西门子—Sinamics V90伺服驱动系统
v90伺服驱动器工作原理
v90伺服驱动器工作原理小伙伴们!今天咱们来唠唠这个超酷的V90伺服驱动器的工作原理,可有意思啦!咱先得知道啥是伺服驱动器哈。
你就把它想象成一个超级智能的小管家,专门管着伺服电机这个小跟班呢。
V90伺服驱动器啊,它的任务就是让伺服电机乖乖听话,按照咱们想要的方式转动。
这个V90伺服驱动器呢,它主要是接收各种信号。
比如说,从控制器那边来的信号,就像是指挥官下达的命令。
这个信号可能是告诉它,电机要转多快呀,要转多少角度呀之类的。
它就像个听话的小邮差,把这些命令好好地记在心里。
那它怎么让电机动起来呢?这里面可大有学问。
它会根据接收到的信号,生成一种特殊的电信号,这个电信号就像是魔法咒语一样。
这个电信号送到伺服电机那里,电机就像被施了魔法一样开始转动啦。
而且哦,这个V90伺服驱动器还特别聪明呢。
它可不是只把信号送出去就不管了。
它还会时刻盯着电机的状态。
就像一个操心的老母鸡看着小鸡似的。
它会检测电机是不是真的按照它要求的速度在转呀,是不是转到了正确的角度呀。
如果发现电机调皮不听话,比如说转得快了或者慢了,它就会马上调整自己发出去的电信号,就像赶紧拉一把或者推一把电机,让电机回到正轨上。
你知道吗?这个V90伺服驱动器里面还有好多小秘密。
它有自己的一套电路系统,这个电路系统就像是一个超级复杂的迷宫,但是每个部分都有自己的作用。
比如说,有一部分是专门用来放大信号的。
因为从控制器来的信号可能比较弱,就像小蚂蚁的力气一样小,它得把这个信号变得强大起来,这样才能有力气驱动电机这个大块头。
还有啊,它里面有专门的控制算法。
这个算法就像是一个超级聪明的大脑在思考。
这个算法会根据电机的各种参数,像电机的电阻呀,电感呀之类的,来计算出最合适的电信号。
就像裁缝根据客人的身材尺寸来裁剪衣服一样,这个算法根据电机的特性来定制最适合的驱动信号。
在整个工作过程中,V90伺服驱动器就像是一个全能的小超人。
它既要能处理各种复杂的信号,又要能精准地控制电机,还要时刻保持警惕,防止电机出问题。
最新V90伺服111报文插入及使用

西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
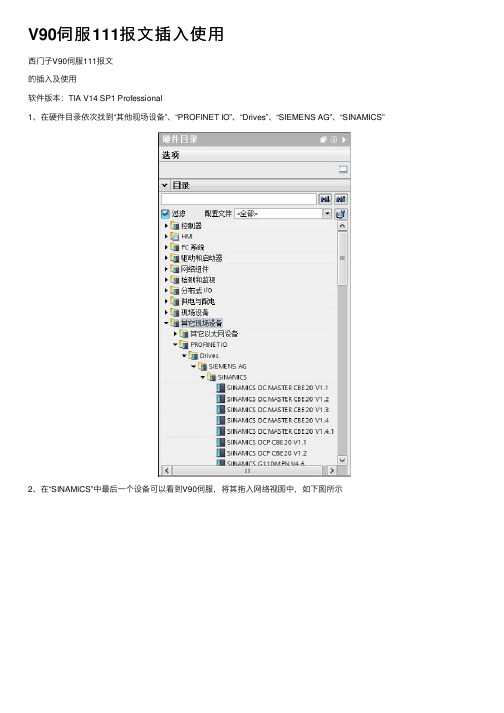
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW设为报文标识符280。
如何解决西门子V90高性能伺服

如何解决西门子V90高性能伺服
西门子V90伺服驱动系统作为SINAMICS驱动系列家族的新成员,与SIMOTICS S-1FL6 完美结合,组成最佳的伺服驱动系统,实现位置控制、速度控制和扭矩控制。
通过优化的设计,SINAMICS V90确保了卓越的伺服控制性能,经济实用、稳定可靠。
SIMOTICS家族新成员1FL6设计卓越,制作精良,为简单伺服应用提供可靠产品。
西门子V90单轴伺服驱动V90设计用于运动控制以满足一般的伺服应用,充分考虑了机床制造商和系统集成商所面临的成本和市场挑战。
V90支持即插即用式调试,伺服性能充分优化,与SIMATIC PLC快速集成,具有值得信赖的可靠性。
与全新的SIMOTICS S-1FL6伺服电机配套使用,形成最佳的伺服系统。
V90支持内部设定值位置控制、外部脉冲位置控制、速度控制和扭矩控制,整合了脉冲输入、模拟量输入/输出、数字量输入/输出以及编码器脉冲输出接口。
通过实时自动优化和自动谐振抑制功能,可以自动优化为一个兼顾高动态性能和平滑运行的系统。
此外,脉冲输入最高支持1MHz,充分保证了高精度定位。
SINAMICS V-ASSISTANT 调试工具
一款可以通过标准USB接口连接至V90的PC软件工具,可进行参数设置、系统优化、试运行、排障和监控(如跟踪与测量功能)等相关操作。
西门子V90特点低成本
1、集成所有控制模式:外部脉冲位置、内部设定值位置、速度和转矩控制;
2、全功率驱动标配内置制动电阻;
3、集成抱闸继电器。
伺服性能优异
1、自动优化功能使设备获得更高的动态性能
2、自动抑制机械谐振频率
3、1 MHz 的高速脉冲输入。
V90伺服111报文插入及使用学习资料

V90伺服111报文插
入及使用
西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW 设为报文标识符280。
SINAMICS V90 伺服驱动系统与 SIMOTICS S-1FL6 伺服电机说明书

伺服电机合作代理商021-********/180********2目录伺服驱动系统SINAMICS V90 伺服驱动和 SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW 到7.0kW 以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,传送,收卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合实现丰富的运动控制功能。
伺服驱动系统概述 ..................................................03伺服驱动系统优点 ..................................................05SINAMICS V90 伺服驱动系统 的自动化环境 ......................................................... 10SINAMICS V-ASSISTANT 调试工具 ..........................10SINAMICS V90 技术数据与控制特征 .......................12系统一览及接线图 ..................................................15SIMOTICS S-1FL6 技术数据 及扭矩/速度曲线 .................................................... 18SINAMICS V90 和 SIMOTICS S-1FL6 安装尺寸及安装间距 ............................................... 22选型步骤 ...............................................................26SINAMICS V90 和 SIMOTICS S-1FL6 订货数据 (27)3脉冲序列版本 (PTI)PROFINET 版本 (PN)SINAMICS V90 伺服驱动SINAMICS V90 根据不同的应用分为两个版本:1. 脉冲序列版本(集成了脉冲,模拟量,USS/MODBUS )2. PROFINET 通讯版本SINAMICS V90 脉冲版本可以实现内部定位块功能,同时具有脉冲位置控制,速度控制,力矩控制模式。
V90选型手册
脉冲串输入通道1: 5 V 差分高速脉冲输入
脉冲串输入通道2: 24 V 脉冲输入
转速限制 M
转矩限制 M
24 V +
PTIA_D+
1
PTIA_D-
2
PTIB_D+
26
PTIB_D-
27
P TI _ A _ 24P
36
P TI _ A _ 24M
37
PTI_B_24P
38
PTI_B_24M
39
12V 18
典型应用 • 装卸机:如码垛机 • 包装机:如贴标机、枕式包装机 • 自动组装机 • 刀具切换机 • 印刷机:如丝网印花机 • 缠绕机 • 金属成型机:如折弯机
5
低成本
高度集成的设计以降低系统成本
集成多种控制模式 V90 集成了外部脉冲位置控制、内部设定值位 置控制、速度控制和扭矩控制等模式。 不同的控制模式适用于多种应用场合。
2
SINAMICS 家族为各种场合提供最佳的驱 动应用
• SINAMICS 系列家族适用于各种驱动应用 • 超宽功率范围,覆盖从 0.12 kW 至 120 MW • 既适用于低压供电,也适用于中压供电 • 标准功能可适用于通用硬件和软件平台 • 具有高度的组合灵活性 SINAMICS V90 作为 SINAMICS 驱动系列家族的新成员,与 SIMOTICS S-1FL6 完 美 结 合, 组 成 最 佳 的 伺 服 驱 动 系 统, 实 现 位 置 控 制、 速 度 控 制 和 扭 矩 控 制。 通 过 优 化 的 设 计, SINAMICS V90 确保了卓越的伺服控制性能,经济实用、稳定 可靠。
接线灵活 方便快捷
V90 提供丰富全面的接口,每种控制模式都具有默认的接口定义,能满足各种应用需求,方便使用 ;而对于有特殊要求或个 性设置的应用,用户可以根据需要对接口进行重新定义。在保证标准应用方便性的同时,也为特殊应用提供了灵活性。 下图所示为脉冲串指令速度控制模式(PTI)下的默认接口定义,符合标准的应用习惯。
S7-1200CPU 1217C通过PROFINET 连接 V90伺服系统实现位置闭环控制
S7-1200CPU 1217C通过PROFINET 连接SINAMICS V90伺服系统实现位置闭环控制1摘要本文主要介绍了如何使用CPU 1217C通过PROFINET 连接SINAMICS V90伺服系统实现位置闭环控制。
其中对S7-1200 V4.0、V4.1固件版本的运动控制功能、工艺对象的组态和V90 PN的相关参数设置作了简要介绍。
2简介2.1S7-1200运动控制功能2.1.1S7-1200 V3.0 固件S7-1200 CPU固件版本从V3.0开始已经支持最多4路PTO输出,以CPU1214C (6ES7214-1AG31-0XB0)为例,其CPU本体支持4路PTO输出,其中PTO 1、PTO 2的频率范围为 2 Hz ≤ f ≤ 100 kHz,PTO 3 、PTO 4的频率范围为2 Hz ≤ f ≤ 20 kHz。
2.1.2S7-1200 V4.0 固件S7-1200 CPU V4.0固件版本虽然也只支持4路PTO输出,但是PTO的信号类型可以进行选择,支持的信号类型见表2-1 PTO 信号类型所示。
表2-1 PTO信号类型V4.0固件版本的CPU高速脉冲信号发生器输出地址可以自由分配给PTO,输出地址分配与输出频率范围见表2-2 脉冲信号发生器地址分配所示。
表2-2 脉冲信号发生器地址分配以CPU1214C CPU本体输出地址(6ES7214-1AG40-0XB0)为例,示例几种可能的PTO信号类型组合方式,见表2-3 脉冲方向组态所示:●示例1:4-100KHz PTO,不带方向输出。
●示例2:2-100KHz PTO 和 2-30KHz PTO,脉冲A+方向B输出。
●示例3:4-100KHz PTO,脉冲A+方向B输出,其中脉冲A100KHz,方向B 30KHz。
表2-3 脉冲方向组态2.1.3S7-1200 V4.1 固件S7-1200 CPU V4.1固件版本不仅支持通过PTO输出方式对伺服电机进行开环控制,而且支持通过PROFIdrive或者模拟量输出(AQ)方式对伺服电机进行闭环控制,见表2-4驱动器连接方式所示。
SINAMICS V90伺服转矩控制配置方法

SINAMICS V90伺服转矩控制配置方法关键词:SINAMICS V90伺服转矩控制摘要:在单独使用转矩控制时,如果电机输出转矩大于负载转矩,那么电机将进入加速状态,可能会出现飞车现象。
SINAMICS V90 系统在转矩控制时提供了速度监视功能,能够在发生飞车故障时封锁脉冲,并输出故障状态。
本文将对SINAMICS V90 的转矩控制配置方法进行介绍。
1、概述SINAMICS V90提供了四种基本控制模式:PTI 外部脉冲位置控制模式IPos 内部设定值位置控制模式S 速度控制模式T 转矩控制模式在SINAMICS V90 的转矩控制模式(T)下,电机将以设定的转矩进行输出。
一般情况下,转矩控制的电机需要配合速度控制的电机使用,以实现对生产线张力等的控制。
在单独使用转矩控制时,如果电机输出转矩大于负载转矩,那么电机将进入加速状态,可能会出现飞车现象。
SINAMICS V90 系统在转矩控制时提供了速度监视功能,能够在发生飞车故障时封锁脉冲,并输出故障状态。
本文将对SINAMICS V90 的转矩控制配置方法进行介绍。
2、SINAMICS V90 转矩控制功能描述2.1 激活转矩控制通过设置参数P29003 = 3 激活转矩控制。
注意:重新上电后,SINAMICS V90 才能使转矩控制模式生效!2.2 转矩设定值源转矩设定值有两个来源可以使用,这两个源可以通过命令TSET 来选择:TSET = 0 (默认设置)使用AI2 设定转矩TSET = 1 使用参数P29043 设定转矩2.2.1 使用AI2 设定转矩在转矩模式下,在TSET 为低电平时,AI2 作为转矩设定值。
AI2 的电压值对应的转矩参考值为P29041[0]。
比如:P29041[0] = 100% 10V 对应额定转矩*100%P20041[0] = 50% 10V 对应额定转矩*50%2.2.2 使用参数P29043 设定转矩在转矩模式下,在TSET 为高电平时,参数P29043 作为转矩设定值。
利用西门子S7-315控制西门子伺服V90详解
一.目录1.西门子伺服V90介绍2.利用315控制V90的方法-------------------------------------------------------P1.P33.机器人手动模式;-------------------------------------------------------P44.机器人启动自动化;-----------------------------------------------------P55.常见问题及解决方法;二.西门子伺服V90介绍1.V90驱动系统连接,下图介绍了V90接线配置示例:图12.V90伺服软件安装及使用方法介绍:(1).调试之前需要安装伺服控制软件V-ASSISTANT.(version 1.05.02).(2)按照要求设置控制模式:速度控制/位置控制。
(3)以位置控制(EPOS)介绍方法:点击set PROFINET-The current telegram:选择111报文。
(4)Configure network 中设置站名以及IP地址,设置完成后点击Save and active 按钮。
如下图:图2(5)可以通过软件Commission 中的测试点击画面,JOG方式操作电机正反转。
3.利用博途V14/V15控制V90步骤:(1)安装GSD文件v2.32后完成组态:注意博途软件需要安装Start drive 安装包后在全局库中找到西门子自带的功能块FB284-SINA_POS。
将SINA_POS功能块拖拽到需要创建的位置。
块中的各种引脚功能详见下图:图3图4注:根据引脚说明赋值即可,使用315CPU时Laddrsp/LaddrAV赋值跟组态地址一致。
(2)博途中的组态V90 图例如下:1、创建S7-300图5 2、查找对应版本的GSD图6 3、分配IP地址图7 4、选择西门子报文111图84.FB284功能块如下:图95.常见问题及解决办法(1)常见问题1、无所选设备型号2、无法在线检测3、无法选择E-POS控制模式(2)解决办法1、如果找不到所选设备型号是因为伺服软件V-ASSI版本过低,请更新到1.052、如果无法在线检测则把系统改为WIN-7版本,驱动不支持WIN-8及以上的系统。
SINAMICSV90伺服驱动系统

SIEMENS最新的小型伺服系统SINAMICS V90 最新发布
V90大惯量
2013年8月
Unrestricted © Siemens AG 2015 All rights reserved. Page 4
V90小惯量 2015年11月
SINAMICS V90小惯量系统
用于高动态性能的场合
最新发布
高速、精确定 位
SINAMICS V90伺服系统亮点-功能
3倍过载
自动震动抑制
高速脉冲输入1MHz
Unrestricted © Siemens AG 2015 All rights reserved. Page 13
SINAMICS V90的软件工具 V-ASSISTANT
--调试诊断更直观、更容易
Unrestricted © Siemens AG 2015 All rights reserved. Page 2
1 小型伺服系统SINAMICS V90 2 SINAMICS V90的主要特点 3 SINAMICS V90 的系统典型配置
Unrestricted © Siemens AG 2015 All rights reserved. Page 3
Unrestricted © Siemens AG 2015 All rights reserved. Page 6
SINAMICS V90
-- 灵活、高效
状态指示灯 集成操作面板
安全的防错接头
制动电阻连接头
Unrestricted © Siemens AG 2015 All rights reserved. Page 7
SINAMICS V90伺服系统亮点-功能
位置控制,速度控制,力矩控制
基于西门子S7-200SMART的SINAMICSV90位置控制应用

基于西门子S7-200SMART的SINAMICSV90位置控制应用作者:***来源:《数字技术与应用》2020年第07期摘要:为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,本文探讨了基于西门子S7-200 SMART系列PLC和SINAMICS V90伺服系统的位置控制方法。
通过介绍系统软硬件构成及其特点,详细论述了PLC系统通过外部脉冲位置控制模式控制伺服电机,以实现相对运动的过程。
关键词:S7-200 SMART;SINAMICS V90;位置控制中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2020)07-0001-02随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。
因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。
位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。
1 SINAMICS V90伺服驱动简介西门子SINAMICS V90是2013年推出的小型、高效便捷的標准运动控制伺服驱动系统,配合使用SIMOTICS S-1FL6伺服电机。
SINAMICS V90伺服驱动支持九种控制模式,包括四种基本控制模式(外部脉冲位置控制模式、内部设定值位置控制模式、速度控制模式、转矩控制模式)和五种复合控制模式。
2 西门子S7-200 SMART实现对SINAMICS V90的位置控制方法2.1 主要设备西门子S7-200 SMART ST20型PLC,SINAMICS V90伺服驱动器,SIMOTICS S-1FL6伺服电机。
2.2 系统构成SINAMICS V90伺服驱动器与PLC连接起来,Q0.1与PTIA_24P相连,Q0.2与PTIB_24P 相连,Q0.4与EMGS相连,Q0.5与SON相连,Q0.6与RESET相连,SINAMICS V90伺服驱动器与SIMOTICS S-1FL6伺服电机连接。
2.3 控制程序的设计要求现对上述系统提出控制要求:伺服电动机驱动滚珠丝杆,滚珠丝杆螺距为6mm,机械减速比为1,脉冲当量为1um/p,伺服电机带增量编码器分辨率为10000。
伺服V90

1122
1100
99..5544
88 1122
B
66 1100 44 88 22 0606 4400
99..5544 33..99
BB
A
11..55
11000000 22000000 33000000440܈0܈000˄0˄335r.5rp.90p90m0m000˅˅
安全功能
通过端子实现安全扭矩停止功能
操作面板 (BOP)
内置、6 位 /7 段显示屏、5 个按键
4
SINAMICS V90 light
丰富全面的接口,可靠耐用的设计
状态指示 • RDY指示驱动就绪/报警 • COM 指示通信状态
操作面板 • 6位LED • 5个按键
安全扭矩停止(STO)
24V控制电源接口
11FFLL44004422--11AAFF2211--11AA 00
00..99
00
00 11000000 22000000 33000000 44000000 55000000
˄˄܈܈rrppmm˅˅
注:
11FFLL44004422--11AAFF2211--11AA 00
A: 连续运行区
2.35
风扇冷却 2.5
Mini USB 双通道,5 V 高速差分信号通道和 24 V 单端信号通道 5 V 差分信号,A/B/Z 相 10 个输入,NPN/PNP;6 个输出,NPN 2 个模拟量输入,+/-10V,13 位 2 个模拟量输出,输出电压范围为 +/-10V,10 位
3
SINAMICS V90 light
伺服控制V90伺服最常用的模式汇总

伺服控制V90伺服最常用的模式汇总西门子公司为适应小型运动控制需求,推出一款小型高性能伺服SINAMICS V90。
SINAMICS V90 伺服驱动和 SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW到7.0kW以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,传送,收卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合实现丰富的运动控制功能。
分为脉冲序列版本(PTI)和PROFINET版本(PN)两种,如下图所示:支持以下几种运动模式:1)外部脉冲位置控制模式(PTI)2)内部设定值位置控制模式(IPOS)3)速度模式(S)4)转矩模式(T)PTI是伺服应用中最基本使用最频繁的模式,我们一起来学习如何使用该模式。
通过PLC发送高速脉冲来驱动伺服进行定位,对于伺服的调试较为简单,繁琐的是在PLC中编写高速脉冲输出程序。
首先应该对外部硬件连接,如下图所示。
接下来开始对参数进行调试,可以通过驱动器面板和V-ASSISTANT软件两种方式调试参数,但软件与驱动器连接后面板则无法使用。
此处简单介绍面板设置参数的方法,面板如下图所示。
在设置参数前最好先进行恢复出厂设置,恢复完成后断电重启,方法如下图所示:所有参数调试完成后都需要进行断电保持设置,将修改的参数存储到ROM保持区,否则断电后恢复缺省值,方法如下图所示。
设置参数步骤如下图所示:在进入参数设置前需要选择正确的参数组号如P0A,0B,0C,0D等,也可选择P ALL组,进入后通过<移位键来修改参数编号,如下图所示。
注意:初次上电驱动器未与PLC相连时,常出现F7491 、F7492和A52902号错误。
原因为顺时针行程限制信号(CWL)和逆时针行程限制信号(CCWL)以及急停(EMGS)这三个信号为OFF。
V90伺服最常用的PTI调试

V90伺服最常用的PTI调试西门子公司为适应小型运动控制需求,推出一款小型高性能伺服SINAMICS V90。
SINAMICS V90 伺服驱动和SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW到7.0kW以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,传送,收卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合实现丰富的运动控制功能。
分为脉冲序列版本(PTI)和PROFINET版本(PN)两种,如下图所示:支持以下几种运动模式:1)外部脉冲位置控制模式(PTI)2)内部设定值位置控制模式(IPOS)3)速度模式(S)4)转矩模式(T)PTI是伺服应用中最基本使用最频繁的模式。
通过PLC发送高速脉冲来驱动伺服进行定位,对于伺服的调试较为简单,繁琐的是在PLC中编写高速脉冲输出程序。
首先应该对外部硬件连接,如下图所示。
接下来开始对参数进行调试,可以通过驱动器面板和V-ASSISTANT软件两种方式调试参数,但软件与驱动器连接后面板则无法使用。
此处简单介绍面板设置参数的方法,面板如下图所示。
启,方法如下图所示:所有参数调试完成后都需要进行断电保持设置,将修改的参数存储到ROM保持区,否则断电后恢复缺省值,方法如下图所示。
设置参数步骤如下图所示:在进入参数设置前需要选择正确的参数组号如P0A,0B,0C,0D等,也可选择P ALL组,进入后通过<移位键来修改参数编号,如下图所示。
注意:初次上电驱动器未与PLC相连时,常出现F7491 、F7492和A52902号错误。
原因为顺时针行程限制信号(CWL)和逆时针行程限制信号(CCWL)以及急停(EMGS)这三个信号为OFF。
默认必须为ON才可运行,如果实际使用时无需用到这三个功能,可通过把P29300的第1、2、6位设为1来强制为ON,如下图所示。
V90伺服111报文插入使用
V90伺服111报⽂插⼊使⽤
西门⼦V90伺服111报⽂
的插⼊及使⽤
软件版本:TIA V14 SP1 Professional
1、在硬件⽬录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后⼀个设备可以看到V90伺服,将其拖⼊⽹络视图中,如下图所⽰
3、进⼊伺服设备视图,选择“以太⽹址”,设置“⼦⽹”和“IP地址”
4、⼦⽹设置好,回到⽹络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借⼝_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所⽰,下⾯还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的⼦模块⾥选取“西门⼦报⽂111,PZD-12/12”,拖到伺服的设备概览图
7、报⽂拖进以后,查看报⽂属性,选择“硬件标识符”,可以看到该报⽂标识符为“280”,下⾯需要⽤到此标识符
8、在程序段⾥,插⼊FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库⾥的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上⾯的伺服设备匹配,将HWIDSTW,HWIDZSW设为报⽂标识符280。