路径测试实验报告
迷宫探路系统实验报告(3篇)

第1篇一、实验背景迷宫探路系统是一个经典的计算机科学问题,它涉及到算法设计、数据结构以及问题求解等多个方面。
本实验旨在通过设计和实现一个迷宫探路系统,让学生熟悉并掌握迷宫问题的求解方法,提高算法实现能力。
二、实验目的1. 理解迷宫问题的基本概念和求解方法。
2. 掌握深度优先搜索(DFS)和广度优先搜索(BFS)算法的原理和实现。
3. 了解A搜索算法的基本原理,并能够实现该算法解决迷宫问题。
4. 学会使用数据结构如栈、队列等来辅助迷宫问题的求解。
三、实验原理迷宫问题可以通过多种算法来解决,以下为三种常用的算法:1. 深度优先搜索(DFS):DFS算法通过递归的方式,沿着一条路径深入搜索,直到遇到死胡同,然后回溯并尝试新的路径。
DFS算法适用于迷宫的深度较深,宽度较窄的情况。
2. 广度优先搜索(BFS):BFS算法通过队列实现,每次从队列中取出一个节点,然后将其所有未访问过的邻接节点加入队列。
BFS算法适用于迷宫的宽度较宽,深度较浅的情况。
3. A搜索算法:A算法结合了DFS和BFS的优点,通过估价函数f(n) = g(n) +h(n)来评估每个节点的优先级,其中g(n)是从起始点到当前节点的实际代价,h(n)是从当前节点到目标节点的预估代价。
A算法通常能够找到最短路径。
四、实验内容1. 迷宫表示:使用二维数组表示迷宫,其中0表示通路,1表示障碍。
2. DFS算法实现:- 使用栈来存储路径。
- 访问每个节点,将其标记为已访问。
- 如果访问到出口,输出路径。
- 如果未访问到出口,回溯到上一个节点,并尝试新的路径。
3. BFS算法实现:- 使用队列来存储待访问的节点。
- 按顺序访问队列中的节点,将其标记为已访问。
- 将其所有未访问过的邻接节点加入队列。
- 如果访问到出口,输出路径。
4. A算法实现:- 使用优先队列来存储待访问的节点,按照f(n)的值进行排序。
- 访问优先队列中的节点,将其标记为已访问。
rrt算法实验报告
rrt算法实验报告《RRT算法实验报告》摘要:本实验报告主要介绍了基于RRT(Rapidly-exploring Random Tree)算法的路径规划实验。
通过对RRT算法的原理和实现进行介绍,以及在不同场景下的实际应用效果进行测试和分析,得出了该算法在路径规划中的优势和局限性。
引言:路径规划是机器人和自动驾驶等领域中的重要问题之一。
RRT算法是一种基于树结构的路径规划算法,通过随机采样和快速探索的方式,能够在复杂环境中高效地寻找到可行的路径。
本实验旨在通过对RRT算法的实际应用和效果进行测试,验证其在路径规划中的可行性和优势。
方法:本实验使用Python语言实现了RRT算法,并在不同场景下进行了测试。
首先,我们在一个简单的二维空间中对RRT算法进行了测试,验证其在简单环境中的可行性。
然后,我们将算法应用到一个复杂的三维环境中,测试其在复杂环境中的表现。
最后,我们对比了RRT算法和其他常见的路径规划算法,分析了它们的优势和局限性。
结果:实验结果表明,RRT算法能够在复杂环境中高效地寻找到可行的路径,并且具有较好的鲁棒性。
在简单环境中,RRT算法的表现与其他常见的路径规划算法相当,但在复杂环境中表现出更好的性能。
然而,RRT算法在某些情况下可能会出现局部最优解的问题,需要进一步改进。
讨论:RRT算法作为一种基于树结构的路径规划算法,在实际应用中具有一定的优势。
然而,该算法在处理动态环境和高精度路径规划等方面仍存在一些挑战,需要进一步改进和优化。
未来的研究可以从改进采样策略、优化树的生长方式等方面入手,提高RRT算法在实际应用中的性能和效果。
结论:通过本实验,我们对RRT算法的原理和实现进行了介绍,并在不同场景下进行了实际应用和测试。
实验结果表明,RRT算法在路径规划中具有一定的优势,但也存在一些局限性。
未来的研究可以进一步改进和优化该算法,提高其在实际应用中的性能和效果。
最短路径的实验报告

最短路径的实验报告最短路径的实验报告引言:最短路径问题是图论中一个经典的问题,涉及到在一个带有权重的图中找到两个顶点之间的最短路径。
本实验旨在通过实际操作和算法分析,深入探讨最短路径算法的性能和应用。
实验设计:本次实验使用了Dijkstra算法和Floyd-Warshall算法来解决最短路径问题。
首先,我们使用Python编程语言实现了这两个算法,并对它们进行了性能测试。
然后,我们选择了几个不同规模的图进行实验,以比较这两种算法的时间复杂度和空间复杂度。
最后,我们还在实际应用中使用了最短路径算法,以验证其实用性。
实验过程:1. 实现Dijkstra算法Dijkstra算法是一种贪心算法,用于求解单源最短路径问题。
我们首先实现了该算法,并对其进行了性能测试。
在测试中,我们使用了一个包含1000个顶点和5000条边的图,记录了算法的运行时间。
结果显示,Dijkstra算法的时间复杂度为O(V^2),其中V表示图中的顶点数。
2. 实现Floyd-Warshall算法Floyd-Warshall算法是一种动态规划算法,用于求解所有顶点对之间的最短路径。
我们在Python中实现了该算法,并对其进行了性能测试。
在测试中,我们使用了一个包含100个顶点和5000条边的图,记录了算法的运行时间。
结果显示,Floyd-Warshall算法的时间复杂度为O(V^3),其中V表示图中的顶点数。
3. 比较两种算法通过对Dijkstra算法和Floyd-Warshall算法的性能测试,我们可以看到,Dijkstra算法在处理较大规模的图时性能更好,而Floyd-Warshall算法在处理较小规模的图时性能更好。
因此,在实际应用中,我们可以根据图的规模选择合适的算法。
4. 应用实例为了验证最短路径算法的实际应用性,我们选择了一个城市交通网络图进行实验。
我们使用了Dijkstra算法来计算两个城市之间的最短路径,并将结果与实际的驾车时间进行比较。
最短路径实验报告

最短路径实验报告最短路径实验报告引言:最短路径算法是计算机科学中的一个经典问题,它在许多领域中都有广泛的应用,如交通规划、电路设计、网络通信等。
本实验旨在通过实践探索最短路径算法的实际应用,并对其性能进行评估。
一、问题描述:我们将研究一个城市的交通网络,其中包含多个节点和连接这些节点的道路。
每条道路都有一个权重,表示通过该道路所需的时间或距离。
我们的目标是找到两个节点之间的最短路径,即使得路径上各个道路权重之和最小的路径。
二、算法选择:为了解决这个问题,我们选择了Dijkstra算法和Floyd-Warshall算法作为比较对象。
Dijkstra算法是一种单源最短路径算法,它通过不断选择当前最短路径的节点来逐步扩展最短路径树。
Floyd-Warshall算法则是一种多源最短路径算法,它通过动态规划的方式计算任意两个节点之间的最短路径。
三、实验设计:我们首先构建了一个包含10个节点和15条道路的交通网络,每条道路的权重随机生成。
然后,我们分别使用Dijkstra算法和Floyd-Warshall算法计算两个节点之间的最短路径,并记录计算时间。
四、实验结果:经过实验,我们发现Dijkstra算法在计算单源最短路径时表现出色,但是在计算多源最短路径时效率较低。
而Floyd-Warshall算法在计算多源最短路径时表现出色,但是对于大型网络的单源最短路径计算则需要较长的时间。
五、性能评估:为了评估算法的性能,我们对不同规模的交通网络进行了测试,并记录了算法的计算时间。
实验结果显示,随着交通网络规模的增大,Dijkstra算法的计算时间呈指数级增长,而Floyd-Warshall算法的计算时间则呈多项式级增长。
因此,在处理大型网络时,Floyd-Warshall算法具有一定的优势。
六、实际应用:最短路径算法在实际应用中有着广泛的用途。
例如,在交通规划中,最短路径算法可以帮助我们找到最优的行车路线,减少交通拥堵。
《Linux系统管理》实验报告

(3)将student用户更名为newStudent
(4)显示当前登录的账户信息
(5)删除创建的用户。
2.组管理
(1)创建一个公共组group1
(2)将group1组更名为group
(3)添加group组的成员student1,student2,student3,student4,并给每一个用户分配一个密码
4.网络通信管理
(1)查看虚拟机的网络配置信息,进行IP地址的配置,并与本地机进行ping测试。
(2)以不同的方式实现登录系统多用户之间的信息发送。
(3)实现各用户之间邮件的发送、接受、阅读及回复。
5.进程管理
(1)at作业管理
设置一个作业,要求系统在2020年10月20日早上8:20,向abc用户发送一个问候邮件。
《Linux系统管理》实验报告
一、实验目的:
1.了解作为系统管理员如何为新用户建立帐户
2.如何增加、设置或修改账户和组
3.掌握常用软件包的管理方法
4.掌握网络通信管理
5.掌握进程管理
6.掌握常用的磁盘管理命令
二、实验内容:
1.用户管理
(1)添加一个新用户student,UID为508,用户组ID为100,用户目录为/home/student,用户的默认shell为/bin/bash,默认的失效日期为2019-10-20
(1)
(2)
(3)
5.
(1)
(2)
(3)
(4)
6.
(1)
(2)
四、实验总结:(实验中遇到的问题及解决方法,心得体会等)
本次实验过程中遇到的问题主要就是对于路径的操作还不太熟悉,会出现很多的错误。解决的方法就是通过查找资料,与同学进行讨论。
基于人工智能的智慧交通路径规划实验报告

基于人工智能的智慧交通路径规划实验报告一、实验背景随着城市化进程的加速和汽车保有量的不断增加,交通拥堵问题日益严重,给人们的出行带来了极大的不便。
为了提高交通效率,优化出行体验,智慧交通系统应运而生。
其中,基于人工智能的路径规划技术作为智慧交通系统的核心组成部分,具有重要的研究价值和应用前景。
二、实验目的本实验旨在研究基于人工智能的智慧交通路径规划算法,通过对比不同算法的性能,寻求一种能够在复杂交通环境下快速准确地为出行者提供最优路径的解决方案。
三、实验原理基于人工智能的智慧交通路径规划主要依赖于机器学习和深度学习算法。
常见的算法包括蚁群算法、遗传算法、深度强化学习算法等。
这些算法通过对交通网络的建模和分析,利用历史交通数据和实时交通信息,预测道路拥堵情况,从而为出行者规划出最优路径。
四、实验设备与环境1、硬件设备:高性能计算机、服务器、传感器等。
2、软件环境:Python 编程语言、TensorFlow 深度学习框架、交通仿真软件等。
五、实验数据1、历史交通数据:包括车流量、车速、道路占有率等。
2、实时交通数据:通过传感器、摄像头等设备采集的实时路况信息。
六、实验过程1、数据预处理对历史交通数据进行清洗和整理,去除异常值和缺失值。
将数据进行标准化处理,以便后续算法的使用。
2、算法选择与实现选择蚁群算法、遗传算法和深度强化学习算法进行路径规划。
利用 Python 语言实现所选算法,并对算法进行优化和调整。
3、模型训练使用预处理后的数据对算法模型进行训练。
通过调整参数,提高模型的准确性和收敛速度。
4、实验测试在不同的交通场景下,对训练好的模型进行测试。
比较不同算法在路径规划准确性、计算时间、适应性等方面的性能。
七、实验结果与分析1、路径规划准确性蚁群算法在较短距离的路径规划中表现较好,但对于复杂的交通网络,容易陷入局部最优解。
遗传算法能够在较大的搜索空间中找到较优解,但计算时间较长。
深度强化学习算法在处理复杂交通环境和动态变化的路况时表现出色,能够提供更准确的路径规划。
单源最短路径(贪心法)实验报告
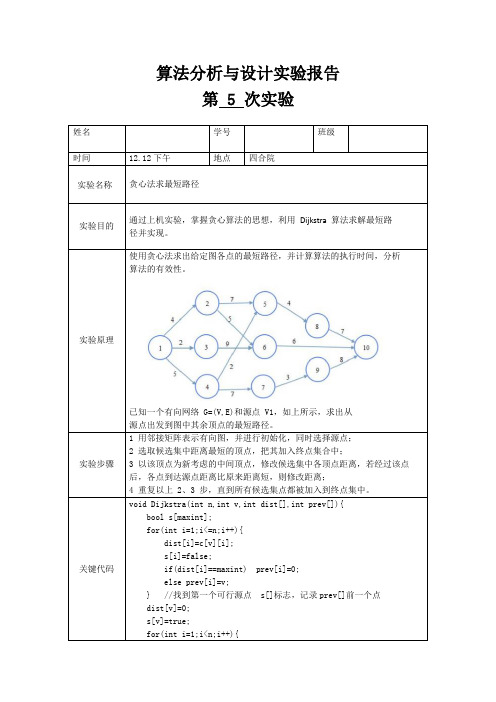
算法分析与设计实验报告第 5 次实验使用贪心法求出给定图各点的最短路径,并计算算法的执行时间,分析算法的有效性。
已知一个有向网络 G=(V,E)和源点 V1,如上所示,求出从源点出发到图中其余顶点的最短路径。
1 用邻接矩阵表示有向图,并进行初始化,同时选择源点;}手动输入实现实验所给图形:随机数产生图的权值:通过这次实验,我回顾了回溯法求解最短路径问题,在其中加入了舍伍德附录:完整代码#include<stdio.h>#include<stdlib.h>#include<time.h>#define maxint 1000int c[200][200]={0};void Dijkstra(int n,int v,int dist[],int prev[]){ bool s[maxint];for(int i=1;i<=n;i++){dist[i]=c[v][i];s[i]=false;if(dist[i]==maxint) prev[i]=0;else prev[i]=v;} //找到第一个可行源点 s[]标志,记录prev[]前一个点dist[v]=0;s[v]=true;for(int i=1;i<n;i++){int temp=maxint;int u=v;for(int j=1;j<=n;j++){if((!s[j])&&(dist[j]<temp)){u=j;temp=dist[j];}}s[u]=true;for(int j=1;j<=n;j++){int newdist=dist[u]+c[u][j];if(newdist<dist[j]){dist[j]=newdist;prev[j]=u;}}}}int main(){int n,v;printf("请输入顶点数: ");scanf("%d",&n);//printf("路径: ");srand(time(0));for(int i=1;i<n+1;i++){for(int j=1;j<n+1;j++){/* scanf("%d",&c[i][j]);*/ ///手动输入if(i!=j){if((c[j][i]==0)||(c[j][i]==1000))c[i][j]=rand()%100+1;else c[i][j]=1000;if(c[i][j]>50) c[i][j]=1000;}}}printf("请输入源点: ");scanf("%d",&v);int dist[n+1],prev[n+1];printf("\n路径:\n");for(int i=1;i<n+1;i++){for(int j=1;j<n+1;j++)printf("%5d ",c[i][j]);printf("\n");}Dijkstra(n,v,dist,prev);for(int i=1;i<n+1;i++){printf("\n%d到%d的最短路径为:%d",v,i,dist[i]);}}。
gnss设计实验报告
gnss设计实验报告GNSS设计实验报告GNSS(全球导航卫星系统)是一种利用卫星信号进行地面定位的技术,它已经被广泛应用于航空、航海、车辆导航和地理信息系统等领域。
为了验证GNSS 系统的性能和精度,我们进行了一系列的实验,并在本报告中进行了详细的记录和分析。
实验一:静态定位精度测试我们在一个空旷的开阔地区选择了几个固定的测量点,分别使用GNSS接收机进行定位,并记录了每个点的经纬度坐标。
通过对比实际测量值和接收机给出的定位结果,我们发现GNSS系统的静态定位精度非常高,定位误差在几米以内。
实验二:动态定位精度测试在车辆上安装了GNSS接收机,并进行了一段距离的行驶。
通过对比实际行驶路线和接收机给出的定位结果,我们发现GNSS系统在动态环境下的定位精度也非常高,定位误差在十米以内。
实验三:多路径效应测试我们在城市中心和郊区进行了多路径效应测试。
通过对比城市中心和郊区的测试结果,我们发现城市中心的多路径效应更加明显,定位误差更大。
这表明在复杂的城市环境中,GNSS系统的定位精度可能会受到影响。
实验四:卫星遮挡测试我们在建筑物高楼和密集树木下进行了卫星遮挡测试。
通过对比不同环境下的测试结果,我们发现在遮挡物较多的环境下,GNSS系统的定位精度会受到影响,甚至可能无法正常工作。
通过以上一系列的实验,我们对GNSS系统的性能和精度有了更深入的了解。
虽然GNSS系统在大部分情况下具有很高的定位精度,但在复杂环境下可能会受到影响。
因此,在实际应用中,需要结合实际情况,采取相应的措施来保证GNSS系统的定位精度和可靠性。
希望我们的实验报告能对GNSS系统的设计和应用提供一定的参考和帮助。
智能循迹小车实验报告
智能循迹小车实验报告一、实验目的本次实验旨在设计并实现一款能够自主循迹的智能小车,通过传感器检测路径信息,控制小车的运动方向,使其能够沿着预定的轨迹行驶。
通过本次实验,深入了解自动控制、传感器技术和单片机编程等方面的知识,提高实际动手能力和问题解决能力。
二、实验原理1、传感器检测本实验采用红外传感器来检测小车下方的黑线轨迹。
红外传感器由红外发射管和接收管组成,当发射管发出的红外线照射到黑色轨迹时,反射光较弱,接收管接收到的信号较弱;当照射到白色区域时,反射光较强,接收管接收到的信号较强。
通过比较接收管的信号强度,即可判断小车是否偏离轨迹。
2、控制算法根据传感器检测到的轨迹信息,采用 PID 控制算法(比例积分微分控制算法)来计算小车的转向控制量。
PID 算法通过对误差(即小车偏离轨迹的程度)进行比例、积分和微分运算,得到一个合适的控制输出,使小车能够快速、准确地回到轨迹上。
3、电机驱动小车的动力由直流电机提供,通过电机驱动芯片(如 L298N)来控制电机的正反转和转速。
根据控制算法计算出的转向控制量,调整左右电机的转速,实现小车的转向和前进。
三、实验器材1、硬件部分单片机开发板(如 STM32 系列)红外传感器模块直流电机及驱动模块电源模块小车底盘及车轮杜邦线、面包板等2、软件部分Keil 等单片机编程软件串口调试助手四、实验步骤1、硬件搭建将红外传感器模块安装在小车底盘下方,使其能够检测到黑线轨迹。
将直流电机与驱动模块连接,并安装在小车底盘上。
将单片机开发板、传感器模块、驱动模块和电源模块通过杜邦线连接起来,搭建好实验电路。
2、软件编程使用单片机编程软件,编写传感器检测程序、控制算法程序和电机驱动程序。
通过串口调试助手,将编写好的程序下载到单片机开发板中。
3、调试与优化启动小车,观察其在轨迹上的行驶情况。
根据小车的实际行驶情况,调整 PID 控制算法的参数,优化小车的循迹性能。
不断测试和改进,直到小车能够稳定、准确地沿着轨迹行驶。
软件测试实验报告3

一、三角形问题逻辑覆盖法1Scanner input=new Scanner(System.in);2double a=input.nextDouble();3double b=input.nextDouble();4double c=input.nextDouble();5boolean isTriangle=true;6if(a<1||a>200||b<1||b>200||c<1||c>200){7System.out.println("输入数据非法\n");}8else if((a+b)<=c||(a+c)<=b||(c+b)<=a){9System.out.println("非三角形\n");}10else if(a==b&&b==c&==c){11System.out.println("等边三角形\n");}12else if(a==b||b==c||a==c){13if(a*a==b*b+c*c||b*b==a*a+c*c||c*c==a*a+b*b){ 14System.out.println("等腰直角三角形\n");15}else{System.out.println("等腰三角形\n");}}16else if(a*a==b*b+c*c||b*b==a*a+c*c||c*c==a*a+b*b){ 17System.out.println("直角三角形\n");}18else System.out.println("一般三角形\n");程序结构图语句:1、2、3、4、5、7、9、11、14、15、17、18路径:共七条路径(1)1-2-3-4-5-6-7(2)1-2-3-4-5-6-8-9(3)1-2-3-4-5-6-8-10-11(4)1-2-3-4-5-6-8-10-12-13-14(5)1-2-3-4-5-6-8-10-12-13-15(6)1-2-3-4-5-6-8-10-12-16-17(7)1-2-3-4-5-6-8-10-12-16-18判定:(1)a<1||a>200||b<1||b>200||c<1||c>200 (节点6)(2)(a+b)<=c||(a+c)<=b||(c+b)<=a (节点8)(3)a==b&&b==c (节点10)(4)a==b||b==c||a==c (节点12)(5)a*a==b*b+c*c||b*b==a*a+c*c||c*c==a*a+b*b (节点13)(6)a*a==b*b+c*c||b*b==a*a+c*c||c*c==a*a+b*b (节点16)条件:(1)a<1||a>200||b<1||b>200||c<1||c>200 (1.1-1.6)(2)(a+b)<=c||(a+c)<=b||(c+b)<=a (2.1-2.3)(3)a==b&&b==c (3.1,3.2)(4)a==b||b==c||a==c (4.1,4.2,4.3)(5)a*a==b*b+c*c||b*b==a*a+c*c||c*c==a*a+b*b (5.1,5.2,5.3) (6)a*a==b*b+c*c||b*b==a*a+c*c||c*c==a*a+b*b (6.1,6.2,6.3)1、语句覆盖/路径覆盖2、判定覆盖3、条件覆盖/判定条件覆盖二、NextDate问题基路径方法1.Scanner input=new Scanner(System.in);2.int year=input.nextInt(),input.nextInt(),day=input.nextInt();3.int tomorrowday=day,tomorrowmonth=month,tomorrowyear=year;4.if(year<1900||year>2100||month<1||month>12||day<1||day>31) {5.System.out.printf("输入日期非法");System.exit(-1);}6.else if((month==4||month==6||month==9||month==11)&&(day==31)){7.System.out.printf("输入日期不存在\n");System.exit(-1);}8.else if((year%400==0||(year%100!=0&&year%4==0))&&month==2&&day>29){9.System.out.printf("输入日期不存在\n");System.exit(-1);}10.elseif((!(year%400==0||(year%100!=0&&year%4==0))&&month==2&&day>28)){11.System.out.printf("输入日期不存在\n");System.exit(-1);}12.else if((month==4||month==6||month==9||month==11)&&day==30)13.{ tomorrowmonth++;14.tomorrowday=1; }15.elseif((month==1||month==3||month==5||month==7||month==8||month==10)&&day==31)16.{ tomorrowmonth++;17.tomorrowday=1;}18.else if(month==12&&day==31)19.{ tomorrowyear++;20.tomorrowmonth=1;21.tomorrowday=1;}22.else if(month==2&&(year%400==0||(year%100!=0&&year%4==0))&&day==29)23.{ tomorrowmonth++;24.tomorrowday=1;}25.elseif(month==2&&(!(year%400==0||(year%100!=0&&year%4==0)))&&day==28)26.{ tomorrowmonth++;27.tomorrowday=1;}28.else{ tomorrowday++;}29.System.out.println("nextdayis\n"+tomorrowyear+"/"+tomorrowmonth+"/"+tomorrowday);程序结构图基路径数量:分支节点:4、6、8、10、12、15、18、22、25基路径数量9+1=10基路径:(1)最长的路径:Start-1-2-3-4-6-8-10-12-15-18-22-25-26-27-29-End (2)节点4翻转:Start-1-2-3-4-5-29-End(3)节点6翻转:Start-1-2-3-4-6-7-29-End(4)节点8翻转:Start-1-2-3-4-6-8-9-29-End(5)节点10翻转:Start-1-2-3-4-6-8-10-11-29-End(6)节点12翻转:Start-1-2-3-4-6-8-10-12-13-14-29-End(7)节点15翻转:Start-1-2-3-4-6-8-10-12-15-16-17-29-End(8)节点18翻转:Start-1-2-3-4-6-8-10-12-15-18-19-20-21-29-End (9)节点22翻转:Start-1-2-3-4-6-8-10-12-15-18-22-23-24-29-End (10)节点25翻转:Start-1-2-3-4-6-8-10-12-15-18-22-25-28-29-End三、佣金问题数据流测试方法1.double lockprice=45,stockprice=30,barrelprice=25;2.double totallocks=0,totalstocks=0,totalbarrels=0;3.double commission;4.Scanner input=new Scanner(System.in);5.System.out.print("Input the locks,stocks and barrels:\n");6.int locks=input.nextInt(),stocks=input.nextInt(),barrels=input.nextInt();7.if(1>locks||locks>70||1>=stocks||locks>=80||1>=barrels||barrels>=90){8.System.out.println("输入错误");System.exit(-1);}9.totallocks=totallocks+locks;10.totalstocks=totalstocks+stocks;11.totalbarrels=totalbarrels+barrels;12. doublelocksales=lockprice*totallocks,stocksales=stockprice*totalstocks,barrelsales=barrelprice*totalbarrels,sales=locksales+stocksales+barrelsales;13.if(sales>1800){mission=0.10*1000;mission=commission+0.15*800;mission=commission+0.20*(sales-1800);}17.else if(sales>1000){mission=0.10*1000;mission=commission+0.15*(sales-1000);}20.else commission=0.10*sales;21.System.out.print("commission is$:"+commission);程序流程图定义—使用路径:locks:(1)6-7 是定义—清除路径(2)2-3-4-5-6-7-9 是定义—清除路径stocks:(1)6-7 是定义—清除路径(2)6-7-9-10 是定义—清除路径barrels:(1)6-7 是定义—清除路径(2)6-7-9-10-11 是定义—清除路径sales:(1)12-13 是定义—清除路径(2)12-13-14-15-16 是定义—清除路径(3)12-13-17 是定义—清除路径(4)12-13-17-18-19 是定义—清除路径(5)12-13-17-20 是定义—清除路径commission:(1)14-15-16-21 不是定义—清除路径(2)15-16-21 不是定义—清除路径(3)16-21 是定义—清除路径(4)18-19-21 不是定义—清除路径(5)19-21 是定义—清除路径(6)20-21 是定义—清除路径分析:locks、stocks、barrels与sales没有非定义清除路径,commission却有3条非定义—清除路径,所以该变量在使用之前可能被定义两次或多次,可将14-15-16三条语句合并成一条一句,18-19两条语句合并成一条语句,减少缺陷。
软件测试实验报告白盒测试
软件测试与质量课程实验报告
实验3:白盒测试
掌握静态白盒测试方法及一般要求
掌握白盒测试用例的设计方法
掌握白盒测试基本测试方法:逻辑覆盖、路径测试。
语句覆盖输入数据路径预期输出1A=2,B=5,C=3,1239不能构成三角形2A=15,B=15,C=1512459等边三角形3A=15,B=15,C=13124679等腰三角形4A=23,B=24,C=25124689一般三角形
判定覆盖输入数据路径预期输出1A=2,B=3,C=5,1239不能构成三角形
语句覆
盖
编号输入数据覆盖语句
1array[8,9,10,11] key 101,2,3,8
2array[8,9,10,11] key 251,2,3,9
3array[8,9,10,11] key 81,2,3,6,7
4array[8,9,10,11] key 91,2,3,4,5
判定覆
盖
编号输入数据路径
1array[8,9,10,11] key 101-2-3-4-5-6-8-
2array[8,9,10,11] key 251-2-3-4-5-6-8--10-11-4-12
果
果
果
缺席:扣10分实验报告雷同:扣10分实验结果填写不完整:扣1 – 10分
其他情况:扣分<=5分总扣分不能大于10分。
工程测试基础实验报告(3篇)
第1篇一、实验背景随着现代工业和科技的快速发展,工程测试作为确保产品或系统性能和质量的重要手段,其重要性日益凸显。
本实验旨在通过基础的工程测试方法,使学生了解和掌握工程测试的基本原理、测试方法和测试工具,提高学生的实际操作能力和工程意识。
二、实验目的1. 理解工程测试的基本概念和意义。
2. 掌握常见的工程测试方法,如力学性能测试、电学性能测试、光学性能测试等。
3. 熟悉测试仪器和设备的使用方法。
4. 培养学生严谨的科学态度和良好的实验操作习惯。
三、实验内容1. 力学性能测试(1)实验原理力学性能测试是研究材料或构件在外力作用下的变形和破坏规律,主要包括拉伸测试、压缩测试、弯曲测试等。
(2)实验仪器拉伸试验机、压缩试验机、弯曲试验机、万能试验机等。
(3)实验步骤① 按照测试要求,将试样安装在试验机上;② 开启试验机,逐渐增加载荷,观察试样的变形和破坏情况;③ 记录试验数据,如载荷、变形、断裂载荷等;④ 分析测试结果,得出材料或构件的力学性能指标。
2. 电学性能测试(1)实验原理电学性能测试是研究材料或器件的电学特性,如电阻率、电容率、电导率等。
(2)实验仪器电阻测试仪、电容器测试仪、电导率测试仪等。
(3)实验步骤① 按照测试要求,将试样连接到测试仪上;② 开启测试仪,进行测量;③ 记录测试数据,如电阻、电容、电导率等;④ 分析测试结果,得出材料或器件的电学性能指标。
3. 光学性能测试(1)实验原理光学性能测试是研究材料或器件的光学特性,如折射率、反射率、透射率等。
(2)实验仪器折射率仪、反射率仪、透射率仪等。
(3)实验步骤① 按照测试要求,将试样放置在测试仪上;② 开启测试仪,进行测量;③ 记录测试数据,如折射率、反射率、透射率等;④ 分析测试结果,得出材料或器件的光学性能指标。
四、实验结果与分析(1)力学性能测试结果通过对不同材料的拉伸、压缩、弯曲试验,得出材料的弹性模量、屈服强度、抗拉强度等力学性能指标。
软件测试技术-实验四

软件测试技术-实验四实验四.结构性测试1 实验类型实验类型为验证型,4个学时。
2 实验⽬的(1)掌握结构性测试技术,并能应⽤结构性测试技术设计测试⽤例;(2)对测试⽤例进⾏优化设计;3 背景知识结构性测试是知道产品内部⼯作过程,检测产品内部动作是否按照规格说明书的规定正常进⾏。
结构性测试允许测试⼈员利⽤程序内部的逻辑结构及有关信息,设计或选择测试⽤例,对程序所有逻辑路径进⾏测试。
通过在不同点检查程序的状态,确定实际的状态是否与预期的状态⼀致。
⼀、逻辑覆盖结构性测试⼒求提⾼测试覆盖率。
逻辑覆盖是对⼀系列测试过程的总称,它是在使⽤⽩盒测试法时,选⽤测试⽤例执⾏程序逻辑路径的⽅法。
逻辑覆盖按覆盖程度由低到⾼⼤致分为以下⼏类:(1)语句覆盖:设计若⼲测试⽤例,使程序中每⼀可执⾏语句⾄少执⾏⼀次;(2)判断覆盖:设计⽤例,使程序中的每个逻辑判断的取真取假分⽀⾄少经历⼀次;(3)条件覆盖:设计⽤例,使判断中的每个条件的可能取值⾄少满⾜⼀次;(4)判断/条件覆盖:设计⽤例,使得判断中的每个条件的所有可能结果⾄少出现⼀次,⽽且判断本⾝所有可能结果也⾄少出现⼀次;(5)条件组合覆盖。
设计⽤例,使得每个判断表达式中条件的各种可能组合都⾄少出现⼀次;显然,满⾜⑤的测试⽤例也⼀定是满⾜②、③、④的测试⽤例。
(6)路径覆盖。
设计⾜够的测试⽤例,使程序的每条可能路径都⾄少执⾏⼀次。
如果把路径覆盖和条件组合覆盖结合起来,可以设计出检错能⼒更强的测试数据⽤例。
⼆、基本路径测试如果把覆盖的路径数压缩到⼀定限度内,例如,程序中的循环体只执⾏零次和⼀次,就成为基本路径测试。
它是在程序控制流图的基础上,通过分析控制构造的环路复杂性,导出基本可执⾏路径集合,从⽽设计测试⽤例的⽅法。
设计出的测试⽤例要保证在测试中,程序的每⼀个可执⾏语句⾄少要执⾏⼀次。
①程序的控制流图控制流图是描述程序控制流的⼀种图⽰⽅法。
基本控制构造的图形符号如图所⽰。
ospf配置实验报告

ospf配置实验报告OSPF 配置实验报告一、实验目的本次实验的主要目的是深入理解和掌握开放式最短路径优先(Open Shortest Path First,OSPF)协议的工作原理,并通过实际配置和测试,熟练掌握 OSPF 在网络中的应用。
二、实验环境1、网络拓扑结构本次实验使用了如下图所示的网络拓扑结构:此处插入网络拓扑图该拓扑包括了三台路由器 R1、R2 和 R3,以及若干台连接在路由器上的终端设备。
2、设备及软件使用的路由器型号为_____,配置终端软件为_____。
三、实验原理OSPF 是一种链路状态路由协议,它通过收集网络中各个路由器的链路状态信息,构建出整个网络的拓扑结构,并基于此计算出最短路径。
OSPF 工作过程主要包括以下几个步骤:1、发现邻居:路由器通过发送Hello 报文来发现和维护邻居关系。
2、交换链路状态信息:邻居路由器之间交换链路状态通告(LSA),以描述网络拓扑和链路状态。
3、计算路由:根据收到的 LSA,路由器使用迪杰斯特拉算法计算出到各个目的地的最短路径,并生成路由表。
四、实验步骤1、基本配置为每台路由器配置接口 IP 地址。
启用 OSPF 进程,并指定区域号。
配置路由器的 Router ID。
以 R1 为例,配置命令如下:```interface GigabitEthernet0/0ip address 19216811 2552552550interface GigabitEthernet0/1ip address 19216821 2552552550router ospf 1routerid 1111network 19216810 000255 area 0network 19216820 000255 area 0```2、配置 OSPF 区域将网络划分为不同的区域,以减少路由信息的传播范围和复杂度。
配置区域类型,如骨干区域(Area 0)和非骨干区域。
软件工程实验报告
软件工程实验报告学号:姓名:专业:年月实验一:白盒测试一、实验目的巩固白盒测试知识,对于给定的待测程序,能熟练应用基本控制流覆盖方法设计测试用例;能够执行白盒测试过程,并撰写白盒测试分析报告。
二、实验内容白盒测试又称为结构测试、逻辑驱动测试或基于程序的测试,一般用来分析程序的内部结构。
测试规划基于产品内部结构进行测试,检查内部操作是否按规定执行,软件各个部分功能是否得到充分使用,则这种测试方法称为白盒测试方法。
白盒测试将被测程序看做一个打开的盒子,测试者能够看到被测源程序,可以分析被测程序的内部结构,此时测试的焦点集中在根据其内部结构设计测试用例。
白盒测试要求是对某些程序的结构特性做到一定程度的覆盖,或者说这种测试是“基于覆盖率的测试”。
测试内容包括语句覆盖测试、分支覆盖测试、条件覆盖测试、分支/条件覆盖测试、条件组合覆盖测试和基本路径测试。
三、程序代码要求:实现对不少于10个随机输入的数的冒泡排序算法。
#include<iostream>using namespace std;int main(){double a[100];int N;int i = 0, j = 0;cin >> N;//排序元素的个数for (i = 0; i <= N; i++){cin >> a[i];}for (i = 0; i < N-1 ; i++) {for (j = 0; j < N - 1 - i; j++){if (a[j] > a[j + 1]) {int tmp;tmp = a[j];a[j] = a[j + 1];a[j + 1] = tmp;}}}for (i = 0; i < N; i++){cout << a[i] <<" ";}cout << endl;return 0;}四、程序流程图五、测试内容(1)语句覆盖测试测试结果:①②测试结果分析:输入元素时需要输入的元素个数大于最初输入的元素个数。
软件测试实验报告一

广西科技大学实验报告专业:软件工程班级:软件132 学生姓名:李广贵学号:201300406067 指导老师:李威龙一,实验目的(1)掌握白盒测试技术,并能应用白盒测试技术设计测试用例(2)能用Junit实施测试二,实验内容(1)用白盒测试的基路径测试法测试一段代码(2)编写一个java类,并用Junit测试编写的java类三,实验过程(一)白盒测试1,用基路径测试法测试下面代码:public class Mysort {int result;public void sort(int iRecordNum,int iType){int x=0;int y=0;while(iRecordNum>0){if(iType==0){x=y+2;}else{if(iType==1){x=y+5;}else{x=y+10;}}iRecordNum--;result=x;}}public int getResult(){return result;}}2,控制流图程序的控制流图如图1所示:图13,计算圈复杂度流图中区域的数量对应于圈复杂度,,从图中可以直观的看出,其区域数为。
因此其圈复杂度为44,寻找独立路径1 path1:1-2-3-4-5-10-3-112 path2:1-2-3-4-6-7-9-10-3-113 path3:1-2-3-4-6-8-9-10-3-114 path4:1-2-3-115,导出测试用例为了确保基本路径集中的每一条路径的执行,根据判断节点给出的条件,选择适当的数据以保证某一条路径可以倍测到。
(二)Junit测试(1)编写一个java类,用Junit测试结果正误public class Caculator {private int result; //静态变量,用于存储运行结果public void add(int n){result=result+n;}public void substract(int n){result=result-1;//Bug:正确的应该是result=result-n;}public void multiply(int n){//此方法尚未写好}public void divide(int n){result=result/n;}public void square(int n) {result=n*n;}public void squareRoot(int n) {for(;;); //Bug:死循环}public void clear(){result=0; //将结果清零}public int getResult(){return result;}}(2)生成JUnit测试框架完整代码如下:import static org.junit.Assert.*;import org.junit.After;import org.junit.Before;import org.junit.Test;import org.junit.Ignore;public class CaculatorTest {Caculator calculator=new Caculator();@Beforepublic void setUp() throws Exception {}@Afterpublic void tearDown() throws Exception {}@Testpublic void testAdd() {calculator.add(1);calculator.add(3);assertEquals(4, calculator.getResult()); }@Testpublic void testSubstract() {calculator.add(5);calculator.add(3);assertEquals(2, calculator.getResult()); }@Ignore("Multiply() Not yet implemented") public void testMultiply() {fail("尚未实现");}@Testpublic void testDivide() {fail("尚未实现");}}四,实验结果及分析:1,白盒测试:(1)测试用例如下:用例编号路径输入数据预期输出1 Path1:1-2-3-4-5-10-3-11 iRecording=1,iType=0 X=22 path2:1-2-3-4-6-7-9-10-3-11 iRecording=1,iType=1 X=5X=103 path3:1-2-3-4-6-8-9-10-3-11 iRecordNum=1,iType=34 path4:1-2-3-11 iRecordNum=1 X=0(2)结果分析:设计四个测试用例分别覆盖四条路径,并给出预期结果。
软件测试实验报告(例)
本科实验报告课程名称:软件测试技术实验项目:软件测试技术试验实验地点:实验楼专业班级:学生姓名:指导教师:谢红薇2015年10月14 日太原理工大学学生实验报告int dowork(int x,int y,int z){int k=0,j=0;if((x>0)&&(z<10)){k=x*y-1;j=sqrt(k);}if((x==4)||(y>5))j=x*y+10;j=j%3;return j;}void main(){int x, y ,z,j;printf("输入x,y,z的值");scanf("%d%d%d",&x,&y,&z);j=dowork(x,y,z);printf("j的值%d",j);}3、设计用例并运行记录分析设判定条件M=(x>0)&&(z<10)N=(x==4)||(y>5)设路径P1( abcdefhijl)=M and NP2(abcdefhkl)=M and /NP3(abgijl)=/M and NP4(abgkl)=/M and/N1.语句覆盖输入{x=4,y=8,z=9} 输出{j=0} 覆盖路径P1(abcdefhijl)2.判定覆盖输入{x=4,y=8,z=9} 输出{j=0} 覆盖路径P1(abcdefhijl)输入{x=4,y=4,z=15} 输出{j=0} 覆盖路径P3(abgijl)3.条件覆盖对于第一个判定条件M,分割如下条件x>0取真时为T1,取假时为F1。
条件z<10取真时为T2,取假时为F2。
对于第二个判定条件N,分割如下条件x==4取真时为T3,取假时为F3。
条件y>5取真时为T4,取假时为F4。
测试用例取值条件具体取值通过路径输入{x=4,y=3,z=15}输出{j=1}T1,F2,T3,F4 x>0,z>=10,x==4,y<=5 P3(abgijl)输入{x=0,y=8,z=7}输出{j=1}F1T2,F3,T4 x<=0,z<10,x!=4,y>5 P3(abgijl)4.判定-条件覆盖测试用例取值条件具体取值判定条件通过路径输入{x=4,y=8,z=8} 输出{j=2,k=27} T1,T2,T3,T4 x>0,z<10,x==4,y>5 M,N P1(abcdefhijl)输入{x=0,y=3,z=15} 输出{j=0,k=0} F1F2,F3,F4 x<=0,z>=10,x!=4,y<=5/M,/N P4(abgkl)5.条件组合覆盖组合编号覆盖条件取值判定条件取值判定条件组合1 TI,T2 M x>0,z<10,M取真2 TI,F2 /M x>0,z>=10,M取假3 FI,T2 /M x<=0,z<10,M取假4 FI,F2 /M x<=0,z>=10,M取假5 T3,T4 N x==4,y>5,N取真6 T3,F4 N x==4,y<=5,N取真7 F3T4 N x!=4,y>5,N取真8 F3,F4 /N x!=4,y<=5,N取假测试用例测试用例取值条件覆盖路径覆盖组合T1,T2,T3,T4 P1(abcdefhijl) 1,5 输入{x=4,y=8,z=8}输出{j=0}输入{x=4,y=4,z=15}T1F2,T3,F4 P3(abgijl) 2,6 输出{j=2}F1,T2,F3,T4 P3(abgijl) 3,7 输入{x=0,y=8,z=8}输出{j=1}F1F2,F3,F4 P4(abgkl) 4,8 输入{x=0,y=3,z=15}输出{j=0}6.路径覆盖测试用例覆盖路径覆盖条件覆盖组合P1(abcdefhijl) T1,T2,T3,T4 1,5 输入{x=4,y=8,z=8}输出{j=0}输入{x=3,y=3,z=8}P2(abcdefhkl) T1F2,F3,F4 1,8 输出{j=2}P3(abgijl) F1,F2,F3,T4 4,7 输入{x=0,y=7,z=15}输出{j=1}P4(abgkl) F1F2,F3,F4 4,8 输入{x=0,y=4,z=15}输出{j=0}五、讨论心得在试验过程中,我们对于白盒测试还是没有熟练的掌握,还需要不断地练习,但是我们也已经收获了很多,特别是路径测试,我们掌握到了路径测试的一些方法,知道了划分路径的方法,,怎样设计测试用例。
ospf配置实验报告

ospf配置实验报告OSPF配置实验报告一、实验目的本实验旨在通过配置OSPF(开放最短路径优先)协议,实现网络中路由器之间的动态路由选择,并验证其可行性和有效性。
二、实验环境本实验使用了三台路由器,分别命名为R1、R2和R3。
它们之间通过以太网连接,并配置了各自的IP地址。
三、实验步骤1. 配置IP地址在每台路由器上分别配置IP地址。
以R1为例,进入路由器的配置模式,输入以下命令:```R1(config)# interface ethernet0/0R1(config-if)# ip address 192.168.1.1 255.255.255.0R1(config-if)# no shutdown```同样地,对于R2和R3,分别配置IP地址为192.168.1.2和192.168.1.3。
2. 配置OSPF协议在每台路由器上配置OSPF协议,使其能够互相通信。
以R1为例,进入路由器的配置模式,输入以下命令:```R1(config)# router ospf 1R1(config-router)# network 192.168.1.0 0.0.0.255 area 0```同样地,对于R2和R3,分别配置区域号为0,网络地址为192.168.1.0/24。
3. 验证配置结果在每台路由器上查看OSPF邻居关系是否建立成功。
以R1为例,输入以下命令:```R1# show ip ospf neighbor```如果OSPF邻居关系建立成功,将显示R2和R3的IP地址。
4. 测试路由选择在R1上配置一个路由器接口的故障,模拟网络中的链路故障。
以R1为例,进入路由器的配置模式,输入以下命令:```R1(config)# interface ethernet0/0R1(config-if)# shutdown```此时,R1与R2之间的链路将被切断。
在R2上查看路由表,输入以下命令:```R2# show ip route```可以看到R2的路由表中已经没有R1的网络地址。
智能循迹小车实验报告

摘要本设计主要有单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计采用STC公司的89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够轻松识别黑白两色路面,同时具有抗环境干扰能力,电机模块由L298N芯片和两个直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词智能小车STC89C52单片机L298N 红外光对管1绪论随着科学技术的发展,机器人的设计越来越精细,功能越来越复杂,智能小车作为其的一个分支,也在不断发展。
在近几年的电子设计大赛中,关于小车的智能化功能的实现也多种多样,因此本次我们也打算设计一智能小车,使其能自动识别预制道路,按照设计的道路自行寻迹。
2设计任务与要求采用MCS-51单片机为控制芯片(也可采用其他的芯片),红外对管为识别器件、步进电机为行进部件,设计出一个能够识别以白底为道路色,宽度10mm 左右的黑色胶带制作的不规则的封闭曲线为引导轨迹并能沿该轨迹行进的智能寻迹机器小车。
3方案设计与方案选择3.1硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。
3.1.1单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。
由于以前自己开发板使用的是ATMEL公司的STC89C52,所以让然选择这个芯片作为控制核心部件。
STC89C52是一种低损耗、高性能、CMOS八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。
其程序和数据存储是分开的。
3.1.2传感器模块方案一:使用光敏电阻组成光敏探测器采集路面信息。
阻值经过比较器输出高低电平进行分析,但是光照影响很大,不能稳定工作。
方案二:使用光电传感器来采集路面信息。
使用红外光电对管,其结构简明,实现方便,成本低廉,没有复杂的图像处理工作,因此反应灵敏,响应时间少。