华科大版机械原理课后习题答案-第五六七章作业-
机械原理习题册答案
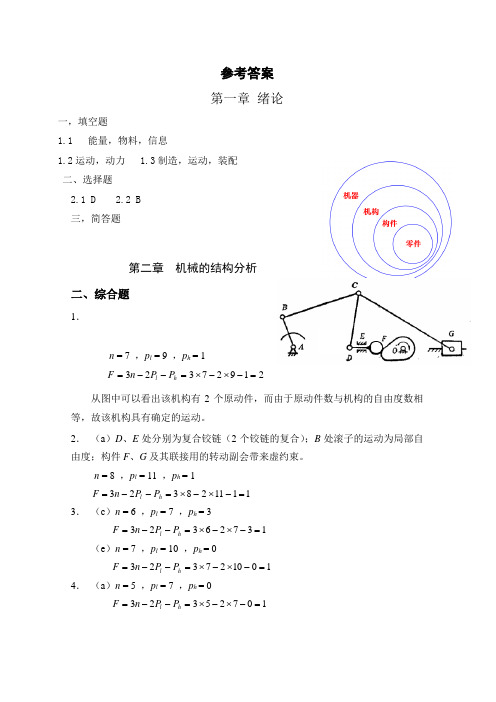
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
华中科技大学机械原理课后答案
华中科技大学机械原理课后答案【篇一:华中科技大学《机械设计基础》期末试卷及答案】s=txt>《机械设计基础》期末考试试题一、填空题(每空1分,共30分)1、构件是机器的分为______零件和_______零件;部件是机器的_______单元体。
2、运动副是使两构件,同时又具有的一种联接。
平面运动副可分为和4、绘制凸轮轮廓曲线,需已知__________、___________和凸轮的转向。
__________。
6、渐开线标准直齿圆柱齿轮正确啮合的条件为______和______分别相等。
7.斜齿圆柱齿轮的重合度______直齿圆柱齿轮的重合度,所以斜齿轮传动______,承载能力______,可用于____________的场合。
8.机械静联接又可以分为______联接和______联接,其中键联接、螺纹联接、销联接属于_________。
9.螺纹联接防松的目的是防止___________________________,按工作原理的不同有三种防松方式:_________、_________、_________。
10.按轴的承载情况不同,可以分为转轴、________、_________。
二、判断题(每题1分,共10分)1、所有构件一定都是由两个以上零件组成的。
()3、凸轮机构中,从动件按等速运动规律运动时引起刚性冲击。
()4、v带型号中,截面尺寸最小的是z型。
()5、定轴轮系的传动比等于始末两端齿轮齿数之反比。
()6、在直齿圆柱齿轮传动中,忽略齿面的摩擦力,则轮齿间受有圆周力、径向力和轴向力三个力作用。
()7、蜗杆传动一般用于传动大功率、大速比的场合。
()8、设计键联接时,键的截面尺寸通常根据传递转矩的大小来选择。
()9、在螺纹联接的结构设计中,通常要采用凸台或鱼眼坑作为螺栓头和螺母的支承面,其目的是使螺栓免受弯曲和减小加工面。
() 10、在相同工作条件的同类型滚动轴承,通常尺寸越大,其寿命越长。
机械原理课后习题答案
inva )
=6.8mm
分度圆半径r=mz/2=10*18/2=90mm
齿槽宽:ea=2π ra/z-sa
分度圆齿厚s=π m/2=15.7mm
=28.1mm
齿顶圆半径ra=r+ha*m=90+10=100mm
基圆半径rb=rcosα=90cos200=84.57mm
inv200=0.0148
齿顶圆压力角
第2章 平面机构的结构分析
2-7:计算自由度,指出所有的复合铰链、局部自由度和虚约束,判定运动 是否确定; 解:自由度:
a) F=3n-2PL-PH=3*3-2*4=1;确定 b) F=3n-2PL-PH=3*6-2*8=2;不确定 c) F=3n-2PL-PH=3*4-2*5-1=1;确定 d) F=3n-2PL-PH=3*4-2*5-1=1;确定
从而lAB+lBC, lBC-lAB可求得,最后确定lAB和lBC; 设计步骤:
①取一点A,并定D点; ②以D为圆心,作圆; 根据CD摆角15°定C1,C2点; ③ 量取lAC1,lAC2
lAB+lBC=430 lBC-lAB=348
C2 15° 15°C1
B A
lAB=41
A
B1
D
lBC=389
B2
虚约束
局部自由度
复合铰链
a)
b)
c)
d)
机械原理 作业
第2章 平面机构的结构分析
2-8:计算自由度;确定机构所含杆组的数目与级别;确定机构级别。画出 瞬时替代机构; 解:自由度:
a) F=3n-2PL-PH=3*7-2*10=1;Ⅱ级 b) F=3n-2PL-PH=3*6-2*8-1=1;Ⅲ级
华科机械原理课后习题答案第五六七章_
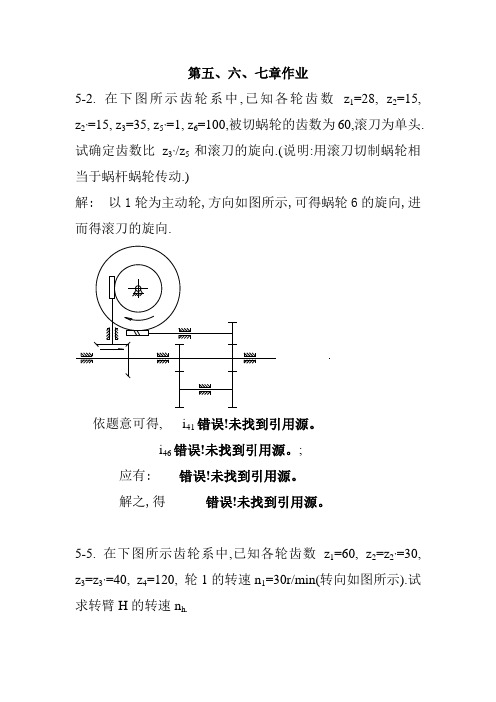
第五、六、七章作业5-2. 在下图所示齿轮系中,已知各轮齿数z1=28, z2=15, z2’=15, z3=35, z5’=1, z6=100,被切蜗轮的齿数为60,滚刀为单头.试确定齿数比z3’/z5和滚刀的旋向.(说明:用滚刀切制蜗轮相当于蜗杆蜗轮传动.)解: 以1轮为主动轮,方向如图所示,可得蜗轮6的旋向,进而得滚刀的旋向.依题意可得, i41错误!未找到引用源。
i46错误!未找到引用源。
;应有: 错误!未找到引用源。
解之,得错误!未找到引用源。
5-5. 在下图所示齿轮系中,已知各轮齿数z1=60, z2=z2’=30, z3=z3’=40, z4=120, 轮1的转速n1=30r/min(转向如图所示).试求转臂H的转速n h.解:图中的周转齿轮系,其转化轮系的传动比的计算公式为i H14错误!未找到引用源。
由此可解得: 错误!未找到引用源。
(负号表示与n1反向) ;5-8. 在下图所示齿轮系中,已知各轮齿数z1=20, z2=40, z3=20, z4=80, z4’=60, z5=50,z5’=55, z6=65, z6’=1, z7=60, 轮1、3的转速n1=n3=3000r/min(转向如图所示). 试求转速n7.解依题意, 错误!未找到引用源。
n2错误!未找到引用源。
i 34错误!未找到引用源。
对于周围齿轮系4’-5-5’-6; 此转化轮系的传动比计算公式为:i H 36错误!未找到引用源。
;由此解出 错误!未找到引用源。
(负号表示与n 2反向);进而n 7=错误!未找到引用源。
;5.12 在如图所示齿轮系中,已知各轮齿数1z =20,2z =40,3z =35,'3z =30,''3z =1,4z =20,5z =75,'5z =80,6z =30,7z =90,8z =30,9z =20,10z =50,轮1的转速1n =100r/min,试求轮10的转速10n 。
(完整版)华中科技大学机械原理6

§5-1 定轴齿轮系及其传动比 §5-2 周转齿轮系及其传动比 §5-3 §5-4 §5-5 §5-6 减速器
齿轮系:由一系列齿轮组成的传动 称为齿轮系
定 轴 轮 系
周 转 轮 系
复 合 轮 系
齿轮系的传动比:轮系中首末两轮的角 速度之比,包括计算传动比大小和确定 首末两轮的转向关系。
已知:z1=30, z2=20, z2’=30, z3 = 25, z4 = 100 n1=100r/min, 求i1H。
1)分清轮系:1-2为两定轴轮系,2’-3-4, H为行星轮系。
2)分列方程
3
n1 z2
n2'
nH
z3z4
1
,
H
n2
z1 n4 nH
z2'z3 2
2'
3)联立求解:
1
3
4
(1)在1-2-3-H组成的行星轮系中,有:
i1H
1 i1H3
1 (
z3 ) z1
1
57 6
63 6
2 2'
(2)在4-2'-2-3-H组成的行 星轮系中,有:
H
1
i4 H
1 i4H3
1 ( z2z3 ) z4 z2
1
25 57 56 25
解得: n5 封31闭50式0 复59合3 (轮r m系in )
(n5与n1转向相同)
§5-4 齿轮系的功用
1、在体积较小及重量较轻的条件下,实现大功率传动
2、获得较大的传动比
3’
3
2’
2
3、用作运动的合成
2
3
H
机械原理 第6章 轮系及其设计习题解答

32'1O 123'O 3O 44O 2机械原理 第六章 齿轮系及其设计习题解答6.1 在图示的手摇提升装置中,已知各轮齿数为201=z ,502=z ,153=z ,304=z ,406=z 。
试求传动比16i 并指出提升重物时手柄的转向。
解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i方向:从左往右看为顺时针方向。
题 6.1 图 题 6.2 图6.2 在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z ,404=z 。
试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施?解: (1) 620202040304032143214-=⨯⨯⨯⨯==''z z z z z z i由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—”(2)如要变更i 14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。
6.3 在图示的机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。
已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z ,68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针的传动比SM i 和分针与时针的传动比MH i 。
解: 该轮系为平面定轴轮系,故有 60886460)1(463524664=⨯⨯=-====z z z z n n i n n i M S SM 12682424)1(11912102129912=⨯⨯=-====z z z z n n i n n i H M MH题 6.3 图 题 6.4 图6.4 图示为一滚齿机工作台的传动机构,工作台与蜗轮5固联。
华科大版机械原理课后习题答案—第五六七章作业

华科大机械原理课后习题答案第五、六、七章作业5-2. 在下图所示齿轮系中,已知各轮齿数 z1=28, z2=15,z2’=15, z3=35, z5’=1, z6=100,被切蜗轮的齿数为60,滚刀为单头.试确定齿数比z3’/z5和滚刀的旋向.(说明:用滚刀切制蜗轮相当于蜗杆蜗轮传动.)解: 以1轮为主动轮,方向如图所示,可得蜗轮6的旋向,进而得滚刀的旋向.依题意可得, i41i46;应有:解之,得5-5. 在下图所示齿轮系中,已知各轮齿数 z1=60, z2=z2’=30, z3=z3’=40, z4=120, 轮1的转速n1=30r/min(转向如图所示).试求转臂H的转速n h.解:图中的周转齿轮系,其转化轮系的传动比的计算公式为i H14由此可解得: (负号表示与n 1反向) ;5-8. 在下图所示齿轮系中,已知各轮齿数 z 1=20, z 2=40, z 3=20, z 4=80, z 4’=60, z 5=50,z 5’=55, z 6=65, z 6’=1, z 7=60, 轮1、3的转速n 1=n 3=3000r/min(转向如图所示). 试求转速n 7. 解:依题意, n 2i 34对于周围齿轮系4’-5-5’-6; 此转化轮系的传动比计算公式为: i H36;由此解出(负号表示与n 2反向);进而 n 7=;在如图所示齿轮系中,已知各轮齿数1z =20,2z =40,3z =35,'3z =30,''3z =1, 4z =20,5z =75,'5z =80,6z =30,7z =90,8z =30,9z =20,10z =50,轮1的转速1n =100r/min,试求轮10的转速10n 。
解:1n =100 则2n =211n =50r/min在3-4-5-2中,Hn 35=352523z zn n n n -=--在3’-5-5’-6-7中 '37575'37'3z zn n n n n H -=--=在5’-7-8-9中 '5979'59'57z z n n n n n H -=--=又因为''3'33n n n ==解上述方程可得''3'33n n n ===18110000所以10n =181200第六章六角自动车床的六角头外槽轮机构中,已知槽轮的槽数Z=6,一个循环中槽轮的静止时间'2t =5/6S,静止时间是运动时间的2倍,试求:(1) 槽轮机构的运动系数τ; (2) 所需的圆销数K 。
机械原理课后习题答案.pdf

[解]
(1)取μι作机构运动简图;
μl
=
0.002
m mm
C3
lBC =
l
2 AB
+
l
2 AC
−
l AB
⋅ lAB
⋅ cos135
= 302 + 1002 − 30 ×100 × cos135 = 123 (mm)
B
D
2
1 ω1
A
ϕ1
4
E
(2)速度分析 取C为重合点:C( C2, C3)
vB → vC 2 → vD ,vE → ω2
p(c3)
ω2
2
D
c2
2) 求aC2
aC 2 = aB
+ aCn 2B
+
at C 2B
=
aC 3
+
aCk
2C 3
+ aCr 2C 3
方向: B→A C→B ⊥CB
0 ⊥CБайду номын сангаас向下 ∥BC e
大小: √ √
?
0√
?
E
d
b
其中:
an C 2B
= ω2 2
lBC
=
2.02
4
C P34
1
A P12
题3-1 试求图示各机构在图示位置时全部瞬心。
b) P13
P34 B
3
P 23 →∞
2
P12
A
4
C P14→∞
P24
1
题3-1 试求图示各机构在图示位置时全部瞬心。
c)
P13 P14 C
4
→∞ P 34
M
vM
7机械原理第七章课后习题解答
机械原理课后习题解答
第7章 机械的运转及其速度波动的调节
7-7图示为一机床工作台的传动系统。
设已知各齿轮的齿
数,齿轮3的分度圆半径r 3,各齿轮的转动惯量J 1、J 2、J 2'、J 3,
齿轮1直接装在电动机轴上,故J 1中包含了电动机转子的转动
惯量;工作台和被加工零件的重量之和为G 。
当取齿轮1为等
效构件时,试求该机械系统的等效转动惯量J e 。
7 -12某内燃机的曲柄输出力矩M d
随曲柄转角φ的变化曲线如图所示,其运动周期φT=π,曲柄的平均转速n m=620 r/min。
当用该内燃机驱动一阻抗力为常数的机械时,如果要求其运转不均匀系数δ= 0. 01。
试求:
(1)曲轴最大转速n max和相应的曲柄转角位置φmax;
(2)装在曲轴上的飞轮转动惯量J F(不计其余构件的转动惯量)。
机械原理课后答案7章
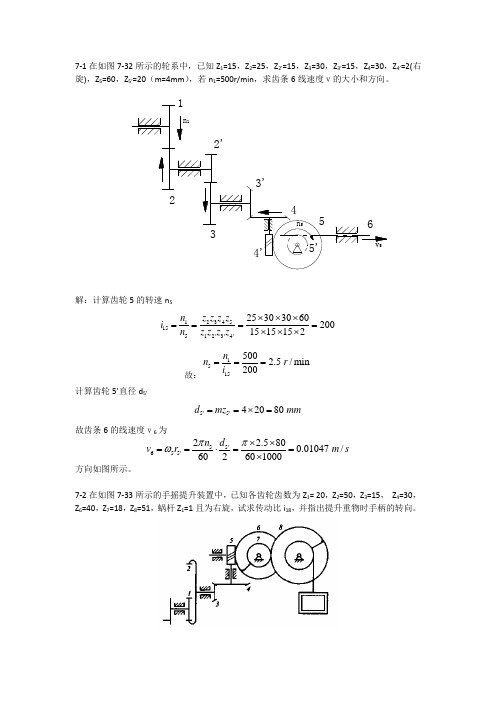
7-1在如图7-32所示的轮系中,已知Z 1=15,Z 2=25,Z 2’=15,Z 3=30,Z 3’=15,Z 4=30,Z 4’=2(右旋),Z 5=60,Z 5’=20(m=4mm ),若n 1=500r/min ,求齿条6线速度v的大小和方向。
解:计算齿轮5的转速n 52345115512'3'4'253030602001515152z z z z n i n z z z z ⨯⨯⨯====⨯⨯⨯故:15155002.5 /min 200n n r i ===计算齿轮5’直径d 5’5'5'42080 d mz mm==⨯=故齿条6的线速度v6为55'655'2 2.5800.01047 /602601000n d v r m s ππω⨯⨯==⋅==⨯方向如图所示。
7-2在如图7-33所示的手摇提升装置中,已知各齿轮齿数为Z 1= 20,Z 2=50,Z 3=15, Z 4=30,Z 6=40,Z 7=18,Z 8=51,蜗杆Z 1=1且为右旋,试求传动比i 18,并指出提升重物时手柄的转向。
解:246811881357503040515682015118z z z z i z z z z ωω⨯⨯⨯====⨯⨯⨯提升重物时手柄的转向如图所示。
7-3在如图7-34所示的轮系中,已知各齿轮齿数为Z 1= 20,Z 2=30,Z 3=18, Z 4=68,齿轮1的转速n 1=500r/min ,试求系杆H的转速n H 的大小及方向。
解:1241441330685.672018H H H n n z z i n n z z -⨯==-=-=--⨯40n =115.6715022.496.67 6.67H HH n n n n n -====方向与n 1相同。
7-4在如图7-35所示的双级行星齿轮减速器中,各齿轮齿数为Z 1= Z 6 =20,Z 2=30,Z 3=Z 4=40,Z 2=Z 5=10,试求:(1) 固定齿轮4时的传动比i 1H2; (2) 固定齿轮3时的传动比i 1H2。
机械原理作业答案1-8-A4
3—6已知铰链四杆机构的位置及尺寸如图(a)所示,现已作出其速度多边形图(b)和加速度多边形(c)。试在图中求出:
(1)构件1、2、3上速度为vx的点X1、X2、X3的位置;
(2)构件2上速度为零的点M2的位置,并在加速度多边形图(c)上找出点m′2;
(3)构件2上加速度为零的点Q2的位置,并在速度多边形图(b)上找出点q2。
(3) 大小的表达式,在机构图上标出其方向。
(矢量方程及必要的分析计算):
解:1.速度分析
方向∥AC⊥AB⊥CB
大小??
利用速度影像原理求得d2(d4)点,
方向⊥DE∥ED
大小??
利用速度影像原理求得f点,
2.加速度分析
方向∥AC B→A B→C⊥CB
大小??
利用加速度影像原理求得d2′(d4′)点
解:机构简图如下:
机构不能运动。
可修改为:
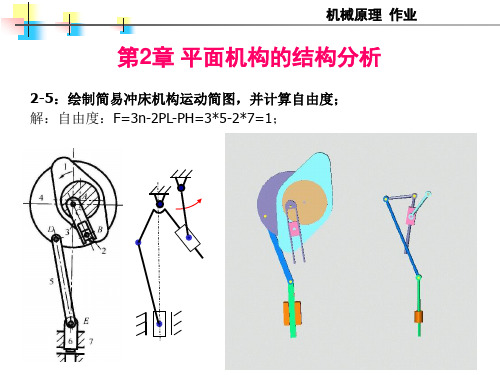
2—6计算图示自动送料剪床机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。
2—7计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。说明该机构具有确定运动的条件。
机构具有确定运动的条件是:F=原动件数,即取1个原动件。
2—8计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。说明该机构具有确定运动的条件。
3—3在图示的齿轮—连杆组合机构中,试用速度瞬心法求齿轮1与齿轮3的传动比。
3—4下列图示机构中,已知 ,试用相对运动图解法求C点的速度vC(在 的基础上作速度多边形并列出有关速度矢量方程)。
用速度影像原理求得c点,
3—5在图示干草压缩机中,已知ω1=5rad/s,lAB=150mm,lBC=600mm,lCE=300mm,lCD=460mm,lEF=600mm,xD=600mm,yD=500mm,yF=600mm,φ1=30°,求活塞5的速度v5和加速度a5。
机械原理最全课后习题答案

第二章 平面机构的结构分析题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A上,只能作为一个活动件,故3=n3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
1(c)题2-154364(a)53221讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d)所示。
题2-2 图a所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
华东理工大学-机械原理-第7章齿轮--习题及答案(全)

习 题7-9 在图示的渐开线齿阔中,基圆半径100b r mm =,试求出:1)当135mm k r =时,渐开线的展角k θ,渐开线压力角k α和渐开线在K 点的曲率半径k ρ。
2)当020k θ=,025和030时,渐开线的压力角k α和向径k r 。
解:1) /cos k b k r r α= 100cos 0.741135b k k r r α=== 42.2o k α=tan 0.17022k k k θαα=-= sin 90.68k k k r mm ρα==2) 当20o k θ=时,51.15o k α=,/cos 159.42k b k r r mm α== 当25o k θ=时,'545o k α=,/cos 170.47k b k r r mm α== 当30o k θ=时,'5628o k α=,/cos 181.02k b k r r mm α==7-10今测得一渐开线直齿标准齿轮齿顶圆直径110mm a d =,齿根圆直径87.5mm f d =,齿数20z =,试确定该齿轮的模数m ,齿顶高系数*a h 和径向间隙系数*c 。
解:*(2)a a d m z h =+**(22)f a d m z h c =-- f a d d d <<d mz = 5m mm ∴=代入求解,得:*1a h =,*0.25c =7-11已知一对外啮合渐开线直齿圆柱齿轮,齿数120z =,241z =,模数2mm m =,*1a h =,*0.25c =,020α=,求:1)当该对齿轮为标准齿轮时,试计算齿轮的分度圆直径1d 、2d ,基圆直径1b d 、2b d ,齿顶圆直径1a d 、2a d ,齿根圆直径1f d 、2f d ,分度圆上齿距p 、齿厚s 和齿槽宽e 。
2)当该对齿轮为标准齿轮且为正确安装时的中心距,求齿轮1的齿顶压力角1a α,齿顶处齿廓的曲率半径1a ρ。
机械原理课后题答案
选择填空:(1)当机构的原动件数目小于或大于其自由度数时,该机构将( B )确定运动。
A.有;B.没有;C.不一定;(2)在机构中,某些不影响机构运动传递的重复部分所带入的约束为( A )。
A.虚约束;B.局部自由度;C.复合铰链;(3)机构具有确定运动的条件是(B )。
A.机构自由度数小于原动件数;机构自由度数大于原动件数;B.机构自由度数等于原动件数;(4)用一个平面低副联二个做平面运动的构件所形成的运动链共有( B )个自由度。
A.3;B.4;C.5;D.6;(5)杆组是自由度等于( A )的运动链。
A.0;B.1;C.原动件数。
(6)平面运动副所提供的约束为( D )。
A.1;B.2;C.3;D.1或2;(7)某机构为Ⅲ级机构,那么该机构应满足的必要充分条件是( D )。
A.含有一个原动件组;B.原动件;C.至少含有一个Ⅱ级杆组;D.至少含有一个Ⅲ级杆组;(8)机构中只有一个(D )。
A.闭式运动链;B.原动件;C.从动件;D.机架。
(9)具有确定运动的差动轮系中其原动件数目( C )。
A.至少应有2个;B.最多有2个;C.只有2个;D. 不受限制。
(10)在加速度多边形中,连接极点至任一点的矢量,代表构件上相应点的____B__加速度;而其它任意两点间矢量,则代表构件上相应两点间的______加速度。
A.法向; 切向B.绝对; 相对C.法向; 相对D.合成; 切向(11)在速度多边形中,极点代表该构件上_____A_为零的点。
A.绝对速度B.加速度C.相对速度D.哥氏加速度(12)机械出现自锁是由于( A )。
A. 机械效率小于零;B. 驱动力太小;C. 阻力太大;D. 约束反力太大;(13)当四杆机构处于死点位置时,机构的压力角_B _。
A. 为00;B. 为090;C. 与构件尺寸有关;(14)四杆机构的急回特性是针对主动件_D _而言的。
D. 等速运动;E. 等速移动;F. 变速转动或变速移动;(15)对于双摇杆机构,最短构件与最长构件之和_H _大于其余两构件长度之和。
机械原理课后习题答案部分)

第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华科大机械原理课后习题答案
第五、六、七章作业
5-2. 在下图所示齿轮系中,已知各轮齿数 z1=28, z2=15,
z2’=15, z3=35, z5’=1, z6=100,被切蜗轮的齿数为60,滚刀为
单头.试确定齿数比z3’/z5和滚刀的旋向.(说明:用滚刀切制
蜗轮相当于蜗杆蜗轮传动.)
解: 以1轮为主动轮,方向如图所示,可得蜗轮6的旋向,进
而得滚刀的旋向.
依题意可得, i41
i46;
应有:
解之,得
5-5. 在下图所示齿轮系中,已知各轮齿数 z1=60, z2=z2’=30, z3=z3’=40, z4=120, 轮1的转速n1=30r/min(转向如图所示).试求转臂H的转速n h.
解:
图中的周转齿轮系,其转化轮系的传动比的计算公式为
i H14
由此可解得: (负号表示与n1反向) ;
5-8. 在下图所示齿轮系中,已知各轮齿数 z1=20, z2=40, z3=20, z4=80, z4’=60, z5=50,z5’=55, z6=65, z6’=1, z7=60, 轮1、3的转速n1=n3=3000r/min(转向如图所示). 试求转速
n7.
解:
依题意, n2
i34
对于周围齿轮系4’-5-5’-6; 此转化轮系的传动比计算公式为:
i H36 ;
由此解出(负号表示与n2反向);
进而n7=;
5.12 在如图所示齿轮系中,已知各轮齿数
z=20,2z=40,3z
1
=35,
z=30,''3z=1,4z=20,5z=75,'5z=80,6z=30,7z=90,'3
z=30,9z=20,10z=50,轮1的转速1n=100r/min,试求轮10 8
的转速
n。
10
解:
1n =100 则2n =
2
1
1n =50r/min 在3-4-5-2中,H
n 35=3
5
2523z z
n n n n -=--
在3’-5-5’-6-7中 '
37
575'37'3z z
n n n n n H -=--=
在5’-7-8-9中 '
59
79'59'57z z n n n n n H -=--=
又因为''3'33n n n ==
解上述方程可得''3'33n n n ===181
10000
所以10n =181
200
第六章
6.1六角自动车床的六角头外槽轮机构中,已知槽轮的槽数Z=6,一个循环中槽轮的静止时间'2t =5/6S,静止时间是运动时间的2倍,
试求:(1) 槽轮机构的运动系数τ; (2) 所需的圆销数K 。
解:因为静止时间是运动时间的2倍 则τ =2t /1t =1/3
又因为τ=Z
Z K 2)2(-=1/3 Z=6
故K=1
6.2 某自动机上装有一个单销六槽的外槽轮机构,已知槽轮停歇时进行工艺动作,所需的工艺时间为30s ,试确定主动轮的转速。
解:停歇时间'2t =2
1
t t
-=30s
又因为τ=1
23
12Z
2-Z K t t =
=)(
解得1t =45s 所以 w=1
2t π=45
2π
第七章
7-3如题图所示的(a ),(b )两种机构系统均能实现棘轮的间歇运动,试分析此两种机构系统的组合方式,并画出组合框图。
若要求棘轮的输出运动有较长的停歇时间,试问采用哪一种机构系统方案较好?
(a)(b)
解:可知(a)为串联式组合,(b)为串联式组合,若要求棘轮的输出运动有较长的停歇时间,则采用(b)种机构系统方案较好。
7-9 题图所示的差动螺旋机构种,螺杆3与机架刚性联接,其螺纹式右旋的,导程=4mm,螺母2相对于机架只能移动,内外均有螺纹的螺杆1沿肩头方向转5圈时,要求螺母只向左移动5mm,试求1,2组成的螺旋副的导程及其旋向。
解:由差动螺旋机构可
知,两螺旋副的旋向相
同,所以1,2组成的螺旋副的旋向为右旋。
S=(
所以5mm
7-13设单万向轴节的主动轴1以等角速度=157.08rad/s转动,从动轴2的最大瞬时速度=181.28rad/s,求轴2的最小角速度及两轴的夹角。
解:当为最大角速度时,=1,所以=/cosα
所以 cos=0.867
且=cos=136.19
(注:文档可能无法思考全面,请浏览后下载,供参考。
)。