自升式平台齿轮齿条升降系统结构设计
自升式海洋平台齿轮齿条升降装置有限元分析

附件接 触 ,此 区域 是最容 易发 生点蚀 。因此主要针 对 05 . s时刻 单 齿啮合 时齿轮 齿 条进 行强 度分 析 。图 8为齿轮 齿条接 触部位 应 力分布 云 图。如 图 8a和 图 8b所 示 ,小 齿轮 与 齿条接 触 区域呈 带状 分布 , () () 沿 小齿 轮 中截面应 力 分布前 后对称 ,最 大接触 应力 分布 于 小齿轮 上 ,小齿 轮与 齿 条接触 边缘 区域 应力 较 大 ,且应 变较大 。
沿 小齿轮 厚度 方 向的应 力变化 曲线 。小齿轮 沿厚度 方 向最大 应 力为 10MP 4O a左右 ,主 要集 中在 小齿 轮 与齿条 接触 的两边 边缘 部位 ,其 余接 触部位 应力 为 10MP 20 a左右 ,分布 比较 均匀 。齿条沿 齿 厚方
向最 大应 为为 1 5 MP 2 0 a左 右 ,主要 集 中与齿 条两 侧边 缘部 位 ;最 小应 力 为 9 0 a左右 ,最 大应 力 0 MP
。
MI se;
S Mi e¥ s
(u : 5 ) A g 7%
(v : 5 A g 7 %)
. .
广 T +10 e+03 .6 7
一
.2o 12i .+ 4 e
2
.
.
.
+2 8+ ,0 3l 0 e
t+ 80 21 .+ 3 e
()齿轮接触部位 a
.
,
7为齿轮 齿条接 触 区域 最 大接触 应 力随 时间变化 的历 程 曲线 。由图 7可 以看 出 , . s 右 由双齿 啮合 03 左 5 区逐渐过 渡 到单齿 啮合 区,双 齿 啮合 区最大接 触应 力变 化 范 围为 80 9 0 a 0 ~ 0MP ,单齿 啮合 区最 大接触
齿轮齿条式升降机结构原理
齿轮齿条式升降机结构原理一、引言齿轮齿条式升降机是一种广泛应用于工业和民用领域的升降设备,其结构原理非常重要。
本文将全面、详细、完整地探讨齿轮齿条式升降机的结构原理。
二、齿轮齿条式升降机的作用和应用齿轮齿条式升降机主要用于在垂直方向上进行物体的升降运输。
它通常应用于货物搬运、车辆停放、货物仓储等场合,具有占地面积小、运行平稳、安全可靠等优点。
三、齿轮齿条式升降机的主要组成部分齿轮齿条式升降机包含以下主要组成部分:1. 齿轮和齿条齿轮和齿条是齿轮齿条式升降机的核心组件。
齿轮通常由金属制成,具有一定的硬度和耐磨性。
齿条则是一根长条,上面有一系列的齿槽,与齿轮的齿相啮合,通过转动齿轮来实现升降运动。
2. 电动机和传动装置齿轮齿条式升降机需要电动机作为动力源。
电动机通过传动装置将动力传递给齿轮,驱动齿轮旋转,从而带动齿条进行升降运动。
3. 上下限位开关用于控制齿轮齿条式升降机的上下运行范围。
当升降台抵达上下限位时,上下限位开关将自动切断电源,停止电动机的工作,确保升降台不会继续运行。
四、齿轮齿条式升降机的工作原理齿轮齿条式升降机的工作过程如下:1.电动机通过传动装置将动力传递给齿轮,驱动齿轮旋转。
2.齿轮的旋转使其上的齿槽与齿条的齿相啮合。
3.齿轮的旋转方向决定了齿条的升降方向,当齿轮顺时针旋转,齿条向上升起;反之,则齿条向下降落。
4.当升降台抵达上下限位时,上下限位开关将自动切断电源,停止齿轮的旋转,从而停止升降台的运动。
五、齿轮齿条式升降机的优缺点齿轮齿条式升降机具有以下优点:•结构简单紧凑,占地面积小。
•运行平稳,噪音低,震动小。
•功能齐全,可以根据需求进行定制。
然而,齿轮齿条式升降机也存在一些缺点:•速度相对较慢,不适用于大量货物的快速运输。
•对于较高高度的升降要求,齿轮齿条式升降机不太适用。
六、齿轮齿条式升降机的维护与保养为了确保齿轮齿条式升降机的正常工作,需要进行定期的维护与保养。
以下是一些常见的维护与保养措施:1.检查齿轮和齿条的磨损情况,如有需要及时更换。
海洋平台结构作业——自升式海洋平台升降结构

常见自升式海洋平台升降结构对比分析班级:学号:姓名:目录一、自升式平台简介 (3)二、现有常见升降结构 (4)1、圆柱型桩腿一单环梁液压升降装置 (4)2、方壳型桩腿—双环梁液压升降装置 (6)3、桁架型桩腿一齿轮齿条升降装置 (7)三、升降系统的对比 (8)1、桩腿结构形式对比 (8)2、触底形式对比 (9)3、升降装置对比 (10)4、动力源对比 (11)一、自升式平台简介自升式平台是一种海上活动式钻井装备,目前是我国海洋石油勘探中使用最多的一种钻井平台,由于其作业稳定性好和定位能力强,在大陆架海域的油气勘探开发中居极其重要的地位。
自升式平台主要由平台主体、桩腿、升降锁紧装置、钻井装置(包括动力设备和起重设备)以及生活楼(包括直升飞机平台)等组成。
平台在工作时用升降装置将平台主体提升到海面以上,使之免受海浪冲击,依靠桩腿的支撑稳定的站立在海底进行钻井作业。
完成任务后,降下平台主体到海面,拔起桩腿并将其升至拖航位置,即可拖航到下一个井位作业。
因此,支撑升降系统的结构对自升式海洋工作平台的安全有着至关重要的作用。
自升式平台的工作状态如图一所示。
图一二、现有常见升降结构支撑升降系统作为自升式平台中的核心部分,在平台的设计建造中历来受到高度重视,其性能的优劣直接影响到平台的安全和使用效果。
最常用的升降装置是齿轮齿条式和顶升液压缸式。
具体可见下表壳体桩腿是封闭型桩腿,其桩腿截面有圆形和方形两种形式;桁架式桩腿截面有三角形和四方形两种形式。
不同截面形状的桁架式和壳体式桩腿与不同类型的升降驱动方案相互组合,衍生出多种能够实现升降平台功能的支撑升降系统类型。
1、圆柱型桩腿一单环梁液压升降装置销子、销孔和项升液压缸是一种升降装置。
系统原理图如图二。
图二每一桩腿有两组液压动作的插销和一组顶升液压缸。
当装在环梁上的一组环梁销插入到桩腿的销孔中时,一组顶升液压缸的同步动作即可使环梁及销子带动桩腿(或平台主体)升降一个节距,然后进行换手:将锁紧销推入到桩腿的销孔中,退出环梁销,液压缸和环梁复位,下一个工作循环开始。
自升式平台齿轮齿条升降系统受力分析

2010年第39卷第12期第27页石油矿场机械OIL FIELD EQUIPMENT2010,39(12):27~30文章编号:1001 3482(2010)12 0027 04自升式平台齿轮齿条升降系统受力分析樊敦秋1,崔希君1,曹宇光1,2(1.胜利石油管理局钻井工艺研究院,山东东营,257017;2.中国石油大学(华东)储运与建筑工程学院,山东东营,257061)摘要:齿轮齿条升降机构是自升式平台的重要承载机构,在各种工作状态下起到支撑船体及相关设备的作用,并长时间承受重外载荷作用。
以三桩腿齿轮齿条升降式自升式平台为模型,从桩腿内力分析出发,研究齿轮齿条升降机构受力,从而为升降单元安全评价、寿命评估等提供支持。
关键词:自升式平台;升降单元;受力分析中图分类号:T E951 文献标识码:AForce Analysis of Pinion and Rack Jacking System of Three Legs Jack up PlatformFAN Dun qiu1,CU I Xi jun1,CAO Yu g uang2(1.D r illing T echnology I nstitute,S heng li Petr oleum Bureau,Dongy ing257017,China;2.College ofT rans p or t&Stor ag e and Civ il Engineering,China Univ er sity of Petr oleum,Do ngy ing257061,China)Abstract:The pinion and r ack jacking sy stem is the m ost im por tant bearing apparatus of the jack up platform.It has to suppor t the platfo rm itself,equipm ents o n it and external lo ads.T hus the jacking system bears heavy load for long time.In this paper,the m ost co mmo nly used three legs jack up platfo rm w as selected fo r analyzing the lo ad acted on the jacking system,by m eans of in ternal force of the leg s.Results o f the r esearch can be used fo r the safety evaluation and life pre diction of the jacking units.Key words:jack up platfo rm;jacking unit;fo rce analysis自升式钻井平台在经历半个多世纪的发展后,在工作水深、抗风暴能力、可变载荷、钻井能力和操作性能等方面取得了巨大进步[1 5]。
自升式钻井平台悬臂梁齿轮齿条驱动系统设计
s t r u c t u r e a n d t h e c e n t r e o f g r a v i t y o f t h e i n s t a l l a t i o n we i g h t o n t h e c a n t i l e v e r .T h e g e o me t r i c p a r a me t e r s o f t h e g e a r r a c k o f t h e c a n t i l e v e r b e a m s h o u l d b e c a l c u l a t e d wh e n d e s i g n i n g t h e l i n k a g e s t uc r t u r e b e t w e e n t h e c a n t i l e v e r b e a m a n d t h e g e a r r a c k a n d
Ke y Wo r d s :S e l f - e l e v a i t n g Dr i l l i n g P l a t f o r m Ca n il t e v e r Be a m Ge a r Ra c k S t r u c t u r a l De s i g n Dr i v e Co n t r o l
自升 式 钻 井 平 台 悬 臂 梁 齿 轮 齿 条 驱 动 系 统 设 计 术
口 王龙庭 口 徐兴平 口 徐长航 口 刘广斗
2 6 6 5 8 0
口
张
辛
中 国石 油 大 学 ( 华东 ) 机 电工 程 学 院 山东 青 岛
摘 要 : 以 某 自升 式 钻 井 平 台 为例 , 采用“ 电机+ 变速 箱+ 小传 动 轮 + 齿务” 方 式 驱 动 悬 臂 梁 移 动 。 通 过 悬 臂 梁 的 结 构 及 悬臂 梁上 的 设 备 质 心 确 定移 动 悬臂 梁所 需 的推 力 。 计 算 悬臂 梁齿 轮 齿 条 几 何 参 数 。 并设 计 悬臂 梁 与 齿 轮 齿 条 的 连 接 结 构
自升式海上钻井平台升降系统技术特点分析

压 马达, 可使 升降 系统 针对 不 同 的载荷 采用 不 同 的 速度 ,这 样 节 省 了平 台 升降 的时 间 ;③采 用 大 扭
矩 、低转 速 的液 压马达 可减小 减速箱 的传动 比,从
而减小其 尺寸和 造价 。 从 操 作方式及 故障 率来看 ,两种驱 动升降方 式
均 需设置集 中控 制 台和 桩边 控制 台,集 中控制 台 内
2 齿 轮齿 条 升 降系统 的设 备 组 成
自升式平 台的桩腿齿 条是 沿桩腿 圆筒 或玄杆铺升 降系统传
动装 置 的末端 ,整 个升 降系统 的动力 由电动机或液
压马 达输 出 ,通过联 轴器传 输到传 动装置 ,再 由传 动装置 传递给 小齿轮 ,最后通 过小齿 轮驱动齿 条作
翔
T ur … o n
(7 t 0) 1
c
一 条棠 茎
B 8 00 0N・ 以上 。 目前 国 内缺 乏这 种 大速 比减 速 0 0 m
机 构 的设 计制 造 经验 ,对 于其受 力 分析 、动 力学研 究 、振 动噪声 控 制 、弹性 啮合 原理 以及 载荷 分配 等
每座平 台典型 的 电动齿 轮齿条 式升 降系统 的主
齿 轮齿条 升降 的方 式 比较 多 。所 谓齿轮 齿条式 升降
系统就是 在平 台的每根齿 条上设 置几个小 齿轮 ,齿 条及 其对应 小齿轮 数量根 据平 台所 要求 的举升能 力
和平 台总体要 求加 以确定 。动力通 过桩边 马达驱动
直 线运 动 ,从 而带动桩 腿或平 台进行 升降作业 。对
l 圈 梁 ; 2 平 台 主 甲板 ; 3 顶 升 油 缸 ;4 升 降 室 顶 饭 ; 一 — 一 -
于一个 三根绗 架式桩腿 的 自升 式平 台来说 ,每一个 桩 腿 上都有 三 根玄杆 ,每根 玄杆 上 设有 两道 齿 条 , 每 道齿 条上有 上下 两个小 齿轮 与之 啮合 ( 图 3 , 见 ) 每一 对 啮合 齿轮及 其驱 动 、传 动装置构 成一个升 降 单元 ,一般 来讲 ,升降 系统 由数 个或数 十个升 降单
齿轮式升降机设计文档
齿轮式升降机设计说明书齿轮式升降机设计说明书1 目录设计任务书 (1)传动方案的拟定与分析 (2)传动方案简图 (2)电动机的选择与计算 (3)电动机类型与功率的选择 (3)电动机转速与型号的选择 (3)传动装置的运动以及动力参数的选择和计算 (4)传动比的分配 (5)传动装置的运动与动力参数计算 (6)传动零件的设计计算 (6)齿轮的设计 (7)齿轮的校核 (8)轴的设计计算 (9)轴的设计 (10)轴的校核 (10)键连接的选择以及计算 (11)键的设计 (12)键的校核 (16)滚动轴承的选择以及计算 (17)联轴器的选择 (18)润滑和密封方式的选择,润滑油和牌号的确定 (19)齿轮的润滑 (19)轴承的润滑 (23)箱体以及附件的结构设计和选择,以及装配,拆卸,安装时的注意事项 (25)设计小结 (30)小组分工 (31)参考资料 (32)2设计任务书通过电动机输出转矩,由中间环节的减速器来实现减速增力,最后通过链轮减速实现最终的转矩输出。
驱动负载上升与下降。
其中电动机输出咒语减速器采用联轴器相连,减速器输出轴与链轮,链轮与负载均采用联轴器相连。
3传动方案的拟定与分析动力由电动机提供,电动机选用Y 132M 2-6 型,额定功率5.5千瓦,同步转速1000 r/min ,满载转速960 r/min 。
系统的总传动比选定为36: 1 ,电动机轴外伸轴颈38mm ,轴外伸长度80 mm 。
高速及斜齿轮传动比为4:1,电动机输出轴通过联轴器与器相连。
低速级直齿轮传动比为 3 :1 ,通过联轴器与链轮相连。
链轮传动比为3:1,之后再通过联轴器与起重机滑轮相连。
最终升降机的速度为m/s ,升降机最大载荷为N 。
传动方案简图4 电动机的选择与计算电动机类型与功率的选择 根据升降机的最大载荷为 7000牛 , 平稳运行速度为 0.5 m/s ,载荷平稳,电源采用 三相交流电 380v 。
这里选用最常用的Y 系列 三相异步电动机 。
浅谈自升式海洋钻井平台齿轮条爬升与锁紧系统设计

浅谈自升式海洋钻井平台齿轮条爬升与锁紧系统设计摘要:自升式海洋钻井平台齿轮条爬升与锁紧系统是取得海洋中石油的设备装置中的关键组成部分,分析设计自升式海洋钻井平台齿轮齿条的升降装置与锁紧系统在海中作业的功能,在这个基础上根据现有情况对平台进行改善优化。
了解齿轮齿条爬升与紧锁系统的基本工作原理、自升式海洋钻井平台设计方向,为目前海中石油资源的拓展方向提供强大的基础机械能力。
关键词:自升式海洋钻井平台;齿轮条爬升;锁紧系统1.基本原理工作平台、桩腿、爬升系统与锁紧系统、控制装置、钻井装置(包括动力设备和起重设备)、以及生活区(包括直升飞机平台)这几个部分是自升式海洋钻井平台的主要组成部分。
目前,常用的平台为三桩腿自升式海洋钻井平台,其中的关键零件是位于三桩腿上的爬升系统和锁紧装置,这两者的设计性能优劣会对自升式海洋钻井平台的工作效率、开发石油成果等造成很大的影响,因而我们主要从这两个方面去考虑优化目前所使用的海洋作业机械。
电动机、齿轮齿条爬升结构、桩腿等几个部分构成自升式海洋钻井系统的爬升装置。
下面爬升系统的工作原理的解析:在电动机提供动力的情况下齿轮沿着齿条的运动,带动海洋钻井平台在桩腿上做缓慢爬升的运动,爬升到任何所需要到达的工作位置;然后锁紧系统通过锁紧齿条与桩腿齿条啮合进行锁紧,从而将甲板上重量和运行时的载荷转移到海底的平面,桩腿和平台的上升和下降都依赖于爬升系统而且在正常工作状态及遭遇天气严重巨变状态下支撑船体甲板及相关设备,它有很大的刚度和载重范围使得绝大部分的桩腿受压传至主弦管形成的各向轴向力达到最小程度,易于达到以降低水阻力来增加工作水深度,自升式钻井平台得以进入更深及海况更恶劣的海域工作。
当到达油井的规定位置以后我们可以利用爬升系统将船体升离水面从而为石油的提取做好准备,在提取石油结束后将船体缓慢降回海平面,再利用爬升系统将桩腿升起来使平台重新恢复成漂浮状态然后再拖拉到下一个油井位置开始作业。
海上自升式平台电动升降装置的研究

海上自升式电动升降装置的研究自升式钻井、采油平台及试油作业平台都有升降装置,它的主要功能是,当自升式平台移位时,通过升降装置把平台升离水面,为海上作业做好准备,作业结束后,再把平台降回水面,升起桩脚,使平台重新恢复成漂浮状态,准备拖航至下一个井位作业。
据1955年至今的统计,在所有海上移动式平台中,自升式平台的事故占全部平台事故损失数量的75%。
分析证明了,自升式平台的事故有一半以上发生在拖航和升降平台的时候。
所以对自升式平台升降系统的设计是至关重要的。
1 升降系统的机构形式以三角型平台胜利作业一号为例,如图1所示,在每个角上均有一根三角形桁架型插入式电动单齿条桩腿。
升降装置的传动部分为齿轮齿条传动方式,它主要由固定在桩腿上的齿条及固定在船体上的升降船传动装置—小齿轮、减速箱、电动机和制动器所组成。
每根桩脚有3条齿条各对应有3套升降船装置,而每套传动装置由一台电动机、一台制动器、一台减速器、一台减速箱和一个小齿轮组成。
这样,每根桩腿由3X3传动装置,全平台有3根桩脚,共有27套电动升降船传动系统。
每套升降装置电动机的伸出端装有电磁圆盘式制动器,制动器的制动转矩不小于电动机额定转矩的2倍。
2 升降系统的同步性每根桩脚腿的3X3台电动机和制动器由同一电源,同一组正、反转接触器供电给9台 并联电动机和制动器,以保证每根桩脚的3套齿轮条传动装置的同步性。
如果3X3台电动机或制动器,由于接触器动作失灵、主触点接触不良或电缆断芯均会 破坏同步性造成整个传动装置的损坏,严重的将会损坏齿轮、齿条。
3 工作过程载荷分析升降系统各工况负荷状况可根据图2分析如下:第一工况(0~t1):时间约10min 。
平台开始从浮动状态升船,到平台离开水面为止, 一个小齿轮的受力情况是从空载逐渐加大,最后达到额定负荷,这种工况电动机和小齿轮承受一样负荷,平均值为(890+710+800)/3=800kN 。
第二工况(t1~t2):时间约12min 。
R-550D自升式钻井平台升降系统的调试

建造与修理71GUANGDONG SHIPBUILDING 广东造船2021年第1期(总第176期) 作者简介:段谟簿 (1986-),男,工程师。
主要从事船舶平台调试、电装工作。
练博强 (1985-),男,工程师。
主要从事船舶、平台工法研究工作。
收稿日期:2019-10-15R-550D 自升式钻井平台升降系统的调试段谟簿,练博强,蓝巨滔(中船黄埔文冲船舶有限公司,广州510715)摘 要:R-550D 自升式钻井平台中采用电动齿轮式升降系统,该系统由多个升降模块构成,均匀分布在各桩腿两侧。
自升式平台在下水后,依靠其升降系统进行站桩作业,以方便码头舾装的进行。
因此,升降装置需在下水后进行联调试验,以确保其尽快达到可使用状态。
关键词:升降系统;组成;调试中图分类号:U674.38 文献标识码:AJacking System Commissioning Difficulties and Solutions of R-550DJack-up Drilling PlatformDUAN Mobu, LIAN Boqiang, LAN Jutao( CSSC Huangpu WenChong Shipbuilding Co., Ltd., Guangzhou 510715 )Abstract: The R-550D jack-up drilling platform adopts electric gear jacking system, which is composed of several jacking units and evenly distributed on both sides of each pile leg. After launching the jack up platform needs to rely on its jacking system for pile operation, so as to facilitate the outfitting at wharf. Therefore, the jacking device should be jointly commissioned after launching to ensure that it could be used as soon as possible. This paper discusses the commissioning difficulties and solutions of the jacking system of the R-550D jack-up drilling platform.Key words: Jacking System; Composition; Commissioning1 概述自升式钻井平台的升降系统,一般安装在自升式平台的桩腿和平台主体的交界位置,经由升降装置驱动平台主体作升、降运行,以满足海上平台相对高度作业需要。
海上自升式平台电动齿轮齿条升降装置的管理

桩腿及其升降 装置是自升式平台的关键 部件,其性能的
优劣直接影响 平台的安全和使用效果。据 统计,自升式平台
的事故有一半 以上发生在拖航和升降平台 的时候。因此,对 自升式平台升 降系统的合理设计及其维修 管理对保证平台的 工作至关重要。本文以中油海 5 号平台齿轮齿条式升降系统 为研究对象, 详细分析了电动升降装置的 管理要点,以求达 到装置的最优化运行。
② 轴承;③ 刹车盘;④ 花键轴; ⑥ 弹性挡圈;A 调整片; B 螺丝;C 螺丝;D 刹车盘;E 间隔装置 图 3 电磁制动器侧轴承
(2 )电磁制动器的维护 每套升降装置 电动机的伸出端装有电磁 圆盘式制动器, 制动器的制动转矩不小于电动机额定转矩的 2 倍,电磁制动 器结构如图 4 所示。 1 )维护方法 每年都必须对 刹车带的磨损和偏向进行 调整。气隙的测 量,可以通过 放置在平台顶部的检查孔来 进行测量。在新的 条件下,气隙的大小值的范围应该在 2~2 .5m m 之间。根据 制动器的操作 条件,气隙的大小值可以 取到 6 m m 。如果气 隙超过 6m m ,应 更换包括刹车带在内的刹 车盘。对于制动 器的清洗,可 通过打开位于平台低部的防 尘栓来清除刹车带 碎尘。清洗须保证在干燥的空气中进行吹扫。 2 )刹车盘的拆缷 参考图 5 :拆缷端盖,卸下刹车盘(包括其上的刹车带), 通过移出固定螺钉,拆缷 薄片。拆下电枢板 5 。清理残存的
摘 要:文中介绍了海上自升式钻井平台电动齿 轮齿条式升降系统的结构组成及其工作特点,详细分析了升降系统
的管理要点,对新造平台的管理维护保养具有一定的参考价值。
关键词:自升式平台;电动齿轮齿条;管理与维护
中图分类号:TE952
文献标识码:A
文章编号:1006- 7973(2011)01- 0095- 03
垂直升降的齿轮齿条结构

垂直升降的齿轮齿条结构垂直升降的齿轮齿条结构,这个名字听起来是不是有点复杂?其实不然,乍一听也许有点高深,但要是拆开来看看,你会发现它其实是个既简单又神奇的“玩意儿”。
想象一下,电梯里那些上下上下的动作,哎,没错,就是这个原理!它是一种能让物体垂直升降的机制,利用的是齿轮和齿条的相互配合。
看上去好像只是两个零件,但它们的结合能把不可能变成可能,神奇得很。
真的是“没有它不行,有它太棒了”!你看,齿轮就是那种常见的圆圆的铁片,上面满是小齿,看上去像个小小的“皇冠”。
齿条呢,就是一根平平的条状金属,上面也有齿,只不过不像齿轮那样圆圆的。
想象一下,齿条就像是个“齿轮的床”,齿轮则是“齿条的伙伴”。
两个配合得恰到好处,一上手就能产生动力,一拉一推,东西就能上下走了。
就是这么简单,听起来是不是有点小魔法的感觉?这个结构呢,应用范围超级广泛。
你在电梯里上下楼时,可能根本不会注意到它。
可你要是仔细一看,那根铁轨一样的东西,哎呀,可能就就是齿条呢。
而齿轮就藏在电梯的底部,默默地工作,把电梯推上推下,感觉好像是给你提供了一种神奇的力量。
就算你不懂原理,坐电梯的时候,心里也会有种“哇,太厉害了”的感觉。
这个时候,你的生活可真是离不开这对“齿轮夫妻”了!除了电梯,铁路上的升降平台也是这个结构。
特别是在一些火车站,或者是装卸货物的地方,那些能把大货物从低处升到高处的设备,背后可全是这些齿轮齿条的功劳。
它们可以让物体平稳、安全地垂直升降。
你别看它们是个小小的结构,在背后默默支持着整个运输系统。
没有它们,火车站那种巨大的货物平台恐怕就得手忙脚乱了。
你看,这就是个“力大无穷”的小帮手,真是有点“谋事在人,成事在天”的意思,所有的努力,最终都能看到成果。
有些人可能会觉得,这种结构只是一些简单的零件组成的,能有多大作用呢?其实不然,想想看,这个齿轮齿条结构所带来的精密度和稳定性,真的是一般机械结构比不了的。
它不仅能承受很大的负载,而且还能保证运动过程中的平稳性,简直就是“稳如老狗”。
一种自升式平台升降系统设计方法
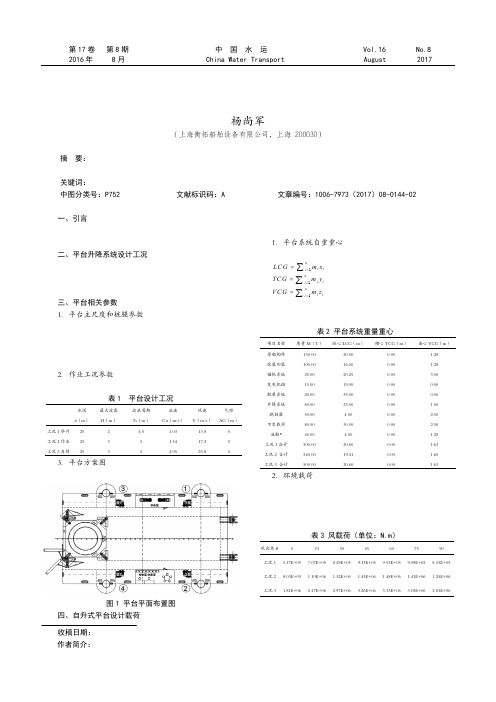
序和 Excel,提供一个简单易行的自升式平台升降系统设计方法。该方法可用于设计方案的快速成型,快速优化。 关键词:自升式平台;升降系统;稳桩作业平台 中图分类号:P752 一、引言 自升式平台稳定性好,适合搭载各种对作业精度要求比 较高的设备。 二、平台升降系统设计工况 通常升降系统设计要考虑举升、作业、自持三种工况。 本文以 XX 工程公司的稳桩平台为例,对升降系统的举升能 力和自持能力进行设计。 三、平台相关参数 1.平台主尺度和桩腿参数 工程公司的稳桩平台以 1/2 驳船作为平台主体,参数为 总长 34m,型宽 19.3m,型深 2.45m,吃水 1.5m,桩腿 直径 1.6m,桩腿厚度 30mm,桩腿纵向间距 19.5m,桩腿 横向间距 19.3m。 2.作业工况参数 平台作业海域为江苏响水。根据文献[2],工况如下: 表1
(2)
式中: Cs—风载荷形状系数; Ch—风载荷高度系数; S—
图 1 平台平面布置图 四、自升式平台设计载荷 收稿日期:2017-06-10 作者简介:杨尚军,上海衡拓船舶设备有限公司。
三峡工程齿轮齿条爬升式升船机设计分析

三峡工程齿轮齿条爬升式升船机设计分析摘要:目前三峡工程具有世界上规模最大、技术难度指标最高的升船机,它的升重量大且升程较高,它适应了当前三峡上下游通航水位变幅幅度大和水位变率快的特点。
本文所探讨的是三峡工程中的齿轮齿条爬升式升船机,该升船机具有设备构造复杂、施工精度要求高的基本特征,是中德跨国合资的综合技术产物,这里将主要围绕该升船机的总体布置设计、船厢机械设备及电气传动、控制系统设计展开论述。
关键词:齿轮齿条爬升式升船机;船厢机械设备;电气传动控制系统;设计1 前言目前三峡工程在三峡枢纽左岸布置了升船机工程,它是整个三峡工程的通航设施之一,能够与双线五级船闸联合运行,主要用来为客货轮或特种船舶提供快速过坝通道。
自2007年开始,三峡集团与德国“拉麦尔-K&K”所共同设计的联营体三峡工程齿轮齿条爬升式升船机正式投入使用。
它拥有3000t级别的过船规模,最大提升高度超过115m,上下游通航水位变幅分别为35m和12m,整体提升重量大且提升高度高,无论从技术难度还是运营规模目前都为世界最高水平,它象征着三峡工程建设已经进入了重要阶段。
2 齿轮齿条爬升式升船机的总体布局设计分析三峡工程中齿轮齿条爬升式升船机在总体布局上采用了上下游同时通过闸首建筑物挡水,促成承船厢的全平衡运行条件,满足最基本的挡水与过船需求。
在上下闸首部位还布置了船厢室段,它也是升船机的主体段。
另外,整个升船机系统构成还包括了最为重要的塔柱结构,它主要由承船厢、平衡重系统、顶部机房、电力拖动与控制检测建筑体及其它机械设备所共同组成。
在船厢的两侧位置对称布置了4个侧翼结构,它们所在位置相对于4个塔柱筒体的凹槽存在,在凹槽墙壁上海设置了驱动机构齿条与安全机构螺母柱,另外还包括了驱动机构、安全机构与侧翼结构,通过小齿轮齿条驱动运转,保证船厢箱体能够上下垂直升降。
船厢也与闸首相互对接,并通过锁定机构来锁定,该升船机配备了4套锁定机构,它们都设置在安全机构的上方位置,当船厢在升降过程中它的安全机构就会与锁定机构同步转动,保证船厢与闸首准确对接。
自升式平台齿轮齿条升降系统结构设计

自升式平台齿轮齿条升降系统结构设计
蒙占彬;曹宇光;张士华
【期刊名称】《机械设计与制造》
【年(卷),期】2013(000)011
【摘要】齿轮齿条式升降系统由于具有升降速度快、同步性好、便于维修保养等优点而广泛应用于自升式平台.由于国内目前尚不具备齿轮齿条升降系统的研制能力,因此自升式平台齿轮齿条升降系统均需要进口,但进口升降系统价格昂贵,供货周期长,修理维护困难等成为制约我国自升式平台发展的一个瓶颈.追踪国外最新技术,结合自升式平台使用工况设计了一套齿轮齿条升降系统,该系统主体由一个三级直齿圆柱齿轮减速箱和一套差动轮系组成,减速箱的输出齿轮通过与差动轮系太阳轮轴上一直齿圆柱齿轮啮合建立起二者之间联系.该升降系统具有两个输出轴,其一为差动轮系系杆,另一输出轴则通过齿轮与差动轮系外齿圈啮合.通过合理配齿实现两输出轴具有相同的转向和转速,最终形成一套一台电机驱动两输出齿轮的升降系统.【总页数】3页(P33-35)
【作者】蒙占彬;曹宇光;张士华
【作者单位】中国石油大学(华东),山东东营266580;胜利油田钻井工艺研究院,山东东营257017;中国石油大学(华东),山东东营266580;胜利油田钻井工艺研究院,山东东营257017
【正文语种】中文
【中图分类】TH16
【相关文献】
1.自升式平台升降系统齿轮齿条疲劳强度分析 [J], 吴勇;雍军;袁霄
2.自升式平台齿轮齿条升降系统受力分析 [J], 樊敦秋;崔希君;曹宇光
3.自升式平台电动齿轮齿条式升降系统逆功率分析 [J], 邱晗
4.自升式海洋平台齿轮齿条升降系统的研究 [J], 孙永泰
5.自升式海洋钻井平台升降系统齿轮齿条啮合接触分析 [J], 巴建彬;李士喜
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
况设计 了一套齿轮 齿条升降 系统 , 该系统主体由一 个三级直齿圆柱齿轮减速箱和一套差动轮 系组成 , 减速箱的输 出齿轮
通过与差动轮 系太阳轮轴上一直齿 圆柱齿轮啮合建立起二者之 间联 系。该升 降系统具有 两个输 出轴 , 其一为差动轮 系系 杆, 另一输 出轴则通过齿轮与差动轮 系外齿圈啮合。通过合理配齿 实现两输 出轴具有相同的转 向和转速 。 最终形成一套
s t u d y i n gt h e w o r k i n g c o n d i t on i s o f j a c k - u p p l t a f o r m s .T h e j a c k i g n s y s t e m m in a l y c o n s s i s t fU o t Ol e c h a n g e g e r a c a s e nd a a d i f e r e n t i a l ea g r t r a i r  ̄T ey h w e r e c o n n e c t e d b y t e h es m h i n g b e t w e e n t e h o u t p u t ea g r o ft h e t Ol e c h ng a e ea g r c se a nd a a s p u r
摘
要: 齿轮齿条式升降系统 由于具有升降速度快、 同步性好 、 便 于维修保养等优 点而广泛应用于 自 升式平 台。 由于国 内
目前 尚不具备齿轮 齿条升降 系统 的研 制能力,因此 自升式平 台齿轮 齿条升 降系统均需要进 口,但进 口升 降系统价格 昂
贵, 供货周期 长, 修理维护 困难等成为制约我 国自升 式平 台发展的一个瓶颈。追踪 国外最新技 术, 结合 自升式平 台使 用工
一
台电机 驱 动 两输 出齿轮 的升 降 系统 。
关键词 : 自升式平台; 齿轮齿条升降系统 ; 差动轮系 中图分类号 : r Hl 6 文献标识码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) l 1 - 0 0 3 3 — 0 3
St r u c t u r a l De s i g n o f t h e Ra c k a n d Pi n i o n J a c k i n g Sy s t e m o f J a c k - Up PI a t f 0 r ms
第1 1 期 2 0 1 3年 1 1月
机 械 设 计 与 制 造
Ma c h i n e r y De s i g n & Ma n u f a c t u r e 3 3
自升式平 台齿轮 齿条升 降 系统结构设 计
蒙占彬 . 一 , 曹宇光 , 张士华 :
( 1 . 中国石油大学( 华东 ) , 山东 东营 2 6 6 5 8 0 0 1 7 )
A b s t r a c t : T h e r a c k a n dp i n i o n j a c k i n g s y s t e m i s w i d e t y u s e d f o r j a c k - u p p l a t f o r m s f o r i t s a d v a n t a g e s o fh i g h j ck a i n g s p e e d , g o o d s y n c h r o n i c i t y , a n d c o n v e n i e n t t o b e m a i ta n i n e d a n d r e p i a r e d a n d S O O 1 K B e c a u s e C h i n a d o e s n ’ t p o s s e s s t h e c a p c o a f
j ck a — u p p l t a f o r m s i n C h i n a . He r e .a s e t fj o a c k i n g s y s e t m es d i g n e d b y p u r s u i n g t h e n e w e s t t e c h n o l o g y a b o a r d a n d
MENG Zha n -b i n ,CAO Yu- g u a n g ,ZHANG S h i —h u a
( 1 . C h i n a U n i v e r s i t y o f P e t r o l e u m,S h a n d o n g D o n g y i n g 2 5 7 0 6 1 , C h i n a ; 2 . D r i l l i n g T e c h n o l o g y R e s e a r c h I n s t i t u t e o f S h e n g l i O i l f i e l d , S h a n d o n g D o n yi g n g 2 5 7 0 1 7 , C h i n a )
es d i g n i n ga n d f a b r i c a t i n g r a c k a n d p i n i o n j a c k i n g s y s t e m, a l l j a c k i n g s y s t e m s ee n ed d h a v e t o b e i m p o a e  ̄T h e^ 劬 c o s t , l o n g