第4章陀螺稳定平台
稳定平台中陀螺漂移自适应实时估计算法_张智永

9] 图 2 陀螺稳定平台伺服控制系统结构 [
r o l a t f o r m9 F i . 2 S t r u c t u r e o f s e r v o c o n t r o l s s t e m o f s t a b i l i z e d - - g y p g y
[ ] 3 7 -
, 进行了广泛的研究并取得一定的效
果 。 但就稳定平 台 漂 移 补 偿 而 言 , 还存在如下问 题: 如 低 通 滤 波、 卡尔曼滤 ① 各类信号处理手段, 波、 前向线性预测滤波( F o r w a r d L i n e a r P r e d i c - , 、 小 波 滤 波, 均是抑制陀螺噪声 t i o n F i l t e r F L P) , 的中高频信号 对补偿陀螺常值漂移作用不大 ; ② 从短期来看 , 陀螺常值漂移为固定随机数 , 但长期
。 陀螺作为稳定平台核心测量元件 , 其误
差对平台性能有 很 大 影 响 , 如陀螺常值漂移会造 陀螺相关漂移会 成平台漂移随时 间 呈 线 性 增 长 , 造成平台漂移的随机游走 。 而平台漂移会带来图 像的 扰 动 , 进而造成目标搜索、 捕 获、 跟踪和瞄准 因此必须对陀螺误差进行补偿 。 的困难 , 国内外专家学 者 针 对 陀 螺 误 差 的 分 析 、 建模 和补偿
J u n . 2 5 2 0 1 2V o l . 3 3N o . 6 1 0 4 4 1 0 5 1 - / I S S N 1 0 0 0 6 8 9 3 N 1 1 1 9 2 9 V - C -
稳定平台中陀螺漂移自适应实时估计算法
张智永 * ,周晓尧 ,范大鹏
国防科学技术大学 机电工程与自动化学院 ,湖南 长沙 4 1 0 0 7 3
基于连续旋转的陀螺稳定平台漂移动态标定新方法

Co n t i n u o u s Ro t a t i o n
L i u J i e y u , Yu Zh i y o n g , Z h o u Xi a o g a n g
( D e p a r t me n t o f A u t o c o n t r o l , T h e S e c o n d A r t i l l e r y E n g i n e e r C o l l e g e , Xi ’ a n , 7 1 0 0 2 5 )
摘要 :平 台漂移误差标定是保证惯导 系统精度 的基本措施之一 。针对 陀螺稳定平 台漂移 系数标定 问题 ,提 出一种新 的动
态标定方法,可标定 陀螺仪的 9个误差 系数。不借助 于外部精 密转 台,利用 陀螺平台 自身系统 ,控制平 台台体绕某轴连续转
动 ,分 离其他 两轴所对应 陀螺的漂移 系数 。从机 理上 分析 陀螺平台漂移 动态标定误差模型 建立及标 定方法,对标 定误 差做 了 详 细分析 ,提 出减 小或消除 系统误差的措施 ,为提 高标定精度提供 了依据 。
2 0 1 3年第 6期 总第 3 2 9 期
文章 编号 : 1 0 0 4 - 7 1 8 2 ( 2航 天 运 载 技 术
MI S S I LE S AND S P ACE VE Hl CL ES
NO . 6 2 0 1 3 S u m No . 3 2 9
O 引 言
陀螺 稳定 平 台是 导航 系统 核心 部件 ,其 漂 移 的大
法p J ,但 都是基 于位 置标定 的方法 。比如 文献 [ 3 ] 提 出
基 于 平 台台体 翻滚 十六 位 置 的多位 置测 漂方 法 ,且 要
基于ADAMS和Matlab的陀螺稳定平台机电联合仿真

3.5 陀螺稳定平台

M s = Kα p = M d
式中 K 为稳定回路的总放大系数, αp 为平台绕稳定轴相对惯性空间 的偏差角。
改写上式可得到平台绕稳定轴的稳态误差角
αp =
Md K
由此可见,为了使平台具有足够高的精度,即稳态误差角很小,稳定 回路应具有足够大的放大系数。
2、空间稳定状态
要是平台绕稳定轴以指令角速度 ω c 相对惯性空间主动跟踪空间某 一变化的基准(如跟踪水平面或子午面) ,则应给陀螺内环轴上的力 其大小与指令角速度 ω c 成比例。该电流使 矩器输入一个指令电流 I c , 力矩器产生一个沿陀螺内环轴方向的指令力矩 M c ,在 M c 的作用下, 陀螺绕外环轴进动。因为此时平台基座没有运动,所以陀螺绕外环轴 相对平台的角速度就等于陀螺在 M c 作用下绕外环轴相对惯性空间的
2.3 由二自由度积分陀螺组成的单轴系统
平台可随平台稳定轴相对基座转动。平台上装有一个双自由度陀 螺,外环轴与稳定轴平行,在外环轴上装有信号器,内环轴上装有力 矩器。信号器、放大器和稳定电机组成稳定回路。
图 二自由度陀螺单轴平台原理
1、几何稳定状态
当干扰力矩 M d 沿稳定轴作用到平台上时,将引起平台以角速度
M g = M c = Kt I c
式中 K t 为力矩器传递系数。 陀螺进动时产生的陀螺力矩为
p M g = Hωc = Hα
则
p = α
Kt Ic H Kt Ic dt H
α p = α0 + ∫
式中 α 0 为 t=0 时刻平台相对惯性参考系的初始偏角。 由此可见,在指令电流的作用下,平台相对惯性参考系的转角 α p 与指令电流的积分成正比。 故可以利用力矩器的输入电流 I c 来控制平 台的转动,使平台按照所需要的规律相对惯性空间转动。如果令指令 力矩
硕士学位论文光电吊舱控制系统设计...
光电吊舱控制系统设计及实现主盎学校代码:学号:后舅次擎硕士学位论文光电吊舱控制系统设计及实现院系: 信息学院专业: 电路与系统姓名: 侯卫国王指导教师:勇副教授完成日期:年月日摘要摘要光电吊舱作为真升机的核心载荷,在军事、民用领域具有广阔的应用前景, 其相关产品的研制开发也备受重视。
光电吊舱控制系统作为光电吊舱的核心控制部件具有巨大的研究价值和广泛的应用前景。
本文首先阐述了选题的背景,研究的目的和意义,介绍了光电吊舱的结构及特点。
分析讨论了传统光电吊舱两框架结构的缺点,接着详细给出了改进的四框架控制系统。
其次,构建了吊舱控制系统架构,将光电吊舱设计模块化,通过建立系统数学模型分析了系统控制策略,并根据系统控制指标,设计出系统控制器。
然后,根据模块化设计思想完成了光电吊舱控制电路的设计综合,并详细给出了各个单元电路的设计思想和实现。
最后,利用先进的软件设计理念详细分析了嵌入式实时操作系统在光电吊舱软件设计中的应用,设计了图像处理系统软件设计和舱务管理系统软硬件设计。
根据设计和实现的光电吊舱各个模块,构成了光电吊舱原理样机。
该样机测试结果表明:提出的设计方法和技术是合理的,能满足光电吊舱的应用要求。
并为今后的光电吊舱控制系统的研制工作提供了很好的基础。
关键词:光电吊舱、四框架结构、控制、嵌入式实时多任务操作系统..., ,..?,.? . .,,. ,... ... .? .,,:,第章绪论第章绪论.引言直升机要在空中完成对目标的探测和跟踪任务,需要一个机载平台和一个搭载在该平台上的由探测设备组成的集成系统,在硬件表现形式上称之为吊舱。
一般来说,吊舱是指悬挂在运动载体如飞机、船舶外的舱体有效载荷容器装置, 根据内置设备的功能,机载吊舱可以分为导航吊舱、瞄准吊舱、红外测量吊舱、电子干扰吊舱及电子情报吊舱等。
直升机机载光电吊舱年来在国外发展很快,特别是在侦察告警、目标指示、控制瞄准和导航跟踪等方面得到广泛地重视。
惯性导航系统原理_三轴陀螺稳定平台(4)

0 0 1
ωωiirrffxy
ωiaaz
环架角速度
sinθr sinθ f sinθa + sinθr sinθ f cosθa
0 0
cosθr sinθ f sinθa
cosθr
sinθ f
cos
θa
ωωiibbbbyx
0
T3 0
0
ωibbz
基座角速度
2010.05.21
10
5.2.1角速度耦合关系分析
=
−ωωiffixffxcsoisnθθaa
+
ωr iry
cosθ
f
+
ωr iry
cosθ
f
sin θ a cosθa
ωiaaz
ωa iaz
ωωiiaaaaxy
=
ωf ifx
cosθa
−ωiffx sin θa
+
ωf ify
+
ωf ify
sin θ a cosθa
ωiaaz
f
+
ωb ibx
sin
θr
sinθ f
+
ωb ibz
cosθr sinθ f
ωωiiffffyx
=
ωiffz
ωr iry
ωr irx
cosθ f
+ θ&f
+
ωr irz
sinθ
f
−ωirry sinθ f
+
ωr irz
cosθ
f
2010.05.21
ωωiirrrrxy
=
ωibbx
0
sinθ f
光纤陀螺仪在稳定平台上的应用
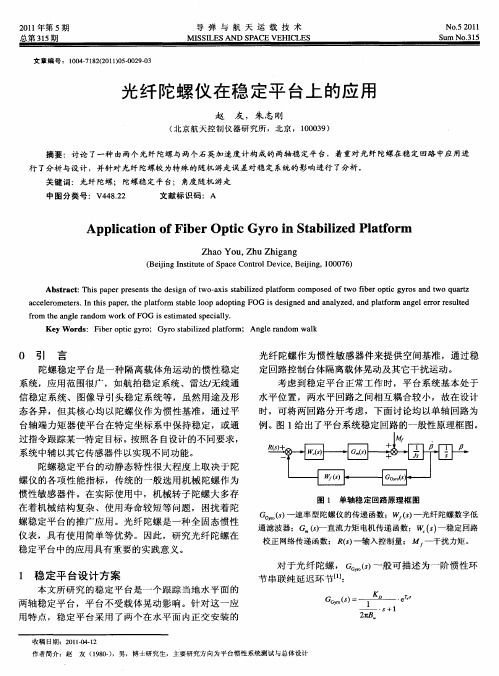
好 ,陀 螺噪 声基 本不 会影 响 到稳 定回 路 的动 态特 性 ,
可 以满足 设计 的稳定要 求 。
通常 中等精度 的光 纤陀螺 带宽在 2 0Hz以上 ,延 0 迟 时 间在 微秒 量级 ,因此 ,在 实际应 用 中可根 据性 能 要 求对传递 函数进 行化 简 ,一 般取 G0( K 。 F o G)
其 中陀螺仪 的噪 声是主 要成分 , 图 3后 4S 在 时间 中可 以明显看 到这一 噪声对 稳定平 台角度 的影 响。 由光 纤 陀螺 的物理 特 性可 知 ,陀 螺噪 声可近 似为
角速 度 白噪 声与 一个 缓变 函数 的合 成 。在角 速 度 白噪
声 的驱 动下 ,平 台角度 偏 差将 具有 随机 游动 的特 性 , 在其 角度 真值 附近 随机 徘 徊 ,这一 角度 误 差定 义为光 纤 陀螺 的角度 随机游走 ( 删 ) 。AR 主要来 源 陀螺 W 仪光 路【, 生机理 复杂 , 节主 要关注 这一误 差特性 3 产 】 本
收稿 日期 :2 1-4 1 0 10 .2 作者 简介 :赵 友 (9 0) 1 8 一 ,男 ,博士 研究 生 ,主要研 究 方 向为平 台惯 性系 统测 试与 总体 设计
u — … =g G —D 广
2 柏
导 弹 与 航 天 运 载 技 术
2 1 年 01
式 中
为直流 增益 ; 为频 带 宽度 ; 为延迟 时间 。
0 引 言
陀螺 稳定 平 台是 一种 隔 离载 体 角运 动 的惯 性 稳 定 系 统 ,应用 范 围很广 ,如航 拍稳 定 系统 、雷 达/ 线通 无 信 稳定 系 统 、 图像 导 引头 稳 定系 统等 ,虽然 用 途及 形 态 各异 ,但 其 核心 均 以陀螺 仪作 为惯 性 基准 ,通 过平
陀螺稳定平台模糊自调整滑模解耦控制

f m, zysl ajsn l igm d ot l lo tm w s ein d ae nted frni e m — o r a uz e -dut gsdn o e nr grh a s e .B sdo iee t l o e f f i i c oa i d g h f ag
g i a c e d s o h f ci e e sa d fa i i t f h e o p ig c n rlmeh d C mp r d w t — u d n e h a h w t e ef t n s n e sbl y o e d c u l o t t o . o a e i U e v i t n o h
f r g r t b l e l to m o y o sa i z d p a f r i Y N u , L i A GP I Q
( . col f u m t n N n n nvr t o rnui n so ats aj g 20 1 h a 1Sh o o t ai , aj gU i s y f oa tsadA t n u c,N ni , 10 6C i ; A o o i e i Ae c r i n n
a d i c e s d t e de o pl g pr cso fe t ey. Ex rme t n t e g r tbi z d t r tb e o V n n r a e h c u i e iin efc i l n v pe i n s o h y o sa l e u n a l fa T i
ty t o ,t e i p to t u e o ln o to ft e sa iie lto sfu e r he r y h n u — u p td c up i g c n rlo h tb lz d p afr wa o nd d.Th n,a mo e f l m e d —o - lwi g si i g mo e c n r lwa d e o i.Th l i g mo e c nto d p e h u da a e tu — o n l n d o to sa d d t t d e si n d o r la o t d t e bo n r ly r sr t d y tr u e,a d a n n i a tm su e n i h o n a a e .Att e s metme,t e wi t ft eb u d・ n o l ne rie wa s d i sdet e b u d r ly r y h a i h d h o h o n
陀螺稳定平台的滑膜变结构控制实验研究

1 稳定 平 台 系统 结 构
该 稳 定 平 台 主要 由双轴 速 率 积 分 陀螺 仪 、 位 方 向和 高低 向直 流力 矩 电机 、 位 向和 高低 向解算 器 、 方 12钢带 传 动机构 、 撑框 架 、 / 支 电磁 锁定 装 置 及 轻质
第3 2卷 第 8期
20 l1年 8月
兵
工
学
Байду номын сангаас报
Vo . No 8 132 . Aug . 2 011
ACTA ARMAM ENTARI I
陀螺 稳定平 台的滑膜变 结构控制实验研究
姚 兆 ,刘 杰 ,李 允公 ,衣 英 刚 ,高 飞
(. 1 东北 大学 机 械 工 程 与 自动 化 学 院 , 宁 沈 阳 l0 0 ;. 甲兵 技 术 学 院 , 林 长 春 10 1 ) 辽 10 42 装 吉 3 17
刘 杰 (9 4 ) 男 , 授 , 士 生 导 师 。 Ema :ii@ma . e .d .n 14 一 , 教 博 - ijl l eu i N u e u a l
兵 工 学 报
擦 力矩 进行 观测 和 补 偿 的方 法 , 其 他 方 法相 比具 同 有 较好 的 自适 应能 力 和 较 高 的精 度 ; 于 机 械谐 振 对 定 。 图 1为稳 定平 台原 理框 图 。
冲击 力强 等特 点 , 效 地 提 高 了 系统 的扰 动 隔 离 精 有 度 和鲁 棒 性 , 同时 , 统 结构 简 单 , 积 小 , 量 轻 , 系 体 质
具 备很 强 的实用 性 。
软 件 , 虑 各 种参 数 扰 动影 响 , 行 模 型分 析 与 数 考 进 字 动 态 仿 真 , 复 验 证 模 型 的 准 确 性 。 考 虑 到 稳 反 瞄控 制 系 统是 一 个 高 精 度 控 制 系统 , 螺 、 转 变 陀 旋 压 器 等 器 件 的 输 出 信 息 属 于 微 弱 信 号 , 易 受 到 极
航天技术导论第四章
第四章 控制系统4.1 概述控制系统是航天器、运载火箭和导弹等飞行器的重要组成部分,是飞行器运动的指挥中枢。
要求飞行器完成飞行任务,就必须对它的运动实施影响。
飞行器的运动包括其质心的运动和绕其质心的角运动两部分。
对这两种运动的影响包括稳定和控制两方面的要求,稳定是指保持原有的状态(位置和姿态),控制是指按预定的目标改变状态。
一般说来,飞行器控制系统的任务就是对飞行器质心运动的轨迹和绕质心角运动的姿态实施控制和稳定。
比如在运载火箭发射和飞行过程中,控制系统的主要任务是控制火箭按预定的轨迹飞行,使有效载荷精确入轨;同时对火箭进行姿态控制,保证在各种干扰条件下稳定飞行;还要控制飞行过程各分系统工作状态变化和信息传递;发射前要对火箭进行检查测试,实施发射控制(简称发控)。
而对于在空间飞行的航天器,控制系统的主要任务包含对航天器姿态的稳定和控制,以及对航天器轨道的控制;还包括温度控制和生命保障系统的控制等。
显然,对于不同种类的飞行器,控制系统的任务是不完全相同的。
它们的作用原理、构成也有相当大的差别。
本章将分别介绍运载火箭、航天器和导弹的控制系统4.2 运载火箭的控制系统前面已经提到,运载火箭控制系统的主要任务是控制火箭按预定的轨迹飞行,使有效载荷精确入轨。
当有效载荷是打击地面固定目标的战斗部时,运载火箭就成为弹道式导弹。
因此,弹道式导弹的控制系统与运载火箭的控制系统有许多相同之处。
为避免重复,本节在介绍运载火箭控制系统的同时,也穿插介绍弹道式导弹的控制系统。
4.2.1 运载火箭控制系统的组成和功能运载火箭的控制系统由制导系统、姿态控制系统、配电系统和测试发控系统等分系统组成。
制导系统的功能是控制火箭的质心沿预定的弹道飞行,并保证卫星、飞船等有效载荷准确入轨。
对弹道式导弹来说,就是控制弹头落点的精度。
姿态控制系统则是控制火箭绕质心的运动,并保证飞行姿态的稳定。
配电系统除完成控制仪器设备的供电外,还根据飞行程序发出时序指令控制各分系统工作状态变化的协调。
静电陀螺仪四环空间稳定平台的运动学分析

动力学方程 的基 础上 完成 平 台框 架轴角 运动 曲线 的绘制 , 是认 清平 台系统 的工作 机理 、 立平 台 系统控 制模 型 、 建 实
现平 台稳 定 控 制 的基 础 .
图 1 坐标 系示 意 图
各坐标 系的运动角速度存在如下关系 : o t t ∞ O
眦
1 坐 标 系定 义 及 运 动 学 关 系
转角为 s 中框相对外环 的夹角 为 r( , 等于 △ +A , 中 △ r 其 r 为系统运行之后 中框相对外框 的转角 , 。 载体初始 时刻 A为 所在位置 的纬度角 ) 内框 相对 中框 的转角 为 q 台体 相对 , ,
内框 的转 角为 P 初始 时刻 , 体位于 赤道且 纵轴指北 , . 载 载 体坐标轴 对应 载体 的纵 轴 , 沿载 体横 轴 并指 向右 Y轴
后控制 , 以保持 内框轴 传感 器始 终处 于零 位. 这样 布置 的 平台仅在地球南 北两极 附近失去稳 定性 .
四 环 空 间稳 定 平 台通 过 4个 框 架 对 载 体 的 运 动 干 扰 进 行 隔 离 , 擦 力 矩 、 不 平 衡 力 矩 及 惯 性 干 扰 力 矩 均 需 摩 静 通 过 伺 服 电动 机 提 供 的控 制 力 矩 来 补 偿 . 系 统 运 动 学 及 在
载体速度 、 位置 及姿 态信 息. 四环 空 间稳定 平 台各 轴 在载
体上的布置方式 为 : 台体 轴平行 地 轴 , 内框轴 与赤 道平 面
平行并落在子午 面 内, 中框 轴水 平 向东 , 外框 轴为 载体 方
位轴. 四环空 间稳定平 台里 的 3根轴 由台体 上的 2只 自由
侧 , 轴垂直 向下 , 如图 1 所示. 这样 , 载体运动角速度t O =
惯性导航系统原理_陀螺稳定平台工作原理

第四章 陀螺稳定平台工作原理
o o o o o o
4.1 各类稳定平台简介 4.1.1 直接式陀螺稳定平台 4.1.2 间接式陀螺稳定平台 4.1.3 动力式陀螺稳定平台 4.1.4指示式陀螺稳定平台 4.1.5 用速率陀螺仪构成的稳定平台
2010-05
4
4.1 各类稳定平台简介
陀螺稳定平台的稳定作用之一是平台能自动产生卸荷力矩对消干扰力矩. 卸荷力矩由两类不同的力矩组成:
&×H M dy = β
Mg
Mdy
& β
& Mg = H ×β
ห้องสมุดไป่ตู้
2010-05
7
以框架组件为分析对象,框架组件的总动量矩为
b b HG = H b + [ I ](ωib + ω b bG )
zb β
z
0 I x +0 = H sin β H cos β 0
2010-05 6
该陀螺稳定系统,倾倒力矩的对消过程为:
在倾倒力矩Mdy (假设沿列车向前,即图中穿入纸面方向)作用下,
& 向左,即x 负方向, 陀螺发生进动,引起的进度角速度 β b
Up zb
& β
Mdy
yb
Forward
此进动角速度引起陀螺力矩 & M = H ×β
g
Mg方向沿列车后向,即图中穿出纸 面方向,因此陀螺力矩对倾倒力矩直 xb Right 接起到了对消作用.
&) M b ω y I x (ωx − β x −ωx H sin β + I yω y = M dy H cos β + I zωz M zb 0
《现代导航技术与方法》4.1 惯性导航系统(INS)

4.3.2.2 加速度计的分类
加速度计测量加速度的原理和方法很多,如机械、 电磁、光学、放射线等。因此,从不同的角度可以把 加速度计分为不同类型。
按检测质量块的位移方式分为:线性加速度计(检 测质量作线位移)和摆式加速度计(检测质量绕支承轴 转动)。
按支承方式分为:宝石支承、挠性支承、气浮、 液浮、磁悬浮和静电悬浮等。
1. 概论(2)
惯性导航的意义 惯性导航可以在一个完全与外界条件以及 电磁环境隔绝的假想“封闭”空间内实现 精确导航。 这在军事上很有价值,因为惯性导航可以 不受气候和电子干扰。 重要军事应用:导弹、军用飞机的制导或 导航。
1. 概述(3)
惯性导航系统可提供多达35个导航参数, 主要包括:即时经度和纬度,飞机地速、 航迹角,飞机的姿态角、航向角及角速度, 沿给定坐标轴的三个线加速度,垂直(升 降)速度,惯性高度等。
方向余弦矩阵为一个正交矩阵,正交性也是方向余弦 矩阵的重要性质之一。利用方向余弦矩阵,可以方便地实 现多个相同原点的坐标系之间的矩阵变换。
惯导系统中,惯性元件输出的载体运动参数是基于惯 性坐标系测量的,根据导航任务的不同,必须将其转换为 基于非惯性坐标系(如地理坐标系)的参数。要进行这种转 换,就需要用到方向余弦矩阵。方向余弦矩阵有时也被称 为旋转矩阵,在某些应用场合称为姿态矩阵。
(当地)地理坐标系随飞机一起运动,但无 论飞机如何运动,地理坐标系坐标轴指向 不变。
当地地理坐标系(地平坐标系)
4.2.1.5 陀螺稳定平台坐标系
陀螺稳定平台坐标系 op xp yp z p:原点取在平 台上,xpop yp 平面在平台内,z p轴垂直于平台, 指向上方。坐标系与台体固连。
4.2.2 方向余弦矩阵
1. 概述(1)
机载光电陀螺稳定平台的伪微分反馈控制
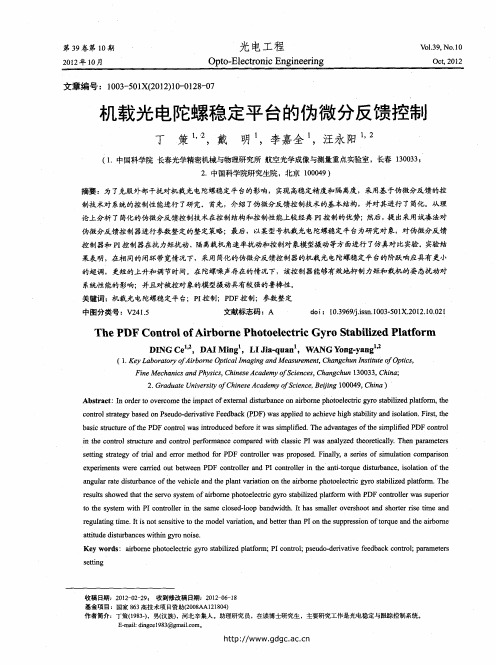
机载光 电陀螺稳定平 台的伪微分反馈控制
丁 策 。 ,,戴 明 ,李嘉全 ,汪永 阳 , 2
(. 1 中国科学院 长春光学精 密机械与物理研究所 航空光学成像与测量重点实验室 , 长春 103 , 303
2 .中国科学院研 究生院 ,北京 1 04 0 0 9) 摘要 :为 了克服 外部 干扰对机 载光 电陀螺稳定平 台的影响 ,实现 高稳定精度和 隔离度 ,采用基 于伪微 分反馈 的控 制技术对 系统的控制性能进行 了研 究。首先 ,介绍 了伪微分反馈控 制技 术的基本结构 ,并对其进行 了简化。从理 论上分析 了简化 的伪微分反馈控 制技 术在控 制结构和控制性能上较 经典 P 控制 的优势;然后 , 出采用试凑法对 I 提
ThePD F nt o f r r Co r lo bo nePho o lc rcGyr t biie a f r Ai t ee t i o S a lz d Pl to m
陀螺稳定平台控制算法比较研究
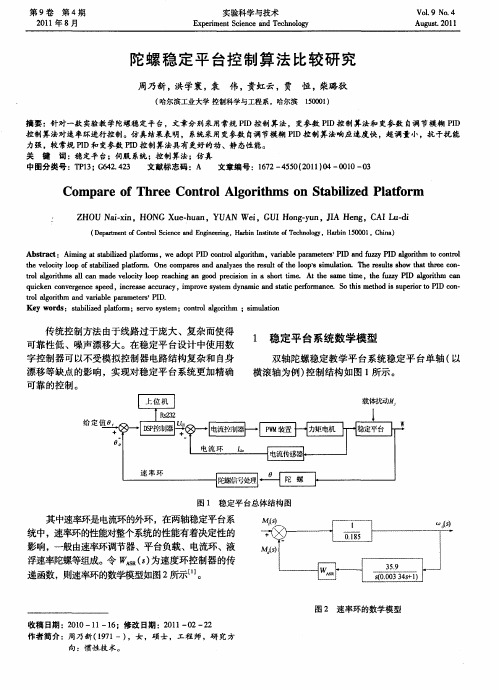
可簋控 妻线篓 台设计 董篓 1稳 平 一 。 学 型 靠釜 查墨 ‘ 。定‘台 统 模 性 噪声漂移大。在稳定平 中使用数 心~ H 系 数 一 低 一
告
、
字控制器可以不受模拟控制器ቤተ መጻሕፍቲ ባይዱ路结构复杂和自身 漂移等缺点的影响,实现对稳定平 台系统更加精确 可靠的控制。
第 9卷 第 4期 21 0 1年 8月
实验科学与技术
E p r n ce c n e h oo y x e me tS in e a d T c n lg i
V0. . 19 No 4
Au u t2 1 g s 0 . 1
陀 螺 稳 定 平 台控 制 算 法 比较 研 究
Ab t a t Ai n tsa i z d paf r ,w d p I o t l lo i m ,v ra l a a tr ’ I n z y P D ag r h t o to s r c : mi g a tb l e lt ms e a o t D c n r g r h i o P oa t ai b ep rmee s P D a d f z I lo t m c n rl u i o t e v lct o p o a i z d p a o m. On o ae n ay st e r s l o e lo ’ smua in h e ut h w t a re c n h eo i lo f t l e lt r y sb i f e c mp r s a d a l z h e u t ft o pS i lt .T e rs l s o tt e o ・ n e h o s h h t lag r h l C d eo i o e c i g a o d p c s n i h r t . A h 8 l i ,t e f zy P D ag r h a r lo t ms al a ma e v lct l p r a h n n g o r ii n a s ot i o i n yo e o me tt e 8 ne t me h u z I l o t im C n q ik n c n e g n e s e d, n r a e a c r c ,i r v y tm y a c a d sai ef r a c .S hsme h d i u e o I c n u c e o v r e c p e i c s c u a y mp o es s e e d n mi tt p r m n e ot i n c o t o ss p r r oP D o — i t t lag r h n a a l a a tr ’ I o r lo t i m a d v r b e p r mee P D. i s Ke r s t i z d p a o ;s ro s se y wo d :sa l lt r b i e fm e v y t m;c n r lag r h o t lo t o im ;smu ain i lt o
惯性导航系统原理_陀螺稳定平台工作原理(1)
& cos β + I ω & Hβ y y = M dy
& cos β Hβ
是由陀螺角动量H & 和进动角速度 β
2010-05
用动量矩定理分析
9
直接式陀螺稳定平台的特点
& ≠ 0 时陀螺力矩才存在,如果倾倒力矩长时间存在,则β (1)只有当 β & cos β = 0 Hβ 将越来越大,当β =90°时,
第四章 陀螺稳定平台工作原理
o o o o o o
4.1 各类稳定平台简介 4.1.1 直接式陀螺稳定平台 4.1.2 间接式陀螺稳定平台 4.1.3 动力式陀螺稳定平台 4.1.4指示式陀螺稳定平台 4.1.5 用速率陀螺仪构成的稳定平台
2010-05
4
4.1 各类稳定平台简介
陀螺稳定平台的稳定作用之一是平台能自动产生卸荷力矩对消干扰力矩. 卸荷力矩由两类不同的力矩组成:
2010-05 15
间接式陀螺稳定平台的特点
间接式陀螺稳定平台在工程中的应用是很广泛的,其最大优点是 不同的被稳定对象可共用一个信息参考基准,这对降低成本,减少 重量和体积是十分有利的.但这类稳定平台达到的精度一般都不 高,图示双轴水平稳定平台,其精度很难达到0.2°.
2010-05 16
动力式陀螺稳定平台
ωx
Hsinβ
xb ( x )
&&) 0 I x (ω &x − β & & H β cos β + I ω y y + ωz & sin β + I ω − H β & z z −ω y
2010-05
−ωz 0 ωx
探测制导与控制技术教学大纲 惯性导航

《惯性导航》课程教学大纲课程代码:110242202课程英文名称:Inertialnavigation课程总学时:32讲课:32实验:0上机:0适用专业:探测制导与控制技术专业大纲编写(修订)时间:2017.7一、大纲使用说明(一)课程的地位及教学目标惯性导航是探测制导与控制技术专业课,它是在前期相关专业基础课后,直接为飞行器导航定位技术服务,解决导航、制导和飞行器控制工程实际问题。
本课程讲授内容涵盖惯性导航原理,陀螺技术,加速度计技术,平台式惯性导航技术惯性导航系统的对准。
通过该课程学习,学生可掌握惯性导航定位基本原理和各种导航系统的实际应用。
(二)知识、能力及技能方面的基本要求惯性导航是探测制导与控制技术专业的一门主要的专业课程。
学完这门课程,应使学生了解惯性导航课程内容及其学习方法;掌握导航技术基础知识,包括地球坐标系及各种导航系统的基本导航思想;掌握导航定位最基本的推算航位计算公式,掌握惯性导航的基本原理,陀螺技术,加速度计技术,平台式惯性导航技术,惯性导航系统的对准,具有针对惯性导航方面的实际问题运用所学的理论知识进行分析和实际解决问题的能力。
(三)实施说明本课程着重于在工程应用中能熟练运用惯性技术解决实际问题能力培养,教师应在理论知识讲解的基础上,有针对性地选一些典型的案例进行分析,使学生能够将理论知识运用到实际中去,真正学以至用。
(四)对先修课的要求高等数学,陀螺力学,电路,模拟电子技术,控制电机,伺服系统,自控原理。
(五)对习题课、实验环节的要求对涉及到的每一章节的内容应选典型题进行课上讲解及留做课后作业,在习题的训练过程中加深对知识的理解和把握。
(六)课程考核方式1.考核方式:考查。
2.考核目标:在考核学生对惯性导航的基本知识、基本原理和方法掌握的基础上,重点考核学生的选择、使用惯性导航系统能力和利用惯性元件设计简单的导航系统的能力。
3.成绩构成:本课程的总成绩主要由三部分组成:平时成绩(包括作业情况、出勤情况等),期末考试成绩组成。
直流力矩电机控制的动力陀螺稳定平台

中图分 类号 :P 7 . T 9 2 1 )4— 10— 4 10 8 2 ( 0 2 0 0 4 0
Co t ol d wih D C o o fDy a ia r t b e Pl to m nr l t e M t r o n m c lGy o S a l a f r
o o q e moo , h r b s o to lri e in d. i u ain a d e p rme t t n i d c t ha h y t m s ftr u tr t eH o u tc n r l sd sg e Sm lto n x e e i n a i n i ae t tt e s se i o
P ENG h —o g C Z iy n , AO e, ANG e g h i JANG n — o g F iW P n —u,I Do g h n
( hn i on si cd m , uyn 7 0 9 C ia C iaAr reMi l A ae yL oa g 10 , hn) b se 4
Ab t a t Dy mi a y o tb e p af r i e n a i—o—r un a e e k r I r rt e u e t e i — s r c : na c lg r ’Ssa l l t m sus d i n art g o d l s rs e e . n o de o r d c h n o f ci n o c in a d y wp o h y mi a y o Ssa l lto m, o q e mo o t i e rt nao rv e to ff t n a ft e d na c lg r ’ tb e p afr DC t r u trwih ln a iy a lg d i— i r o i y t m s d sg e Co sd rn h c n r d f co s o l cr ma n tc paa tr fi t n, e d dsu b ng s se i e in d. n i e g t e un o f me a t r fe e to g ei r me e , rci l a — it r i i o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
iibbbbyx
ibbz
a ia
Cbaibb
a ba
cosa sina
0
s in a c os a
0
0 0
iibbbbyx
0 0
iibbbbxy
c os a c os a
b iby
b ibx
s in a s in a
1 ibbz a
b ibz
a
其中 a
是陀螺感测到
ωB反映了系统对输入响应的快慢 1、干扰信号一般为小于5Hz的低频信号, ωB应远大于5Hz, 才能抑制干扰 2、噪声也会形成干扰,频率一般在50-5000Hz, ωB不能 太宽,以免引入噪声干扰 3、修正指令信号的频率
平台对基座角振荡的隔离度
当基座作角振荡时,干扰力矩会引起平台同频率的角振
荡,定义平台角振荡的幅值与基座角振荡的幅值之比为稳定
第四章 陀螺稳定平台
陀螺稳定平台包括 1、惯性平台 2、陀螺稳定装置
陀螺稳定平台的基本功能: 1、稳定功能
抑制外界扰动 2、跟踪功能
按指定的姿态运动
陀螺稳定平台的稳定作用之一是能自动产生卸荷力矩 对消干扰力矩。卸荷力矩分为两类 1、陀螺力矩 2、伺服力矩
陀螺稳定平台的主要类型 1、直接式陀螺稳定平台--干扰力矩由陀螺力矩对消 2、间接式陀螺稳定平台--干扰力矩由伺服力矩对消 3、指示式陀螺稳定平台--干扰力矩由伺服力矩对消 4、动力式陀螺稳定平台--干扰力矩由伺服力矩和陀螺 力矩对消 5、指示-动力式陀螺稳定平台--干扰力矩由伺服力矩和 陀螺力矩对消
0
f ifz
0
f ify
f ify
f ifz
tan f
a iay
cos f
tan f
sin f
a iay
sec
f
cos2 f
sin 2 f
b iby
c os a
b ibx
s in a
sec f
结论:双轴稳定平台不能完全隔离基座的角运动,它会绕滚 动轴做旋转运动。 旋转角速度与俯仰角相关,俯仰角越大,旋转越快
0
ibbx
s in r
b ibz
c os r
俯仰环的角速度
1 Crf 0
0
0
cos f sin f
0
s in
f
cos f
f if
Crf
r ir
f rf
iiffffyx
1 0
iffz 0
0
c os r sinr
横滚环的角速度
0
s in r
iirrrryx
0f
irry
s in
f
其中 f
是陀螺感测到
a iax
后俯仰环伺服回路控制俯仰环旋转
的角速度,f
的作用是对消
a iax
即
f ifx
a iax
f
0
f ify
a iay
cos f
f ifz
iaaz
sin f
若 f
0
则
f ifz
0
陀螺感测该角速度,控制方位环旋转
伺服产生的角速度为 za1 iffz sec f
所以俯仰环的角速度
0 0
iiffffyx
0 0
iiffffxy
c os a c os a
f ify
f ifx
s in a s in a
1iffz a
f ifz
a
采用三个环架轴的角速度来表示,并简化可得
iiaaaayx
cosa sina
iaaz 0
cos f sina cos f cosa
r irx
cos f
f
r irz
s in
f
cosr irrz
0
irrz
cos f
r iry
sin f
cosa sina 0
C
a f
sina
c os a
0
0
0 1
a ia
C
a f
f if
a fa
iiaaaayx
cosa sina
iaaz 0
s in a c os a
0
角度耦合分析 横滚环的角速度
cosr 0 sinr
Cbr
0
1
0
sinr 0 cosr
r ir
Cbribb
r br
iirrrryx
c os r
0
0 1
s in r
0
iibbbbyx
0
r
ibbx
c os r
b ibz
b iby
r
s in r
irrz sinr
0
cosr ibbz
u u
A gx
A gy
,iiaaaayx
T1 iirrffxy
iaaz 0
0
Wa
u
A gz
iaaz
iaaz
若 KGx KGy KGz KG
Wr Wf Wa W
Wr KG 1
则
iiaaaayx
T1WIT2KG I
cmdx
cmdy
T1T2
cmdx
c
mdy
0 0 0 1
f if
iffy
Caf
0
iffy
0
iffz
za1 iffz 0
Hale Waihona Puke 0cos f sin f
0 0
s in
f
0
cos f za1
0
0
iffy
f ifz
sec
f
s in
f
iffy
f ifz
tan f
iffz
f ifz
sec f
cos f
0
即
f ifx
单轴陀螺稳定系统的方框图
ke
ε υcmd +
C(s) +
-
-
km
+ Md
K +
R(τes+1) +
1 Js
υ
其中 cmd 为指令修正角速度,C(s) 为稳定控制器, K 为功放系数, e 为电机的电气时间常数,ke 为电机反电 动势系数,J为稳定平台的转动惯量,ω为在惯性坐标下平 台绕稳定轴旋转的角速度
单轴陀螺稳定平台
单轴陀螺稳定系统由平台、平台轴、力矩电机、信 号放大器、速率陀螺组成。力矩电机的定子固定在基座 上,它的转子轴与平台稳定轴固联,平台的稳定轴通过 轴承支撑于基座上。速率陀螺的输入轴与平台的稳定轴 重合,其输出接至控制器,由控制器的输出驱动力矩电 机控制平台转动。
当载体在平台的稳定轴方向有旋转角速度时,会使 平台绕稳定轴相对惯性空间转动ω,速率陀螺输出不为 零,将指令角速度(通常为零)和速率陀螺输出之差进 行处理并放大,输出控制信号驱动力矩电机,使力矩电 机反向抑制ω的变化,从而隔离外加的扰动信号,使平 台姿态保持惯性稳定。
旋转角速度还与基座在俯仰和横滚方向上的角速度以及方位 角相关。 俯仰角太大还会造成系统的自由度丢失等问题。
三轴陀螺稳定平台
r为横滚环,f为俯仰环,a为方位环,Mr、Mf、Ma分别为安装 在相应环架上的电机,Gx、Gy、Gz为敏感轴相互正交的3个 陀螺。
定义
1、基座坐标系b与基座相连 2、横滚环坐标系r与横滚环相连,yr轴沿横滚环轴,与yb轴指
工作时陀螺敏感基座相对惯性空间的旋转角速率
b ib
,
角度敏感装置测量和计算各个环架的角度和角速率变化,通
直接式陀螺稳定平台 以单轨列车为例
z
H
.
β
x
M
系统实质上是单自由度陀螺 当车厢存在倾倒力矩M时,引起内框架进动角速度为 进动角速度引起陀螺力矩
Mg H
陀螺力矩与倾倒力矩方向相反,对倾倒力矩直接起到 了对消作用。
直接式陀螺稳定平台存在的问题 1、只有当 0 时陀螺力矩才存在,如果倾倒力矩长 时间存在,则β将越来越大。当 90时, Hcos 0 陀螺力矩失去卸荷作用,系统实质上是正反馈不稳定 系统,要成为稳定系统,必须采取措施使 0 ,即 对消倾倒力矩的同时使倾倒角归零。 2、只有当角动量H非常大时才能产生足够大的陀螺力 矩,所以设施非常笨重。
a ia
0
即
T1iAA T3ibb 0
则
A iA
T11T3ibb
环架信号的分配
ωcmdx
KGx
ωcmdy
KGy
ωcmdz
KGz
ugax
ugAx
信号分 ugay 配矩阵 ugAy
T2
ugaz
ugAz
ωif fx
Wf
ωa iax
环架几
ωr iry
何关系 ωiaay
Wr
矩阵
ωaiaz
Wa
T1
ωa iaz
简化后的方框图
υcmd
+ Md
Y(s)
1
υ
+ -
+
Js
可得
Y (s)
1
(s)
1
Js Y (s)
cmd (s)
Js 1 Y(s)
Md
(s)
Js
Js
令 G(s) 1
Js
则
(s)
1
Y
(s)G(s) Y (s)G(s)
c
md
(s)
1
G(s) Y (s)G(
s)
M
d
(s)
传递函数
(s) Y (s)G(s)