MATLAB解决一维搜索
第三章 一维搜索法

0
x1 x2
x3
3-1 确定初始区间的进退法
探测初始空间的进退法步骤: 探测初始空间的进退法步骤 (1)给定初始点 x0 ,初始步长 h ,令 x1 = x0 ,记: f1 = f ( x1 ) 给定初始点 初始步长 令 记 (2)产生新的探测点 x2 = x1 + h ,记 f 2 = f ( x2 ) 产生新的探测点 (3)比较函数值 f1 和 f 2 的大小 确定向前或向后探测的策略 比较函数值 的大小,确定向前或向后探测的策略 则加大步长,令 若: f1 > f 2 则加大步长 令 h = 2h ,转(4)向前探测 转 向前探测 (4)产生新的探测点 x3 = x0 + h ,令 f 3 = f ( x3 ) 产生新的探测点 令 (5)比较函数值 f 2 和 f 3 的大小 比较函数值 则调转方向,令 若: f1 < f 2 则调转方向 令 h = − h ,转(4)向后探测 转 向后探测
3-1 确定初始区间的进退法
f (x ) f ( x1 )
f ( x2 )
f ( x1 ) > f ( x2 ) > f ( x3 )
极小点在右端点的
f (x3 ) (x
x
x3 右侧
0
x1
x2 x3
3-1 确定初始区间的进退法
f (x ) f ( x1 ) f ( x2 )
f ( x3 )
f ( x1 ) < f ( x2 ) < f ( x3 )
h=-h;x2=x0+h;f2=f(x2); ; ; ; End
3-2 黄金分割法
一维搜索试探方法的基本思想: 一维搜索试探方法的基本思想:在确定了搜索区间的 前提下,不断缩小搜索区间, 前提下,不断缩小搜索区间,同时保持搜索区间内函数值 “大-小-大”的走势,直到区间的宽度小于预定的精度。 小 大 的走势,直到区间的宽度小于预定的精度。 黄金分割法基本思想: 黄金分割法基本思想 : 在搜索区间内插入两个黄金分 割点,将区间分成三段。利用函数的单谷性质,通过函数值 割点,将区间分成三段。利用函数的单谷性质, 大小的比较,删去其中一段。 大小的比较,删去其中一段。在保留下来的区间上作同样的 处置,如此往复送代,使搜索区间缩小到精度范围内, 处置,如此往复送代,使搜索区间缩小到精度范围内,得到 极小点的近似解。 极小点的近似解。
一维搜索方法
否
y3 y2 ?
是
是
否
h 0?
a 1
a 3
b 3
b 1
确定搜索《区车间辆优的化外设计推理法论与的实程践》序教框学课图件如图
2.算法的MATLAB实现 在MATLAB中编程实现的进退法函数为:minJT。 功用:用进退法求解一维函数的极值区间。 调用格式:
[minx,maxx]=minJT(f,x0,f0,eps0) 其中,f: 目标函数; x0: 初始点; h0: 初始步长; eps0: 精度; minx: 目标函数包含极值的区间左端点; maxx: 目标函数包含极值的区间右端点。
《车辆优化设计理论与实践》教学课件
2.4 一维搜索的插值方法
假定我们的问题是在某一确定区间内寻求函 数的极小点位置,虽然没有函数表达式,但 能够给出若干试验点处的函数值。我们可以 根据这些点处的函数值,利用插值方法建立 函数的某种近似表达式,进而求出函数的极 小点,并用它作为原来函数极小点的近似值。 这种方法称作插值方法,又称作函数逼近法。
《车辆优化设计理论与实践》教学课件
2.3 黄金分割法
黄金分割法适用于[a,b] 区间上的任何单峰函数求 极小值问题。对函数除要求“单峰”外不作其他要 求,甚至可以不连续。因此,这种方法的适应面相 当广。
黄金分割法也是建立在区间消去法原理基础上的试 探方法,即在搜索区间[a,b]内适当插入两点,并 计算其函数值,将区间分成三段。应用函数的单谷 性质,通过函数值大小的比较,删去其中一段,是 搜索区间得以缩短。然后再在保留下来的区间上作 同样的处置,如此迭代下去,是搜索区间无限缩小, 从而得到极小点的数值近似解。
f
( )
( )
f
(0 )
matlab实验鲍威尔法
实验报告实验名称:鲍威尔法院(系):机电学院专业班级:机械制造及其自动化姓名:学号:2013年5 月13 日实验一:鲍威尔法实验日期:2013年5 月13 日一、实验目的了解MATLAB的基本运用了解MATLB在优化中的使用二、实验原理鲍威尔法也是一种共轭法,利用函数值来构造共轭方向,同时引入坐标轮换的概念,利用搜索前后两个点之间的连线形成新的共轭方向,替换旧的共轭方向。
三、实验内容鲍威尔法程序:x0=[12;10];xk=x0;ie=10^(-7);ae=1;%初始化搜索方向d=zeros(2,2);d(:,1)=[1;0];d(:,2)=[0;1];Inc=zeros(2,1);k=0;MLN=100;%迭代求解while (ae>ie&&k<MLN)syms x1syms x2xktemp=xk;fun1=fun(x1,x2);fun1=inline(fun1);f0=feval(fun1,xk(1),xk(2));F0=f0;if k>0F0=eval(F0);end%沿d1方向进行一维搜索syms asyms x1;syms x2;xk1=xk+a*d(:,1);x1=xk1(1);x2=xk1(2);fun1=fun(x1,x2);fxa=diff(fun1,'a');a=solve(fxa);xk1=inline(xk1);xk1=feval(xk1,a);xk1(1)=eval(xk1(1));xk1(2)=eval(xk1(2));syms x1;syms x2;fun1=fun(x1,x2);fun1=inline(fun1);f1=feval(fun1,xk1(1),xk1(2)); f1=eval(f1);Inc(1)=f0-f1;%沿d2方向进行搜索syms a;syms x1;syms x2;xk2=xk1+a*d(:,2);x1=xk2(1);x2=xk2(2);fun1=fun(x1,x2);fxa=diff(fun1,'a');a=solve(fxa);xk2=inline(xk2);xk2=feval(xk2,a);xk2(1)=eval(xk2(1));xk2(2)=eval(xk2(2));syms x1;syms x2;fun1=fun(x1,x2);fun1=inline(fun1);f2=feval(fun1,xk2(1),xk2(2));f2=eval(f2);F2=f2;Inc(2)=f1-f2;[Incm,row]=max(Inc);x3=2*xk2-xk;%计算反射点syms x1;syms x2;fun1=fun(x1,x2);fun1=inline(fun1);f3=feval(fun1,x3(1),x3(2));f3=eval(f3);F3=f3;temp1=(F0-2*F2+F3)*(F0-F2-Incm)^2; temp2=0.5*Incm*(F0-F3)^2;%判断是否更换搜索方向if (F3<F0&&temp1<temp2)syms a;syms x1;syms x2;d(:,row)=xk2-xk;xk=xk2+a*d(:,row);x1=xk(1);x2=xk(2);fun1=fun(x1,x2);fxa=diff(fun1,'a');a=solve(fxa);xk=inline(xk);xk=feval(xk,a);%不更换搜索方向else if F2<F3xk=xk2;elsexk=x3;endendxkerror=eval(xk2-xktemp); ae=norm(xkerror);k=k+1;endx=eval(xk)函数程序:function [f]=fun(x1,x2)f=2*x1^2+4*x1*x2+x2^2执行结果:x =四、实验小结通过本实验了解了了matlab的基本操作方法,了解鲍威尔法的原理与基本运用。
一维正态分布参数求解matlab

一维正态分布参数求解matlab
要求解一维正态分布的参数,可以使用matlab中的fitdist函数。
该函数可以根据给定的一维数据拟合正态分布,并返回拟合所得的参数。
具体的步骤如下:1. 准备一维数据。
可以将数据存储在一个向量中或者直接输入数据点的值。
2. 使用fitdist函数来拟合正态分布。
函数的输入参数为数据向量和所需的分布类型。
对于正态分布,可以选择'Normal'作为分布类型。
3. fitdist函数会返回一个拟合对象。
可以通过该对象的方法和属性来获取所求的参数,如均值、标准差等。
以下是一个示例代码:matlab% 准备数据data = [1.2, 2.4, 3.8, 4.5, 6.1, 7.2, 8.6, 9.7];% 拟合正态分布并获取参数fitObj = fitdist(data, 'Normal');mu = fitObj.mu;sigma = fitObj.sigma;上述代码将数据data拟合为正态分布,并通过fitObj.mu和fitObj.sigma获取拟合所得的均值和标准差。
需要注意的是,fitdist函数还可以拟合其他类型的分布,而不仅限于正态分布。
可以根据具体需求选择合适的分布类型。
一维信号去噪方法及matlab方法
一维信号去噪方法及matlab方法
一维信号去噪方法及MATLAB实现步骤如下:
一维信号去噪方法:
1. 小波变换:利用小波变换对信号进行多尺度分析,保留有用信号的小波系数,去除噪声的小波系数,最后重构信号。
2. 滤波器:设计合适的滤波器,使噪声信号经过滤波器后被滤除,保留有用信号。
常用的滤波器有中值滤波器、低通滤波器、高通滤波器等。
3. 统计方法:利用统计方法对信号进行概率统计,根据信号和噪声的不同统计特性进行去噪。
常用的统计方法有均值滤波、加权均值滤波、中位数滤波等。
4. 频域变换:将信号从时域变换到频域,利用信号和噪声在频域的不同特性进行去噪。
常用的频域变换方法有傅里叶变换、小波变换等。
MATLAB实现步骤:
1. 导入信号:使用MATLAB中的函数读取一维信号数据。
2. 预处理:对信号进行必要的预处理,如平滑处理、去除异常值等。
3. 去噪处理:根据选择的方法对信号进行去噪处理,如小波变换去噪、滤波器去噪、统计方法去噪或频域变换去噪等。
4. 后处理:对去噪后的信号进行必要的后处理,如数据归一化、插值等。
5. 显示结果:使用MATLAB中的绘图函数将原始信号、噪声信号和去噪后的信号进行可视化比较。
6. 保存数据:将去噪后的数据保存到文件中,方便后续分析。
需要注意的是,不同的一维信号去噪方法适用于不同类型的噪声和信号,应根据实际情况选择合适的方法。
同时,MATLAB提供了丰富的函数和工具箱,可以方便地实现各种一维信号去噪处理。
一维搜索方法与MATLAB实现
例3-1 利用进退法求函数52)(24+--=t t t t f 的极值区间,取初始点为0,步长为1.0。
解:在MA TLAB 命令窗口输入主函数syms tf=t^4-t^2-2*t+5;[x1,x2]=minJT(f,0,0.1)进退法确定搜索区间函数文件minJT 如下:function [minx,maxx]=minJT(f,x0,h0,eps)%目标函数:f;%初始点:x0;%初始步长:h0;%精度:esp;%区间左端点:minx;%区间右端点:maxx;format long;if nargin==3esp=1.0e-6;endx1=x0;k=0;h=h0;while 1x4=x1+h;%试探步 k=k+1;f4=subs(f,findsym(f),x4);f1=subs(f,findsym(f),x1);if f4<f1x2=x1;x1=x4;f2=f1;f1=f4;h=2*h;%加大步长 elseif k==1h=-h;%反向搜索 x2=x4;f2=f4;elsex3=x2;x2=x1;x1=x4;break;endendendminx=min(x1,x3);maxx=x1+x3-minx;format short;M函数文件的运行结果如下x1 = 0.3000x2 = 1.5000================================================================== 例3-2 MA TLAB实现,用M函数文件形式求解:syms t;f=t^2-10*t+36;[x,fx]=minHJ(f,-10,10)黄金分割法一维搜索函数文件minHJ如下:function [x,minf]=minHJ(f,a,b,eps)%目标函数:f;%搜素区间左端点:a;%搜索区间右端点:b;%精度:eps;%目标函数取最小值时自变量值:x;%目标函数的最小值:minf;format long;if nargin==3eps=1.0e-6;endl=a+0.382*(b-a); %试探点u=a+0.618*(b-a); %试探点k=1;tol=b-a;while tol>eps && k<100000fl=subs(f,findsym(f),l); %试探点函数值fu=subs(f,findsym(f),u); %试探点函数值if fl>fua=l; %改变区间左端点l=u;u=a+0.618*(b-a); %缩小搜索区间elseb=u; %改变区间右端点u=l;l=a+0.382*(b-a); %缩小搜索区间endk=k+1;tol=abs(b-a);endif k==100000disp('找不到最优点!');x=NaN;minf=NaN;return;endx=(a+b)/2;minf=subs(f,findsym(f),x);format short;M函数文件的运行结果如下:x = 5.0000fx =11.0000=============================================================== 例3-3 MA TLAB实现,用M函数文件形式求解:syms t;f=sin(t);[x,fx]=minPWX(f,4,5)二次插值法一维搜索函数文件minPWX如下:function [x,minf]=minPWX(f,a,b,eps)%目标函数:f;%初始收缩区间左端点:a;%初始收缩区间左端点:b;%精度:eps;%目标函数取最小值时的自变量:x;%目标函数的最小值:minfformat long;if nargin==3eps=1.0e-6;endt0=(a+b)/2;k=0;tol=1;while tol>epsfa=subs(f,findsym(f),a); %搜索区间左端点函数值fb=subs(f,findsym(f),b); %搜索区间右端点函数值ft0=subs(f,findsym(f),t0); %内插点函数值tu=fa*(b^2-t0^2)+fb*(t0^2-a^2)+ft0*(a^2-b^2);td=fa*(b-t0)+fb*(t0-a)+ft0*(a-b);t1=tu/2/td; %插值多项式的极小点ft1=subs(f,findsym(f),t1); %插值多项式的极小值tol=abs(t1-t0);if ft1<=ft0if t1<=t0b=t0; %更新搜索区间右端点t0=t1; %更新内插点elsea=t0; %更新搜索区间左端点t0=t1; %更新内插点endk=k+1;elseif t1<=t0a=t1;elseb=t1;endk=k+1;endendx=t1;minf=subs(f,findsym(f),x);format short;M函数文件的运行结果如下:x = 4.7124fx = -1.0000================================================================ 例3-4 MA TLAB实现,用M函数文件形式求解:syms t;f=t^4-4*t^3-6*t^2-16*t+4;[x,fx]=minNewton(f,3)牛顿法一维搜索函数文件minNewton如下function [x,minf]=minNewton(f,x0,eps)%目标函数:f;%初始点:x0;%精度:eps;%目标函数取最小值时的自变量:x;%目标函数的最小值:minfformat longif nargin==2eps=1.0e-6;enddf=diff(f); %一阶导数d2f=diff(df); %二阶导数k=0;tol=1;while tol>epsdfx=subs(df,findsym(df),x0); %一阶导数值d2fx=subs(d2f,findsym(d2f),x0); %二阶导数值x1=x0-dfx/d2fx;k=k+1;tol=abs(dfx);x0=x1;endx=x1;minf=subs(f,findsym(f),x);format short;M 函数文件的运行结果如下:x =4fx = -156==================================================================例3-5用fminbnd 求函数1)(24-+-=x x x x f 在区间]1,2[-上极小值。
用一维搜索方法(0618法)来寻求单谷函数极小点
1999 级 数学与应用数学 计算数学 孔坤 邵安琦 9920001 9920012
我们用 matlab6.0 编的以下程序: f=input(‘请输入函数 f(x):’); a=input(‘请输入单谷区间的左端点 a:’); b=input(‘请输入单谷区间的右端点 b:’); N=input(‘请输入迭代次数 N:’); tol=input(‘请输入允许误差 tol:’); root=silver(f,a,b,N,tol) syms x; t1=a+0.382*(b-a); t2=a+0.618*(b-a); f1=subs(f,x,t1); f2=subs(f,x,t2); for i=1:N if f1<=f2 if (t1-a)<=tol root=t1; break; else b=t2; t2=t1; t1=b-0.618*(b-a); f2=f1; f1=subs(f,x,t1); end end if f1>f2 if (b-t1)<=tol root=t2; break; else a=t1; t1=t2; t2=a+0.618*(b-a); f1=f2; f2=subs(f,x,t2); end end end if (i==N) root=’error!’;
yes no b=t2;t2=t1 t1=b-0.618*(b-a) f(t2)=f(t1) 输出 t1 b-t1<=tol no a=t1;t1=t2 t2=a+0.618*(b-a) f(t1)=f(t2) 输出 t N’) end 然后我们用书上 110 页例 4.3.1 验证该程序: 先让迭代次数等于 3,未得到结果,因为迭代次数太少 kk2 请输入函数 f(x):’x^3-2*x+1’ start 请输入单谷区间的左端点 a:0 请输入单谷区间的右端点 b:3 请输入迭代次数 N:3 请输入 f,a,b,N,tol 请输入允许误差 tol:0.5 迭代轮数太少,请增加 N root=error! 计算 t1,t2, f(t1),f(t2) 再让迭代次数等于 4,得结果: kk2 请输入函数 f(x):’x^3-2*x+1’ 请输入单谷区间的左端点 a:0 请输入单谷区间的右端点 b:3 f(t1)<=f(t2) 请输入迭代次数 N:4 请输入允许误差 tol:0.5 root=0.8755 这与书上结果 0.876 吻合。 yes no 右面是我们的程序流程图: t2-a<=tol
matlab 非条件极值

matlab 非条件极值Matlab是一种功能强大的数学软件,它提供了许多用于求解非条件极值的函数和工具。
非条件极值是指在不受任何约束条件限制的情况下,寻找一个函数的最大值或最小值。
在本文中,我将介绍一些常用的非条件极值求解方法,并说明如何在Matlab中使用这些方法。
我们来介绍一种常用的非条件极值求解方法,即一维搜索法。
在一维搜索法中,我们通过在给定区间内不断缩小搜索范围,来找到函数的最大值或最小值。
在Matlab中,可以使用fminbnd函数来实现一维搜索法。
该函数的用法如下:x = fminbnd(fun,x1,x2)其中,fun是要求解极值的函数,x1和x2是搜索区间的起始点和终止点。
通过调用fminbnd函数,我们可以得到函数在指定区间内的最小值对应的自变量x。
除了一维搜索法,Matlab还提供了其他一些求解非条件极值的方法。
例如,可以使用fminsearch函数来进行多维搜索。
该函数的用法与fminbnd函数类似,只是需要指定多个自变量。
另外,如果我们希望使用梯度信息来加速极值的搜索过程,可以使用fminunc函数。
该函数可以利用函数的梯度信息来选择搜索方向,并在每一步中更新自变量的取值。
除了上述方法,Matlab还提供了一些其他的非条件极值求解函数,如fmincon和fminimax等。
这些函数可以用于处理更加复杂的极值求解问题,例如带有约束条件或多个目标函数的情况。
在实际应用中,非条件极值求解在很多领域都有广泛的应用。
例如,在金融领域中,我们可以利用非条件极值求解来寻找最优投资组合;在工程领域中,我们可以利用非条件极值求解来进行优化设计。
此外,非条件极值求解还可以应用于数据拟合、信号处理、机器学习等各种领域。
Matlab提供了许多用于求解非条件极值的函数和工具。
通过这些函数和工具,我们可以方便地求解各种非条件极值问题,并在实际应用中取得良好的效果。
希望本文能够帮助读者更好地理解和应用非条件极值求解方法。
条码检测系统——基于MATLAB的一维条码识别

条码检测系统——基于MATLAB的⼀维条码识别条码检测系统——基于MATLAB的⼀维条码识别摘要:条码技术是如今应⽤最⼴泛的识别和输⼊技术之⼀,由于其包含的信息量⼤,识别错误率低⽽在各个⽅⾯得到很⼤的重视。
它发展迅速并被⼴泛应⽤于于⼯业、商业、图书出版、医疗卫⽣等各⾏各业。
由我国⽬前发展现状来看,条码的正常使⽤受到条形码印刷质量和商品运输过程的影响,并且传统的条码识读⽅式是采⽤光电识读器,条码图像对光的不同反射效果也必然会对条码的识读产⽣影响,⽽⼀般条码在搬运过程中条码会不可避免的破损,所以对质量较差的条码的条码的识别尤为重要。
不同的条码有着不同的识读过程。
本设计研究⼀种基于图像处理⽅式的识读⽅法,通过计算机辨识来解决条码印刷质量不佳和条码变形等问题。
该⽅法是采⽤摄像头采集条码图像,通过照相采集条码图像的⽅法避免了线性扫描器逐⾏扫描所产⽣的问题,同时简化了扫描条码图像的操作。
然后通过⼀定的数字图像处理算法处理进⾏译码。
译码算法主要分为两部分:第⼀部分⾸先对采集的条码图像进⾏预处理,图像的预处理包括图像分割,图像滤波等,良好的图像处理将对后⾯实现正确译码有重⼤贡献;第⼆部分就是对预处理后的条码图像进⾏译码,我们根据相似边距离来判别条码字符,再通过译码、校验、纠错处理来识读条码,得到条码所表⽰的⽂本信息。
与⽤条码识读器硬件进⾏译码相⽐,软件译码具有更⼤的灵活性和较低的成本,所以具有很⼤的市场空间。
借助于matlab软件的功能我们完成这次译码⼯作。
关键词:图像处理图像分割条形码识别 EAN-13 相似边距识别图像滤波MatlabThe System Of Bar-Code Examination——1D Bar-Code recognition based on MATLABAbstract: Nowadays Bar-Code is a very popular technique ofidentification and input. It has been taken serious because of it’s large information and low error rate. It develops very quickly and has already been applied in industry,忽略merce,publishing,medical sanitation and so on. It can be seen from the actualities in our country that the use of Bar-Code is influenced by the printing quality and goods transportation, and besides, the traditional mode of recognition is using optical scanner so that the recognitinon will be consequentially affected by the different reflection of code image by the light. The general course of the removal barcode bar code will inevitably damage, so poor quality bar code bar code identification is particularly important.Different Bar-Code has different recognition process. This paper researches into a method based on digital image processing mode to resolve the problems of poor printing quality and code distortion, which uses the vidicon to take pictures of code images so as to avoid the traditional questions brought by the line-by-line scanning. And then applies the digital image processing algorithms to recognize the code, which includes two steps: the first is image pretreatments, the second is using statistic method and the distance of edge to similar edge method to recognize the code character. 忽略paring with decoding with special Bar-Code identification hardware, decoding with software is more flexible, and the cost is also 忽略paratively low. Hence, Bar-Code has a very clear future of development. This research is realized by Matlab.Key word: image processing, Bar-Code recognition, EAN-13, the distance of edge to similar edge, image filters,Matlab⽬录第1章引⾔ (01)1.1 条码技术概述 (01)1.2 Matlab应⽤图像处理 (02)1.3本⽂的研究意义及内容 (03)1.3.1 研究意义 (03)1.3.2 研究内容及本⽂的组织安排 (04)第2章⼀维条码技术 (05)2.1 ⼀维条码的简介 (05)2.2 ⼀维条码符号的结构 (05)2.3 EAN码简述 (06)2.4 EAN-13码符号的特征 (07)2.4.1 EAN-13码字符集 (08)2.4.2 EAN-13码符号结构 (09)2.5 EAN-13码的校验纠错 (11)第3章条码图像的预处理............................. . (12)3.1 图像分割理论 (12)3.1.1 图像分割的定义 (12)3.1.2 图像分割的算法类 (13)3.1.3 图像分割结果 (14)3.2 图像灰度及⼆值化 (15)3.3 图像加噪仿真 (16)3.3 图像的滤波 (16)3.3.1 图像的平滑滤波 (16)3.3.2 形态学滤波 (17)第4章条码的译码⽅法 (20)4.1 译码⽅案的选择 (20)4.2 相似边距法介绍 (21)4.3. 条码字符的判别 (22)第5章条码译码的基本原理 (25)5.1 EAN_13的译码原理分析 (25)5.2译码结果分析 (26)第6章结论 (28)参考⽂献 (30)附录 (36)第1章引⾔1.1 条码技术概述在信息时代的今天,计算机的应⽤⼰和我们的⽣活紧密地联系在⼀起。
powell法matlab程序

powell法matlab程序Powell法是一种用于求解无约束最优化问题的迭代优化算法。
它通过逐步旋转坐标轴的方式来寻找函数的最小值点。
在本文中,我们将详细介绍Powell法的原理和应用,并提供MATLAB程序实现。
Powell法的基本思想是通过旋转坐标轴的方式,将多维优化问题转化为一维优化问题。
这种方法通过变换坐标轴,将迭代过程中的每次更新只涉及到一个变量,从而降低了计算的复杂性。
Powell法在某些问题上比前一种单纯形装囊法更加高效。
下面是我们使用MATLAB实现Powell法的步骤:步骤1:定义目标函数首先,我们需要定义目标函数。
目标函数可以是任何连续可导的函数。
在MATLAB中,我们可以通过函数句柄(即指向目标函数的指针)来表示目标函数。
例如,我们可以定义一个简单的目标函数如下:matlabfunction f = myFunction(x)目标函数为x^2 + 2*x + 1f = x.^2 + 2.*x + 1;end步骤2:初始化参数接下来,我们需要初始化Powell法的参数。
这些参数包括初始点的位置和搜索方向。
我们可以选择任意合适的初始点,以及初始搜索方向。
例如,我们可以将初始点的位置设置为(1, 1)。
matlab初始点的位置x0 = [1, 1];初始搜索方向d = [1, 0];步骤3:定义搜索函数我们还需要定义一个搜索函数,用于根据当前位置和搜索方向来计算最佳的步长。
在Powell法中,可以使用一维搜索方法来寻找步长。
这里,我们可以使用黄金分割法(golden section method)来实现。
matlabfunction [alpha, val] = lineSearch(x, d)黄金分割法的参数rho = (sqrt(5) - 1) / 2;epsilon = 1e-6;定义目标函数f = (t) myFunction(x + t.*d);在初始区间上进行黄金分割法搜索a = 0;b = 1;h = b - a;c = a + rho.*h;d = b - rho.*h;while (h > epsilon)if (f(c) < f(d))b = d;elsea = c;endh = b - a;c = a + rho.*h;d = b - rho.*h;endalpha = (a + b) / 2;val = f(alpha);end步骤4:实现Powell法迭代算法现在,我们可以基于上述步骤定义Powell法的主迭代算法。
matlab编程实现求解最优解

《现代设计方法》课程关于黄金分割法和二次插值法的Matlab语言实现在《现代设计方法》的第二章优化设计方法中有关一维搜索的最优化方法的一节里,我们学习了黄金非分割法和二次插值法。
它们都是建立在搜索区间的优先确定基础上实现的。
为了便于方便执行和比较,我将两种方法都写进了一个程序之内,以选择的方式实现执行其中一个。
下面以《现代设计方法》课后习题为例。
见课本70页,第2—7题。
原题如下:求函数f(x)=3*x^2+6*x+4的最优点,已知单谷区间为[-3,4],一维搜索精度为0.4。
1、先建立函数f(x),f(x)=3*x^2+6*x+4。
函数文件保存为:lee.m源代码为:function y=lee(x)y=3*x^2+6*x+4;2、程序主代码如下,该函数文件保存为:ll.mclear;a=input('请输入初始点');b=input('请输入初始步长');Y1=lee(a);Y2=lee(a+b);if Y1>Y2 %Y1>Y2的情况k=2; Y3=lee(a+2*b);while Y2>=Y3 %直到满足“大,小,大”为止k=k+1;Y3=lee(a+k*b);endA=a+b;B=a+k*b;elseif Y1<Y2 %Y1<Y2的情况k=1;Y3=lee(a-k*b);while Y1>=Y3 %直到满足“大,小,大”为止k=k+1;Y3=lee(a-k*b);endA=a-k*b;B=a;elseA=a;B=a+b; %Y1=Y2的情况enddisp(['初始搜索区间为',num2str([A,B])])%输出符合的区间xuanze=input('二次插值法输入0,黄金分割法输入1');%选择搜索方式T=input('选定一维搜索精度');if xuanze==1while B-A>T %一维搜索法使精度符合要求C=A+0.382*(B-A);D=A+0.618*(B-A); %黄金分割法选点if lee(C)>=lee(D); %缩小区间A=C;elseB=D;endendelsewhile B-A>T %二次插值法是精度符合要求C=(A+B)/2;W=[1,A,A^2;1,B,B^2;1,C,C^2];w=[lee(A);lee(B);lee(C)];x=W\w; %求线性方程组解,求拟合曲线xx=perms(x)';for n=1:(factorial(3)); %使解得值与a0,a1,a2一一对应t=1+(n-1)*3;a0=xx(t);a1=xx(t+1);a2=xx(t+2);if a0+a1*A+a2*A^2~=lee(A)||a0+a1*B+a2*B^2~=lee(B)...||a0+a1*C+a2*C^2~=lee(C);continueendbreakendxp=-a1/(2*a2); %拟合直线的最低点if lee(C)>=lee(xp); %缩小区间if C>=xp; %xp与C大小不定,导致缩小方式不同B=C;elseA=C;endelseif C>=xp;A=xp;elseB=xp;endendendendX=(A+B)/2;Y=lee(X);disp(['极小值点为',num2str(X),'极值为',num2str(Y)]);%输出结果3、由于我编的程序,其搜索区间是自定的。
最优化方法的Matlab实现(公式完整版)

第九章最优化方法的Matlab实现在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。
最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。
由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。
用最优化方法解决最优化问题的技术称为最优化技术,它包含两个方面的内容:1)建立数学模型即用数学语言来描述最优化问题。
模型中的数学关系式反映了最优化问题所要达到的目标和各种约束条件。
2)数学求解数学模型建好以后,选择合理的最优化方法进行求解。
最优化方法的发展很快,现在已经包含有多个分支,如线性规划、整数规划、非线性规划、动态规划、多目标规划等。
9.1 概述利用Matlab的优化工具箱,可以求解线性规划、非线性规划和多目标规划问题。
具体而言,包括线性、非线性最小化,最大最小化,二次规划,半无限问题,线性、非线性方程(组)的求解,线性、非线性的最小二乘问题。
另外,该工具箱还提供了线性、非线性最小化,方程求解,曲线拟合,二次规划等问题中大型课题的求解方法,为优化方法在工程中的实际应用提供了更方便快捷的途径。
优化工具箱中的函数优化工具箱中的函数包括下面几类:1.最小化函数表9-1 最小化函数表2.方程求解函数表9-2 方程求解函数表3.最小二乘(曲线拟合)函数表9-3 最小二乘函数表4.实用函数表9-4 实用函数表5.大型方法的演示函数表9-5 大型方法的演示函数表6.中型方法的演示函数表9-6 中型方法的演示函数表参数设置利用optimset函数,可以创建和编辑参数结构;利用optimget函数,可以获得o ptions优化参数。
● optimget函数功能:获得options优化参数。
语法:val = optimget(options,'param')val = optimget(options,'param',default)描述:val = optimget(options,'param') 返回优化参数options中指定的参数的值。
黄金分割法二次插值法牛顿法matlab程序一维搜索方法比较
牛顿法求解 n 的平方根求解 n 的平方根,其实是求方程 x2−n=0 的解利用上 面的公式可以得到:xi+1=xi−x2i−n2xi=(xi+nxi)/2 编程的时候核心的代码是:x = (x + n/x)/2 三、二次插值法
二次插值法亦是用于一元函数 在确定的初始区间内搜索极小点的一种 方法。它属于曲线拟合方法的范畴。
t=
0.0283
公元前 4 世纪,古希腊数学家欧多克索斯第一个系统研究了这一问题,并建 立起比例理论。
公元前 300 年前后欧几里得撰写《几何原本》时吸收了欧多克索斯的研究成 果,进一步系统论述了黄金分割,成为最早的有关黄金分割的论著。
中世纪后,黄金分割被披上神秘的外衣,意大利数家帕乔利称中末比为神圣 比例,并专门为此著书立说。德国天文学家开普勒称黄金分割为神圣分割。
左边的区间距离 0.0402
黄金分割法所得最小极值点为:-0.993642 黄金分割法所得最小极值为:-0.999960 迭代次数为:9.000000 右边的区间距离 0.0249
左边的区间距离 0.0249
黄金分割法所得最小极值点为:-1.013756 黄金分割法所得最小极值为:-0.999811 迭代次数为:10.000000 右边的区间距边的区间距离 0.7214
左边的区间距离 0.7212
黄金分割法所得最小极值点为:-0.888304 黄金分割法所得最小极值为:-0.987524 迭代次数为:3.000000 右边的区间距离 0.4459
左边的区间距离 0.4459
黄金分割法所得最小极值点为:-1.249028 黄金分割法所得最小极值为:-0.937985 迭代次数为:4.000000 右边的区间距离 0.2755
matlab中数组索引

matlab中数组索引一、一维数组索引在matlab中,一维数组可以通过索引来访问数组元素。
数组索引是指数组中每个元素的唯一标识符。
数组索引从1开始,依次递增,直到数组的长度为止。
例如,一个长度为5的一维数组的索引为1,2,3,4,5。
通过数组索引访问数组元素的方法如下所示:假设有一个数组a,要访问其第3个元素,可以使用如下语句:a(3)这将返回数组a中的第3个元素。
同样,可以通过a(1)、a(2)、a(4)等语句来访问数组a中的其他元素。
二、多维数组索引除了一维数组,matlab还支持多维数组。
多维数组的每个元素需要多个索引来标识。
例如,一个二维数组需要两个索引,一个三维数组需要三个索引,以此类推。
在matlab中,多维数组的索引可以使用如下语法:a(i,j)或a(i,j,k)其中,i、j、k等表示数组的各个维度的索引值。
例如,对于一个二维数组a,要访问其第2行、第3列的元素,可以使用如下语句:a(2,3)这将返回数组a中第2行、第3列的元素。
三、逗号分隔的索引有时候,在多维数组中,我们需要访问多个元素,这些元素的索引值不连续。
这时,可以使用逗号分隔的索引来访问这些元素。
例如,对于一个二维数组a,要访问其第2行、第4列和第3行、第1列的元素,可以使用如下语句:a(2,4),a(3,1)这将返回数组a中第2行、第4列和第3行、第1列的元素。
四、冒号运算符在matlab中,冒号运算符可以用于生成一段连续的整数序列。
冒号运算符通常用于指定数组索引范围。
例如,假设有一个长度为10的一维数组a,要访问其前3个元素,可以使用如下语句:a(1:3)这将返回数组a中的第1个、第2个、第3个元素。
同样,可以使用如下语句来访问数组a中的其他元素:a(4:6) % 返回第4个、第5个、第6个元素a(7:end) % 返回从第7个元素到最后一个元素冒号运算符还可以用于多维数组的索引。
例如,对于一个二维数组a,要访问其第2行的所有元素,可以使用如下语句:a(2,:)这将返回数组a中第2行的所有元素。
【MATLAB与机械设计】一维优化进退法确定初始区间
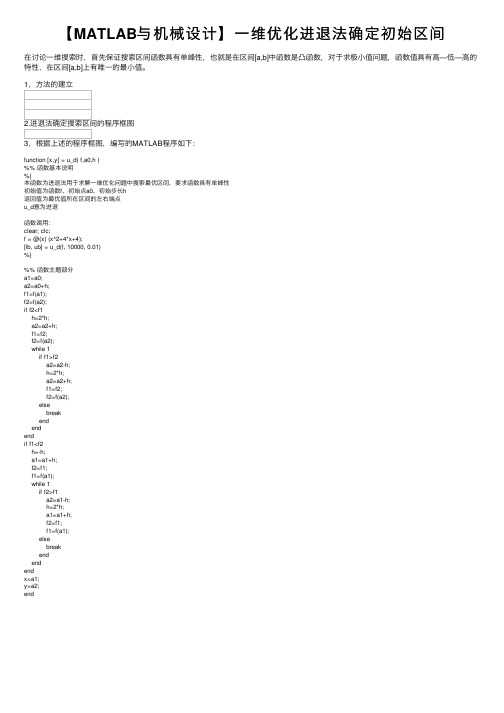
【MATLAB与机械设计】⼀维优化进退法确定初始区间在讨论⼀维搜索时,⾸先保证搜索区间函数具有单峰性,也就是在区间[a,b]中函数是凸函数,对于求极⼩值问题,函数值具有⾼—低—⾼的特性,在区间[a,b]上有唯⼀的最⼩值。
1,⽅法的建⽴2.进退法确定搜索区间的程序框图3,根据上述的程序框图,编写的MATLAB程序如下:function [x,y] = u_d( f,a0,h )%% 函数基本说明%{本函数为进退法⽤于求解⼀维优化问题中搜索最优区间,要求函数具有单峰性初始值为函数f、初始点a0、初始步长h返回值为最优值所在区间的左右端点u_d意为进退函数调⽤:clear; clc;f = @(x) (x^2+4*x+4);[lb, ub] = u_d(f, 10000, 0.01)%}%% 函数主题部分a1=a0;a2=a0+h;f1=f(a1);f2=f(a2);if f2<f1h=2*h;a2=a2+h;f1=f2;f2=f(a2);while 1if f1>f2a2=a2-h;h=2*h;a2=a2+h;f1=f2;f2=f(a2);elsebreakendendendif f1<f2h=-h;a1=a1+h;f2=f1;f1=f(a1);while 1if f2>f1a2=a1-h;h=2*h;a1=a1+h;f2=f1;f1=f(a1);elsebreakendendendx=a1;y=a2;end。
matlab unique 函数

matlab unique 函数一、unique函数语法MATLAB中的unique函数的语法如下:```matlab[C,ia,ic] = unique(A)```A是一个一维向量或一个可用于创建一维向量的矩阵,C是包含输入矢量的唯一元素的向量,ia是包含输入矢量中的唯一元素的索引,ic是A中包含C中每个元素的索引。
二、unique函数功能unique函数的作用是在向量(或矩阵的一维)中找到唯一的元素,并返回一个包含这些唯一元素的向量。
这在处理数据时非常有用,特别是当需要对数据进行去重处理时。
三、unique函数用法1.基本用法unique函数最常见的用法是去重。
我们可以通过如下代码实现去重操作:```matlabA = [1 2 3 4 3 2 1];B = unique(A);```在这个例子中,从A中去掉重复的元素,并将结果保存在向量B中。
现在B的值为 [1 2 3 4]。
2.索引操作unique函数还可以返回输入矢量中每个唯一元素的索引,方法是在调用unique函数时附加第二个输出参数:ia。
```matlab[C,ia,ic] = unique(A);在这个代码中,ia是包含输入矢量中的唯一元素的索引向量。
可以使用ia向量来访问原始矢量中的这些元素。
3.排序操作我们可以通过不同的方式对返回的唯一元素进行排序,包括按升序、降序或自定义顺序排序。
```matlabC = [4 2 3 1];B = unique(A, 'sorted'); % 默认升序排列B = unique(A, 'sorted', 'descend'); % 降序排列B = unique(A, 'sorted', C); % 根据向量C中的元素自定义排序```在这些代码中,第一个例子按升序排列唯一的元素。
第二个例子按降序排列唯一的元素。
第三个例子根据向量C中的元素进行自定义排序。
第二部分:03第三章 一维搜索方法
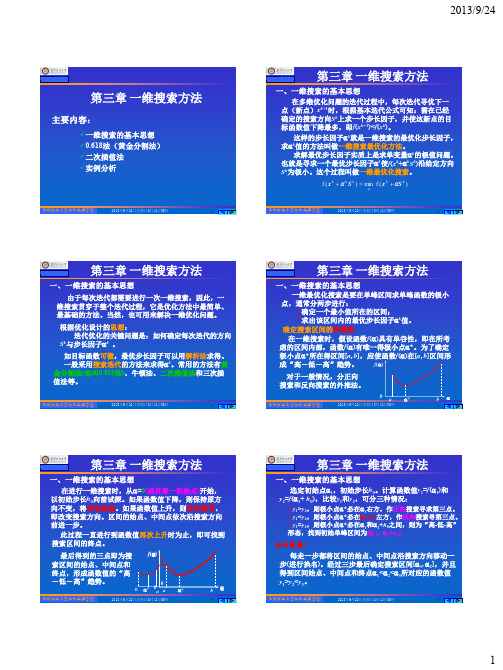
一、一维搜索的基本思想
选定初始点1,初始步长h0。计算函数值y1=f(1)和 y2=f(1+ h0),比较y1和y2,可分三种情况:
y1>y2,则极小点*必在1右方,作正向搜索寻求第三点。 y1<y2,则极小点*必在1+h0左方,作反向搜索寻第三点。 y1=y2,则极小点*必在1和1+h0之间,则为“高-低-高” 形态,找到初始单峰区间为[1 , 1+h0]
y 2 y1
1
y3
3
h0
O
22 2 1 1 1
h0
2013年9月22日星期日8时42分35秒
2013年9月22日星期日8时42分36秒
8
第 2 部分:优化设计
第三章 一维搜索方法
y
y3
y1 y1 2 y2
y 2 y y3 3
第 2 部分:优化设计
第三章 一维搜索方法
昆明理工大学机电工程学院
一、一维搜索的基本思想
一维最优化搜索是要在单峰区间求单峰函数的极小 点,通常分两步进行: 确定一个最小值所在的区间; 求出该区间内的最优步长因子k值。 确定搜索区间的外推法 在一维搜索时,假设函数f()具有单谷性,即在所考 虑的区间内部,函数f()有唯一得极小点*。为了确定 极小点*所在得区间[a, b],应使函数f()在[a, b]区间形 f() 成“高-低-高”趋势。 对于一般情况,分正向 搜索和反向搜索的外推法。
*
b
5
2013年9月22日星期日8时42分35秒
1
2013/9/24
第 2 部分:优化设计
第三章 一维搜索方法
第 2 部分:优化设计
一维搜索的最优方法(黄金分割法)
05 黄金分割法的应用举例
在函数优化中的应用
一元函数优化
黄金分割法可用于一元函数的极值求解,通过不断缩小搜索区间来逼近最优解。
多元函数优化的辅助手段
在多元函数优化中,黄金分割法可作为辅助手段,用于一维搜索或线搜索过程。
在工程问题中的应用
结构设计优化
在结构设计中,黄金分割法可用于寻 找最优的结构参数,如梁、柱的截面 尺寸等,以实现结构性能和经济性的 平衡。
二分法每次迭代将搜索区间减半,而黄金分割法每次迭代将搜索区间缩小为原来的约 0.618倍。在收敛速度上,二分法通常比黄金分割法更快。但二分法要求函数在搜索区间 内连续且单调,而黄金分割法则没有这样的限制。
与牛顿法相比
牛顿法是一种基于导数信息的搜索方法,具有较快的收敛速度。但在一维搜索问题中,当 导数信息不可用或难以获取时,黄金分割法则更为适用。此外,牛顿法对初始点的选择较 为敏感,而黄金分割法则相对稳健。
解决一维搜索问题的方法有多种,其中黄金分割法是一种较为常用且有效的方法。
黄金分割法简介
黄金分割法是一种通过不断缩小搜索 区间来逼近函数极小值点的方法。
黄金分割法具有简单、快速、稳定等 优点,适用于单峰函数的一维搜索问 题。
它在每次迭代中,通过比较区间两个 端点处的函数值,来确定下一步的搜 索区间。
黄金分割点
在一条线段上,按照黄金分割比 例将线段分割成两部分,分割点
即为黄金分割点。
函数图像
对于一元函数,可以将其图像视 为一条曲线。黄金分割法通过不 断在曲线上选取试探点来逼近最
优解。
搜索区间缩小
每次迭代后,根据试探点的函数 值比较结果,将搜索区间缩小,
使得下一步的搜索更加精确。
黄金分割法的算法步骤
最速下降法matlab代码

最速下降法matlab代码最速下降法(Steepest Descent Method)是一种优化算法,用于求解无约束最优化问题。
下面是一个使用MATLAB实现最速下降法的代码示例:```matlabfunction x = steepest_descent(f, grad_f, x0, tol, max_iter)% f: 目标函数% grad_f: 目标函数的梯度% x0: 初始点% tol: 迭代停止的容差% max_iter: 最大迭代次数x = x0; % 初始点iter = 0; % 迭代次数while norm(grad_f(x)) > tol && iter < max_iterp = -grad_f(x); % 计算搜索方向% 一维搜索,选择合适的步长alphaalpha = backtracking_line_search(f, grad_f, x, p);x = x + alpha * p; % 更新变量xiter = iter + 1;endendfunction alpha = backtracking_line_search(f, grad_f, x, p, alpha0, rho, c)% f: 目标函数% grad_f: 目标函数的梯度% x: 当前点% p: 搜索方向% alpha0: 初始步长% rho: 减小步长的比例因子% c: Armijo-Goldstein条件的常数因子if nargin < 6rho = 0.5; % 默认减小步长的比例因子endif nargin < 7c = 0.1; % 默认Armijo-Goldstein条件的常数因子endalpha = alpha0; % 初始步长while f(x + alpha * p) > f(x) + c * alpha * grad_f(x)' * palpha = rho * alpha; % 减小步长endend```在上述代码中,`steepest_descent`函数实现了最速下降法的主要逻辑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、实验原理
(1)鲍威尔基本算法(参见课本P83—84)。
(2)鲍威尔改进算法:在鲍威尔基本算法中,每一轮迭代都用连结始点和终点所产生出的搜索方向去替代原向量组中的第一个向量,而不管它的“好坏”,这是产生向量组线性相关的原因所在。因此在改进的算法中首先判断原向量组是否需要替换。如果需要替换,还要进一步判断原向量组中哪个向量最坏,然后再用新产生的向量替换这个最坏的向量,以保证逐次生成共轭方向。具体步骤详见课本P85。
{
a=research(x,e,++c); /*调用函数得步长,至此c=2*/
add(x,e,x,a,i); /*调用函数求沿始点和终点连线方向搜索点坐标值*/
replace1(x,i); /*最后点的坐标替代始点的坐标以作为下一轮搜索的起点*/
deldm(e,mark); /*调用函数除去em向量*/
}
a=t1; b=t3;
a1=b-k*(b-a); t=a1;
q1=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6);
a2=a+k*(b-a); t=a2;
while(y3<y2)
{
h=2*h;
t1=t2; y1=y2; t2=t3; y2=y3;
t3=t2+h; t=t3;
y3=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6);
double *cut2(double a[][M],double b[][M],double c[][M],int i)
{
int e,h;
h=i-1;
for(e=0;e<M;e++)
{
c[i][e]=2*a[h][e]-b[0][e];
}
} /*自定义函数4:矩阵减运算2*/
double research(double aa[][M],double bb[][M],int i)
h=-h; t3=t1; y3=y1;
t1=t2; y1=y2; t2=t3; y2=y3; /*换名*/
}
t3=t2+h; t=t3;
y3=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6);
n=(q2-q1)/q2; if(n<0) n=-n;
}
za=(a+b)/2;
printf("za=%f\n",za); /*输出步长值*/
return za;
} /*自定义函数5:求解步长*/
double maximun(double a[M])
{
int j;
double max;
max=a[0];
for(j=0;j<M;j++)
{
if(max<a[j])
max=a[j]; /*查找最大数并附值给max*/
}
return max;
} /*自定义函数6:找最大差值*/
int sign(double d[M])
{
int j,mark=0;
double max;
max=d[0];
for(j=0;j<M;j++)
while(m>c&&n>c)
{
if(q1>=q2)
{
a=a1; a1=a2; q1=q2;
a2=a+k*(b-a); t=a2;
q2=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6);
return s;
} /*自定义函数8:求始点和终点间的距离*/
double *deldm(double e[][M],int mark)
{
int i,j,h;
for(i=mark;i<M+1;i++)
{
h=i+1;
for(j=0;j<M;j++)
{
e[i][j]=e[h][j];
}
}
} /*自定义函数9:除去em向量*/
}
} /*自定义函数12:反射点坐标替代始点坐标*/
main()
{
double x[][M]={{8.0,9.0}}; /*初始点赋值*/
double e[][M]={{1.0,0},{0,1.0}}; /*确定两个初始搜索方向*/
double a; /*定义步长因子*/
double optimunY; /*optimunY为所求最优函数值*/
姓名:楼金波学号:064090316
实验二无约束优化方法(改进的鲍威尔法)
一、实验目的
通过实验,进一步理解无约束优化的概念和各类方法的基本原理,同时锻炼学生运用理论知识解决实际问题的能力。
本次实验重点在于学会运用通用性较强的无约束优化方法——改进的鲍威尔法,来求解实际问题。
二、实验内容
用改进的鲍威尔法编程求解下述问题:
四、实验程序(改进的鲍威尔法,精度设为J=0.005)
#include "stdio.h"
#include "math.h"
#define J 0.005
#define M 2
#define N 100
double function(double x[][M],int i)
{
double s;
s=4*(x[i][0]-5)*(x[i][0]-5)+(x[i][1]-6)*(x[i][1]-6);
add(x,e,x,a,i); /*调用函数求搜索点坐标值*/
printf("x1newpoint=%f,x2newpoint=%f\n",x[i][0],x[i][1]); /*输出搜索点坐标*/
y[i]=function(x,i); /*调用函数该搜索点的函数值*/
d[c]=y[c]-y[i]; /*相邻两点函数值之差,程序运行到此后i=3、c=1*/
int j,h;
h=i-1;
for(j=0;j<M;j++)
{
x[0][j]=x[h][j];
}
} /*自定义函数11:终点坐标替代始点坐标*/
double *replace3(double x[][M],int i)
{
int j,h;
h=i;
for(j=0;j<M;j++)
{
x[0][j]=x[h][j];
s=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6); /*该点的函数表达式*/
t=t1;
y1=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6);
cut2(x,x,x,i); /*调用函数求反射点坐标值*/
printf("x1fanshe=%f,x2fanshe=%f\n",x[3][0],x[3][1]); /*输出反射点坐标值***************/
y[i]=function(x,i); /*调用函数求反射点函数值*/
f0=y[0];
}
else
{
b=a2; a2=a1; q2=q1;
a1=b-k*(b-a); t=a1;
q1=4*(aa[i][0]+t*bb[i][0]-5)*(aa[i][0]+t*bb[i][0]-5)+(aa[i][1]+t*bb[i][1]-6)*(aa[i][1]+t*bb[i][1]-6);
}
m=(b-a)/b; if(m<0) m=-m;
return s;
} /*自定义函数1:求函数值*/
double *add(double a[][M],double b[][M],double c[][M],double d,int i)
{
int e,h;
h=i-1;
for(e=0;e<M;e++)
{
c[i][e]=a[h][e]+d*b[h][e];
f2=y[--i]; i++;
f3=y[i]; /*反射点函数值赋给f3*/
maxd=maximun(d); /*调用函数求最大差值*/
mark=sign(d); /*调用函数求最大差值对应d在内存中的下标*/
if(f3<f0&&(f0-2*f2+f3)*(f0-f2-maxd)*(f0-f2-maxd)<0.5*maxd*(f0-f3)*(f0-f3))