SV0381 脉冲编码器相位错误(别置) 3.3.7(2)SV0382 计数错误(别置) 3.3.7(2)SV0383 脉冲错误(别置) 3.3.7(2)SV0384 软件相位错误(别置) 3.3.7(2)SV0385 串行数据错误(别置) 3.3.7(3)SV0386 数据传送错误(别置) 3.3.7(3)SV0387 传感器错误(别置) 3.3.7(2)SV0421 半闭环超差错误 3.3.8SV0430 伺服电机过热 3.3.5SV0431 3 电源单元:主环路过载 3.1.3SV0432 6 电源单元:输入电压低 3.1.6SV0433 电源单元:DC LINK电压低 3.14SV0434 2 伺服单元:控制电源电压低 3.2SV0435 5 伺服单元:DC LINK电源电压低 3.2 SV0436 软件温度报警(OVC) 3.3.3SV0437 1 电源单元:输入电流过大 3.1.1SV0438 b 伺服单元:电机电流报警(L轴) 3.2SV0438 c 伺服单元:电机电流报警(M轴) 3.2SV0438 d 伺服单元:电机电流报警(N轴) 3.2SV0439 7 电源单元: DC LINK电压过大 3.1.7 SV0440 H 电源单元:减速电源能量过大 3.1.11 SV0441 电流偏置报警 3.3.8SV0442 5 电源单元: 3.1.5SV0443 2 电源单元:冷却风扇停止 3.1.2SV0444 1 伺服单元:内部冷却风扇停止 3.2SV0445 软连接报警 3.3.4SV0446 硬连接报警没公开SV0447 硬连接报警(别置) 3.3.4SV0448 反馈不匹配报警 3.3.8SV0449 8. 伺服单元:IPM报警(L轴) 3.2SV0449 9. 伺服单元: IPM报警(L轴) 3.2SV0449 A. 伺服单元: IPM报警(L轴) 3.2SV0600 8. 伺服单元:DC link 电流报警(L轴) 3.2 B-65285EN/02 故障处理 3.故障处理及其方法SV0600 9. 伺服单元: DC link 电流报警(M轴) 3.2SV0600 A. 伺服单元: DC link 电流报警(N轴) 3.2SV0601 F 伺服单元:散热器的冷却风扇停止 3.2SV0602 6 伺服单元:过热 3.2报警号SVM SPM 说明备注SV0603 8. 伺服单元:IPM报警(L轴) 3.2SV0603 9. 伺服单元:IPM报警(L轴) 3.2SV0603 A. 伺服单元:IPM报警(L轴) 3.2SV0604 P 通讯错误 3.2SV0605 8 电源单元:回馈电压过高 3.1.8SV0606 A 电源单元:散热器的冷却风扇停止 3.1.9SV0607 E 电源单元交流电源电压缺相 3.1.103.故障处理及其方法故障处理B-65285EN/02 2.2.2主轴报警报警号SPM PSM 说明备注SP0001 01 电机过热 3.4.1SP0002 02 速度超差 3.4.2SP0003 03 DC LINK 回路保险断 3.4.3SP0004 04 E 电源单元的交流输入缺相 3.1.10SP0006 06 温度传感器没有连接 3.4.4SP0007 07 速度太高 3.4.5SP0009 09 主回路过载/IPM过热 3.4.6SP0011 11 7 电源单元:DC LINK 电压太高 3.1.7SP0012 12 DC LINK 回路电流太大/IPM报警 3.4.7, 3.5.1 SP0015 15 输出切换/主轴切换报警 3.4.8SP098X 18 和数校验错误 3.4.9SP098X 19 U相电流超差 3.4.10SP098X 20 V相电流超差 3.4.10SP0021 21 位置编码器的极性设定错误 3.4.11SP022X 24 串行传送数据错误 3.4.12SP0027 27 没有连接位置编码器 3.4.13SP0029 29 短时的过载 3.4.14SP0030 30 1 电源单元的输入电流太大 3.4.14SP0031 31 电机锁住报警 3.4.15SP0032 32 串行通讯用的LSI RAM 错误 3.4.16SP0033 33 5 电源单元:DC LINK 预先充电失败 3.1.5SP0034 34 参数值超出了可设范围 3.4.17SP0035 35 齿数比参数错误 3.5.2SP0036 36 误差计数器溢出 3.4.18SP0037 37 速度检测器的参数设定错误 3.4.19SP0041 41 位置编码器的一转信号检测错误 3.4.20SP0042 42 位置编码器的一转信号没有被检测到 3.4.21SP0046 46 位置编码器的一转信号在螺纹切削时检测错误 3.4.22 SP0047 47 位置编码器的信号错误 3.4.23SP0050 50 在主轴同步中,超出了速度指令计算值 3.4.24SP0051 51 4 电源单元:DC LINK 电压太低 3.1.4SP0052 52 ITP 信号错误1 3.4.25SP0053 53 ITP 信号错误2 3.4.25SP0054 54 电流过载报警 3.4.26SP0055 55 电源线的切换状态不正常 3.4.27SP0056 56 内部冷却风扇停止 3.4.28SP0057 57 H 电源单元:减速电源电压太大 3.1.11SP0058 58 3 电源单元:主回路过载 3.1.3SP0059 59 2 电源单元:冷却风扇停止 3.1.2SP0066 66 主轴与放大器之间的通讯停止 3.4.29SP0069 69 超出了安全速度 3.4.30SP0070 70 不正常的轴数据 3.4.31SP0071 71 非正常的安全参数 3.4.32SP0072 72 电机速度不匹配 3.4.33SP0073 73 电机的传感器没有连接 3.4.34SP0074 74 CPU 测试错误 3.4.35B-65285EN/02 故障处理 3.故障处理及其方法报警号SPM PSM 说明备注SP0075 75 CRC 检测错误 3.4.1SP0076 76 安全功能没有执行 3.4.2SP0077 77 轴数不匹配 3.4.3SP0078 78 安全参数不匹配 3.1.10SP0079 79 非正常的内部测试操作 3.4.4SP0081 81 电机传感器的一转信号检测错误 3.4.5 SP0082 82 电机传感器的一转信号没有检测到 3.4.6 SP0083 83 电机传感器的信号错误 3.1.7SP0084 84 主轴传感器没有连接 3.4.44SP0085 85 主轴传感器的一转信号检测错误 3.4.45 SP0086 86 主轴传感器的一转信号没有检测到 3.4.46 SP0087 87 主轴传感器的信号错误 3.4.47SP0088 88 散热器的冷却风扇停止 3.4.48其他主轴放大器报警 3.4.52SP0097(MODEL A)SP097X A ROM 错误 3.4.49SP097X A1 ROM 错误 3.4.49SP097X A2 ROM 错误 3.4.49SP0098 其他电源单元报警 3.4.52SP0098b0 在放大器与模块之间的通讯错误 3.4.50 (MODELA)b1 6 电源单元:控制电源电压太低 3.1.6SP0098(MODEL A)b2 8 电源单元:再生电源能量太大 3.1.8SP0098(MODEL A)b3 2 电源单元:散热器的冷却风扇停止 3.1.9 SP0098(MODEL A)b0 放大器与模块之间的通讯错误 3.4.50SP0110(MODEL B)b1 6 电源单元:控制电源电压太低 3.1.6SP0111(MODEL B)b2 8 电源单元:再生电源能量太大 3.1.8SP0112(MODEL B)b3 A 电源单元:散热器的冷却风扇停止 3.1.9 SP0113(MODEL B)c0 通讯数据报警 3.4.51SP0120(MODEL B)SP0121c1 通讯数据报警 3.4.51(MODEL B)SP0122c2 通讯数据报警 3.4.51(MODEL B)3.故障处理及其方法故障处理B-65285EN/02 2.2 对应16i,18i,20i,21i,和Power Mate i 2.2.1伺服报警报警号SVM SPM 说明备注361 编码器相位错误(内置) 3.3.7(1)364 软件相位错误(内置) 3.3.7(1)365 LED错误(内置) 3.3.7(1)366 脉冲错误(内置) 3.3.7(1)367 计数错误(内置) 3.3.7(1)368 串行数据错误(内置) 3.3.7(3)369 数据传送错误(内置) 3.3.7(3)380 LED错误(别置) 3.3.7(2)381 脉冲编码器相位错误(别置) 3.3.7(2) 382 计数错误(别置) 3.3.7(2)383 脉冲错误(别置) 3.3.7(2)384 软件相位错误(别置) 3.3.7(2)385 串行数据错误(别置) 3.3.7(3)386 数据传送错误(别置) 3.3.7(3)387 传感器错误(别置) 3.3.7(2)417 无效的参数 3.3.6421 半闭环超差错误 3.3.8430 伺服电机过热 3.3.5431 3 电源单元:主环路过载 3.1.3432 6 电源单元:输入电压低 3.1.6433 电源单元:DC LINK电压低 3.14434 2 伺服单元:控制电源电压低 3.2435 5 伺服单元:DC LINK电源电压低 3.2 436 温度软件报警(OVC) 3.3.3437 1 电源单元:输入电流过大 3.1.1438 b 伺服单元:电机电流报警(L轴) 3.2 438 c 伺服单元:电机电流报警(M轴) 3.2 438 d 伺服单元:电机电流报警(N轴) 3.2 439 7 电源单元: DC LINK电压过大 3.1.7 440 H 电源单元:减速电源能量过大 2.1.11 441 电流偏置报警 3.3.8442 5 电源单元: 3.1.5443 2 电源单元:冷却风扇停止 3.1.2444 1 伺服单元:内部冷却风扇停止 3.2445 连接软件报警 3.3.4446 连接硬件报警没公开447 连接硬件报警(别置) 3.3.4448 反馈不匹配报警 3.3.8449 8. 伺服单元:IPM报警(L轴) 3.2449 9. 伺服单元:IPM报警(L轴) 3.2449 A. 伺服单元:IPM报警(L轴) 3.2453 断线软件报警(别置) 3.3.4600 8. 伺服单元:DC link 电流报警(L轴) 3.2 600 9. 伺服单元:DC link 电流报警(M轴) 3.2 600 A. 伺服单元:DC link 电流报警(N轴) 3.2 601 F 伺服单元:散热器的冷却风扇停止 3.2 B-65285EN/02 故障处理 3.故障处理及其方法报警号SVM SPM 说明备注602 伺服单元:过热 3.2603 8. 伺服单元:IPM报警(L轴) 3.2603 9. 伺服单元:IPM报警(L轴) 3.2603 A. 伺服单元:IPM报警(L轴) 3.2604 P 通讯错误 3.2605 8 电源单元:回馈电压过高 3.1.8606 A 电源单元:散热器的冷却风扇停止 3.1.9 607 E 电源单元交流电源电压缺相 3.1.10。
FANUC报警一览表之
αi系列主轴放大器的报警号和报警显示
报警号
信息
SVPM
STATUS1
指示(*1)
故障位置及处理
说明
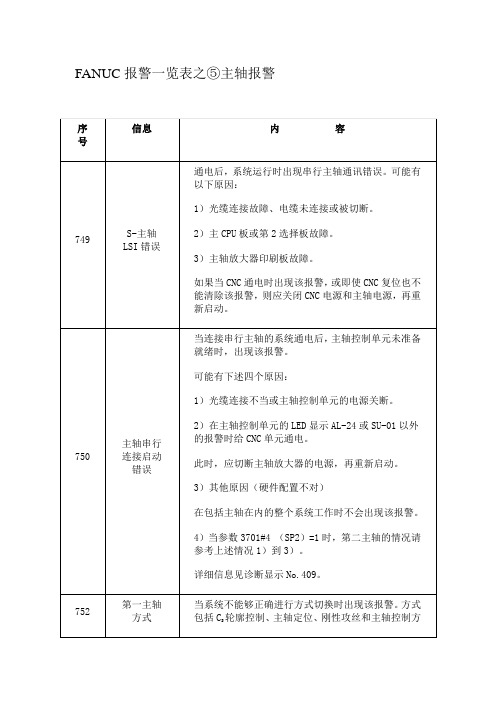
(750)
主轴串行连接错误
A0
A
1 更换SVPM的控制电路印 刷板上的ROM。
2 更换SVPM控制电路印刷板。
程序未正常启动。
SVPM的控制电路印刷板上的ROM版本号错误或硬件故障。
初始化检测错误
79
更换SVPM控制印刷电路板。
初始化检验时发现错误。
7n81
SPN_n_:
1转电机编码器信号错误
81
1.检查和修改参数。
2.更换反馈电缆。
3.调整传感器。
不能正确检测到电机传感器的1转信号。
7n82
SPN_n_:
无1转电机编码器信号
82
1.更换反馈电缆。
2.调整传感器。
电机传感器的1转信号没有发出。
7n51
SPN_n_:
DC LINK电压过低
51
1.检查并调整电源电压
2.更换MC。
输入电源掉电(瞬间电源故障或MC接触不良)。
7n52
SPN_n_:
ITP信号异常I
52
1.更换SVPM控制电路板。
2.更换CNC中的主轴接口电路板。
NC接口异常(ITP信号停止)。
7n53
SPN_n_:
ITP信号异常II
#7
#6
#5
#4
#3
#2
#1
#0
409
SPE
S2E
S1E
SHE
#3(SPE):0:在主轴串行控制中,串行主轴参数满足主轴单元的启动条件。
FANUC报警信息代码

C.警告代码手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。
j 附录目录C.1 警告代码表的具体描述C.2 警告代码C.1 警告代码表的具体描述其中:Alarm code表示警告代码;Message表示信息;Alarm severity 表示警告强度。
警告在程序被校正或返回执行或当从外围单元输入一个紧急制动信号或是其他警告信号时失败则会引发警告。
警告是用来提示操作员发生故障,使其为安全起见能中断处理。
提示:如果出现的警告编号不在这里给出代码内,请和FANUC机器人专家联系。
警告代码显示或指示当引发了一个警告,在教导盒上的警告LED发光二极管会亮起,首先会在出现警告信息,然后会出现界面命令行。
操作员可以通过查看LED和信息得知引发了哪个警告。
图C-1 警告显示警告强度如何操作程序或机器人直到程序或机器人停止取决于引发警告的原因的严重性。
这个“严重性”被成为强度。
警告强度级别如下所示:表C-1 警告强度活动警告界面活动警告界面只显示活动的警告。
一旦该警告被警告清除信号输入清除,活动警告界面显示:“没有活动的警告”。
在上一条警告清除信号输入后,界面显示警告输出。
当在警告历史纪录界面按下删除键(+shift),相应的警告会从活动警告界面里清除。
该界面显示警告的严重等级为PAUSE或更高。
不会显示WARN警告,NONE警告或重置。
如果系统变量诸如$ER_NOHIS设置正确的话,一些PAUSE警告或是更严重的警告也可能不会被显示。
如果检测到了多个警告,该界面按检测到的顺序反向显示。
最大可以显示100行。
如果警告有错误发生代码,该代码会在警告显示行下显示出来。
图C-2显示活动警告界面和警告历史记录界面的操作流程。
其中:MENU key pressed, then 4ALARM selected表示:按下MENU(菜单)键,然后选择4ALARM;Alarm key pressed表示:按下警告键;Automatically displayed when an alarm is output表示:当警告被输出会自动被显示;Active alarm screen displayed表示:显示活动警告界面;Alarm history screen displayed表示:显示警告历史记录界面。
FANUC程序报警

一、后台编辑报警1.???报警信息: “BP/S alarm”,BP/S报警。
报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S报警(070、071、072、073、074、085、086、087)。
2. 140号报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息: “Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息: “TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息: “TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息: “Too many digits”,数字太多。
报警说明: 输入了超过允许位数的数据。
5.004号报警报警信息: “Address not found”,没有发现地址。
报警说明: 在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息: “No data after address”,地址之后没有数据。
报警说明: 地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息: “Illegal use of negative sign”,非法使用负号。
报警说明: 负号“-”输入错误(“-” 出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序。
8.007号报警报警信息: “Illegal use of decimal point”,非法使用十进制小数点。
报警说明: 小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。
FANUC报警信息说明书
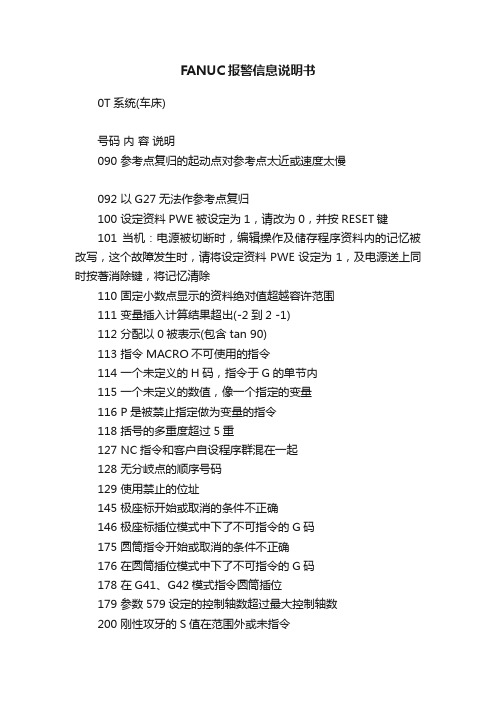
FANUC报警信息说明书0T系统(车床)号码内容说明090 参考点复归的起动点对参考点太近或速度太慢092 以G27无法作参考点复归100 设定资料PWE被设定为1,请改为0,并按RESET键101 当机:电源被切断时,编辑操作及储存程序资料内的记忆被改写,这个故障发生时,请将设定资料PWE设定为1,及电源送上同时按著消除键,将记忆清除110 固定小数点显示的资料绝对值超越容许范围111 变量插入计算结果超出(-2到2 -1)112 分配以0被表示(包含tan 90)113 指令MACRO不可使用的指令114 一个未定义的H码,指令于G的单节内115 一个未定义的数值,像一个指定的变量116 P是被禁止指定做为变量的指令118 括号的多重度超过5重127 NC指令和客户自设程序群混在一起128 无分岐点的顺序号码129 使用禁止的位址145 极座标开始或取消的条件不正确146 极座标插位模式中下了不可指令的G码175 圆筒指令开始或取消的条件不正确176 在圆筒插位模式中下了不可指令的G码178 在G41、G42模式指令圆筒插位179 参数579设定的控制轴数超过最大控制轴数200 刚性攻牙的S值在范围外或未指令201 刚性攻牙未指定F202 刚性攻牙主轴的分配量太大203 刚性攻牙M29或S的指令位置不对204 刚性攻牙M29和G84(G74)单节间有轴移动指令205 刚性攻牙指令M29,执行G84(G74)时刚性模式DI信号未ON211 有高速跳跃特殊机能时以每转指令G31212 在Z-X平面以外,指令不可用的指令213 在同步控制轴有移动指令214 同步控制中做座标系设定或平移型刀具补正400 第一轴.第二轴过负载401 第一轴.第二轴速度控制的READY 信号OFF402 第三轴.第四轴过负载403 第三轴.第四轴速度控制的READY 信号OFF404 电源供应接上时,准备完了信号未READY405 需再重新手动原点复归一次410 X轴停止中位置偏差量过大411 X轴移动中位置偏差量过大412 Z轴漂移量过大(超过500 VELO)413 X轴资料设定错误414 X轴数码伺服系统异常,请参考DGN 720号415 X轴CMR设定错误416 X轴位置解码器位置检出异常(断线警示)417 X轴有下列条件之一就造成此警示:参数8120的马达型式设定指定范围外的值参数8122的马达旋转方向未设定正确值(111或-111)参数8123的马达1转速度回馈脉波数,设定小于0的不正确资料参数8124的马达1转速度回馈脉波数,设定小于0的不正确资料420 Z轴停止中位置偏差量过大421 Z轴移动中位置偏差量过大423 Z轴资料设定错误424 Z轴数码伺服系统异常,请参考DGN 721号425 Z轴CMR设定错误426 Z轴位置解码器位置检出异常(断线警示)427 Z轴有下列条件之一就造成此警示:参数8220的马达型式设定指定范围外的值参数8222的马达旋转方向未设定正确值(111或-111)参数8223马达1转速度回馈脉波数,设定小于0参数8224的马达1转速度回馈脉波数,设定小于0430 第三轴停止中位置偏差量过大434 Z轴数码伺服系统异常,请参考DGN 722号437 第三轴有下列条件之一就造成此警示:参数8320的马达型式设定指定范围外的值参数8322的马达旋转方向未设定正确值(111或-111)参数8323马达1转速度回馈脉波数,设定小于0参数8324的马达1转速度回馈脉波数,设定小于0数码伺服系统警示的NO.4X4的详细内容,依X轴、Y(Z)轴、Z轴( C PMC)轴、4 (Y PMC)轴的顺序,显示于诊断号码720、721、722、723:721-723 OVL LV OVC HCAL HVAL DCAL FBAL OFAL7 6 5 4 3 2 1 0OFAL 发生溢量警示FBAL 发生断线警示DCAL 发生回生放电电路警示HVAL 发生过电压警示HCAL 发生异常电流警示OVC 发生过电流警示LV 发生不足电压警示OVL 发生过负载警示PS. 新设参数NO.593-596限界值须设定号码内容说明510X轴过行程,超过(+)行程设定511X轴过行程,超过(-)行程设定512X轴过行程,超过(+)第二行程设定513X轴过行程,超过(-)第二行程设定520Z过行程,超过(+)行程设定521Z轴过行程,超过(-)行程设定522Z轴过行程,超过(+)第二行程设定523Z轴过行程,超过(-)第二行程设定700主基板过热704因检测主轴变动而引起的主轴过热910RAM成对错误(低位址),更换主基板911RAM成对错误(高位址),更换主基板912数码伺服的共有RAM同位错误(LOW)913数码伺服的共有RAM同位错误(HIGH)914数码伺服的地区RAM同位错误920看门狗故障,更换主基板930VPC错误,(不正常中断),更换主基板940有下列诸条件就造成此警示:数码伺服系统的电路板不良控制轴在三轴以上时,却无第三轴控制印刷电路板使用类比伺服用主印刷电路板950保险丝断线警示,请更换 +24E , FX14的保险丝998ROM成对错误--------------------------------------------------------------------------------10T系统(车床)号码屏幕显示内容说明PS 003TOO MANY DIGITS 资料多余的数字被输入PS 006ILLEGAL USE OF NEGATIVE VALUE 符号”-“ 被指定在不能使用符号”-“位址中PS 007ILLEGAL USE OF DECIMAL POINT 一个小数点“.”,被指定在不能使用小数点”.” 位址中PS 010IMPROPER G-CODE 一个不合法的 G码被指定PS 011IMPROPER NC-ADDRESS 一个不合法的位址被指定PS 012INVALID BREAK POINT OF WORD NC界限是在错误PS 013ILLEGAL PROGRAM NO. POSITION 位址O或N被指定在不合法的位址PS 014ILLEGAL PROGRAM NO. FORMAT 位址O和N后面不跟著一个数值PS 015TOO MANY WORDS IN ONE BLOCK 一个单节中所使用的字元数目超出容许范围PS 016EOB NOT FOUND 单节结束码是失去在程序结束点之任一MDI 模式中输入PS 017ILLEGAL MODE FOR GOTO/WHILE/DO GOTO叙述或WHILE-DO叙述是在MDI或纸带模式主程序被使用PS 058S-COMMAND OUT OF RANGE 主轴速度超出最大回转速设定PS 060SEQUENCE NUMBER NOT FOUND 在顺序号码寻找中没有找到所指定的顺序号码PS 061NO P,Q COMMAND AT G70-G72 在指定的固定循环G70,G71,G72中无P和 QPS 062ILLEGAL COMMAND IN G70-G76 指令在固定循环G70中,G65单节是不合适的PS 063P,Q BLOCK NOT FOUND 在固定循环G70,G71,G72单节中找不到指定的P或Q顺序号码PS 065ILLEGAL COMMAND IN P-BLOCK 在G70,G71,G72单节中找不到指定的P顺序号码中的一个指令PS 066ILLEGAL COMMAND IN PROGRAM 设计G70,G71,G72指定顺序号码单节P和Q中,使用了超出G码01群中的指令PS 067G70-G73 AT FORBIDDEN MODE 在超出记忆模式中指定中指定G70,G71,G72,G73PS 069ILLEGAL COMMAND IN Q-BLOCK 在G70,G71,G72中指定Q 顺序号码单节中使用倒角及倒圆弧PS 076PROGRAM NOT FOUND 由程序所使用在M98,G65,G66的程序号码呼叫中,G/M/T码是找不到PS 077PROGRAM IN USE 程序正在使用中PS 090DUPLICATE NC MACRO STATEMENT NC叙述及自设程序叙述指令在同一单节PS 091DUPLICATE SUB-CALL WORD 在一单节中副程序呼叫指令使用二次以上PS 092DUPLICATE MACRO-CALL WORD 在一单节中自设程序呼叫指令使用二次以上PS 093DUPLICATE NC-WORD & M99 一超出O,N,P,L的位址被指定在同样的单节,如跟随在自设程序模块呼叫M99PS 094USE “G” AS ARGUMENT G被使用在引数中PS 095TOO MANY TYPE-2 ARGUMENT 用户自设程序引数第二类中,指定超过11组PS 100CANCEL WITHOUT MODEL CALL G67被指定在无模块呼叫的G66中PS 110OVERFLOW:INTEGER 运算处理超过范围PS 111OVERFLOW:FLOATING 运算处理超过二进制浮点范围PS 112ZERO DIVIDE 除算中指定使用零除数PS 114VARIABLE NO. OUT OF RANGE 一个不合适的变量号码被指定PS 115WRITE PROTECTED VARIABLE 一个有资格的变量在右记忆的表示被许可在左记忆表示中PS 116READ PROTECTED VARIABLE 一个有资格的变量在左记忆的表示被许可在右记忆表示中PS 118TOO MANY BRACKET NESTING 括号重覆数超出许可范围PS 119ARGUMENT VALUE OUT OF RANGE 一机能中的引数超出容许范围PS 121TOO MANY SUB, MACRO NESTING 副程序及MACRO呼叫超出容许范围PS 122TOO MANY MACRO NESTING MACRO呼叫之次数超出容许范围PS 123MISSING END STATE-MENT DO指令跟随不足的END指令PS 124MISSING DO STATE-MENT 使用END指令不足的DO指令PS 125ILLEGAL EXPRESSION FORMAT 说明格式是不适合的PS 126ILLEGAL LOOP NO. DO和END号码超出容许范围PS 128SEQUENCE NO. OUT OF RANCE 顺序号码超出1-9999PS 131MISSING OPEN BRACKET 左括号数量不足PS 132MISSING CLOSE BRACKET 右括号数量不足PS 133MISSING “=” 指令”=”遗失PS 134MISSING ”/” 指令”/”遗失PS 135MACRO STATEMENT FORMAT ERROR MACRO叙述格式错误PS 136DFA STATEMENT FORMAT ERROR MACRO DFA叙述格式错误PS 137IF STATEMENT FORMAT ERROR MACRO IF叙述格式错误PS 138WHILE STATEMENT FORMAT ERROR MACRO WHITE叙述格式错误PS 139SETVN STATEMENT FORMAT ERROR MACRO SETVN叙述格式错误PS 141ILLEGAL CHARACTER IN VAR. NAME 在SETVN叙述中变量名称`,给予不适当字元PS 142TOO LONG VARIABLE NAME 变量名称太长PS 143BPRNT/DPRNT STATE-MENT FORMAT 叙述格式错误PS 144G10 FORMAT ERROR 有一错误在G10格式中PS 145G10.1 TIME OUT PMC到G10.1指令时间太长PS 146G10.1 FORMAT ERROR 有一错误在G10.1格式中PS 150A/D CONVERT ALARM A/D转换器失效PS 151A/D CONVERT ALARM A/D转换器失效PS 180ALL PARALLEL AXES IN PARKING 所有的并列轴放置在同一位址PS 181ZERO RETURN NOT FINISH 未完成原点复归PS 182CIRCLE CUT IN RAPID F0被指定在圆弧模式PS 183TOO MANY SIMUL-TANEOUS CONTROL AXES 移动指令超过可以同时控制轴数PS 184TOO LARGE DISTANCE 移动值超过最大指定值PS 185ZERO RETURN CHECK (G27) ERROR G27没有回到原点PS 186ILLEGAL PLANE SELECT 错误的平面选择PS 187FEED ZERO (COMMAND) 切削进给F指令为零PS 188FEED ZERO (DRY RUN) F值之参数值是设定为零PS 191OVER TOLERANCE OF RADIUS 圆弧半径值的起点和终点之差大于参数设定值(参数2410)PS 192ILLEGAL LEAD COMMAND (G34) G34切削中螺距的增减量K超过最大指令值PS 195ILLEGLE AXIS SELECTED (G96) G96之P值或参数5670是错误PS 196ILLEGAL DRILLING AXIS SELECTED 选择的搪孔轴是不正确的PS 200PULSE CODER SYNCHRONOUS ERROR 位置检知器一回转信号未出现PS 270OFFSET C START UP CANCEL BY CIR. 刀尖半径补正是产生在开使或削除于圆弧模式PS 271OFFSET C ILLEGAL PLANE 搪孔刀尖补正指定于平面上PS 272OFFSET C INTER-FERENCE 太多的切削工作加在刀尖补正PS 299OFFSET C NO SOLUTION 在刀尖半径补正上没有交点PS 300ILLEGAL ADDRESS 一不合适的位址指定在从纸带输入参数或螺距补正资料PS 301MISSING ADDRESS 无位址指定在从纸带输入参数或螺距补正资料PS 302ILLEGAL DATA NUMBER 指定的资料号码产生错误PS 303ILLEGAL AXIS NUMBER 纸带输入参数值产生错误PS 304TOO MANY DIGITS 资料的数字位数超过容许值PS 305DATA OUT OF RANGE 资料值超过容许范围PS 306MISSING AXIS NUMBER 无轴号码指定PS 307ILLEGAL USE OF MINUS SIGN 使用的资料符号中是不合适的PS 308MISSING DATA 一个位址没有跟随一个数值PS 400PROGRAM NOT WATCH 纸带程序没有相称之程序PS 410G37 IMPROPER AXIS COMMAND G37中没有指定轴或超过二轴PS 413G37 SPECIFIED WITH T-CODE G37中T码被指定PS 414G37 OFFSET NO. UNASSIGNED G37中没有指定T码PS 415G37 ARRIVAL SIGNAL NOT ASSERTED G37中测量位置到达信号开始ON或在结束点未开使ONPS 426TOO MANY ADDRESS 超过二个I,K,R被指定在倒圆角PS 427NOT ONE AXIS MOVE WITH I ~ R I(K)被指定和X(Z)轴在倒角或倒圆弧角的单节指令中PS 428MISMATCH AXIS WITH I~ R I(K)被指定和X(Z)轴在倒角或倒圆弧角的单节指令中PS 429MISSING VALUE AT I ~ R 跟随倒角或倒圆弧角单节指令之移动距离少于倒角或倒圆弧角值PS 430CODE IS’NT G10 AFTER I ~ R 跟随在倒角或倒圆弧角单节之后的指令不是G10PS 431MISSING MOVE AFTER I ~ R 在旧的倒角或倒圆弧角单节指令的方向或移动距离之指令不正确--------------------------------------------------------------------------------号码萤幕显示讯息内容SR 590TH ERROR TH警示SR 591TV ERROR TV警示SR 592END OF RECORD 记录结束被指定在单节中途SR 600PARAMETER OF RESTART ERROR 在程序再启动之参数有一错误SR 805ILLEGAL COMMAND 一不合适指令企图指定在RS 232C,RS422,PTR界面SR 806DEVICE TYPE MISS MATCH 一件不能被动作的I/O装置选择,被设定了SR 807PARAMETER SETTING ERROR 一I/O界面不被指定选择在选择性或设定值SR 810PTR NOT READY PTR准备完成信号切除SR 812OVER-RUN ERROR(PTR) 在PTR读入接收一字元前下一字元被接收到SR 830DATA SET READY DOWN RS-232C-2准备完成信号切除SR 831CARRIER DETECT DOWN RS-232C-2信号特质检出信号切除SR 832OVER-RUN ERROR RS-232C-2读入接收一字元前下一字元被接收到SR 833FRAMING ERROR RS-232C-2接收一字元时之停止位元未被检出SR 834BUFFER OVERFLOW 在NC由RS232C-2接收资料时在送出停止码前,资料超过10字元被接收SR 840DATA SET READY DOWN RS-232C-3准备完成信号切除SR 841CARRIER DETECT DOWN RS-232C-3信号特质检出信号切除SR 842OVER-RUN ERROR RS-232C-3读入接收一字元前下一字元被接收到SR 843FRAMING ERROR RS-232C-3接收一字元时之停止未元未被检出SR 844BUFFER OVERFLOW 在NC由RS232C-3接收资料时在送出停止码前,资料超过10字元被接收SR 850DNC NOT READY DNC准备完成信号切除SR 852OVER-RUN ERROR DNC接收一字元前下一字元被接收到SR 860DATA SET READY DOWN 20MA电流回路准备完成信号切除SR 861CARRIER DETECT DOWN 20MA电流回路信号特质检出信号切除OVER-RUN ERROR 20MA电流回路读入接收一字元前下一字元被接收到SR 863FRAMING ERROR 20MA电流回路接收一字元时之停止未元未被检出SR 864BUFFER OVERFLOW (AFR33/44) 20MA电流回路接收资料时在送出停止码前,资料超过10字元被接收SR 870DATA SET READY DOWN RS-422准备完成信号切除SR 871CARRIER DETECT DOWN RS-422信号特质检出信号切除SR 872OVER-RUN ERROR RS-422读入接收一字元前下一字元被接收到SR 873FRAMING ERROR RS-422接收一字元时之停止未元未被检出SR 874BUFFER OVERFLOW RS-422接收资料时,在送出停止码前,资料超过10字元被接收--------------------------------------------------------------------------------号码萤幕显示讯息内容OH 000 MOTOR OVERHEAT 伺服马达过热OH 001 LOCKER OVERHEAT NC电气箱过热--------------------------------------------------------------------------------号码萤幕显示信息SB 010GRAPHIC ROM PARITY 在绘图用之ROM产生一同位错误SB 011GRAPHIC ROM PARITY (WORK) 在绘图用工作之ROM产生一同位错误SB 011GRAPHIC ROM PARITY (RED) 在绘图用红色之ROM产生一同位错误SB 011GRAPHIC ROM PARITY (GREEN) 在绘图用绿色之ROM产生一同位错误SB 011GRAPHIC ROM PARITY (BLUE) 在绘图用蓝色之ROM产生一同位错误--------------------------------------------------------------------------------号码萤幕显示信息内容SW 000PARAMETER ENABLE SWITCH ON 参数表8000设定为 1SW 010BUBBLE FREE MODE AVAILA BLE 磁泡记忆自由模式之开关被ON--------------------------------------------------------------------------------号码萤幕显示信息内容OT 001+ OVERTRAVEL (SOFT 1) 正方向过行程OT 002- OVERTRAVEL (SOFT 1) 负方向过行程OT 003+ OVERTRAVEL (SOFT 2) 正方向过行程OT 004- OVERTRAVEL (SOFT 2) 负方向过行程OT 005+ OVERTRAVEL (SOFT 3) 正方向过行程OT 006- OVERTRAVEL (SOFT 3) 负方向过行程OT 007+ OVERTRAVEL (HARD ) 正方向极限开关被导通OT 008- OVERTRAVEL (HARD ) 负方向极限开关被导通OT 021+ OVERTRAVEL (PRE-CHECK) 移动前之行程检查中正方向过行程OT 022- OVERTRAVEL (PRE-CHECK) 移动前之行程检查中负方向过行程OT 100SPINDLE ALARM 主轴马达警示故障OT 101SPINDLE MOTOR OVERHEAT 主轴马达已过热OT 102EXCESS VELOCITY ERROR 指令速度与时际速度误差过大OT 103FUSE F7 BLEW F7保险丝烧毁OT 104FUSE F1,F2,OR F3 BLEW F1,F2,或F3保险丝被烧毁OT 105FUSE AF2 OR AF3 BLEW AF2或AF3保险丝被烧毁OT 106EXCESS VELOCITY (ANALOG) 主轴马达速度超过最大值(类比) OT 107EXCESS VELOCITY (DIGITAL) 主轴马达速度超过最大值(数码) OT 108VOLTAGE (+24V)TOO HIGH 24V电压超过指定值OT 109POWER SEMICONDUCTOR OVERLOAD 动力半导体已过热OT 110VOLTAGE (+15V)TOO LOW 15V电压超过指定值OT111VOLTAGE EXCESS (DC LINK) DC连结电压已超过OT 112CURRENT EXCESS (DC LINK) DC连结电线已超过OT 113CPU ERROR CPU或外围电路已失常OT 114ROM ERROR ROM已失效OT 115OPTION ALARM 主轴马达之辅助警示OT 116DISCONNECTION POS. CODER 位置检知器被检出到未连结上OT 120UNASSIGNED ADDRESS (HIGH) I/O界面位址信号之高位元4位数未被指定具名位址OT 121UNASSIGNED ADDRESS (LOW) I/O界面位址信号之低位元4位数未被指定具名位址OT 122TOO MANY MESSAGE 超过5个或以上之讯息被要求警示OT 123MESSAGE NUMBER NOT FOUND 讯息号码是不合适的OT 124OUTPUT REQUSET ERROR 输出要求被再次要求送出外部资料输出,或输出要求动作在一无给予输出资料之位址OT 125TOO LARGE NUMBER 一不属于0-999的数字被指定OT 126SPECIFIED NUMBER NOT FOUND 指定的程序号码或顺序号码未寻获OT 127DI.EIDHW OUT OF RANGE 输入值超过可能之范围OT 128DI.EIDLL OUT OF RANGE 输入值超过可能之范围OT 129NEGATE POS. CODER 1 REV. ON CPU或位置检知之外围线路不正常OT 130SEARCH REQUSET NOT ACCEPED 程序号码或顺序号码查找不被受理--------------------------------------------------------------------------------号码萤幕显示信息内容PC 010PC ERROR PC ROM同位错误产生PC 020PC ERROR PC RAM同位错误产生PC 030PC ERROR I/O单元不被正确分配PC 500WATCH DOG ALARM PC监视错误产生PC 510MIC TYPE MISS MATCH MIC之型式之PC指定不匹配--------------------------------------------------------------------------------号码萤幕显示信息内容SV 000TACOGENERATOR DIS-CONNECT 转速发电机未连结警示被检出SV 001MOTOR OVERLOAD 伺服马达过负载SV 002VELOCITY-UNIT BRAKER OFF 速度控制电路断路器被跳开SV 003EXCESS CURRENT IN SERVO 过电流SV 004EXCESS VOLTAGE IN SERVO 过电压SV 005EXCESS DISCHARGE CURRENT 过量泄放电流SV 006VELOCITY-UNIT POWER TOO LOW 电压过低SV 008EXCESS ERROR (STOP) 位置偏差量超过参数1829设定SV 009EXCESS ERROR (MOVING) 位置偏差量超过参数1828设定SV 010EXCESS DRIFT COMPEN-SATION 漂移量过大(超过500 VELO) SV 011LSI OVERFLOW 位置偏差量超过正负32767SV 012MOTION VALUE OVERFLOW 速度超过512K脉波/秒被指定SV 013IMPROPER V-READY OFF 位置控制准备完成信号已切入时,速度控制准备完成信号被切除SV 014IMPROPER V-READY ON 位置控制准备完成信号已切除时,速度控制准备完成信号被切入SV 015PULSE CODER DIS-CONNECT 脉波解码器被检出未连结上SV 017ILLEGAL POSITION CONTROL LSI 位置控制LSI被检知问题发生SV 018UNFIT DSOG FREQUENCY 分解器或感应器回授频率检查中一错误被检出SV 019UNFIT PULSE OF PULSE CODER 从脉波解码器回授频率检查中一错误被检出SV 020UNFIT FASE SHIFT VALUE 分解器或感应器可能产生不正确相移量UNFIT PULSE CODER 1 REV .ON 脉波解码器之一回转信号在不正常位置产生SV 022PULSE CODER 1 REV . MISSING 脉波解码器之一回转信号在正确范围内未产生SV 023SV OVERLOAD 伺服马达过负荷SV 025V-READY ON (INITIALIZING) 速度控制准备完成信号SV 026ILLEGAL AXIS ARRANGE 参数1023之伺服轴排列未能适当设定SV 030EMERGENCY STOP 紧急停止已动作--------------------------------------------------------------------------------号码萤幕显示信息内容IO 000BUBBLE DATA BUS PARITY ERROR 一同位错误在磁泡记忆汇流排中被检出IO 001BUBBLE TIME OUT ERROR 读/写时间超过IO 002BUBBLE ILLEGAL COMMAND ISSUED 一无意义的指令被写入IO 003BUBBLE TRANSFER MISSING 磁泡记忆资料传送不正常IO 010BUBBLE MAP LOOP BROKEN 磁泡记忆图表已崩裂BUBBLE IS ERASED OR UNLOADED 磁泡记忆被消除或无法写入IO 020BUBBLE TOO MANY PARITY PAGES 一位元同位错误产生,页数超过16页IO 021BUBBLE DATA PARITY ERROR 读出时间位元错误被检出IO 022BUBBLE WITH PROTECTED 磁泡记忆被保护IO 030CHECK SUM ERROR NC记忆内之页单元检查和错误IO 031INVALID CODE 一无用的指令由NC记忆内读出IO 032MEMORY ACCESS OVER RANGE 企图从超出NC记忆范围之位址中写入资料或读入资料。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
21.031号报警报警信息: "Illegal P command in G10",G10指令中非法P命令。
报警说明: 在用G10设定补偿数值中,跟随地址的P补偿号不超出或者没有指定。
修改程序。
22.032号报警报警信息: "Illegal offset value in G10",G10指令中非法补偿值。
报警说明:在用G10设定补偿数值中或者用系统变量写入一个补偿数值时,补偿数值超出。
23.033号报警报警信息: "No solution at CRC",在CRC上不能计算。
报警说明: 刀尖半径补偿后交点计算不出来。
修改程序。
24.034号报警报警信息: "No circ allowed in ST-UP/EXT BLK",在启动、取消块中不允许循环。
报警说明:在G02和G03方式下,正在启动或者取消刀尖半径补偿。
修改程序。
25.035号报警报警信息: "Can not commanded G31",不能使用指令G31。
报警说明: 在刀具刀尖报警补偿方式指定了跳跃切削 (G31)。
26.037号报警报警信息: "Can not change plane in NRC",在NRC方式时,不能变换平面。
报警说明: 在刀尖半径补偿中,切换了补偿平面。
27.038号报警报警信息: "Interference in circular",圆弧干涉。
报警说明: 因为圆弧起点或者终点与中心重合,导致刀具半径补偿时过切削。
28.039号报警报警信息: "CHF/CNR not allowed in NRC",在NCR方式不允许CHF/CNR。
报警说明: 在刀具刀尖半径补偿中,启动、删除和G41/G42更换时,使用了倒角或者拐角指令。
在倒角或者拐角可能引起过切削。
修改程序。
29.040号报警报警信息: "Interference in G90/G94 block",在G90/G94程序块中干涉。
报警说明: 在单一固定循环G90/G94的刀尖R补偿中可能生产过切现象。
30.041号报警报警信息: "Interfence in NRC",NRC干涉。
报警说明:在刀具刀尖补偿后,将过切削。
31.046号报警报警信息: "Illegal reference return command",非法返回参考点命令。
报警说明:不是使用P2、P3、P4指令返回第2、第3、第4轴参考点。
32.050号报警报警信息: "CHF/CNR not allowed in thread BLK"在螺纹程序块中不允许CHF/CNR。
报警说明:在螺纹切削的程序块中,使用了倒角或者拐角指令。
修改程序。
33.051号报警报警信息: "Missing move after CHF/CNR",CHF/CNR运动丢失。
报警说明:在倒角或者拐角的下一个程序块,指定了不正确的运动或者运动的距离不对。
修改程序。
34.052号报警报警信息: "Code is not G01 after CHF/CNR",CHF/CNR之后不是G01码。
报警说明:倒角或者拐角的下一个程序块不是垂直线。
修改程序。
35.053号报警报警信息: "Too many address commands",太多地址命令。
报警说明: 在倒角和拐角R命令中,两个或者更多的I、K和R被指定,另外,在直接输入图纸尺寸中,在逗号","后面的字符不是C或R。
修改程序。
36.054号报警报警信息: "No taper allowed after CHF/CNR",CHF/CNR之后不允许锥度。
报警说明:指定了角度或者拐角的倒角程序块中包含了锥度指令。
修改程序。
37.055号报警报警信息: "Missing move value in CHF/CNR",CHF/CNR中丢失运动数值。
报警说明: 在倒角或者拐角的程序块中,运动距离小于倒角或者拐角R的数值。
修改程序。
38.056号报警报警信息: "No end point & angle in CHF/CNR",CHF/CNR中没有结束点和角度。
报警说明:在下一个程序块,只指定角度(A),既没有结束点,也没有角度设定。
修改程序。
39.057号报警报警信息: "No solution of block end",块结束没有计算。
报警说明: 在图纸尺寸直接输入中,不能正确计算出程序段的终点。
40.058号报警报警信息: "end poin not found",结束点没有发现。
报警说明: 在图纸尺寸直接输入中,找不到程序段的终点。
修改程序。
41.059号报警报警信息: "Program number not found",程序号没有发现。
报警说明:在外部程序号搜索时,指定的程序号找不到。
另外一个要搜索的程序被后台编辑。
检查程序号或外部信号,或者停止后台编辑。
42.060号报警报警信息: "Sequence number not found",顺序号没有发现。
报警说明: 在顺序号搜索时,没有发现顺序号。
检查顺序号。
43.061号报警报警信息: "Address P/Q not found in G70-G73",在G70-G73指令中,没有发现P/Q 地址。
报警说明: 在指令G70、G71、G72、G73指令中没有指定地址P和Q。
44.062号报警报警信息: "Illegal command in G71-G76",在G71-G76指令中,非法指令。
报警说明: 在下列情况下出现这个报警:①G71或G72的切削深度是0或者负值;②G73指令中重复计数是0或者负值;③在G74或者G75指令中,△i或者△k指定为0或者负数;④在G74或者G75指令中,虽然△i或者△k为0,但地址U或者W不是0;⑤△d被指定为负数,虽然G74或G75决定了方向;⑥螺纹高度或者G76的第一次切削深度是0或者负数;⑦G76设定的最小切削深度比螺纹高度大;⑧在G76指令中设定了一个不能使用的刀尖角度。
修改程序。
45.063号报警报警信息: "Sequence number not found",顺序号没有发现。
报警说明: 在指令G70、G71、G72、G73中,地址P指定的顺序号没有找到。
修改程序。
46.064号报警报警信息: "Shape program not monotonously",形状程序不能太单调。
报警说明: 不能由单纯加工程序加工出的目标形状在固定循环G71、G72中出现。
47.065号报警报警信息: "Illegal command in G71-G73",在G71~G73指令中,非法指令。
报警说明: 下列情况出现这个报警:①在由G71、G72或者G73指令中P地址指定顺序号的程序块里,没有指令G00或G01;②在由G71或G72分别指定顺序号的程序块中,使用了地址Z(W)或X (U)指令。
修改程序。
48.066号报警报警信息: "Impoper G-code in G71-G73",在G71~G73指令中,使用了不恰当的G指令。
报警说明:在G71、G72或者G73指令中,具有P地址的两个程序块之间,使用了不允许的G代码。
49.067号报警报警信息: "Can not error in MDI mode MDI",MDI方式时程序错误。
报警说明:G70、G71、G72或G73指令使用了P和Q地址。
50.068号报警报警信息: "Ten or more pockets",10个或者更多凸凹面。
报警说明:对于G71、G72指令的类型Ⅱ,凸凹平面数等于或者多于10个。
51.069号报警报警信息: "Format error in G70-G73",G70~G73指令格式错误。
报警说明:在使用含有P和Q的G70、G72或者G73指令的程序块中,指定的最终运动指令结束时,具有倒角或者拐角R。
修改程序。
52.070号报警报警信息: "No program space in memory",在存储器里没有存储空间。
报警说明:存储区域不够。
删除不需要的程序,然后再试。
53.071号报警报警信息: "Data not found",数据没有发现。
报警说明:要搜索的地址没有发现或者在程序搜索中,具有特殊程序号的程序有找到。
检查数据。
54.072号报警报警信息: "Too many programs",程序太多。
报警说明:存储的程序超过63(基本)、125(选件)、200(选件)。
删除无用的程序,执行程序再登记。
55.073号报警报警信息: "Program number already in use",程序号已经在用。
报警说明:要执行的程序号已经使用。
变换程序号或者删除无用的程序,执行程序再登记。
56.074号报警报警信息: "Illegal program number",非法程序号。
报警说明:程序号不是1~9999。
57.076号报警报警信息: "Address P not defined",地址P不能定义。
报警说明:在M98、G65、G66指令中,没有使用地址P。
修改程序。
58.077号报警报警信息: "Sub program nesting error",子程序嵌套错误。
报警说明:子程序调用超出极限。
59.078号报警报警信息: "Number not found",程序号没有发现。
报警说明: 在M98、M99、G65或G66的程序块中,没有找到用P指定的程序号或者顺序号。
由GOTO指令指定的顺序号没有发现或者调用了一个后台编辑的程序。
修改程序或者停止后台编辑。
60.079号报警报警信息: "Program verify error",程序验正错误。
报警说明:在存储器中或整理程序中,从外部装置读入的程序与存储器里的程序不一致。