赛车转向系统的设计方案
赛车悬架转向杆系的优化设计
赛车悬架转向杆系的优化设计杨永旺;张代胜【摘要】文章运用自然坐标法建立了赛车悬架转向杆系的运动学模型,推导了约束方程,给出了赛车转向时车轮偏转角度和轮胎上下跳动时前束值的计算方法;采用加权合并法,建立了综合考虑赛车轮胎磨损、运动协调性和机动性的非线性优化目标函数,并提出了一种GA‐PSO(Genetic Algorithm‐Particle Swarm Optimization)混合算法进行求解。
针对特定赛车进行了优化设计,优化结果表明了该方法是有效的。
%By using the natural coordinates method ,a kinematical model of suspension and steering linkages in racing car was established .The constraint equations of this system were deduced .The calculation method of both the wheel steering angle during cornering and the toe caused by wheel bouncing was given .By using the weighted combination method ,a nonlinear optimization object function was established ,which took the tire wear ,motion compatibility and mobility into account .Then a hybrid algorithm of genetic algorithm‐particle sw arm optimization (GA‐PSO) was put forward to solve the problem .Finally ,the effectiveness of the pro‐posed method w as verified by an example of a racing car .【期刊名称】《合肥工业大学学报(自然科学版)》【年(卷),期】2016(039)007【总页数】5页(P887-891)【关键词】自然坐标法;GA-PSO混合算法;悬架转向;优化设计;赛车【作者】杨永旺;张代胜【作者单位】合肥工业大学机械与汽车工程学院,安徽合肥 230009;合肥工业大学机械与汽车工程学院,安徽合肥 230009【正文语种】中文【中图分类】U463.45赛车悬架转向杆系设计合理与否直接关系到赛车的操纵性能和轮胎的使用寿命。
FSAE赛车转向系统的研究与设计

FSAE赛车转向系统的研究与设计大学生方程式大赛(FSAE)是为热爱赛车的在读大学生举办的一项竞赛。
汽车的转向系统是用来保持或者改变行驶方向的机构。
本文从该角度分析了赛车转向系统的作用、基本构成、要求和总体性能。
标签:FSAE赛车;齿轮齿条式转向器;设计一、研究意义FSAE旨在通过学生亲手设计制造一辆满足大赛要求的赛车,来提高学生对汽车设计知识的拓展应用能力和实际加工动脑动手能力。
大赛赛道设有转向半径较小的急转弯道和间距不等的障碍道,需要赛车转向系统灵敏、轻便、高效。
FSAE 赛车的转向系统设计能使车手在比赛时更好地高速避障、入弯出弯及紧急转向保证行车安全。
二、FSAE转向系统概述转向系统是用来保持或者改变车辆行驶方向并在车辆转向行驶时保证各转向轮之间有协调的转角关系的机构。
FSAE大赛规定仅使用机械转向系统,即依靠驾驶员的手力转动转向盘,经转向器和转向传动机构使转向轮偏转。
转向器作为改变汽车行驶方向及保持汽车稳定直线行驶的关键零部件,其性能至关重要。
转向系统的技术状况,对于保证行驶安全、减轻驾驶员劳动强度和延长车辆使用寿命均有很重要的作用。
如何改善赛车转向系统的操纵稳定性、灵敏性、可靠性和轻便性,应作为设计工作的重点。
另外,合适的转向器对转向系统也很重要。
比赛还规定:转向系統必须安装有效的转向限位块,以防止转向连杆结构反转;限位块可安装在转向立柱或齿条上,并且必须防止轮胎在转向行驶时接触悬架、车身或车架部件;转向系统的自由行程不得超过7°;方向盘必须安装在快拆器上,保证车手在正常驾驶坐姿并配戴手套时可以操作快拆器;方向盘轮廓必须为连续闭合的近圆形或近椭圆形。
三、FSAE赛车转向系统设计初始参数:1.转向盘总圈数≤3.02.转向盘直径≤200mm3.最大转向盘操纵力≤100N4.转向盘在上下方向的最大调节量≥50mm转向系统的设计要求:(1)保证汽车有较高的机动性;(2)汽车转向时,全部车轮应绕一个瞬时转向中心旋转,不应有侧滑;(3)传给转向盘的反冲要尽量小;(4)转向后转向盘应自动回正,并使汽车保持直线行驶状态;(5)发生车祸时,当转向盘和转向轴由于车架和车身变形后移时,转向系统最好有保护机构防止伤到乘员。
大学生方程式赛车设计——转向系统

赛车转向系统是用于改变或保持赛车行驶方向的专门机构。
起作用是使赛车在行驶过程中能按照车手的操纵要求而适时地改变其行驶方向,并在受到路面传来的偶然冲击及赛车意外地偏离行驶方向时,能与行驶系统配合共同保持赛车继续稳定行驶。
因此,转向系统的性能直接影响着赛车的操纵稳定性和安全性。
对赛车的行驶安全至关重要,因此赛车转向系统的零件都称为保安件。
赛车转向系统和制动系统都是赛车安全必须要重视的两个系统。
当转动赛车方向盘时,车轮就会转向。
为了使车轮转向,方向盘和轮胎之间发生了许多复杂的运动。
最常见的赛车转向系统的工作原理包括:齿条齿轮式转向系统和循环球式转向系统。
当赛车转向时,两个前轮并不指向同一个方向。
要让赛车顺利转向,每个车轮都必须按不同的圆圈运动。
由于内车轮所经过的圆圈半径较小,因此它的转向角度比外车轮要大。
如果对每个车轮都画一条垂直于它们的直线,那么线的交点便是转向的中心点。
转向拉杆具有独特的几何结构,可使内车轮的转向度大于外车轮。
赛车转向系统分为两大类:机械转向系统和动力转向系统。
a机械转向系统:完全靠车手手力操纵的转向系统。
b动力转向系统:借助动力来操纵的转向系统。
动力转向系统又可分为液压动力转向系统和电动助力动力转向系统。
机械转向系以车手的体力作为转向能源,其中所有传力件都是机械的。
机械转向系由转向操纵机构、转向器和转向传动机构三大部分组成(如图)。
车手对转向盘施加的转向力矩通过转向轴输入转向器。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有级减速传动副。
经转向器放大后的力矩和减速后的运动传到转向横拉杆,再传给固定于转向节上的转向节臂,使转向节和它所支承的转向轮偏转,从而改变了赛车的行驶方向。
这里,转向横拉杆和转向节属于转向传动机构。
转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将车手转动转向盘的操纵力传给转向器。
机械转向器(也常称为转向机)是完成由旋转运动到直线运动(或近似直线运动)的一组齿轮机构,同时也是转向系中的减速传动装置。
转向梯形机构设计报告
采用齿轮齿条式转向器的转向梯形机构优化设计报告指导老师:***学生:黄志宇学号:********专业班级:车辆工程04班重庆大学方程式赛车创新实践班二〇一七年二月赛车转向系统是关系到赛车性能的主要系统,它是用来改变或恢复汽车行驶方向的系统的总称,通常,车手通过转向系统使转向轮偏转一定角度实现行驶方向改变。
赛车转向系统一股由方向盘、快拆、转向轴、转向柱、万向节、转向器、转向拉杆、梯形臂等部分组成。
其中,方向盘用于输入转向角度,快拆用于快速分离方向盘与转向柱,转向柱、转向轴、万向节共同将方向盘输入角度传递到转向器,转向器通过内部传动副机构将旋转运动转化为转向拉杆的直线运动,转向拉杆与梯形臂作用于转向节,实现车轮转向。
图1展示了转向系梯形结构,图2展示了赛车转向系统构成。
图1转向梯形机构图2赛车转向系统构成由于大赛组委会规则里面明确规定不允许使用线控或者电动转向,考虑到在赛车转向系统布置空间有限,且有严格的成本限制,以及轻量化的赛车设计目标,将赛车转向器范围限定机械式转向器。
目前,国内外的大多数方程式赛车采用齿轮齿条式转向器和断开式转向梯形结构。
●齿轮齿条式转向器齿轮齿条式转向器的传动副为齿轮齿条,其中,齿轮多与转向柱做成一体,齿条多与转向横拉杆直接连接,连接点即为断开点位置。
根据输出位置不同,分为两端输出式和中间输出式。
其主要优点是:结构简单,体积小,易于设计制作;转向器可选材料多样,壳体可选用招合金,质量轻;传动效率较高;容易实现调隙,当齿轮齿条或者齿条与壳体之间产生间隙时,可以通过安装在齿条背部的挤压力可调的弹簧来消除间隙;转向角度大,制造成本低。
其主要缺点是:传动副釆用齿轮齿条,正效率非常髙的同时,逆效率非常高,可以到达当汽车在颠簸路面上行驶时,路感反馈强烈,来自路面的反冲力很容易传递到方向盘;转向力矩大,驾驶员操纵费力,对方向盘的反冲容易造成驾驶员精神紧张,过度疲劳。
●断开式转向梯形结构根据转向器和梯形的布置位置的不同,断开式转向梯形又分为四类,分别为:转向器前置梯形前置,转向器后置梯形后置,转向器前置梯形后置,转向节后置梯形前置。
FSAE 赛车转向系统CAD 与CAE 设计
科技与创新┃Science and Technology&Innovation ·162·2021年第14期文章编号:2095-6835(2021)14-0162-03FSAE赛车转向系统CAD与CAE设计纪楚凡(武汉理工大学汽车工程学院,湖北武汉430000)摘要:在方程式赛车中,转向系统是最重要的组成部分之一,而齿轮齿条式转向器具有传动效率高、结构简单、制作成本低的优点,因此广泛应用于方程式赛车中。
为了使方程式赛车具有最优的转向性能,应用CAD/CAE软件对转向系统进行建模与仿真。
其中,利用CATIA建立转向系统的三维模型,利用ANSYS对其进行静力学分析,最后利用机械系统动力学分析软件ADAMS进行动力学分析。
最终获得了理想的阿克曼百分比,同时获得了理想的转向系统参数,从而使转向系统具有良好的操作稳定性和平顺性,使驾驶员获得最优的操作体验。
关键词:齿轮齿条;转向;方程式赛车;CAE分析中图分类号:U463.4文献标志码:A DOI:10.15913/ki.kjycx.2021.14.066中国大学生方程式汽车大赛是一项由中国汽车协会主办的,由高等院校汽车工程或汽车相关专业在校学生组队参加的汽车设计与制造比赛。
各参赛车队按照赛事规则和赛车制造标准,在一年的时间内自行设计和制造出一辆在加速、制动、操控性等方面具有优异表现的小型单人座休闲赛车,能够成功完成全部或部分赛事环节的比赛。
在FSAE赛车的设计开发中,转向系统是车手与赛车进行联系与互动最紧密的系统。
转向系统性能的优劣直接决定着整车操纵稳定性和平顺性的好坏,在整个赛车的设计过程中占有非常重要的地位。
随着计算机的诞生与发展,计算机辅助设计工程技术即CAD/CAE技术在汽车行业获得了广泛的应用。
应用CAD/CAE技术对赛车转向器进行设计,提高了设计参数的准确性,降低了成本,大大提高了整车设计过程中的效率。
1转向器的三维建模FASE赛车的转向系统主要由齿轮、齿条、壳体、转向传动轴、横拉杆、万向节等组成。
FSAE汽车转向系统设计

FSAE汽车转向系统设计FSAE (Formula Society of Automotive Engineers)汽车转向系统是赛车设计中十分重要的部分。
转向系统的设计需要考虑到车辆的操控性、安全性和性能。
本文将详细介绍FSAE汽车转向系统的设计原理和关键要素。
首先,FSAE汽车转向系统主要包括方向盘、转向齿轮传动、转向杆、转向齿条和转向臂等部件。
方向盘是驾驶员与转向系统之间的接触面,通过方向盘的转动来控制车辆的方向。
转向齿轮传动通过齿轮的配对来将方向盘的转动传递给转向臂。
转向杆与转向臂连接,并通过转向齿条来实现车轮的转向。
其次,FSAE汽车转向系统设计中的一项关键要素是转向比。
转向比是方向盘转动时车轮转动的比例关系。
通常,转向比越小,驾驶员转动方向盘时车轮转动的角度就越大,操控性越敏感。
转向比的选择要根据赛车的具体需求以及赛道的类型来确定。
在一个狭窄、弯道多的赛道上,需要一个较小的转向比来提高操控性能。
而在一个直线较长的赛道上,可以选择一个较大的转向比来提高车辆的稳定性。
另一个重要的设计原理是转向系统的减震装置。
赛车在高速行驶时可能会受到颠簸、冲击等外力的影响,这可能会对车辆的转向系统造成负面影响。
为了降低这些外力对转向系统的影响,可以在转向齿条或转向杆上安装减震装置。
这些减震装置可以减少转向系统的振动和冲击,提高操控性和稳定性。
此外,转向系统的材料选择也是设计中的一个重要方面。
转向系统的部件通常会承受较大的力和扭矩,因此需要选择强度高、耐疲劳性好的材料。
常用的材料包括铝合金、钢和碳纤维等。
选择适当的材料可以提高转向系统的可靠性和寿命。
最后,FSAE汽车转向系统设计还需要考虑到安全性。
转向系统应该设计成可靠的并具备适当的安全装置,以确保驾驶员在高速行驶中的安全。
例如,应该安装刹车支撑杆和碰撞安全装置等,以减少事故时对转向系统的损坏。
总结起来,FSAE汽车转向系统设计需要考虑操控性、安全性和性能。
FSAE赛车转向系统设计及性能分析任务书及开题报告资料

附件一毕业设计任务书设计(论文)题目FSAE赛车转向系统设计及性能分析学院名称汽车与交通工程学院专业(班级)车辆工程姓名(学号)胡嗣林指导教师张代胜系(教研室)负责人卢剑伟一、毕业设计(论文)的主要内容及要求(任务及背景、工具环境、成果形式、着重培养的能力)背景:中国汽车工业已处于大国地位,但还不是强国。
从制造业大国迈向产业强国已成为中国汽车人的首要目标,而人才的培养是实现产业强国目标的基础保障之一。
中国大学生方程式汽车大赛(以下简称"FSAE")是中国汽车工程学会及其合作会员单位,在学习和总结美、日、德等国家相关经验的基础上,结合中国国情,精心打造的一项全新赛事。
FSAE活动由各高等院校汽车工程或与汽车相关专业的在校学生组队参加。
FSAE要求各参赛队按照赛事规则和赛车制造标准,自行设计和制造方程式类型的小型单人座休闲赛车,并携该车参加全部或部分赛事环节。
比赛过程中,参赛队不仅要阐述设计理念,还要由评审裁判对该车进行若干项性能测试项目。
在比赛过程中,参赛队员能充分将所学的理论知识运用于实践中。
同时,还学习到组织管理、市场营销、物流运输、汽车运动等多方面知识,培养了良好的人际沟通能力和团队合作精神,成为符合社会需求的全面人才。
大学生方程式赛车活动将以院校为单位组织学生参与,赛事组织的目的主要有:一是重点培养学生的设计、制造能力、成本控制能力和团队沟通协作能力,使学生能够尽快适应企业需求,为企业挑选优秀适用人才提供平台;二是通过活动创造学术竞争氛围,为院校间提供交流平台,进而推动学科建设的提升;大赛在提高和检验汽车行业院校学生的综合素质,为汽车工业健康、快速和可持续发展积蓄人才,增进产、学、研三方的交流与互动合作等方面具有十分广泛的意义。
任务:调研国内外赛车转向系统结构及原理,遵循FSAE竞赛规则完成赛车转向系统设计,转向梯形优化,系统建模与转向性能分析。
工具环境:CATIA/UG AutoCAD ADAMS Visio MATLAB Office办公软件等成果形式:①翻译相关外文文献不少于5000字②优化设计说明书一份③赛车转向系统三维模型一份能力培养:培养和锻炼学生搜集相关资料,综合运用所学汽车设计知识解决实际问题的能力、提高学生软件应用能力、独立完成赛车转向系统设计及相关问题的能力,为从事本专业有关工作打下坚实基础。
FSAE赛车转向系统CAD与CAE设计

FSAE赛车转向系统CAD与CAE设计FSAE(Formula SAE)赛车是一种由学生设计和制造的小型单座赛车,旨在评估学生的工程能力和创新能力。
赛车的转向系统是其关键组成部分之一,对性能和操控性起着至关重要的作用。
因此,转向系统的CAD(计算机辅助设计)和CAE(计算机辅助工程)设计是确保赛车操纵性和安全性的重要环节。
在进行CAD设计时,首先要进行车辆框架的建模和结构设计。
这涉及到车辆的尺寸、重量分布和重心位置等因素的考虑。
通过利用CAD软件,可以绘制三维模型,以便更好地进行设计和分析。
同时,转向系统所涉及到的各个部件也需要进行详细的建模和设计,如转向臂、连杆、转向柱和转向齿轮等。
通过CAD软件可以实现对这些部件的尺寸、布局和安装位置进行精确控制,以确保其在赛车运行中的稳定性和性能。
除了CAD设计,CAE分析也是必不可少的一部分。
CAE工具可以模拟赛车在不同工况下的运行状态,并预测转向系统的性能和强度。
其中,最常用的CAE工具之一是有限元分析(FEA)。
通过将转向系统的CAD模型导入到FEA软件中,可以对系统进行载荷分析、应力分析和振动分析,以评估部件的强度和刚度。
这有助于了解转向系统在各种工况下的性能,并进行必要的优化和改进。
此外,CAE还可以用于进行动力学模拟。
动力学模拟可以模拟赛车在转弯时的动力学特性,如悬挂系统的工作状态和车辆的侧向力分布。
这对于转向系统的设计和调整非常重要,可以确保赛车在高速转弯和紧急避让等情况下的操纵稳定性和安全性。
总之,FSAE赛车的转向系统CAD和CAE设计是确保赛车性能和操纵性的关键环节。
通过CAD设计和CAE分析,可以实现对转向系统的精确控制和优化,以确保赛车在竞技中取得最佳表现。
巴哈赛车线控转向系统设计

图1转向电机对齿轮齿条转向器驱动2转向机构的设计和函数分析设计2.1设计理念在传统的机械转向系统中,方向盘和转向轮通过传动机构和操舵装置连接在一起,操作不便,且传动比固定,在面对较为复杂的路况时,转型盘所需力矩较大,不利于操安全性较差,这种纯机械结构结构简单、可靠性好,但传动比的变化范围有限,在助力系统转向的作用下,汽车的轻转向问题才被解决。
所以这次选择了线控转向系统为实物转向模板,如图所示,借助其执行机构的转向可变性设计相应的算法,来改变实际操作中转向盘扭角和主轮实际转动角。
通过实验结果表明,车辆在高速时,灵敏度较高,相应的所需的传动比较小;车辆在低速行驶时,灵敏度较小,转复杂路况进行认知并做出判断的反应时间为对转向系统角位移传动比的要求,本次实验数据取中间值。
并且在已知车速v情况下,当横摆角速度增益和侧向加速度增益为定值时,汽车的操纵更加简单方便也便于数据的测量。
并且设置前轮转角不超过其极限值,向传动比的波动范围,其最小值为9.6,这样在保证转向盘在极限转角角度时也更轻便的转向,按照理想传动比的设计规律,需要设置速度分界值来衡量速度的大小,察系统判断车辆转弯时的传动比选择,本次初始速度临界值设为30km/h。
3算法设计及仿真,传动比设计如下:然后分别在速度为20km/h、70km/h、90km/h行仿真。
3.2结果分析实验结果表明,当车辆行驶速度小于了满足低速转向的要求,要求车辆转向系统的角传动比为,且传动比随车速的增加而增大。
中速度行驶时,图2线控转向系统操作模型其数值越小,信息输入部分:获得api接口处的传感器信息std::unique_ptr<SimOne_Data_Gps>pGps= std::make_unique<SimOne_Data_Gps>();信息初始化加载while(1){ SimOneSM::GetGps(0,pGps.get());if(SimOneSM::IsCaseStart()&&(pGps-> timestamp>0)){printf("SimOne Initialized\n");break;}std::unique_ptr<SimOne_Data_Gps>pGps= std::make_unique<SimOne_Data_Gps>(); SSD::SimPoint3D startPt,endPt;if(SimOneSM::GetGps(0,pGps.get())) {startPt.x=pGps->posX;startPt.y=pGps->posY;startPt.z=pGps->posZ;}图4模拟仿真操作地图图3仿真平台操作界面范围内,对于相应的复杂路段也能轻量转向并通过。
大学生方程式赛车转向系统设计方案开题报告

开题报告填写要求1.开题报告(含“文献综述”)作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,经指导教师签署意见及所在专业审查后生效;2.开题报告内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见;3.“文献综述”应按论文的格式成文,并直接书写(或打印)在本开题报告第一栏目内,学生写文献综述的参考文献应不少于15篇(不包括辞典、手册);4.有关年月日等日期的填写,应当按照国标GB/T 7408—2005《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2007年3月15日”或“2007-03-15”。
毕业设计(论文)开题报告1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述:[7]喻凡,林逸.汽车系统动力学[M] .北京:机械工业出版社,2005.[8]Ali Mohammadzadeh, Salim Haidar. Analysis And Design Of Vehicle Suspension System Using MATLAB And SIMULINK[J]. American Society for Engineering Education,2006.[9]喻凡.车辆动力学及其控制[M] .人民交通出版,2004.[10]周名,余卓平,赵治国.动力转向技术的发展[J].轻型汽车技术,2004(10): 9-10 [10]E. Fischer, “Standard multi-body system software in the vehicle development process”, Journal of MultibodyDynamics, V ol. 221 (1), (2007) .[11]刘永.汽车线控转向系统的研究[D] .武汉理工大学,2005.[12]杨胜兵.线控转向系统控制策略研究[D] .武汉理工大学,2008.[13]唐嘉平.AutoCAD2006实用教程(第2版)[M].清华大学出版社,2006.[14]刘善淑.AutoCAD2008工程制图基础教程[M].北京:化学工业出版社,2008.[15]汪文津,陈光泽.CAD/CAM技术在汽车产业上的应用.《天津汽车》2000第3期.毕业设计(论文)开题报告2.本课题要研究或解决的问题和拟采用的研究手段(途径):一、要研究和解决的问题:1.完成转向系统转向系的设计,要求与各子系统配合。
方程式赛车的转向系统(s)

大学生方程式赛车转向系统设计1、概述汽车产品的质量检测具有重大的社会意义。
转向器作为汽车的一个重要部件,对其综合性能进行检测直接关系到人民的生命财产安全。
根据汽车安全性统计,,全世界每年因交通事故死亡的人数超过20万,加之几倍于死者的受伤者以及物质上的损失,其直接或间接的危害是难以估计的。
在我国,因为交通管理技术落后、路况差、车辆性能差,加之各类车辆混合行驶,交通事故时有发生。
近年来,我国交通事故死亡人数居世界前几位,每万辆车平均事故居大国中第一位。
交通事故己成为一个严重的社会问题。
概括交通事故的原因,不外乎人、汽车和环境三个因素。
显而易见,提高汽车的安全性能是减少交通事故的关键措施之一,因此,汽车工业发达的国家都非常重视汽车安全性的研究。
目前汽车工业己成为我国的支柱产业之一,所以,为了提高汽车的质量,保证行驶的安全性,在大力发展我国的汽车工业的同时,这就要求生产厂家对每一批产品必须进行质量检测,而其中转向器是汽车维持驾驶员给定方向稳定行驶能力(即操纵稳定性)的基本保障,所以汽车转向器综合性能试验成了汽车性能测试中的一个重要项目。
因为汽车转向器属于汽车系统中的关键部件,它在汽车系统中占有重要位置,因而它的发展同时也反映了汽车工业的发展,它的规模和质量也成为了衡量汽车工业发展水平的重要标志之一。
近年来随着我过汽车工业的迅猛发展,作为汽车的重要安全部件—汽车转向器的生产水平也有了很大的提高。
在汽车转向器生产行业里,70年代推广循环球转向器,80年代开发和推广了循环球变传动比转向器,到了90年代,驾驶员对汽车转向器性能的要求有了进一步的提高,要求转向更轻便,操纵更灵敏。
随着汽车的高速比和超低压扁轮胎的通用化,过去的采用循环球转向器和循环球变传比转向器只能相对的解决转向轻便性和操纵灵敏性问题,现在虽然转向器以向动力转向发展,但大部分汽车还应用机械型转向器,如何改进转向器的设计,使之更加适合驾驶者,是最重要的,因此还需不断改进。
方程式赛车转向系统设计(转向系统)
毕业设计(论文)题目大学生方程式赛车设计(转向器设计)2013年 5 月30 日方程式赛车转向系统设计(转向系统)摘要赛车转向系的设计对赛车转向行驶性能、操纵稳定性等性能都有较大影响。
在赛车转向系设计过程中首先通过转向系统受力计算和UG草图功能进行运动分析,确定转向系的传动比,确定了方向盘转角输入与轮胎转角输出之间的角传动比为3.67;运用空间机构运动学的原理,采用Matlab软件编制转向梯形断开点的通用优化计算程序,确定汽车转向梯形断开点的最佳位置,从而将悬架导向机构与转向杆系的运动干涉减至最小;然后采用UG运动分析的方法,分析转向系在转向时的运动,求解内外轮转角、拉杆与转向器及转向节臂的传动角、转向器的行程的对应关系,为转向梯形设计及优化提供数据依据。
完成结构设计与优化后我们对转向纵拉杆与横拉杆计算球铰的强度与耐磨性校核以及对一些易断的杆件进行了校核计算,确保赛车有足够的强度与寿命。
完成了对转向轻便性的计算,我们计算了转向轮的转向力矩M,转以及转向盘回转总圈数n,以确认是否达到赛车规则中转向盘上作用力p手所规定的要求以及转向的灵活性与轻便性。
最后我们建立三维模型数据进行预装配,在软件上检查我们设计的转向系是否存在干涉等现象以及检查我们的转向系是否满足我们的设计要求,对我们的设计进行改进。
关键词:赛车,转向,UG,转向梯形,运动分析,齿轮齿条The design of Formula front and rear suspension andsteering system (steering system)ABSTRACTSteering System Design of a car has a significant impact of driving performance, steering stability. In the car design process, first through the steering force calculations and the UG kinetic analysis we determine the ratio of steering system, the relationship between the wheel angle input and output; The principles of spatial mechanism kinetics and a related optimization program by using Matlab are applied to the calculation of the spatial motion of the ackerman steering linkage. By using the method,the interference between suspension guiding mechanism and steering linkage is minimized; then UG kinetic analysis is used to analysis the motion of steering system when turning and calculating the corresponding relation between the turning angle of inside and outside wheels, the transmission angle of steering linkage and steering box or steering linkage and track-rod, and steering box stroke. And it provides a theoretical basis for designing and optimizing the steering trapezoidal mechanism.After the work we calculate the ball joints tie rod strength and wear resistance, and some calculations was made on some dangerous bars, to ensure the car has enough strength and life. After carrying out a complete calculation of the portability, we calculate the torque of the wheel, the force of steering wheel on the hands and the total number of turns , to meet the requirements in the car rules. Finally, we set up pre-assembled three-dimensional model data, checking the steering we designed whether there is interference phenomena and to examine whether our steering meet our design requirements, to improve our design.KEY WORDS:FSAE,UG, steering trapezoid, motion analysis, rack and pinion目录第一章绪论 (1)§1.1 Formula SAE 概述 (1)§1.1.1 背景 (1)§1.1.2 发展和现状 (2)§1.2 中国FSAE发展概况 (2)§1.3 任务和目标 (3)第二章转向系设计方案分析 (4)§2.1 赛车转向系概述 (4)§2.2 转向系的基本构成 (4)§2.3 转向操纵机构 (4)§2.4 转向传动机构 (6)§2.5 机械式转向器方案分析 (6)§2.5.1 齿轮齿条式转向器 (6)§2.5.2 其他形式的转向器 (8)§2.5.3 转向器形式的选择 (9)§2.6 赛车转向系统传动比分析 (9)§2.7 转向梯形机构的分析与选择 (10)§2.7.1 转向梯形机构的选择 (10)§2.7.2 断开式转向梯形参数的确定 (10)§2.7.3 转向系内外轮转角的关系的确定 (12)§2.7.4 MATLAB内外轮转角关系曲线部分程序 (14)第三章转向系主要性能参数 (16)§3.1 转向器的效率 (16)§3.1.1 转向器的正效率η+ (16)§3.1.2 转向器的逆效率η- (17)§3.2 传动比的变化特性 (17)§3.2.1 转向系传动比 (17)§3.2.2 力传动比与转向系角传动比的关系 (18)§3.2.3 转向系的角传动比wo i (19)§3.2.4 转向器角传动比及其变化规律 (19)§3.3 转向器传动副的传动间隙Δt (20)§3.3.1 转向器传动间隙特性 (20)§3.3.2如何获得传动间隙特性 (21)§3.4 转向系传动比的确定 (22)第四章齿轮齿条式转向器设计与计算 (23)§4.1 转向系计算载荷的确定 (23)§4.1.1 原地转向阻力矩MR的计算 (23)§4.1.2 作用在转向盘上的手力Fh (23)§4.1.3转向横拉杆直径的确定 (24)§4.1.4初步估算主动齿轮轴的直径 (24)§4.2 齿轮齿条式转向器的设计 (25)§4.2.1 齿条的设计 (25)§4.2.2 齿轮的设计 (25)§4.2.3 转向横拉杆及其端部的设计 (25)§4.2.4齿条调整 (26)§4.2.5转向传动比 (27)§4.3 齿轮轴和齿条的设计计算 (28)§4.3.1 选择齿轮材料、热处理方式及计算许用应力 (28)§4.3.2 初步确定齿轮的基本参数和主要尺寸 (29)§4.3.3确定齿轮传动主要参数和几何尺寸 (30)§4.4 齿轮齿条转向器转向横拉杆的需要全套设计请联系Q Q1537693694运动分析 (31)§4.5 齿轮齿条传动受力分析 (32)§4.6 齿轮轴的强度校核 (32)§4.6.1轴的受力分析 (32)§4.6.2判断危险剖面 (33)§4.6.3轴的弯扭合成强度校核 (33)§4.6.4轴的疲劳强度安全系数校核 (33)第五章转向梯形的优化设计 (36)§5.1 目标函数的建立 (36)§5.2 设计变量与约束条件 (37)§5.2.1 保证梯形臂不与车轮上的零部件发生干涉 (37)§5.2.2保证有足够的齿条行程来实现要求的最大转角 (38)§5.2.3保证有足够大的传动角α (38)第六章基于UG运动仿真的转向梯形设计与优化 (41)§6.1 建立UG三维模型 (41)§6.2 基于UG工程图模块的转向机动图 (42)§6.3 UG模型以及基于UG高级仿真的零部件校核 (42)§6.4 UG装配模型检查干涉问题 (43)第七章结论 (44)参考文献 (45)致谢 (46)第一章绪论§1.1 Formula SAE 概述§1.1.1 背景Formula SAE 赛事由美国汽车工程师协会(the Society of Automotive Engineers 简称SAE)主办。
FSAE赛车转向系统CAD与CAE设计

FSAE赛车转向系统CAD与CAE设计FSAE(Formula SAE)是一项学生工程竞赛,由学生设计和建造一款Formula-style赛车,以参加一系列国际比赛。
FSAE赛车需要在各种挑战环境下运行,并需要具有高性能转向系统,以确保车辆在赛道上的准确操控。
因此,对FSAE赛车转向系统的CAD(计算机辅助设计)与CAE(计算机辅助工程)设计至关重要。
转向系统是FSAE赛车中至关重要的一个组成部分,直接影响到车辆的操控性能和安全性。
一个优秀的转向系统需要具有以下特点:具有良好的操控性和稳定性、轻量化设计、耐用性强、尽可能减小功耗和能耗等。
在进行CAD与CAE设计时,需要充分考虑这些特点,以确保转向系统的设计符合赛车的需求。
在进行CAD设计时,工程师们可以利用各种CAD软件,如SolidWorks、AutoCAD等,对转向系统进行三维建模。
在建模过程中,需要考虑各个零部件的尺寸、间隙以及安装位置等因素,并确保各个零部件之间的匹配性和协调性。
此外,CAD设计还可以帮助工程师们进行各种虚拟分析,如有限元分析(FEA)、动力学模拟等,以验证转向系统的强度和稳定性。
在进行CAE设计时,工程师们可以利用各种CAE软件,如ANSYS、ADAMS等,对转向系统进行模拟分析。
通过CAE分析,工程师们可以评估转向系统在各种工况下的性能表现,如转向灵活性、阻尼效果、响应时间等。
通过对模拟结果的分析,可以发现并解决转向系统中存在的问题,优化设计方案,提高系统的性能。
在CAD与CAE设计中,需要特别注意以下几个方面:1.转向系统的优化设计:在CAD设计中,需要充分考虑各个零部件的结构设计、材料选择和加工工艺等因素,以保证转向系统的性能表现。
在CAE设计中,需要对转向系统进行各种模拟分析,以找出系统存在的问题,并提出相应的解决方案。
2.转向系统的强度和稳定性:在CAD设计中,需要对各个零部件进行强度分析,以确保系统在高速运行时不会发生破裂或变形。
F1转向系设计
目录摘要 (1)Abstract (2)1 绪论 (3)1.1 前言 (3)1.2 设计思路 (3)2 汽车转向系统概述 (4)2.1 转向系的主要要求 (4)2.2 转向系统分类 (5)2.3 转向系布置设计 (5)3 转向器的结构型式及选择 (6)3.1 循环球式转向器 (6)3.2齿轮齿条式转向器 (6)3.2.1 材料的选择 (7)3.2.2 齿轮齿条式转向器优缺点 (7)3.2.3 输入输出形式的选择 (7)3.2.4 齿轮啮合方式的选择 (10)3.2.5 齿条断面形状 (11)3.2.6 齿轮齿条式转向器和转向梯形相对位置 (11)4 转向操纵机构 (12)5 转向传动机构 (13)6 转向梯形的优化设计 (13)6.1 转向梯形结构的选择 (13)6.2 断开点位置的确定 (15)6. 3 转向梯形的设计优化 (16)6.4 用解析法求内、外轮转角关系 (17)6.5 转向传动机构的优化设计 (19)6.5.1 目标函数的建立 (19)6.5.2 设计变量与约束条件 (20)6.5.3 转向梯形的计算 (23)6.5.4 优化结论 (27)7 转向器参数设计 (28)7.1 原地转向力矩及转向器手力计算 (28)7.2 转向器角传动比及力传动比 (29)8 齿轮齿条参数设计及校核 (30)8.1 齿轮精度等级、材料及参数的选择 (30)8.2齿轮几何尺寸确定 (30)8.3齿根弯曲疲劳强度计算 (31)8.3.1 齿轮的齿根弯曲强度校核 (31)8.3.2 齿面接触疲劳强度校核 (31)8.4 齿条参数的设计 (32)结论 (33)致谢 (33)参考文献 (34)F1转向系设计摘要:转向系统在赛车中占有重要的地位,转向系统性能的好坏直接影响到汽车行驶的安全性、操纵稳定性和驾驶舒适性。
本课题首先通过分析转向系的功能要求,结合转向系统的布置设计,比较各类型的转向器的优缺点,选用齿轮齿条式转向器。
基于adams及ansys的bsc赛车转向系统优化设计

1 BSC赛车转向系统
1.1 BSC赛车转向系统设计目标 1)在后轮没有差速装置作用下,尽可能减小
关键词 转向系统;Baja赛车;仿真分析;阿克曼转向
中图分类号 TH122
文献标志码 A
doi:10.3969/j.issn,1672-4550.2019.05.002
Optimization of a BSC Racing Car s Steering Systeem Based on ADAMS and ANSYS
HAN Xiaoqiang, SHEN Yabin, MA Li and WANG Chao (School of Automotive Engineering t Dalian University of Technology, Dalian 116024, China)
Abstract In recent years, college students continue to develop motor sports. In order to improve the stability of BSC car racing and meet the requirements of structural lightweight, the design goals and design flow of steering system are established according to the racing rules. Hard point coordinates of 3D model in UG are used with Adams / Car module to establish simplified kinetic model. The influence of each system parameter on racing steering is analyzed. The performance parameters of steering system are designed and calculated. The structure of steering system is simplified by ANSYS statistical analysis. Lastly, the optimized results are used in BSC racing design. This paper presents a good reference for the same type of front suspension steering system design, shortens the de sign cycle, and promotes Baja event development.
巴哈赛车转向系统设计
AUTOMOBILE DESIGN | 汽车设计巴哈赛车转向系统设计胡延明 王健儿 贾琼黄河交通学院 河南省焦作市 454950摘 要: 大学生巴哈比赛是一项由汽车工程学会主办以大学生群体为主的赛车竞赛。
要求在规定时间内每支车队独立制造出一辆具有良好的加速性能、四轮能同时抱死、操控性能足够稳定等特点以成功通过赛事里的每一项比赛的赛车。
转向系统设计是巴哈赛车设计中的一项非常重要设计,其作用是保障在改变行驶方向的同时保证车辆的正常运行,并保证在产生转向时转向轮之间的转角协调.本文简要分析了转向系统的作用、基本构成,为了保证赛车具有良好的机动性能,确定符合巴哈赛车的最小转弯半径,最大外轮转角以及转动系统的传动比;其次根据赛车所需转向关系以及实际转向内外轮转角关系确定转向梯形结构参数并验证其是否满足要求,利用前悬架参数采用三心定理确定转向梯形断开点,确定转向杆系的空间布局;最后确定各结构件参数完成catia三维模型建立装配。
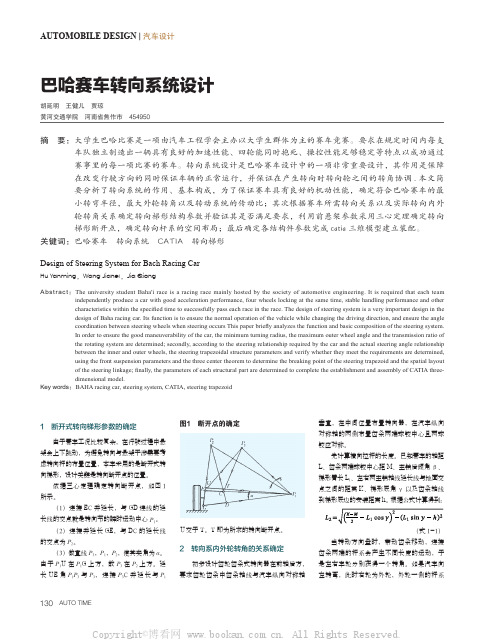
关键词:巴哈赛车 转向系统 CATIA 转向梯形1 断开式转向梯形参数的确定由于赛车工况比较复杂,在行驶过程中悬架会上下跳动,为避免转向与悬架干涉需要考虑转向杆的布置位置,本车采用的是断开式转向梯形,设计关键是转向断开点的位置。
依据三心定理确定转向断开点,如图1所示。
(1)连接EC并延长,与GD连线的延长线的交点就是转向节的瞬时运动中心P1。
(2)连接并延长GE,与DC的延长线的交点为P2。
(3)做直线P3,P1,P2,使其夹角为α。
由于P1U在P1G上方,故P3在P2上方。
延长UE角P1P3与P3,连接P3C并延长与P1U交于T。
T即为所求的转向断开点。
2 转向系内外轮转角的关系确定初步设计齿轮齿条式转向器在前轴后方,要求齿轮齿条中齿条轴线与汽车纵向对称轴垂直,在中间位置布置转向器,在汽车纵向对称轴的两侧布置齿条两端球铰中心且两球铰应对称。
先计算横向拉杆的长度。
已知赛车的轴距L、齿条两端球铰中心距M、主销后倾角β、梯形臂长L1、左右两主销轴线延长线与地面交点之间的距离K、梯形底角γ以及齿条轴线到梯形底边的安装距离h。
赛车转向系统的设计方案
赛车转向系统的设计方案李宏曰转向系统的主要任务是:1.设计合适的断开点以使悬架跳动对转向的影响尽可能小。
2. 设计合适的转向梯形以使内外转角尽可能符合理论阿克曼曲线。
设计过程如下:1. 确定转向机的布置形式前置,下置,断开式梯形前置。
2. 转向系角传动比的确定由最小转弯半径确定了最大外轮转角,根据最大外轮转角与方向盘转角的关系初步确定转向系角传动比为4:1,转向系角传动比为转向器传动比与转向机构传动比的乘积,转向传动机构角传动比,除用iw ' =d 3 p/d 3 k表示以外,还可以近似地用转向节臂臂长L2与摇臂臂长LI之比来表示,即iw ' =d 3 p/d3 ki疋L2 / LI o现代汽车结构中,L2与L1的比值大约在0. 85〜1. 1之间,取比值为1,则转向器角传动比为4: 1.3. 由转向器角传动比初步确定转向节臂L1的值。
齿轮齿条装置把方向盘的转动转换成横拉杆内球头的直线运动。
计算传动比时需用到齿条的c-factor和转向节臂长度(外球头到主销轴的距离)。
C-factor=齿条行程(in.)/小齿轮转过360°一般的齿条有"1-7/8-in ch齿条”或者"2-i nch齿条” ;c-factor这个尺寸是方向盘转一圈的齿条行程。
一旦齿条的c-factor知道,转向传动比可近似用下式计算:i=arcsi n(c-factor/L)/360L—转向节臂长度本式中长度单位为英寸,角度单位为度。
系统中的压力角越小这个近似值越接近,也就是说在俯视图中横拉杆几乎要与转向节臂垂直。
如果角度比较大的话,那拉杆的布置也会影响传动比。
C-factor 取70, i 为4,计算得L 为76.67mm。
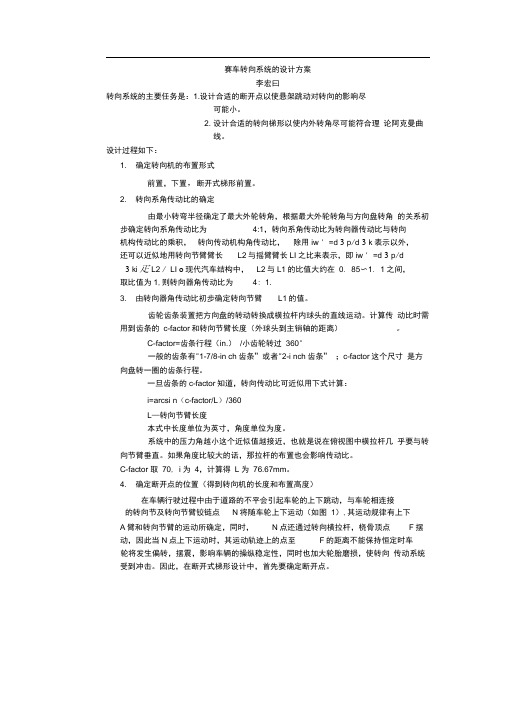
4. 确定断开点的位置(得到转向机的长度和布置高度)在车辆行驶过程中由于道路的不平会引起车轮的上下跳动,与车轮相连接的转向节及转向节臂铰链点N将随车轮上下运动(如图1),其运动规律有上下A臂和转向节臂的运动所确定,同时,N点还通过转向横拉杆,桡骨顶点F摆动,因此当N点上下运动时,其运动轨迹上的点至F的距离不能保持恒定时车轮将发生偏转,摆震,影响车辆的操纵稳定性,同时也加大轮胎磨损,使转向传动系统受到冲击。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
赛车转向系统的设计方案
李宏昌
转向系统的主要任务是:1.设计合适的断开点以使悬架跳动对转向的影响尽
可能小。
2.设计合适的转向梯形以使内外转角尽可能符合理
论阿克曼曲线。
设计过程如下:
1.确定转向机的布置形式
前置,下置,断开式梯形前置。
2.转向系角传动比的确定
由最小转弯半径确定了最大外轮转角,根据最大外轮转角与方向盘转角的关系初步确定转向系角传动比为4:1,转向系角传动比为转向器传动比与转向机构传动比的乘积,转向传动机构角传动比,除用iw′=dβp/dβk表示以外,还可以近似地用转向节臂臂长L2与摇臂臂长Ll之比来表示,即iw′=dβp/d βki≈L2/Ll 。
现代汽车结构中,L2与L1的比值大约在0.85~1.1之间,取比值为1,则转向器角传动比为4:1.
3.由转向器角传动比初步确定转向节臂L1的值。
齿轮齿条装置把方向盘的转动转换成横拉杆内球头的直线运动。
计算传动比时需用到齿条的c-factor和转向节臂长度(外球头到主销轴的距离)。
C-factor=齿条行程(in.)/小齿轮转过360°
一般的齿条有“1-7/8-inch 齿条”或者“2-inch 齿条”;c-factor这个尺寸是方向盘转一圈的齿条行程。
一旦齿条的c-factor知道,转向传动比可近似用下式计算:
i=arcsin(c-factor/L)/360
L—转向节臂长度
本式中长度单位为英寸,角度单位为度。
系统中的压力角越小这个近似值越接近,也就是说在俯视图中横拉杆几乎要与转向节臂垂直。
如果角度比较大的话,那拉杆的布置也会影响传动比。
C-factor取70,i为4,计算得L为76.67mm。
4.确定断开点的位置(得到转向机的长度和布置高度)
在车辆行驶过程中由于道路的不平会引起车轮的上下跳动,与车轮相连接的转向节及转向节臂铰链点N将随车轮上下运动(如图1),其运动规律有上下A臂和转向节臂的运动所确定,同时,N点还通过转向横拉杆,桡骨顶点F摆动,因此当N点上下运动时,其运动轨迹上的点至F的距离不能保持恒定时车轮将发生偏转,摆震,影响车辆的操纵稳定性,同时也加大轮胎磨损,使转向传动系统受到冲击。
因此,在断开式梯形设计中,首先要确定断开点。
用图解法确定断开点位置(如图2)。
采用上下止点法确定断开点位置,当选假的导向机构和转向节臂作为一个刚体跳至上止点时,图中A,B,C三点分别运动到A1,B1,C1位置;跳至下止点时,则分别运动到A2,B2,C2,在上止点时,B1,O1连线的延长线与A1,O1连线的延长线相交于O3,此点即是悬架在上止点时的瞬时摆动中心,为了保证运动协调,C点的摆动中心应在C1,O3的连线上,同理,当悬架落至下止点时,得到瞬时摆动中心O4,则C点的摆动中心应在C2,O4的连线上,那么上下止点时C点的瞬时摆动中心取在C1O3和C2O4两直线的延长线交点O’上。
当A,B,C三点分别跳至上下止点的60%时,用上述方法得到C点的瞬时摆动中心O’’,同样C2O’’=C1O’’,O’与O’’两点连线的中点为Oa,Oa点即为断开点。
对于赛车,取L1为76.67mm,梯形底角取110度(转向机前置时为满足正确阿克曼转向关系需取梯形底角为钝角),通过作图后得到转向节高度大致在距主销下A臂球销连接点之下10mm,通过作图法得到转向机长度M大致为500mm,转向机高度为距车架前地面30mm的位置,当断开点满足这个尺寸时,悬架跳动对转向的影响较小。
5.通过MATLAB优化设计转向梯形内外轮转角关系。
Matlab程序如下:
sita20=0.0001;
for i=1:50
D2R=pi/180;
sita21=atan(1/(1/tan(sita20)+1196/1650));
angles1(i,1)=sita20/D2R;
angles1(i,2)=sita21/D2R;
sita20=sita20+D2R;
end
plot(angles1(:,1),angles1(:,2),'r-')
axis([0 30 0 30]);
hold on
r=120*pi/180;
h=100;
k=1196;
M=500;
sita0=0;
L1=76.67;
L2=(((k-M)/2-L1*cos(r))^2+(L1*sin(r)-h)^2)^0.5;
D2R=pi/180;
for i=1:50
s=(k-M)/2-L1*cos(r+sita0)-(L2^2-(L1*sin(r+sita0)-h)^2)^0.5;
a=r;
b=atan(2*h/(k-M+2*s));
c=L1^2+((k-M)/2+s)^2+h^2-L2^2;
d=2*L1*(((k-M)/2+s)^2+h^2)^0.5;
e=c/d;
sita1=a-b-acos(e);
angles(i,1)=sita0/D2R;
angles(i,2)=sita1/D2R;
sita0=sita0+D2R;
end
plot(angles(:,1),angles(:,2))
grid;
axis([0 30 0 30]);
xlabel('内轮转角(度)')
ylabel('外轮转角(度)')
上图为得到的实际内外轮转角曲线(蓝线)与理想阿克曼转角曲线(红线),在最大转角时,实际转角与理论转角的差值为最大值2-3度,属于可接受范围。