轨检车波形图分析及应用(新)
轨检车波形图分析及应用(新)
轨向正负:顺轨检车正向,轨向向左为正,向右为负;
水平正负:顺轨检车正向,左轨高为正,反之为负;
曲率正负:顺轨检车正向,右拐曲线曲率为正,左拐曲线 曲率为负;
车体水平加速度:平行车体地板,垂直于轨道方向,顺轨 检车正向,向左为正;
车体垂向加速度:垂直于车体地板,向上为正;
2021/5/27
25
2021GJ-4型轨检车提供IIC文件包括 :一、二、 三、四级超限报告表,区段总结报告、每公里 扣分、曲线报告、TQI等数据。
2021/5/27
36
轨检车提供一、二、三、四级超限报告表:图中有超限地点、超限类型 、超限峰值、长度、速度(km/h)、线形(直/缓/圆)、级别。 检测标准:一级超限,每处扣1分;二级超限,每处扣5分;三级超限, 每处扣100分;四级超限,每处扣301分。
2021/5/27
20
轨距变化率:由相隔2.5米的两点实际测量的轨距差除以米 得到(车轴定距), 轨距变化率直接影响轮轨接触几何,危
机行车安全和舒适性。
2021/5/27
21
横加变化率:由相隔18米的两点实际测量的横向加 速度差除以18米得到(车辆定距离)。
2021/5/27
22
曲率变化率:由相隔18米的两点实际测量的曲率差除以18米 得到(车辆定距离)。曲率是以列车走行的单位距离轨道的 方向角的变化表示。
2021/5/27
14
2021/5/27
15
轨距:两股钢轨轨面下16mm范围内,两股钢轨作 用边之间的最小距离。
2021/5/27
16
2021/5/27
17
曲率的检测原理 :
曲率为一定弦长曲线轨道(如30米)对应 的圆心角a,即度/30m、度数大、曲率大 、半径小。反之,度数小、曲率小、半径 大。轨检车通过曲线时、测量轨检车每通 过30米后车体方向角的变化值,计算出轨 检车通过30米后的相应圆心角的变化值, 即曲率。曲率、曲率变化率是检测曲线圆 顺度的波形通道。能正确判断曲线正矢连 续差和曲线的圆顺度。曲率变化率的波形 通道有突变,正矢肯定不好。
轨检车波形图分析及应用大全从零开始共78页
5、教导儿童服从真理、服从集体,养 成儿童 自觉的 纪律性 ,这是 儿童道 德教育 最重要 的部分 。—— 陈鹤琴
31、只有永远躺在泥坑里的人,才不会再掉进坑里。——黑格尔 32、希望的灯一旦熄灭,生活刹那间变成了一片黑暗。——普列姆昌德 33、希望是人生的乳母。——科策布 34、形成天才的决定因素应该是勤奋。——郭沫若 35、学到很多东西的诀窍,就是一下子不要学很多。——洛克Leabharlann 轨检车波形图分析及应用大全从零开 始
1、纪律是管理关系的形式。——阿法 纳西耶 夫 2、改革如果不讲纪律,就难以成功。
3、道德行为训练,不是通过语言影响 ,而是 让儿童 练习良 好道德 行为, 克服懒 惰、轻 率、不 守纪律 、颓废 等不良 行为。 4、学校没有纪律便如磨房里没有水。 ——夸 美纽斯
轨检车波形图应用情况分析

均可通过精细化 的市场调研 ,确定合理
( 3 ) 在 现有 场 地 内尽 量 增 建 仓 储 设 运 行机 制后 , 相 应 配套 完善 。
在产业经济升级转型、社会分工协
( 4 ) 适 当调 整 内部 铁 路 装 卸 线 设 施 作精细化程度提高 、资源整合程度不断 布局 , 装 卸作业 线 可深 入仓 库 内 , 拆 除部 加深的时代背景下 ,建设无锡铁路城市 是适 应 经济 社会 发 展 、 充 分线路腾出场地搭建仓储设施 ,设置增 物 流 配送 中心 , 分 发 挥铁路 运输 优 势 、更 好 地为 城 市生
送 中心 ,可 以有效整合货场周边依托铁 交 易 区 、 业务 办 理 去 、 维修服务区 、 生 活 通及 环境 的影 响程度 大 为改 善 ,研究 做
好 交通 配套 和车 辆疏 导工作 。 路货运的中小型储货企业 ,集中提供城 服 务 区等 。 ( 2 ) 在 货场 外 围整 合用 地 , 集 中配套 ( 1 o ) 对于 物流其他环 节所需 的设施 , 市 物资 流通 配送 业 务 ,为城 市用 地 的清 理 整治 创造 条件 。 同时 , 对无 锡 南货 场 中 建 设仓 储物 流场 地 。 的一 些 干扰 城市 交通 、环 保 的货 运业 务 按 照服 务 于各 种形 态 的大卖 场 、 储货 进行外迁,从而为美化净化城市环境做 施 , 出贡献 。通 过建 设铁 路城 市 物流 配送 中 企业等需求设置立体仓库 ,增加仓储能 4 结论 意见 心 等一 系列 调整 工作 ,将 有 效提 升铁 路 力 。 在 物流 市场 的竞 争力 ,更 好 地满 足城 市 化 发展 和城 市生 产生 活 的需 要 。
分 ,分为铁路装卸作业 区、集装箱理货
利用无锡南货场的区域优势 ,在无 区 、 仓 储 配送 区 、 公铁联运区 、 依 托 既有 有货场的运量水平 ,且采用箱式小型货
轨检图纸分析及应用

对波峰值超过Ⅰ、
Ⅱ、Ⅲ、Ⅳ级或超
过-Ⅰ、-Ⅱ、-Ⅲ、-
Ⅳ级标准又回到基 Ⅳ
线的处所,根据图 Ⅲ
纸中的刻度及刻度
Ⅱ
的比例求出超限值 Ⅰ
Y
轨检车标准走纸图幅为每公里400mm,即1mm代表2.5m
根据《修规》规定的偏差管理值,划 出Ⅰ、Ⅱ、Ⅲ、Ⅳ或-Ⅰ、-Ⅱ、-Ⅲ、 -Ⅳ超限,确定其超限的级数和具体 里程 ;再用直尺测量实际幅值在I级 或-I级超限上的投影宽度,按1:2.50
轨距(偏差)正负:实际轨距大于标准轨距时轨距偏差为正,反 之为负。
高低正负:高低向上为正,向下为负。 轨向正负:顺轨检车正向,轨向向左为正,向右为负。 水平正负:顺轨检车正向,左轨高为正,反之为负; 曲率正负:顺轨检车正向,右拐曲线曲率为正,左拐曲线曲率为
负; 车体水平加速度:平行车体地板,垂直于轨道方向,顺轨检车正
轨道检查车各项目门限的设定根据《修规》制定。 轨道检查车对各轨道几何尺寸及舒适度的全面检测,是对线路动
态质量的系统评估,是铁路工务维修管理部门获取动态轨道状态 信息、指导现场进行养护维修与施工作业、评估新线施工和既有 线养护维修作业质量、实施轨道科学管理的重要手段。
二、轨检车对线路的评价方式
轨检车的管理数据分为:线路峰值管理和线路均值管理) 1.线路峰值管理(可以理解为对超限点的管理) 线路峰值管理即线路局部不平顺峰值的检测,根据超限峰值大小,
四、怎样读懂波形图
红色粗线有Ⅰ级以上超限
里程,本点1662+800
水平3.00mm
轨距3.00mm
左、右轨向3.00mm
100m
每
左、右高低3.00mm
一
三角坑3.00mm
小 格
轨检车波形图数据分析及其在铁路维护中的应用

轨检车波形图数据分析及其在铁路维护中的应用摘要:本文旨在研究轨检车波形图数据的获取、分析以及其在铁路维护中的应用。
通过对波形图数据的处理和分析,可以更好地了解铁路轨道的状况,提高铁路运营的安全性和效率。
本文将介绍波形图数据的采集方法、分析技术以及应用,为铁路维护提供重要的参考。
关键词:轨检车;波形图;数据分析;维护应用;引言:铁路系统是国家经济的重要组成部分,需要不断进行维护和检测以确保运行的安全性和效率。
轨检车波形图是一种重要的数据源,用于评估铁路轨道的状况。
通过对波形图数据进行分析,可以检测轨道的异常,预测维护需求,并提高铁路系统的可用性。
一、波形图数据采集方法1.1传感器的使用1)激光测距仪(LiDAR):激光测距仪广泛应用于波形图数据采集。
它通过发射激光脉冲并测量反射时间,可以高精度地获取地面的高程和轨道的曲率信息。
2)惯性测量单元(IMU):IMU传感器可以测量加速度和角速度,用于确定车辆的姿态和运动状态,有助于对轨道特征的解释和纠正。
3)高精度GPS:高精度GPS系统用于获取轨道车辆的准确位置,结合其他传感器数据,有助于创建地理信息系统(GIS)数据库,实现数据的地理参考。
4)视觉传感器:摄像头和其他视觉传感器可用于拍摄轨道照片和视频,以支持轨道的可视检查,并为数据分析提供视觉信息。
1.2数据采集的时间、地点和频率1)时间:数据采集通常在轨道交通最低的时间段进行,以减少干扰和风险。
通常在深夜或凌晨进行,避免干扰列车运行。
2)地点:数据采集的地点应涵盖整个铁路网络,包括主线、辅线、弯道、坡道、交叉口等。
重点关注曾经发生过事故或问题的区域,以及高风险区域。
3)频率:数据采集的频率可以根据维护计划和需求而变化。
通常,轨道的日常巡检是常规任务,而更深度的波形图数据采集可以每月或季度进行一次。
二、数据预处理2.1 数据清洗和噪声消除1)数据清洗:数据清洗是识别和处理异常值、缺失数据以及其他不规范的数据点的过程。
轨检车波形图分析
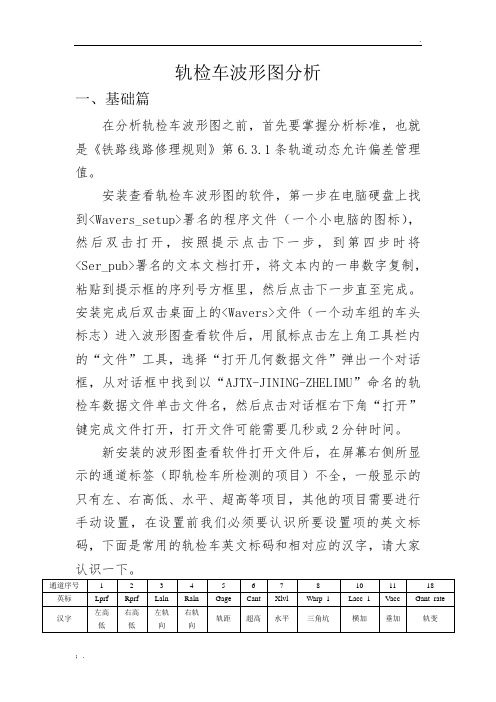
轨检车波形图分析一、基础篇在分析轨检车波形图之前,首先要掌握分析标准,也就是《铁路线路修理规则》第6.3.1条轨道动态允许偏差管理值。
安装查看轨检车波形图的软件,第一步在电脑硬盘上找到<Wavers_setup>署名的程序文件(一个小电脑的图标),然后双击打开,按照提示点击下一步,到第四步时将<Ser_pub>署名的文本文档打开,将文本内的一串数字复制,粘贴到提示框的序列号方框里,然后点击下一步直至完成。
安装完成后双击桌面上的<Wavers>文件(一个动车组的车头标志)进入波形图查看软件后,用鼠标点击左上角工具栏内的“文件”工具,选择“打开几何数据文件”弹出一个对话框,从对话框中找到以“AJTX-JINING-ZHELIMU”命名的轨检车数据文件单击文件名,然后点击对话框右下角“打开”键完成文件打开,打开文件可能需要几秒或2分钟时间。
新安装的波形图查看软件打开文件后,在屏幕右侧所显示的通道标签(即轨检车所检测的项目)不全,一般显示的只有左、右高低、水平、超高等项目,其他的项目需要进行手动设置,在设置前我们必须要认识所要设置项的英文标码,下面是常用的轨检车英文标码和相对应的汉字,请大家认识一下。
设置通道时,用鼠标点击左上角工具栏内的“配置”工具然后点击“通道设置”出来一个对话框,用鼠标在对话框右上方的下拉框(小三角)上点击出下拉菜单,然后在菜单中选择缺少的通道,选择后将对话框里的两个小方框用鼠标点击出现“√”后,点击“OK”键即完成一个通道标签的设置。
二、查看篇进入波形图查看软件后,首先要了解各个通道的显示值,我们可以看清,每条通道都有一条虚线为基线,基线以上的波形显示的数值为正值,基线以下的波形显示的数值为负值。
从图上可以看到每20米一个单元格,每个单元格都有一条纵向比例线格,每一个线格都按照比例代表一个数值,这个数值决定于通道设置的比例,一般我们在设置通道比例时高低、水平、三角坑为2:1,轨向为3:1,轨距为1:1设置,超高为5:1。
动检车(轨检车)波形图读图说明

方法二:特征点复核法
• 这也是我们要介绍的读图中最重要、最实 用的一种方法。 • 特征点有哪些:道岔、道口、桥梁(钢梁 桥)、轨距拉杆、曲线(ZH、HY、YH、 HZ点)等。 • 轨检车、动检车在检测中会扫描到两钢轨 间导电的金属物,并且在波形上会留下特 征印记。 • 先来介绍一下波形图上特征点是什么样的:
14
轨距波形图例
15
4、轨距变化率
• 定义:动检车(轨检车)检测的轨距变化率是以 2.5米的基长内轨距测量差值与基长的比值 。 • 轨距变化率基长的确定是以0.25的长度向前推进 检测的, 也就是说轨距变化率的检测是跳跃式, 每跳一步是0.25米。 • 现在的动检车(10#车)没有轨距和轨向,部轨 检车有轨距变化率,占全部扣分的比例仅为3%左 右。 • 从扣分比例来看,轨距变化率偏差本身不是重点, 而由其造成的小轨向不良才是重点。 • 轨距变化率是换算值,波形图上没有显示。
7
3、不重视
首先:由于我们不了解,所以才会不重视。
其次:我们还没有意识到一种科学的检测手 段带给我们的便捷。
8
第二部分:各项检测项目说明
• 为了让大家尽快掌握读图的基础能力,下面对各种检测项 目的基础知识进行逐一说明: 1、高低(左右); 2、轨向(左右); 3、轨距; 4、轨距变化率; 5、水平(超高); 6、曲率; 7、曲率变化率; 8、水平加速度; 9、水加变化率; 10、垂直加速度。
16
5、水平
• 定义:指同一轨道断面内左右钢轨顶面的 高差,曲线上的水平称为超高。 • 超高以左股为基准股,左股高为正,在零 线以上。(前提是轨检车顺方向行驶,动检车经常有逆方向行驶
的情况,此时与上述正好相反)
17水平(超高)波形图例 Nhomakorabea18
动检车轨检车波形图读图说明

单击此处添加文本具体内容,简明扼要地阐述你的观点
202X
动检车(轨检车)波形图读图说明及其应用
动检车(轨检车)波形资料作为重要的轨控资料长期以来一直没有受到一线干部职工的重视,因此波形资料没有得到充分利用。为了让广大干部职工充分了解波形资料的基本知识,掌握基本的读图技能,特进行此次培训。
培训的目的有三个: 一是要充分认识波形资料的重要性; 二是掌握基本的读图方法和读图技能; 三是要了解如何使用波形资料指导生产。
定义:可以简单地定义为垂直方向上速度的变化和所用时间的比值。
相对水平加速度而言,垂直加速度要简单的多,再这里不做详细解释。
引起垂向加速度的原因也很多,高低、水平、三角坑、钢轨病害等都是出现垂加的原因。
*
垂加波形图例
*
第三部分:现场复核病害方法
1
以上把波形图的基本知识都介绍过了,主要是给我们更好地读图做准备的。 下面就介绍读图的三种常用方法:
2
水平加速度由轮轨相互作用决定,轨道不平顺对其有严重影响。
3
水平加速度无论是二级偏差还是三级偏差,水加偏差扣分在动检车和轨检车中所占的比例都非常高(动检约占30%,轨检车约占20%),是重点,这一点在后面的实例中还要详细说明。
*
水平加速度波形图
*
10、水加变化率
定义:是以18米基长车体水平加速度测量值的差值与车体通过基长所用时间的比值。
先来介绍一下波形图上特征点是什么样的:
*
各种地面标志
*
还有一个重要特征点就是曲线,包括ZH、HY、YH、HZ点的位置也是现场的实际位置。
02
以上四种地面标志,道岔、道口、桥梁都是现场实际位置,公里标是每隔1公里系统自动打上去的,所以就不一定准确。
轨检车波形图分析及应用(新).共78页文档

谢谢!
轨检车波形图分析及应用(新).
21、静念园林好,人间良可辞。 22、步步寻往迹,有处特依依。 23、望云惭高鸟,临木愧游鱼。 24、结庐在人境,而无车马喧;问君 何能尔 ?心远 地自偏 。 25、人生归有道,衣食固其端。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
轨检车检测数据及波形图的应用
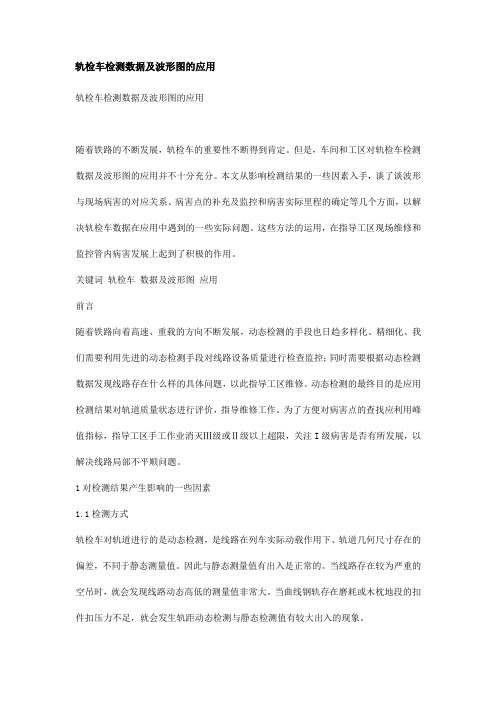
轨检车检测数据及波形图的应用轨检车检测数据及波形图的应用随着铁路的不断发展,轨检车的重要性不断得到肯定。
但是,车间和工区对轨检车检测数据及波形图的应用并不十分充分。
本文从影响检测结果的一些因素入手,谈了谈波形与现场病害的对应关系、病害点的补充及监控和病害实际里程的确定等几个方面,以解决轨检车数据在应用中遇到的一些实际问题。
这些方法的运用,在指导工区现场维修和监控管内病害发展上起到了积极的作用。
关键词轨检车数据及波形图应用前言随着铁路向着高速、重载的方向不断发展,动态检测的手段也日趋多样化、精细化。
我们需要利用先进的动态检测手段对线路设备质量进行检查监控;同时需要根据动态检测数据发现线路存在什么样的具体问题,以此指导工区维修。
动态检测的最终目的是应用检测结果对轨道质量状态进行评价,指导维修工作。
为了方便对病害点的查找应利用峰值指标,指导工区手工作业消灭Ⅲ级或Ⅱ级以上超限,关注I级病害是否有所发展,以解决线路局部不平顺问题。
1对检测结果产生影响的一些因素1.1检测方式轨检车对轨道进行的是动态检测,是线路在列车实际动载作用下、轨道几何尺寸存在的偏差,不同于静态测量值。
因此与静态测量值有出入是正常的。
当线路存在较为严重的空吊时,就会发现线路动态高低的测量值非常大。
当曲线钢轨存在磨耗或木枕地段的扣件扣压力不足,就会发生轨距动态检测与静态检测值有较大出入的现象。
1.2偏差等级的确定1.2.1因偏差等级数据采集标准不同而产生的检测差异轨检车每进行一个采样距离时,计算机对轨道的各个几个参数项目的检测结果采样一次,当某个项目的检测结果连续3次采样值都超过某一级病害界限值时,计算机统计为一处病害,并依据病害的最大值确定超限病害的相应级数。
如图所示,一、二、三级为病害界限值,A、B、C、D分别表示4个采样点,则s为一个采样距离,A为病害起点,D为病害终点,L表示超限病害长度。
由轨检车超限等级的定义可知,如果超限级数划定的标准不同,那么对同一病害做检测其检测结果也不一样。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A
23
轨检车检测性能应了解的内容:
用轨检车对轨道进行动态检测,掌握线路 在列车实际动载作用下、轨道几何尺寸偏 差与相关的各项参数(曲线要素、区段总 结报告、公里总结报告)及相应的轨道质 量指数(各种偏差的加权平均值、TQI是了 解掌握线路区段整体不平顺、是均值管理 的考核内容) 。
A
24
轨检车检测项目正负号定义 :
A
5
A
6
超高:同一横截面上左右轨顶面相对在水平面的高度差
水平:同一横截面上左右轨顶面相对在水平面的高度差, 但不含曲线上按规定设置的超高值及超高顺坡量。
A
7
水平的检测原理 :
ห้องสมุดไป่ตู้
水平为轨道同一横断面内钢轨顶面之高差 ,曲线水平称为超高。GJ-4型轨检车采用 补偿加速度系统测量水平,利用补偿加速 度系统测量车体对地垂线滚动角,利用位 移计测量车体与轨道相对滚动角,二者结 合计算出轨道倾角。利用两轨道中心线间 距(1500mm)计算出水平值。监测范围 ±200mm,误差±1.5mm。
车体响应参数:车体横向加速度、车体垂 向加速度;
辅助评价参数:轨道质量指数、各单项轨 道质量指数
A
2
波形显示软件是用于运行过程中实时显示或者事后回放波形的软件,并能进行波形的的对 比、测量、实时打印等。其波形参数包括轨距、轨距变化率、70米高低、 70米轨向、曲 率、曲率变化率、左史轨向、左史高低、超高、三角坑、ALD、水 平加速度、垂直加速度 等,还可以自己调整。 整个界面分为(A)波形显示区、(B)参数显示区和公里显示区(C)如图所示:
A
8
A
9
轨向:钢轨内侧轨距点垂直于轨道方向偏离轨距点 平均位置的偏差,分左右轨向。轨向也称作方向。
A
10
方向的检测原理 :
方向指钢轨内侧面轨距点沿轨道纵向水平 位置的变化。利用左右股轨距测量装置所 测的左右股轨距变化或位移,轨距点相对 纵向轨迹—轨向。监测范围±100mm,误 差±1.5mm。摸拟弦长18.6米 。
A
20
轨距变化率:由相隔2.5米的两点实际测量的轨距差除以米 得到(车轴定距), 轨距变化率直接影响轮轨接触几何,危
机行车安全和舒适性。
A
21
横加变化率:由相隔18米的两点实际测量的横向加 速度差除以18米得到(车辆定距离)。
A
22
曲率变化率:由相隔18米的两点实际测量的曲率差除以18米 得到(车辆定距离)。曲率是以列车走行的单位距离轨道的 方向角的变化表示。
水平正负:顺轨检车正向,左轨高为正,反之为负;
曲率正负:顺轨检车正向,右拐曲线曲率为正,左拐曲线 曲率为负;
A
3
高低:钢轨顶面沿轨道延长垂向凹凸不 平顺。
A
4
高低的检测原理 :
高低是指钢轨顶面纵向起伏变化。GJ-4型轨检车 采用惯性基准的原理测量轨道变化的实际波型, 得到高低变化的空间曲线,数据采集处理系统实 时采集数据的间隔距离为0.305m,同时可换算成5 米、10米、20米或其它弦长之测量法测量。测量 高低的传感器除了测量曲率、水平外,另外还有2 个垂直加速度计。通过车体位移,计算出轨面相 对惯性空间的位移变化,进行必要的处理,得到 高低数值。监测范围±60mm,误差为±1.5mm。 高低摸拟弦长18.6米。
A
14
A
15
轨距:两股钢轨轨面下16mm范围内,两股钢轨作 用边之间的最小距离。
A
16
A
17
曲率的检测原理 :
曲率为一定弦长曲线轨道(如30米)对应 的圆心角a,即度/30m、度数大、曲率大 、半径小。反之,度数小、曲率小、半径
大。轨检车通过曲线时、测量轨检车每通
过30米后车体方向角的变化值,计算出轨 检车通过30米后的相应圆心角的变化值, 即曲率。曲率、曲率变化率是检测曲线圆
A
11
A
12
(扭曲)三角坑:左右两轨顶面用相距一定基长的 水平的代数差表示,包括缓和曲线超高顺坡造成的 扭曲量,轨检车基长取2.5米。
A
13
扭曲(三角坑)的检测原理 :
扭曲反映了钢轨顶面的平面性。扭曲会使车轮抬 高面悬空,使车辆产生3点支撑1点悬空,极易造 成脱轨掉道。扭曲值h为:h=(a-b)-(c-d) h=△h1-△h2。△h1为轨道横断面I—I的水平值 ,△h2为轨道断面Ⅱ--Ⅱ的水平值,△h1-△h2 为基长L(断面I—I与断面Ⅱ--Ⅱ之间距)时两轨 道断面的水平差。水平已经测出,所以只要按规 定基长取两断面水平差即可计算出扭曲值。三角 坑基长可任意设定,如2.5米、5米、15米连续计 算基长的扭曲值,轨检车检测系统基长定为2.4米 。该值接近客车转向架 (2.44m)的轮对轴距。 基长可在18m内变换,监测范围±100mm,误差 ±1.5 mm。
总则
轨道检查车(以下简称轨检车)是检查轨 道状态,查找轨道病害,评定线路动态质 量,指导线路维修的动态检查设备,其作 用是通过检查了解和掌握线路局部不平顺 (峰值管理)、线路区段整体不平顺(均 值管理)的动态质量,对线路养护维修工 作进行指导,实现轨道科学管理。
A
1
轨检车检测的项目
轨道几何参数:左高低、右高低、左轨向、 右轨向、水平、轨距、三角坑、超高、曲 率以及长波轨道不平顺;
顺度的波形通道。能正确判断曲线正矢连
续差和曲线的圆顺度。曲率变化率的波形
通道有突变,正矢肯定不好。
A
18
A
19
70m高低:70m范围内钢轨顶面沿轨道延长垂向凹凸不平顺。 1.5~70m是长波高低和轨 向不平顺随机信号所包含的波长范围 以往轨检车检测输出和评价的高低和轨向波长范围是 1.5~42m。 对于160km/h以下线路1.5~42m波长范围的高低和轨向不平顺足以反映影响 行车安全和舒适性。 但160km/h以上是1.5~42m波长范围的高低和轨向不平顺主要反映 影响行车安全,考虑舒适性必须而需重点考虑1.5~70m波长范围的高低和轨向不平顺。
轨检车检测项目正负号定义:轨检车正向:检测梁位于轨 检车二位端,定义二位端至一位端方向为轨检车正向,轨 检车行使方向不轨检车正向一致时为正向检测,反之为反 向检测。
轨距(偏差)正负:实际轨距大于标准轨距时轨距偏 差 为正,反之为负;
高低正负:高低向上为正,向下为负 ;
轨向正负:顺轨检车正向,轨向向左为正,向右为负;