基于单片机的吸收式造波机控制系统硬件设计
基于单片机的超声波水位控制器的设计

基于单片机的超声波水位控制器的设计一、引言在许多工业和民用领域,如水库、水塔、污水处理厂等,准确监测和控制水位是至关重要的。
传统的水位控制方法往往存在精度低、可靠性差、响应速度慢等问题。
随着电子技术和单片机技术的不断发展,基于单片机的超声波水位控制器应运而生,它具有精度高、响应快、易于实现自动化控制等优点,为水位控制提供了一种更加高效、可靠的解决方案。
二、超声波水位测量原理超声波是一种频率高于 20kHz 的机械波,它在空气中传播时遇到障碍物会发生反射。
超声波水位控制器就是利用这一原理来测量水位的。
控制器通过发射超声波脉冲,并测量从发射到接收反射波的时间间隔,根据声音在空气中的传播速度,就可以计算出传感器到水面的距离。
由于传感器的安装位置是固定的,因此可以通过计算得出水位的高度。
三、系统硬件设计(一)单片机选型在本设计中,选用了_____型号的单片机作为核心控制器。
该单片机具有性能稳定、运算速度快、资源丰富等优点,能够满足系统的控制和数据处理需求。
(二)超声波传感器选择了一款高精度的超声波传感器,其测量范围能够满足实际应用的需求,并且具有良好的稳定性和可靠性。
(三)显示模块为了实时显示水位信息,选用了_____显示模块。
它可以清晰地显示水位高度、报警状态等信息,方便操作人员查看。
(四)按键模块设置了按键模块,用于设定水位的上下限阈值,以及进行系统的参数设置和操作控制。
(五)报警模块当水位超过设定的上下限阈值时,报警模块会发出声光报警信号,提醒操作人员及时采取措施。
(六)电源模块为整个系统提供稳定的电源供应,确保系统的正常运行。
四、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机内部资源的初始化、传感器的初始化、显示模块的初始化等。
然后进入主循环,不断地采集水位数据、进行数据处理和判断,并根据判断结果控制显示模块和报警模块。
(二)数据采集与处理程序通过单片机的定时器和中断功能,精确地测量超声波从发射到接收的时间间隔,并将其转换为水位高度。
基于单片机的声光开关控制系统的设计与实现
在本设计中用 3 个按键来模拟声光传感器和热释电传感器, 使用 1 个按键来设定模式切换。
此设计使用一个继电器来进行对声光开关的控制切换,通 过单片机 P26 口接在三极管 PNP 的基极上,当 P26 输出一个低电 平的时候,三极管导通,继电器线圈得电吸合,声光指示灯亮。当 P26 输出一个高电平,三极管截止,继电器线圈不得电不吸合,声 光指示灯灭。
定时器中断采用了定时器 0 中断程序,工作方式为方式 1, 定时器进入中断后首先定义了一个局部变量 m 用于计数,然后进 行定时器初值设定,TH0=0x3c;TL0=0xb0; 当两个 8 位寄存器计 数达到 0xff 的时候,计数器溢出触发中断标志位,将再次进入中 断程序。m 变量每进入一次中断就进行一次自加运算,当判断语 句检测到 m 等于 20 的时候就进行秒变量 sec 进行自加,当 sec 大于等于 30 的时候执行 sec 清零,并执行灭灯语句,关闭定ห้องสมุดไป่ตู้器
Abstract :This design is based on AT89C51 single-chip microcomputer and C language.Sound and light control switch circuit is made of photosensitive resistance, electret microphone,power circuit and silicon controlled, which can achieve to switch working state of sound and light control switch. Keywords :AT89C51; Photosensitive Resistance;Switching Circuit
基于PIC16C54单片机的全自动豆浆机控制系统

基于PIC16C54单片机的全自动豆浆机控制系统刘 升1,杨静丽2(1.淮北煤炭师范学院计算机系,安徽省淮北市235000;2.辽宁石油化工大学信息工程学院,辽宁省抚顺市113001)【摘 要】 介绍了以PIC16C54单片机为核心控制部件的全自动豆浆机的工作原理,给出了控制系统的具体硬件电路和软件设计方法。
该豆浆机由粉碎黄豆的搅拌机、豆浆加热器和控制电路3大部分组成;性能稳定,使用方便,与市售的豆浆机相比,由于在豆浆沸腾后进行小功率加热熬煮,避免了继电器的过多动作和豆浆的溢出,并且产出的豆浆具有浓香风味;从黄豆的粉碎、过滤到豆浆的加热、煮熟全过程实现全自动,只需20min 即可制成1.4L 豆浆。
关键词:PIC16C54,豆浆机,控制系统,缺水检测中图分类号:TP278收稿日期:20042042160 引 言豆浆机由粉碎黄豆的搅拌机、豆浆加热器和控制电路3部分组成。
基于PIC16C54单片机的全自动家用豆浆机,只要接通电源,就能从黄豆的粉碎、过滤到豆浆的加热、煮熟全过程实现全自动,只需20min 即可制成1.4L 豆浆。
方便省时、卫生新鲜;有可靠的缺水保护,防止干烧;豆浆沸腾后通过降压电路降低加热器的功率,使豆浆完全煮熟,且具有浓香风味。
PIC 系列单片机速度快,工作电压低,可直接驱动L ED 负载,具有低价一次性编程技术,功耗低,体积小,广泛应用于工业控制及智能设备中。
本文选用的PIC16C54单片机,内含512×12位ROM 、32B 通用RAM 、18根引脚、内部自振式看门狗(WD T ),支持低成本的RC 振荡,特别适合智能家电使用[1]。
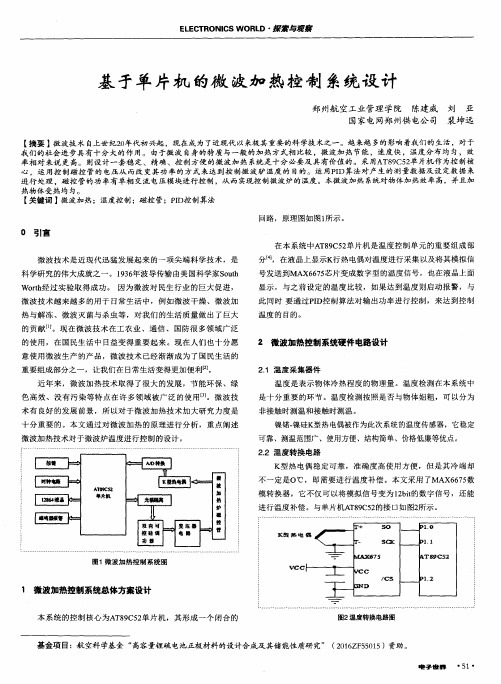
1 控制电路组成及工作原理电路如图1所示。
主要由稳压电路、PIC16C54单片机、缺水检测电路、沸腾检测电路、电动机控制电路、加热控制电路、报警电路等组成。
图1 豆浆机控制电路原理・77・第30卷第7期 2004年7月 电子工程师 EL ECTRON IC EN GIN EER Vol.30No.7 J ul.2004 220V 交流电源经变压器降压和桥式整流,得到+12V 电压,给继电器J 1~J 3和蜂鸣器供电。
单片机控制的PWM系统设计

单片机控制的PWM系统设计
巨永锋
【期刊名称】《电气自动化》
【年(卷),期】1996(018)005
【摘要】建立了以8031单片机控制的带电流反馈的PWM功率放大器系统,电流调节器采用数字PI调节器,在软件编制中应用了一种积分实现技术,较大限度地利用了系统的动态信息,调节速度快、精度高。
该系统克服了模拟功率放大器由于温漂而造成的控制精度下降的缺陷。
【总页数】3页(P14-16)
【作者】巨永锋
【作者单位】无
【正文语种】中文
【中图分类】TN722.75
【相关文献】
1.基于单片机的PWM直流调速控制系统设计 [J], 王珣;杜茂华;卢培进
2.基于单片机的PWM直流电机控制系统设计 [J], 邹爱成;曹轶杰
3.基于单片机控制的直流电机PWM调速系统设计 [J], 李玮
4.基于Proteus的单片机PWM直流电机速度控制系统设计 [J], 乔志杰;曾金明
5.基于Proteus的单片机PWM直流电机速度控制系统设计 [J], 乔志杰;曾金明因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机微波炉控制系统设计田龙根
基于单片机微波炉控制系统设计田龙根发布时间:2021-09-14T02:44:01.107Z 来源:《建筑工人》2021年第7期作者:田龙根[导读] 倒计时、模式设置、和报警功能是智能微波炉系统硬件部分主要的研究内容。
因此,本次设计主要从硬件和软件两大部分来研究设计。
身份证号码:43062619****287333摘要:随着社会的快速发展,城镇居民生活方式越来越趋向于智能化。
有需求就会有解决办法,催生出了各种各样的智能控制设备。
传统的家用电器已经满足不了需求,微控制器技术的不断进步,社会各界广泛应用。
人的生存离不开食物,食物对人们的生活起到了关键作用。
于是本文介绍了一种单片机控制微波炉系统,其具有高精度、稳定可靠、成本相对较低等特点。
本系统采用单片机测控技术,通过定时器模块设置定时,可实时监测加热时间,以及进行火力调节,模式调节等,达到食物加热的目的。
利用单片机技术和定时器实现了对微波炉的智能控制,解决了传统食物加热过程中重复加热等、干烧问题,对人体的健康和财产安全具有深远影响。
关键词:AT89C51;传感器;智能微波炉;单片机1 前言1.1智能微波炉的主要功能本课题设计的智能微波炉设备具有设置模式、设置火力、设置倒计时、显示数值、结束报警等功能。
主要按键有:①模式按键:可选择0~9九种加热模式。
②火力按键:按下之后可设置0~3,即高火、中火、低火三种模式模式。
③时间设置:可以任意调价加热倒计时。
其他主要功能有:①指示灯:当通电的时候,指示灯亮,表明电源已接通;②加热提示:当确认按钮被按下的时候,开始加热,并且加热提示灯置高电平,提示用户开始加热。
当再次按下的时候,加热提示灯置低电平,提示灯灭,表示加热完成。
③蜂鸣器:当加热结束之后,蜂鸣器持续响。
④显示功能:可显示时间、模式、火力的设置,还能实现倒计时。
到技术,在设置数值时实现人机交互。
1.2主要设计内容倒计时、模式设置、和报警功能是智能微波炉系统硬件部分主要的研究内容。
基于AT89C51单片机的播种机排种盘震动控制系统设计

基于AT89C51单片机的播种机排种盘震动控制系统设计摘要播种机排种盘在实际生产中,由于播种盘转速不稳定等原因,容易出现种子颗粒落地不均匀的情况。
为了解决这一问题,本文设计了一种基于AT89C51单片机的播种机排种盘震动控制系统。
该系统主要包括单片机控制器、马达驱动电路和震动传感器等组成部分,利用震动传感器对播种盘的震动情况进行反馈控制,调整马达的输出电流大小以达到控制震动的目的。
实验结果表明,所设计的控制系统具有良好的控制效果和实用性。
关键词:AT89C51单片机,播种机,排种盘,震动控制系统AbstractIn practical production, the seeding disk of the seeder is prone to uneven seed dropping due to unstable rotation speed of the seeding disk. In order to solve this problem, this paper designs a seeding disk vibration control system based on the AT89C51 single-chip microcomputer. The system mainly includes a single-chip microcomputer controller, motor drive circuit, and vibration sensor. The system uses a vibration sensor to feedback the vibration of the seeding disk, adjusts the output current of the motor to control the vibration. Experiment results show that the designed control system has good control effect and practicality.Keywords: AT89C51 single-chip microcomputer, seeding machine, seeding disk, vibration control system第一章绪论1.1 研究背景播种机是现代农场不可缺少的机器,其主要功能是将种子粒料均匀地撒在土地上,使作物得以良好生长发展。
毕业设计---基于单片机的微波炉控制器[管理资料]
![毕业设计---基于单片机的微波炉控制器[管理资料]](https://img.taocdn.com/s3/m/f1ca7a05f61fb7360b4c65f8.png)
学生签名
26
参考文献29
摘 要
随着社会的快速发展,人们的生活节奏逐渐加快,微波炉方便快捷的烹饪特点为现代人的生活提供了便利,在现代家庭中,微波炉已成为必备的烹饪工具之一。
通过制作微波炉控制器,更充分了解微波炉的结构特点和工作原理。本文介绍了微波炉控制器的设计、调试与实现。本设计中的微波炉控制器以AT89C52单片机为核心,由矩阵键盘、时间显示、控制输出等模块组成。并且能够实现大、中、小火力选择以及启动、停止和时间重设功能。其中初始时间由矩阵键盘输入设置,火力大小通过发光二极管来表示、电机的转速表示在加热中。微波炉控制器工作时,将按照设定的时间进行加热并倒计时,等时间到后报警提示、火力指示灯熄灭、转盘停止运转。
{ for(row=0;row<3;row++)
{ if(keyin==(0x01<<row))
{ kcode=row+3*col; //计算出按键码
digit=digit*10+kcode; //扫描码写入七段数码管数组
digit=digit%1000;//取输入的后四位,输入不够四位高位为零
break; //离开第row列扫描
确定矩阵式键盘上何键被按下,介绍一种“行扫描法”。
行扫描法行扫描法又称为逐行(或列)扫描查询法,是一种最常用的按键识别方法,如上图所示键盘,介绍过程如下:
判断键盘中有无键按下将全部行线Y0-Y3置低电平,然后检测列线的状态。只要有一列的电平为低,则表示键盘中有键被按下,而且闭合的键位于低电平线与4根行线相交叉的4个按键之中。若所有列线均为高电平,则键盘中无键按下。
(3)采用先进的技术与器件,设计控制部件的硬件实现的线路图;
基于单片机的饮水机控制系统
济南大学泉城学院毕业设计题目基于单片机的饮水机控制系统设计学院工学院专业电气工程及其自动化班级1302班学生孙谦学号2013010875指导教师张兴达魏志轩二〇一七年五月十六日摘要目前,饮水机已经普遍进入人们的日常生活。
多数家庭使用的饮水机只有一些基本的功能,例如加热、保温、简单的指示功能等。
然而,伴随着人们物质生活质量的不断提高,对饮水机的性能要求也不断提高。
为了满足人们对饮水机的性能要求,本课题提出了一种基于单片机的饮水机控制系统,主要实现了以5℃为最小温差进行水温精确控制、实时的温度显示、防干烧报警等功能。
本设计主要包含硬件部分和软件部分。
硬件部分包含主控部分、温度采集部分、显示部分、按键输入部分以及报警部分。
软件部分以C语言为工具,结合设计功能,设计了完整的程序流程图,并完成了程序编写调试。
通过软件仿真调试以及实物制作运行调试,证明系统具有良好的饮水机控制能力且安全可靠。
为进一步的研究与应用提供了一定的数据参考依据。
关键词:AT89S52单片机;传感器;饮水机ABSTRACTAt present, drinking fountains have generally entered people's daily life. Most families use water dispensers with only basic functions such as heating, insulation, simple instructions, etc.. However, with the continuous improvement of people's quality of material life, the performance requirements of water dispensers are also increasing. In order to meet people on the performance of drinking water machine, this paper puts forward a kind of drinking water machine control system based on MCU, is realized by 5 DEG C for the minimum temperature difference for precise temperature control, real-time temperature display, prevent dry alarm function.This design mainly contains the hardware and software. The hardware part includes the main control part, the temperature acquisition part, the display part, the key input part and the alarm part. In the software part, the C language is used as the tool and the design function is used to design the complete program flow chart, and the program is debugged. Through software simulation, debugging and physical production, operation and debugging, it proves that the system has good control ability of water dispenser, and it is safe and reliable. It provides a certain data reference for further research and application.Key words: AT89S52 microcontroller; sensor; water dispenser目录摘要 (I)ABSTRACT .......................................................................................................................... I I 1绪论 (1)1.1 课题研究现状 (1)1.2 课题研究目的和意义 (1)1.3 课题研究主要内容 (2)2系统硬件设计 (3)2.1系统硬件总体设计 (3)2.2 主控部分 (3)2.2.1 AT89S52功能特性描述 (4)2.2.2 AT89S52晶振电路 (4)2.3 测温电路的设计 (5)2.3.1 DS18B20的主要性能 (5)2.3.2 AT89S52最小系统 (8)2.4 输入电路 (9)2.5 显示电路 (10)2.6 出水及加热执行电路 (11)3系统软件设计 (13)3.1 软件设计思路 (13)3.2 主程序设计 (13)3.3 子程序设计 (15)3.3.1 温度检测子程序 (15)3.3.2 显示子程序 (15)3.3.3 键盘输入子程序 (16)4 系统仿真调试及实现 (17)4.1 软件仿真调试 (17)4.1.1 新建工程 (17)4.1.2 新建文本 (17)4.1.3 添加文本 (18)4.1.4 程序编译 (18)4.2 硬件调试 (19)4.2.1 电源电路仿真 (19)4.2.2 出水电路模块仿真 (19)4.2.3 加热模块电路仿真 (20)4.2.4 显示模块电路仿真 (21)4.2.5 报警电路仿真 (21)4.3 系统实现及调试 (22)结论 (27)致谢 (28)参考文献 (29)附录1 (30)附录2 (31)附录3 (32)1绪论1.1 课题研究现状饮水机自发明以来,每年在中国的发展日益增长。
基于单片机的艾灸烟雾处理机控制系统设计
基于单片机的艾灸烟雾处理机控制系统设计全文共四篇示例,供读者参考第一篇示例:一、引言本文将设计一种基于单片机的艾灸烟雾处理机控制系统,通过采用单片机控制技术,实现对艾灸烟雾的自动控制和处理,有效减少烟雾对人体的伤害,保障用户的健康。
二、系统组成1. 单片机控制模块:采用ATmega328P单片机作为控制核心,负责对整个系统的控制和监测。
2. 艾灸烟雾传感器模块:通过传感器模块对艾灸产生的烟雾进行实时监测,并将监测到的数据传输给单片机控制模块。
3. 风机控制模块:利用风机控制模块对烟雾进行有效处理,通过排风的方式将烟雾排出室外,保障室内空气清新。
4. 显示模块:对系统的运行状态进行实时显示,包括烟雾浓度、风机工作状态等信息。
5. 外部控制接口:通过外部控制接口,用户可以手动控制系统的开关、风机的转速等参数。
三、系统工作流程2. 单片机控制模块对接收到的烟雾数据进行处理,并根据预设的阈值进行判断。
当烟雾浓度超过阈值时,单片机将启动风机控制模块。
5. 当烟雾浓度降低到预设的安全范围内时,单片机将关闭风机控制模块,系统恢复待机状态。
四、系统设计1. 单片机控制模块设计单片机控制模块采用ATmega328P单片机,通过对采集到的烟雾数据进行处理,并根据预设的阈值进行判断,实现对系统工作状态的控制。
单片机还负责与其他模块的数据交互和控制信号的传输。
2. 艾灸烟雾传感器模块设计风机控制模块采用电机驱动芯片L298N,通过控制L298N输出端口的高低电平,来控制直流风机的转速。
风机控制模块还配备有过流保护电路和防反馈电路,以确保风机的稳定和安全运行。
4. 显示模块设计五、系统性能1. 系统稳定性:采用单片机控制技术,系统稳定可靠,能够实现对烟雾的精确监测和有效处理。
2. 系统灵活性:通过外部控制接口和显示模块,用户可以对系统的参数进行调整,满足不同用户的需求。
3. 系统安全性:采用风机进行烟雾处理,避免了烟雾对人体的伤害,保障用户的健康。
基于单片机的微波加热控制系统设计
V C C
3 微波加热控制系统软件设计
在 第2 节 中简 单介 绍 了一些硬 件 电路 , 但是一个系 统还 需要 软件 的配 合才能实现 其 功能 。随着 国 内科技 方面 的兴起 ,单片机 编 程的水平 也越来越 高,这样为 我们提供 了便
利 的 条件 [ 5 1 。 在 软 系 统 的 设 计 当 中 ,其 主程 序 内部 初 始 化 完 成 , 其 他 的就 由子 程 序 来 独 立 完 成 。
温 度是表示物体冷 热程度 的物理 量。温度检测 在本系统 中
是 十 分 重 要 的 环 节 。温 度 检 测 按 照 是 否 与 物 体 姐 粗 , 可 以分 为
非接触时测温和接触时测温 。
镍锘. 镍硅K型热电偶被作为此次系统的温度传感器 ,它稳定 可靠 、测温范围广 、使用方便 、结构简单、价格低廉等优点 。 2 . 2 温度转换 电路 K型热 电偶稳 定可靠 ,准 确度 高使 用方便 ,但是其 冷端却 不一定是O* C,即需要进 行温度补偿 。本 文采用 了MAX 6 6 7 5 数 模 转换器 ,它不仅可 以将模拟信 号变为 1 2 b i t 的数字 信号,还能 进 行温度补偿 。与单片机A T 8 9 C 5 2 的接 口如 图2 所示 。
的贡献 J 。 现 在 微 波 技 术 在 工 农 业 、 通 信 、 国 防很 多 领 域 广 泛
分” 】 ,在液 晶上显示K行热 电偶对温度进行采集 以及将其模拟信
号 发 送  ̄ MA X6 6 7 5 芯 片 变 成 数 字 型 的 温 度 信 号 , 也 在 液 晶上 面
显示 ,与之 前设定 的温 度 比较 ,如果 达到温度则启 动报警 ,与 此 同时 要 通过P I D控制 算法对输 出功 率进行控制 ,来达到控制
基于单片机的自动对焦系统的硬件设计中期报告 B09010137王静 导师:吴慎将

西安工业大学北方信息工程学院毕业设计(论文)中期报告
题目:基于单片机自动对焦系统的
硬件设计
系别光电信息系
专业测控技术与仪器
班级 B090101
姓名王静
学号 37
导师吴慎将
2013 年 3 月15 日
图1 方案框图
具体工作原理:将光敏电阻放置在工作台上的工件表面上,激光打标机发射的准直激光与辅助光源发射出的红光相交于一点(该点为焦点),用步进电机调节距离,寻找该点。
方法是:用光敏电阻遇强光之后输出电阻值,两端外加电压后,用电压比较器比较出高电平,输入到51单片机进行处理,信号反馈到步进电机模块,经驱动电路进行信号放大后,传输给步进电机,并由步进电机调整距离至焦点处。
注:如果
图1 LM339电压比较器
注:1)正文:宋体小四号字,行距20磅,单面打印;其他格式要求与毕业论文相同。
2)中期报告由各系集中归档保存,不装订入册。
基于单片机系统的创新设计“模拟呼吸系统”教具

基于单片机系统的创新设计“模拟呼吸系统”教具发布时间:2022-03-24T06:36:55.579Z 来源:《教学与研究》2021年第9月25期作者:袁小玲[导读] 文中基于单片机开发的创新设计“呼吸系统”教具,能够更好地帮助学生观察我们人体吸气和呼气的过程。
袁小玲广东省中山市港口镇中心小学 528447摘要:文中基于单片机开发的创新设计“呼吸系统”教具,能够更好地帮助学生观察我们人体吸气和呼气的过程。
该教具具有演示生动,现象直观、形象等特点,让学生能直观地观察和感受人体吸气和呼气时肺部的扩张与收缩。
运用单片机编程的形式控制和展示这一呼吸过程,激发学生的好奇心,培养学生对科学技术以及物联网的兴趣和爱好,启发学生的创新思维。
关键词:呼吸系统;创新教具;单片机一、教材存在的不足“吸气和呼气”的活动是粤教版《科学》三年级下册“我们离不开呼吸”一课中内容。
教材的要求是:通过观察,让学生了解人体如何通过呼吸系统与外界的空气进行交换的。
本环节的目的让学生观察人体呼吸系统示意图,了解人在呼吸时,空气经过了哪些器官。
但在教学实践中发现,教材上的观察活动,存在几个问题:只提供人体呼吸系统示意图,学生从图中只能看出空气从鼻进入,经过咽喉、气管、支气管,最后进入到肺;另外学生在做吸气和呼气的动作时,感受有差异:有些同学说吸气时胸廓会变大,呼气时胸廓会变小,但有些同学却说吸气时胸廓会变小,呼气时胸廓会变大,单凭一幅图,无法证明哪种说法是正确的。
为此,我制作了新型创新教具——模拟呼吸系统装置,并用此创新制作的教具进行了演示,取得了不错的教学效果。
二、创新教具的设计思路人体吸气:空气由体外→咽→喉→气管→肺,这一过程在kt板上可以用流水灯动态显示出来,控制单片机在相应io口输出不同的逻辑电压,实现LED灯的亮和灭。
在图上有关位置放置好发光二极管,通过灯的依次亮灭,模拟空气进入肺的这一过程。
当空气进入肺部,胸腔将会膨胀,在肺部的位置围绕上灯带和塑料薄膜,控制单片机输出不同电压控制灯带的明暗程度以及控制电机旋转使薄膜膨胀,利用呼吸灯的明暗和薄膜的扩张程度,模拟胸腔的扩张现象。
基于单片机波形发生器硬件设计论文
基于单片机的波形发生器的硬件设计【摘要】本设计是基于单片机at89s52和dac0832数模转换器组成的波形发生器。
正弦波,三角波,方波的产生是通过单片机编程实现。
通过按键选择波形的输出以及控制波形的频率和幅值输出,同时采用液晶lcd1602实时显示波形频率和幅值。
输出电压幅值范围为0-5v。
以单片机核心控制电路,键盘电路,数模转换电路,液晶显示电路,倍频电路等来实现波形发生器的设计。
【关键字】单片机波发生器数模转换频率幅值波形发生器是一种常用的信号源,常包括有音频信号发生器,函数发生器,脉冲发生器,射频信号发生器,任意波形发生器等,在科学研究,生产实践中都有重大的应用。
传统设计波形发生器主要是通过硬件电路搭接形成的,这种设计存在波形不稳定,控制比较难而且电路比较复杂,体积大,功耗大等缺点。
随着信息技术的发展,科学技术的研究以及仪器的智能化,都给我们带来方便。
本设计是采用单片机来产生几种不同的波形,集成度高,体积小,低功耗,性价比高。
在一些设计研究中通常需要一种有特殊要求的信号来作为测试的信号源,比如能产生正弦波,三角波,方波等信号的波形,并能实现幅值和频率的可调。
这样的设计更接近智能化,也是市场的需求所在。
一、总体设计思路本设计主要以at89s52单片机为控制核心,由单片机编程产生三种波形的程序,p0口向dac0832送信号值, lm324运放实现了把dac0832的输出电流值转换成对应的电压值,这样可以输出不同的波形。
通过p1口的按键来选择三种波形的输出,以及频率和幅值的增加与减少,同时在lcd上实时显示波形幅值和频率。
为了实现信号的高频率输出,采用倍频电路来提高频率。
硬件需求:●万用表:主要用来检测制作的pcb板有没有断路,短路,电子元件是否连接完好,电路板通电后的部分的电压电流是否正常等。
●所选元件:at89s52单片机,液晶显示屏。
●烧写器:主要用来把完成的软件程序烧写到89s52单片机上。
基于单片机的数字波形发生器设计及仿真
安徽文达信息工程学院毕业论文基于单片机的数字波形发生器设计及仿真专业班级:电子信息工程姓名:王晓侠学号:日期:2015 年 4 月24 日摘要:信号发生器是一种常用的信号源,广泛地应用于电子电路、自动控制系统和教学实验等领域。
波形发生器亦称函数发生器,作为实验用信号源,是现今各种电子电路实验设计应用中必不可少的仪器设备之一。
目前,市场上常见的波形发生器多为纯硬件的搭接而成,且波形种类有限,多为锯齿、正弦、方波、三角等波形。
目前使用的信号发生器大部分是函数信号发生器,且特殊波形发生器的价格昂贵。
所以本设计使用的是89C52单片机构成的发生器,可产生三角波、方波、正弦波等多种特殊波形和任意波形,波形的频率可用程序控制改变。
在单片机上加外围器件距阵式键盘,通过键盘控制波形频率的增减以及波形的选择,并用了LCD显示频率大小。
在单片机的输出端口接DAC0808进行D/A转换,再通过运放进行波形调整,最后输出波形接在示波器上显示。
在介绍DAC0808芯片特性的基础上,论述了采用DAC0808芯片设计数字函数信号发生器的原理以及整机的结构设计。
对其振荡频率控制、信号输出幅度控制以及频率和幅度数显的实现作了较详细的论述。
本系统利用89C52设计一个函数信号发生器,详细说明了其实现过程。
本系统使用汇编语言编写,用89C52单片机来实现各模块功能,使用PROTEUS进行仿真。
本文描述使用汇编语言和PROTEUS仿真实现函数信号发生器的基本功能,实现了方波、三角波、正弦波、锯齿波,本文给出了源程序、各模块的连接图以及仿真图,并做出了详细的分析。
关键词:PROTEUS 信号发生器89C52Based on single-chip signal generator design and simulationAbstract:Signal-generator is a kind of signal source in common use, broadly applied at the electronics electric circuit, auto control system and teaching experiment etc. Currently used mostly function signal generator signal generator, waveform generator and a special price of expensive . So the dissertation is usage of the 89C52 single-chip microcomputer constitute of wave-form generator, which can generate triangle wave, square wave, sine wave etc variety wave-form, the period of wave can be controlled by procedure, at outer circle spare part of the machine, plus independence type keyboard , which can control wave increase or decrease of form-frequency and the choice of wave-form, at the same time LED display frequency size. The output of the machine connect DAC0808 to carry on a DA conversion,again pass operation amplifier to put an end exportation wave-form.Based on the introduction of DAC0808 , we discussed the principle and the whole frame of the digital function signal generator. We described the control of the oscillatory frequent , amplitude and the digital display in detail.This system uses 89C52 designed a function signal generator, describes detailedly the implementation process. The system uses the Assembler language, realizing every function uses 89C52, applying PROTEUS to simulate in order to realize the function every modules. This article describes the use of Assembler language and PROTEUS simulation, to achieve the basic functions of the Function signal generator, realized square-wave, triangle wave, sine wave, saw-tooth wave ,This article gives the original program and the simulating diagram and the combination of all of the modules, gives detail analysis of every simulating diagram as well.Keywords: PROTEUS Signal generator 89C52目录摘要: (II)Abstract: (III)第1章绪论 (1)1.1 信号发生器概述 (1)1.2 本论文主要研究的内容 (1)1.3 系统设计方案 (2)1.3.1 系统分析 (2)1.3.2 系统要求与需求分析 (3)第2章硬件设计 (4)2.1 总体硬件设计 (4)2.2 系统模块设计 (5)2.2.1显示器接口设计 (5)2.2.2 复位与时钟电路设计 (6)2.2.3 键盘接口设计 (7)2.2.4 D/A转换设计 (8)第3章软件设计 (11)3.1 软件总体设计 (11)3.2 软件功能设计 (12)3.2.1 系统初始化流程 (12)3.2.2 键盘扫描及处理程序设计 (13)3.2.3中断服务流程 (16)3.2.4 正弦波发生流程 (17)3.2.5 三角波发生流程 (21)3.2.6 方波发生流程 (22)3.2.7 锯齿波发生流程 (23)第4章系统调试 (25)4.1 PROTEUS软件仿真过程 (25)4.2 仿真结果 (26)4.3 仿真总结 (28)第5章结论与展望 (29)5.1 结论 (29)5.2 展望 (29)致谢...................................... 错误!未定义书签。
基于单片机的艾灸烟雾处理机控制系统设计
基于单片机的艾灸烟雾处理机控制系统设计为了解决艾灸烟雾问题,设计了一款基于单片机的艾灸烟雾处理机。
该处理机可有效过滤掉艾灸产生的烟雾,减少烟雾对人体的危害,保证室内环境的健康和安全。
本文将介绍该艾灸烟雾处理机的控制系统设计,包括硬件设计和软件设计两个方面。
硬件设计本系统的硬件设计采用了单片机为核心部件,将处理机的各个功能模块通过单片机进行控制和管理。
处理机的硬件设计包括光电传感器、风扇、LED指示灯、电路板等几个部分:(1)光电传感器光电传感器主要用于检测处理机内的艾灸烟雾。
当烟雾浓度达到一定值时,光电传感器会自动发出信号,让处理机启动风扇和过滤器的工作。
(2)风扇处理机内的风扇主要用于吸入和排出室内的空气。
当光电传感器检测到烟雾时,风扇会自动启动,吸入室内的空气,把空气中的烟雾送入过滤器进行处理,最后排出干净的空气。
(3)LED指示灯LED指示灯用于显示处理机的工作状态。
当光电传感器检测到烟雾时,指示灯会变成绿色;当烟雾被处理完毕后,指示灯会变成蓝色。
(4)电路板(1)单片机程序设计单片机程序设计是整个处理机的核心部分,主要负责控制和管理处理机的各个功能模块。
程序设计的主要过程包括传感器检测、风扇控制、LED显示等几个步骤。
传感器检测部分主要负责检测室内的烟雾浓度,当烟雾浓度达到一定值时,单片机会自动启动风扇和过滤器进行烟雾处理。
风扇控制部分主要负责控制风扇的运转,保证空气的流动。
LED显示部分主要负责显示处理机的烟雾处理状态。
(2)界面设计界面设计主要负责处理机的人机交互部分,包括用户界面和管理员界面。
用户界面主要用于显示处理机的运行状态和处理效果,让用户可以直观地了解处理机的工作情况;管理员界面主要用于实现处理机的远程管理和监控,让管理员可以轻松地掌握处理机的工作情况和处理效果。
总结。
浅谈单片机的系统设计方法
浅谈单片机的系统设计方法
于纪波
【期刊名称】《科技情报开发与经济》
【年(卷),期】2003(013)005
【摘要】从硬件设计和软件设计两个方面阐述了单片机的系统设计方法.
【总页数】2页(P179-180)
【作者】于纪波
【作者单位】山西经济管理干部学院,山西省太原市南内环西街,030024
【正文语种】中文
【中图分类】TP31
【相关文献】
1.浅谈单片机非编码键盘工作原理及设计方法 [J], 李伍元
2.嵌入式系统设计方法的演化——从单片机到单片系统 [J], 窦振中
3.浅谈单片机应用系统的设计方法 [J], 徐晓建
4.基于单片机的步进电机系统设计方法探究 [J], 姜昊;郑颖
5.基于单片机的镀液温度智能控制系统设计方法浅谈 [J], 莫中凯
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Trio控制器的吸收式造波机运动控制系统设计

基于Trio控制器的吸收式造波机运动控制系统设计张小乐;呼英俊【摘要】An absorbing wave maker motion control system was designed with the combination control of PC and Trio con-troller. EtherNet/IP and SERCOS communications protocol was used to realize data exchange. In the host computer,C lan-guage and Fortran mixed programming method was used. The actuator was controlled by the Trio controller with Trio Basic language program to realize the motion control. Experiments show that the newly designed absorbing wave maker motion control system is very stable and can obtain the desired height.%设计了基于Trio控制器的吸收式造波机运动控制系统,确定了其PC和运动控制器相结合的控制方式。
选择了Trio 控制器,并结合EtherNet/IP和SERCOS通信协议实现数据交换。
上位机程序设计采用C语言和Fortran混合编程方式,对执行机构的控制由Trio控制器自带Trio Basic语言编写运动控制程序程实现。
实验表明,设计的吸收式造波机控制系统得到的波面最稳定,能获得期望波高。
【期刊名称】《天津科技大学学报》【年(卷),期】2014(000)002【总页数】4页(P67-70)【关键词】吸收式造波机;运动控制;Trio控制器【作者】张小乐;呼英俊【作者单位】天津科技大学机械工程学院,天津 300222;天津科技大学机械工程学院,天津 300222【正文语种】中文【中图分类】TH123造波机是在实验水池中模拟波浪的设备,可人工控制产生不同类型的波浪,模拟实际海浪对船舶或各种建筑物的作用.但因为实验水池的长度有限,造波机对模型或池壁的反射波会再一次反射,即波浪的二次反射,它会严重影响实验结果.而吸收式造波机在产生拟需波浪的同时,能吸收实验区域内的二次反射波,其原理是在推波板式造波的基础上,通过采集、计算波浪数据,给推波板一个附加的二次位移,以消除反射波浪撞击推波板形成的二次反射波,从而更真实地模拟海浪的运动[1].现有吸收式造波机多采用工控机与控制卡的方式进行运动控制[2].这种方式提前设定工控机和控制卡的相关程序,硬件组成、连接及操作都比较简单.其缺点在于集成化过高,扩展性、互换性不好,在不同造波环境、不同造波条件下难以通用;各种处理运动控制和参数采集的板卡全由工控机控制,还需进行模数转换,延缓了控制命令传输和采集信号处理的时间,控制时效和精度不够理想.随着计算机控制技术的发展,运动控制也逐渐网络化、数字化.网络化使控制更灵活、开放,数字化使控制更简单、精确.采用PC和运动控制器相结合的控制方式,用PC作为信息处理平台,可发挥PC的信息处理快、开放的程序语言及可在线网络检测和修复等优点;用控制器实现期望造波运动,可充分利用运动控制器中的运动算法和进行精确的轨迹控制.这种方式的信息处理速度快、运动控制精度高、开放扩展程度好、系统可靠性高,更适合吸收式造波[3–4].本文针对吸收式造波,选择支持网络化、数字化的运动控制器,在程序设计中利用C语言应用广泛、人机交互方便和 Fortran语言在数据处理上的优势,并调用运动控制器的运动算法,使得造波运动程序设计、参数设置和数据分析都更简单,较好地实现了吸收式造波.1 运动控制系统的基本工作原理吸收式造波机运动控制系统的工作原理见图 1.根据期望的波高周期数据,由上位机程序计算推波板的位移和时间控制信号,运动控制器接收后将其转换为运动方向和速度的控制信号,伺服驱动器再将其转换为脉冲信号驱动伺服电机运动,经执行装置带动推波板作相应的往复运动,推动水面产生波浪.在推波板前固定距离处设置 2个波高传感器采集推波板前的波高信号.运动控制器根据反馈信号计算设定值与实测值之间的差值,并以此调整下一时刻控制推波板的位移,使之生成与反射波反相位的波,以消除二次反射波,实现吸收式造波;另一方面,波高信号反馈回PC,与期望波谱的数据对比,完成统计分析.在吸收式造波机工作过程中,最重要的是要实时采集推波板前波高数据,迅速计算得出下一位移量并确保执行装置及时响应,这就对运动控制器的性能及信号传输速度提出了较高的要求.图1 运动控制系统的工作原理Fig.1 Block diagram of the motion control system2 运动控制器及其通信2.1 Trio控制器运动控制器选用 Trio Motion公司的 Trio MC224型数字独立运动控制器,其融合了最新的控制理论和技术,具有多种控制和通信方式、多任务编程、可扩展性丰富等优点.它采用 32位 120~150,MHz的 DSP微处理器,计算速度快,控制精度高,满足吸收式造波对控制器运算速度的要求;包含直线运动、梯形运动、曲线运动等多种轴运动轨迹控制模式,可完全脱离 PC独立进行控制,在 PC出现通信故障等问题时,依然可以进行吸收式造波的控制.控制器采用模块化设计,可连接扩展多种具有轴控制功能的子板,实现对多个伺服单元的控制,在大港池、多方向条件下造波也完全适用.控制器与 PC间通信可采用总线或网络方式,如PROFIBUS、DeviceNet、EtherNet/IP、CANopen 等方式;控制器与伺服驱动器通信可采用总线或数字式,如CANopen、EtherNet/IP、SERCOS等方式,多种通信接口使其应用扩展更广泛.2.2 EtherNet/IP通信Trio控制器与PC之间选用EtherNet/IP通信协议,它是一种工业以太网的应用协议.相比于其他控制系统中常见的总线结构,工业以太网的标准更规范、更通用,在远距离传输、组件成本、软硬件资源等方面也更有优势;而且可与普通网络通连,利用网络的在线监测,远程控制也很方便,已成为现场设备控制网络的发展趋势.EtherNet/IP协议采用Producer/Consumer通信模式,它不同于其他协议从源到点的指定模式,而是规定所有节点都可在同一时间读取来自同一个源的数据[5].这种模式的效率更高,实时性更好,适用于在造波现场由PC向控制器发送信号指令.Trio控制器面板配置有相关接口,通过网线即可实现连接;PC中基于Windows平台建立EtherNet/IP网络也较简单,为组网和数据交换提供了很大便利.2.3 SERCOS接口在吸收式造波中,Trio控制器与伺服驱动器之间的通信最重要,要求快速、稳定、误差最小地传输调整信号.而现有系统中多常用模拟接口,受噪声影响较大、传输速度缓慢、精度不高、线路连接复杂,不能满足吸收式造波高速、稳定的要求.基于数字化控制的设想,选用SERCOS数字接口.SERCOS接口是数字控制接口的唯一国际标准,具有较高精度的实时性和开放性,可保证快速建立数字连接、传送参数、精确控制和智能诊断的实现.SERCOS光纤网络结构如图2所示,其最主要的特点就是用光纤取代传统多轴控制系统中的普通电缆,是全数字式的网络通信方式,不会受到其他电气系统的干扰,对噪声的免疫能力很强,无信号漂移,传输精度高.其协议也规定了数据传输格式,对网络通信带宽的需求相对较低,通信速率大于 4,MB/s,通信周期小于1,ms[6].相比传统的模拟技术,SERCOS有效提高了工程速度,减少工程调试及维护时间,运行速度更快,精确度更高.图2 SERCOS光纤网络结构Fig.2 SERCOS fiber-optic network structureTrio控制器自带 SERCOS通信子板模块,选用的驱动器配置有 SERCOS接口,可以方便地用提供的线缆进行连接,实现SERCOS数字通信.3 程序设计在程序设计上采用混合编程调用的方法,采用C语言和 Fortran语言进行上位机程序设计,实现包括基本造波及吸收式造波的控制功能、系统的初始化设定、推波板的回零定位、目标波谱及造波参数的设定、数据统计分析及报警保护功能[7].控制执行机构由Trio控制器自带Trio Basic语言编写运动控制程序程实现.编程通过 Motion Perfect平台进行,然后下载到控制器中存储和运行.Trio控制器提供ActiveX功能,可以根据设备的需要在计算机中用高级程序语言进行二次开发;提供 OCX Component功能,可以自动检测控制器内的程序并与计算机中程序比较;计算机中有 VB、VC、C++等语言编写的程序时,可直接调用其运动函数,复制到Trio处理器中进行运算处理和控制,方便进行操作.4 实验利用本文设计的控制系统,在天津水运工程科学研究所的实验水槽中进行测试.水槽长 35,m,宽1,m,高 1.2,m,最大水深为 0.8,m.实验时,将模拟的波谱或波高数据由主程序输入,计算获得控制推波板运动所需的数字控制信号,经由运动控制程序,驱动机械装置带动推波板运动.推波板往复运动的位移决定波高,往复运动的频率决定波浪周期.板前设置2个波高传感器,运用两点法进行入反射分离,分别求得入、反射波高与周期[8].部分实验数据见表1.对实验数据的评价参考JTJ/T234—2001《波浪模型试验规程》,模拟规则波的平均波高和周期的允许偏差为±5%.结合表 1数据可以看出:非吸收式造波的波高数据受反射波的影响,误差很大;而吸收式造波的实验结果误差小,满足要求;本文设计的吸收式造波机的实验误差最小,精度最高.表1 各类型造波机造波实验数据Tab.1 Experimental wave data of various types of wave maker目标波高/m 目标周期/s 造波类型平均波高/m 波高偏差/% 平均周期/s 周期偏差/%设计吸收式 0.409 2.25 1.196 -0.33现有吸收式 0.383-4.25 1.209 0.75 0.4 1.2 0.4 1.4 0.6 1.4非吸收式 0.437 9.25 1.219 1.58设计吸收式 0.415 3.75 1.406 0.43现有吸收式 0.378 -5.50 1.413 0.93非吸收式0.441 10.25 1.435 2.50设计吸收式 0.612 2.00 1.394 -0.43现有吸收式 0.574-4.33 1.409 0.64非吸收式 0.667 11.17 1.433 2.36另外,程序可统计画出实验的波面过程图.其目标波高 0.4,m、周期 1.4,s的实验波面过程如图 3所示.由图 3可以看出:实验过程中,非吸收式造波的波面波动较大,在很长的实验时间范围内都难获得稳定的波高;现有吸收式造波机相比非吸收式造波,在波高稳定度上有明显的进步,进行吸收造波之后的波高变得比较稳定,但由于控制系统不够精确,与期望的波高还是有一定差距;而本文设计的吸收式造波机的波面最稳定,波高偏差最小.图3 各类型造波机造波实验波面过程图Fig.3 Experimental wavefront process map of various types of wave maker5 结语本文设计了吸收式造波机的运动控制系统,针对现有造波机的信号传输处理不及时、控制精度不理想问题进行改进.上位机程序设计采用混合编程的方式,对执行机构控制调用 Trio Basic语言,更好地实现了对推波板的运动控制.相比现有装置,信号传输与处理完全采用数字信号,使控制系统响应更快,运行更稳定.实验证明设计达到了预期效果.参考文献:[1]王先涛. 吸收式造波机理论[D]. 大连:大连理工大学,2002.[2]张亚群. 造波机的控制及其实现[D]. 武汉:武汉理工大学,2007.[3]班华,李长友. 运动控制系统[M],北京:电子工业出版社,2012.[4]郗志刚,周宏甫. 运动控制器的发展与现状[J]. 电气传动自动化,2005(3):12–16.[5]邓昌建. 工业以太网通讯协议和接口技术研究[D]. 成都:电子科技大学,2005.[6]李琰,徐殿国,戚佳金,等. SERCOS接口应用技术研究[J]. 伺服控制,2006(5):26-28.[7]张瑞波,王收军,朱国良. 基于VC6.0和FORTRAN语言的造波机控制软件的研究与开发[J]. 制造业自动化,2008(8):49-52.[8]张瑞波. 港工波浪模拟设备的研究[D]. 天津:天津理工大学,2008.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
于 位置 反 馈 ) 使伺 服 电机 运动 平稳 , 免 了丢步 现 , 避
象 ,提 高 了伺 服 系统 的控 制精 度 。
2 结束语
本文 研究 了基 于单 片机 的吸 收式 造波机 的硬 件 电路设 计 。根据 设 置 的波浪 参数 计 算造 波数 据 ,生 成造 波机 控制 信 号 ,发 送给 伺服 控 制器 ,控 制伺 服 电机 带动 造 波板 进行 造 波 ,而 伺服 电机 的编 码器 将
的转 速和转 向 ,实现 造波机 的运 动调 节数 字化 。控 制卡 接收 电机编 码器 的反馈 信号 ,实时 跟踪 造波 板 的运动 位置 ,构 成反 馈控制 系统 。波高 传感 器实 时 采集造 波板 前 的波高信 号 ,并 将该 信号 反馈 给计 算
图 2 波高传 感器 采集卡电路
12 控 制卡 的设 计 .
停 止运 行 。如 图 3 示 。对于 伺 服 电机 的故 障报警 、 所 复位 、使能 、急停 、限位 等控 制功 能 ,计算 机通 过
输 出高低 电平 到 7 HC3 3 4 7 锁存 器进 行 锁存 ,同样 从 该 锁存 器 出来 的信号 也需 要通 过T P 1 进行 光 电隔 I52 离后再 输 出到 伺服 驱动 器 中来 实现 相应 的 动作 。如
11 波 高采 集卡 的设计 .
本 系统采用 的 波高传 感器是 自主研 发 的电容式
波高 传感 器 。 该传 感器 的输 出信 号是数 字量 , S 为R 一
42 2 电平 , 经过 MC 4 6 换成 单片 机能 接受 的T L 38转 T
电平 。 片机 8 C 0 1 过 串行 口R 单 9 25通 XD引脚 接受该
关键词 :吸收式造波机 ;单片机 ;硬件 中图分类号 :T 3 P 1 2 文献标识码 B 文章编号: 0 — 1 4 2 1 ) l 1 2 1 9 0 ( 0 o 一0 1~0 0 3 o 6
0 引言
造 波机 是港 口工程 试验 中重要 的基 础设 施 ,用
机 ,提 取反射 波 以进行 吸 收式造 波 。造 波机控 制 系 1 Fra bibliotek訇 地
基于单 片机的吸收式造波机控制 系统硬件设计
Ha d a e d sgn o h bs bi g wa e m a e on r l g s s e s d on m c r w r e i f ea or n v k rc tol n y t m ba e u t i
、 l
了允 许范 围 时 ,接触 式 行程 开 关 即限
位 传 感器 发 出信 号 ,此 信号 送 入控 制 卡 。 了提高 系统 的可靠 性 , 强抗 干 为 增 扰 能 力 ,使控 制 系统 不 受外 部 电路 的 变 化 的影 响 ,需 要加 一 个光 电隔离 器
訇 似
T P 1 ,把 单 片机 所需 的数 字 信号 和 I5 2
张铁锋 ,王收军 ,陈广来
Z A i— n , H NGTef g WAN o 4 n CHE a gli e G Sh u u , N Gu n — a
( 天津理工大学 机械工程学院 ,天津 3 0 1 01 ) 9
摘
要 :介绍 了吸收式造波机控制系统的硬件 电路设计。系统的讲述了吸收式造波机控 制系统的伺服 控制系统、控制卡 、 水位采集卡的硬件结构组成。对造 波机如何采集传感器信号 ,控制伺 服电 机动作 ,实现 吸收式的造波进行 了具体的描述。
1 控制系统 的硬件 电路设计
对 造波机 运动 的控制 实 际上 是通 过对伺 服 电机 的控 制来 实现 的 。本 系统 采 用 I C 2 H型工 控机 , P 60
信 号 ,然 后把 接 收 到 的数 字 量 通 过 P1口发 送 到 7 HC 7 锁 存器 进行 锁存 , 计算 机通过 实 时的对 4 33 而
控制 卡主 要接 收限位 传感器 和编 码器脉 冲反馈
图 1控 制 系 统 结 构 图
信 号 。造 波板具 有一 定的 量程 ,当造波 板运 动超 出
收稿 日期 :2 0 —50 0 90 —8
作者简介:张铁锋 (9 4一) 18 ,男 ,天津人 ,在读硕士研究生 ,研究方向为机 电控 制及应用 。 【1] 第 3 10 2卷 第1 期 2 1 —1 00
该 锁存器 的检 测读 取到 相应 的数 字量 ,然后根 据工
控机 的计 算提 取反 射 波以进 行吸 收式 造波 。硬 件 电
路 如 图 2所 示 。
计算造 波机 控制信 号 。通 过工 控机 计算 出造 波板 的
运动轨 迹 ,然后 通过 8 D A接 口DA 2 0 位 / C1 3 转换 成 控 制 造波板 运动 的信 号 ,传送 给驱 动器 来控 制 电机
统 的结构 如 图 1 示 。 所
来 产生 不 同波长和 波高 的各种 形式 的 波浪 ,实现模 拟 自然 波浪 、 究海 浪对 港 口建筑 或船 舶影 响的 目 研
的 。吸收 式 造波机 具 有 消除 波浪 的二次 反 射功 能 , 更能真 实的 模拟海 洋 波浪的 运动 。其 控 制 系统 的硬 件 部分 主要 包括 :工控机 、D A卡 、控 制卡 、采 集 / 卡 、伺 服驱 动器 、限位 传感 器与 水位传 感器 等 。
限 位 传感 器 发 出的信 号 隔 离开 。该 信 号 通过 T P 1 ,经过 一 个六 位导 向 I5 2后 器 ,最后 进入 7 H 4 锁 存器 进行 锁存 ,当计算 机 4 C2 4 检 测 到该 锁存 器信 号时 切 断控制 信 号 ,使伺 服 电机
4 控 制 系统 框
7 H 7 锁 存器 ,将编 码器 将推 波 板实 时 的位移 变 4 C3 3 化 量 传输 到工 控微 机 中进 行编 码器 脉 冲计数 ,以获 得 数 字化 位置 信 息 ,实 时跟 踪推 波板 的位 置 ,保 证 推 波板 快 速 、 确地 定位 。 用 双 闭环控 制方 式 , 准 采 即 在 位 置反 馈 的 同时 ,也构 成 了速 度反 馈 ( 先级 次 优