XX钢铁铁路道口无人值守系统技术方案
无人值守系统方案
本页面为作品封面,下载文档后可自由编辑删除!精品文档目录1.项目简介 (3)1.1前言 (3)1.2术语缩略 (4)1.3项目背景 (5)1.4建设范围 (6)1.5建设目标 (6)2.技术方案 (7)2.1设计原则 (7)2.2系统总体设计 (9)2.2.1网络架构 (10)2.2.2功能架构 (10)2.3需求理解 (11)2.4系统功能简述 (12)2.4.1无人值守一卡通计量业务流程简介 (12)2.4.2港口管理系统简介 (13)2.4.3云平台简介 (14)2.4.4异常问题处理流程简介 (14)3.实施方案 (15)3.1项目规划 (15)3.2项目管理 (15)3.2.1组织架构 (15)3.2.2进度管理 (17)3.2.3质量管理 (17)3.2.4风险管理 (17)3.2.5各项内容关系 (18)3.3项目沟通 (18)4.实施效益 (19)4.1社会效益 (19)4.2经济效益 (19)5.培训计划 (19)5.1培训目的 (19)5.2培训方式 (20)6.售后服务............................................................................................错误!未定义书签。
6.1服务范围.............................................................................................错误!未定义书签。
6.2服务标准.............................................................................................错误!未定义书签。
6.3服务期限.............................................................................................错误!未定义书签。
大铁无人值守铁路道口自动控制系统的设计方案

定,然后再向其他系统发出命令信息,从而进行指挥。
系统硬件设计的选择可根据设计单位的经济能力、工况条件、要求程度等具体情况选择,比如可以选用单片机,其硬件组合关系有所体现。
由CPU、ROM、锁存器等构成最小的微机系统,传感系统的信号由I/O口输入,由此启动控制信号由功放上的输出,系统程序固化在ROM中。
当判断传感系统的信号为有车即将通过时,CPU即向声光报警系统发出启动信号,并经过适当延时,让已经在铁道上的车辆和行人有时间离开,然后发出启动路障的信号,直到当传感器判断系统信号为车已经通过”时,向报警系统和路障系统发出终止信号。
传感系统传感系统是全部系统的神经末梢,本文根据自身思路特别设计了一种有效的传感器,来保证传感系统的可靠性和先进性。
传感器的设计示意图如图3所示。
图3 传感器图4 传感系统电路结构图 声光报警系统声光报警系统采用交通信号与文字相结合,并伴有音响揭示效果的综合报警系统,以最有效地刺激人的感官,具体TKB-III-ZD(三灯自动道口报警器)、TKB-III--SD (三灯遥控道口报警器)和TKB-III--WX(三灯无线道口报 路障系统在设置路障方面,需要使用一种快速运行的路障并能保证安全有效地制止车辆抢道,对正在行驶的车辆能迫使其停车。
所以可以使用传统自上而下的栏杆路障。
电源系统采用交流电(市电)→直流电→蓄电池→直流电的供电方式,保证电力系统不受外界干扰。
故障紧急报警系统故障紧急报警系统可以实现在系统发生故障时,仍然保证道口的安全操作。
故障报警系统就是要绕过控制系统、声光报警系统及路障系统本身,从第三者的角度对其进行监视。
因此它是直接从传感器中采集信号(此处的传感器并非原传图2 系统工作平面示意图(下转第图1 VR空间生成示意图 软件发布与推广第一,在手机应用商店发布基于文化传播领域的APP。
通过在用户手机中安装此APP手机眼镜设备,使用户在任意地点全方位观看体验虚拟世界。
铁路道口远程控制系统解决方案样本
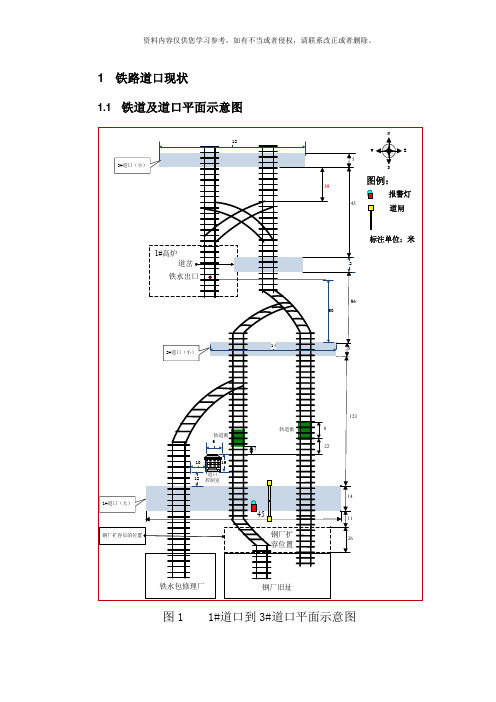
1 铁路道口现状1.1 铁道及道口平面示意图图1 1#道口到3#道口平面示意图图2 3#道口以北平面示意图1.2 各个道口基本情况1.2.1 1#道口1#道口指1#高炉与炼钢厂之间的大道口。
机动车和人均允许经过。
当夏天雨季来临时, 1#道口附近的铁轨会严重积水, 铁轨表面就会布满水, 清理水需要5~6小时。
1#道口附近的值班室, 共三个房间: 道口值班室、轨道衡值班室、火车调度值班室。
当前, 1#道口因施工停止经过。
2月份后, 炼钢厂需要向北扩, 与轧钢厂的位置平齐, 靠1#道口比较近( 具体距离见后面的道口平面图) ; 炼钢厂北移后, 炼钢厂北面原中间位置的轨道向东移, 因此, 该轨道从炼钢厂出来后将变直。
炼钢厂北扩后, 天车吊铁水罐的位置也会向北移20多米。
粗略估计, 当火车头卸下铁水罐, 离开一段距离停止时, 火车头离道口只有5~6米。
在炼钢厂内, 2条铁道是分开的, 而且西边轨道比东边的长10多米。
1.2.2 2#道口2#道口( 小) : 指1#高炉与炼钢厂之间的小道口, 主要经过铲车, 上露天料; 一般不允许其它机动车通行; 允许人走。
1.2.3 3#道口3#道口( 小) : 指1#高炉与2#高炉之间的小道口, 主要是人行道口, 不走机动车。
1.2.4 4#道口4#道口: 指2#高炉与3#高炉之间的大道口, 机动车和人均允许经过。
当前声光报警器和道闸均配备, 最为繁忙。
1.2.5 5#道口5#道口: 指3#高炉与4#高炉之间的道口。
只经过铲车上露天料, 一般不允许经过其它机动车; 允许人通行。
1.3 道口设备参数和运行情况1.3.1 主要道口设备参数●道口设备道闸控制: 电源220VAC, 道口电控箱控制, 抬/落杆时间均为5秒。
(经过改造后, 可使用开关量控制。
)●报警器规格: 电源36VAC, 采用100W灯泡。
●道口的电源都是来自于附近的高炉, 均为220VAC。
1.3.2 主要道口设备( 1#、 4#) 运行情况道口报警与道闸动作的时间关系为:●火车头( 或尾) 接近道口50米左右时, 火车司机经过对讲机, 通知道口值班员, 道口值班员走到道口, 经过遥控器进行声光报警; 然后等待15~20秒后, 经过外置的道口电控箱开始落下道杆;火车尾( 或头) 一过道口离开段, 马上抬杆放行。
城市无人值守铁路道口自动控制系统
长春un University of Science and Technology (Natural Science Edition)
Vol.34 No.4 Dec.2011
城市无人值守铁路道口自动控制系统
Abstract: Along with the development of the city rail traffic,more and more crossed intersections are combined with road. At present, technicians are arranged to watch these hoist intersections which is not only wasting manpower and resource, but also causing economic loss and bad social impact when the car clash accidents occured. To solve the problem mentioned above,automatic control system without watch for the railway crossing is studied in this paper. the control system with auto alarm device can let down the handrail when the train is coming,uplift the handrail and cancel alarm when the train is leaving,in the mean time,the control system can modulate the traffic light from east to west and from south and north automatically when the train is coming and leaving, which eventually realized the full automaticity without watch for the city railway crossing. Key words: unmanned railway crossing; PLC control; system design
企业无人值守铁路道口远程集控系统方
企业无人值守铁路道口远程集控系统方案
北京锐奇视讯科技有限公司
关键字:无人值守、铁路道口、远程自动控制、集控系统
系统简介
“企业无人值守铁路道口远程集控系统”是我公司采用最新技术研发的企业铁路道口远程控制技术。
近年来铁路道口的“瓶颈”问题日益突出,险象环生,交通纠纷经常发生,对企业的生产发展造成较大影响,“小道口”严重威胁着企业铁路系统的安全生产,人命关天,鉴于此我公司创新理念将视频监控、自动控制和计算机网络三种技术的有机结合,实现了铁路道口安全控制的跨越式进步。
我们拥有雄厚的技术力量、高素质的专业队伍,随时为有需求的客户提供一流的设计方案和技术支持。
系统目标
加强企业铁路道口行车和行车安全;降低道口人员的使用成本,提高生产率;实现远程集控监管;利用自动化设备,实时掌握道口情况;随时录制道口情况视频录像,便于历史查证。
系统特性:
安全性高;控制方式多样;技术先进;可扩展性高。
系统主要功能
本系统由视频监控系统、远程控制系统和公共广播三个子系统组成,通过光网络进行传输。
室外控制箱执行室内控制指令,开放、关闭道口音响、报警指示灯,开放、栏木机栏杆升起、落下。
并将现场的电源、栏木机升起、落下状态返回室内。
原箱体内设有手动转换开关,便于现场情况变化,现场人员操作设备。
主控室可通过该套系统对道口的安全设施进行远程控制。
在火车到来前的某一时刻,开启相应道口音操作界面,点击报警指示灯,告诉行人及车辆注意安全,将车辆停在安全位置。
道口栏木栏杆落下,放置水平位置,阻断道路。
机车通过道口,道口栏木机栏杆升起,放置垂直位置,开放公路,关闭相应道口操作界面。
无人值守解决方案

本方案为某企业提供了一个合法合规的无人值守解决方案,旨在提高生产效率、降低运营成本、保障生产安全。通过实施本方案,企业将实现智能化、自动化生产,提升市场竞争力。同时,本方案遵循我国相关法律法规,确保系统设计和实施符合国家标准,为企业的长期稳定发展奠定基础。
第2篇
无人值守解决方案
一、项目概述
随着自动化技术的飞速发展,无人值守系统在提升生产效率、降低人力成本及保障作业安全方面展现出显著优势。本方案旨在为需求方提供一套全面、合规的无人值守解决方案,助力企业实现智能化转型,同时确保各项作业符合法律法规要求。
(2)预警报警:当监测到设备异常或环境参数超出设定范围时,系统自动触发报警,并通过短信、电话等方式通知相关人员。
(3)远程控制:用户可通过用户界面模块对现场设备进行远程控制,实现无人值守。
(4)数据分析:对历史数据进行分析,为设备维护、生产优化等提供依据。
(5)权限管理:设置不同级别的用户权限,确保系统安全运行。
(2)建立完善的售后服务体系,提供及时、专业的技术支持。
(3)定期进行用户回访,了解系统运行状况,解决用户实际问题。
四、项目实施与验收
1.项目实施:根据企业实际需求,制定详细的实施计划,包括设备安装、系统调试、人员培训等环节。
2.项目验收:项目实施完成后,组织专家进行验收,确保系统达到预期效果。
3.项目运维:建立健全的运维管理制度,保障系统长期稳定运行。
(2)数据处理与分析模块:对采集到的数据进行分析处理,实现对现场设备的实时监控和预警。
(3)控制执行模块:根据分析结果,对现场设备进行远程控制,实现无人值守。
(4)用户界面模块:为用户提供可视化操作界面,方便用户实时了解现场运行情况,并进行远程操作。
工矿企业铁路无人值守道口自动安全报警系统的设计

工矿企业铁路无人值守道口自动安全报警系统的设计摘要:工矿企业铁路道口有着过往车流量大、人员较多等特点,有必要借助报警系统对一定距离内行进的机车车列实施有效探测和报警,提醒过往车辆和行人,确保机车车列安全通过铁路平交道口。
因此,有必要充分利用先进技术,并借鉴实践经验,对铁路无人值守道口自动安全报警系统进行科学设计。
关键词:铁路无人值守道口;自动安全报警系统;设计前言铁路道口安全一直是铁路交通安全的重点,目前工矿企业对于公路与铁路的交叉道口常采用人工值守的方法来管理道口,如常见的电机驱动轨道栅栏阻挡车辆和行人。
但是随着国企三年改革行动方案的逐步实施,企业用工人员的紧缺,取缔有人值守道口势在必行,为了提高铁路道口的安全状态,为列车通行提供保障,有必要设计一种不需要大规模施工并且能提升安全性的无人值守的铁路道口自动控制系统。
在列车即将通过铁路道口时,自动使用声音和灯光报警引起行人和车辆的注意,并对道口进行拦截,以保证列车顺利通过,使行人和车辆的安全得到保障,杜绝出现道口交通事故,实现本质化安全。
1系统组成以及工作原理该设备由于使用频繁,工作化境较差,系统设备直接暴露在铁路线路上,夏季阳光直射、雨水浸泡,冬季气温较低、冰雪覆盖,还有不可避免的沙土垃圾掩埋、人为破坏等。
因此该设备容易出现故障,而且该设备电路多为集成芯片,一旦出现损坏给设备的维护及维修带来很大的不便,不利于“节能降耗”,故此通过分析该系统的运行机理,开发出适合工矿企业实际情况的硬件设备,开发编写该器件的程序,来实现系统的功能,给维护保养带来便利。
2铁路道口报警系统所采用的技术路线根据上述设计要求,结合实际情况,对铁路道口报警系统采取如下所述的研究方法和技术路线:本系统是以智能仪器为核心的系统。
首先对该系统进行分析,了解该电路主要实现的功能。
其次画出对应的电路图,根据实现的功能写出处理器每个引脚实现的作用。
最后根据对应的逻辑关系和输入输出引脚,编制相应软件程序进行调试,最终实现设备在实际生产中的应用。
无人值守系统设计方案-2013.1.9
无人值守系统设计方案目录1.系统概述 (2)2.系统工作流程 (3)1. 流程表格 (3)2. 无人值守称重系统流程图 (3)3.系统结构组成 (4)1. RD800读卡器 (4)2. 车辆定位识别装置 (5)3. 视屏拍照系统 (5)4. 车辆引导系统 (6)5. 称重管理软件 (6)6. 专用控制柜 (7)4.系统的异常处理机制 (8)5.防作弊功能 (9)6.组件配件表 (10)7.系统附属文档和概要 (11)1.系统概述本方案的设计目的在于建立一套高稳定性易于实施和维护的无人监控称重管理系统,该系统可以广泛应用于钢铁、煤矿、化工、电厂、码头等等行业。
本系统通过IC读卡器或者RFID远距离读卡器识别车辆信息,通过红外线光幕控制车辆停靠位置,通过红绿指示灯、语音播报、点阵大屏幕、道闸栏杆等设备引导车辆进出,支持车辆单向或者双向上磅称重,计算机自动保存车辆称重信息,并可以通过视频卡显示磅上图像并截取称重图片,同时可以提供局域网内的称重数据共享。
该系统可以加强企业管理上的一致性,缩短了物资流转时间,提高工作效率,降低运作成本,杜绝人工称重可能引起的操作失误和作弊现象,并可以促进企业信息化管理建设。
2.系统工作流程1. 流程表格2. 无人值守称重系统流程图3.系统结构组成系统在磅房可以部署有车辆识别器(即近距离IC读卡器或者RFID读卡器),车辆定位识别装置(即红外线光幕),车辆引导系统(包括道闸、指示灯等等),视频拍照系统,以及称重管理软件等等,系统的核心包括一个主控制器和一台计算机,通过各部件的信息交互来完成对整个管理系统的控制。
1. RD800读卡器RD800读卡器可以读取车辆磁卡信息,用于识别车辆记录车号之用。
RD800M非接触式IC卡读写器读写射频卡,由主机、天线、串行接口等组成,可带LED显示,通过RS232串行接口或RS485接口能实现同PC机及相关设备的连接,随机支持SAM卡操作,可实现安全发卡及满足大多数安全领域的需要。
《无人值守道口方案1(星光级)》

《无人值守道口方案1(星光级)》第一篇:无人值守道口方案1(星光级)无人值守铁路道口星光级监控解决方案实际需求随着近年来社会经济的发展,社会车辆保有量越来越多,铁路与公路交车口交通越来越繁忙。
但是由于安全教育滞后的现象客观存在,造成驾驶人员与社会人员在通过铁路道口,特别是无人值守道口时安全意识淡薄,安全状况日益险峻。
在节约人力物力的同时效益最大化的前提下,可以采用技术手段来增强无人值守铁路道口的安全防范,做到防患于未然。
解决方案与设备选型采用大华高清监控系统+太阳能供电方案1摄像机:采用dh-ipc-hf8229f采用高性能2百万像素1/1.8英寸cmos图像传感器,低照度效果好,图像清晰度高可输出200万(1920×1080)@25fps支持h.264编码,压缩比高,超低码流支持宽动态,3d降噪,强光抑制,背光补偿,数字水印,电子防抖,透雾,适用不同监控环境支持roi,svc灵活编码,适用不同带宽和存储环境支持虚焦侦测,区域入侵,拌线入侵,物品遗留/消失,场景变更,徘徊检测,人员聚集,快速移动,非法停车,音频异常侦测,人脸侦测,外部报警,客流量统计,热度图,微卡口支持报警2进2出,音频2进1出,485,rs232,bnc,hdcvi,128gsd卡,内置mic,dc12v(2w)电源输出支持g.711a、g.711mu、g.726、aac多种音频编码格式支持ac24v/dc12v/poe供电方式,方便工程安装支持abf自动后焦调节,方便工程调试维护2硬盘录像机:采用dh-nvr4104并加装3t监控级硬盘可接驳众多主流厂商(samsung、panasonic、sony、bosch、arecont、axis、honeywell、lg、vivotek、sanyo、景阳等)网络摄像机;支持断网续传anr;支持录像定向存储;支持600w像素高清网络视频的预览、存储与回放;支持1路语音对讲;支持最大16路视频实时同步回放及多路同步倒放;支持p2p (私网穿透)功能;采用dahua云台控制协议时,可以通过鼠标实现三维智能定位功能;最大支持6路1080p解码能力;最大支持16画面分割;支持预览图像与回放图像的电子放大;支持按事件查询、回放、备份录像文件,支持图片本地回放与查询;支持数字水印校验;采用监控级3t硬盘可以保证整个系统有3个月的有效存储时间3常亮补光灯常量、频闪型号可选采用cree高性能冷白led,光源高效、节能环保支持低照度下受相机控制自动开启补光支持低照度光敏自动开启补光,可配置阀值支持亮度受相机可调支持亮灭受相机可调支持led灯远程在线故障显示频闪支持补光同步频闪支持频率可调频闪持续时间、频闪延时可调4阳能供电系统供电系统由太阳能板,蓄电池,逆变器,控制器和保温箱等设备构成组件的技术参数s200w单晶硅光伏组件基本技术参数电池板组件。
无人值守实施方案

无人值守实施方案随着科技的不断发展,无人值守技术在各个领域得到了广泛的应用,其便利性和高效性受到了人们的青睐。
在实施无人值守方案时,需要考虑到各种因素,以确保其顺利进行并取得预期的效果。
本文将就无人值守实施方案进行详细的介绍,以便读者能够更好地理解和应用该技术。
首先,无人值守实施方案需要充分考虑安全因素。
在无人值守的情况下,设备和系统的安全性显得尤为重要。
因此,在实施方案中,必须考虑到各种可能的安全隐患,并采取相应的措施进行预防和保护。
比如,在无人驾驶汽车的实施方案中,需要确保车辆的自动驾驶系统能够及时发现并应对各种交通情况,以确保行车安全。
其次,无人值守实施方案还需要考虑到设备的稳定性和可靠性。
在无人值守的情况下,设备需要能够长时间稳定运行,并且能够自动应对各种突发情况。
因此,在实施方案中,需要充分考虑设备的质量和性能,以确保其能够满足长时间、高强度的工作需求。
比如,在工厂生产线的无人值守实施方案中,需要确保设备能够稳定运行,并且能够自动排除各种故障,以确保生产的顺利进行。
另外,无人值守实施方案还需要考虑到数据的安全和隐私保护。
在无人值守的情况下,设备和系统往往需要进行大量的数据交换和处理,因此需要采取相应的措施来保护数据的安全性和隐私性。
比如,在智能家居系统的无人值守实施方案中,需要采取加密和权限控制等措施来保护用户的隐私数据,以确保用户的信息不会被泄露或滥用。
最后,无人值守实施方案还需要考虑到人机交互的便利性和友好性。
在无人值守的情况下,设备和系统往往需要能够自动完成各种操作,因此需要考虑到人机交互的便利性和友好性,以确保用户能够方便地使用和管理设备和系统。
比如,在智能家居系统的无人值守实施方案中,需要设计简洁直观的用户界面,以确保用户能够方便地进行各种操作和管理。
综上所述,无人值守实施方案需要充分考虑安全性、稳定性、数据安全和人机交互等因素,以确保其顺利进行并取得预期的效果。
希望本文的介绍能够对读者有所帮助,使他们能够更好地理解和应用无人值守技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 编写目的本文对XX钢铁内部的铁路道口无人值守系统的技术方案进行分析和设计,用来指导该系统的详细设计。
2 铁路道口现状2.1 道口2.1.1 道口设备参数和运行情况2.1.1.1主要道口设备参数道口设备道闸控制:电源220V AC,遥控器控制,抬/落杆时间均为5秒。
通过改造后,使用开关量控制;。
报警器规格:电源36V AC,采用100W灯泡。
目前,道口的电源都是来自于附近的高炉,均为220V AC。
2.1.1.2设备运行情况道口报警与道闸动作的时间关系为:火车头(或尾)接近道口50米左右时,声光报警响起;然后等待15~20秒后,开始落下道闸杆;火车尾(或头)一过道口离开段,马上抬杆放行。
延时2秒左右,取消声光报警。
2.1.2 各个道口基本情况2.1.2.11#道口1#道口指1#高炉与炼钢厂之间的大道口。
机动车和人均允许通过。
当夏天雨季来临时,1#道口附近的铁轨会严重积水,铁轨表面就会布满水,清理水需要5~6小时。
1#道口的道口值班室,职能包括:轨道衡值班、火车调度值班等。
目前,1#道口因施工停止通过。
2月份后,炼钢厂需要向北扩,与轧钢厂的位置平齐,靠1#道口比较近(具体距离见后面的道口平面图);炼钢厂北移后,炼钢厂北面中间的轨道向东移,因此,该轨道从炼钢厂出来后将变直。
另外,炼钢厂北扩后,会新建转炉,因此,天车吊铁水罐的位置也会向北移20多米。
粗略估计,当火车头卸下铁水罐,离开一段距离停止时,火车头离道口只有5~6米。
在炼钢厂内,2条铁道是分开的,而且西边轨道比东边的长10多米。
2.1.2.22#道口2#道口(小):指1#高炉与炼钢厂之间的小道口,主要通过铲车,上露天料;一般不允许其它机动车通行;允许人走。
2.1.2.33#道口3#道口(小):指1#高炉与2#高炉之间的小道口,主要是人行道口,不走机动车。
2.1.2.44#道口4#道口:指2#高炉与3#高炉之间的大道口,机动车和人均允许通过。
目前声光报警器和道闸均配备,最为繁忙。
2.1.2.55#道口5#道口:指3#高炉与4#高炉之间的道口。
只通过铲车上露天料,一般不允许通过其它机动车;允许人通行。
2.2 高炉1#高炉比较特殊,向南没有铁轨,出铁水过程为:火车向北运行,经道岔并到东边轨道,然后倒车向南运行到炼钢厂。
1#高炉附近的单轨在改造后,会变短,大概10米左右(现30米左右)。
2#高炉、3#高炉和4#高炉内部的轨道均为双向轨道,火车都可以双向运行。
一般情况下,当1#高炉(450m3)、2#高炉(580m3)、3#高炉(450m3)都正常运行时,需要2辆火车在轨道运行。
当4#高炉(1080m3)正常生产时,需要3~4辆火车在铁道上运行。
2.3 铁道和火车相关2.3.1 基本铁道参数铁轨参数:50铁轨,50kg/m,长12.5m。
火车轮间距:1435mm。
火车车头单侧2个车轮,铁水包单侧4个车轮。
2.3.2 火车运行情况火车运行速度:5~6Km/h,空载车(以下简称“空车”)速度稍高,装载铁水的火车(以下简称“实车”)速度较低,一般要求不超过5Km/h。
一般情况下,火车会拉3~4节左右的铁水罐(每节铁水罐长度为7.5米,车头基本也7.5米)。
火车拉的铁水罐数量因铁道的不同而不同,其中,东边的铁道(该轨道在炼钢厂的尽头有坑道,比西边的短10多米),最多允许拉4节铁水罐;西边的铁道,最多允许拉7节铁水罐。
一般情况下,1个车头用1个铁道:空车拉,实车倒,车头始终朝北。
其中,当实车到达炼钢厂后,到达合适位置。
处于安全考虑,火车头卸下铁水罐,开出来后在外面,等待铁水罐清空,再挂上空铁水罐。
有时,空载火车头会到别的高炉,拉新的铁水罐。
正常情况下,如果需要换车头,都会将火车停在1#道口附近的道岔上,即3条轨道变2条轨道附近。
火车走在铁路上,偶尔调头回去,发生这种情况的原因为:轨道衡没有出现合适的质量数,需要火车倒回去重新通过一遍轨道衡,因此,不可能出现火车倒回到出发位置(如某个高炉或炼钢厂)的情况。
2.4 其它2.4.1 铁水包维修铁水包在使用的过程中,需要及时维修。
维修铁水包的火车行车路线为:从炼钢厂出来回1#道口附近的道岔口,再换道岔后再到铁水包修理厂。
当每一包铁水倒向钢包时,都会安排人来检查包内有无耐火砖脱落和缺损等情况;铁水包使用寿命没具体时间参考值。
2.4.2 火车头维修火车头维修路线厂方未定,估计2月下旬能确定此事。
初步设想是:将维修点设在1#道口的值班室附近最西边的轨道上。
2.4.3 轨道衡轨道衡安装在1#道口附近,属于动态衡,因此,轨道衡不影响火车从道口通过:当火车通过轨道衡到道口时,正常声光报警和落杆。
只有轨道衡测重不正常时,才需要将火车倒回去,重新称重。
2.5 铁道及道口平面示意图图1 1#道口到3#道口平面示意图报警灯道闸NE图2 3#道口以北平面示意图3 铁路道口无人值守系统特点铁路道口无人值守系统利用视频监控、自动控制和计算机网络三种技术的有机结合,通过将有人值守道口改进为“无人值守道口”,并在后台的控制中心,通过实时视频图像和控制技术,实现对散布在厂区的各个道口进行控制。
铁路道口无人值守系统,具有以下主要特点:⏹安全性高:全景图像实时、清晰、无死角,实时,保证道口有较高的安全性。
⏹扩容性高:系统具有较好的模块化结构,当需要增加道口数量时,可以简单修改和设置,就可满足更多道口的设立要求,提高经济性,也节省了成本。
⏹视频录像提高道口相关人的安全意识:视频录像技术有助于提高行人及机动车驾驶员的安全意识,辅助事故处理。
而且,通过完善的技术防范和警示设备,来减少安全隐患发生的几率。
⏹节约人力成本,提高生产效率:将道口改为无人值守后,减少有人值守时值班人员责任心不同带来的差异,提高生产效率,同时也节省人工。
⏹改善企业环境:道口警示明确,自动化程度较高,进一步优化了企业内部环境。
4 铁路道口无人值守系统组成与功能4.1 硬件系统结构硬件系统结构包括:系统网络拓扑、系统组成与功能、主要设备特性介绍。
4.1.1 系统的网络拓扑铁路道口无人值守硬件系统,其网络拓扑如图3所示。
图3 铁路道口无人值守硬件系统的网络拓扑图第7 / 15页整个系统的控制室设在1#道口值班室。
1#道口和4#道口配备完整的道口设备,包括:铁轨传感器、红外对射器、声光报警器、信号灯和道闸、功放和音箱、摄像头;2#、3#、5#小道口,只配备铁轨传感器和声光报警器。
道口设备与控制室计算机系统之间详细的连接关系,如图4所示。
图4 单个铁路道口无人值守硬件系统图其中:⏹控制台通过网络,控制录像的录制,以及在本机显示器或大屏幕显示器上回放。
⏹大屏幕显示屏:可以为27吋以上的液晶显示器,通过VGA接口连接到视频服务器(即硬盘录像机)上。
⏹视频服务器通过多个BNC输入接口,来连接多个视频光端机的模拟视频信号。
⏹拾音器输出接到视频光端机的音频输入接口上,实现后台中控室向道口现场发送紧急广播。
视频光端机的音频输出到功放上,将音频放大后再到喇叭输出。
⏹铁轨磁感式传感器和红外对射器将火车接近/离开的信息输入到道口控制器上,尤其进行逻辑判断后,决定信号灯、声光报警器和道闸的动作情况。
4.1.2 系统组成及功能铁路道口无人值守硬件系统,包括三部分:道口设备系统、光纤通信系统、后台调度指挥系统。
4.1.2.1道口设备系统道口设备系统包括:铁轨压力传感器、道闸、道口信号灯、声光报警灯、摄像头等设备,以及道口控制器。
⏹铁轨压力传感器:检测火车到达道口和离开道口附近的信号,其信号输出至道口控制器。
⏹道口控制器:根据火车到达道口和离开道口信号,控制道闸、道口信号灯、报警灯和蜂鸣器等道口设备的动作;与后台的控制台控制信息;对音频信号的输出进行适当的功率放大。
⏹道闸:阻止/允许行人和车辆的通行。
⏹道口信号灯:分为红、黄、绿三色,功能同一般路口的交通信号灯。
⏹声光报警灯:发出声光,进行报警。
⏹摄像头:拍摄道口的火车接近/离开情况。
4.1.2.2光纤通信系统光纤通信系统主要为光纤、视频光端机、光电转换器等。
⏹视频光端机:视频信号和音频信号的光电转换。
⏹光电转换器:控制信号的光电转换。
注:光电转换器未画在拓扑图中。
4.1.2.3后台调度指挥系统后台调度指挥系统:包括视频服务器、数据库服务器、控制台、大屏幕显示器(选用)和集线器等。
⏹视频服务器主要为硬盘录像机,将每次录制的视频按照一定的规律进行存放;并输出视频信号到控制台上实时显示。
⏹数据库服务器主要记录火车每次到来和离开的时间、值班人等信息;为每次操作建立日志;为以后扩展预留数据接口(如火车运送的铁水信息、火车司机个人信息等)。
⏹控制台主要是监控道口传输过来的视频录像,并根据情况进行操作。
⏹大屏幕显示器,将道口传输过来的视频录像放大,方便后台调度指挥系统操作员离开控制台,在较远的距离来查看道口情况。
4.1.3 传感器布局方案根据对道口附近建筑物相对位置,以及火车运行轨迹和规律,确定传感器布局方案,道口传感器的布局方案有两种:单轨道8个传感器布局方案和单轨道3个传感器布局方案。
4.1.3.1单轨道8个传感器布局方案单轨道8个传感器布局方案指单条轨道按行驶方向分为上行路线和下行路线。
上行路线在本方向上火车接近点放置2个传感器,离开点放置2个传感器;下行路线的放置方法相同。
为保证可靠,在1#和4#大道口,布设红外对射器,来确定火车位置。
4.1.3.1.1应用范围单轨道8个传感器布局方案用于1#大道口和4#大道口,其中,1#大道口较宽,布设4对红外对射器;4#大道口布设2对红外对射器。
一般情况下,接近点的传感器离道口约40~50米,离开点距离道口几米左右,具体位置视道口附近的建筑物相对距离而定。
4.1.3.1.2判断逻辑简介利用2个传感器的输出信息,来判断火车运行的方向,然后再确定是接近点还是离开点。
接近点启动报警(启动报警包括启动报警器,以及延时后道闸落杆),离开点解除报警(解除报警包括道闸起杆,以及延时后关掉报警器)。
如遇两辆火车在道口附近对开,则用最先达到接近点的火车时刻启动报警,而以最后离开的离开点的火车时刻解除报警。
4.1.3.2单轨道3个传感器布局方案单轨道3个传感器布局方案指单条轨道在两个行驶方向的接近点各放置1个传感器,道口边放置1个作为离开点,属于相对简化的布局方案。
4.1.3.2.1应用范围单轨道3个传感器布局方案用于2#、4#和5#小道口。
4.1.3.2.2判断逻辑简介到火车到达接近点(不论是离开道口,还是接近道口)启动报警。
若在一定延时时间内收到离开点的传感器信号,则解除报警,火车到达另一接近点时,则复位整个判断过程。
4.1.4 主要设备特性简介现简单介绍目前调研的几款主要设备的特性。
4.1.4.1道口控制器道口控制器特点包括:⏹提供多达32路磁感式传感器输入接口。