Matlab在机械原理课程设计中的应用研究
Matlab运动仿真在机械原理课程设计中的应用

The Apply of Motion Simulation of Linkage Mechanism Base on SimMechanics During Mechanical Principle Course Designing
WANG Jun-Feng, TIAN Li-Ping (Dept. of Mechnicle Engineering,Luoyang Institude of Science and Technology , Luoyang Henan 471023, China) Abstract: In the process of the mechanical principle course designing mechanical product development, it usually takes the kinematic simu lation to simulate the movement progress and analyse its parameters for the options and identifications of the programmes.Base on establish ment of Four Bar Mechanism ,this paper realize the movement analysis of the linkage mechanism through the SimMechanics model in Matlab and change traditional graphical methods, offer a experience to improve mechanical principle course designing. Key words: mechanical principle, linkage mechanism; motion simulation; simmechnics
matlab在机械领域的应用
Matlab在机械领域的应用Matlab作为第四代计算机语言,可以把工程师从繁琐的程序代码中解放出来,能够快速的验证自己的模型和算法。
MATIAB是美国 MathWorks公司推出的一套功能强大的工程计算软件它将计算与可视化集成到一个灵活的计算环境中,并提供大量的内置函数,在解决广泛的工程问题时,可以直接利用这些函数获得数值解,故被广泛地应用于自动控制、数理统计、数值分析、流体力学和机械设计等许多工程领域。
鉴于目前国内关于探讨 MATLAB软件在工程机械优化问题和机械优化设计教学领域中应用的例子并不多见,加之出于教学和研究的需要,近年来对运用 MATLAB软件,如何解决实际工程优化问题和优化设计教学中的问题进行了初步的探索和研究。
Matlab是一个功能十分强大的工程计算及数值分析软件,利用matlab的优化工具箱可以求解线性规划、非线性规划和多目标规划的问题,为机械优化设计提供了更方便、快捷的途径。
应用 matlab优化工具箱进行机械设计优化问题的求解简单、易学,不用编写大量的优化算法程序,提高了设计效率,更重要的是,培养了学生的研究和设计能力,为他们今后的学习和工作打下了良好的基础。
1)应用 MATIAB优化工具箱内置的函数模块 fmincon,不仅可以很好地解决单目标多变量约束非线性优化问题。
2)利用 MAT1AB软件强大的图形模拟功能,可以直观显示各约束函数的图形,即可准确画出可行域,据此不仅便于直观地排除非有效约束、简化优化问题,而且更重要的是有助于从事优化设计教学和研究者对于问题的理解和判断。
(3)由于 MATLAB软件具有强大的图形,数值计算功能及较高的编程效率,故它是一种能够用来解决机械优化设计教学和工程优化问题研究的十分强大而有效的工具。
具有以往采用其它编程方法或手段解决优化问题所不能比拟的优点。
MATLAB软件在机械优化设计中的应用研究

MATLAB软件在机械优化设计中的应用研究MATLAB软件在机械优化设计中的应用研究随着科技的发展和人们对产品质量和性能要求的不断提高,机械优化设计成为了一个重要的领域。
机械优化设计的目的是通过优化设计参数,使得产品在满足各项要求的前提下,实现最佳性能与效益的平衡。
MATLAB软件作为一种非常强大的数学软件工具,广泛应用于科学计算、数据分析和工程设计中。
它提供了丰富的数学函数、工具箱以及编程环境,可以有效地进行机械优化设计的研究。
在机械优化设计中,常常需要通过分析和建立数学模型来描述设计问题,并使用优化算法来搜索最优解。
MATLAB软件提供了丰富的函数库和工具箱,可以方便地进行数学建模和优化算法的实现。
首先,MATLAB软件具有强大的数学函数库,能够实现各类数学运算和分析。
例如,对于机械结构的强度分析,可以使用MATLAB中的线性代数和优化函数库进行计算。
通过矩阵运算和优化算法,可以方便地求解最大应力、最小变形等设计目标。
此外,MATLAB还提供了信号处理、图像处理和优化工具箱,可以应用于机械优化设计中的各个环节。
其次,MATLAB软件具备编程环境,能够自定义算法进行机械优化设计。
在进行机械优化设计时,往往需要通过迭代搜索来求解最优解。
MATLAB的编程环境可以方便地实现自定义的优化算法。
用户可以根据设计需求,编写相应的代码进行优化设计。
MATLAB还支持并行计算和集群计算,可以大幅提高计算效率,加速机械优化设计的过程。
此外,MATLAB软件还具有友好的图形界面,可以直观地展示和分析优化设计结果。
通过绘制曲线、图表和动画等可视化方式,设计者可以直观地了解到优化设计的效果和性能变化。
这对于进行设计方案的比较和选择、参数调整以及优化策略的优化具有重要意义。
在实际的机械优化设计中,MATLAB软件已经被广泛应用。
例如,在机械结构的轻量化设计中,可以通过MATLAB进行拓扑优化和材料优化,实现结构的最优设计。
matlab在机械原理中的应用实例
matlab在机械原理中的应用实例在机械原理中,MATLAB是一种常用的计算工具,可以应用于诸多领域,包括机械设计、力学分析、动力学仿真等。
下面将介绍几个MATLAB在机械原理中的应用实例。
1.机构设计与分析MATLAB可以用于机构的设计和分析,例如平面机构、空间机构、曲柄机构等。
它提供了多种机构建模方法,如刚体模型、柔性模型等。
利用MATLAB的强大计算能力和绘图功能,可以进行机构分析和优化。
例如,可以计算机构的运动学性能、动力学性能和静力学性能,并进行动态仿真。
2.动力学仿真MATLAB可以进行各种机械系统的动力学仿真,包括振动系统、运动系统和控制系统。
通过对机械系统建立微分方程或差分方程,利用MATLAB进行数值解求解,并绘制相应的图形,可以得到机械系统的响应。
例如,可以模拟机械系统的自由振动、强迫振动和阻尼振动等。
3.控制系统设计与分析MATLAB在机械原理中的应用还包括控制系统的设计与分析。
通过MATLAB中的控制系统工具箱,可以进行控制系统的模型建立、系统分析和控制器设计。
例如,可以利用MATLAB对机械系统进行稳定性分析、频域分析和时域分析,并设计相应的控制器,实现机械系统的控制。
4.声学分析MATLAB也可以用于机械系统的声学分析。
通过建立机械系统的声学模型,利用MATLAB进行声场分布和声压级分析。
可以计算机械系统的声辐射特性,例如机械振动引起的噪声。
同时,还可以进行声学优化设计,减少机械系统的噪声。
5.优化设计MATLAB在机械原理中广泛应用于优化设计。
通过建立数学模型和定义目标函数,利用MATLAB进行优化计算。
例如,可以利用MATLAB进行机械系统的拓扑优化、形状优化和尺寸优化,实现机械系统的性能优化。
同时,还可以利用MATLAB的优化算法进行参数优化和控制器设计。
综上所述,MATLAB在机械原理中具有广泛的应用,可以应用于机构设计与分析、动力学仿真、控制系统设计与分析、声学分析和优化设计等方面。
大二机械原理课程设计插床matlab

大二机械原理课程设计插床matlab大二机械原理课程设计:插床MATLAB引言:插床是机床的一种,用于加工金属零件时,通过插刀进行切削。
插床具有切削速度快、工件精度高等优点,被广泛应用于机械制造行业。
本文将介绍一种利用MATLAB进行插床仿真的方法,通过编写MATLAB程序,实现对插床的运动轨迹和切削过程的模拟。
一、插床运动轨迹的建模在插床的运动过程中,刀具需要按照一定的轨迹进行插入和退出。
为了模拟插床的运动轨迹,需要对刀具的运动进行建模。
可以使用MATLAB中的插值函数来实现对插床运动轨迹的模拟。
需要确定插床的初始位置和目标位置。
然后,根据初始位置和目标位置之间的距离,计算出刀具插入或退出的总距离。
接下来,选择合适的插值方法,如线性插值或样条插值,根据总距离和插入或退出时间来计算出刀具在不同位置的坐标。
在MATLAB中,可以使用interp1函数来进行插值计算,根据初始位置、目标位置、总距离和插入或退出时间,得到刀具在不同位置的坐标。
通过绘制这些坐标点,可以得到插床的运动轨迹。
二、插床切削过程的模拟插床的切削过程是通过刀具对工件进行切削来实现的。
为了模拟插床的切削过程,需要对切削力进行建模,并将其应用到插床的运动轨迹上。
根据机械原理课程的知识,切削力与切削速度、切削深度、切削角度等因素有关。
可以通过建立切削力的数学模型,将切削力作用于插床的运动轨迹上,从而实现对插床切削过程的模拟。
在MATLAB中,可以使用函数来定义切削力的数学模型,并将其与插床的运动轨迹相结合。
通过调用这些函数,可以得到插床在不同位置上的切削力。
然后,可以根据切削力的大小和方向,对插床的运动轨迹进行调整,模拟切削过程。
三、插床MATLAB程序的编写根据上述的建模和模拟方法,可以编写一个MATLAB程序来实现对插床的仿真。
首先,需要定义插床的初始位置和目标位置,以及刀具插入或退出的总距离和时间。
然后,通过调用插值函数,得到插床的运动轨迹。
matlab软件在机械优化设计中的应用
matlab软件在机械优化设计中的应用摘要:能够有效地处理复杂的科技问题,机械优化设计常常受到科学家和工程师的欢迎,而MATLAB软件则是一款功能强大且易于使用的计算机软件,能够满足复杂的机械优化设计需求。
本文介绍了MATLAB软件在机械优化设计中的应用,总结了其各种应用:数值计算、模拟计算、可视化计算等,并对其在机械优化设计中的应用效果、开发成本进行了详细分析,总结出MATLAB在机械优化设计中的优势。
关键词:MATLAB;机械优化设计;数值计算;模拟计算1 、MATLAB软件在机械优化设计中的应用机械优化设计是机械工程中的一项重要技术,能够有效地处理复杂的科技问题,受到科学家和工程师的欢迎。
而MATLAB软件则是一款功能强大且易于使用的计算机软件,能够满足复杂的机械优化设计需求。
本文介绍了MATLAB软件在机械优化设计中的应用,总结了其各种应用:数值计算、模拟计算、可视化计算等,并对其在机械优化设计中的应用效果、开发成本进行了详细分析,总结出MATLAB在机械优化设计中的优势。
2、MATLAB软件在机械优化设计中的应用(1)数值计算。
MATLAB软件具有强大的数值计算能力,可以实现复杂的数值计算,可以实现数据的采集、可视化和模拟,可以快速计算模型函数、变量变换函数、插值函数、积分函数和微分方程等,并可以方便地使用MATLAB自带的优化函数,实现机械优化设计仿真模型的数值分析和优化。
(2)模拟计算。
MATLAB软件具有多种模拟计算方式,可以使用MATLAB开发框架,很容易地实现优化设计仿真模型的快速构建和演示。
另外,MATLAB也提供了MATLAB绘图工具,用户可以根据不同的需求,使用该工具快速构建出任意复杂的仿真模型,进行机械优化设计的模拟计算。
(3)可视化计算。
MATLAB软件提供了一套图形化用户界面,可以使用MATLAB开发框架,快速实现模型的可视化计算,构建出复杂的系统行为模型,可将优化设计仿真模型的实时变化进行可视化展示。
Matlab软件在机械原理课程OBE教学改革中的应用
Internal Combustion Engine &Parts0引言机械原理课程主要包括三大分析(即结构分析、运动分析和力分析)、三大机构(即连杆机构、凸轮机构和齿轮机构)和三大机械(即机械的效率、机械的平衡和机械的运动),简称“机原三三制”。
其分析设计主要采用解析法和作图法,数学运用多,而我校培养的应用型本科生的数学理论基础不够好,在学习该课程时较吃力,甚至畏惧。
如何提高学生课堂知识获得感一直是机械原理课程OBE 教学改革中待解决的重要问题。
Matlab 是一种在数学、自动控制等领域得到广泛应用的数学软件。
为提高学生知识获得感,培养学生软件应用能力等,我们将Matlab 引入到机械原理课程的OBE 教学改革中。
1相关研究现状一些教师已对Matlab 在机械原理课程教学中的应用进行了研究。
例如:刘相权将Matlab 应用于六杆牛头刨床的运动分析[1]。
王宪磊研究了Matlab 在自动控制原理建模分析中的应用[2]。
王俊峰和田丽萍在机原课程设计教学中应用了SimMechanics 模块[3]。
杨绿云将Simulink 模块与———————————————————————基金项目:贵州工程应用技术学院2018年本科教学质量提升工程项目(2018JG097,2018JG100);贵州工程应用技术学院高层次人才科研项目(院科合字G2018009);国家自然科学基金资助项目(51375168)。
作者简介:李永湘(1981-),男,博士,研究方向为OBE 教学改革、云制造;何晓芬(1990-),女,硕士,研究方向为现代设计方法;张卫华(1984-),男,硕士,研究方向为先进制造装备。
Matlab 软件在机械原理课程OBE 教学改革中的应用Application of Matlab in OBE Teaching Reform of Mechanical Principle Course李永湘LI Yong-xiang ;何晓芬HE Xiao-fen ;张卫华ZHANG Wei-hua(贵州工程应用技术学院机械工程学院,毕节551700)(College of Mechanical Engineering ,Guizhou University of Engineering Science ,Bijie 551700,China )摘要:将Matlab 应用于机械原理课程OBE 教学改革,针对机械原理三三制将课程分为三大模块:三大分析、三大机构和三大机械,规划了Matlab 在机械原理教学中应用专题,提出了实施措施,案例研究结果表明,机制专业学生学习成绩和多项能力得到提高。
matlab在机械控制工程教学中的运用
matlab在机械控制工程教学中的运用Matlab在机械控制工程教学中的运用近年来,随着科技的不断发展,计算机辅助教学已经成为教育领域的一项重要工具。
在机械控制工程教学中,Matlab作为一种功能强大的计算工具,被广泛应用于教学实践中。
本文将探讨Matlab在机械控制工程教学中的运用,并分析其优势和局限性。
Matlab在机械控制工程教学中的运用可以帮助学生更好地理解和应用控制理论。
通过Matlab编程,学生可以模拟和分析各种控制系统的动态特性,比如传递函数、阶跃响应、频率响应等。
这样,学生可以通过实验和仿真的方式,直观地观察和理解控制系统的行为。
此外,Matlab还提供了丰富的工具箱,包括PID控制器设计、根轨迹分析、频域分析等,这些工具可以帮助学生更深入地学习和掌握控制理论。
Matlab在机械控制工程教学中的运用可以培养学生的计算和编程能力。
机械控制工程需要进行大量的计算和仿真工作,Matlab作为一种高效的数值计算工具,可以帮助学生快速进行各种计算和仿真实验。
通过编程实践,学生可以提高他们的计算和编程能力,并且在实际工程项目中能够更好地应用所学知识。
Matlab还具有用户友好的界面和丰富的函数库,使得学生能够快速上手并进行各种实验。
同时,Matlab还支持脚本编程和函数编程两种模式,学生可以根据自己的需求选择适合的编程方式。
这种交互式的编程环境,可以帮助学生更好地理解和掌握编程语言的基本概念和技巧。
然而,Matlab在机械控制工程教学中也存在一些局限性。
首先,Matlab作为一种商业软件,需要学校或学生购买授权才能使用。
这给一些经济条件较差的学生带来了一定的困扰。
其次,Matlab在处理大规模数据和复杂系统时的性能并不是很好。
对于一些需要进行大规模数据处理和高性能计算的实验,Matlab可能无法满足要求。
此外,Matlab在图形界面的设计上也相对较弱,对于一些需要进行复杂可视化和交互操作的实验,Matlab可能无法提供理想的解决方案。
机械原理matlab

机械原理matlab
机械原理是研究机械结构运动规律和力学特性以及机械设备的设计、制造、检测和控制等方面的学科。
Matlab是一种功能强大的计算工具,对机械原理的理解和研究也有很大的帮助,以下是一些在机械原理中可以使用Matlab的应用:
1. 动力学模拟:Matlab可以用来建立机械结构的动力学模型,通过求解非线性方程组、微分方程等数学模型,模拟机械结构的运动和力学特性以及其对于外界的响应和输出。
2. 模态分析:Matlab还可以进行机械结构的动态模态分析,计算结构的固有频率、振型和振动特性,以及响应特性等。
这对于机械结构的设计、优化和降噪等方面非常有帮助。
3. 强度计算:Matlab可以计算机械结构的应力、应变等力学参数,分析结构的强度、刚度和稳定性等性能,对于结构设计、提高机械性能和耐久性等方面有很大帮助。
4. 优化设计:Matlab可以结合优化算法进行机械结构的优化设计,如遗传算法、模拟退火算法等,以达到最优性能。
同时,还可以进行优化建模、参数优化和多目标优化等方面的应用。
总之,机械原理中Matlab的应用十分广泛,对于机械结构的建模、分析和优化
等方面都有很大的帮助,可以提高机械设备的性能和效率,降低成本和风险。
MATLAB在力学、机械中的应用举例

阵除法X=A\B直接来解。在本题中,X和B都是6×1列向量,而A
是6×6阶方阵。
在编写程序时,尽量用文字变量,先输入已知条件,在程序
开始处给它们赋值,这样得出的程序具有一定的普遍性,若要修
改参数,只需修改头几行的数据即可。
MATLAB在力学、机械中的应用举例
◆ MATLAB程序
G1=200; G2=100; L1= 2; L2=sqrt (2); %给原始参数赋值
MATLAB在力学、机械中的应用举例
MATLAB在力学、机械中的应用举例
7.1 理论力学 7.2 材料力学 7.3 机械振动
MATLAB在力学、机械中的应用举例
7.1 理论力学
【例 7-1-1】 给定由N个力 Fi (i=1,2,…,N)组成的平面
任意力系,求其合力。
解:
◆ 建模
本程序可用来对平面任意力系作简化,得出一个合力。求合
值积分的步长是MATLAB按精度自动选取的,其间隔可变,因此dt
要用数组表示。
主程序exn713:
vt=input(′vt=′); vm=input(′vm=′);
%输入主程序及函数程序共用的参数
z0=input(′[x0;y0]=′); %输入数值积分函数需要的参数
tspan=input(′tspan=[t0,tfinal]=′);
%输入数值积分函数需要的参数
[t,z]=ode23(′exn713f′,tspan,z0);
%进行数值积分
plot(z(∶,1),z(∶,2));
%绘图
MATLAB在力学、机械中的应用举例
%在惯性坐标中,M点位置的导数是相对速度,而其二次导数 则为绝对加速度
dt=diff(t); Ldt=length(dt); %为了求导数,先求各时刻处t的增量
MATLAB在机械设计方面的应用
MATLAB在机械设计方面的应用MATLAB是一种强大的数学计算软件,广泛应用于科学和工程领域。
在机械设计方面,MATLAB可以提供多种功能和工具,用于解决机械设计中的各种问题。
本文将介绍MATLAB在机械设计中的应用,并简单介绍一些相应的功能和工具。
一、运动学和动力学分析MATLAB提供了丰富的工具箱,用于机械系统的运动学和动力学分析。
用户可以使用这些工具箱来模拟和分析机械系统的运动和力学特性。
例如,用户可以使用SimMechanics工具箱来建立机械系统的多体动力学模型,并进行系统的运动学和动力学分析。
用户可以利用这些工具进行机械系统的运动模拟、力学特性分析和设计优化。
二、结构分析MATLAB还提供了一些工具和函数,用于机械结构的分析和设计。
例如,用户可以使用Structural Analysis工具箱来进行机械结构的静力学和动力学分析。
用户可以建立机械结构的有限元模型,并通过对结构施加加载,计算结构的应力、应变和变形等。
用户还可以使用这些工具进行结构的优化设计和材料选择。
三、控制系统设计MATLAB在控制系统设计方面也有很多应用。
机械系统通常需要控制系统来保持其性能和稳定性。
用户可以使用Control System工具箱来进行机械系统的控制系统设计。
用户可以进行系统的建模和仿真,设计和调整控制器的参数,进行系统的响应和稳定性分析等。
用户还可以使用这些工具进行机械系统的自动控制和优化设计。
四、信号处理和图像处理信号处理和图像处理在机械设计中也是非常重要的。
MATLAB提供了丰富的信号处理和图像处理工具箱,用于机械系统中信号和图像的获取、处理和分析。
用户可以利用这些工具进行机械系统中传感器信号的滤波、噪声去除、频谱分析等。
用户还可以使用这些工具进行机械系统中图像的处理、特征提取、目标检测等。
五、优化设计MATLAB还提供了一些优化算法和函数,用于机械系统的优化设计。
用户可以使用这些算法和函数对机械系统的设计参数进行优化,以达到设计目标和约束条件。
Matlab软件在机械原理教学中的应用
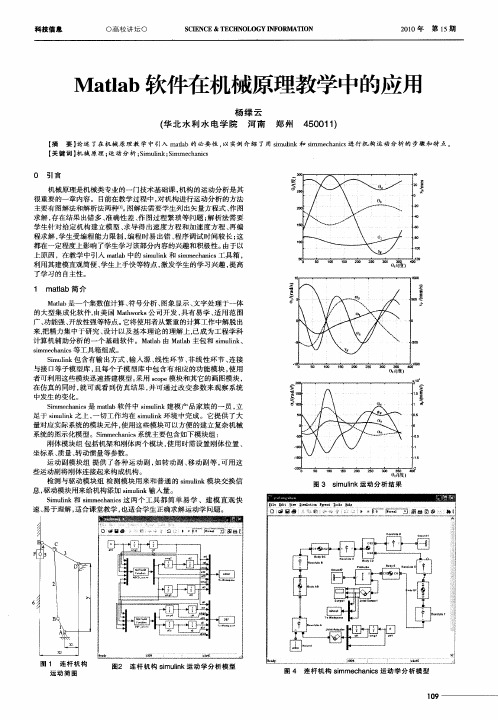
1 malb简 介 t a
Maa t b是一个集数值计算 、 l 符号分析 、 图象显示 、 文字处理于一体 的大型集成化 软件, 由美 国 Ma w rs 司开发 , t ok 公 h 具有 易学 、 适用 范 围 广、 功能强、 开放性强等特点 。 它将使用者从繁重 的计算工作 中解脱 出 来, 把精力集中于研究 、 计以及基本 理论的理解上 , 设 已成 为工 程学科 计 算机辅助分析 的一个 基础软件 。Maa t b由 Mal l t b主包 和 s l k a i i 、 mu n s mehnc 等工 具 箱 组 成 。 i c ais m Sm l k包 含有输 出方式 、 入源 、 性环节 、 i ui n 输 线 非线性 环节 、 连接 与接 口等子模型库 , 且每个 子模型库 中包含有相应 的功能模块 , 使用 者可利用这些模块迅速搭建模型 。 采用 so e cp 模块和其它的画图模块 , 在仿 真的同时 , 就可观看 到仿真结果 , 并可通过改 变参 数来观察 系统 中发生 的变化 。 Smmeh nc 是 ma a i ca i s t b软件 中 s uik建模产 品家族的一员 , l i l m n 立 足 于 s l k之上 , 切工 作均在 s l k环境 中完成 。它提供 了大 i i mu n 一 i i mu n 量对应实际系统的模块元件 , 使用这些模 块可以方便 的建立复 杂机械 系统 的图示化模型 。Sm cais imehnc 系统主要包含如下模块组 : 刚体模块组 包括机架 和刚体两个模块 , 使用 时需设 置刚体位置 、 坐标系 、 质量 、 转动惯量等参数 。 运动副模块 组 提供 了各 种运动 副 , 如转 动副 、 动副等 , 移 可用这 些运动副将刚体 连接起来 构成机 构。 检测与驱动模块组 检测模块用来 和普通 的 s u n 模块交换信 i lk m i 息, 驱动模块用来 给机 构添加 sm l k i ui 输入量 。 n Smuik和 s i l n i ca i mmeh ne s这两 个工具 都简 单易 学 、建 模直 观快 速、 易于理解 , 适合课堂教学 , 也适合学生正确求解运动学 问题 。
《机械原理MATLAB辅助分析》
《机械原理MATLAB辅助分析》机械原理是机械工程专业的重要课程之一,涉及到力学、材料力学、动力学等方面的内容。
MATLAB作为一种功能强大的数学软件,可以帮助学生更好地理解和分析机械原理的相关问题。
本文将介绍如何使用MATLAB进行机械原理的辅助分析。
首先,MATLAB可以帮助学生进行机械结构的力学分析。
对于一个给定的机械结构,可以通过数学计算和编程来确定其内部的应力、位移等力学参数。
例如,可以利用MATLAB求解一个给定的静力学问题,如弹簧的伸长量、杆件的应力分布等。
通过这种方式,学生可以直观地了解机械结构的力学性能,并更好地理解力学原理。
其次,MATLAB还可以帮助学生进行机械系统的动力学分析。
机械系统的动力学分析主要涉及到运动学和动力学两方面的内容。
运动学分析主要是研究机械系统的位置、速度、加速度等参数的变化规律,而动力学分析则研究机械系统在外力作用下的运动规律。
借助MATLAB的数学计算和编程功能,可以方便地对机械系统的运动学和动力学进行模拟和分析。
例如,可以通过编写MATLAB程序,模拟一个机械系统的运动轨迹,计算其速度和加速度等参数,并根据这些参数来评估机械系统的运动性能。
此外,MATLAB还可以帮助学生进行机械系统的优化设计。
在机械原理中,优化设计是一个重要的研究方向,主要涉及到对机械系统的性能进行改进和优化。
通过利用MATLAB的优化算法和模拟功能,可以对机械系统的结构参数进行优化,并自动最优解。
例如,可以通过编写MATLAB程序,对机械系统的结构参数进行优化,以使其满足一定的性能指标,如最小质量、最大刚度等。
总之,MATLAB作为一种功能强大的数学软件,可以帮助学生更好地理解和分析机械原理的相关问题。
通过利用MATLAB进行力学分析、动力学分析以及优化设计,可以使学生对机械原理的知识和理论得以更加直观和深入的理解,从而提高他们的学习效果和专业素养。
matlab在机械控制工程教学中的运用
Matlab在机械控制工程教学中的运用介绍在机械控制工程教学中,Matlab是一种强大的工具,可以帮助学生深入理解控制理论,并实践应用于实际问题中。
本文将探讨Matlab在机械控制工程教学中的运用,并讨论其优势和应用案例。
Matlab的优势Matlab作为一种高级编程语言和数值计算环境,具有以下优势:1.易于学习和使用:Matlab的语法与数学符号和表达式类似,易于学习和理解,使学生能够快速上手。
2.丰富的工具箱:Matlab提供了许多工具箱,如控制系统工具箱、信号处理工具箱等,可以方便地进行控制系统分析和设计。
3.强大的可视化能力:Matlab具有丰富的绘图函数和工具,可以直观地展示控制系统的动态响应和频率特性,有助于学生理解控制系统的行为。
4.灵活的编程环境:Matlab支持脚本编程和函数编程,可以根据需要进行灵活的编程和算法实现。
5.与硬件的无缝集成:Matlab可以与硬件设备进行无缝集成,如传感器、执行器等,使学生能够进行实时控制实验。
Matlab在机械控制工程教学中的应用案例1. 控制系统建模与分析控制系统建模是机械控制工程教学的重要内容。
Matlab提供了控制系统工具箱,可以方便地进行控制系统建模和分析。
1.1. 系统传递函数的建立通过Matlab,学生可以使用符号计算工具箱来推导系统的传递函数,并将其转化为数值形式进行分析。
1.2. 系统的稳定性分析Matlab提供了稳定性分析的函数和工具,如根轨迹、Bode图等,学生可以直观地观察系统的稳定性特性。
1.3. 系统的性能指标分析通过Matlab,学生可以计算系统的性能指标,如超调量、调节时间等,帮助他们评估和改进控制系统的性能。
2. 控制器设计与优化控制器设计是机械控制工程教学的核心内容之一。
Matlab提供了多种控制器设计方法和工具,可以帮助学生进行控制器设计和优化。
2.1. PID控制器设计Matlab提供了PID控制器设计工具箱,学生可以通过调整PID参数来优化系统的响应特性。
机械工程实验——matlab实验报告

机械工程实验——matlab实验报告1. 引言机械工程是一个涵盖广泛的领域,其实验课程可以帮助学生理解和应用机械原理、设计和制造等方面的知识。
本实验报告将介绍一个基于Matlab软件的机械工程实验,在实验中我们将使用Matlab进行数据分析和建模。
通过这个实验,我们可以深入理解机械工程中的一些重要概念,并学习如何使用Matlab软件进行相关分析。
2. 实验目标本实验旨在通过使用Matlab软件来深入了解机械工程中的一些基本概念,包括数据分析、建模和仿真。
具体目标如下:•学习如何使用Matlab进行数据分析,包括数据的导入、处理和可视化。
•掌握Matlab中常用的数据建模和仿真方法。
•理解机械工程中的一些基本原理,并应用到实验中。
•分析实验结果并提出相应的结论。
3. 实验方法本实验主要分为四个步骤,分别是数据导入与处理、数据可视化、数据建模与仿真以及结果分析。
具体的实验方法如下:3.1 数据导入与处理首先,我们需要收集实验数据,并将数据导入到Matlab软件中。
可以使用Matlab的csvread函数将CSV格式的数据文件导入到Matlab。
然后,我们需要对数据进行预处理,例如去除异常数据和补充缺失数据等。
3.2 数据可视化在数据导入和处理完毕后,我们可以使用Matlab的数据可视化工具对数据进行可视化分析。
例如,可以使用Matlab的plot函数绘制数据的折线图,或者使用scatter函数绘制数据的散点图。
通过可视化分析,我们可以更清晰地了解数据的分布规律。
3.3 数据建模与仿真在数据可视化之后,我们可以使用Matlab的数据建模工具对数据进行建模和仿真。
例如,可以使用Matlab的回归分析工具对数据进行回归分析,并得到拟合的曲线。
此外,还可以使用Matlab的仿真工具对数据进行仿真实验,以验证建立的模型的准确性和有效性。
3.4 结果分析最后,我们需要对实验结果进行分析,并提出相应的结论。
可以比较实验结果与理论预期结果的差异,并对差异进行分析。
机械专业matlab的课程设计

机械专业matlab的课程设计一、教学目标本课程的教学目标是使学生掌握Matlab在机械专业中的应用技能,能够利用Matlab进行简单的机械系统分析和设计。
具体目标如下:1.理解Matlab的基本概念和操作。
2.掌握Matlab在机械系统分析中的应用方法。
3.能够熟练使用Matlab进行数据分析。
4.能够利用Matlab进行简单的机械系统设计和优化。
情感态度价值观目标:1.培养学生的创新意识和解决问题的能力。
2.培养学生对机械工程领域的兴趣和热情。
二、教学内容根据课程目标,教学内容主要包括Matlab的基本概念和操作、Matlab在机械系统分析中的应用方法以及机械系统设计和优化实例。
具体安排如下:1.Matlab的基本概念和操作:介绍Matlab的工作环境、基本语法、数据类型和运算符等。
2.Matlab在机械系统分析中的应用方法:讲解Matlab在力学、动力学、控制等方面的应用,包括线性方程组求解、微分方程求解、曲线拟合等。
3.机械系统设计和优化实例:通过具体实例,讲解如何利用Matlab进行机械系统设计和优化,包括结构分析、强度计算、运动学分析等。
三、教学方法为了激发学生的学习兴趣和主动性,本课程将采用多种教学方法,包括讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过讲解Matlab的基本概念和操作,使学生掌握Matlab的基本使用方法。
2.讨论法:通过分组讨论和课堂讨论,引导学生主动思考和解决问题。
3.案例分析法:通过分析实际案例,使学生了解Matlab在机械专业中的应用方法和技巧。
4.实验法:通过上机实验,让学生亲手操作Matlab,巩固所学知识和技能。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将选择和准备以下教学资源:1.教材:《Matlab基础教程》或《Matlab在机械工程中的应用》。
2.参考书:提供相关的参考书籍,供学生自主学习。
3.多媒体资料:制作课件和教学视频,帮助学生更好地理解和掌握Matlab的使用方法。
大二机械原理课程设计插床matlab
大二机械原理课程设计插床matlab插床是一种常见的金属切削加工设备,广泛应用于制造业中。
在大二机械原理课程设计中,插床的设计与分析是非常重要的。
本文将介绍如何利用MATLAB软件对插床进行设计和分析。
首先,插床的设计需要考虑到多个因素,包括结构、动力学、控制系统等。
在MATLAB中,我们可以利用机械系统仿真工具箱对插床进行建模和仿真。
首先,我们需要确定插床的结构参数,包括床身长度、立柱高度、横梁宽度等。
然后,我们可以利用MATLAB的图形绘制函数,如plot函数,绘制出插床的结构图。
接下来,我们可以利用MATLAB对插床的动力学进行分析。
通过建立插床的运动学方程和动力学方程,我们可以求解插床的速度、加速度等动力学参数。
在MATLAB中,我们可以利用符号计算工具箱或数值计算工具箱对这些方程进行求解。
此外,我们还可以利用MATLAB的绘图函数将插床的速度曲线、加速度曲线等进行可视化展示。
插床的控制系统也是设计中重要的一个部分。
在MATLAB中,我们可以利用控制系统工具箱对插床的控制系统进行建模和分析。
首先,我们需要确定控制系统的输入和输出,如电机输入和位移输出。
然后,我们可以利用传递函数模型对控制系统进行建模,并通过频域分析、时域分析等方法对控制系统的性能进行评估。
此外,MATLAB还提供了许多辅助函数和工具箱,以帮助我们进行插床的设计和分析。
例如,MATLAB中的优化工具箱可以帮助我们进行插床的参数优化,使其达到最佳性能。
另外,MATLAB中的仿真工具箱可以帮助我们进行插床的运动仿真和动力学分析。
总之,通过利用MATLAB软件对插床进行设计和分析,我们可以更好地理解和掌握插床的工作原理和性能特点。
同时,MATLAB提供了丰富的工具和函数,使我们能够更高效地进行插床的设计和分析。
希望本文能对大二机械原理课程设计的插床部分有所帮助。
机械原理课程设计用MATLAB做

机械原理课程设计用MATLAB做一、教学目标本课程旨在通过MATLAB软件的应用,让学生掌握机械原理的基本知识和技能,培养学生的创新意识和实践能力。
知识目标:使学生了解机械原理的基本概念、原理和应用,掌握MATLAB在机械原理分析中的基本使用方法。
技能目标:通过案例分析和实践操作,培养学生运用机械原理知识和MATLAB 软件解决实际问题的能力。
情感态度价值观目标:激发学生对机械原理和MATLAB软件应用的兴趣,培养学生的团队协作精神和自主学习能力。
二、教学内容本课程的教学内容主要包括机械原理的基本概念、机构和机器的设计与分析方法,以及MATLAB在机械原理分析中的应用。
教学大纲安排如下:1.机械原理概述:介绍机械原理的基本概念、研究对象和内容。
2.机构分析:讲解各种机构的工作原理和特性,包括齿轮机构、连杆机构等。
3.机器的设计与分析:介绍机器的设计方法和步骤,以及在不同工作条件下机器的性能分析。
4.MATLAB在机械原理分析中的应用:讲解MATLAB软件的基本使用方法,以及如何利用MATLAB进行机械原理分析和设计。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式,包括讲授法、案例分析法、实验法和讨论法。
1.讲授法:通过讲解机械原理的基本概念和理论知识,使学生掌握基本原理和方法。
2.案例分析法:通过分析实际案例,让学生了解机械原理在工程中的应用,培养学生的实践能力。
3.实验法:让学生动手操作,利用MATLAB软件进行机械原理分析和设计,提高学生的实际操作能力。
4.讨论法:学生进行分组讨论,培养学生的团队协作精神和批判性思维。
四、教学资源为了支持本课程的教学内容和教学方法,我们将准备以下教学资源:1.教材:《机械原理》,提供机械原理的基本知识和理论。
2.参考书:《MATLAB教程》,介绍MATLAB软件的基本使用方法。
3.多媒体资料:包括教学PPT、视频教程等,辅助学生理解和掌握知识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Matlab在机械原理课程设计中的应用研究作者:刘相权
来源:《教育教学论坛》2016年第52期
(北京信息科技大学机电工程学院,北京 100192)
摘要:本文以六杆机构牛头刨床为例,在运动学分析的基础上,应用Matlab软件编程实现了牛头刨床的位移、速度和加速度的变化曲线,完成了对牛头刨床的运动仿真,通过使用Matlab,为机械原理课程设计的改进提供了一个新的思路。
关键词:Matlab;机械原理;课程设计;六杆机构;运动仿真
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2016)52-0077-02
机械原理课程设计是机械原理课程重要的实践环节,培养学生机械系统运动方案设计的初步能力。
目前机械原理课程设计的方法有图解法和解析法两种,图解法需要学生列出矢量方程式,作图求解,其优点是几何概念清晰、形象,缺点是作图比较烦琐、精度不高[1]。
解析法需要学生针对给定机构建立运动学模型,求解出位移方程、速度方程和加速度方程、编程求解,根据求解结果绘制相应曲线。
解析法需要学生具有一定的编程能力,其优点是求解精度高,培养了学生运用现代化的手段解决设计问题的能力。
Matlab是美国Mathworks公司开发的大型科学计算软件,本文以机械原理课程设计中常见的牛头刨床为例,首先利用矩阵法对机构进行运动学分析,然后利用Matlab编程求解,绘制仿真曲线,直观再现牛头刨床从动件的运动规律。
一、牛头刨床工作原理概述
牛头刨床是一种用于平面切削加工的机床,图1所示为牛头刨床主运动机构的运动简图,由导杆机构1-2-3-4-5带动刨头5及其上的刨刀作往复切削运动。
刨头右行时,刨刀速度较低,刨刀进行切削,为工作行程。
刨头左行时,刨刀快速退回,刨刀不切削,有急回特性,为空回行程。
设计数据如表1所示。
在工作行程中,牛头刨床受到很大的切削阻力(在切削前后各有一段约0.05H的空刀距离,H为行程距离),而空回行程中则没有切削阻力[2]。
二、Matlab仿真分析及参数测量
当牛头刨床六杆机构中导杆CD处于左极限位置时,曲柄与x轴夹角为194.84度,刨头上E点坐标为(796.52,-495.5),为便于分析,以此位置作为曲柄顺时针旋转和刨头位移的起
始位置,在Matlab中编写程序,首先定义各杆长度及曲柄旋转角速度,然后根据先前推导的运动学方程编程实现[3],其源代码如下:
n1=72;w1=2*pi*n1/60;Lac=430;
Lcg=796.52;Lab=110;Lcd=810;Lde=291.6;
dy1=[];ddy1=[];Pos=[];
for theta1=(194.82/180*pi):-pi/100:
(194.82/180*pi-2*pi)
S3=sqrt((Lab*cos(theta1))^2+(Lac+Lab*sin(theta1))^2);
theta3=acos(Lab*cos(theta1)/S3);
theta4=pi-asin((Lcg-Lcd*sin(theta3))/Lde);
Se=Lcd*cos(theta3)+Lde*cos(theta4);
SS=[theta1,theta3,theta4,S3,Se]';
Pos=[Pos,SS];
A=[cos(theta3),-S3*sin(theta3),0,0;
sin(theta3),S3*cos(theta3),0,0;
0,-Lcd*sin(theta3),-Lde*sin(theta4),-1;
0,Lcd*cos(theta3),Lde*cos(theta4),0];
B=[-Lab*sin(theta1)*w1,Lab*cos(theta1)*w1,0,0]';
dy=A\B;
dy1=[dy1,dy];
dA=[-dy(2)*sin(theta3),
-dy(1)*sin(theta3)-S3*dy(2)*cos(theta3),0,0;
dy(2)*cos(theta3),
dy(1)*cos(theta3)-S3*dy(2)*sin(theta3),0,0;
0,-Lcd*dy(2)*cos(theta3),-Lde*dy(3)*cos(theta4),0; 0,-Lcd*dy(2)*sin(theta3),-Lde*dy(3)*sin(theta4),0]; dB=[-Lab*cos(theta1)*w1^2,-Lab*sin(theta1)*w1^2,0,0]'; ddy=A\(dB-dA*dy);
ddy1=[ddy1,ddy];
end
theta1=-1*(Pos(1,:)*180/pi-194.82);
theta3=Pos(2,:)*180/pi;
theta4=Pos(3,:)*180/pi;
S3=Pos(4,:);
Se=Pos(5,:)+495.5;
Ve=-1*dy1(4,:);
Acc=ddy1(4,:);
plot(theta1,Se),grid on
xlabel('曲柄转角(^o)');
ylabel('刨刀位移(mm)');
axis([0,360,0,450]);
title('位移曲线')
plot(theta1,Ve(1,:)),grid on
xlabel('曲柄转角(^o)');
ylabel('刨刀速度(mm/s)');
axis([0,360,-2250,1500]);
title('速度曲线')
plot(theta1,Acc(1,:)),grid on
xlabel('曲柄转角(^o)');
ylabel('刨刀加速度(mm/s^2)');
axis([0,360,-20000,20000]);
title('加速度曲线')
编好程序后,可调用绘图函数绘制相应的位移、速度和加速度曲线。
三、结束语
将Matlab引入机械原理课程设计的教学中,能够使学生掌握利用解析法计算公式设计机构的实际技能,提高学生利用计算机进行机械设计的能力,激发学生的学习兴趣,使其动手能力和创新能力均得到提高。
参考文献:
[1]孙恒,作模.机械原理[M].北京:高等教育出版社,2012.
[2]罗洪田.机械原理课程设计指导书[M].北京:高等教育出版社,1998.
[3]杨绿云.Matlab软件在机械原理教学中的应用[J].郑州工业大学学报,2010,5:P525-526。