基于51单片机蓝牙模块传输数据毕业设计作品
基于51单片机蓝牙模块传输数据毕业设计作品
基于51单片机蓝牙模块传输数据毕业设计作品在本论文中,我们基于51单片机和蓝牙模块设计了一个数据传输的毕业设计作品。
蓝牙是一种无线通信技术,广泛应用于各种设备之间的数据传输。
本设计作品旨在通过蓝牙模块实现51单片机与其他设备之间的数据交互和传输。
首先,我们介绍了设计的背景和意义。
随着科技的不断进步和物联网的兴起,各种设备之间的互联互通已成为一种趋势,这对数据传输的可靠性和灵活性提出了更高的要求。
因此,设计一个基于51单片机和蓝牙模块的数据传输系统,以提高数据传输的效率和便利性,具有重要意义。
接下来,我们详细介绍了设计方案和实现方法。
首先,我们选择了51单片机作为硬件平台,因为它具有广泛的应用基础和丰富的资源。
然后,我们选择了蓝牙模块作为无线通信模块,因为它能够提供稳定可靠的数据传输通道。
蓝牙模块与51单片机通过串口进行连接,通过串口通信实现数据的发送和接收。
在软件设计方面,我们采用了嵌入式C语言编程。
首先,我们通过51单片机的GPIO口和中断机制实现了对蓝牙模块的控制和数据传输。
然后,我们设计了相应的数据传输协议,以实现数据的可靠传输和解析。
最后,我们开发了用户界面,使用户能够方便地操作和管理数据传输。
在实验和测试中,我们对设计的功能和性能进行了验证。
首先,我们测试了数据传输的可靠性和稳定性,并通过数据验证和传输速度测试得到了令人满意的结果。
然后,我们对系统的功耗和实时性进行了测试,并对数据的完整性和安全性进行了评估。
最后,我们与其他类似的作品进行了比较,证明了该设计在功能和性能上的优势。
在论文的最后部分,我们总结了论文的主要内容和贡献,并对未来的研究方向进行了展望。
总体而言,本设计作品基于51单片机和蓝牙模块实现了数据传输的毕业设计,具有一定的理论和实践意义。
通过该设计,我们能够实现设备之间的数据交互和传输,提高数据传输的效率和便利性,为相关领域的研究和应用提供有益的参考。
基于51单片机的蓝牙传输

简易无线数据收发设计赛项报告小组成员:指导老师:日期:二〇一五年五月三十一日3系统软件设计 (11)3-1源程序 (11)4系统性能分析 (16)4-1优缺点 (16)4-2改进方向 (16)1方案设定1-1电路设计框图图HC-050~9)22-1主控制模块图6-1STC89C52资料:STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有8K在系统可编程Flash 存储器。
STC89C52使用经典的MCS-51内核,但做了很多的改进使得芯片具有传统51单片机不具备的功能。
在单芯片上,拥有灵巧的8位CPU和在系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
具有以下标准功能:8k字节Flash,512字节RAM,32位I/O口线,看门狗定时器,内置4KBEEPROM,MAX810复位电路,3个16位定时器/计数器,4个外部中断,一个7向量4级中断结构(兼容传统51的5向量2级中断结构),全双工串行口。
另外STC89C52可降至0Hz静态逻辑操作,支持2种软件可选择节电模式。
空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。
掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。
最高运作频率35MHz,6T/12T可选。
参数:1.增强型8051单片机,6时钟/机器周期和12时钟/机器周期可以任意选择,指令代码完全兼容传统8051.[2]2.工作电压:5.5V~3.3V(5V单片机)/3.8V~2.0V(3V单片机)3.工作频率范围:0~40MHz,相当于普通8051的0~80MHz,实际工作频率可达48MHz4.5.6.通用7.ISP(8.具有9.共310.11.12.13.PDIP2-2ATHC-05)当的动态转换。
串口模块用到的引脚定义:1、PIO8连接LED,指示模块工作状态,模块上电后闪烁,不同的状态闪烁间隔不同。
基于51单片机的蓝牙控制
基于51单片机的蓝牙控制摘要随着科技的进步与现代产业的飞速发展,对控制系统的发展也提出了越来越高的要求,非接触控制、中远程通信正在扮演这越来越重要的角色,所以单片机的中远程通信的意义也愈发重要。
作为一名工科生,加强对这方面的学习是很有必要的。
基于AT89C51单片机与HC-08蓝牙模块通信的基础,我们设计了能够实现在手机模拟串口APP的客户端上进行温度监视与控制的系统。
该系统主要由蓝牙通信模块,灯光模拟加热电路,单片机控制电路,基于DS18B20的温度监视电路等部分组成。
画出了系统电路原理图,进行了软件设计,给出了系统流程图,并编写了系统程序。
最后在进行系统仿真的基础上进行了实物制作,实物调试结果表明,所设计的系统能够满足要求。
本系统具有成本低,安全实用,80米左右通信等特点。
关键词:AT89C51;HC-08蓝牙;DS18B20;LCD显示屏;一、概述 (3)1.1 课程考核目的 (3)1.2 设计任务及要求 (3)1.3设计需要的相关知识 (3)二、总体设计方案与说明 (4)2.1系统总体设计方案 (4)2.2系统的技术指标 (4)2.3 AT89C51单片机的串口 (4)2.3.1 概念 (4)2.3.2 串行口结构 (5)2.3.3 特殊功能寄存器PCON (6)2.3.4串行口的4种工作方式 (7)三、系统硬件部分设计 (9)3.1 Protel DXP电路原理图 (9)3.2 LCD显示电路 (10)3.2.1 LCD 1602引脚 (10)3.2.2.LCD1602字符的显示及命令 (10)3.3 HC-08蓝牙模块电路 (11)3.3.1 模块简介 (12)3.3.2 HC-08蓝牙引脚定义 (12)3.4 温度检测电路 (13)3.4.1 DS18B20模块简介 (13)3.4.2 引脚功能 (13)3.4.3 编程方式 (13)3.5 模拟加热电路(本设计中以LED灯和继电器模拟加热电路)(14)四、系统软件部分设计 (15)4.1系统软件流程图 (15)4.2 程序清单 (16)五、系统仿真及实物制作 (16)5.1仿真软件........................................................................................... 错误!未定义书签。
基于某51单片机蓝牙模块传输大数据毕业设计作品
基于某51单片机蓝牙模块传输大数据毕业设计作品摘要:随着信息技术的迅猛发展,人们对数据的传输和处理的要求也越来越高。
蓝牙技术作为一种无线通信技术,广泛应用于各个领域。
本篇毕业设计作品基于51单片机蓝牙模块,主要研究如何实现大数据传输,并设计了一个相应的系统。
关键词:51单片机;蓝牙模块;大数据传输;系统设计1.引言随着科技的发展,数据的规模越来越大,以及处理速度的要求也越来越高。
蓝牙技术作为一种低功耗、低成本的无线通信技术,在各个行业得到了广泛应用。
本毕业设计作品基于51单片机蓝牙模块,旨在研究如何实现大数据的传输。
2.设计方案2.1硬件设计本设计使用了51单片机和一个蓝牙模块。
51单片机为中央处理器,负责控制数据的接收和发送,同时与蓝牙模块进行通信。
蓝牙模块为无线通信模块,负责将数据通过无线信号传输到外部设备。
2.2软件设计软件设计主要包括蓝牙通信协议的设计和数据的传输处理。
首先需要设计一个蓝牙通信协议,用于蓝牙模块与外部设备的通信。
然后设计数据传输处理算法,将大数据进行分组传输,并确保数据的完整性和准确性。
3.实现步骤3.1硬件连接首先,将蓝牙模块与51单片机进行连接。
根据硬件接口定义,将蓝牙模块的TX和RX引脚分别连接到51单片机的RX和TX引脚。
此外,还需要连接供电电源。
3.2软件编程首先,根据蓝牙模块的通信协议,设计相应的通信代码。
通过串口通信方式将数据发送到蓝牙模块,然后由蓝牙模块进行无线传输。
同时,还需编写相应的接收代码,接收外部设备发送的数据。
然后,设计数据传输处理算法。
由于大数据量可能超过蓝牙模块的传输能力,需要将大数据进行分组传输。
设计相应的算法,将大数据分成多个小块进行传输,并确保每个小块的完整性和排序准确性。
4.实验结果与分析经过实验测试,本设计能够正常进行大数据的传输。
通过蓝牙模块,数据可以无线传输到外部设备。
同时,由于添加了数据传输处理算法,大数据可以按照指定的分组规则进行传输,确保数据的完整性和准确性。
基于51单片机及蓝牙模块通信的动态密码锁设计

基于51单片机及蓝牙模块通信的动态密码锁设计在当今信息安全日益受到重视的社会背景下,动态密码锁成为了一种备受青睐的安全设备。
本文将探讨。
一、引言随着信息技术的不断发展和普及,人们对于信息安全的重视程度越来越高。
在日常生活中,密码锁被广泛应用于各种安全领域,从手机解锁到电子银行密码,密码锁无处不在。
然而,传统的固定密码方式存在着易被猜解、被盗用的风险。
为了提高信息安全性,动态密码锁技术应运而生。
基于51单片机及蓝牙模块通信的动态密码锁设计就是其中一种应用。
二、动态密码锁的发展历程动态密码锁起源于传统密码锁的不足之处。
传统密码锁存在密码易被盗用、无法实现远程授权等问题,这些问题催生了动态密码锁技术的发展。
最早的动态密码锁是基于时间同步算法生成密码,用户需要在规定的时间内输入密码才能解锁。
随着技术的发展,越来越多的动态密码锁采用了基于51单片机及蓝牙模块通信的设计,实现了更加安全、便捷的密码动态生成和验证。
三、基于51单片机及蓝牙模块通信的动态密码锁设计原理基于51单片机及蓝牙模块通信的动态密码锁设计主要包括硬件和软件两个方面。
在硬件方面,动态密码锁需要使用51单片机作为控制核心,通过蓝牙模块实现与手机的通信。
在软件方面,需要编写相应的密码生成算法和验证算法,实现密码的动态生成和验证。
四、51单片机在动态密码锁设计中的应用51单片机作为一种常用的嵌入式开发平台,被广泛应用于动态密码锁设计中。
其低成本、易编程、稳定性好等特点使其成为动态密码锁设计的理想选择。
在动态密码锁设计中,51单片机负责控制密码生成和验证的整个流程,保障密码的安全性和可靠性。
五、蓝牙模块在动态密码锁设计中的作用蓝牙模块作为无线通信模块,在动态密码锁设计中起到了至关重要的作用。
通过蓝牙模块,动态密码锁可以与手机进行通信,实现远程授权、密码传输等功能。
同时,蓝牙模块还可以提供数据加密传输的功能,保障密码在传输过程中的安全性。
六、动态密码生成算法的设计动态密码生成算法是动态密码锁设计中的核心部分。
基于51单片机蓝牙模块传输数据毕业设计作品

基于51单片机的蓝牙模块数据传输设计(修订版)摘要本设计以STC89C52单片机为控制核心。
经蓝牙模块实现无线连接,发送数据和接收数据,通过LCD1602显示接收的数据和编辑发送的数据,两个单片机通过部程序实现实时接收、发送和显示,从而完成相关要求。
1方案设定1-1电路设计框图图4-1注:由于STC89C52芯片串口寄存器的容量限制,每次收发只能一个字节。
1-2功能叙述本作品通过HC-05主从机一体蓝牙模块实现与带蓝牙的设备先通过OPP蓝牙协议来实现配对连接,实现连接配对可通过电路板上的数字按键来实现输入,经STC89C52单片机处理后通过HC-05蓝牙无线传送到另一方单片机上,通过STC89C52单片机处理后可在LCD1602液晶显示所接受到的数据!1-3使用说明在接通电源前,先把蓝牙模块插到单片机上,紧接着启动电源。
观察蓝牙模块的指示灯,等待两个单片机之间的连接匹配,待指示灯出现双闪后就匹配连接成功。
接下来可根据自己想要发送数据在单片机的按键区域(0~9)按下,按下后显示屏便出现你所要发送的数据,确认无误之后就按下单片机上的发送按钮即马上发送到另一方单片机上(两个单片机可以互相发送)!2系统硬件设计2-1主控制模块图6-12-2蓝牙收发模块图8-1 2-3液晶显示模块图9-1 LCD1602资料:1602采用标准的16脚接口,其中:第1脚:GND为电源地第2脚:VCC接5V电源正极第3脚:V0为液晶显示器对比度调整端,接正电源时对比度最弱,接地电源时对比度最高(对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度)。
第4脚:RS为寄存器选择,高电平1时选择数据寄存器、低电平0时选择指令寄存器。
第5脚:RW为读写信号线,高电平(1)时进行读操作,低电平(0)时进行写操作。
第6脚:E(或EN)端为使能(enable)端,高电平(1)时读取信息,负跳变时执行指令。
第7~14脚:D0~D7为8位双向数据端。
基于某51单片机蓝牙模块传输大数据毕业设计作品

基于某51单片机蓝牙模块传输大数据毕业设计作品毕业设计题目:基于51单片机蓝牙模块传输大数据摘要:随着移动互联网的快速发展,人们对于数据传输的需求越来越大,传统的有线传输已经无法满足大数据传输的要求。
蓝牙技术作为一种无线传输技术,具有低功耗、简单易用等优点,被广泛应用于手机、电脑等终端设备。
本毕业设计通过使用51单片机和蓝牙模块实现大数据的无线传输,对设计制作过程进行了详细描述,并对系统性能进行了测试和评价。
关键词:蓝牙模块;51单片机;大数据传输一、引言近年来,随着移动互联网和物联网的快速发展,大数据正逐渐成为人们工作和生活中的一部分。
大数据的传输和存储对于提高信息化系统的性能至关重要。
传统的有线传输方式不仅使用起来不方便,而且在传输速度上也存在一定的瓶颈。
因此,无线传输技术被广泛应用于各个领域。
蓝牙技术作为一种无线传输技术,以其简单易用、低功耗等优点,被广泛应用于手机、电脑等终端设备。
二、设计目标本毕业设计的目标是利用51单片机和蓝牙模块实现大数据的无线传输。
具体设计要求包括:1.设计一套可靠、高效的数据传输协议,保证大数据的完整性和准确性;2.设计一套简单易用的用户界面,方便用户进行操作和监控;3.对设计进行测试和评价,分析系统性能。
三、设计方法本设计采用了51单片机和蓝牙模块来实现大数据的无线传输。
51单片机具有较高的性能和丰富的外设接口,可以方便地实现数据的采集和处理。
蓝牙模块作为无线传输的核心部件,可以提供稳定的传输环境。
具体设计步骤如下:1.硬件设计:根据实际需求,设计合适的电路板布局和外设接口,保证数据的高效操作和传输。
2.软件设计:根据设备的特点,编写相应的驱动程序和应用程序,实现数据的采集、处理和传输。
3.系统测试:对设计的系统进行全面测试,包括功能测试、性能测试和可靠性测试等。
四、设计实施根据以上设计方法,我完成了该毕业设计的实施。
具体实施过程包括:1.硬件实施:根据硬件设计方案,绘制电路板图,并进行焊接和组装。
单片机与蓝牙模块通信技术研究与案例分析

单片机与蓝牙模块通信技术研究与案例分析技术的快速发展使得蓝牙模块在单片机中的应用变得越来越广泛。
蓝牙作为一种无线通信技术,具有低功耗、短距离、高传输速率等特点,非常适合于单片机与外部设备进行通信。
本文将对单片机与蓝牙模块通信技术进行研究,并通过具体的案例分析展示其应用。
一、单片机与蓝牙模块通信原理单片机与蓝牙模块通信主要是通过串口通信来实现的。
现场可编程门阵列(FPGA)是一种半导体器件,可根据用户的需求进行编程,并实现特定的功能。
FPGA中的硬件描述语言可以对芯片内部的逻辑电路进行编程,实现与单片机的通信。
通过在单片机中编写相应的代码,我们可以实现与FPGA的通信,并通过蓝牙模块将数据传输到远程设备。
二、单片机与蓝牙模块通信技术的研究1. 通信协议在单片机与蓝牙模块之间进行通信时,需要选择合适的通信协议。
常用的通信协议有UART、SPI和I2C等。
UART通信协议是最常见的一种,其发送和接收数据的速度可以通过波特率进行调整。
SPI通信协议用于通信速度要求较高的场景,它需要使用多个引脚进行通信。
I2C通信协议适用于通信双方芯片引脚有限的情况,可以通过两根线进行数据传输。
2. 蓝牙模块选择不同的项目需要选择合适的蓝牙模块。
蓝牙模块有很多种类型,包括经典蓝牙模块和低功耗蓝牙模块。
经典蓝牙模块适用于音频传输、数据传输等场景,而低功耗蓝牙模块适用于需要长时间待机的场景。
根据项目需求,选择合适的蓝牙模块很重要。
3. 通信距离蓝牙模块的通信距离决定了单片机与外部设备之间的数据传输范围。
一般来说,蓝牙模块的通信距离在几十米以内,如果需要更远的通信距离,可以采用信号增强器或者选择其他的通信方式。
三、单片机与蓝牙模块通信案例分析以智能家居系统为例,进行单片机与蓝牙模块通信的案例分析。
在智能家居系统中,单片机通过蓝牙模块与用户的手机进行通信,实现对家居电器的远程控制。
首先,将蓝牙模块与单片机连接,并进行相应的配置。
基于51单片机及蓝牙模块通讯的动态密码锁设计
密码锁随着时代的发展,从机械密码锁过渡到了现阶段所使用的电子密码锁。
电子密码锁由于其简单的数字组合便可作为其密钥的优点受到了大家的青睐,然而,没有实体密钥的缺陷也成为了数字密码锁容易被破解的缺陷。
将动态密码自动变更的功能与数字密码锁相结合会是一个很好的解决方案。
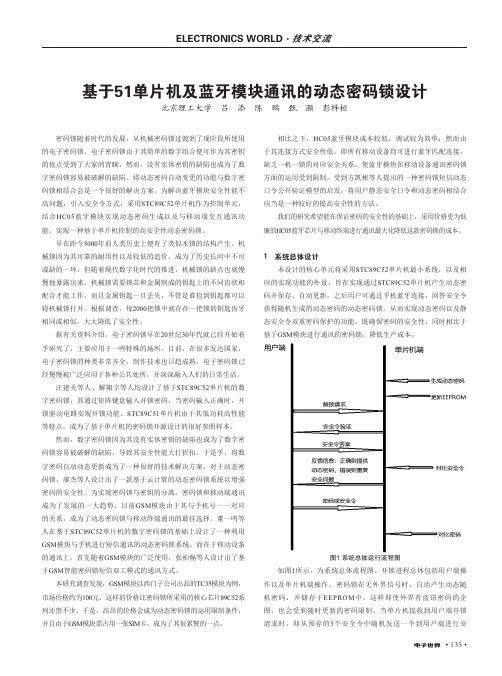
为解决蓝牙模块安全性能不高问题,引入安全令方式,采用STC89C52单片机作为控制单元,结合HC05蓝牙模块实现动态密码生成以及与移动端交互通讯功能,实现一种基于单片机控制的高安全性动态密码锁。
早在距今5000年前人类历史上便有了类似木锁的结构产生。
机械锁因为其可靠的耐用性以及较低的造价,成为了历史长河中不可或缺的一环。
但随着现代数字化时代的推进,机械锁的缺点也就慢慢地暴露出来。
机械锁需要锁芯和金属制成的钥匙上的不同齿状相配合才能工作,而且金属钥匙一旦丢失,不管是谁捡到钥匙都可以将机械锁打开。
根据调查,每2000把锁中就存在一把锁的钥匙齿牙相同或相似,大大降低了安全性。
据有关资料介绍,电子密码锁早在20世纪30年代就已经开始着手研究了,主要应用于一些特殊的场所。
目前,在很多发达国家,电子密码锁的种类非常齐全,制作技术也日趋成熟,电子密码锁已经慢慢被广泛应用于各种公共处所,并深深融入人们的日常生活。
汪建关等人、解翔宇等人均设计了基于STC89C52单片机的数字密码锁,其通过矩阵键盘输入开锁密码,当密码输入正确时,开锁驱动电路实现开锁功能。
STC89C51单片机由于其低功耗高性能等特点,成为了基于单片机的密码锁开源设计的很好参照样本。
然而,数字密码锁因为其没有实体密钥的缺陷也成为了数字密码锁容易被破解的缺陷,导致其安全性能大打折扣。
于是乎,将数字密码自动动态更新成为了一种很好的技术解决方案。
对于动态密码锁,廖杰等人设计出了一款基于云计算的动态密码锁系统以增强密码的安全性。
为实现密码锁与密钥的分离,密码锁和移动端通讯成为了发展的一大趋势,目前GSM模块由于其与手机号一一对应的关系,成为了动态密码锁与移动终端通讯的最佳选择。
《2024年基于单片机的蓝牙接口设计及数据传输的实现》范文

《基于单片机的蓝牙接口设计及数据传输的实现》篇一一、引言随着无线通信技术的快速发展,蓝牙技术因其低功耗、低成本和广泛兼容性,已成为各种设备间通信的常用手段。
本篇论文旨在探讨基于单片机的蓝牙接口设计及其数据传输的实现方法。
我们将通过设计合适的蓝牙接口电路,实现对单片机与蓝牙模块之间的有效数据传输。
二、系统概述本系统主要由单片机、蓝牙模块、电源模块以及相应的电路组成。
其中,单片机作为核心控制单元,负责数据的处理和传输;蓝牙模块则负责与外部设备进行无线通信;电源模块为整个系统提供稳定的电源。
三、蓝牙接口设计1. 硬件设计在硬件设计方面,我们选用了一款适用于单片机的蓝牙模块。
通过合适的接口电路连接单片机和蓝牙模块,包括电源电路、串口通信电路等。
在电路设计中,需要注意保证电路的稳定性和抗干扰性,以保障数据的正常传输。
2. 软件设计在软件设计方面,我们需要编写相应的程序代码,实现单片机与蓝牙模块之间的通信。
这包括初始化蓝牙模块、设置通信参数、数据传输等步骤。
同时,还需要考虑如何处理可能出现的通信错误和异常情况。
四、数据传输实现1. 数据发送在数据发送方面,我们可以通过单片机将需要传输的数据发送到蓝牙模块。
这可以通过串口通信实现,即单片机将数据通过串口发送到蓝牙模块的TX引脚,然后由蓝牙模块进行无线传输。
2. 数据接收在数据接收方面,当蓝牙模块接收到外部设备发送的数据时,会通过RX引脚将数据传输到单片机。
单片机通过相应的程序代码对接收到的数据进行处理和存储。
五、系统测试与优化1. 系统测试在系统测试阶段,我们需要对系统的各项功能进行测试,包括蓝牙模块的连接、数据的发送和接收等。
同时,还需要测试系统的稳定性和可靠性,以确保系统能够正常工作。
2. 系统优化在系统优化方面,我们可以通过调整硬件电路和软件程序来提高系统的性能。
例如,优化电路设计以降低功耗和噪声干扰,优化软件程序以提高数据处理速度和通信效率等。
六、结论本篇论文详细介绍了基于单片机的蓝牙接口设计及数据传输的实现方法。
基于51单片机的智能手环蓝牙模块设计
基于51单片机的智能手环蓝牙模块设计王烈进王游司陈洪燕孙超卢宇摘要:随着通信技术的发展,无线通信也日趋成熟,蓝牙就是其中之一。
现在的蓝牙通信技术都已经应用在手机、耳机、便携电脑等各种设备中。
本文主要介绍智能手环的蓝牙系统,本文采用蓝牙模块HC-06,HC-06模块是专为智能无线数据传输而打造的,采用英国CSR公司BlueCore4-Ext芯片,遵循V2.0+EDR蓝牙协议。
蓝牙模块HC-06是一款支持多种接口,支持SPP蓝牙串口协议,具有体积小、成本低、灵敏度高等优点。
本文主要简介蓝牙技术、蓝牙通信模块的硬件电路设计、蓝牙通信模块的软件设计以及系统测试。
关键词:单片机;智能手环;蓝牙;模块设计TP393 :A :1009-3044(2018)23-0260-021蓝牙技术简介直至蓝牙4.0版本推出后低功耗蓝牙技术才于智能穿戴设备联系在一起,这些都是从最初蓝牙耳机时代逐渐演变过来的,现在蓝牙技术应用的智能穿戴设备几乎成为现在年轻一代的标志。
其实在我们的生活中蓝牙技术已然在悄无声息地改变着我们的学习与生活。
我们已经习惯于将智能手机通过蓝牙与车载语音系统进行连接,从而可以安全地通过汽车音响完成拨打或接听电话等操作;在家里时,智能手机或者PDA同样也可以通过蓝牙与智能机顶盒连接,从而将智能设备中的图片,影像资料同步到超清电视机屏幕上。
蓝牙(bluetooth)就是一种工作在2.4GHZ(即ISM)频段的一种无线短波通信技术,是一种大容量近距离无线数字通信技术标准。
蓝牙是一种异步全双工的通信方式,其核心技术就是跳频技术。
蓝牙的通信必须要按照蓝牙通信协议进行,蓝牙协议规范允许开发人员开发基于可互操作的无线模块和数据通信协议的交互式服务和应用,目的是使符合该规范的各种应用之间能够实现互操作。
2蓝牙模块硬件电路设计2.1 HC-06模块介绍HC-06模块是专为智能无线数据传输而打造的,采用英国CSR公司BlueCore4-Ext芯片,遵循V2.0+EDR蓝牙协议。
51单片机与手机蓝牙通讯1602液晶显示

程序内容
void init() { en=0; rs=0; rw=0; write_com(0x38); write_com(0x0c); write_com(0x06); write_com(0x01); TMOD=0X20; TH1=0XFD; TL1=0XFD; TR1=1; SCON=0X50; } //初始化函数
@WPS官容
void delay(uchar z) //延时函数 { uchar x; while(z--) { for(x=110;x>0;x--); } } //*************************************************************************** void write_com(uchar com) //写指令函数 { rs=0; rw=0; P2=com; delay(5); en=1; delay(5); en=0; }
程序设计
void main() { init(); while(1) { } } //--主函数!
while(RI==0); a=SBUF; write_data(a); RI=0;
谢谢观赏
WPS Office
Make Presentation much more fun
单片机与手机蓝牙通讯
袁亮
1602液晶显示蓝发送的字符
一:设计要求
二:元件选取
三:了解元件信息 四: 系统框图
五:程序内容
设计要求
利用STC89C52R单片机和1602液晶显示蓝牙模块 接收到的字符
元件选取
基于51单片机的蓝牙小车设计
内容仅为学习使用,多处摘录源于网络,请勿用于毕业论文基于蓝牙遥控的智能小车设计与制作摘要:关键词:单片机;蓝牙遥控;PWM调速目录第一章前言----------------------------------------------------------------------4 第二章方案比较与论证 ------------------------------------------------------5 2.1总体方案设计---------------------------------------------------------------------5 2.2蓝牙模块选择---------------------------------------------------------------------6 2.3 电机驱动模块选择--------------------------------------------------------------6 第三章智能小车底盘结构分析 --------------------------------------------7 3.1底板设计----------------------------------------------------------------------------7 3.2 电机与底板的连接支架设计--------------------------------------------------8 3.3整体装配图-------------------------------------------------------------------------9第四章控制系统电路设计 -------------------------------------------------10 4.1 单片机最小系统设计----------------------------------------------------------10 4.2 电机驱动电路设计-------------------------------------------------------------11 4.3 蓝牙模块设计-------------------------------------------------------------------13 4.4 电源电路设计--------------------------------------------------------------------15 4.5 电路板设计----------------------------------------------------------------------16 第五章设计的元器件清单--------------------------------------------------16 第六章调试结果分析 --------------------------------------------------------17 6.1 各模块功能调试----------------------------------------------------------------17 6.2设计的总结----------------------------------------------------------------------18 参考文献-------------------------------------------------------------------------19附录A----------------------------------------------------------------------------20 附录B----------------------------------------------------------------------------21 附录C----------------------------------------------------------------------------22第一章前言NC第二章方案比较与论证本次毕业设计主要是针对蓝牙智能小车进行分析、设计和制作。
基于单片机的蓝牙传输(终审稿)

基于单片机的蓝牙传输文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-简易无线数据收发设计赛项报告小组成员:指导老师:日期:二〇一五年五月三十一日摘要本设计以STC89C52单片机为控制核心。
经蓝牙模块实现无线连接,发送数据和接收数据,通过LCD1602显示接收的数据和编辑发送的数据,两个单片机通过内部程序实现实时接收、发送和显示,从而完成相关要求。
关键字:控制;无线连接;接收;发送;显示目录1方案设定1-1电路设计框图1-2功能叙述本作品通过HC-05主从机一体蓝牙模块实现与带蓝牙的设备先通过OPP 蓝牙协议来实现配对连接,实现连接配对可通过电路板上的数字按键来实现输入,经STC89C52单片机处理后通过HC-05蓝牙无线传送到另一方单片机上,通过STC89C52单片机处理后可在LCD1602液晶显示所接受到的数据!1-3使用说明在接通电源前,先把蓝牙模块插到单片机上,紧接着启动电源。
观察蓝牙模块的指示灯,等待两个单片机之间的连接匹配,待指示灯出现双闪后就匹配连接成功。
接下来可根据自己想要发送数据在单片机的按键区域(0~9)按下,按下后显示屏便出现你所要发送的数据,确认无误之后就按下单片机上的发送按钮即马上发送到另一方单片机上(两个单片机可以互相发送)!使用前:使用时:2系统硬件设计2-1主控制模块图6-1STC89C52资料:STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有 8K 在系统可编程Flash存储器。
STC89C52使用经典的MCS-51内核,但做了很多的改进使得芯片具有传统51单片机不具备的功能。
在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
具有以下标准功能: 8k字节Flash,512字节RAM, 32 位I/O 口线,看门狗定时器,内置4KB EEPROM,MAX810复位电路,3个16 位定时器/计数器,4个外部中断,一个7向量4级中断结构(兼容传统51的5向量2级中断结构),全双工串行口。
基于51单片机的蓝牙小车
《专业综合设计与实验》课程设计报告书2019年11月课程设计报告书1.硬件电路设计1.1总体设计智能车主要现实远程来控制智能车的运动。
其主要模块为:单片机模块、无线通讯模块、电机驱动模块。
其主要结构框图如下图1所示。
图1主要结构框图总体仿真电路图:图2 总体仿真电路图单片机最小系统原理图:图3 复位电路与晶振电路图4 单片机最小系统原理图1.2 L298N驱动模块及原理介绍蓝牙小车采用直流电机的驱动采用L298N驱动模块,其原理图如图4所示:图5 L298N驱动模块原理图L298N驱动模块采用ST公司原装全新的L298N芯片,采用SMT工艺稳定性高,采用高质量铝点解电容,使电路温度工作。
可以直接驱动两路3-16V直流电机,并提供了5V输出接口(输入最低只要6V),可以给5V单片机电路供电(低纹波系数),支持3.3V MCUARM控制,可以方便的控制电流电机速度和方向,是智能小车必备利器。
表1 驱动状态编码表1.3蓝牙模块蓝牙模块支持短距离无线传输,可以通过手机与蓝牙模块的配对实现对小车的无线控制。
本小车采用的是HC-05蓝牙芯片,在HC-05芯片里已经将蓝牙协议封装好,只需要通过串口通信实现上位机(手机)与下位机(51单片机)的无线通信。
蓝牙模块中蓝牙芯片的TXD与RXD分别于单片机的RXD与TXD相接,VCC与单片机电源,GND与单片机GND相连。
HC-05使用R1114作为稳压芯片,将单片机提供的5V电压转换为3.3V的低电压,为蓝牙芯片供电。
图6 蓝牙连接原理图2.软件设计在本次设计中,主程序主要是在单片机的控制下,对蓝牙模块输入的信息进行存储分析,来控制电机驱动,以达到控制小车的前进、后退、左转、右转。
在这个过程中,单片机首先进行初始化,包括设置单片机各个端口的方向,各个变量的初始化,以及单片机振荡频率的校准等。
单片机定时对蓝牙模块串口读数据,如果串口的数据读出,则对读出的数据进行分析,读出的数据如果为g、b、l、r、s则分别对应小车的前进、后退、左转、右转、图8 实物连接图图9 APP遥控界面截图以上是蓝牙小车静止时的图片,当手机客户端按下前进按钮后,小车两个轮子都前进;当手机客户端按下后退按钮时,小车两个轮子都后退;当手机客户端按下左转按钮后,小车做轮后退右轮前进;当手机客户端按下右转按钮时,小车左轮前进右轮后退。
基于51单片机的手机蓝牙遥控小车设计(程序元件清单实物图)

基于51单片机的手机蓝牙遥控小车设计(程序元件清单实物图)本人一直想做一个遥控车,终于今天实现了,跟大家分享一下。
一、元件清单1、某宝购买一个智能小车底盘(本人车是四驱的,因此有四个电机,两块亚克力板和一些配件螺丝)2、L298n模块两个(一个298控制两个电机)3、HC-06蓝牙模块4、电池盒跟18650电池3个5、单片机最小系统6、杜邦线至少12根,当然越多越好7、若干根导线(连接电机用的,以及电池盒连到L298N跟单片机)二、制作过程首先,先去了解一下L298N的接线,我当时也是懵逼了好久,反正摸索着也会了,一般店家都有资料。
然后是蓝牙模块的使用,拿到蓝牙模块后,有开发板的话(没有就用单片机的烧录器),先按照TXD接TXD,RXD接RXD,打开电脑的串口助手与蓝牙构建通信,打开AT,发送AT指令集,比如设设波特率,改个名字,改个配对的密码。
但通过蓝牙与单片机连接通信的时候,就是TXD接RXD了。
最后一个就是,本人在接线的时候经常碰壁。
比如,你以为接好的线他其实没接好,根本没通,还是拿万用表B了才知道。
因为本人忘了买电池盒,所以我是用12V的直流电接着的,导致遥控车拖着跟电线。
三、实物图(拖着跟电线以及充电宝供电的车不过我没通电)资料内包括L298N的部分资料,以及蓝牙的说明书(看AT指令集就好)和源程序。
app:单片机源程序如下:1./*手机蓝牙遥控小车 APP可以在应用市场搜蓝牙串口助手2.左转右转大概是90度我的是四驱的,如果是只有一个l298N 的话就把带2的删了3.pwm有十级变速*/4.5.6.#include <reg52.h>7.8.#define Left_moto2_pwm P0_4 //接驱动模块ENA 使能端,输入PWM信号调节速度左后轮9.#define Right_moto2_pwm P0_5 //接驱动模块ENB 右后轮10.#define Left_moto_pwm P1_4 //接驱动模块ENA 使能端,输入PWM信号调节速度左前轮11.#define Right_moto_pwm P1_5 //接驱动模块ENB 右前轮12.#define uchar unsigned char13.#define uint unsigned int14.15.sbit P0_4=P0^4; //定义P0_416.sbit P0_5=P0^5; //定义P0_517.sbit P1_4=P1^4; //定义P1_418.sbit P1_5=P1^5; //定义P1_519.20./*电机驱动IO定义*/21.sbit IN1 = P1^2; //为1 左电机反转前轮22.sbit IN2 = P1^3; //为1 左电机正转前轮23.sbit IN3 = P1^6; //为1 右电机正转前轮24.sbit IN4 = P1^7; //为1 右电机反转前轮25./*sbit EN1 = P1^4; //为1 左电机使能26.sbit EN2 = P1^5; //为1 右电机使能 */27.28.sbit IN5 = P0^2; //为1 左电机反转后轮29.sbit IN6 = P0^3; //为1 左电机正转后轮30.sbit IN7 = P0^6; //为1 右电机正转后轮31.sbit IN8 = P0^7; //为1 右电机反转后轮32./*sbit EN3 = P0^4; //为1 左电机使能后轮33.sbit EN4 = P0^5; //为1 右电机使能后轮 */34.35.bit Right_moto_stop=1;36.bit Left_moto_stop =1;37.unsigned int time=0;38.int pwm=1;39.40.#define left_motor_en EN1 = 1 //左电机使能41.#define left_motor_stops EN1 = 0 //左电机停止42.#define right_motor_en EN2 = 1 //右电机使能43.#define right_motor_stops EN2 = 0 //右电机停止44.45.#define left_motor2_en EN3 = 1 //左电机使能后46.#define left_motor2_stops EN3 = 0 //左电机停止后47.#define right_motor2_en EN4 = 1 //右电机使能后48.#define right_motor2_stops EN4 = 0 //右电机停止后49.50.51.#define left_motor_go IN1 = 0, IN2 = 1//左电机正传52.#define left_motor_back IN1 = 1, IN2 = 0//左电机反转53.#define right_motor_go IN3 = 1, IN4 = 0//右电机正传54.#define right_motor_back IN3 = 0, IN4 = 1//右电机反转55.56.#define left_motor2_go IN5 = 0, IN6 = 1//左电机正传57.#define left_motor2_back IN5 = 1, IN6 = 0//左电机反转58.#define right_motor2_go IN7 = 1, IN8 = 0//右电机正传59.#define right_motor2_back IN7 = 0, IN8 = 1//右电机反转60.61.unsigned char pwm_val_left =0;//变量定义62.unsigned char push_val_left =0;// 左电机占空比N/1063.unsigned char pwm_val_right =0;64.unsigned char push_val_right=0;// 右电机占空比N/1065.66.67.void delay(uint z)68.{69.uint x,y;70.for(x = z; x > 0; x--)71.for(y = 114; y > 0 ; y--);72.}73.74.75.76.//蓝牙初始化77.void UART_INIT()78.{79.SM0 = 0;80.SM1 = 1;//串口工作方式181.REN = 1;//允许串口接收82.EA = 1;//开总中断83.ES = 1;//开串口中断84.TMOD = 0x20;//8位自动重装模式85.TH1 = 0xfd;86.TL1 = 0xfd;//9600波特率87.TR1 = 1;//启动定时器188.}89.90./************************************************************************/91.void run(void) //pwm调速函数92.{93.push_val_left =pwm; //PWM 调节参数1-10 1为最慢,10是最快改这个值可以改变其速度94.push_val_right =pwm; //PWM 调节参数1-10 1为最慢,10是最快改这个值可以改变其速度95.if(pwm==10) pwm=0;96.if(pwm==0&&pwm<0) pwm=0;97.98.}99.100.101./******************************************************** ****************/102./* PWM调制电机转速 */ 103./******************************************************** ****************/104.105.106./* 左侧电机调速 */107./*调节push_val_left的值改变电机转速,占空比 */108.void pwm_out_left_moto(void)109.{110.if(Left_moto_stop)111.{112.if(pwm_val_left<=push_val_left)113.{ Left_moto_pwm=1;114.Left_moto2_pwm=1; }115.else116.{ Left_moto_pwm=0;Left_moto2_pwm=0; }117.118.if(pwm_val_left>=10)119.pwm_val_left=0;120.}121.else { Left_moto_pwm=0;Left_moto2_pwm=0; }122.}123./******************************************************** **********/124./* 右侧电机调速 */125.void pwm_out_right_moto(void)126.{127.if(Right_moto_stop)128.{129.if(pwm_val_right<=push_val_right)130.{ Right_moto_pwm=1;131.Right_moto2_pwm=1; }132.else133.{Right_moto_pwm=0;134.Right_moto2_pwm=0;}135.if(pwm_val_right>=10)136.pwm_val_right=0;137.}138.else {Right_moto_pwm=0;Right_moto2_pwm=0; } 139.}140./***************************************************/141.///*TIMER0中断服务子函数产生PWM信号*/142.void timer0()interrupt 1 using 2143.{144.TH0=0XF8; //1Ms定时145.TL0=0X30;146.time++;147.pwm_val_left++;148.pwm_val_right++;149.pwm_out_left_moto();150.pwm_out_right_moto();151.}152.153.//小车前进154.void forward()155.{156.ET0 = 1;157.run(); //pwm 程序158.left_motor_go; //左电机前进159.right_motor_go; //右电机前进160.left_motor2_go; //左电机前进后轮161.right_motor2_go; //右电机前进后轮162.}163.164.void left_go() //左转165.{166.ET0 = 1;167.run();168.left_motor_back;169.right_motor_go;170.left_motor2_back;171.right_motor2_go;172.delay(700);173.forward();174.}175.//右转176.void right_go()177.{178.ET0 = 1;179.run();180.delay(50);181.right_motor_back;182.left_motor_go;183.right_motor2_back;184.left_motor2_go;185.delay(700);186.forward();187.}188.//小车左转圈189.void left()190.{191.ET0 = 1;192.run();193.delay(50);194.right_motor_go; // 右电机前进195.left_motor_back; // 左电机后退196.right_motor2_go; // 右电机前进197.left_motor2_back; // 左电机后退198.}199.200.//小车右转圈201.void right()202.{203.ET0 = 1;204.run();205.left_motor_go;206.right_motor_back;207.left_motor2_go;208.right_motor2_back; 209.}210.211.//小车后退212.void back()213.{214.ET0 = 1;215.run();216.left_motor_back;217.right_motor_back; 218.left_motor2_back;219.right_motor2_back; 220.}221.222.//小车停止223.void stop()224.{225.ET0 = 0;226.P1=0;227.P0=0;228.}229.230.231.//串口中断232.void UART_SER() interrupt 4 233.{234.if(RI)236.RI = 0;//清除接收标志237.switch(SBUF)238.{239.case 'g': forward(); break;//前进240.case 'b': back(); break;//后退241.case 'l': left(); break;//左转圈242.case 'r': right(); break;//右转圈243.case 's': stop(); break;//停止244.case 'z': left_go(); break;//左转行驶245.case 'y': right_go(); break;//右转行驶246.case 'p': pwm++;break; //加速247.case 'c': pwm--;break; //减速248.}249.250.}251.}252.253.void main()254.{255.TMOD=0X01;256.TH0= 0XF8; //1ms定时257.TL0= 0X30;258.TR0= 1;259.ET0= 1;260.EA = 1;261.UART_INIT();//串口初始化262.while(1);263.}264.。
毕业设计(论文)--基于51单片机的蓝牙防丢器系统

届.别.学号毕业设计基于单片机蓝牙防丢器系统姓名系别、专业导师姓名、职称完成时间摘要在现实生活中,大多数人都曾有过丢失贵重物品的痛苦经历,那懊恼甚至惊恐的情绪实在让人煎熬!现在生活节奏变得越来越快,周遍的环境却日益恶化,健忘、疏忽、被窃等原因造成的贵重物品的丢失几乎每天都在上演。
因此,为了防范这些意外的发生,你身边需要有一个忠实的保护神,那就是随身佩带一套防丢器,她可以有效保护你的贵重物品免于丢失!本设计蓝牙防丢器采用由STC89C52单片机、复位电路、晶振电路、蓝牙模块电路、手机接收报警和电源模块组成。
首先打开手机蓝牙和主板蓝牙进行配对,配对成功后,单片机通过串口和蓝牙模块HM-05发送数据,手机蓝牙实时接收数据。
当手机和蓝牙主板的距离超过一定距离时,手机发出报警声,提示有小偷,马上回去查看寻找。
蓝牙防丢器具有可靠性高,稳定性好,抗干扰能力强,使用方便。
性价比高等特定。
关键字:STC89C52单片机,蓝牙防丢器,蓝牙通信ABSTRACTIn real life, most of us have had the pain of the loss of valuables, that upset even panic mood is really let a person suffering!Now life rhythm becomes faster and faster, the neighboring environment is deteriorating, forgetfulness, negligence, theft and other reasons caused by the loss of valuables on almost every day.Therefore, in order to prevent the occurrence of the accident, you need to have a faithful patron saint, wear a lost; preventer, she can effectively protect your valuables from lost!Is used by the design of bluetooth lost; preventer STC89C52 single-chip computer and reset circuit, crystals circuit, bluetooth module circuit, receiving alarm and power module.First open the mobile phone bluetooth bluetooth matching and motherboard, after the success of the match, microcontroller through the serial port and bluetooth module HM - 05 to send data, cell phone bluetooth receiving data in real time.When cell phones and bluetooth motherboard is more than a certain distance, phone alarm, suggesting the thief, go back to see at once in search.Bluetooth control apparatus has high reliability, good stability and anti-interference ability is strong, easy to use.The specific price higher.Key words: STC89C52 single-chip computer, bluetooth device, bluetooth communication摘要.................................................................. I I ABSTRACT ............................................................. I II 1、绪论. (2)1.1课题的背景 (2)1.2 蓝牙设计的意义 (2)2、总体方案设计 (2)3、系统方案比较、设计与论证 (3)3.1主控制器模块选择 (3)3.2电源选取 (3)4、芯片资料简介 (4)4.1 STC89C52单片机的简介 (4)4.1.1 STC89C52单片机主要特性 (5)5、硬件实现及单元电路设计 (8)5.1主控制模块 (8)5.2报警模块的设计 (9)5.3电源部分的设计 (9)6、系统软件设计 (10)6.1程序结构分析 (10)6.2系统程序流图 (10)7、系统的安装与调试 (11)7.1安装步骤 (11)结论 (11)致谢 (12)参考文献 (12)附录1整体电路原理图 (13)附录2元器件清单 (13)附录3部分源程序 (14)1、绪论1.1课题的背景随着社会的进步,现代生活节奏的加快,在快节奏的都市生活中,人们外出的机会也越来越多,很多人常常会丢三落四,常常会记不清楚把手提包放在那里,或者把电话弄丢,更要命的是有时候带孩子上街,稍不留意孩子就跑丢了,随身带的提包有时候也不免被小偷盯上,在等车等船时,稍不留意,小偷就会拎走你的包,如果小孩走丢,那就更焦急,所以为了防止这类事情的发生,电子防丢失报警器就应运而生。
《2024年基于单片机的蓝牙接口设计及数据传输的实现》范文

《基于单片机的蓝牙接口设计及数据传输的实现》篇一一、引言随着科技的发展,无线通信技术已广泛应用于各种设备中。
蓝牙技术作为一种广泛使用的无线通信协议,在实现设备间低功耗、低成本的数据传输中发挥着重要作用。
本文将详细介绍基于单片机的蓝牙接口设计及数据传输的实现过程。
二、设计背景与目标本设计旨在实现单片机与蓝牙模块的连接,以实现设备间的无线数据传输。
设计背景是基于物联网、智能家居等领域的快速发展,需要实现设备间的无线通信。
设计目标包括:实现单片机与蓝牙模块的稳定连接;实现高效、可靠的数据传输;降低系统功耗,提高系统稳定性。
三、硬件设计1. 单片机选择:选用具有蓝牙通信功能的单片机,如STM32系列。
该类单片机具有丰富的资源,可满足蓝牙通信的需求。
2. 蓝牙模块选择:选用与单片机兼容的蓝牙模块,如HC-06、HC-08等。
这些模块具有体积小、功耗低、传输速度快等优点。
3. 接口电路设计:将单片机与蓝牙模块进行连接,包括电源电路、时钟电路等。
为保证稳定性,应采用适当的滤波电路和抗干扰措施。
四、软件设计1. 蓝牙模块初始化:对蓝牙模块进行初始化设置,包括波特率、通信模式等。
2. 数据传输协议设计:制定数据传输协议,包括数据包格式、发送和接收方式等。
协议应具有较高的可靠性和抗干扰性。
3. 单片机程序设计:编写单片机程序,实现与蓝牙模块的通信。
程序应包括数据发送、接收、处理等功能。
4. 数据加密与安全:为保证数据传输的安全性,可对数据进行加密处理。
加密算法可采用常见的对称加密或非对称加密算法。
五、数据传输实现1. 数据发送:单片机将待发送的数据按照协议格式进行封装,通过蓝牙模块发送出去。
2. 数据接收与处理:蓝牙模块接收到数据后,将数据传输给单片机。
单片机对接收到的数据进行解析和处理,根据需要进行相应的操作。
3. 数据传输测试:对数据传输进行测试,包括传输速度、传输距离、误码率等方面。
测试结果应满足设计要求。
六、系统调试与优化1. 系统调试:对系统进行整体调试,检查各部分功能是否正常。
基于51单片机的蓝牙循迹小车

基于51单⽚机的蓝⽛循迹⼩车51单⽚机课程设计做了辆蓝⽛⼩车,下⾯是对课程设计内容的⼀些总结基于51单⽚机的蓝⽛循迹⼩车硬件模块L298N具体如图所⽰:⼯作原理简介:可以直接驱动两路 3-16V 直流电机,并提供了 5V 输出接⼝(输⼊最低只要 6V),可以给 5V 单⽚机电路系统供电。
输⼊电压最好是7v以上,输⼊电压低了会导致⼀系列问题,在后⾯有具体实践总结具体应⽤:可以⽅便的控制直流电机速度和⽅向,也可以控制 2 相步进电机,5 线 4 相步进电机。
管脚应⽤可以参考如图所⽰:①板载5V输出使能:如果跳线帽接上,则5v端⼦可以输出电压,若跳线帽没有街上,则12v输⼊端⼦没有作⽤,只能5v输⼊⼝输⼊(如果不接上直接废了,5v 输⼊基本不能使电机模块正常⼯作)②AB通道使能:端⼦接在上⾯表⽰AB通道⼀直保持⾼电平,处于使能状态,并且电压和5v输⼊端⼝电压相同;若处于没有使能状态,直接影响到输⼊端,让其⽆法⼯作!③单⽚机IO控制输⼊ + 马达AB输出 :顾名思义,四个IO输⼊端⼝和单⽚机四个IO⼝相连,然后通过电机驱动模块(双H桥电路)马达AB输出,以获得更⼤的驱动直流减速电机的能⼒,带动电机转动!B站直接搜L298N电机驱动模块,有视频详情介绍问题以及解决⽅案下⾯是⼀些使⽤L298N驱动电机的⼀些问题以及解决⽅法总结问题:1.直流减速电机不能正常转动,⼀个轮⼦只能单⽅向转动2.使能端⼝帽摘下来后,pwm信号输⼊问题3.供电问题解决:1.起初⽤4节南孚电池供电,⽤万⽤表测电压⼩于4.8v(电池快没啥电了),更换四节电池后⽤万⽤表测得4.9v+,上⾯出现的问题解决了2.输⼊端电压⼩于7v(⽤得四节南孚电池6v不到供电),使能电压和5v输⼊端⼦的电压相同,经测量5v端⼝电压只有3.8v左右,故使能电压就只有3.8v左右了,对PWM输出使能有⼀定影响3.L298N电机驱动中有稳压降压模块,如果供电⾜够⼤(⼤于7v),那么稳压降压模块会发挥作⽤,使得5v输⼊端⼦、使能端⼦、马达电机都能有稳定的5v⾼电平输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
}
void keyscan()
{
P1=0xfe;
temp=P1;
temp=temp&0xf0;
while(temp!=0xf0)
{
delay(2);
temp=P1;
temp=temp&0xf0;
while(temp!=0xf0)
{
temp=P1;
switch(temp)
{
case 0xee:num=1;break;
sbit rw=P2^5;
sbit Key=P2^4;
uchar code table_Receive[]={"Receive:"};
uchar code table_Send[]={" Send:"};
uchar code table[]={'0','1','2','3','4','5','6','7','8','9'};
case 0x7d:num=8;break;
}
while(temp!=0xf0)
{
temp=P1;
temp=temp&0xf0;
}
num=num-1;
}
}
P1=0xfb;
temp=P1;
temp=temp&0xf0;
while(temp!=0xf0)
{
delay(2);
temp=P1;
temp=temp&0xf0;
第4脚:RS为寄存器选择,高电平1时选择数据寄存器、低电平0时选择指令寄存器。
第5脚:RW为读写信号线,高电平(1)时进行读操作,低电平(0)时进行写操作。
第6脚:E(或EN)端为使能(enable)端,高电平(1)时读取信息,负跳
变时执行指令。
第7~14脚:D0~D7为8位双向数据端。第15~16脚:空脚或背灯电
case 0xde:num=2;break;
case 0xbe:num=3;break;
case 0x7e:num=4;br)
{
temp=P1;
temp=temp&0xf0;
}
num=num-1;
}
}
P1=0xfd;
temp=P1;
temp=temp&0xf0;
基于
摘要
本设计以STC89C52单片机为控制核心。经蓝牙模块实现无线连接,发送数据和接收数据,通过LCD1602显示接收的数据和编辑发送的数据,两个单片机通过内部程序实现实时接收、发送和显示,从而完成相关要求。
1
1-1
无线信号
串口串口
图4-1
注:由于STC89C52芯片串口寄存器的容量限制,每次收发只能一个字节。
write_lcd_com(0x06);
write_lcd_com(0x01);
for(m=0;m<8;m++)
{
write_data(table_Receive[m]);
delay(1);
}
write_lcd_com(0x80+0x40);
for(n=0;n<8;n++)
{
write_data(table_Send[n]);
en=1;
delay(5);
en=0;
}
void write_data(uchar date){
rs=1;
P0=date;
delay(5);
en=(1);
delay(5);
en=0;
}
void lcdinit(){
en=0;
write_lcd_com(0x38);
write_lcd_com(0x0c);
2
2-1
图6-1
2-2
图8-1
2-3
图9-1
LCD1602资料:
1602采用标准的16脚接口,其中:
第1脚:GND为电源地
第2脚:VCC接5V电源正极
第3脚:V0为液晶显示器对比度调整端,接正电源时对比度最弱,接地电源时对比度最高(对比度过高时会 产生“鬼影”,使用时可以通过一个10K的电位器调整对比度)。
while(temp!=0xf0)
{
delay(2);
temp=P1;
temp=temp&0xf0;
while(temp!=0xf0)
{
temp=P1;
switch(temp)
{
case 0xed:num=5;break;
case 0xdd:num=6;break;
case 0xbd:num=7;break;
注:关于E=H脉冲——开始时初始化E为0,然后置E为1。
2-4
图10-1
注:键盘输入部分使用矩阵键盘的设计原理。
3
3-1
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit rs=P2^6;
sbit en=P2^7;
1-2
本作品通过HC-05主从机一体蓝牙模块实现与带蓝牙的设备先通过OPP蓝牙协议来实现配对连接,实现连接配对可通过电路板上的数字按键来实现输入,经STC89C52单片机处理后通过HC-05蓝牙无线传送到另一方单片机上,通过STC89C52单片机处理后可在LCD1602液晶显示所接受到的数据!
1-3
在接通电源前,先把蓝牙模块插到单片机上,紧接着启动电源。观察蓝牙模块的指示灯,等待两个单片机之间的连接匹配,待指示灯出现双闪后就匹配连接成功。接下来可根据自己想要发送数据在单片机的按键区域(0~9)按下,按下后显示屏便出现你所要发送的数据,确认无误之后就按下单片机上的发送按钮即马上发送到另一方单片机上(两个单片机可以互相发送)!
源。
15脚背光正极。
16脚背光负极。
特性:
3.3V或5V工作电压,对比度可调内含复位电路提供各种控制命令,如:清屏、字符闪烁、光标闪烁、显示移位等多种功能有80字节显示数据存储器DDRAM
内建有192个5X7点阵的字型的字符发生器CGROM8个可由用户自定义的5X7的字符发生器CGRAM特征应用微功耗、体积小、显示内容丰富、超薄轻巧,常用在袖珍式仪表和低功耗应用系统中。操作控制
while(temp!=0xf0)
{
temp=P1;
switch(temp)
{
case 0xeb:num=9;break;
case 0xdb:num=10;break;
}
while(temp!=0xf0)
uchar num,temp,temp2,a,flag,add;
uchar n,m;
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void write_lcd_com(uchar com){
rs=0;
P0=com;
delay(5);