角度,坐标测量计算定律明细介绍
测量坐标方位角计算汇总
测量坐标方位角计算汇总在现代测量仪器和技术的支持下,测量坐标方位角变得更加准确和方便。
本文将介绍一些常用的测量坐标方位角的方法和技术,以及相关的计算方法和公式。
一、方位角的定义和表示方式方位角是指从参考方向(通常是北方向)开始,按照顺时针方向旋转到目标物体的方向所需要的角度。
在地理坐标系统中,通常使用度数来表示方位角。
例如,0度表示正北方向,90度表示正东方向,180度表示正南方向,270度表示正西方向。
方位角通常用数字表示,也可以用度分秒来表示。
度分秒是一种用时分秒来度量角度的表示方法。
例如,45度可以表示为45°,也可以表示为45°00’00’’。
二、测量坐标方位角的方法1.罗盘法:罗盘法是一种使用磁罗盘测量方位角的方法。
该方法利用地球的磁场方向作为参考,通过测量磁罗盘的指针指向来确定目标物体的方位角。
罗盘法的精度通常受到地球磁场的影响,需要进行磁偏角的校正。
2.GPS测量法:全球定位系统(GPS)是一种使用卫星信号测量位置和方向的技术。
通过接收多个卫星信号并计算其相对位置,可以确定接收器的位置和方位角。
GPS测量法具有高精度和实时性的优势,广泛应用于地理测量和导航领域。
3.光电测量法:光电测量法利用光线来测量目标物体的方位角。
该方法通过测量光线从光源到目标物体的传播方向和角度来确定方位角。
光电测量法通常需要专用的测量仪器和设备,如光电传感器和激光测距仪。
三、测量坐标方位角的计算方法和公式1.方位角的计算可以根据物体在地理坐标系统中的坐标值进行计算。
假设目标物体的坐标为(X1,Y1),参考点的坐标为(X0,Y0)。
方位角的计算公式如下:方位角 = atan2(Y1 - Y0, X1 - X0)其中,atan2函数是反正切函数,可以通过计算两点之间的纬度差和经度差得到方位角。
2.方位角的计算还可以根据目标物体在地图上的距离和方向进行计算。
假设目标物体与参考点的距离为D,目标物体相对于参考点的方向为A。
计算坐标与坐标方位角的基本公式

二 计算坐标与坐标方位角的基本公式控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的.下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式.一、坐标正算和坐标反算公式1.坐标正算根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。
如图5—5所示,已知A 点的坐标为A x 、A y ,A 到B 的边长和坐标方位角分别为AB S 和AB α,则待定点B 的坐标为AB A B ABA B y y y x x x ∆+=∆+= }(5—1) 式中 AB x ∆ 、AB y ∆——坐标增量。
由图5—5可知AB AB AB AB AB AB S y S x ααsin cos =∆=∆ }(5—2)式中 AB S ——水平边长; AB α-—坐标方位角.将式(5-2)代入式(5—1),则有AB AB A B ABAB A B S y y S x x ααsin cos +=+= }(5—3)当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角AB α为已知时,就可以用上述公式计算出待定点B 的坐标。
式(5—2)是计算坐标增量的基本公式,式(5-3)是计算坐标的基本公式,称为坐标正算公式.从图5—5可以看出AB x ∆是边长AB S 在x 轴上的投影长度,AB y ∆是边长AB S 在y 轴上的投影长度,边长是有向线段,是在实地由A 量到B 得到的正值。
而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种情况,其正负符号取决于坐标方位角所在的象限,如图5-6所示。
从式(5—2)知,由于三角函数值的正负决定了坐标增量的正负,其符号归纳成表5—3.图5-5 坐标计算图5—6 坐标增量符号表5—3 坐标增量符号表坐标方位角(°)所在象限坐标增量的正负号⊿x ⊿y0~9090~180180~270270~ⅠⅡⅢⅣ+--+++--例1 已知A 点坐标A x =100。
测量坐标方位角公式
测量坐标方位角公式引言坐标方位角是地理测量中常用的一个概念,用于描述一个点相对于参考方向的角度。
测量坐标方位角是确定一个点相对于某一基准点的相对位置的重要步骤。
本文将介绍测量坐标方位角的公式和计算方法。
坐标方位角的定义坐标方位角可以理解为从参考方向逆时针旋转的角度,以度数或弧度表示。
参考方向通常以正北或正东为基准,具体取决于实际应用场景。
方位角的取值范围为0°至360°或0至2π弧度。
坐标方位角的计算要计算一个点相对于参考方向的方位角,需要知道两者之间的水平方向角和距离。
水平方向角是指从参考方向到目标点方向的角度。
公式下面是计算坐标方位角的公式:方位角 = atan2(y2 - y1, x2 - x1) * 180 / π其中,(x1, y1)是参考点的坐标,(x2, y2)是目标点的坐标,atan2是求反正切的函数,π是数学常量π。
计算步骤1.确定参考点和目标点的坐标(x1, y1)和(x2, y2);2.计算水平方向角,即参考点指向目标点的角度。
可以借助数学库或计算工具来计算反正切;3.使用公式计算坐标方位角,将水平方向角转换为度数。
示例假设有一个参考点A的坐标为(2, 3),目标点B的坐标为(5, 7)。
我们来计算点B相对于点A的坐标方位角。
1.点A的坐标为(2, 3),点B的坐标为(5, 7);2.计算水平方向角:atan2(7 - 3, 5 - 2) = atan2(4, 3)≈ 51.34°;3.使用公式计算坐标方位角:51.34°。
因此,点B相对于点A的坐标方位角约为51.34°。
结论测量坐标方位角是地理测量中的一项重要任务。
通过计算水平方向角和距离,我们可以轻松计算出点相对于参考方向的方位角。
在实际的地理测量和导航应用中,坐标方位角的计算是不可或缺的步骤,能够帮助我们准确确定物体或位置相对于参考点的方向关系。
以上是测量坐标方位角的公式和计算方法的介绍,希望对您有所帮助。
关于坐标与坐标方位角的计算
关于坐标与坐标方位角的计算坐标与坐标方位角是地理学中经常涉及的两个概念。
坐标一般指的是其中一点在地球表面的位置,而坐标方位角是指其中一点相对于参考点的方向。
在地理信息系统、导航系统以及测量、航海等领域中,坐标与坐标方位角的计算是非常重要的。
首先,我们先来了解一下坐标的概念和表示方法。
坐标一般是由经度和纬度两个数值组成。
经度是指地球上其中一点与本初子午线的夹角,范围是从0°到180°东经或西经。
纬度是指地球上其中一点与赤道的夹角,范围是从0°到90°北纬或南纬。
经度和纬度的单位都是度(°)。
在计算坐标时,我们需要使用测量仪器(如GPS)来测定其中一点的经度和纬度数值。
这些数值可以直接使用,也可以根据仪器的输出进行转换。
例如,GPS通常会输出以度、分、秒或以十进制度表示的经纬度数值,我们可以根据需要进行转换。
将经度和纬度数值表示为十进制度,方便计算和比较。
接下来,我们来讨论坐标方位角的计算。
坐标方位角是指一个点相对于参考点的方向,也可以理解为一个点与参考点之间连线与正北方向之间的夹角。
坐标方位角的计算通常使用数学中的三角函数来实现。
首先,我们需要确定一个正北方向。
在地球表面上,通常使用地心纬度方向作为正北方向。
地心纬度是指与参考椭球体表面垂直的线所作的纬度,在地球上大致是从南向北逐渐增加的方向。
因此,我们可以将地心纬度方向作为正北方向。
其次,我们需要使用球面三角学中的公式来计算坐标方位角。
球面三角学是关于球面上的三角形的一门数学学科,可以用来解决地理测量和导航等问题。
在坐标方位角的计算中,主要使用到的公式有:1.余弦定理:可以用来计算一个球面三角形的边长,即两点之间的距离。
2.正弦定理:可以用来计算一个球面三角形的角度。
通过这些公式,我们可以计算出点A与参考点B之间的距离以及夹角。
然后,根据夹角的正负和大小,我们可以确定点A相对于参考点B的方向角。
需要注意的是,坐标方位角的计算要考虑地球的曲率。
坐标测量角度及方位角计算
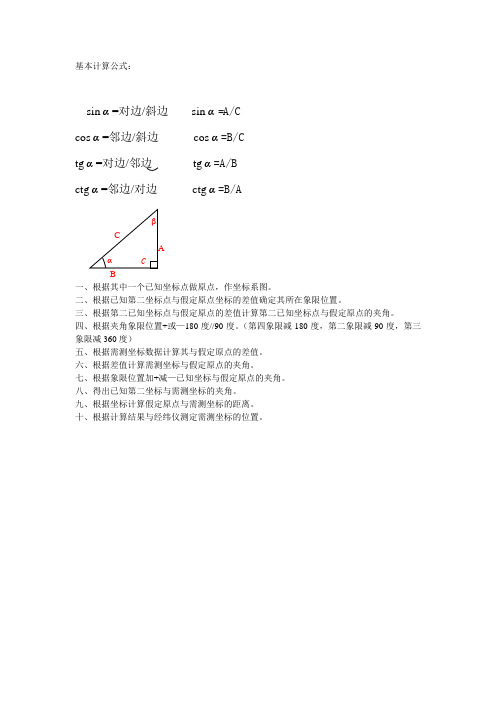
基本计算公式:
sinα=对边/斜边sinα=A/C
cosα=邻边/斜边cosα=B/C
tgα=对边/邻边tgα=A/B
ctgα=邻边/对边ctgα=B/A
B
一、根据其中一个已知坐标点做原点,作坐标系图。
二、根据已知第二坐标点与假定原点坐标的差值确定其所在象限位置。
三、根据第二已知坐标点与假定原点的差值计算第二已知坐标点与假定原点的夹角。
四、根据夹角象限位置+或—180度//90度。
(第四象限减180度,第二象限减90度,第三象限减360度)
五、根据需测坐标数据计算其与假定原点的差值。
六、根据差值计算需测坐标与假定原点的夹角。
七、根据象限位置加+减—已知坐标与假定原点的夹角。
八、得出已知第二坐标与需测坐标的夹角。
九、根据坐标计算假定原点与需测坐标的距离。
十、根据计算结果与经纬仪测定需测坐标的位置。
测量坐标方位角计算
测量坐标方位角计算坐标方位角是指一个点相对于原点的方向角度。
测量坐标方位角是非常重要的,特别是在地理测量、导航以及机器人控制等领域。
在这篇文章中,我将解释测量坐标方位角的原理和方法,并提供一些实际应用的示例。
首先,坐标方位角是以正北方向为参考的,顺时针方向测量。
通常用一个角度值表示,范围从0度到360度。
0度表示正北方向,90度表示正东方向,180度表示正南方向,270度表示正西方向。
方位角 = arctan(y / x)其中,y是点相对于原点在y轴上的坐标值,x是点相对于原点在x轴上的坐标值,arctan是反正切函数。
这个公式的推导过程比较简单。
假设原点为O,目标点为A,OA的长度为r,目标点的坐标为(x, y)。
那么,根据三角函数的定义,tan(方位角)等于直角三角形的对边长度y除以临边长度x,即tan(方位角) = y / x。
而反正切函数就是这个比值的反函数,即arctan(y / x)。
在实际应用中,可以使用计算机程序来计算坐标方位角。
许多编程语言和软件包都提供了计算三角函数的函数或方法。
比如,在Python中,可以使用math库中的atan2函数来计算坐标方位角。
这个函数接受两个参数,y和x,然后返回坐标方位角的弧度值。
要转换为角度值,可以再将弧度值乘以180并除以π,即angle = atan2(y, x) * 180 / π。
除了使用三角函数,还可以使用向量运算来计算坐标方位角。
假设有两个向量,一个是原点指向目标点的向量A,一个是x轴的单位向量B。
那么,两个向量的夹角就是坐标方位角。
具体而言,可以使用以下公式来计算坐标方位角:方位角= arccos(A · B / (,A,× ,B,))其中,A · B表示向量A和向量B的内积,A,和,B,分别表示向量A和向量B的长度,arccos是反余弦函数。
当然,以上只是理论上的计算方法,实际上还需考虑一些附加因素。
角度计算和坐标计算
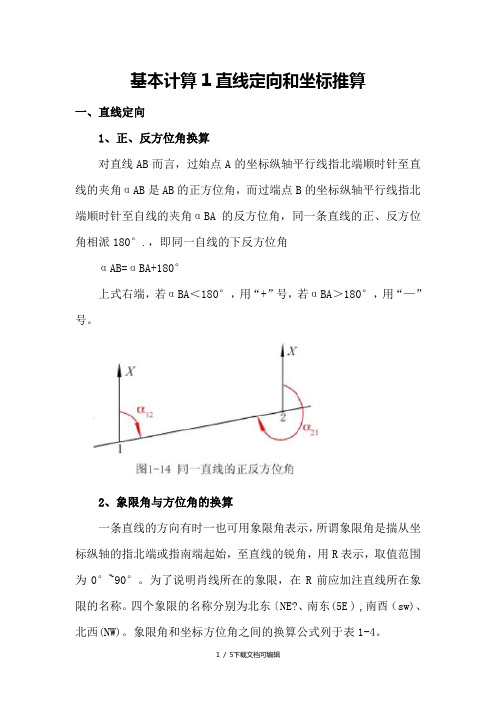
基本计算1直线定向和坐标推算一、直线定向1、正、反方位角换算对直线AB而言,过始点A的坐标纵轴平行线指北端顺时针至直线的夹角αAB是AB的正方位角,而过端点B的坐标纵轴平行线指北端顺时针至自线的夹角αBA的反方位角,同一条直线的正、反方位角相派180°.,即同一自线的下反方位角αAB=αBA+180°上式右端,若αBA<180°,用“+”号,若αBA>180°,用“—”号。
2、象限角与方位角的换算一条直线的方向有时一也可用象限角表示,所谓象限角是揣从坐标纵轴的指北端或指南端起始,至直线的锐角,用R表示,取值范围为0°~90°。
为了说明肖线所在的象限,在R前应加注直线所在象限的名称。
四个象限的名称分别为北东〔NE?、南东(5E ) ,南酉(sw)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
3、坐标方位角的推算测量工作中一般不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地而有相邻的A、B、C三点,连成折线(图1-17),已知AB边的方位角αAB。
,又测定了AB和BC之间的水平角β,求BC边的方位角气αBC,即是相邻边坐标方位角的推算。
水平角β又有左、右之分,前进方向左侧的水平角为β左,前进方向右侧的水平角β右。
设三点相关位置如图1-I7(c)所示,应有αBC=αAB+β左+180°(1一14)设三点相关位置如图1-I7沪)所不,应有αBC=αAB+β左+180°=αAB+β-180°(1一15)若按折线前进方向将AB视为后边,BC边视为前边,综合上二式即得相邻边坐标方位角推算的通式:α前=α后+β左±180°(1一16)显然,如果测定的是AB和BC方向之间的前进方向右侧水平角β右,因为有β左=360°-β右。
代入上式即得通式:α前=α后-β右±180°上二式右端,若前两项计算结果<180°,180°前而用“十”号,否则180°前而用“一”号。
测量坐标计算公式讲解

测量坐标计算公式讲解在测量和制图领域,测量坐标计算公式是非常重要的工具。
它们用于确定物体在二维或三维空间中的位置,并进行精确的测量和定位。
本文将介绍一些常用的测量坐标计算公式,并讲解其原理和应用。
一、二维坐标计算1. 直角坐标系直角坐标系是最常用的坐标系之一。
在直角坐标系中,通过给定的两个坐标轴(通常是x轴和y轴),我们可以准确地确定点的位置。
对于二维平面上的点P(x, y),我们可以使用以下公式计算其坐标:x = x1 + Δxy = y1 + Δy其中,x1和y1表示已知点的坐标,Δx和Δy分别表示点P到已知点的水平和垂直距离。
2. 极坐标系极坐标系是另一种常用的坐标系,它使用极径和极角来确定点的位置。
极坐标系常用于描述圆形或其他具有对称性的图形。
对于极坐标系中的点P(r, θ),我们可以使用以下公式计算其坐标:x = r * cos(θ)y = r * sin(θ)其中,r表示点P到原点的距离,θ表示点P与正x轴之间的夹角。
二、三维坐标计算1. 笛卡尔坐标系笛卡尔坐标系是三维空间中最常用的坐标系之一。
它使用x、y和z轴来确定点的位置。
对于三维空间中的点P(x, y, z),我们可以使用以下公式计算其坐标:x = x1 + Δxy = y1 + Δyz = z1 + Δz其中,x1、y1和z1表示已知点的坐标,Δx、Δy和Δz分别表示点P到已知点的水平、垂直和深度距离。
2. 球坐标系球坐标系也是一种常用的三维坐标系,它使用球半径、极角和方位角来确定点的位置。
球坐标系常用于描述球形物体或球面上的点。
对于球坐标系中的点P(ρ, θ, φ),我们可以使用以下公式计算其坐标:x = ρ * sin(θ) * cos(φ)y = ρ * sin(θ) * sin(φ)z = ρ * cos(θ)其中,ρ表示点P到原点的距离,θ表示点P与正z轴之间的夹角,φ表示点P在x-y平面上的投影与正x轴之间的夹角。
工程测量中坐标方位角计算公式

工程测量中坐标方位角计算公式在工程测量中,坐标方位角是指一个点相对于参考方向的角度。
它是测量中常用的一个重要参数,用于确定物体或地点的位置和方向。
坐标方位角的计算公式主要基于三角函数的运算和几何原理,下面将详细介绍它的计算方法。
我们需要明确坐标方位角的定义。
在工程测量中,通常以正北方向为参考方向,以逆时针方向为正方向,来确定一个点的方位角。
方位角的范围是0°到360°,其中0°表示正北方向,90°表示正东方向,180°表示正南方向,270°表示正西方向,360°又回到正北方向。
对于任意一个点,我们可以通过计算该点相对于参考方向的角度来确定它的方位角。
具体的计算公式如下:方位角 = arctan((Y - Y0) / (X - X0))其中,X0和Y0表示参考点的坐标,X和Y表示待测点的坐标。
这个公式基于斜率的概念,通过计算两点之间的斜率来确定方位角。
需要注意的是,由于计算中使用了反正切函数arctan,所以计算结果的范围是-90°到90°,即仅限于第一象限和第四象限。
为了得到完整的方位角范围,我们需要进行一些额外的处理。
在计算公式中,我们可以根据X和X0的大小关系,以及Y和Y0的大小关系来确定方位角的象限。
具体的处理方法如下:如果X > X0且Y > Y0,那么方位角为计算结果;如果X < X0,那么方位角为180°加上计算结果;如果X > X0且Y < Y0,那么方位角为360°加上计算结果;如果X = X0且Y > Y0,那么方位角为90°;如果X = X0且Y < Y0,那么方位角为270°;如果X = X0且Y = Y0,那么方位角没有定义。
通过这些处理,我们可以得到完整的方位角范围。
在实际的工程测量中,坐标方位角的计算非常重要。
测量学坐标计算公式表

测量学坐标计算公式表在测量学中,坐标计算是一项基础而重要的任务。
通过测量物体的位置和形状,我们可以获得其准确的坐标信息,从而帮助我们进行进一步的分析和应用。
本文将介绍一些常用的测量学坐标计算公式,以帮助读者更好地理解和应用这些公式。
1. 二维坐标计算公式1.1. 距离公式测量学中最基础的公式之一是计算两点之间的距离。
对于平面坐标系中的两个点A(x1, y1)和B(x2, y2),它们之间的距离d可以通过以下公式计算:d = sqrt((x2 - x1)^2 + (y2 - y1)^2)1.2. 中点公式中点公式用于计算两个点的中点坐标。
对于平面坐标系中的两个点A(x1, y1)和B(x2, y2),它们的中点坐标M(x, y)可以通过以下公式计算:x = (x1 + x2) / 2y = (y1 + y2) / 21.3. 角度公式计算两条线段之间的夹角也是测量学中常见的任务。
对于平面坐标系中的两条线段AB和AC,它们之间的夹角θ可以通过以下公式计算:θ = arccos((AB · AC) / (|AB| * |AC|))其中,AB · AC表示向量的点乘,|AB|和|AC|表示向量的模。
2. 三维坐标计算公式在三维空间中,坐标计算稍微复杂一些。
下面介绍一些常见的三维坐标计算公式。
2.1. 距离公式与二维情况类似,计算三维空间中两点之间的距离也是一项基本的测量任务。
对于坐标系中的两点A(x1, y1, z1)和B(x2, y2, z2),它们之间的距离d可以通过以下公式计算:d = sqrt((x2 - x1)^2 + (y2 - y1)^2 + (z2 - z1)^2)2.2. 中点公式与二维情况类似,计算三维空间中两个点的中点也是常见的测量任务。
对于坐标系中的两个点A(x1, y1, z1)和B(x2, y2, z2),它们的中点坐标M(x, y, z)可以通过以下公式计算:x = (x1 + x2) / 2y = (y1 + y2) / 2z = (z1 + z2) / 22.3. 体积公式测量物体的体积是一项常见的任务。
经纬仪测量计算方式

经纬仪测量计算方式
象限角与方位角换算关系
坐标增量符号表
计算夹角是左、右盘的前视减去后视两数相加在除以二就等于这个夹角。
计算分五个步骤:
1:角度闭合差的计算
2:坐标方位角推算
由已知方位角加上所测夹角在减去180°等于下一个方位角,如果不够减就加上180°就等于下一个方位角。
3:坐标增量计算
△X的增量=cosa(方位角)×平距。
在计算时要主意方位角的象限在增量表那一象限,已象限确定增量正负符号。
△y的增量=sina(方位角)×平距。
在计算时要主意方位角的象限在增量表那一象限,已象限确定增量正负符号。
4:由上一个X、Y坐标加或者减去坐标增量就等于这一个坐标。
高程计算
1:在井下测量点布置在顶板上时h=sina一i+v
就是这站到那站的高差等于斜距乘以sin乘以竖直角减去仪器高加上标占高。
2:在井下测量点布置在底板上时h=sina+i-v
就是这站到那站的高差等于斜距乘以sin乘以竖直角加上仪器高减去标占高。
3、角度输入,23d11分按Enter左边的上两点下一点键,秒先按shift在按Enter左边的上两点下一点键。
测量学中坐标方位角怎么算

测量学中坐标方位角怎么算坐标方位角是测量学中一项重要的测量参数。
它用于描述一个点或物体相对于参考点的方位位置。
在测量学中,坐标方位角的计算方法有很多种,下面将介绍其中的一种常用方法。
1. 什么是坐标方位角?坐标方位角是指一个点相对于参考点的方向角度。
通常情况下,参考点被视为坐标系原点,点的方位角是从参考点出发,逆时针旋转一定角度后到达目标点的角度。
2. 坐标方位角的计算方法坐标方位角可以使用三角函数来计算。
下面介绍一种常用的计算方法。
首先,确定参考点和目标点的坐标值。
假设参考点的坐标为 (x1, y1),目标点的坐标为 (x2, y2)。
接下来,计算两点间的水平距离 dx 和垂直距离 dy。
可以使用公式 dx = x2 - x1 和 dy = y2 - y1 来计算。
然后,利用反正切函数 atan2(dy, dx) 计算坐标方位角。
这个函数可以直接得出坐标方位角的值。
最后,将计算得到的坐标方位角进行标准化。
通常情况下,坐标方位角的取值范围是从0°到360°。
如果结果小于0°,则加上360°,如果结果大于360°,则减去360°。
下面是具体的计算过程:dx = x2 - x1dy = y2 - y1angle = atan2(dy, dx)if angle < 0:angle += 360elif angle > 360:angle -= 3603. 坐标方位角的应用坐标方位角广泛应用于测量学中的各个领域,包括地理测量、测量工程和导航定位,以及其他需要描述方位关系的领域。
在地理测量中,坐标方位角用于确定地理位置的方向关系。
比如,通过测量两个地理位置的坐标方位角,可以确定它们之间的方向关系,例如东西方向、南北方向等。
在测量工程中,坐标方位角可以用于描述建筑物或工程物体的方位关系。
通过测量目标点相对于一个参考点的坐标方位角,可以确定目标物体相对于参考点的方向角度。
测量学中坐标方位角计算公式
测量学中坐标方位角计算公式在测量学中,坐标方位角是用于描述目标物体或点在水平坐标系中的方向的数值。
坐标方位角是指从北方向顺时针旋转到目标点所需的角度。
在实际的测量工作中,计算坐标方位角是非常重要的,它可以帮助测量员准确地确定目标点在地图上的位置。
计算公式计算坐标方位角的主要公式是使用三角函数来实现的。
具体的计算公式如下:方位角 = arctan((Y2 - Y1) / (X2 - X1))在上述公式中,X1和Y1表示起点的水平坐标值,X2和Y2表示终点的水平坐标值。
arctan表示反正切函数,它可以将斜率转化为角度值。
通过使用这个计算公式,我们可以得到起点和终点之间的坐标方位角。
需要注意的是,上述公式仅适用于计算水平平面上的坐标方位角。
如果需要在垂直平面上计算坐标方位角,我们还需要考虑高程的影响。
在这种情况下,计算公式会稍有不同,需要引入高程差的概念。
示例为了更好地理解坐标方位角的计算过程,我们可以通过一个示例来说明。
假设我们有两个点A和B,它们的水平坐标分别为:点A:(X1, Y1) = (100, 200)点B:(X2, Y2) = (150, 280)现在我们来计算点A和点B之间的坐标方位角。
首先,我们将点A和点B的坐标值代入计算公式中:方位角 = arctan((280 - 200) / (150 - 100))接下来,我们计算分子和分母的差值:方位角 = arctan(80 / 50)然后,我们计算这两个差值的比值:方位角 = arctan(1.6)最后,使用反正切函数来计算坐标方位角的数值:方位角≈ 56.31°所以,根据计算结果,点A和点B之间的坐标方位角约为56.31°。
结论测量学中的坐标方位角是用于描述目标物体或点在水平坐标系中方向的数值。
通过使用三角函数计算公式,我们可以准确地确定起点和终点之间的坐标方位角。
在计算时需要注意坐标值的顺序和差值的计算方法。
通过实际的计算示例,我们可以更好地理解和应用坐标方位角的计算公式。
坐标及方位角计算

坐标及方位角计算1.坐标计算:坐标通常使用经度和纬度来表示。
经度是指东西方向上的角度,纬度是指南北方向上的角度。
首先,我们需要确定一个参考点作为原点。
通常使用地球上的一些特定位置作为参考点,比如本初子午线(0°经度)和赤道(0°纬度)交汇处。
接下来,我们可以使用测量仪器(如GPS接收器)或地图上的标记点来确定我们要计算的点的经度和纬度。
然后,根据参考点的经纬度和所测点的相对位置,可以计算得到所测点的经纬度。
例如,假设参考点的经度为120°,纬度为30°,我们测量得到特定点与参考点的相对位置为10°以东,20°以南。
那么该点的经度就是120°+10°=130°,纬度就是30°-20°=10°。
需要注意的是,在计算坐标时,经度通常是由0°到180°(东经为正,西经为负),纬度通常是由0°到90°(北纬为正,南纬为负)。
2.方位角计算:方位角是指从一个点沿着大圆线(地球表面上的最短路径)到达另一个点的角度。
方位角通常用度数或方向(如北、东、南、西)来表示。
计算方位角的方法因地理坐标系的选择而异。
最常见的地理坐标系是大圆坐标系。
在大圆坐标系中,方位角可以根据两点的经纬度计算得到。
具体计算方法如下:-首先,将两点的经纬度转换为弧度表示。
经度的转换公式是经度(弧度)=经度(度数)×π/180,纬度的转换公式也是类似的。
-然后,使用以下公式计算方位角:方位角= atan2(sin(Δλ) * cos(φ₂), cos(φ₁) * sin(φ₂) -sin(φ₁) * cos(φ₂) * cos(Δλ))其中,Δλ表示两点经度的差值,φ₁和φ₂分别表示两点的纬度。
例如,假设我们要计算从点A(经度120°,纬度30°)到点B(经度130°,纬度40°)的方位角。
角度坐标测量计算公式细则
角度坐标测量计算公式细则文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)计算细则1、坐标计算:X1=X+Dcosα,Y1=Y+Dsinα。
式中 Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y2-y1)/(x2-x1)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y2-y1)+(x2-x1),1)、当y2-y1>0,x2-x1>0时;α=arctan(y2-y1)/(x2-x1)。
2)、当y2-y1<0,x2-x1>0时;α=360°+arctan(y2-y1)/(x2-x1)。
3)、当x2-x1<0时;α=180°+arctan(y2-y1)/(x2-x1)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y2-y1)/(x2-x1)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示)1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:Xab=Sab×COSαab 则有Xb=Xa+XabYab=Sab×SINαab Yb=Ya+Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
掌握测绘技术中的角度测量和方位角计算方法

掌握测绘技术中的角度测量和方位角计算方法角度测量和方位角计算是测绘技术中非常重要的一部分,它们在地理测量、工程测量等领域有着广泛的应用。
本文将介绍角度测量和方位角计算的基本原理和方法,以帮助读者更好地掌握这些技术。
一、角度测量在测量中,角度是指两条射线或两条线段之间的夹角大小,常用度(°)来表示。
角度测量的基本原理是利用测量仪器测量出射线或线段的长度,然后通过计算得出角度的大小。
角度测量有多种方法,其中最常用的方法是使用经纬仪。
经纬仪是一种测角仪器,它通过测量目标点与基准点之间的视线方向角度来确定目标点的位置。
使用经纬仪进行角度测量时,需要在基准点设置方向角为零的参考线,然后将经纬仪对准目标点,通过观察经纬仪上的刻度盘或读数窗口,测量出目标点与参考线之间的夹角。
这样就可以得到目标点的角度位置。
除了经纬仪,还有一些其他常用的角度测量仪器,如全站仪、自动水平仪等。
它们都有各自的特点和适用范围,在实际应用中可以根据需要选择合适的仪器进行角度测量。
二、方位角计算方位角是指某一物体或地点相对于参考方向的角度,也称为方位角度。
方位角计算常用的方法有两种:正算和反算。
正算是指已知起点和终点的坐标,通过计算求得起点指向终点的方位角。
正算的数学原理是根据坐标差值计算方位角的正切值,再通过反三角函数得到方位角的大小。
反算是指已知起点和方位角,通过计算求得终点的坐标。
反算的数学原理是根据起点坐标和距离,通过三角函数计算出终点的坐标。
方位角计算在工程测量、导航定位等领域有着广泛的应用。
例如,在土木工程中,方位角可以用来确定管线的走向;在航海导航中,方位角可以用来确定飞行器或船只相对于参考方向的位置。
三、测绘技术的应用测绘技术作为一门应用广泛的技术学科,广泛应用于土地管理、城市规划、资源调查等领域。
通过测绘技术,可以获取地面信息,并将其表达为地图、图纸等形式,为社会经济的发展提供基础数据和信息支持。
角度测量和方位角计算是测绘技术中重要的环节和工具,它们为测绘工作提供了重要的基础数据。
测量坐标方位角怎么算
测量坐标方位角怎么算在测量领域中,坐标方位角是一种用来表示物体相对于某一基准方向的角度。
它在地理测量、天文测量以及其他许多领域中都有重要的应用。
测量坐标方位角可以帮助我们准确定位物体在空间中的位置。
本文将简要介绍测量坐标方位角的计算方法。
1. 坐标方位角的定义坐标方位角是从基准方向逆时针旋转的角度,以度(°)为单位。
在测量中,我们通常使用北方作为基准方向,将其定义为0°或360°。
其他方向相对于北方的角度从0°到360°之间进行测量。
2. 坐标系的选择在计算坐标方位角之前,我们需要选择适当的坐标系。
常用的坐标系包括直角坐标系和极坐标系。
直角坐标系使用直角坐标轴(x、y、z轴)来表示物体的位置,而极坐标系则使用径向和角度来表示。
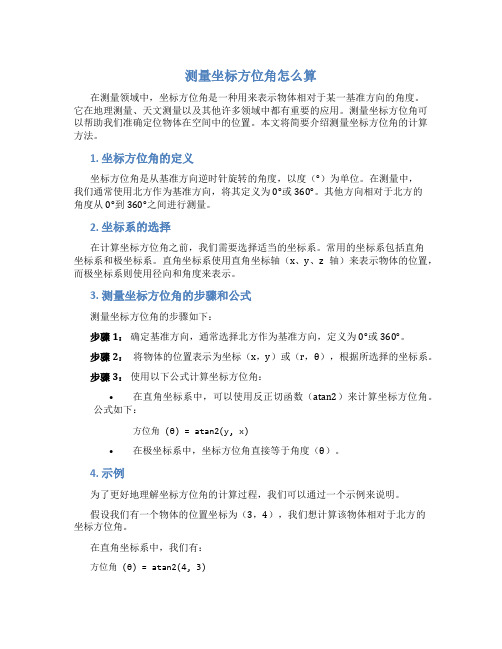
3. 测量坐标方位角的步骤和公式测量坐标方位角的步骤如下:步骤1:确定基准方向,通常选择北方作为基准方向,定义为0°或360°。
步骤2:将物体的位置表示为坐标(x,y)或(r,θ),根据所选择的坐标系。
步骤3:使用以下公式计算坐标方位角:•在直角坐标系中,可以使用反正切函数(atan2)来计算坐标方位角。
公式如下:方位角(θ) = atan2(y, x)•在极坐标系中,坐标方位角直接等于角度(θ)。
4. 示例为了更好地理解坐标方位角的计算过程,我们可以通过一个示例来说明。
假设我们有一个物体的位置坐标为(3,4),我们想计算该物体相对于北方的坐标方位角。
在直角坐标系中,我们有:方位角(θ) = atan2(4, 3)根据计算得到的结果,θ的值约为53.13°。
5. 总结测量坐标方位角是一种常见的测量技术,可以帮助我们准确描述物体在空间中的位置。
通过选择适当的坐标系,并运用相应的公式,我们可以计算出物体相对于基准方向的角度。
这种技术在地理测量、天文测量等领域有着广泛的应用。
希望本文对于理解测量坐标方位角的计算方法有所帮助,并能在相关测量工作中起到指导作用。
测量坐标方位角计算公式是什么
测量坐标方位角计算公式是什么引言在测量和导航领域中,确定两个点之间的方位角(也称为方向角或航向角)是一项重要的任务。
方位角定义为从一个参考点到目标点的方向,通常以北方向为参考。
测量坐标方位角是一种基本的导航技术,广泛应用于地理测量、航行、航空、地图制作等领域。
本文将介绍如何计算测量坐标方位角的公式。
问题陈述给定两个点的坐标(经度和纬度),我们的目标是计算从一个点到另一个点的方位角。
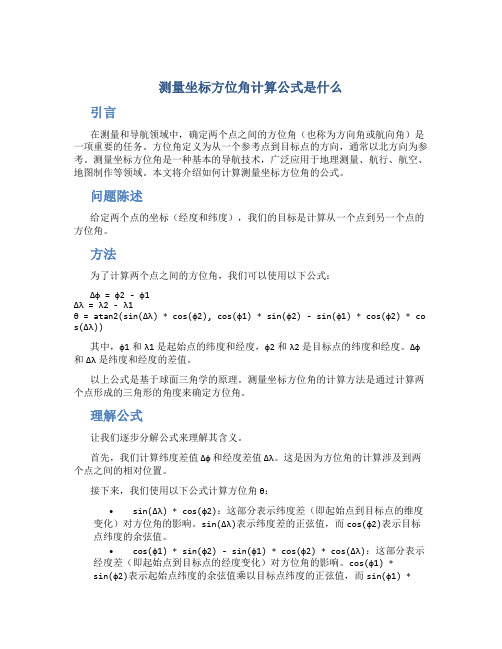
方法为了计算两个点之间的方位角,我们可以使用以下公式:Δφ = φ2 - φ1Δλ = λ2 - λ1θ = atan2(sin(Δλ) * cos(φ2), cos(φ1) * sin(φ2) - sin(φ1) * cos(φ2) * co s(Δλ))其中,φ1和λ1是起始点的纬度和经度,φ2和λ2是目标点的纬度和经度。
Δφ和Δλ是纬度和经度的差值。
以上公式是基于球面三角学的原理。
测量坐标方位角的计算方法是通过计算两个点形成的三角形的角度来确定方位角。
理解公式让我们逐步分解公式来理解其含义。
首先,我们计算纬度差值Δφ和经度差值Δλ。
这是因为方位角的计算涉及到两个点之间的相对位置。
接下来,我们使用以下公式计算方位角θ:•sin(Δλ) * cos(φ2):这部分表示纬度差(即起始点到目标点的维度变化)对方位角的影响。
sin(Δλ)表示纬度差的正弦值,而cos(φ2)表示目标点纬度的余弦值。
•cos(φ1) * sin(φ2) - sin(φ1) * cos(φ2) * cos(Δλ):这部分表示经度差(即起始点到目标点的经度变化)对方位角的影响。
cos(φ1) *sin(φ2)表示起始点纬度的余弦值乘以目标点纬度的正弦值,而sin(φ1) *cos(φ2) * cos(Δλ)表示起始点纬度的正弦值乘以目标点纬度的余弦值再乘以经度差的余弦值。
最后,使用atan2()函数计算弧度,并将其转换为角度值。
结论本文介绍了计算测量坐标方位角的公式。
计算坐标与坐标方位角的基本公式
计算坐标与坐标方位角的基本公式在二维坐标系中,我们可以使用坐标表示一个点的位置。
一个点的坐标通常由一个有序的数对(x,y)表示,其中x表示点在x轴上的位置,y 表示点在y轴上的位置。
除了坐标,我们还可以使用方位角来表示点的位置。
方位角是一个极坐标系中的概念,通过一个长度和一个角度来确定一个点的位置。
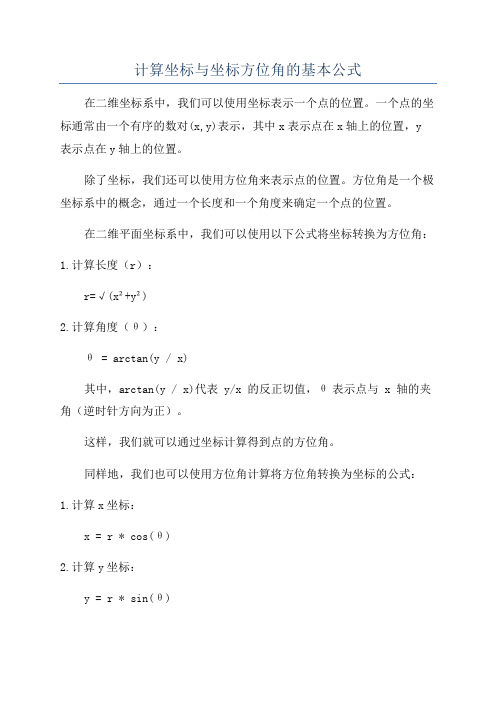
在二维平面坐标系中,我们可以使用以下公式将坐标转换为方位角:1.计算长度(r):r=√(x²+y²)2.计算角度(θ):θ = arctan(y / x)其中,arctan(y / x)代表 y/x 的反正切值,θ表示点与 x 轴的夹角(逆时针方向为正)。
这样,我们就可以通过坐标计算得到点的方位角。
同样地,我们也可以使用方位角计算将方位角转换为坐标的公式:1.计算x坐标:x = r * cos(θ)2.计算y坐标:y = r * sin(θ)其中,cos(θ)代表角度θ 的余弦值,sin(θ)代表角度θ 的正弦值。
这样,我们就可以通过方位角计算得到点的坐标。
需要注意的是,上述公式中的θ是以弧度制表示的。
如果我们要将角度以度数制表示,可以用以下公式进行转换:角度(以度数制表示)=角度(以弧度制表示)*180/π除了上述基本公式,我们还可以通过方位角进行一些其他计算:1.两点之间的距离:d=√[(x₂-x₁)²+(y₂-y₁)²]其中,(x₁,y₁)和(x₂,y₂)是两个点的坐标。
2.两点之间的方位角:θ = arctan((y₂ - y₁) / (x₂ - x₁))这个公式可以用于计算两点之间的方位角,其中(x₁,y₁)和(x₂,y₂)是两个点的坐标。
在三维空间中,我们可以使用类似的方式计算坐标与方位角。
在三维空间中,一个点的坐标通常由一个有序的数三元组(x,y,z)表示,而方位角也变成了一个有序的数三元组(r,θ,φ)表示,其中r仍然表示长度,θ表示与x轴的夹角,φ表示与z轴的夹角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算细则1、坐标计算:X¹=X+Dcosα,Y¹=Y+Dsinα。
式中Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y²-y¹)/(x²-x¹)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y ²-y¹)+(x²-x¹),1)、当y²-y¹>0,x²-x¹>0时;α=arctan(y²-y¹)/(x²-x ¹)。
2)、当y²-y¹<0,x²-x¹>0时;α=360°+arctan(y²-y¹)/(x ²-x¹)。
3)、当x²-x¹<0时;α=180°+arctan(y²-y¹)/(x²-x¹)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y²-y¹)/(x²-x¹)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+∆h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示)1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:∆Xab=Sab×COSαab 则有Xb=Xa+∆Xab∆Yab=Sab×SINαab Yb=Ya+∆Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
解:tanαab=∆Yab/∆Xab所以。
Αab=tan¯∆Yab/∆Xab;则有:Sab=∆Yab/SINαab=∆Xab/COSαab=√∆X²ab+∆Y ²ab;5、緣和曲线的方位角和坐标计算公式:S12=sqr<(X2 -X1)²×(Y2-Y1)²> =sqr( ∆X221×∆Y221)。
A12=arcsin((Y2-Y1)/S12)。
S12为测站点1至放样点2的距离,A12为测站点1至放样点2的坐标方位角。
X1,Y1为测站坐标,X2,Y2为放样点坐标。
新公式:A12=arccos(∆X21/S12)×sgn(∆Y21)360°只需将测量的成果用直线或其他线形连接起来。
坐标输入时需注意交换输入,也就是将实测的X坐标在CAD中当Y坐标输入,而Y坐标则当X坐标输入。
标高则用文字在标注在各相应的坐标点傍。
一、建立新图时(坐标偏移法)1、先按比例大小绘制坐标网格,2、然后将测量整理得来的坐标拐点在CAD中输入绘制矿区范围,3、根据相应的测点坐标绘制实测图,4、填写图例。
二、坐标增量上图(相对坐标法)①:如果比例尺为1:2000,平距除以2之后乘以方位角得坐标增量。
②:点击直线或多线段按(回车键)点击后点,再输入@ΔY,ΔX。
倾斜巷道贯通计算:可根据倾斜角度进行换算,再结合地测交庄书中给的贯距或标高差来算,而且还要结合巷道的断面高差来综合计算。
坡度的表示方法有百分比法、度数法、密位法和分数法四种。
其中百分比法和度数法较为常用。
1、百分比法表示坡度最为常用的方法,即两点的高程差与其水平距离的百分比,其计算公式如下:坡度=(高程差/水平距离)﹡100%,是指水平距离每100米垂直方向上(下降)…米。
2、度数法用度数来表示坡度,利用反三角函数计算而得,其公式如下:TAN(坡度)=高程差/水平距离,所以坡度=TAN-。
一、平巷开门点仪器安设过程:用全站仪确定巷道开门点,C为开门点位置。
1、在B点安置仪器,2、后视A点,用卷尺量出开门点的距离位置,定为C点然后在C点顶板钉点挂占标,再前视C点。
3、把仪器移动安设在C点,后视B点,再用仪器把设计的方位、角度拨出来,用手拿着垂线或粉笔在开门点帮上,用仪器观测,左右移动垂线或粉笔,确定好准确点后用钉子钉上再用喷漆在帮上喷出。
也就是中线点。
为防止以后施工的破坏,多确定几个中线点,也是为了以后方便跟踪测量。
一、标定腰线方法:1、用半圆仪标定倾斜巷道腰线,1点为新开斜巷的起点,称为起破点。
1点高程H1由设计给出,Ha为已知点A高程,从图可知Ha-H1=ha在A点悬挂垂球,自A点向下量取ha,得到a点过a点拉一条水平线I'I,使1点位于新开巷道的一帮上,挂上半圆仪,此时半圆仪上读数应为0。
将1点固定在巷道帮上,在1点系上测绳,沿巷道同侧拉向掘进方向,在帮上选定一点2,拉直测绳,悬挂半圆仪,上下移动测绳,使半圆仪的读数等于巷道设计倾角,此时固定2点,连接1、2点,划出腰线。
2、用经纬仪标定腰线在主要倾斜巷道中,通常采用经纬仪标定腰线,其方法较多,这里只介绍三种。
1)、利用中线点标定腰线,图a为巷道横断图,图b为巷道纵断面图。
标定方法如下:a:在中线点1安置仪器,量取仪器高i。
b:使竖盘读数为巷道的设计倾角,此时的望远镜视线方向与腰线平行。
然后瞄准掘进方向已标定的中线点2、3、4的垂线,分别作临时记号,得到2'、3'、4',倒镜再测一次倾角a作为检查。
c:由下式计算k值:k=H1-(H'1+h)-i。
式中H1―1点处的高程;H'1 ―1点处轨面设计高程;i―仪器高;h ―轨面到腰线点的铅垂距离;d:由中线点的记号2'、3'、4' 分别向下量k值,得到2"、3"、4"即为所求的腰线点。
e:用半圆仪分别从腰线点拉一条垂直中线的水平线到两帮上。
f:用测绳连接帮壁上的2"、3"、4"点并用喷漆沿测绳划出腰线。
3、平巷与斜巷连接处腰线的标定:平巷与斜巷连接处是巷道坡度变化的地方,腰线到这里要改变坡度,巷道底板在竖起面上的转折点称为巷道变坡点,设平巷腰线到轨面或底板的距离为a,斜巷腰线到轨面或底板的法线距离也保持为a,那么,在变坡点处,平巷腰线必须抬高Δh,才能得到斜巷腰线起坡点,或者自变坡点处向前或向后量取距离ΔL,得到斜巷腰线起坡点,由此标定出斜巷腰线。
Δh和ΔL值按下式计算Δh=a/COSδ-a=a(secδ-1)ΔL= Δh.Cotδ。
标定时,测量人员首先应在平巷的中线点上标定出A点的位置,然后在A点垂直于巷道中线的两帮上标出平巷腰线点,再从平巷腰线向上量取Δh (也可向前或向后量取ΔL),得到斜巷腰线起坡点位置。
斜巷掘进时的最初10米,可以用半圆仪在帮手按δ角划出腰线。
倾斜巷道的贯通:上下平巷和一号下山已掘好,二号下山正由下向上开掘至B点,现为加快掘进速度,欲上下同时开掘。
这种贯通的特殊性在于上部开切点P的位置是未知的。
为此,首先应确定P点的位置。
确定P点的位置的方法主要有两种:第一种是根据A和C、B和D的坐标,列出直线方程,求解出交点P的位置。
这种方法解联立方程的工作相当复杂,一般不予采用。
第二种方法是根据三角学的基本知识,解算ΔAPB。
由于在ΔAPB中,A、B的坐标已知,从而可求出它们间的水平距离Lba,和方位角ðab,而且ðba=ðdb,ðap=ðac也是已知的。
这样我们就可以根据正弦定理求得Lap,确定出P点的位置。
Lap=Lba*SINδb/SINδp=<(Ya-Yb)COSðb-(Xa-Xb)SINðdb>/SIN(ðbd-ðca)。
P点确定后,即可测定出其高程Hp,然后即可按与第一个例子类似的方法,标定贯通巷道的中线和腰线。
水平巷道间的贯通:1、准备工作布设仪器和水准路线,计算出A、B点的平面直角坐标(XA,YA)、(XB,YB)以及它们的高程Ha、Hb。
2、计算贯通测量的几何要素(1)计算贯通巷道中心线的方位角aAB:tanaAB=YB-YA/XB-XA。
(2)计算A、B处的指向角β1、β2:β1=αAB- αAC β2=αBA- αBD(3)计算A、B间的水平距离LAB:LAB=√(XB-XA)²+(YB-YA)²。
(4)计算贯通巷道的倾角δ:tanδ=(HB-HA)/LAB。
(5)计算A、B间的斜长LAB:LAB=√LAB²+(HB²-HA²)或LAB=LAB/COSδ。