高精度激光测距关键技术研究
月球激光测距中的关键物理与技术问题
月球激光测距中的关键物理与技术问题
月球激光测距是一种精密测量技术,用于确定地球和月球之间的距离和位置。
在测量过程中,先通过地球上的激光发射器发射脉冲激光束,照射月球表面的反射器,然后测量激光束回到地球的时间。
通过测量这个时间差,可以精确计算出地球和月球之间的距离。
这种技术在探测月球、研究月球结构和地质特征以及确定月球位置等方面都有着重要的应用。
然而,由于月球表面的特殊性质和激光测量的高精度要求,月球激光测距中涉及到多种关键的物理和技术问题,例如:
1. 弱信号检测技术:由于月球表面反射的激光束非常微弱,因此需要使用高灵敏度的光电探测器和信号放大器来检测信号。
2. 光学系统稳定性:在激光测距的过程中,光学系统受到多种干扰,例如大气扰动、震动和温度变化等,这些因素都会降低测量精度。
因此,需要采用一系列的优化措施,例如利用高精度光学元件、制造支撑结构和保持恒温等手段来保证光学系统的稳定性。
3. 发射激光束的能量和功率:月球激光测距需要发射能量较高的激光束,以便能够到达月球表面并被反射回来。
然而,过高的能量和功率可能会对月球表面造成不必要的破坏,因此需要对激光发射器进行精确的能量和功率控制。
4. 数据处理和分析方法:月球激光测距所得到的数据需要进行
复杂的处理和分析,以确定地球和月球之间的精确距离和位置。
这一过程需要使用高级数学和计算机模拟技术,同时需要考虑各种误差来源的影响。
总之,月球激光测距所涉及的物理和技术问题十分复杂,需要多方面的技术支持和研究,才能确保测量精度和可靠性。
基于TDC—GPl的高精度激光测距研究

( 1 E 京交通大学 电子信息工程学院, 北京 1 0 0 0 4 4 ;
2 . 中 国科 学 院半 导 体 研究 所 , 北京 1 0 0 0 8 3 ; 3 . 潍 坊 港 华燃 气 有 限公 司 , 山东 潍坊 2 6 1 0 0 0 )
要求 。
关键 词 : 时 间 间隔 测量 ; T D C — G P 1 ; 高精 度
中图分 类 号 : T N 7 1 0 . 6 文献 标 识 码 : A 文章 编 号 : 1 6 7 3 — 1 2 5 5 ( 2 0 1 3 ) 一 0 1 — 0 0 6 0 — 0 6
Hi g h Ac c u r a c y La s e r Ra n g i n g Re s e a r c h Ba s e d o n TDC- GP1
第2 8 卷第 1 期
2 0 1 3 年2 月
光 电技术应 用
EL ECT R0一 OP T I C TE CHNOL OGY AP P LI CAT I ON
VO 1 . 2 8. No . 1
F e b r u a r y,于T D C— GP 1 的高精 度激光测距研究
Abs t r a c t :M e a s ur e me nt a c c u r a c y o f t i me i n t e r v a l p l a y s a d e c i s i v e r o l e i n r a ng i n g a c c u r a c y i n l a s e r r a n g i ng p r o c e s s . Ac c o r d i n g t o me a s u r e me n t a c c u r a c y o f t i me i n t e r v a l , a hi g h a c c u r a c y me a s u r e me n t me t ho d i s p r o po s e d b a s e d o n TDC—GP1 c o u nt i ng c h i p. Ti me i n t e r va l i s d i r e c t l y c o nv e r t e d i n t o h i g h a c c u r a c y n u mb e r . I n c o r p o r a t e d wi t h t h e i mp l e me n t me t h o d s o f s o f t wa r e a n d h rd a wa re ,TDC— GP1 i s c o n  ̄o l l e d b y DSP c h i p t o p e fo r r m i t me i n t e r v a l me a — s u r e me n t o f s i n g l e —c ha nn e 1 . Ti me i n t e va r l me a s u r e me n t p r o c e s s i s c o mp l e t e d b y i n ne r c o rs a e c o u n t e r s nd a in f e d e l a y t i me c h nn a e l s . Ti me i n t e r v a l t o be t e s t e d i s d i r e c t l y c o nv e  ̄e d i nt o d i g i t a l r e a d o u t . Th e e x p e ime r n t r e s u l t s s ho w t ha t t h e mo d u l e ha s f a s t me a s u r e me n t re f q ue n c y , go o d l i n e a r i t y , a n d t he s i ng l e p u l s e me a s ur e me n t a c c u r a c y i s l e s s t ha n 1 0 0 p s , wh i c h c a n me e t he t r e q u i r e me n t s o f s p e e d me a s u r e me n t a n d a c c u r a c y i n d i f f e r e n t a pp l i c a t i o n s .
提高相位激光测距精确度的研究
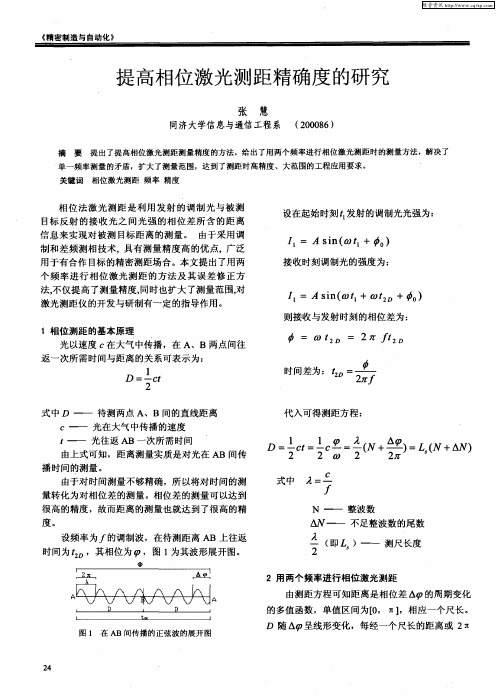
由于对 时 间测 量不够 精确 ,所 以将对 时 间 的测 量 转化 为对 相位 差 的测量 。相位 差 的测量 可 以达 到 很 高 的精度 ,故而 距离 的测 量 也就达 到了很 高 的精
度。
式中 N — — 整 波数 △Ⅳ— — 不足整 波数 的尾 数
设频 率 为 厂 的调制 波 ,在 待测距 离 AB 上往 返
激光 测 距仪 的开 发 与研制 有一 定 的指 导作用 。 1相位 测距 的基 本 原理
设 在起 始 时刻 t 射 的调制 光光 强 为 : l 发
I = A sn mt+ o l i ( ) l
接 收时刻 调制 光 的强度 为 :
I = A sn ct+rtD+ o l i(ol o2 )
则 接 收与发 射 时刻 的相位 差 为:
光 以速 度 C在 大气 中传 播 ,在 A、B两 点 间往
返一 次所 需 时间与 距离 的关 系可 表示 为 :
D : c f 2
= tD = 2刀 f 2 tD 2
时 间差 为 :
式 中 D — — 待测 两 点 A、B 间的直 线距 离
和 “ 比较试 探法 ”来 有效 地 处理测 尺 衔接 的 问题 。
31 中运算法 .置 所 谓 置 中运 算 法 ,也称 “ 5 凑 ”运算 法 。就 是
以精测 的高位 ( lm 测 尺 的米位 ) 为对 粗测米 如 O 作
位 进 行 处理 的依据 。 米位 不 同的 数值 的调 整数 列于 表 2 。
C— — 光 在 大气 中传 播 的速 度 t—— 光往 返 A B一 次所 需 时间
代入 可 得测距 方程 :
D :一 1
由上式 可知 ,距 离测 量 实质 是对 光在 A 间传 B
高频相位激光测距系统的高精度鉴相
第 31 卷第 15 期2023 年 8 月Vol.31 No.15Aug. 2023光学精密工程Optics and Precision Engineering高频相位激光测距系统的高精度鉴相孟语璇1,2,董登峰1,2*,周维虎1,2,纪荣祎1,2,朱志忠1,2(1.中国科学院微电子研究所,北京 100029;2.中国科学院大学,北京 101408)摘要:相位测距是一种非常重要的绝对测距手段,是大尺寸精密测量的重要保障。
提高激光调制频率并采用高性能器件实现高频采样分析是提升相位激光测距精度最有效的方式之一。
针对高性能器件的最大采样频率总是受限,难以满足高调制频率采样的难题,分析验证了欠采样方法用于相位测距的可行性,同时仿真分析了全相位傅里叶频谱分析法(all-phase Fast Fourier Transform,apFFT)提高鉴相精度的优势。
在此基础上,提出“欠采样+ apFFT”的方法,并构建了激光相位测距的鉴相系统。
当调制频率为201 MHz,欠采样频率为100 MHz时,系统鉴相精度高于±0.04°,对应的测距精度为±0.08 mm。
实验结果表明,基于“欠采样+apFFT”的相位测距方法具有高精度、抗干扰能力强等优势,在科学研究与工程应用中具有重要价值。
关键词:相位测距;欠采样;全相位频谱分析法;高精度;鉴相系统中图分类号:TN249;TH711 文献标识码:A doi:10.37188/OPE.20233115.2193High-precision phase discrimination for high-frequency phaselaser ranging systemMENG Yuxuan1,2,DONG Dengfeng1,2*,ZHOU Weihu1,2,JI Rongyi1,2,ZHU Zhizhong1,2(1.Institute of Microelectronics of the Chinese Academy of Sciences, Beijing 100029, China;2.University of Chinese Academy of Sciences, Beijing 101408, China)* Corresponding author, E-mail: dongdengfeng@Abstract:Phase laser ranging is an important means of absolute ranging and an important guarantee for large-scale precision measurement. One of the most effective ways to improve the precision of phase laser ranging is to increase the laser modulation frequency and use high-performance devices to achieve high-fre⁃quency sampling analysis. However, the maximum sampling frequency of high-performance devices is lim⁃ited. To solve the problem that existing devices have difficulty in the sampling of high modulation frequen⁃cies, the feasibility of an undersampling method for phase ranging was analyzed and verified. The advan⁃tages of all-phase fast Fourier transform (apFFT) analysis was examined to improve the precision of phase laser detection. Based on this idea, the method of undersampling and apFFT was developed, and a phase detection system for laser phase ranging was constructed. When the modulation frequency is 201 MHz and the undersampling frequency is 100 MHz,the system phase discrimination accuracy is higher than 文章编号1004-924X(2023)15-2193-10收稿日期:2023-02-13;修订日期:2023-03-13.基金项目:国家重点研发计划资助项目(No.2020YFB1710500,No.2019YFB2006100);国家高质量发展专项(No.TC220H05T)第 31 卷光学精密工程±0.04°, and the corresponding ranging accuracy is approximately ±0.08 mm. The experimental results show that the phase ranging method based on undersampling and apFFT has the comprehensive advantag⁃es of high accuracy and strong anti-interference ability, making it valuable for scientific research and engi⁃neering applications.Key words: phase ranging;under-sampling;all-phase fast fourier transform;high precision;phase dis⁃crimination system1 引言相位式激光测距技术具有响应快、量程大、抗干扰能力强、精度高等优点,被广泛应用于航空、航天、船舶和机器人等大型装备制造领域[1-6]。
基于重采样技术的调频连续波激光绝对测距高精度及快速测量方法研究

整形作为发射光源 (测量臂), 回波信号再经准直镜 头接收, 经环形器后跟另一束激光通过耦合器合为 一束, 在光电探测器表面发生干涉. 干涉信号的频 率 f 可由图 2 简单推导得出. f =2· B · OPD n·B·z =4· , Tm · c Tm · c (1)
Tm ࣀ થ η Ղ f
णАጜ FC ܱᑿरԻូៈ ༏А٨ ᏹՌ٨ FC FC FC
率以及降低对激光器调谐带宽的要求, 且根据双光 路调频连续波测距系统的特性, 提出了简易快速的 测量数据处理方案, 集成方便紧凑的测距系统.
2 测距原理及提高测距分辨率方案
双光路调频连续波激光测距系统的原理图如 图 1 所示. 系统光源为可调谐激光器, 发射激光为 线性调制激光, 其光频按照周期性三角波的规律变 化, 如图 2 所示, 纵坐标为光频, 横坐标为时间. 该 系统的测量干涉光路 (下半部分) 和辅助干涉光路 (上半部分) 均为马赫曾德尔干涉光路, 辅助干涉光 路可与测量光路同光源同时工作, 且光程差远大于 测量光路, 因此可对测量光路获得的干涉信号进行 等光频间隔采样, 从而补偿光源频率调制的非线性 引入的测量误差. 对多次不同测量的等光频间隔采 样的信号进行拼接可实现对激光光源调制带宽的 拓展, 从而提高测距分辨率.
64232015230601范围为1通过新技术或者对调谐激光器进行补偿的方法如使用光学频率梳对激光光源扫描波长锁定或重采样技术规避或补偿由于激光光源代入的系统误差已经取得了较大进展如2009年roos利用光纤自混频技术对光源系统进行了改进且对距离15m的目标进行测量测距分辨率达到了312013年baumann利用学频率梳对激光器的光频进行校正将测距分辨率提高到了130重复精度达到了6nm12本课题组于2012年开始进行提高调频连续波激光测距系统分辨率的研究采用重采样的方法对测量分辨率进行优化取得了一定的进展1314但是大范围扫频带来的频率调制非线性依然是一个未解决的难题本文开展研究解决这一问题
基于激光测距的室内定位算法的设计与研究
IT大视野数码世界 P.64基于激光测距的室内定位算法的设计与研究张天 牛青研 牛长流 常惠 阴翔芸 北方工业大学摘要:物联网领域中,人们对于室内移动物体的定位与跟踪位置的服务需求逐渐在各个领域得到提升,随着数据业务和多媒体业务的快速增长与发展,人们在复杂的室内环境中对定位和导航的需求日益增大。
基于激光精度高,速度快的特点,激光测距的定位技术已经成为研究与应用的主要方向。
本文提出一种基于激光测距系统对室内环境实时扫描从而推算自身位置信息的室内运动物体的定位。
关键词: 室内定位 激光测距 定位算法 跟踪定位引言在移动互联网技术快速发展和普及的今天,通信技术快速发展,在生活中位置服务越来越重要。
基于位置的服务主要包括室外定位和室内定位,在开阔的室外环境下,GPS在室外位置获取表现突出,并且被各行各业所使用,借助于基站和GPS定位即可达到精确的定位和导航效果。
室内环境中,因为建筑物削弱了GPS的信号,GPS无法覆盖室内环境,所以一种在室内环境下精确的定位方法显得尤为重要。
近年来基于激光测距的室内定位技术越来越受到学术界和工业界的重视,基于激光测距定位技术是当前室内定位技术研究的重点和热点,其优势在于激光测距的高精度与高速度。
随着激光测距技术的成熟和广泛应用,基于激光测距的定位技术已经成为研究和应用的主要方向。
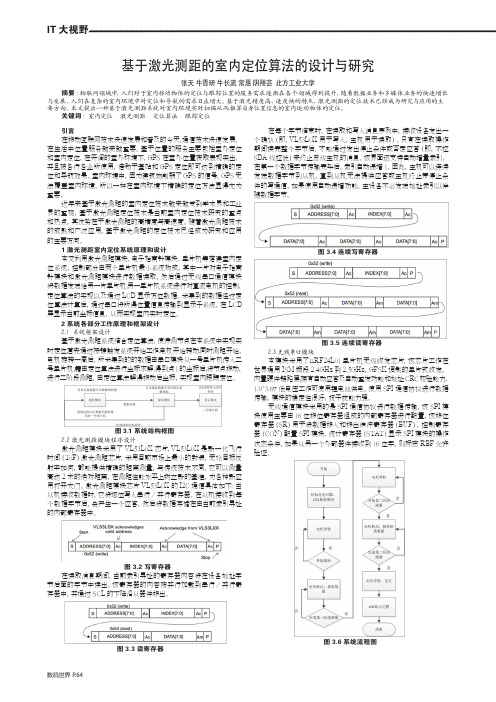
1 激光测距室内定位系统原理和设计本文利用激光测距模块、电子指南针模块、单片机等搭建室内定位系统,控制部分由两个单片机最小系统构成。
其中一片对电子指南针模块和激光测距模块进行数据读取,然后通过无线串口通信模块将数据发送给另一片单片机。
另一单片机系统进行对直流电机的控制,定位算法的实现以及通过LCD显示方位数据。
采集到的数据经过定位算法计算后,通过串口将所得位置信息传输到显示子系统,在LCD 屏显示当前坐标信息,从而实现室内实时定位。
2 系统各部分工作原理和框架设计2.1 系统框架设计基于激光测距系统结合定位算法,使待测节点在本系统中实现实时定位,首先通过按键触发系统开始工作,电机开始转动,同时测距开始。
高精度快速激光相位测距技术研究

高精度快速激光相位测距技术研究一、本文概述随着科技的飞速发展,激光测距技术因其高精度、快速响应和广泛应用性,在测量领域扮演着日益重要的角色。
其中,激光相位测距技术以其高精度和长距离测量能力,成为了研究的热点。
然而,传统的激光相位测距技术面临着精度和速度之间的矛盾,即提高测量精度往往以降低测量速度为代价。
因此,开展高精度快速激光相位测距技术研究,对于推动激光测距技术的发展,提高测量精度和效率,具有重要的理论价值和实践意义。
本文旨在研究高精度快速激光相位测距技术,通过对现有激光相位测距技术的分析和研究,提出一种新型的激光相位测距方法。
该方法能够在保证测量精度的同时,提高测量速度,从而满足现代测量领域对于高精度、快速响应的需求。
文章将首先介绍激光相位测距技术的基本原理和现有技术的发展现状,分析目前存在的问题和挑战。
然后,详细阐述本文提出的新型激光相位测距方法的基本原理和实现过程,包括激光发射与接收、相位提取、距离计算等关键步骤。
接着,通过实验验证该方法的可行性和性能,分析其在不同条件下的测量精度和速度表现。
讨论该技术在实际应用中的潜力和限制,以及未来可能的研究方向和应用前景。
通过本文的研究,希望能够为高精度快速激光相位测距技术的发展提供新的思路和方法,推动激光测距技术在测量领域的广泛应用,为科技进步和社会发展做出贡献。
二、激光相位测距技术原理激光相位测距技术是一种基于激光干涉测量原理的高精度距离测量技术。
其基本原理是利用激光的相干性,通过测量激光在待测距离上往返传播所产生的相位差,从而计算出待测距离。
激光发射器发出稳定的激光束,经过分光器分成两路,一路作为参考光路,另一路作为测量光路。
测量光路中的激光经过待测物体反射后,与参考光路中的激光在光电探测器上发生干涉。
由于待测距离的存在,测量光路中的激光会产生一定的相位延迟,这个相位延迟与待测距离成正比。
光电探测器将干涉信号转换为电信号,然后经过信号处理电路进行放大、滤波和数字化处理。
脉冲激光测距技术研究

• 63•本文基于对脉冲激光测距技术的了解,阐述了激光测距原理方法,对脉冲激光测距的关键指标进行了分析。
同时搭建了脉冲激光测距验证样机,通过光纤延时法模拟激光测距,并通过国军标消光比法验证了激光测距机的最大测程。
1 激光测距原理方法激光测距的原理是激光发射模块发射激光射向远处目标,通过对目标反射回来的激光信号进行相关解算,最终得出目标物的距离。
根据不同的时间测量方式,激光测距可分为以下两种方法:第一,脉冲激光飞行时间测距法,具体是通过计算激光发射与回波脉冲接收时刻的时间差来计算距离值;第二,调制波相位测距法,主要是通过对连续波激光信号相位调制,在此基础上,对调制波往返目标与测距机产生的相位差进行解调计算出距离值。
2 脉冲激光测距关键指标分析脉冲激光测距的关键指标有最大作用距离、测距精度、准测率和虚警概率等,下面分别对其进行分析。
2.1 最大作用距离激光雷达方程是表示发射的激光功率与接收到的激光功率之间关系的方程,其表达式为:P r 为接收光功率(W );P t 为激光发射功率(W );A 为朗伯面的面积(m 2);ρ目标反射系数;D 为接收器口径(m );R 为测距机到目标的距离;t a 为大气透过率;η1为发射器光学系统效率;θt 为光束发散度(rad );η2为接收器光学系统效率。
由此计算出激光测距最大作用距离为:如上方程所示,要想提高最大作用距离,可以使用提高探测器响应度,提高发射功率,提高发射、接收效率,增大接收天线面积,增大目标反射截面,减少束散角等方法,大气透射率是系统不可决定的因素,在此不作讨论。
其中,提高激光发射功率受限于系统体积、重量、功耗和散热条件;提高发射接收效率的提升空间有限;增大接收天线面积同样受体积、重量限制;增大目标反射截面受目标类型限制;减少束散角受系统跟、瞄精度限制。
最简单易行的措施采用高灵敏度的探测器来提高接收功率,从而提高作用距离。
2.2 测距精度激光测距的误差主要来自时间测量的误差,这种误差通常分为两种:第一,静态误差,包含延迟误差、脉宽误差等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度激光测距关键技术研究摘要:脉冲激光测距精度受多种因素的影响,其主要原因是接收功率的偏差,而回波功率的大变动是造成这种误差的根本原因。
因此,实现高精度的定位是未来的发展方向。
本文重点讨论了激光测距仪的小型化、轻量化、高动态范围高精度激光测距技术的发展趋势。
关键词:高精度;激光测距前言:随着激光器、探测器件和集成电路技术的发展,激光测距仪逐渐走向了长距离、高精度、微型化的发展。
近几年,随着太空仪器的竞争日益加剧,我国利用卫星上的激光雷达进行遥感探测的优势已经被全世界的专家所认可,美国、欧空局、日本等国家的航天机构也在大力开发星基激光探测装置。
所以,开展高精度的激光探测技术,对于增强我国空间技术的竞争能力具有重要意义。
1激光测距方法概述1.1脉冲法脉冲激光测距技术是激光测距技术中最早的一种测距技术,它是利用激光脉冲的瞬时功率和瞬时功率,在无协同目标的条件下,由被测物体的漫反射波进行测距。
在地形测量、工程测量、云和飞机高度测量、战术前沿测距、导弹轨道跟踪、人造地球卫星测距、地月测距等方面都有广泛的应用。
激光测距的脉冲法是将一束激光脉冲或一串激光射向目标,再由计数仪测量激光到达和到达目的地所需要的时间,以此来确定与目标的距离。
它的工作原理和结构比较简单,测距远,功耗低,一次测量就能得到一段距离,但是它的绝对测距精度很低。
测量的时间宽度、测量光波速度、大气折射率、时钟频率误差、计时误差、仪器测量误差等都会对测量结果产生一定的影响。
另外,激光脉冲测距一般采用红宝石、YAG等固体激光器,输出功率大,测量距离宽,但体积较大。
1.2相位法相位法激光测距是通过测量被测物体发出的调制光与所接收的反射光的强度相差所包含的距离信息,从而达到测量被测物体的距离。
为确保测量的准确性,一般都会在被测物体上安装一个反射镜,也就是所谓的协作对象。
在不合作的情况下,它的影响范围通常在数米到数十米之间;在使用协作对象的情况下,其有效射程可以达到数万米,测量精度达到毫米,相对误差在百万分之一左右。
该发射模组发射一束经调制的激光,待测目标发射后再返回,并与所测光进行相位偏移。
利用测量激光调制信号在被测距离内来回传播产生的相位变化,间接地测定了被测点与被测物体间的距离。
1.3干涉法干涉测量是精确测量距离的一种经典方式。
理论上,该方法也属于测距的相位法,但其测量的是未经调制的光波自身的相位干扰,而非相位干涉。
干涉测距技术是指通过光学干涉原理,在激光中形成一种明、暗的干涉条纹,然后通过光电变换器件将其转化成电子信号,再通过计数器进行运算,以达到测量位移的目的。
由于光的波长很短,尤其是高单色的激光器,它的波长值很准确,因此,用干涉仪测出的距离可以达到1/2,并且具有微米的精确度。
由于采用了现代电子学技术,可以测量到0.01范围内的干涉条纹,因此,这种测量精度是其他测量手段无法比拟的。
2不同测距方法的比较与改进2.1不同方法的比较这些方法都有各自的优点和不足,根据工作环境和测量精度的不同,需要采取相应的测量手段。
脉冲法是一种测量激光发射时间的方法。
由于激光脉冲的能量比较集中,可以进行长距离的传播,因此该方法适用于测距,但是精度不高。
激光地测距与激光的发射功率、感光接收机的灵敏度等因素有关,而测量的准确度则与接收通道带宽、脉冲上升沿、探测器信噪比、时间间隔测量的准确度等因素密切相关。
为了消除或减小信号中的偏移和时域抖动,提出了一种基于时域的时域识别方法。
相位法是采用激光调制技术,通过对载波频率进行相位测量,从而避免了需要很长的时间间隔,提高了测距的准确度。
激光调制的相位测量精度和相位调制频率是影响测距精度的重要因素,要达到较高的测距精度,就需要对系统进行高精度的测距。
除了大气温度、气压、湿度等外在条件之外,还与测距机自身发射功率、平均测量次数、调制频率和稳定性有关。
该方法具有较高的精度,在小位移(通常不到1米)时,对测量的环境有较高的要求。
2.2测距方法改进从上述结果中我们可以看到,脉冲法与相位法的优点与不足之处在于,将脉冲法与相位法相结合,形成了一种新的距离测量方式,即脉冲—相位激光测距。
脉冲测量和相位法测量是利用脉冲信号的时差来完成的,而精确的测距则是利用脉冲信号的相位差来完成的。
脉冲-相位激光测距仪是一种将脉冲法与相位法相结合的仪器,它不仅可以达到不配合的激光测距,而且还可以达到相位激光测距的高精度;该方法不仅可以对被测对象进行持续的跟踪,而且还可以在有协作的情况下进行漫反射探测。
集成电路使得仪器体积小,重量轻;该测试系统采用了预编程序,实现了自动化。
3激光测距系统分析3.1测距原理在无配合条件下,无反射镜时,测量距离可达数十至数千米,通常使用脉冲激光进行测量。
图1示出了激光脉冲测量的工作方式。
激光测距机对齐后,激光会发出一道很强的、很窄的激光脉冲(从几毫微秒到十毫微秒),然后穿过光学系统的波束,使其发散角度减小。
当脉冲发出时,很少的光被分离出来,由检测器接收,并将其转化为一个电子脉冲,用作发送的基准信号,并对激光的发射时间进行标定。
当激光脉冲到达目标后,由于目标的漫反射,有一部分光线会被反射到接收望远镜中,然后经过窄带滤光片、光电探测器、放大处理电路、检测电路和检测电路,使其成为一个停止脉冲,使计数器的计时结束。
利用激光脉冲发射和激光回波接收的瞬间间隔,可以求出目标与激光测距机的径向距离。
图1脉冲激光测距工作原理示意图3.2系统构成图2是一种基于人造卫星的脉冲激光测距机。
整个系统由激光传输、激光接收、温度控制、信息处理和二次供电五部分组成。
在激光发射装置中,主要由激光和驱动电路组成。
该激光器具有高能量密度、快速上升沿激光脉冲信号的作用,使回声接收机具有较好的信号强度和较好的上升沿性能。
该激光器由一个与激光共振腔有关的光学部件组成,该激光扩束器与发射方向平行地设置在发射方向上。
激光驱动的电子器件置于激光器的共振腔之外。
激光二极管抽运的Nd:YAG(铷掺杂钇铝石榴石,Nd3+:YAG)激光器,其工作波长为1064nm,其增益系数高,热传导率大。
激光脉冲测距器通常采用TEM00型谐振腔,其光强度的空间分布为高斯。
为了降低激光的发散角度,增大激光的空间密度,增加激光的探测效率,必须在激光的出口处增加一个扩束器。
图2脉冲激光测距系统示意图激光接收装置中,接收装置由接收望远镜、滤波器、主、回波检测、放大处理、辨识电路等构成。
主要有两类典型的光学结构:第一类是大F、小视野的反射型或折射型光学;第二类是在较低F和较大视野的情况下使用的折射型光学系统。
折射型望远镜一般是由多个透镜构成,其结构紧凑,可有效地把来自物体的反射光能集中到检测器的感光面上。
接收望远镜的光学设计要求保证激光传输轴线与其视轴平行,而接收望远镜的视野要比激光发散角度大,这样才能保证从目标反射的激光能进入到望远镜的接受视野。
同时,为尽量减少本底辐射对接收光路的干扰,必须增加带宽不超过5nm的窄带滤波器,以滤除工作频段之外的背景辐射,从而改善系统的信噪比。
在主波导检测器中,PIN光二极管是最常用的,而在回声接收方面,采用了更高灵敏度的Si-APD。
该信号经过放大、处理、识别,生成控制脉冲信号,用于定时测量模块的启动和停机。
一般采用边缘辨识和恒定比例辨识。
在信息处理单元中,所述信息处理单元负责协调、控制激光发射单元、激光接收单元、温度控制单元之间的协同工作,并对主波TTL信号和回声TTL信号进行时间间隔进行A/D遥测取样、处理单元所提供的数据,并与卫星进行数据交换。
在信息处理系统中,主、回波的时间间隔测量是一项非常重要的工作,通常有两种方式:(1)利用高频晶体振荡进行计数,其优点是能够进行大范围地测量,而且容易实现,但其时域分辨率受限于时钟信号的频率;(2)采用了特殊的时间间隔测量芯片,具有较高的时间分辨率,但是由于芯片的应用环境,其测量范围受到了限制。
在温度调节装置中,激光的抽运源由于其物理性质的特殊性,需要在一定的工作温度条件下工作:回声接收望远镜和激光扩束器在轨道上工作时,会引起温度的变化,从而引起器件的热应力和热变形,从而使测量失效。
由于激光测距仪在空间中会遇到较大的热源,因此需要对其光学部件进行适当的热控,以提高其温度分布状况,确保其工作正常。
3.3关键技术高精度激光测距系统的核心技术在于:第一,对Si-APD倍增系数进行了研究,并根据Si-APD倍增系数随偏压的变化特点,改善了系统的动态范围;第二,由于目标的距离不同,反射激光的回声功率也会有一定的影响,分析了产生这种情况的原因,给出了一种基于放大器的自动增益控制方案;第三,由于目标的距离不同,反射的激光回声功率也会随之改变,从而导致回声功率的偏移;第四,利用微弱的信号探测技术,改善信噪比,尽量增加回声放大器的增益,增加系统的测距动态范围;第五,高线性、高稳定性的峰取样电路的设计;第六,采用亚纳秒级高的时间分辨间隔测量电路,降低了由于时间分辨率的限制导致的测量误差,并改善了系统的测距精度。
4脉冲激光测距系统精度分析测量结果和实际数据的差别叫作错误。
误差可以分为随机和系统性两种。
系统误差是按规定的规则所引起的误差,无法用增大的测量次数来消除,通常需要用试验分析的方法来把握其变化规律,并根据相关的规则采用补偿或校正的办法来减小。
在相同的情况下,对某一量进行反复的测量,其每一次的尺寸和符号均不受其变化规律的影响。
这是由于在测量过程中,由于各种随机因素的作用,这些因素并不明显,而且很难控制。
随机误差通常是由正态分布所决定的,并且是不可消除的。
在实际应用中,多次测得的实测数据可以用实际值来表达。
脉冲激光测距系统误差主要有固定延迟误差、时钟频率漂移误差、接收功率漂移误差等。
其中,随机误差包括识别抖动误差、波形畸变、时间间隔测量误差、数字电路上升沿抖动误差等。
5高精度脉冲激光测距仪系统构架高精度脉冲激光测距系统的组成方框图见图3。
该系统包括激光发射、激光接收、信息处理、辅助供电四大部分。
该激光驱动电路根据该信息处理装置的同步触发信号而生成一个控制信号,该控制信号驱动该被动Q激光器出光,该光脉冲经放大后发射。
一小部分的激光脉冲通过分光仪将其转化为电脉冲,由主波进行放大,然后将其输出到恒定时序标识电路和一条线路电平变换电路,生成LVTTL电平时间间隔测量模块使能时序控制信号Start(Start),一路主波峰取样电路。
将峰值脉冲信号的电平采集,然后将其输出至模拟-数字转换器,用于AD的数据采集。
图3激光测距仪架构示意图输出的激光在靶面上散射,由接收望远镜接收,经过窄带滤光片滤除频段外的背景辐射,最后汇集于硅光雪崩二极管,并将其转换成电脉冲。
放大器分为两个阶段,第一级放大器的增益在1至100之间,第二级的放大器在1至12之间,在两级运算放大器的总增益超过某一特定值时,为了减小噪声和增加信噪比,必须对其进行自相关。