ARM开发环境
arm的开发方案

ARM的开发方案1. 引言ARM(Advanced RISC Machines)是一种精简指令集计算机(RISC)架构,被广泛应用于移动设备、嵌入式系统和低功耗应用等领域。
本文将介绍ARM的开发方案,包括硬件和软件层面的开发工具和技术。
2. 硬件开发工具和技术在ARM的硬件开发过程中,我们可以使用以下工具和技术:2.1. 开发板和芯片选择合适的开发板和芯片对于ARM的开发至关重要。
一些常用的开发板包括Raspberry Pi、Arduino和STM32等,而常用的芯片包括ARM Cortex-M、Cortex-A系列等。
根据具体的应用需求和性能要求,选择合适的开发板和芯片。
2.2. 集成开发环境(IDE)在ARM的硬件开发过程中,集成开发环境是必不可少的。
常用的开发环境包括Keil MDK、Eclipse、IAR Embedded Workbench等。
这些IDE提供了编译、调试和仿真等功能,可以极大地提高开发效率。
2.3. 调试工具为了方便调试和分析程序,我们可以使用一些专门的调试工具。
常用的调试工具包括JTAG(Joint Test Action Group)和SWD(Serial Wire Debug)等。
这些工具可以帮助开发人员监视和修改程序的执行过程,便于定位和解决问题。
2.4. 仿真和模拟器在开发过程中,通过使用仿真和模拟器工具,可以在没有硬件设备的情况下进行软件的开发和调试。
这些工具可以模拟硬件的行为和运行环境,提高开发效率和降低开发成本。
3. 软件开发工具和技术ARM的软件开发过程中,我们可以使用以下工具和技术:3.1. 编程语言ARM的软件开发可以使用多种编程语言,包括C、C++、Python等。
其中,C 语言是最常用的一种,它可以直接访问硬件和控制外设,适合嵌入式系统的开发。
3.2. 软件开发库为了简化开发过程和提高效率,ARM提供了一些开发库,如CMSIS(Cortex Microcontroller Software Interface Standard)和HAL(Hardware Abstraction Layer)等。
ARMads1.2开发环境的搭建使用

ARMads1.2开发环境的搭建使⽤ARM开发环境的搭建安装平台(ads_1.2(arm 开发⼯具).iso,⽬前存放在D:\汇⽂\arm\⼯具及软件),在windows下安装。
步骤1:双击打开:ads_1.2(arm 开发⼯具).iso-》双击setup.exe,此软件安装完成后需要注册,注册⽂件在ads_1.2(arm 开发⼯具).iso中的crack⽂件夹的license.dat中,将此⽂件导⼊完成后即安装完毕。
步骤2:打开AXD进⾏配置(1):点击进⼊(2):(3)(4):ADD 完成后点击进⼊configure(5)先选择TCP/IP,然后填⼊127.0.0.1的本地回环,过后还要修改回来。
进⼊JTAG,修改JTAG为4800KHZ;(6)完后后会提⽰出错,(7)完成以上步骤后保存设置:file-》save session (保存地址最好在根⽬录下,最好不要有中⽂(⽬前我的安装版本保存在:D:\AXD_session 下;))(8)以上完成后开始OXD-》option-》configure interface,导⼊完成后从新保存并覆盖上⼀步的保存信息。
下次使⽤的时候需要将这些保存信息导⼊才能使⽤。
以上过程可打开jlink的GDB⼯具,⽤于监视单板的连接情况。
(打开SEGGER->jlink GDB)(9)完成以上步骤后,开始进⼊《metroworks codewarrior for ARM Developer suite v1.2》进⾏设置1.⾸先在file 内open⼀个已经ok的程序(在D:\AXD_session\YC2440_LED中的YC2440_LED.mcp),进⼊以下界⾯:备注:metroworks codewarrior for ARM Developer suite v1.2同AXD 的关系,metroworks codewarrior for ARM Developer suite v1.2⽤于编辑,AXD⽤于调试2.点击seting 进⼊设置界⾯:Run ,点击后会运⾏此程序,运⾏时会⾃动打开AXDARM :32位指令, Thumb :16位精简指令使⽤介绍:1:⽣产.bin⽂件,⽤于烧录到单板中。
arm单片机
ARM单片机概述ARM单片机是嵌入式系统中常用的一种微控制器。
它基于ARM架构,具有高性能、低功耗、多功能、易开发等特点。
ARM单片机广泛应用于智能家居、工业自动化、汽车电子、智能穿戴等领域,成为嵌入式开发的重要组成部分。
ARM架构ARM架构是一种精简指令集(RISC)架构。
它的特点是指令集精简、代码紧凑、运行效率高,可有效降低功耗,提升性能。
ARM架构广泛应用于各种类型的设备,从低端嵌入式系统到高端的服务器和超级计算机都有应用。
ARM单片机的优势ARM单片机相比于其他微控制器具有以下优势:•高性能:ARM单片机采用现代的微架构设计,具有出色的处理性能和运算能力。
•低功耗:ARM单片机采用低功耗设计,能够在低电压下工作,延长电池寿命。
•多功能:ARM单片机具有丰富的外设接口和功能模块,能够满足各种应用需求。
•易开发:ARM单片机支持多种开发工具和开发环境,提供了丰富的软件库和示例代码,方便开发人员快速开发应用。
ARM单片机开发工具和环境ARM单片机的开发通常需要以下工具和环境:1.开发板:ARM单片机的开发板通常集成了单片机芯片和丰富的外设接口,方便开发人员进行硬件连接和调试。
2.开发工具链:ARM单片机的开发工具链包括编译器、调试器、烧录器等工具。
常用的开发工具链有Keil、IAR等。
3.开发环境:ARM单片机的开发环境通常是集成开发环境(IDE),提供了代码编辑、编译、调试和烧录等功能。
常用的开发环境有Keil MDK、IAR Embedded Workbench等。
4.软件库:ARM单片机的开发通常使用相应厂商提供的软件库,包括外设驱动、中断处理等功能的库文件。
ARM单片机的应用场景ARM单片机广泛应用于各种嵌入式系统中,包括但不限于以下场景:1.智能家居:ARM单片机用于控制家庭中的照明、空调、窗帘等设备,实现智能化管理和控制。
2.工业自动化:ARM单片机用于控制工业设备、机器人和自动化生产线,提高生产效率和安全性。
ARM开发环境搭建 eclipse for arm实验报告
实验报告实验题目ARM开发环境搭建 eclipse for arm姓名:学号:课程名称:所在学院:专业班级:任课教师:一、实验目的与要求:1、掌握 ARM 汇编语言的基本使用和一些伪指令的使用;2、熟悉 eclipse 开发工具建立汇编工程和仿真;四、实验过程、步骤及内容1、win7环境安装FS_JTAG工具(1)安装GCC 编译工具双击安装“华清远见-CORTEXA9 资料\工具软件\Windows\FS-JTAG\Yagarto 工具包”目录下的文件:yagarto-bu-2.21_gcc-4.6.2-c-c++_nl-1.190_gdb-7.3.1_eabi_20111119.exe(2)装Yagarto 工具包双击安装“华清远见-CORTEXA9 资料\工具软件\Windows\FS-JTAG\Yagarto 工具包”目录下的文件:yagarto-tools-20100703-setup.exe(3)安装FS_JTAG调试软件双击“x包”下的setup.exe安装FS_JTAG工具(4)安装FS_JTAG驱动将FS_JTAG通过USB线与PC连接,右键点击“我的电脑”选择“管理”,在左侧栏里选择“设备管理”选择“其他设备”右键点击选择“更新驱动”选择“浏览计算机以查询驱动程序软件(R)”;点击浏览选择“FS-JTAG 调试工具(安装包)\DRIVER”目录主要“包括子文件夹”必须选择,点击“下一步”。
安装过程出现上图提示,点击“始终安装此驱动程序软件(I)“继续安装点击“关闭“完成安装注意:此安装过程需要进行 3 次,直到设备管理器中没有叹号标记或未知设备。
这是设备管理器中会出现如下选项:如果下面选项没有全部出现,右键点击有黄色叹号的选项更新驱动,过程同上。
(5)安装JRE双击安装“华清远见-CORTEXA9 资料\ 工具软件\Windows\FS-JTAG\JRE ”目录下的文件: jre-6u7-windows-i586-p-s.exe2、连接硬件平台按下图所示,连接仿真器、USB 转串口线、电源。
第四节arm汇编语言设计

示例:
AREA example,CODE,READONLY ENTRY ;应用程序的入口点
END
语法格式:
END END伪指令用于通知编译器已经到了源程序的结尾。
示例: AREA example,CODE,READONLY ……
END
EQU
语法格式: 名称 EQU 表达式{,类型}
EQU:“ * ”
DCFD
DCFS DCFD
3.725e15
0x7FC00000 &FFF0000000000000
数字表达式
操作符 NOT按位取反 :NOT:A
+、-、×、/ 及MOD算术操作符
A+B,A-B,A×B,A / B,A:MOD:B
ROL、ROR、SHL及SHR移位(循环移位)操作
A:ROL:B,A:ROR:B,A:SHL:B,A:SHR:B AND、OR、EOR按位逻辑操作符 A:AND:B,A:OR:B,A:EOR:B
RIGHT
CC
A:RIGHT:B
A:CC:B
字符串表达式
示例
GBLS STRING1
GBLS STRING2
STRING1 SETS “AAACCC” STRING2 SETS “BB”:CC:(STRING1:LEFT:3) ;STRING2:“BBAAA”
数字表达式
整数数字量
示例:
令的目标地址,或者代码段中的少量数据。
基于寄存器的标号: 用MAP,FIELD伪操作定义。汇编时将被处理成寄存器的值加 上或减去一个数字常量。常用于访问位于数据段中的数据。 绝对地址:
32位数字量
数字常量
数字常量是32位的整数
无符号数:0~232-1 有符号数时:-231~231-1。
Fedora9 下搭建Qt Creator的ARM开发环境并移植Qt4.6.3-books到mini2440

到/downloads-cn下载最新版的软件包,当前是:
1、用于 Linux/X11 32位 的 Qt Creator 2.0.0 二进制软件包Qt SDK for Linux/X11 32-bit** (371 MB)( /qtsdk/qt-sdk-linux-x86-opensource-2010.04.bin)
-no-opengl \
-no-cups \
-no-glib \
-no-xcursor -no-xfixes -no-xrandr -no-xrender \
-no-separate-debug-info \
-nomake examples -nomake tools -nomake docs \
# make
# make install
我下载的包解压后没有configure文件,需要运行autogen.sh后才能生成。
9、进入qt-everywhere-opensource-src-4.6.3-arm目录编译安装
首先先配置:
注:必须加上“-prefix /usr/local/Trolltech/QtEmbedded-4.6.3-arm ”参数, 不然安装后不在QtEmbedded-4.6.3-arm文件夹下,而是覆盖了QtEmbedded-4.6.3。
1234 dev lib opt sbin usr
Settings etc linuxrc proc sys var
bin home mnt root tmp www
5. 编译 PC 版:
进入pc目录
#./configure
# gmake
# gmake install
实验二 ARM开发工具MDK开发环境的熟悉
实验二 ARM开发工具MDK开发环境的熟悉一、实验目的:1、掌握MDK建立工程、设置工程的方法;2、掌握MDK编译工程、链接工程的方法;3、掌握MDK仿真调试的方法;二、实验内容1、参考本次实验的实验步骤,完成本次实验,以及实验步骤中的几个思考题2、参考教材117页有关MDK工具的配置回答以下几个问题(1)MDK提供的两种调试模式(2)如何在工程中打开存储单元观察窗口(3)如何在工程中设置断点三、实验原理:Keil公司(该公司已被ARM公司收购!!)开发的ARM开发工具MDK(Microcontroller Development Kit),是用来开发基于ARM核的系列微控制器的嵌入式应用程序。
它适合不同层次的开发者使用,包括专业的应用程序开发工程师和嵌入式软件开发的入门者。
MDK包含了工业标准的Keil C编译器、宏汇编器、调试器、实时内核等组件,支持所有基于ARM的设备,能帮助工程师按照计划完成项目。
注意:下面所描述的s3c2410 GPIO口的工作原理大家能看懂多少就懂多少,本次实验课的重点不是GPIO工作原理,重点在MDK开发环境的熟悉!!嵌入式系统在控制领域的应用非常广泛,嵌入式芯片是通过外部管脚来和所控制的设备进行通信的。
嵌入式芯片S3C2410和外部设备最简单的通信方式就是通过GPIO(通用IO 管脚)来通信的。
S3C2410通过读写与GPIO相关联的一组寄存器以实现读写GPIO管脚电平信号(大家可以回想以下在单片机中是怎么通过P0端口寄存器来控制P0.0------P0.7八个管脚的?)。
当然,S3C2410的GPIO的操作比51单片机要些许复杂一点。
本实验的电路图如下:图中的GPF4表示这个管脚是与S3C2410的通用端口F组的第4根管脚,其余类推。
实验相关寄存器说明(以后一定要学会看下面的几个表格):GPFCON――端口配置寄存器。
GPFCON为通用端口F组的管脚工作状态配置寄存器。
第一章 ARM实验板硬件结构与开发环境
6
U15
ADC2
15
RP3
5
JP1 JP2 J1
16
S1
VIN2 VIN1
S2
S3
S4
S5
S6
S7
S8
4
S9 S10 S11 S12 S13 S14 S15 S16 Key
1. 电源插座 2. 外部电压测试端口 3. 按键区域(17个按键) 4. RS232接口 5. 4位数码管 6. 触摸屏接口 7. 液晶屏接口 8. 液晶屏亮度调节旋钮 9. 8个LED灯 10.核心板插座 11.喇叭接口 12.LED灯外部测试端口 13.蜂鸣器 14.电位器区域 15.AD采样源设置跳线 16.外部端口连接区域
DA
RS485
Count
ADC1
1
PWM
RP4 123
RP1
RP2
1
2
3
RS232
二、开发环境
ADS集成开发环境,其成熟版本为ADS1.2。支持软件调试及JTAG硬 件仿真调试,支持汇编、C和C++源程序,具有编译效率高,系统库功 能强等特点。
ADS1.2集成开发环境的组成
名称 代码生成工具 集成开发环境 调试器 指令模拟器 ARM开发包 ARM应用库 描述 ARM汇编器,ARM的C、C++编译器, Thumb的C、C++编译器,ARM连接器 Code Warrior IDE AXD,ADW/ADU,armsd ARMulator 一些底层的程序例子,使用程序 C、C++函数库等 使用方法 由Code Warrior IDE调用 工程管理,编译链接 仿真调试 由AXD调用 由Code Warrior IDE调用 用户程序使用
ARM常用开发环境

功能
声明和初始化一个全局算术变量,初始值为0
声明和初始化一个全局逻辑变量,初始值为{FALSE}
声明和初始化一个全局字符串变量,初始值为空
声明和初始化一个局部算术变量,初始值为0。局部算术变量只
能在宏中进行声明。
声明和初始化一个局部逻辑变量,初始值为{FALSE}。局部逻辑变 量只能在宏中进行声明。
(以上第2~4步任何一步有错都应返回到第1步重来)
汇编语言、汇编语言源程序、目标程序、可执行程序
助记符指令、伪指令
汇编、汇编器(汇编软件、汇编程序)
11/52
符号定义伪指令
符号类型
符号定义 伪指令
2021-8-17
指示符
GBLA GBLL GBLS LCLA
LCLL
LCLS
SETA SETL SETS RLIST
杯内壁,定量转移至250mL容量瓶中,用水稀释至刻度,摇匀。计算锌离子的准确浓 度,贴上标签备用。用移液管移取25.00mL锌离子标准溶液于250mL锥形瓶中,加5mL 缓冲溶液及少量铬黑T指示剂,摇匀,然后用EDTA滴定至溶液由酒红色变为纯蓝色, 即为终点。平行做3次,按下式计算EDTA溶液的物质的量浓度。
2. C/C++语言和汇编语言的混合编程
2021/8/17
ARM常用开发环境
一.基于Windows平台
– ADS ,目前已经基本被替代 – RealView Developer Suite(RVDS)
CodeWarrior IDE+RV Debugger – Embedded Workbench for ARM(EWARM) ,IAR
1.EDTA溶液的配制和标定 (1)0.01mol•L-1 EDTA溶液的配制
ARM嵌入式开发实例1-2

ARM嵌入式开发实例1-2
1. 引言
在嵌入式领域,ARM架构是最常用的处理器架构之一。
ARM嵌入式开发涉及到硬件设计、软件开发、驱动程序编写等多个方面。
本文将介绍一个ARM嵌入式开发的实例,以帮助读者更好地理解和应用ARM相关技术。
2. 实例介绍
本实例基于ARM Cortex-M系列处理器开发一个简单的LED控制程序。
通过这个实例,读者可以学习到如下内容:
•嵌入式系统的概念和根本原理
•ARM Cortex-M处理器的根本架构和特点
•使用Keil MDK开发环境进行ARM嵌入式开发
•硬件和驱动程序设计的根本技巧
该LED控制程序将使用一个ARM开发板和一只LED灯。
通过编程控制,可以实现LED的亮灭控制。
3. 环境搭建
在开始实例之前,需要搭建好开发环境。
以下是搭建环境的步骤:
1.安装Keil MDK开发环境
2.配置编译器和调试器
3.连接ARM开发板
4.安装驱动程序
完成以上步骤后,就可以开始进行ARM嵌入式开发了。
4. 程序设计
4.1 硬件设计
该实例使用一个ARM开发板和一只LED灯。
首先,需要将LED灯连接到开发板上的一个GPIO引脚上。
具体连线方式可以参考开发板的硬件手册。
在连接完成后,就可以进行软件开发了。
4.2 软件开发
首先,在Keil MDK中创立一个新的工程。
然后,在工程中添加相关的源文件和头文件。
在源文件中,我们需要编写代码来控制LED灯的亮灭。
以下是一个简单的LED控制函数的例如代码:
```c #include。
ARM-linux嵌入式开发环境安装参考手册
基础是你已经安装了Ubuntu,以及相关软件:超级终端minicom 及C/C++ compiler environment. 在Ubuntu上可使用下面终端命令安装minicoom和编译环境。
#sudo apt—get install minicom#sudo apt-get install build—essentialStep 1:将光盘 Linux 目录中的 arm—linux—gcc-4。
5.1—v6—vfp—20101103。
tgz 复制到 Lubuntu的当前目录下,执行解压命令:#sudo tar xvzf arm-linux-gcc-4.5.1-v6-vfp—20101103。
tgz –C /注意:C 后面有个空格,并且C 是大写的,它是英文单词“Change”的第一个字母,在此是改变目录的意思.这样 arm—linux-gcc 的相关文件就Copy到root用户的Opt目录中Step 2:把编译器路径加入系统环境变量,运行命令#sudo gedit ~/.bashrc编辑~/.bashrc 文件,注意“ bashrc ” 前面有一个“ . ”,修改最后一行为export PATH=$PATH:/opt/FriendlyARM/toolschain/4.5。
1/bin注意路径一定要写对,否则将不会有效。
如图,保存退出。
输入arm—linux—gcc –v,会出现如下信息,这说明交叉编译环境已经成功安装。
Step 3:编译链接 arm-qte-4。
7。
01) 解压包到自己制定的目录,例如 arm-qte-4.7。
02) 终端中运行。
/build-all(首先,注意不能双击运行,必须在终端中运行;其次,不使用 sudo)大约要安装2个小时当运行到出现如下提示后:cd src/tools/bootstrap/ && make -f Makefile installmake[1]:正在进入目录`/home/administrator/arm-qte-4.7。
基于全志H3芯片的ARM开发环境搭建

基于全志H3芯⽚的ARM开发环境搭建基于全志H3芯⽚的ARM开发环境搭建最近买了个友善之臂的NanoPi M1板⼦,⼜在⽹上申请了个NanoPi NEO板⼦,这两个都是基于全志H3芯⽚的Crotex-A7四核ARM开发板,两个板⼦可以共⽤⼀套开发环境,本⽂就以NanoPi NEO为例,简单讲述基于全志H3芯⽚的ARM开发环境搭建。
1. 安装交叉编译⼯具1.1 获取交叉编译⼯具在百度⽹盘中,给出了Nanopi NEO的交叉编译⼯具:注意:第⼀个 gcc-linaro-arm.tar.xz 是⽤友善之臂给出的脚本编译⽣成固件的;如果需要交叉编译⼯具编译应⽤程序或者内核,需要使⽤第⼆个 arm-cortexa9-linux-gnueabihf-4.9.3-20160512.tar.xz ⼯具。
1.2 安装交叉编译⼯具解压:arm-cortexa9-linux-gnueabihf-4.9.3-20160512.tar.xz,得到 4.9.3 ⽬录,与其他平台搭建交叉编译环境⽅法⼀样,将该⽬录复制到 /usr/local/arm/ ⽬录下设置环境变量,在 ~/.bashrc 最后添加:# vim ~/.bashrcPATH=$PATH:/usr/local/arm/4.9.3/bin/export PATH重启或者注销⽤户再登录即可使⽤该交叉编译⼯具。
1.3 验证安装是否成功验证交叉编译⼯具是否安装成功:$ arm-cortexa9-linux-gnueabihf-gcc -vUsing built-in specs.COLLECT_GCC=arm-cortexa9-linux-gnueabihf-gccCOLLECT_LTO_WRAPPER=/usr/local/arm/4.9.3/bin/../libexec/gcc/arm-cortexa9-linux-gnueabihf/4.9.3/lto-wrapperTarget: arm-cortexa9-linux-gnueabihfConfigured with: /work/toolchain/build/src/gcc-4.9.3/configure --build=x86_64-build_pc-linux-gnu --host=x86_64-build_pc-linux-gnu --target=arm-cortexa9-linux-gnueabihf --prefix=/opt/FriendlyARM/toolchain/4.9.3 --with-sysroot=/opt/FriendlyARM/too Thread model: posixgcc version 4.9.3 (ctng-1.21.0-229g-FA)1.4 验证交叉编译⼯具是否能正常编译验证安装的交叉编译⼯具编译的程序在Nanopi NEO板⼦上能够运⾏:1)先写⼀个简单的验证程序,也就是程序员”家喻户晓“的 Hello world!$ cat hello.c#include <stdio.h>int main(void){printf("Hello world!\n");return 0;}2)将程序交叉编译为板⼦能运⾏的程序:$ arm-cortexa9-linux-gnueabihf-gcc hello.c -o hello3)编译完成后⽣成的hello程序,查看⽂件属性:$ file hellohello: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), dynamically linked, interpreter /lib/ld-linux-armhf.so.3, for GNU/Linux 3.0.8, BuildID[sha1]=e471478037c7cf740dadac9ec82136aad38f0c4e, not stripped2. 将程序通过NFS⽂件系统复制到开发板2.1 先让板⼦连上⽹1)确保板⼦已经能够正常联⽹:# ifconfigeth0 Link encap:Ethernet HWaddr **:**:**:**:**:**inet addr:***.***.*.*** Bcast:***.***.*.255 Mask:255.255.255.0inet6 addr: ****::****:****:****:****/64 Scope:LinkUP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1RX packets:820 errors:0 dropped:0 overruns:0 frame:0TX packets:637 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:1000RX bytes:513171 (501.1 KiB) TX bytes:49921 (48.7 KiB)Interrupt:114lo Link encap:Local Loopbackinet addr:127.0.0.1 Mask:255.0.0.0inet6 addr: ::1/128 Scope:HostUP LOOPBACK RUNNING MTU:16436 Metric:1RX packets:33 errors:0 dropped:0 overruns:0 frame:0TX packets:33 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:0RX bytes:3304 (3.2 KiB) TX bytes:3304 (3.2 KiB)2)ping外⽹,检测是否能和外⽹通讯:# ping PING (163.177.151.110) 56(84) bytes of data.64 bytes from (163.177.151.110): icmp_seq=1 ttl=53 time=11.1 ms 64 bytes from (163.177.151.110): icmp_seq=2 ttl=53 time=10.3 ms 64 bytes from (163.177.151.110): icmp_seq=3 ttl=53 time=10.6 ms ^C--- ping statistics ---3 packets transmitted, 3 received, 0% packet loss, time 2003msrtt min/avg/max/mdev = 10.356/10.740/11.183/0.350 ms2.2 安装NFS服务器并配置NFS⽬录1)安装NFS服务器# sudo apt-get install nfs-kernel-server2)创建NFS⽬录:# vim /etc/exports添加:/mnt *(rw,sync,no_root_squash,no_subtree_check)3)重启NFS服务器:# systemctl restart nfs-kernel-server4)检查nfs是否启动:# ps -aux | grep nfsroot 39 0.0 0.0 0 0 ? S< 14:53 0:00 [nfsiod]root 29118 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29119 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29120 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29121 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29122 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29123 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29124 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29125 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29142 0.0 0.1 4136 748 ttyS0 S+ 15:56 0:00 grep nfs2.3 通过NFS⽹络服务器传输⽂件通过NFS⽹络服务器挂载,将⽂件拷贝到板⼦上:1)在PC的虚拟机上安装NFS客户端:$ sudo apt-get install nfs-common2)将板⼦的 /mnt/nfs ⽬录挂载到PC虚拟机的 /mnt ⽬录:$ sudo mount -t nfs -o intr,nolock 192.168.4.113:/mnt/nfs /mnt3)将PC虚拟机上编译好的程序拷贝到板⼦上:$ sudo cp hello /mnt在板⼦上的/mnt/nfs⽬录下就可以看到拷贝过来的程序了:# ls /mnthello在开发板上运⾏程序,验证程序是否可以在板⼦上运⾏:# ./helloHello world!验证成功,由交叉编译⼯具编译的程序在板⼦上可以正常运⾏。
arm开发环境搭建实验报告实验内容
ARM开发环境搭建实验报告一、实验目的本实验旨在帮助学生了解和掌握ARM开发环境的搭建过程,包括交叉编译环境的搭建、嵌入式系统开发环境的搭建、ARM Linux操作系统的搭建以及应用软件的开发与部署。
通过本次实验,学生将能够熟悉ARM开发的基本流程,为后续的ARM开发打下基础。
二、实验内容1. 开发环境介绍本部分将介绍ARM开发环境的基本概念、组成和搭建流程。
重点讲解ARM架构的特点、开发板的选择以及开发工具链的组成。
通过本部分的学习,学生将能够对ARM开发环境有基本的了解和认识。
2. 交叉编译环境搭建交叉编译是指在一种平台上生成另一种平台上的可执行文件。
本部分将介绍如何搭建ARM交叉编译环境,包括交叉编译工具链的安装、配置和使用。
同时,学生将通过实践操作,掌握交叉编译的基本方法。
3. 嵌入式系统开发环境搭建嵌入式系统是指专为特定应用而设计的计算机系统。
本部分将介绍如何搭建嵌入式系统开发环境,包括开发板的连接、调试工具的安装以及嵌入式操作系统的选择和烧写。
通过本部分的学习,学生将能够掌握嵌入式系统开发的基本流程。
4. ARM Linux 操作系统搭建ARM Linux操作系统是一种针对ARM架构的开源操作系统。
本部分将介绍如何搭建ARM Linux操作系统,包括操作系统的下载、烧写以及启动过程。
同时,学生将学习如何在ARM Linux上安装软件、配置网络等操作,以便进行后续的应用软件开发。
5. 应用软件开发与部署本部分将介绍如何进行ARM应用软件开发与部署。
首先,学生将学习如何使用交叉编译工具链编译应用程序;其次,学生将学习如何将应用程序部署到ARM设备上,并进行测试和调试。
通过本部分的学习,学生将能够掌握ARM应用软件开发的整个流程。
三、实验步骤1. 安装交叉编译工具链,并配置环境变量;2. 连接开发板,并安装调试工具;3. 下载并烧写嵌入式操作系统;4. 安装ARM Linux操作系统;5. 编写应用软件源代码;6. 使用交叉编译工具链编译应用软件;7. 将应用软件部署到ARM设备上;8. 进行测试和调试。
新唐ARM9----NUC972DF62Y开发环境搭建
新唐ARM9----NUC972DF62Y开发环境搭建原⽂:https:///qq_41980333/article/details/84330018最后发布于2018-11-21 22:27:461.安装虚拟机,ubuntu 16.04.5.2.安装32位库sudo apt install lib32ncurses5sudo apt install lib32z1sudo apt install lib32stdc++6sudo apt install libncurses5-dev3.把BSP复制到虚拟机,解压,可通过安装vmware tools直接拉过去,或者设置共享⽂件夹,然后再虚拟机⾥复制cd /mnt/hgfs/sharecp nuc970bsp.tar.gz /home/name/Downloadscd /home/name/Downloadstar -xvf nuc970bsp.tar.gz4.执⾏安装脚本sudo ./install.sh安装在/opt5.设置环境变量sudo vim /etc/profile末尾添加export PATH=$PATH:/usr/local/arm_linux_4.8/bin保存退出source /etc/profile输⼊arm-linux,然后按tab键,看是否⾃动补全,然后注销⽤户在重新登录6.编译UBOOTmake O=/home/ysh/Downloads/nuc970_uboot/ distclean O后⾯为编译存放的路径make O=/home/ysh/Downloads/nuc970_uboot/ nuc970_configmake O=/home/ysh/Downloads/nuc970_uboot/ all编译完成把根⽬录下的u-boot.bin和⼦⽬录nand_spl中的u-boot-spl.bin拷贝到共享⽂件夹中,待会和内核⼀起通过Nu-Writer下载再把nuc970_uboot/tools添加到环境变量中7.编译内核cd /linux-3.10.xmake nuc972_defconfigmake uImage编译完成再把上⼀层⽬录image中⽣成的⽂件拷贝到共享⽂件夹,待会下载8.打包rootfscd /opt/nuc970bsp/applications/yaffs2utilsmake cleanmake把该路径加到环境变量cd /opt/nuc970bspls可以看到rootfs⽂件夹,或者⾃⼰使⽤busybox⽣成。
ARM嵌入式系统第8章ARMADS集成开发环境

创建工程
ADS中的CodeWarrior是集管理、编辑、编译、 链接于一体的集成开发环境。用户可以利用工 程管理的思想组织项目开发中的源文件、库文 件、头文件和其他相关的输入输出文件。
工程能够将所有的源码文件有机地组织在一起, 并决定最终生成文件存放的路径,输出的格式 等。
AXD调试环境_查看反汇编代码
•ARM嵌入式系统第8章ARMADS集 成开发环境
使用JTAG仿真器来调试程序
使用AXD可以完成对程序的软件仿真调 试,但要完成硬件仿真和调试功能,则 需要通过JTAG仿真器实现ARM处理器与 主机的通信联络。
•ARM嵌入式系统第8章ARMADS集 成开发环境
使用JTAG仿真器来调试程序
•ARM嵌入式系统第8章ARMADS集 成开发环境
初始化存储器
通常ARM处理器都集成有SDRAM控制器。程序的在线 调试实际上是要将程序代码通过JTAG仿真器下载到处 理器的SDRAM空间执行,但是SDRAM在初始化上电时 并不能直接访问,必须配置它的刷新计数值、刷新时 间、刷新使能等才可以访问。
初始化存储器就是设置ARM处理器的某些寄存器,实 现对SDRAM存储空间映射的初始化过程。
EELIOD系统硬件决定了在进行JTAG调试时,一上电 SDRAM并没有初始化,故不能直接访问,下载程序前 需要先进行SDRAM的初始化工作。
•ARM嵌入式系统第8章ARMADS集 成开发环境
初始化存储器
ARMulaor可以提供指令执行时内部寄存器状况 及执行周期,可以进行应用程序的性能分析, 这样就为软硬件并行开发提供了极大的方便。
•ARM嵌入式系统第8章ARMADS集 成开发环境
ARM 环境搭建(自己总结)
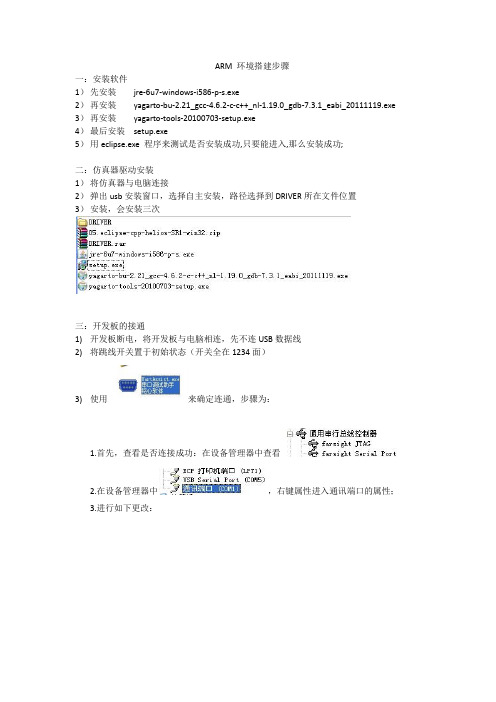
ARM 环境搭建步骤一:安装软件1)先安装jre-6u7-windows-i586-p-s.exe2)再安装yagarto-bu-2.21_gcc-4.6.2-c-c++_nl-1.19.0_gdb-7.3.1_eabi_20111119.exe 3)再安装yagarto-tools-20100703-setup.exe4)最后安装setup.exe5)用eclipse.exe 程序来测试是否安装成功,只要能进入,那么安装成功;二:仿真器驱动安装1)将仿真器与电脑连接2)弹出usb安装窗口,选择自主安装,路径选择到DRIVER所在文件位置3)安装,会安装三次三:开发板的接通1)开发板断电,将开发板与电脑相连,先不连USB数据线2)将跳线开关置于初始状态(开关全在1234面)3)使用来确定连通,步骤为:1.首先,查看是否连接成功:在设备管理器中查看2.在设备管理器中,右键属性进入通讯端口的属性;3.进行如下更改:4.进入,进行如下设置:5.点击打开,开发板上电,快速点击回车键,会看见未进行Uboot前的编号。
四:Uboot 步骤1)开发板断电,将初始状态最后的开关拨至英文边,连接USB数据线,上电,安装驱动;2)在windows 命令模式下输入arm-none-eabi-gcc-4.6.2 –v 查看安装成功状态。
3)进入4)开发板断电,设置,进入option,进行如下设置:5)开发板上电,进入,点击connect。
6)进入,点击transmat ->Transmat 选择Uboot的.bin 文件,顺序不能错,顺序为下图由下到上传送:1.先传送USB Installer_DDR2.bin2.再传送u-boot-dnw.bin 在倒计时结束之前快速点击回车, 输入:dnw 20008000回车3.最后传送u-boot.bin 输入nand erase 0 40000 回车;nand write 20008000 0 40000 回车。
arm的用法 -回复
arm的用法-回复ARM的用法ARM架构(Advanced RISC Machines)是一种基于精简指令集计算机(RISC)的处理器架构,广泛应用于移动设备、嵌入式系统和物联网设备等领域。
ARM架构的广泛使用使得掌握ARM的用法变得至关重要。
本文将一步一步回答关于ARM用法的问题,以帮助读者更好地了解和应用ARM。
1. ARM的基本概念首先,我们需要了解ARM的基本概念。
ARM采用了精简指令集架构,即指令集中的指令数量和种类相对较少。
ARM架构的设计目标是提供高效率的计算能力和低功耗的设计。
ARM处理器具有较小的晶体管数量和较低的功耗要求,因此非常适合嵌入式设备和移动设备等场景。
2. ARM指令集和寄存器ARM指令集包括了一系列特定功能的指令,用于完成不同的计算任务。
ARM指令集可分为三种:ARM指令、Thumb指令和Thumb-2指令。
ARM指令是32位指令,用于高性能计算。
Thumb指令是16位指令,用于更低功耗的计算。
Thumb-2指令集结合了ARM指令和Thumb指令,提供了更好的灵活性和兼容性。
ARM处理器有多个寄存器,用于存储和处理数据。
常见的寄存器包括程序计数器(PC)、堆栈指针(SP)和程序状态寄存器(PSR)。
程序计数器存储下一条将被执行的指令地址。
堆栈指针用于管理函数调用时的参数传递和局部变量存储。
程序状态寄存器用于标志处理器的当前状态,如条件码、中断使能等。
3. ARM汇编语言ARM汇编语言是一种基于ARM指令集的低级语言。
通过编写ARM汇编代码,我们可以直接操作处理器的底层功能和资源。
ARM汇编语言具有紧凑的语法和直观的指令表达,可以通过读取和理解ARM架构手册来学习和使用。
ARM汇编语言使用伪指令(Pseudo-Instruction)来进行宏展开和程序控制。
伪指令是一种不被处理器执行的指令,而是由汇编器解释和处理的。
伪指令可以用于定义数据、变量、标签和宏等。
4. ARM开发工具和环境在使用ARM进行开发时,我们需要选择适当的开发工具和环境。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第11章ARM开发环境ADS 1.2
11.1 ADS 1.2简介
ARM ADS全称为ARM Developer Suite,是ARM公司推出的新一代ARM集成开发工具。
现在ADS的最新版本是1.2,它取代了早期的1.1和1.0,除了可以安装在windows NT4、windows 2000、windows 98和windows95操作系统下,还支持windows ME和windows XP 操作系统。
ADS由命令行开发工具、ARM实时库、GUI开发环境(Code Warrior和AXD)、实用程序和支持软件组成。
有了这些部件,用户就可以为ARM系列的RISC处理器编写和调试自己开发的应用程序了。
下面介绍ADS的各个组成部分。
11.1.1 命令行开发工具
这些工具完成将源代码编译、链接成可执行代码的功能。
ADS提供以下命令行开发工具。
1.armcc
armcc是ARM C编译器。
这个编译器通过Plum Hall C V alidation Suite为ARSI C的一致性测试。
armcc用于将用ANSIC编写的程序编译成32位ARM指令代码。
因为armcc是我们最常用的编译器,下面对其进行详细的介绍。
在命令控制台环境下,输入命令:
armcc-help
《ARM嵌入式系统开发典型模块》免费样章。