计算机图形学第五章
计算机图形学基础教程

若直线既不满足“简取”也不满足 “简弃”的条件,直线必然与窗口相交, 需要计算直线与窗口边界的交点。交点 将直线分为两段,其中一段完全位于窗 口外,可“简弃”之。对另一段赋予交 点处的区域编码,再次测试,再次求交, 直至找到确定完全位于窗口内的直线段 为止。 实现时,一般按固定顺序左 (x=wxl),右(x=wxr)、下(y=wyb)、 上(y=wyt)求解窗口与直线的交点。
规格化设备坐标系是将设备坐标系规格化到(0.0, 0.0)到(1.0,1.0)的范围内而定义的坐标系。规格化 设备坐标系独立于具体输出设备。一旦图形变换到规格 化设备坐标系中,只要作一个简单的乘法运算即可映射 到具体的设备坐标系中。由于规格化设备坐标系能统一 用户各种图形的显示范围,故把用户图形变换成规格化 设备坐标系中的统一大小标准图形的过程叫作图形的逻 辑输出。把规格化设备坐标系中的标准图形送到显示设 备上输出的过程叫作图形的物理输出。有了规格化设备 坐标系后,图形的输出可以在抽象的显示设备上进行讨 论,因而这种图形学又称为与具体设备无关的图形学。
在计算机图形学术语中,窗口最初是指 要观察的图形区域。但是随着Windows的出
现,窗口概念已广泛用于图形系统中,泛指
任何可以移动,改变大小、激活或变为无效
的屏幕上的矩形区域。在本章中,窗口回归
到其的原始定义,是在观察坐标系中确定输
出图形范围的矩形区域。
5.4.3 窗视变换矩阵
窗口和视区的边界定义如图5-23所示,假 定把窗口内的一点P(xw,yw)变换为视区中的 一点P’(xv,yv)。这属于相对于任一参考点 的二维几何变换,变换步骤为:
码RC=C4C3C2C1。
wyt 窗口 0000 wyb
1001
1000
计算机图形学第五章曲线与曲面

2015/9/25
20
第五章:曲线与曲面
2015/9/25
21
第五章:曲线与曲面
2015/9/25
22
第五章:曲线与曲面
2015/9/25
23
第五章:曲线与曲面
双三次参数曲面的代数形式
双三次参数曲面片: 由两个三次参数变量(u, w)定义的曲面片,最常用。
其代数形式、矩阵表示分别是:
最简单的参数曲线,P(t)=P1+(P2-P1)t t∈[0, 1]; 端点为P1、P2
圆
第一象限内的单位圆弧的非参数方程表示为:
y 1 x2
其参数形式可表示为:
0 x 1
1 t2 x (t ) , 2 1 t
y (t )
2t 1 t 2
2015/9/25
推导略
2015/9/25
18
第五章:曲线与曲面
参数曲面的定义
一张矩形域上的参数曲面片
一张矩形域上由曲线边界包围具有一定连续性的点集面片,用双参数的
单值函数表示式为:x=x(u, w), y=y(u, w), z=z(u, w) u,w€[0,1] u,w为参 数。并可记为:p(u, w)=[x(u, w), y(u, w), z(u, w)]
2015/9/25
7
第五章:曲线与曲面
位置矢量、切矢量、法矢量、曲率和挠率
参数表示的三维曲线
有界点集,可写成一个带参数的、连续的、单值的数学函数x=x(t),
y=y(t),z=z(t),0≤t≤1
位置矢量
图5.1.1所示,曲线上任一点的位置矢量可表示为P(t)=[x(t), y(t), z(t)];其
计算机图形学第五章图形变换

第五章图形变换重 点:掌握二维几何变换、二维观察变换、三维几何变换以及三维观察变换。
难 点:理解常用的平移、比例、旋转变换,特别是复合变换。
课时安排:授课4学时。
图形变换包括二维几何变换, 二维观察变换,三维几何变换和三维观察变换。
为了能使各种几何变换(平移、旋转、比例等)以相同的矩阵形式表示,从而统一使用矩阵乘法运算来实现变 换的组合,现都采用齐次坐标系来表示各种变换。
有齐次坐标系齐次坐标系:n 维空间中的物体可用 n+1维齐次坐标空间来表示。
例如二维空间直线 ax+by+c=O ,在齐次空间成为 aX+bY+cW=0 ,以X 、Y 和W 为三维变量,构成没有常数项的 三维平面(因此得名齐次空间)。
点P (x 、y )在齐次坐标系中用P (wx,wy,w )表示,其中 W 是不为零的比例系数。
所以从 n 维的通常空间到 n+1维的齐次空间变换是一到多的变换,而其反变换 是多到一的变换。
例如齐次空间点P (X 、Y 、W )对应的笛卡尔坐标是 x=X/W 和y=Y/W 。
将通一地用矩阵乘法来实现变换的组合。
常笛卡尔坐标用齐次坐标表示时, W 的值取1。
采用齐次坐标系可以将平移、比例、旋转这三种基本变换都以相同的矩阵形式来表示,并统齐次坐标系在三维透视变换中有更重要的作用, 示形它使非线形变换也能采用线形变换的矩阵表式。
图形变换平移变换图示如图所示,它使图形移动位置。
新图 p'的每一图元点是原图形 p 中每个图元点在向分别移动Tx 和Ty 产生,所以对应点之间的坐标值满足关系式x'=x+Tx y'=y+Ty可利用矩阵形式表示成:[x' y' ] = : x y ] + : Tx Ty ]简记为:P'= P+T , T= : Tx Ty ]是平移变换矩阵(行向量)二堆几何变换1 1二维观察变換三维几诃变换平移变换 比例变换 陡转变换 对称变换 错切变换 仿肘变换 复合变换平移变换 比例变换 旋转变换 绕空间任意轴離转 对称变换 蜡切变换三维观察变5.1二维几何变换二维几何变换就是在平面上对二维点的坐标进行变换,从而形成新的坐标。
(完整版)计算机图形学基础第五章课后习题答案
5.3 试用中点Bresenham 算法画直线段的原理推导斜率在[-1,0]之间的直线段绘制过程(要求写清原理、误差函数、递推公式以及最终画图过程)。
解:原理:每次在最大位移方向上走一步,而另一个方向是走步还是不走步取决于误差项的判别。
∵斜率k 在[-1,0]之间∴x 为最大位移方向,每次在x 加1,而y 或减1或减0。
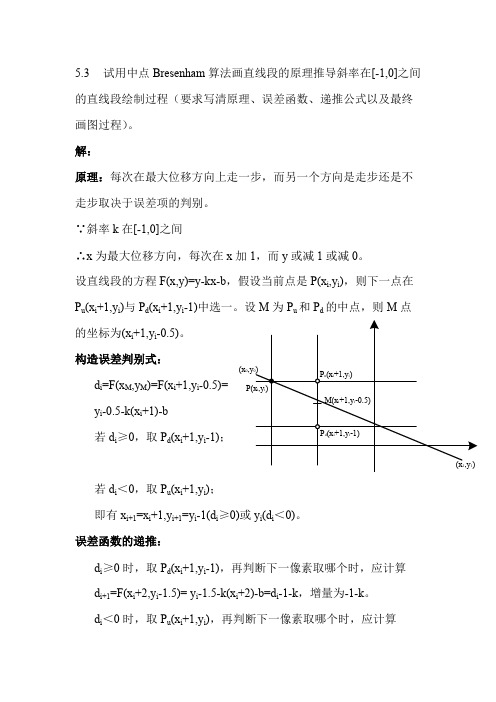
设直线段的方程F(x,y)=y-kx-b ,假设当前点是P(x i ,y i ),则下一点在P u (x i +1,y i )与P d (x i +1,y i -1)中选一。
设M 为P u 和P d 的中点,则M 点的坐标为(x i +1,y i -0.5)。
构造误差判别式:d i =F(x M ,y M )=F(x i +1,y i -0.5)=y i -0.5-k(x i +1)-b若d i ≥0,取P d (x i +1,y i -1);若d i <0,取P u (x i +1,y i );即有x i+1=x i +1,y i+1=y i -1(d i ≥0)或y i (d i <0)。
误差函数的递推:d i ≥0时,取P d (x i +1,y i -1),再判断下一像素取哪个时,应计算d i+1=F(x i +2,y i -1.5)= y i -1.5-k(x i +2)-b=d i -1-k ,增量为-1-k 。
d i <0时,取P u (x i +1,y i ),再判断下一像素取哪个时,应计算(x 0,yd i+1=F(x i+2,y i-0.5)= y i-0.5-k(x i+2)-b=d i-k,增量为-k。
判别式的初值:从(x0,y0)点出发,下一个像素的选取计算d0=F(x0+1,y0-0.5)= y0-0.5-k(x0+1)-b=-0.5-k取的是误差判别式的符号,因此可进行如下变换:D=d*2∆x∆x=x1-x0,根据选取的起点和绘制方向,∆x>0,因此,D与d同号。
计算机图形学_完整版 ppt课件
输入设备
键盘、鼠标 按钮盒、旋钮 跟踪球、空间球 操作杆 触觉反馈设备 数据手套、数据衣 数字化仪 扫描仪 触摸板 光笔 ……
硬拷贝设备
打印机 喷墨 激光 ……
绘图仪 台式 大型滚动传送式 ……
图形硬件系统组成模块示意图:
或称图形坐标系、用户坐标系、全局坐标系 如在世界坐标系中进行装配
观察坐标系(viewing coordinate)
对场景进行观察所对应的坐标系 对象经变换到该场景的一个二维投影——投影变换
规范化坐标系(normalized coordinate)
可使图形软件与特定输出设备的坐标范围无关 坐标范围:-1~1,或0 ~ 1 等等
在场景中对物体移动、旋转、缩 放、扭曲等,或转换模型坐标系
3D→2D,并对观察区域进行裁 剪和缩放
一种伪变换,对窗口上的最终输 出进行移动、缩放等
三维几何变换
可用4×4矩阵操作统一表示二维和三维几何变换
缩放、旋转、 对称、错切等
平移
投影
整体缩放
基本变换:平移、旋转、缩放
复合变换:可由平移、旋转、缩放和其他变换的矩阵乘积 (合并)形成。
图元的绘制、显示过程
顶点 法向量、颜色、纹理… 像素
图元操作、像素操作 光栅化(扫描转换)
像素信息 帧缓存 显示器
调用底层函数,如 setPixel (x,y);将当 前像素颜色设定值存 入帧缓存的整数坐标 位置(x,y)处。
图元描述与操作
几何图元由一组顶点(Vertex)描述 这一组顶点可以是一个或是多个。每个顶点信息二维或 三维,使用 2~4 个坐标。顶点信息由位置坐标、颜色 值、法向量、纹理坐标等组成。
计算机图形学第五章课程提纲
5.1 图形几何变换基础5.1.1 规范化齐次坐标齐次坐标就是用n +1维矢量表示n 维矢量,第n +1维称为齐次坐标位,第n +1维为1时为规范化齐次坐标。
有了规范化齐次坐标后,二维变换可形成一个通式。
[x ′ y ′ 1]=[x y 1]∙TT 为3×3矩阵。
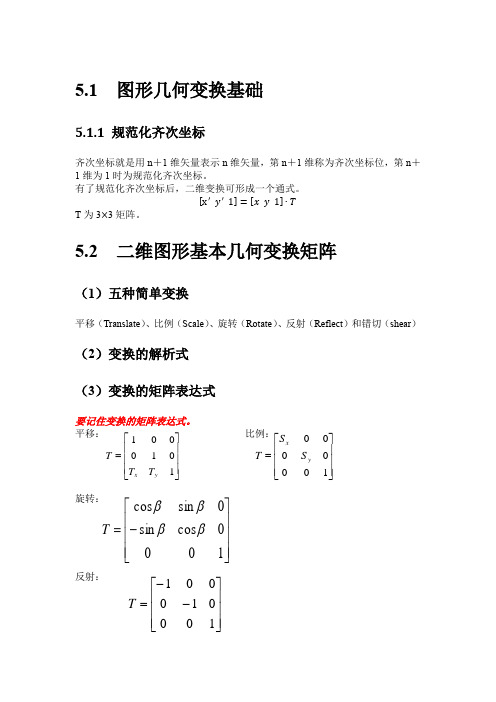
5.2 二维图形基本几何变换矩阵(1)五种简单变换平移(Translate )、比例(Scale )、旋转(Rotate )、反射(Reflect )和错切(shear )(2)变换的解析式(3)变换的矩阵表达式要记住变换的矩阵表达式。
平移: 比例:旋转:反射: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1010001y x T T T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1000000y x S S T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=1000cos sin 0sin cos ββββT ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100010001T错切:沿x 的错切: x ′=x +cyy ′=y沿y 的错切:x ′=xy ′=bx +y(4)多边形的变换只对顶点变换。
5.3 二维复合变换复合变换的变换矩阵是简单变换矩阵的乘积相对于点的复合变换例5-1:相对于参考点Q 的旋转变换T1: 平移(-Qx, -Qy ),把Q 平移到原点T2: 绕原点旋转β角T3:平移(Qx, Qy ),把原点平移到Q相对于直线(轴)的复合变换例5-2:相对于直线y=kx+b 的复合变换T1: 平移(0, -b ),使直线过原点T2: 绕原点旋转-β角,使直线与x 轴重合T3:根据x 的反射变换T4: 绕原点旋转β角T5: 平移(0, b )⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1000101c b T n T T T P T P P 21'⋅⋅=⋅=二维仿射变换由五种简单变换或其复合变换构成的变换即仿射变换(Affine Transformation )。
CTransform 类的用法见实验二中“test”文件夹中的程序5.4 二维图形裁剪5.4.1 图形学中用到的几种坐标系世界坐标系,用户坐标系,观察坐标系,屏幕坐标系,设备坐标系5.4.2 窗口与视区5.4.3 窗视变换5.5 Cohen -Sutherland 直线裁剪算法 算法原理C3,C2,C1,C0 上 下 右 左[][]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅==10011''3,23,12,22,11,21,1a a a a a a y x y x算法实例。
投影变换(计算机图形学)资料
2009-2010-2:CG:SCUEC
10
正投影之三视图
当投影面与某个坐标轴垂直 时,得到的空间物体的投影 为正投影(三视图)
1. 三视图分为正视图、侧视图
和俯视图.
2. 对应的投影平面分别与x轴, y 轴,z轴垂直。
三视图
三视图常用于工程制图,因为在其上可以测量距离和
角度。但一个方向上的视图只反映物体的一个侧面,只有 将三个方向上的视图结合起来,才能综合出物体的空间结 构和形状。
2009-2010-2:CG:SCUEC
4
投影变换的概念
近平面
远平面 Z
X
投影平面 V′ U′
窗口 X′ Y′
Y 投影线
视点
透视投影
视点:三维空间中任意选择的一个点,亦称为投影中心 投影平面:不经过视点的任意一个平面 投影线:从视点向投影平面的引出的任意一条射线
2009-2010-2:CG:SCUEC
x
xq zc
yq
0
0 zc
xc yc
0 0
y z
xp
xq q
,
yp
yq q
q 0
0
1
zc
1
2009-2010-2:CG:SCUEC
8
平行投影
平行投影可以看成投影中心移向无穷远时的极限情况。
设给定的投影方向为( xd , yd , zd )。在要投影的对象附近任取一点
(xs , ys , zs),以此点为起点作一射线,其指向是投影方向的反方向,
oz 和 轴的单位方向向量为 (a11, a12 , a13 ) 、 (a21, a22 , a23 ) 和
(a31, a32 , a33 ) ,那么从坐标系oxyz到 o xyz 的变换是
计算机图形学(第五章曲线曲面 [恢复])
![计算机图形学(第五章曲线曲面 [恢复])](https://img.taocdn.com/s3/m/d3ea0dd649649b6648d74770.png)
早期手工绘图
4
工业产品的形状大致上可分为两类: • 一类是仅由初等解析曲面例如平面、圆柱 面、圆锥面、球面、圆环面等组成,大多 数机械零件属于这一类。 • 第二类以复杂方式自由地变化的曲线曲面 即所谓自由曲线曲面组成,如飞机、汽车、 船舶的外形零件。自由曲线曲面因不能由 画法几何与机械制图表达清楚,成为摆在 工程师面前首要解决的问题。
22
Bezier曲线
23
Bezier曲线生成
• Bezier定义
– 在空间给定n+1个点P0,P1,P2,…,Pn,称下列参数 曲线为n次的Bezier曲线
BEZi ,n ( t ) C t ( 1 t )
i i n
n i
,t [ 0,1 ]
n! C i !( n i )!
第三章 曲线与曲面
1
曲线曲面
• 从卫星的轨道、导弹的弹道,到汽车和飞 机等的外形,直至日常生活中的图案和花 样设计
2
一类是曲线可以用一个标准的解析式来表示,称为 曲线的方程等。 第二类曲线的特点是,不能确切给出描述整个曲线 的方程,它们往往是由一些从实际测量得到的一系列 离散数据点来确定。这些数据点也称为型值点。
两点的直线段的参数
x x0 ( x1 x0 )t , P P0 ( P1 P0 )t y y0 ( y1 y0 )t ,
t 0,1
参数表示比非参数表示更优越
更大的自由度
参数方程的形式不依赖于坐标系的选取,具有形
状不变性;
在参数表示中,变化率以切矢量表示,不会出现
5
• 对于复杂曲线和曲面的绘制方法
先确定一些满足条件的、位于曲线上的坐标点 ,然后借用曲线板把这些点分段光滑地连接成曲 线。绘出的曲线的精确程度,则取决于所选择的 数据点的精度和数量,坐标点的精度高,点的数 量取得多,则连成的曲线愈接近于理想曲线。
第五章 计算机图形学 ppt课件

图形和图像的主要区别主要有4个方面: 1、数据来源不同
图像数据来自客观世界,图形数据来自主观世界。 2、处理方法不同
图像处理方法包括几何修正、图像变换、图像增强、 图像理解、图像识别等。图形处理方法包括几何变换 、裁剪、隐藏线、隐藏面消除、曲线和曲面拟合、明 暗处理、纹理产生等。
术等。
2020/5/12
二、计算机图形学的起源和发展
1、计算机图形学的起源和发展
• 1950年,第一台图形显示器作为美国麻省理工学院(MIT) 旋风I号(Whirlwind I)计算机的附件诞生。
• 1958年美国Calcomp公司发明了滚筒式绘图仪,GerBer 公司研制出了平板式绘图仪。
• 1962年,MIT林肯实验室的I.E.萨瑟兰德(I.E.Sutherland) 发表了一篇题为“Sketchpad:一个人-机通信的图形系统 ”的博士论文,首次使用了计算机图形学(Computer Graphics)这个术语。
2020/5/12
3. 计算机图形学的研究领域和目标
(1) 图形系统的硬件设备,如图形处理器、图形输入输出设 备,特别是图形显示和打印设备; (2) 基本图元的生成技术,如直线、园狐、曲线和曲面等; (3) 图形变换技术,包括二维几何变换、三维几何变换和投 影变换等; (4) 人机交互绘图技术,如窗口技术、橡皮筋技术等; (5) 图形运算和处理技术,如图形的裁剪、填充等; (6) 实体造型技术和真实图形的表示,如消隐技术、色彩技
2020/5/12
四、图形和图像的区别和联系
计算机图形学是指将点、线、面、曲面等实体生 成物体的模型存放在计算机里,并可进行修改、处理 、操作和显示的一门科学。图形含有几何属性,或者 说更强调场景的几何表示,是由场景的几何模型和景 物的物理属性共同组成的。
计算机图形学课件第五章

计算机图形学
三维几何变换
绕任意轴的旋转变换(详见教材P371)
已知空间有一任意轴AB,A点坐标为(XA,YA,ZA), AB的方向数为(a,b,c)。空间一点P(x,y,z)绕 AB逆时针旋转θ角后变成P’(x’,y’,z’)。若旋转变换矩 阵为Rab,则有
[x’ y’ z’ 1]=[x y z 1]*Rab 下面讨论如何求出Rab的表达式。 基本思想:先平移坐标系,使A点成为新坐标系AX’Y’Z’的 原点;再使AB分别绕x’轴和y’轴旋转适当角度,使AB与z’ 轴重合,那么绕AB转θ角就变成了绕z’轴旋转θ角;最后, 再作逆变换,使AB回到原来的位置。
P P T
x P y
x P y
t x T t y
x x t x y y ty
计算机图形学
点的基本变换
旋转变换
–
–
点P(x,y,)的极坐标表示 x=rcosφ,y=rsinφ 绕坐标原点旋转角度 (逆时针为正,顺时针为负)
x1 y 1 x2 y2 x3 x n y3 y n
或
对图形的几何变换就可以归结为对点的变换
计算机图形学
二维图形的变换
点的基本变换 平面图形的变换 平面图形变换的齐次坐标表示 复合变换及变换的模式 其它变换
计算机图形学
一、点的基本变换
平移变换
变换的数学基础
u x U u y u z
vx V v y vz
矢量
–
矢量和
u x vx U V u y v y u z vz
计算机图形学第五章 PPT

下面我们仅介绍如何在线段P1P2上求离P1最 远的可见点 (求P2最远的可见点同p1) ,其 具体步骤如下:
① 测试P2是否在窗口内,若是,则P2就是 离P1最远的可见点,结束。否则,进行下一
(如图中的EF就是这种情况,它 使QL=0,DL>0和QR=0,DR>0。这 时由于EF和x=xL及x=xR平行,故不 必去求出EF和x=xL及x=xR的交点, 而让EF和y=yT及y=yB的交点决定直 线段上的可见部分。)
E A
B F
思考:前面几种裁剪直线段 算法的裁剪窗口都是矩形区 域,如何推广裁剪区域呢?
中点分割裁剪算法
基本思想: 与前一种Cohen-Sutherland算
法一样首先对线段端点进行编码,并把 线段与窗口的关系分为三种情况: 全部可见、完全不可见和线段部分可见。 对前两种情况,进行一样的处理。对于 第三种情况,用中点分割的方法求出线 段与窗口的交点。
问:算法为什么可行?会不会 无限循环、不断二分?
N·(P(t)-A)>0
参数化算法(Cyrus-Beck)
k条边的多边形,可见线段参数区间的解: Ni·(p(t)-Ai)>=0, i=0,…,k, 0≤t ≤1. 即:Ni·(P1-Ai)+ Ni·(P2-P1) t>=0 可得:
NN i •i•P2P2PN1Pi1•0P2 0 tP1t0N N N N ii ••ii••NPP12iPP12AP1iPAP21iP1
yT为终边。 yT为始边。
Liang-Barsky算法:交点计算
求出P0P1与两条始边的交点参 数t0, t1 , 令 tl=max(t0 ,t1,0),则tL即为 三者中离p1最近的点的参数
计算机图形学课件——fifth1PPT

其中变换矩阵: 1 0 0
T
0
1
0
0 0 1
11.06.2020
21
对称Y轴变换的几何表示见下图
11.06.2020
22
3. 对称于原点 当图形对X轴和Y轴都进行对称变换时,即得相
对于坐标原点的对称变换。这一变换前后点坐标之 间的关系为:
x' x
y'
y
写成齐次坐标矩阵形式为:
1 0 0
11.06.2020
31
5.1.6 错切变换 错切(shear)变换是轴上点不动,其它点沿平行于
此轴方向移动变形的变换。错切变换也称为剪切、错位 或错移变换。常用的错切变换有两种:改变x坐标值和 改变y坐标值。
可以分解为平移、旋转、对称于坐标轴等变换的组合。 首先平移直线经过坐标原点,而后将直线绕坐标原点 旋转至同某一坐标轴重合,做对称于坐标轴的变换, 最后反向旋转和反向平移将直线置回原处。
如下图所示,平移直线经过坐标原点需要在Y轴方 向上移动距离b,然后将直线绕坐标原点旋转至同Y轴
重合,设旋转角度为 ,两步的变换矩阵分别为:
11.06.2020
28
1 0 0
T1
0
1
0
0 b 1
cos sin 0
T2 sin cos 0
0
0 1
1 0 0
做对称于Y轴的对称变换,其变换矩阵为:T3
0
1
0
0 0 1
最后反向旋转和反向平移将直线置回原处,其变换矩阵分别
为:
cos)( sin )( 0 co ssin0
1 0 0
T4sin )( cos)(0sin co s0
T5
计算机图形学_第五章

方阵 单位矩阵:对角线元素为1,其他元素为0。记作 I n
式7-5
转置 M的转置记作 M
T
,它的列由M的行组成。即
式7-6 式7-7
MT ij M ji
对于向量来说,转置将行向量变成列向量
在书面表达中列向量通常写为
式7-8
矩阵乘法 矩阵乘法的计算前提
nc
A的列数和B的行数相等。一个 矩阵的结果是一个 矩阵,记作AB
r n r c
矩阵A乘以一个
矩阵乘法
矩阵乘法的计算 若矩阵A是 矩阵, 矩阵B是 绩AB的计算方法如下:
r n
nc
矩阵,则它们的成
矩阵乘法
矩阵乘法
矩阵乘法的注意事项
任何矩阵M乘以方阵S,矩阵维数不变;如S是单位矩阵,则不变,即: MI=IM=M 矩阵乘法不满足交换律
矩阵乘法满足结合律,即(AB)C=A(BC) 矩阵乘法满足与标量或者向量的结合律,即: (kA)B= k(AB)= A(kB) (vA)B= v(AB) 矩阵积的转置相当于先转置然后以相反的顺序乘:
式5-8
d
ba
d x d yd z
2 2
2
2
式5-9
(bx ax ) (by a y ) (bz az )
2
2
式5-10
向量点乘 运算法则 向量点乘的结果为一个标量。
a1 b1 a b 2 2 ... ... a1b1 a2b2 ... an 1bn 1 anbn a n 1 bn 1 an bn
a 图4-3
b 图4-4
向量运算 线性代数与几何 符号约定 零向量 负向量 向量大小(长度或模) 标量与向量的乘法 标准化向量 向量的加法和减法 距离公式 向量点乘 向量叉乘 线性代数公式
计算机图形学习题参考答案(完整版)
计算机图形学习题参考答案第1章绪论1、第一届ACM SIGGRAPH会议是哪一年在哪里召开的?解:1974年,在Colorado大学召开了第一届SIGGRAPH年会。
2、计算机图形学之父是谁?解:Sutherland3、列举一些计算机图形学的应用领域(至少5个)。
解:计算机辅助设计、图示图形学、计算机艺术、娱乐、教学与培训、可视化、图像处理、图形用户界面等。
4、简要介绍计算机图形学的研究内容。
解:(1)图形的输入。
如何开发和利用图形输入设备及相关软件把图形输入到计算机中,以便进行各种处理。
(2)图形的处理。
包括对图形进行变换(如几何变换、投影变换)和运算(如图形的并、交、差运算)等处理。
(3)图形的生成和输出。
如何将图形的特定表示形式转换成图形输出系统便于接受的表示形式,并将图形在显示器或打印机等输出设备上输出。
5、简要说明计算机图形学与相关学科的关系。
解:与计算机图形学密切相关的学科主要有图像处理、计算几何、计算机视觉和模式识别等。
计算机图形学着重讨论怎样将数据模型变成数字图像。
图像处理着重研究图像的压缩存储和去除噪音等问题。
模式识别重点讨论如何从图像中提取数据和模型。
计算几何着重研究数据模型的建立、存储和管理。
随着技术的发展和应用的深入,这些学科的界限变得模糊起来,各学科相互渗透、融合。
一个较完善的应用系统通常综合利用了各个学科的技术。
6、简要介绍几种计算机图形学的相关开发技术。
解:(1)OpenGL。
OpenGL是一套三维图形处理库,也是该领域事实上的工业标准。
OpenGL独立于硬件、操作系统和窗口系统,能运行于不同操作系统的各种计算机,并能在网络环境下以客户/服务器模式工作,是专业图形处理、科学计算等高端应用领域的标准图形库。
以OpenGL为基础开发的应用程序可以十分方便地在各种平台间移植;OpenGL与C/C++紧密接合,便于实现图形的相关算法,并可保证算法的正确性和可靠性;OpenGL使用简便,效率高。
计算机图形学 第五章 真实感图形 (1)

m
矢量积形式
I K a I a I i ( K d ( N , L) k s ( N , H ) )
n i 1
m
20
Phong模型
Phong模型的光照明效果(Utah Teapot)
21
Whitted整体光照明模型
局部光照明模型的局限
仅考虑从光源直接发出的光线对物体表面光亮度的 贡献 没有考虑光线在物体之间的相互反射和透射 可模拟现实世界中 景物表面之间的 镜面反射和透射 现象
镜面反射和规则透射示例
24
Whitted整体光照明模型
Whitted整体光照明模型
I I c k s I s kt I t
Ic:由光源直接照射在表面上引起的反射光亮度 Is:沿V的镜面反射方向r入射到表面上的环境光在表面上产生的 镜面反射光 It:沿V的规则透射方向t入射到表面上的环境光通过透射在表面 上产生的规则透射光 ks:表面的镜面反射率 kt:表面的透射率
8
Lambert漫反射模型
漫反射光是物体表面对入射光线朝各个方向的 均匀反射
大小只与入射光的光亮度和入射方向有关 与漫反射光的反射方向无关
光源 N
均匀反射的光线
9
Lambert漫反射模型
漫反射光亮度和光源入射角(入射光线和表面 法向量的夹角)的余弦成正比
I d K d I e cos
Whitted模型:整体光照明模型
22
Whitted整体光照明模型
假设从某一观察方向V所观察到的物体表面某点 P的光亮度的贡献来自于三个方面:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Liang-Barsky算法
* 写入图形学教科书的唯一中国人的 算 法 * Communication of ACM的论文 梁有栋教授(浙江大学数学系教授)的二 三事 Liang-Barsky算法 几何连续理论
基本思想: 把二维裁剪化为一维裁剪问 题,并向x(或y)方向投影 以决定可见线段。
(xR,yT )
)
直线段裁剪
裁剪线段与窗口的关系:(1)线段完全可 见;(2)显然不可见;(3)其它 提高裁剪效率: 快速判断情形(1)(2), 对于情形(3),设法减 少求交次数和每次求 交时所需的计算量。
直接求交算法
直线与窗口边都 写成参数形式, 求参数值。
Cohen-Sutherland裁剪
裁剪可以在世界坐标系中进行,即相对于窗口进行;也可 以把对象变换为设备坐标之后相对于视区进行。前者可以把不
在窗口范围内的部分剪掉, 避免了不必要的变换处理;后者在
设备坐标系中裁剪易于用硬件实现。 裁剪处理的基础是:点在窗口区域内外的判断以及计 算图形元素与窗口区域边界的交点。其原理虽然简单,但涉及 的图形元素多, 提高裁剪速度是算法应考虑的重要问题。以下
无限循环、不断二分? 因为屏幕像素是有限的,一般 计算次数不会太多,而且算法 思想是用取中点的方法最后在 误差允许的范围内去逼近真正 的与裁剪矩形边的交点。
下面我们仅介绍如何在线段P1P2上求离P1最 远的可见点 (求P2最远的可见点同p1) ,其 具体步骤如下: ① 测试P2是否在窗口内,若是,则P2就是 离P1最远的可见点,结束。否则,进行下一 步。 ② 测试P1P2是否在窗外同侧,若是,P1P2 全部不可见,结束。否则,进行下一步。 ③ 取P1P2的中点Pm,若PmP2在窗外同侧,舍 去,剩余段以P2代替Pm重复第二步。否则, 以P1代替Pm重复第二步。直到线段不能再分 为止。
对象也可以是规则形体,也可以是 不规则形体。本章重点介绍二维裁 剪,三维裁剪涉及到后面章节三维 消隐等内容,后面再简要介绍。
5.2 二维裁剪
5.2.1 直线段裁剪
直接求交算法 Cohen-Sutherland算法 中点分割算法 Liang-Barskey算法 参数化裁剪算法
5.2.2 多边形裁剪
Sutlerland_Hodgman算法 Weiler-Athenton算法
第五章 裁剪
在进行图形的描述中总是尽可能全面地 获取它的有关信息,而在进行图形显示与 研究过程中往往对其中某些部分更感兴趣 和需要,这就涉及到图形裁剪概念与内容。 本章我们将讨论图形系统中重要 的部分——裁剪,研究有关裁剪的算法。
第五章 裁剪
教学学时:6课时 教学目的与要求: 让学生初步了解裁剪的定义,掌握对直线 段裁剪的一些基本算法,掌握简单的对多 边形裁剪的算法,掌握算法的理论原理, 能够分析基本算法的优缺点。 教学重点:Cohen-Sutherland算法,中点 分割算法,梁友栋—Barsky算法,参数化 算法,Sutlerland_Hodgman算法。
若x 0 x xL为始边,x xR为终边。 若x 0 x xL为终边,x xR为始边。 若y 0 y y B为始边,y yT 为终边。 若y 0 y y B为终边,y yT 为始边。
Liang-Barsky算法:交点计算
第五章 裁剪
5.1
裁剪概述 5.2 二维裁剪
5.2.1 直线段裁剪 5.2.2 多边形裁剪
5.1 裁剪概述
在使用计算机处理图形信息时,遇到的情况往往是计算机内
部存储的图形比较大,而屏幕显示只是图的一部分。例如,虽然
计算机内部可以存储全国地图,但是,如果把全国地图整幅显示 在屏幕上,则不能看到各地局部的细节。这时,可以使用缩放技
参数化算法(Cyrus-Beck)
k条边的多边形,可见线段参数区间的解: Ni·(p(t)-Ai)>=0, i=0,…,k, 0≤t ≤1. 即:Ni·(P1-Ai)+ Ni·(P2-P1) t>=0 可得:
Ni P1 Ai Ni P2 P1 0 t N P P i 2 1 Ni P1 Ai Ni P2 P1 0 t Ni P2 P1 Ni P2 P1 0 Ni P2 P1
E A
B F
Liang-Barsky算法
当Qi
=0时 若Di <0 时,线段不可见 (如图中AB,有QR=0,DR<0) 若Di >0 时, 分析另一D,
E
A
(如图中的EF就是这种情况,它 使QL=0,DL>0和QR=0,DR>0。这 时由于EF和x=xL及x=xR平行,故不 必去求出EF和x=xL及x=xR的交点, 而让EF和y=yT及y=yB的交点决定直 线段上的可见部分。)
介绍直线段裁剪算法及多边形裁剪算法。
最简单的裁剪方法是把各种图形扫描 转换为点之后,再判断各点是否在窗内。 但那样太费时,一般不可取。这是因为有 些图形组成部分全部在窗口外,可以完全 排除,不必进行扫描转换。所以一般采用 先裁剪再扫描转换的方法。
5.2 二维裁剪
裁剪算法有二维的和三维的,裁剪
5.2.1 直线段裁剪
直线段裁剪算法是复杂图元裁 剪的基础。复杂的曲线可以通过折 线段来近似,从而裁剪问题也可以 化为直线段的裁剪问题。所以本章 重点讨论直线段的裁剪算法。算法 一般取的裁剪多边形都是矩形,有 些特殊的算法采用任意多边形裁剪。
点的裁剪
图形裁剪中最基本的问题。 假设窗口的左下角坐标为 (xL,yB),右上角坐标为 (xR,yT),对于给定点P(x,y), 则P点在窗口内的条件是要 满足下列不等式: (xL,yB xL <= x <= xR 并且yB <= y <= yT 否则,P点就在窗口外。
设要裁剪的线段是P0P1。 P0P1和 窗口边界交于A,B,C,D四点,见图。 算法是从A,B和P0三点中找出最靠近 的P1点,图中要找的点是P0。从C,D 和P1中找出最靠近P0的点。图中要 找的点是C点。那么P0C就是P0P1线段 上的可见部分。
Liang-Barsky算法
线段的参数表示 x=x0+t△x y=y0+t△y 0<=t<=1 △x=x1-x0 △y=y1-y0 窗口边界的四条边分为两类:始边和终边。
术,把地图中的局部区域放大显示。在放大显示一幅图形的一部
分区域时,必须确定图形中哪些部分落在显示区之内,哪些部分 落在显示区之外,以便显示落在显示区内的那部分图形。这个选
择处理过程称为裁剪。在进行裁剪时,画面中对应于屏幕显示的
那部分区域称为窗口。一般把窗口定义为矩形,由上、下、左、 右四条边围成。裁剪的实质就是决定图形中哪些点、线段、文字 以及多边形在窗口之内。
令ti= Ni·(P1-Ai)/[Ni·(P2-P1)]
参数化算法(Cyrus-Beck)
Ni·(P2-P1) =0-> 平行于对应边。 此时判断Ni·(P1-Ai) 若Ni·(P1-Ai) <0->P1 P2在多边形外侧->不可见, 若Ni·(P1-Ai) >0->P1P2在多边形内侧->继续其它 边的判断
中点分割裁剪算法
基本思想: 与前一种Cohen-Sutherland算 法一样首先对线段端点进行编码,并把 线段与窗口的关系分为三种情况: 全部可见、完全不可见和线段部分可见。 对前两种情况,进行一样的处理。对于 第三种情况,用中点分割的方法求出线 段与窗口的交点。
问:算法为什么可行?会不会
中点分割裁剪算法
中点分割裁剪算法是对Cohen-Sutherland 直线段裁剪算法的改进。 在Cohen-Sutherland 直线段裁剪算法中, 为了避免求直线段与窗口 边界的交点, 用不断对分线段的方法排斥线段 在窗口外的部分, 最后求出离线段端点最远的 可见点(所谓可见点就是线段落在窗口内的点), 若这两点存在, 则这两点就是线段P1P2的可见线 段端点。
Pm b P2 a P1 P1 P2 Pm c P1 P2
图中,对线段a,求离P1最远的可见点算法在第一步 结束;对线段b,算法在第二步结束;对线段c,算法进
入第三步后开始对分线段,最终重复第二步结束。
中点分割裁剪算法的优点
取中点的目的是用中点逼近线段与
边界的交点。这种方法没有求交计 算,适合于没有乘除运算的计算机, 易于用硬件实现。
求出P0P1与两条始边的交点参 数t0, t1 , 令 tl=max(t0 ,t1,0),则tL即为 三者中离p1最近的点的参数 求出p0p1与两条终边的交点参 数t2, t3, 令 tu=min(t2,t3,1) ,则tU即为 0 三者中离p0最近的点的参数 若tu > tl,则可见线段区间 [tl , tu]
图 5.1 区域划分及编码
图 5.2 区位码各位含义
编码的思想在图形学中非常重要。 Sutherland:Coons, 图灵, IEEE 计算机 先驱奖。
Cohen-Sutherland算法
一旦给定所有的线段端点的区 域码,就可以快速判断哪条直 线完全在剪取窗口内,哪条直 线完全在窗口外。所以得到一 个规律:
B F
思考:前面几种裁剪直线段
算法的裁剪窗口都是矩形区 域,如何推广裁剪区域呢? 参数化算法(Cyrus-Beck)是 研究使用凸多边形区域作为 裁剪区域进行二维直线段裁 剪的算法。
参数化算法(Cyrus-Beck)
考虑凸多边形区域R 和直线段P1P2 P(t)=(P2-P1)*t+P1 设A是区域R的边界 上一点,N是区域边 界在A点的内法线向 量