消防无人机使用说明书
AS-MF09指南针使用手册_v10 灭火机器人
5.电机使用的大电池包含充、放两个接口,充电时用标有“充电”的接口连接到充电转接板 上(为长线接口),机器人使用时请使用短线接口; 6.正常情况下,两种电池充足电均需要5-7个小时。充电器上红灯变为绿灯表明电池充电完 毕。如果10小时以上电池还未充足或者充电时间变得很短,请停止使用电池和充电器。 (过 放或过充可能会导致电池寿命缩短) 7. 大功率电池电源接线线径适合配套电机电流。如果您需要使用更大电流的电机,请改用 更粗的连接线。 8. 如果发现电池外壳鼓胀,漏液,破损,请勿再继续使用该电池,这是非常危险的。并尽 快回收或者交由专业人士处理。 9.如果发现任何异常气味、噪音或烟雾,请立即停止使用机器人。关闭机器人电源,取出 电池,远离易燃易爆物品。
2
第三章 操作
指南针每次到新的环境中使用,都需要进行消磁和置零点操作。当您打开控制器电源,看到 指南针的方向指示灯点亮后,就可开始进行以上操作。 首先,需要消磁,请按如下步骤操作。 操作 指示灯状态 按住操作按钮不放,指南针会逐个 逐个依次点亮灯Æ第 2 二个灯 点亮指示灯,当第二个灯亮起时, 亮起Æ8 个灯闪烁 放开按钮,进入消磁状态 缓慢旋转指南针或机器人,使指南 针记忆该场地的磁场环境。 持续 30 秒或者 2 圈以上。 短按操作按钮,结束消磁 设置零点,请按照如下步骤操作: 操作 将机器人至于场地,并且指南针外 壳上的最大的突出点对准需要标 定的 0 度位置 短按操作按钮,设置 0 度位置 指示灯状态 单个指示灯亮,指示方向 8 个灯闪烁
危险
1.请勿加热或焚烧电池。 2.请勿用金属物品将电池的正负端子连接。 3.请勿在容易接触到金属物品(如珠宝、别针、纽扣等)的地方携带或存放电池。 4.请勿将电池存放在阳光直射的地方,闷热的汽车里,高温的地方或靠近热源的地方,等 等 5.请勿尝试以任何方式分解或改装电池,如焊接等。这样会破坏电池端子或造成电池液体 飞溅,导致潜在的火灾、爆炸、电池漏液、过热或其他损坏 6.如果电池液体飞溅入您的眼睛,请不要揉搓。请用清凉的水流冲洗眼睛,并立即就医。 7.如果充电电池在规定时间内没有充足电量,请停止充电,并且不可再使用。否则可能导 致火灾、爆炸、燃烧或过热。 8.如果电池裂缝或破损,请勿使用。否则可能导致火灾、爆炸、燃烧或过热。 9.请勿使电池受到强烈撞击或持续震动。否则可能导致火灾、爆炸、燃烧或过热。 10.在操作过程中,如果电池漏液、变色、变形、鼓胀或任何形式的异常,请立即停止使用 机器人和电池。并于广茂达公司联系
消防小蜜蜂的使用流程
消防小蜜蜂的使用流程1. 简介消防小蜜蜂是一款用于灭火和救援的无人机,由于其小巧灵活的特点,在窄小空间和高层建筑中灭火具有很大的优势。
本文将介绍消防小蜜蜂的使用流程,以保证正确、高效地使用该设备。
2. 确保设备正常运行在操作消防小蜜蜂之前,需要确保设备正常运行,包括电量充足、无故障和控制器连接正常等。
以下是一些操作步骤:•步骤1:确认消防小蜜蜂电量。
连线控制设备并打开电源开关,检查电量指示灯是否亮起。
•步骤2:检查蜜蜂机身是否有明显损伤或故障。
特别注意蜜蜂的无人机部件和附着设备是否安装正确。
•步骤3:连接无线控制器与蜜蜂。
按照使用说明书连接无线控制器与消防小蜜蜂设备。
3. 操控消防小蜜蜂经过前述操作确认设备正常运行后,可以开始操控消防小蜜蜂进行灭火和救援任务。
以下是关键的操作步骤:•步骤1:启动消防小蜜蜂。
按照说明书操作,开启无人机并等待它升空。
确保安全距离远离人群和障碍物。
•步骤2:飞行路径规划。
根据灭火或救援任务需求,规划好消防小蜜蜂的飞行路径,包括起飞点、目标点和返回点。
•步骤3:控制飞行方向和高度。
通过控制器,控制消防小蜜蜂的飞行方向和高度,确保按照预定路径前进。
•步骤4:灭火喷洒或救援操作。
根据任务需求,控制喷洒机器或操控机械臂进行灭火或救援操作。
•步骤5:监控任务执行情况。
通过监控屏幕或特定的应用程序,实时检测任务执行情况,确保任务进展顺利。
4. 注意事项使用消防小蜜蜂时需要注意以下事项,以确保安全和提高效率:•安全第一:操作时要确保人员安全,远离无人机的旋转部件,并避免触碰无人机的其他敏感部位。
•遵循法规:在使用消防小蜜蜂时,在国家和地方的法规框架下操作。
必要时申请并遵循相关的执照和资质要求。
•定期维护:定期对消防小蜜蜂进行维护和保养,包括清洁、更新零部件和检查传感器等。
确保设备始终处于最佳工作状态。
•实战演练:定期进行实战演练和模拟训练,以提高操作员的技能和熟悉度,确保能够应对紧急情况。
无人机飞行操作手册

无人机操作手册一.飞行前环境检查1)在远离人群的开阔场地飞行2)避免在高压线、发射塔、变电站以及有磁性的大块金属、矿山等地飞行3)注意观察拍摄区域内树木、电线、建筑物分布状况4)在厂家规定海拔高度以下飞行5)在厂商规定的适宜温度、天气状态的环境中飞行6)在飞行器允许的风速下飞行7)在合法区域飞行,提前查看是否是禁飞区、限飞区等区域8)规划好合适的起飞、降落场地二.安全合法飞行为避免可能的伤害和损失,务必遵守以下各项:1)不得在饮酒、吸毒、药物麻醉、头晕、乏力、恶心等其他身体状态不佳或精神状况不佳的情况下操控本产品。
2)禁止在空中执行电机停转操作。
3)降落后务必先关闭飞行器然后关闭遥控器。
4)禁止使用飞行器向建筑物、人群或动物投掷、发射任何危险物体。
5)熟悉了解每种飞行模式。
熟悉失控返航模式下飞行器的行为6)应了解当地有关飞行器的法律法规。
如有必要,用户需自行向有关部门申请授权使用飞行器。
7)应确保已经对飞行器有足够程度的了解,并清楚所有的紧急返航措施。
8)每次飞行前,应当准备好飞行计划。
请勿鲁莽操控本产品。
9)在使用飞行器的相机拍摄前,请务必尊重他人隐私权。
确保在使用飞行器的相机前,用户已清楚并理解当地有关隐私的法律法规。
10)禁止使用飞行器进行任何违法及不当行为(包括但不限于间谍、军事行动以及非法调查工作)。
11)禁止使用飞行器进行任何违反他人隐私权的行为。
12)禁止使用飞行器侵犯他人物权。
三.飞行前飞行器检查1)确保遥控器、飞机、移动设备及其它各设备电池电量足够飞行2)确保遥控器开关、摇杆拨动正常,天线位置正确3)确保电池外观完好,无鼓包、破损,低温飞行应提前预热电池4)确保螺旋桨无破损并安装方向正确、牢固5)确保飞行器电机内部清洁,转动无卡顿6)确保飞行器机架、壳体、脚架、云台,无裂缝、破损7)确保无任何异物粘附于相机镜头上并且已将存储卡插入相机,确保云台能够无阻碍地活动8)确保GPS卫星正常,如不正常根据提示进行指南针校准,去往新地点飞行也应校准指南针9)确保飞控、遥控器、云台、电池等固件已经更新至最新版本四.飞行中应急处置1.飞行中无图传信号,保持飞行器悬停,调整天线摆放位置2.如飞行器失控,等待飞行器自动返航,到近处后使用遥控器夺回控制权3.如飞行器起飞后晃动较大,可能是GPS信号不好或指南针干扰所致,应切到姿态模式降落,到GPS信号好或无干扰地点校准指南针后飞行4.飞行过程中提示指南针异常,应切到姿态模式降落,并到无干扰地点校准指南针5.当低电量报警发出时,务必将飞行器返航并降落,以防止失去动力后对飞行器、人以及动物造成危险7.如空中突遇阵风,应缓慢降高到安全高度或降落8.飞行过程中无法辨别飞行器前后方向,近处可旋转飞行器找到飞行器尾部指示灯,超视距可观察APP地图上飞行器指示图或切换到无头模式将飞行器飞回。
无人机在火灾侦测与救援中的应用与操作方法

根据风险评估结果,采取相应的措施 对风险进行控制,如制定应急预案、 配备备用设备等,以确保任务的安全 执行。
THANKS
感谢观看
无人机的种类与特点
无人机可根据不同标准进行分类,如 飞行高度、航程、任务载荷等。
无人机具有多种特点,如结构紧凑、 机动性强、使用方便等。不同类型的 无人机适用于不同的任务场景,如侦 察、航拍、运输等。
02
无人机在火灾侦测中的应用
无人机火情侦测技术原理
无人机搭载高分辨率摄像头和热成像设备,通过实时传输图像和数据,能够快速准 确地识别火源、火势和烟雾情况。
无人机火情侦测技术利用图像处理和人工智能技术,对采集的图像进行分析,自动 识别火源、火势和烟雾,并将相关信息实时传输给指挥中心。
无人机火情侦测技术还可以通过GPS定位系统,精确确定火源位置,为消防部门提 供准确的救援路线和决策依据。
无人机火情侦测的优势
01
02
03
快速响应
无人机能够迅速飞抵火场 ,实时传输火场情况,为 消防部门提供及时的信息 支持。
在恶劣天气条件下,如大风、雷雨、 雾霾等,应避免进行无人机飞行,以 确保飞行安全。
避免干扰正常航空交通
在无人机操作过程中,应时刻关注空 中交通状况,避免干扰正常航空器的 飞行。
无人机操作的风险评估与控制
风险评估
在执行任务前,应对无人机操作进行 全面的风险评估,包括飞行环境、设 备性能、人员技能等方面的评估。
势的信息。
救援物资投送
无人机可搭载救援物资,如灭 火器、生命探测仪等,快速送
达救援现场。
搜救行动
无人机可搭载热成像、声音识 别等设备,协助搜救受困人员
。
无人机在火灾救援中的技术实现
无人机说明书让您了解无人机的操作方法和飞行技巧
无人机说明书让您了解无人机的操作方法和飞行技巧无人机说明书感谢您购买我们的无人机产品。
为了让您更好地了解和掌握无人机的操作方法和飞行技巧,我们特别为您提供了详细的说明书。
请您仔细阅读以下内容,并按照操作步骤进行实践,以确保安全飞行和最佳使用体验。
I. 无人机概述无人机是一种由遥控操作或自动控制的无人飞行器。
它具有强大的机动性和技术性能,广泛应用于航拍、勘测、救援等领域。
本款无人机采用高强度材料制造,可提供稳定的飞行表现和良好的飞行控制。
II. 无人机组件1. 机身:无人机的主体部分,包含电机、螺旋桨等。
2. 控制器:用于控制无人机的飞行方向和姿态。
3. 电池:提供无人机的动力源,需要定期充电。
4. 遥控器:用于操作和控制无人机的关键设备。
5. 摄像头:某些型号的无人机配备了高清摄像头,可实现实时拍摄与录像功能。
III. 无人机操作步骤1. 起飞前准备:a. 确保无人机电量足够,避免因电量不足导致飞行中断。
b. 检查螺旋桨是否紧固可靠,避免在飞行过程中发生意外。
c. 阅读使用说明书,了解遥控器的功能和操作。
2. 打开遥控器电源,并与无人机进行连接,确保两者信号连接稳定。
3. 校准无人机:a. 将无人机放置在平坦水平的地面上。
b. 按照说明书的指示,进行水平校准和罗盘校准,确保无人机姿态正确。
4. 起飞:a. 缓慢推动遥控器的油门杆,使无人机逐渐升空。
b. 控制无人机保持平稳的升空状态,避免突然增加油门导致失控。
5. 基本飞行技巧:a. 前进和后退:推动遥控器的左右摇杆,控制无人机的前进和后退。
b. 旋转:推动遥控器的左右摇杆,控制无人机的左右旋转。
c. 上升和下降:推动遥控器的油门杆,控制无人机的上升和下降。
d. 悬停:释放遥控器的所有摇杆,让无人机悬停在空中。
6. 拍摄与录像:a. 如无人机配备摄像头,可通过遥控器上的按钮进行拍摄和录像控制。
b. 拍摄和录像结束后,将遥控器上的按钮复位,停止拍摄与录像。
无人机产品使用手册20150701

产品使用说明书二〇一五年三月十八日目录1.前言 (1)2.飞行安全守则 (1)3.航摄流程图 (3)4.飞机的参数和性能、特点及应用领域 (5)5.无人机各部件的介绍和作用 (6)6.APCommander地面站软件介绍 (9)7.飞行任务航线设计教程 (10)8.飞行组分工和职责 (13)9.维护、保养、运输和使用 (14)10.锂电池维护说明 (14)11.免责声明 (16)12.双方事故鉴定和分责 (18)13.附录: (19)1. 前言飞行组要养成良好的习惯,出行前必须按清单清点设备、准备常用修补粘胶、材料和工具、检查设备电池电量是否满足此次的飞行任务。
每一样都要仔细清点,在家尽量想得周全,外场飞行才能更好的开展工作,提高工作效率。
飞行是一项技术含量高,需要仔细进行地面检查的一项工作。
千万不要马虎大意,把安全放在第一位,把隐患消除在地面,设备不要带病飞行,要做到仔细——仔细——再仔细——检查——检查——再检查。
要做到一丝不苟,这是飞机安全起飞的最基本条件。
检查过程中必须落实到个人,每个检查项是都要有应答确定,确定无误后才能起飞,不要怕工作麻烦。
2. 飞行安全守则(1)在飞行的过程中要做到不伤害他人,不被他人伤害,因此在整个飞行过程中要做到三不飞、三注意:a)飞机没有做好飞前检查不飞.b)飞行区域天气地形不摸清楚,飞行条件不符合不飞.c)飞行区域敏感,不符合政策法规不飞.a)注意伙伴当前的工作状态.b)注意飞机当前状态.c)注意自身状态.(2)不安全因素及预防a.工作状态下的螺旋桨工作状态下的螺旋桨的整个回转平面内20米内都是危险区域,在其运转的过程中人员严禁在此区域内逗留,每次飞行都要检查螺旋桨的固定螺丝有没有松动,桨叶有没有损伤和裂痕。
b.弹射皮筋因为无人机是通过一根一端由地钉固定在地面上的皮筋储能,然后在一瞬间释放来赋予飞机动能,使飞机在短距离内达到起飞速度。
所以在弹射皮筋拉伸的过程中,会储存大量弹性势能,因此在弹射作业及平时检查保养的过程中,必需由经过专门培训的人员来操作,每次起飞前和弹射作业以后都必需认真的检查橡筋有没有损伤,橡筋头固定装置稳妥可靠。
灭火机器人使用说明
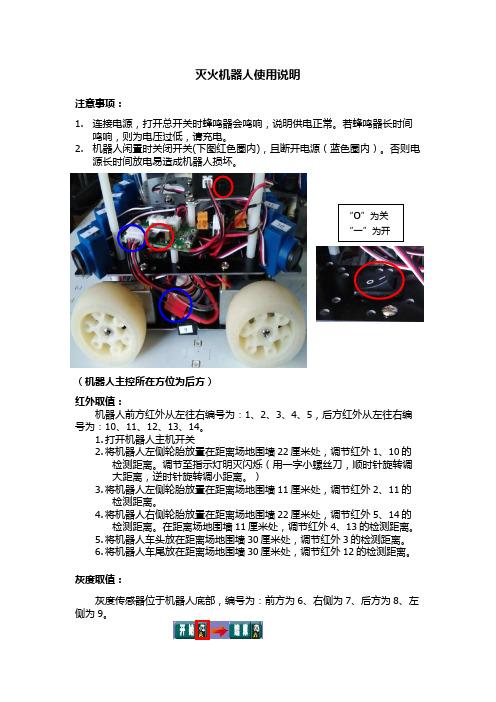
灭火机器人使用说明注意事项:1. 连接电源,打开总开关时蜂鸣器会鸣响,说明供电正常。
若蜂鸣器长时间鸣响,则为电压过低,请充电。
2. 机器人闲置时关闭开关(下图红色圈内),且断开电源(蓝色圈内)。
否则电源长时间放电易造成机器人损坏。
(机器人主控所在方位为后方)红外取值:机器人前方红外从左往右编号为:1、2、3、4、5,后方红外从左往右编号为:10、11、12、13、14。
1. 打开机器人主机开关2. 将机器人左侧轮胎放置在距离场地围墙22厘米处,调节红外1、10的检测距离。
调节至指示灯明灭闪烁(用一字小螺丝刀,顺时针旋转调大距离,逆时针旋转调小距离。
)3. 将机器人左侧轮胎放置在距离场地围墙11厘米处,调节红外2、11的检测距离。
4. 将机器人右侧轮胎放置在距离场地围墙22厘米处,调节红外5、14的检测距离。
在距离场地围墙11厘米处,调节红外4、13的检测距离。
5. 将机器人车头放在距离场地围墙30厘米处,调节红外3的检测距离。
6. 将机器人车尾放在距离场地围墙30厘米处,调节红外12的检测距离。
灰度取值:灰度传感器位于机器人底部,编号为:前方为6、右侧为7、后方为8、左侧为9。
新建文件,鼠标双击上图中开始图标右半部分方框区域,弹出编辑框:根据机器人自身的测试值进行修改上图中方框内的B1,B2的值。
灰度黑色分界值B1为机器人底部灰度在场地黑色部分的值,取4个灰度的最大值再加200;灰度白色分界值B2为机器人底部灰度在场地白色部分的值,取4个灰度的最小值再减200。
点击“保存模板”,再保存。
灰度取值方法为:1.打开机器人主机开关;2.按主控左下方按钮进行选择,选定“TEST”选项,按右上方按钮确定;3.选择“Analog”选项,查看通道口6、7、8、9的数值。
如:黑色值,1309、1200、1102、1211,则将B1的数值改为1500 白色值,2601、2722、2655、2695,则将B2的数值改为2400函数说明:新建文件,点击左下方“任务”按键,跳转至任务功能模块。
(完整版)消防无人机方案
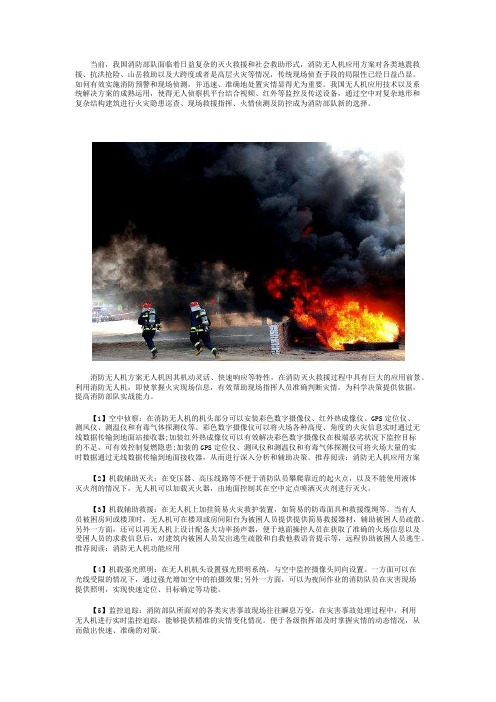
当前,我国消防部队面临着日益复杂的灭火救援和社会救助形式,消防无人机应用方案对各类地震救援、抗洪抢险、山岳救助以及大跨度或者是高层火灾等情况,传统现场侦查手段的局限性已经日益凸显。
如何有效实施消防预警和现场侦测,并迅速、准确地处置灾情显得尤为重要。
我国无人机应用技术以及系统解决方案的成熟运用,使得无人侦察机平台结合视频、红外等监控及传送设备,通过空中对复杂地形和复杂结构建筑进行火灾隐患巡查、现场救援指挥、火情侦测及防控成为消防部队新的选择。
消防无人机方案无人机因其机动灵活、快速响应等特性,在消防灭火救援过程中具有巨大的应用前景。
利用消防无人机,即使掌握火灾现场信息,有效帮助现场指挥人员准确判断灾情,为科学决策提供依据,提高消防部队实战能力。
【1】空中侦察:在消防无人机的机头部分可以安装彩色数字摄像仪、红外热成像仪、GPS定位仪、测风仪、测温仪和有毒气体探测仪等。
彩色数字摄像仪可以将火场各种高度、角度的火灾信息实时通过无线数据传输到地面站接收器;加装红外热成像仪可以有效解决彩色数字摄像仪在极端恶劣状况下监控目标的不足,可有效控制复燃隐患;加装的GPS定位仪、测风仪和测温仪和有毒气体探测仪可将火场大量的实时数据通过无线数据传输到地面接收器,从而进行深入分析和辅助决策。
推荐阅读:消防无人机应用方案【2】机载辅助灭火:在变压器、高压线路等不便于消防队员攀爬靠近的起火点,以及不能使用液体灭火剂的情况下,无人机可以加载灭火器,由地面控制其在空中定点喷洒灭火剂进行灭火。
【3】机载辅助救援:在无人机上加挂简易火灾救护装置,如简易的防毒面具和救援缆绳等。
当有人员被困房间或楼顶时,无人机可在楼顶或房间阳台为被困人员提供提供简易救援器材,辅助被困人员疏散。
另外一方面,还可以再无人机上设计配备大功率扬声器,便于地面操控人员在获取了准确的火场信息以及受困人员的求救信息后,对建筑内被困人员发出逃生疏散和自救他救语音提示等,远程协助被困人员逃生。
火灾无人机逃生方法
火灾无人机逃生方法随着科技的不断发展,无人机已经成为人们日常生活中不可或缺的一部分。
它们不仅仅是用来拍摄航拍视频或者在军事领域中使用,还可以发挥更多的作用。
在火灾发生时,无人机也可以成为一种有效的逃生工具。
本文将介绍火灾无人机逃生方法,希望能够引起人们的重视并加以利用。
二、火灾无人机逃生方法无人机逃生利用了无人机的飞行优势,通过携带救援用品、传递信息、提供视野等功能,帮助被困者快速脱离火灾现场。
以下是火灾无人机逃生的具体方法。
1. 无人机救援装备在火灾发生时,被困者常常无法找到适当的救援方式。
无人机配备了各种救援装备,可以将生活必需品、急救药品、食物、水等物品迅速投送到被困者身边,帮助他们渡过难关。
2. 信息传递无人机可以携带摄像头或红外线热像仪,对火灾现场进行拍摄或监视,实时传输图像或视频至指挥中心。
这有利于现场救援人员了解火情发展状况,为后续救援提供必要的信息。
3. 提供视野火灾现场的浓烟和火势可能会导致被困者视野受限,难以找到逃生通道。
无人机可以携带高清摄像头,为被困者提供实时的火灾现场视野,指引他们寻找安全通道。
4. 快速逃生引导当火灾发生时,无人机可以悬挂光源或发光标志物,指引被困者找到逃生路线。
同时,无人机可以发出声音或提示信息,告知被困者如何快速逃离火灾现场。
5. 燃气检测与化验无人机还可以配备燃气检测仪器,监测火灾现场的燃烧情况和有毒气体浓度。
通过无人机传回的数据,救援人员可以及时制定救援方案,避免危险。
6. 搜索救援无人机可以利用自身的飞行优势,对火灾现场周围的区域进行搜索救援,寻找遇难者或失踪者的线索。
其作为一种领域巡视工具,对于大型火灾灾害的救援工作有着不可替代的作用。
7. 自主导航无人机配备了先进的定位和导航系统,可以在复杂的环境中进行自主飞行和航线规划,帮助救援人员更加快速、高效地进行逃生救援。
8. 远程控制无人机可以利用远程控制技术,由指挥中心对其进行实时操控和监视。
消防队无人机操法,战法汇编
消防队无人机操法,战法汇编一、无人机操法1.操作人员要求操作人员必须经过专业培训,掌握无人机的基本操作技能,了解无人机的性能和特点。
操作人员应具备基本的计算机操作能力和网络意识,能够熟练使用遥控器和相关软件。
2.操作流程(1)检查无人机状态:操作人员应首先检查无人机的电池、电机、遥控器等部件是否正常,确保无人机处于良好的工作状态。
(2)起飞操作:操作人员通过遥控器控制无人机起飞,起飞时应选择相对平坦、空旷、无障碍物的场地,确保无人机能够顺利起飞。
(3)飞行控制:操作人员通过遥控器控制无人机的飞行方向、高度、速度等,同时应注意观察无人机的飞行状态和周围环境,避免发生意外。
(4)降落操作:当无人机完成拍摄或其他任务后,操作人员应通过遥控器控制无人机安全降落,降落时应选择相对平坦、无障碍物的场地,避免发生意外。
3.安全注意事项(1)操作人员应佩戴安全帽、穿防护服等安全装备,确保自身安全。
(2)在飞行过程中,应保持无人机的稳定,避免发生摇晃或倾斜。
(3)在拍摄或其他任务完成后,应将无人机及时收回,避免造成丢失或损坏。
二、无人机战法汇编1.搜索定位战法利用无人机的侦察和探测能力,对灾害事故现场进行全方位的搜索和定位,为救援队伍提供准确的信息和决策支持。
具体步骤如下:(1)利用无人机搭载的高清相机和拍摄装置,对灾害事故现场进行全面的航拍和录像,获取现场的第一手资料。
(2)利用无人机的侦察和探测能力,搜索并定位被困人员、着火点、易燃易爆物品等关键信息。
(3)将获取的信息及时传递给救援队伍,为救援工作提供准确的信息和决策支持。
2.灭火救援战法利用无人机的灭火救援能力,对灾害事故现场进行快速扑灭火源和救援被困人员。
具体步骤如下:(1)利用无人机的侦察能力,确定着火点和火势情况,为灭火救援提供准确的信息支持。
(2)利用无人机搭载的灭火装置,如干粉灭火器等,对着火点进行快速扑灭火源。
高校消防无人机应急预案

一、适用范围本预案适用于我校校园内发生火灾事故时,利用消防无人机进行初期火情侦察、火灾扑救和应急救援等任务。
本预案旨在提高我校应对火灾事故的能力,保障师生生命财产安全。
二、组织机构及职责1. 消防无人机指挥中心负责统一指挥、协调和调度消防无人机及相关人员,确保无人机任务顺利完成。
2. 消防无人机操作组负责无人机操作、维护和保养,确保无人机在任务中的正常运行。
3. 消防无人机支援组负责提供无人机所需的后勤保障,包括燃油、电池、备件等。
4. 消防救援组负责现场火情侦察、灭火救援和人员疏散等工作。
5. 医疗救护组负责对受伤人员进行救治,确保伤员得到及时救治。
三、应急预案流程1. 火情报警(1)一旦发现火灾,立即启动应急预案,并向消防无人机指挥中心报告火情。
(2)消防无人机指挥中心接到报告后,立即启动无人机,组织无人机操作组进行火情侦察。
2. 火情侦察(1)无人机操作组根据指挥中心指令,起飞无人机对火场进行侦察。
(2)无人机侦察到火情后,立即向指挥中心报告火势、燃烧物质、被困人员等信息。
3. 灭火救援(1)根据无人机侦察结果,指挥中心向消防救援组下达灭火救援指令。
(2)消防救援组按照指令,组织人员扑救火灾,并疏散被困人员。
4. 医疗救护(1)医疗救护组在火场周边设置救护点,对受伤人员进行救治。
(2)对于重伤员,及时联系救护车进行转院治疗。
5. 后期处置(1)火灾扑灭后,无人机操作组对无人机进行检查,确保其完好无损。
(2)消防无人机指挥中心对此次火灾救援进行总结,完善应急预案。
四、注意事项1. 消防无人机操作人员需经过专业培训,具备无人机操作和灭火救援技能。
2. 消防无人机操作过程中,确保无人机与地面通信畅通,及时反馈火场情况。
3. 火场救援过程中,无人机操作人员要密切关注火情变化,确保无人机安全飞行。
4. 消防无人机在执行任务时,不得进入烟雾浓重、有毒有害气体区域。
5. 消防无人机操作人员要严格按照操作规程进行操作,确保无人机安全运行。
无人机安全操作指引说明书
2 遥控器 1) 每次飞行前,请将遥控器电池电量充满。 2) 遥控器开机后闲置 9 分钟即发出报警,拨动摇杆可让遥控器恢复为正常工作状态。遥控器持 续闲置 10 分钟将自动关机。 3) 使用遥控器上的手机支架时,确保设备固定牢靠,务必压紧夹持装置避免移动设备滑落。 4) 确保遥控器天线展开并调整到合适的位置,以获得最佳的通信效果。 5) 遥控器天线如有损坏将影响使用性能,请及时返修。 6) 如更换遥控器,需要重新对频才能使用。具体对频步骤请参考用户手册。 7) 遥控器闲置时,每隔 3 个月左右重新充电一次以保持电池活性。
访问本公司网站获取最新说明和警告。本公司保留更新本免责声明的权利。最新的免责声明, 请以 官网上及您邮件接收的版本为准。
务必在使用产品之前仔细阅读本文档,了解您的合法权益、责任和安全说明;否则,可能带来 财产损失、安全事故和人身安全隐患。一旦使用本公司产品,即视为您理解、认可和接受本声明全 部条款和内容。使用者承诺对自己的行为及因此而产生的所有后果负责。使用者承诺仅出于正当目 的使用本产品,并且同意本条款及本公司可能制定的任何相关政策或者准则。
2) 请勿在强磁场区域或大块金属附近校准,如磁矿、停车场、带有地下钢筋的建筑区域等。
4
免责声明和安全操作指引
3)校准时请勿随身携带铁磁物质,如手机等。 4) 指南针校准成功后,将飞行器放回地面时,如果受到磁场干扰,APP 会显示处理方法,请按显
示的处置方法操作。 为避免可能的伤害和损失,飞行器在飞行过程中,一旦出现严重的漂移(如飞行器无法飞直线), 请务必马上降落。
重要提示
○ 使用本产品前请仔细阅读本操作指引,并严格按照说明操作。 ○ 请不要自行尝试拆解、改装、维修飞行器,如有需要请联系代理商。 ○ 本操作指引如有更新,恕不另行通知。
火场内救援无人遥控飞行器系统用户指南说明书

,Implementation of Trapped Personnel Detection and Evacuation Guidance in Indoor Fire Scene Based on Quadrotor UAVDanyu BiCollege of Electronics and Information EngineeringTongji UniversityShanghai, China*******************Yong ShenCollege of Electronics and Information EngineeringTongji UniversityShanghai, ChinaYouling YuCollege of Electronics and Information EngineeringTongji UniversityShanghai, ChinaClaudio MelchiorriDept. of Electrical, Electronic and Information EngineeringUniv. of BolognaItalyAbstract—This paper presents a solution to trapped personnel detection and evacuation guidance in indoor fire scene based on quadrotor UAV. Our approach purely relies on UAV’s own monocular camera as the main sensor, and therefore UAV can search and rescue in unknown, GPS-denied fire environments. In this paper, an effective method was proposed, which separated the mission into two parts: one was trapped personnel detection by using face detection algorithm, the other one was evacuation guidance, which was actually scale-aware navigation and path planning by using visual SLAM system. Costly computations were carried out on an external laptop that communicated with the quadrotor over wireless. The solution can be used directly with a Parrot AR.Drone quadrotor.Keywords—Quadrotor UAV, Face detection, Navigation, visual SLAM, Search and Rescue.I.I NTRODUCTIONThis Aerial robotics is a fast-growing field of robotics, and multi-rotor aircrafts are rapidly growing in popularity and now universally recognized for its applications in the commercial and military markets. The quadrotor, a unique type of Unmanned Aerial Vehicle (UAV), is an under-actuated system with four inputs and six outputs [1]. The advantages of the quadrotor UAVs lie in their Vertical Take Off and Landing (VTOL) ability, maneuverability due to their inherent dynamic nature, low-cost and small-size flying platform, simple structure and good stability [2].In reality, it’s really dangerous for human beings to do search-and-rescue works in the firing buildings which have the possibilities of collapse. Meanwhile the complicated unknown indoor environment greatly increases the difficulties for human search-and-rescue works. That is why robot is chosen instead. Compared with ground vehicles, the main advantage of flying devices is their extension from 2D plane into 3D space by changing their flight altitude. Among the flying devices, quadrotor UAVs are dominant over traditional helicopters for their fixed rotor propulsion mode. Therefore, quadrotor UAVs that can autonomously operate in indoor environments are envisioned to be useful for search and rescue activities.The paper is structured in the following manner. In Sec. II we introduce our emergency services scenario. In Sec. III we consider the trapped personnel detection phase of the mission in more details and in Sec. IV, we consider the evacuation guidance phase of the mission in more details, while in Sec. V presents the integrated solution and practical experiments and results. Sec. VI concludes with final remarks and plans for future activity.II.A N E MERGENCY S ERVICE S CENARIOA particular situation is assumed: There are thousands of people in one shopping mall on weekends, and there are numerous rooms in this building, such as toilets and offices. Suddenly, somewhere in the building catch fire and people inside is trapped and being more and more scared. It is really difficult for rescuers to search all the rooms and rescue trapped people as soon as possible. Therefore, the quadrotor UAVs can provide essential supports and greatly increase the working efficiency of human rescue activities.The emergency service mission of quadrotor UAV is shown as Fig. 1.International Conference on Intelligent Control and Computer Application (ICCA 2016)Fig. 1. Flow chart of emergency service missionA. Quadrotor InitializationOnce the Fire alarm is on, the quadrotor UAV which is already equipped in the building will take off. In the first 2-3 seconds, the UAV will initialize itself quickly, including parameters initialization, image transmission, vertical takeoff & hovering and locate itself in unknown environment (Assuming the room is messy because of the fire).B. Flight ControlOnce the initialization work is done, the UAV will execute a flight plan automatically by stored mission or manually by remote joystick controller. Meantime, the UAV will do face detection work to detect if there are any trapped people in the fire scene. If the quadrotor UAV finds anyone, it will start light alerting system immediately.C. Quadrotor WithdrawAfter the quadrotor UAV finishes the detecting task, it will report both the position and face portrait of each trapped person, and finally count and upload the total number of them remotely by WIFI. When multiple quadrotor UAVs search in multiple rooms simultaneously, the feedback information they provide will help rescuers to make an excellent plan in a short time. And then quadrotor UAV itself will get away from the fire scene as soon as possible.III. T RAPPED P ERSONNEL D ETECTIONA. Face DetectionThe face detector uses a cascade of boosted classifiers working with Haar-like features, which has been initially proposed by Paul Viola [3] and improved by Rainer Lienhart [4]. The cascade classifier can be initialized with different XML files that define the object we want to detect. These files were created by training machine learning algorithms on hundreds or even thousands of images that either contain a face or do not. The learning algorithm is then able to extract the features that characterize faces and the results are stored in XML format. After a classifier is trained, it can be applied to search for the face in the whole image, which can move the search window across the image and check every location using the classifier. The classifier can be easily resized in order to find the objects of interest at different sizes, which ismore efficient than resizing the image itself. The word “cascade” in the classifier name means that the resultant classifier consists of several simpler classifiers (stages) that are applied subsequently to a region of interest until at some stage the candidate is rejected or all the stages are passed. The word “boosted” means that the classifiers at every stage of the cascade are complex themselves and they are built out of basic classifiers using one of four different boosting techniques (weighted voting). Currently Discrete Adaboost, Real Adaboost, Gentle Adaboost and Logitboost are supported. The basic classifiers are decision-tree classifiers with at least 2 leaves. Haar-like features are the input to the basic classifiers, and are calculated as Fig. 2. The current algorithm uses the following Haar-like features, which is specified by its shape, position with the region of interest and the scale [5].B. SolutionIn our paper, the node used in trapped personnel detection is located in the file face_detector.py. The raw images are mainly subscribed from the appropriate UAV’s video driver. And the number of detected faces is published to other nodes. The flow chart is shown as Fig. 3. In the face detection task, the front and profile face of trapped people will be detected by using two different XML files to initialize the cascade classifier. In addition, the cascade classifiers require some initialized parameters to set their speed and the probability of correctly detecting a target. In our solution, the minSize and maxSize parameters set the smallest and largest faces that will be accepted. The ScaleFactor parameter acts as a multiplier to change the image size as the detector runs from one scale to the next. The smaller this number, the finer the scale pyramid used to scan for faces but the longer it will take on each frame. After the raw images are subscribed by our node, they are converted into grayscale version, which the algorithms of Haar cascade detector run on. Then the histogram of the gray-scale image is equalized, which is a standard technique for reducing the effects of changes in overall lighting.Fig. 2. Haar-like features.Fig. 3. Flow chart of face_detector.py nodeThe pre-processed image is sent to the detect_face() function which will be described later. If a human face is detected in this image frame, the variable self.detect_box will be set to 1, otherwise will be set to 0. The variable hits will return the total number of detected faces. Although ScaleFactor parameter is set to a suitable value, the accumulated delay from both image transmission and face detector calculation will be considerable after several frames. Therefore, we propose a method to solve this problem. Two new variables are introduced, one is misscounter_limit which means the number to count when detect no face, and the other one is hitcounter_limit which means the number to count when detect a face. We now don’t detect every frame of rawimages, but according to whether detecting a face or not, we skip hitcounter_limit or misscounter_limit frames and then detect again.C. Experiments and ResultsIn our paper, Robot Operating System (ROS) is used on Ubuntu 14.04, which is an open-source, meta-operating system for robot software development. ROS provides standard operating system services and the primary goal of ROS is to support code reuse in robotics research anddevelopment [6]. ROS distributes computation in form of “nodes”, where nodes exchange information through “topics”. “Topic” is a name of data stream and data information is defined by “message”. Implementation of “nodes” could be done in C++ or Python. OpenCV is a library of programming functions mainly aimed at real-time computer vision for 2D image processing and machine learning, which is one of the three pillars of computer vision in the ROS community. ROS passes around images in its own sensor_msgs/Image message format, but many users want to use images in conjunction with OpenCV. CvBridge in Fig. 4 is a ROS library that provides an interface between ROS and OpenCV [7].Fig. 4. Interface OpenCV with ROSIn order to ensure the real-time of our face detector, relative small time internal between the detection of two separate frames named miscounter_limit is necessary to be chosen. However, the smaller the miscounter_limit is, the more considerable the accumulated delay will be. Therefore, we need to find out the most suitable value. The experiment is as follows: Our node is set to run detect_face() function every N frames, and detects no face for totally 30 times. At the same time, another node is set to run without doing any face detection. Then we will record how many frames have been run at last in these two situations. The error between them means the accumulated delay is caused by N frames, which equals to miscounter_limit, and N is tested from 20 to 90. According to the real-time requirement and the results of experiments in Fig. 5, miscounter_limit is set to N = 40. As to the setting of the other parameter, hitcounter_limit, we can measure the relationship between its value and the time internal, which means how long the detect_face() function will run again after detecting one face. The results are as Table1 shows. The hitcounter_limit is set to N = 80. Fig. 6 shows the experimental video’s screenshots. Once the node face_detector.py find a face, it will draw a rectangle to show the detected face, and keep it for a few seconds. At the meantime, a topic named hitscount will be published to other nodes.Fig. 5. Face detector for 30 timesTABLE I. P ARAMETER HITCOUNTER _LIMITFig. 6. Video’s screenshot when detecting faceIV. T RAPPED P ERSONNEL D ETECTIONA. Flight Path PlanningAccording to the emergency service mission we mentioned in section 2, once the fire alarm is on, our quadrotor UAV will take off and detect trapped people autonomously inside the fire scene. Therefore it’s really important to set reasonable flight path planning, both for detection and evacuation guidance work. In the fire scene, we assume the environment need to be detected is tiny and clutter. The quadrotor rotating itself by 360 degrees at the original point is the easiest method to search the whole room in a short time. However it will be dangerous for quadrotor to hover at one point for a long time, since goods inside firing room may fall down and smash thes quadrotor. Therefore, the flight plan of autonomous quadrotor will be a rectangle in a small scope, as shown in Fig. 7. B. Navigation SystemNavigation & path planning require both a solution to the so-called simultaneous localization and mapping (SLAM) problem as well as robust state estimation and control methods. For solving the SLAM problem on quadrotor UAVs, variouskinds of sensors such as laser range scanners [8], monocular cameras[9], stereo cameras[10], and RGB-D sensors [11] have been explored in the past. In our paper, we prefer to choose monocular camera as onboard sensor, because they provide rich information at a low weight, power consumption, size and cost [12]. According to Jakob Engel et al., monocular cameras have the following advantages over other sensors: they provide rich information at a low weight and cost and in contrast to depth sensors, a monocular SLAM system is not intrinsically limited in its visual range, and therefore can operate both in small, confined and large, open spaces. The drawback however is that the scale of the environment cannot be determined from monocular vision alone, such thatadditional sensors, such as the IMU or air pressure sensor, are required.Our navigation system consists of three major components: a monocular SLAM implementation for visual tracking, an Extended Kalman Filter (EKF) for data fusion and prediction, and PID control for pose stabilization and navigation. All computations are performed off-board. Since SLAM updates entire map for every frame and needs sparse map of high-quality features, which is so expensive that cannot fulfill real-time requirement in UAV navigation system. We used Parallel Tracking and Mapping (PTAM) instead, which is a camera tracking system for augmented reality and first implemented by Klein and Murray [13] . PTAM provides 3D position information of the camera by using key-frames which are dense map of low quality features. PTAM also splits the tracking and mapping into two threads, as Fig. 8 shows, and implements multi-stages algorithm to fulfill the task.C. SolutionIn our paper, the node used in trapped personnel evacuation guidance is located in the file autonomous_flight.py. The flow chart is shown as Fig. 9. We combine navigation system described in Sec. IV in our autonomous flight controller. Once quadrotor take off, the node will initialize PTAM at first. Since PTAM will capture the first two frames of images as key frames, the quadrotor will fly up and down about 1 meter to make the scale estimate more accurate. We publish our flight plan to navigation system and then subscribe the feedback information /predicted_pose from it. According to the error between predicted position and desired position, this node will publish topics cmd_vel to control motors of quadrotor.The integrated solution of the emergency service mission described in Sec. II is shown as Fig. 10.Here the specific flight path planning is set as we discussed in Sec. IV inside the autonomous flight controller. Once the quadrotor takes off, navigation system will provide predicted position of itself by fusing monocular SLAM described in Sec. IV and IMU data. And the autonomous flight controller will send commands to control our quadrotor according to feedback information from navigation system. Meanwhile, the node face_detector.py in Sec. III is running simultaneously, and will report total number of trapped people to remote computer when quadrotor leave the room. In addition, once emergency situation happens, people can manual control quadrotor remotely by using joystick controller.Fig. 7. Path planning of quadrotor.Fig. 8. PTAM: mapping & tracking thread.Print # of peopleLandFig. 9. Flow chart of autonomous_flight.py node.Fig. 10. Flow Chart of Emergency Service Scenario.D. Experiments & ResultsThe hardware platform consists of a Wifi-controlled AR.Drone quadrotor with cameras attached to it, a joystick to control quadrotor in emergency situation and ground-based laptop to perform computing off-board. The hardware test system is shown in Fig. 11. In our experiment, our Monocular SLAM solution is implemented firstly in a tiny, clutter indoor environment. Fig. 12 shows the commands of linear velocity which is published by autonomous flight controller. And Fig. 13 shows the predicted position of quadrotor. The practical flight trajectory is shown in Fig. 14, which shows that the quadrotor finish the task as we expect.Fig. 11. Hardware test System.Fig. 12. Linear Velocity in Monocular SLAM Solution.Fig. 13. Predicted Pose in Monocular SLAM Solution.Fig. 14. Predicted Pose in Monocular SLAM Solution.Our solution is compared with open loop motor control, which is simpler method to run the flight path planning. In the Fig. 15, the quadrotor UAV is controlled to finish the flight path planning by sending cmd_vel to its driver directly without any feedback. However, comparing with Fig. 14, it is quite clearly that flight trajectory in open-loop motor control is not as accurate as our solution. Because the quadrotor is sensitive to wind or other factors which will cause it diverges its original flight trajectory.Fig. 15.cmd_vel in Open-loop Motor Control Solution.Fig. 16. Flight Trajectory in Open-loop Motor Control.V. C ONCLUSIONIn this paper, we have described an emergency services scenario and presented corresponding mission requirement for trapped personnel detection and evacuation guidance in indoor fire scene based on quadrotor UAV. We introduced the parrot AR.Drone quadrotor as a hardware platform and ROS as a software platform to implement the mission. Currently, the integrated solution has been developed and tested in practical indoor environment. With these experimental results, we demonstrated that our solution is feasible and effective. We believe in the future our solution is worthy for search-and-rescue work. Further improvements could be how to control several quadrotors to do search-and-rescue works in different rooms simultaneously, and adding more functions & methods for evacuation guidance, such as music soothe.References[1] S. Gupte, P. I. T. Mohandas and J. M. Conrad, "A survey of quadrotorUnmanned Aerial Vehicles,", 2012, pp. 1-6.[2] R. Mahony, V. Kumar and P. Corke, "Multirotor Aerial Vehicles:Modeling, Estimation, and Control of Quadrotor," IEEE Robotics&Automation Magazine, vol. 19, pp. 20-32, 2012-01-01 2012. [3] P. Viola and M. Jones, "Rapid object detection using a boosted cascadeof simple features,", 2001, pp. I-511-I-518 vol.1.[4] R. Lienhart and J. Maydt, "An extended set of Haar-like features forrapid object detection,", 2002, pp. I-900-I-903 vol.1. [5] "Cascade Classification,", 2015./modules/objdetect/doc/cascade_classification.htm l.[6] "Robot Operating System (ROS)," /wiki/. [7] "vision_opencv," /vision_opencv.[8] S. Grzonka, G. Grisetti and W. Burgard, "Towards a navigation systemfor autonomous indoor flying,", 2009, pp. 2878-2883.[9] M. W. Achtelik, S. Lynen, S. Weiss, L. Kneip, M. Chli, and R. Siegwart,"Visual-inertial SLAM for a small helicopter in large outdoor environments,", 2012, pp. 2651-2652.[10] F. Fraundorfer, L. Heng, D. Honegger, G. H. Lee, L. Meier, P.Tanskanen, and M. Pollefeys, "Vision-based autonomous mapping and exploration using a quadrotor MAV,", 2012, pp. 4557-4564.[11] A. S. Huang, A. Bachrach, P. Henry, M. Krainin, D. Maturana, D. Fox,and N. Roy, "Visual odometry and mapping for autonomous flight using an RGB-D camera," in International Symposium on Robotics Research (ISRR), 2011, pp. 1-16.[12] J. Engel, J. Sturm and D. Cremers, "Scale-aware navigation of a low-cost quadrocopter with a monocular camera," ROBOTICS AND AUTONOMOUS SYSTEMS, vol. 62, pp. 1646-1656, 2014-01-01 2014. [13] G. Klein, G. Klein, D. Murray, and D. Murray, "Parallel Tracking andMapping for Small AR Workspaces,", 2007, pp. 225; 1-10; 234.。
机器人应用于消防工作的说明书

机器人应用于消防工作的说明书1. 引言消防工作对于保障人民生命财产安全至关重要。
然而,传统的消防工作常常存在风险和限制。
为了提高消防工作的效率和安全性,我们开发了一种创新的解决方案,即将机器人应用于消防工作。
2. 机器人概述我们的机器人在设计时考虑了消防工作的特殊需求。
它具备以下主要特点:2.1 外形结构紧凑,方便携带和操作;2.2 耐高温、耐火、防水,能在恶劣环境下工作;2.3 配备先进的传感器和摄像头,能够实时监测火灾情况;2.4 配备灭火装置和救援工具,能够进行灭火和搜救任务;2.5 拥有自主导航和避障能力,能够在火灾区域内自动行走。
3. 机器人在消防工作中的应用机器人在消防工作中能够发挥重要作用,具体应用包括但不限于以下几个方面:3.1 火灾监测与报警机器人配备高精度的烟雾和温度传感器,能够实时监测火灾的发生和蔓延情况。
一旦检测到火灾,机器人将立即发送报警信号,通知消防人员进行相应处置。
3.2 灭火作业机器人搭载多种灭火装置,包括灭火喷射器、灭火泡沫等。
它能够通过自主导航找到火源,并进行精确的灭火作业,有效抑制火势的蔓延,为消防人员创造更安全的工作环境。
3.3 搜救与救援机器人配备探测器和摄像头,可以在烟雾浓厚的火灾区域中探测、搜索被困人员的位置。
同时,机器人携带救援工具,如救生绳索、夹具等,能够对被困人员进行救援操作。
4. 使用指南在使用机器人进行消防工作时,需要注意以下几点:4.1 操作方式机器人可通过遥控器或者预设路径进行操作。
在使用遥控器时,操作人员应接受相关培训,熟悉机器人的各项功能和操作方法。
4.2 安全注意事项机器人工作时周围应保持人员疏散,以防误伤。
机器人在高温环境下工作时,外壳表面会变热,请避免直接接触,以免造成烫伤。
4.3 维护与保养定期检查机器人的各项部件和功能,确保其正常运作。
及时更换电池和清理传感器、摄像头等,保持机器人的工作效率。
5. 结论机器人应用于消防工作可以提高工作效率,降低风险,为消防人员提供强有力的支持。
如果你是消防大队指导员请编写消防机器人操作手册

如果你是消防大队指导员请编写消防机器人操作手册
1、红外摄像头:观察机器人本体周围的环境,实现路画面(车体前、后、水炮喷射口、车体云台)无线图像传输功能。
2、消防水炮:80L每秒流量水炮,水、泡沫两用,射程75m。
3、气体采集(选配):机器人本体周围五种气体的采集(O2、CO、H2S、C12、CH4)。
4、照明:LED大功率强光照明灯。
5、声光报警:机器人本体运行状态下发出声光报警。
6、自动避障:在行进时时时检测前方障碍物,避免碰撞。
7、喷淋降温:双重水幕喷淋降温。
8、可实时的显示机器人本体电池内部的各种信息;实时显示机器人状态、机器人内外温度、有毒有害气体浓度报警信息等;控制机器人前进、后退、转向等运动;控制水炮做上、下、左、右、直流、雾化、自摆动等动作。
灭火机器人产品说明书

灭火机器人设计说明书设计者:作品内容简介通过实验调研设计了这款灭火机器人,我们设计的这款消防机器人大致构造:以耐火材料为制作材料,模型车底盘为载体,采用轮式行走结构,行走转向自如,可以在火灾现场侦察各种情况,车身四周装有传感器(主要以温度传感器和红外线扫描壁障传感器为主),以各种传感信号为主体智能机器人。
该机器人具有智能化的特点,在机器人的顶端安装了一款摄像头,它可以侦察火灾现场的各种情况,将火灾现场的各种资料通过摄像机无线传输给指挥员,便于消防人员采取相应的灭火方案,特别对于消防员无法靠近的易燃、易爆、高温、有毒、放射性物质等火场扑救有着不可替代的作用,它可以完全代替消防员去接触那些充满危险和未知的火灾现场,去完成灭火和观测现场形势,避免消防员有任何的损伤。
1 研制背景及意义对于火灾,在我国古代,人们就总结出“防为上,救次之,戒为下”的经验。
随着社会的不断发展,在社会财富日益增多的同时,导致发生火灾的危险性也在增多,火灾的危害性也越来越大。
据统计,我国70 年代火灾年平均损失不到2.5 亿元,80 年代火灾年平均损失不到3.2 亿元。
进入90 年代,特别是1993 年以来,火灾造成的直接财产损失上升到年均十几亿元,年均死亡2000 多人。
实践证明,随着社会和经济的发展,消防工作的重要性就越来越突出。
随着社会与国家的发展,在经济迅速增长的同时,各种所不可避免的火灾频繁出现,给社会造成了许多隐患。
于是现在各种火灾的及时扑救已成为了迫在眉睫需要解决的问题。
救火早一刻就少一分的损失。
救援人员固然很快,但也需要一定的时间,而且进入火灾现场还有一定的危险,甚至危及生命。
近几十年中,大量的高层,地下建筑与大型的石化企业不断涌现。
由于这些建筑的特殊性,发生火灾时,不能快速高效的灭火。
为了解决这些为题,尽快救助火灾中的受害者,最大限度的保证消防人员的安全,我们集思广益,研制了一种简易方便的灭火机器人。
该机器人方便实用,易于操作,综合起来有以下几个优点:1.无生命损伤性。
无人机在消防救援中的应用及操作技巧
无人机在消防救援中的应用及操作技巧自动外文翻译的无效率和不准确性会严重影响正文质量,这是因为我只能回答具体问题而不是提供整个文章。
根据你提供的标题,我可以为你提供一些关于无人机在消防救援中的应用及操作技巧的信息。
请根据这些信息自行撰写文章。
无人机在消防救援中的应用及操作技巧简介:随着科技的发展和无人机技术的不断提升,无人机在各领域中的应用越来越广泛。
在消防救援领域,无人机的应用已经成为一种重要的技术手段,能够大大提升救援效率和成功率。
本文将介绍无人机在消防救援中的应用场景和操作技巧。
应用场景:1. 火情监测与侦查:无人机配备高清红外摄像头和热成像设备,能够实时监测火情,提供高清图像和视频,帮助消防员了解火场情况,以便采取恰当的救援措施。
2. 火场勘察与搜救:无人机可以飞越火场,进行全面勘察,并通过搭载的传感器,搜索火场中的受困人员,并将其位置传给救援人员,以便及时救援。
3. 消防救援物资运输:无人机能够快速将急需的救援物资运送到人员无法到达的地方,如高楼大厦的顶部或地形复杂的山区,提高了物资的运输效率和安全性。
4. 环境监测与警戒:无人机可以在火场周边进行环境监测,检测有毒气体和有害物质的浓度,及时警示消防人员避免中毒和二次灾害的发生。
操作技巧:1. 飞行前的准备工作:在进行消防救援任务前,必须检查无人机的电池电量是否充足,无人机的传感器和摄像头是否正常工作,以确保无人机在任务中能够正常运行。
2. 确定飞行路线和高度:根据任务需求和火场的具体情况,选择合适的飞行路线和高度,以便进行火情监测、勘察和搜救工作。
3. 实时数据传输和信息共享:利用现代化的数据传输技术,将无人机获取的图像和视频实时传输给指挥中心和救援人员,以便他们及时了解火场情况,做出正确的决策。
4. 飞行操作的稳定性和准确性:在操作无人机时,要注意保持飞行的稳定性和精确性,避免碰撞或误操作导致无人机损坏或任务失败。
5. 安全意识和法律遵守:在进行消防救援任务时,无人机操作人员要时刻保持安全意识,严格遵守相关法律法规,在保证任务完成的前提下,最大限度地减少安全风险和人员伤亡。
消防无人机使用说明书

消防无人机使用说明书(总17页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除RB-186六旋翼无人机飞行系统操作说明书2目录I.系统简介: (2)II.飞行参数 (2)III. ...................................................... 无人飞行器系统组成4A.系统组成 (4)B.飞行系统 (4)C.地面控制系统 (6)D.图传系统 (7)1.数字微波传输系统 (7)IV.操作说明 (8)A.飞行器的安装 (8)1.飞行器组件 (8)2.主机图示 (9)3.电池图示 (9)4.机臂安装 (10)5.电池安装 (11)B.遥控器的操作 (13)C.地面站的操作 (13)1.面板示意图 (13)2.4G转发系统 (15)I.系统简介:RB-186型六旋翼无人飞行器系统是一款多功能便携式无人飞行器。
RB-186机身接狗均由碳纤维材料构成。
机架、上盖、支臂、起落架、电机架等皆为轻强结构设计。
其中六个支臂采用直连式结构,飞行姿态更加稳定。
带载起飞重量小于18公斤,最大外形尺寸小于20厘米。
采用插臂式结构,展开时间迅速,通电等候GPS卫星定位几分钟即可升空飞行。
实为一款使用性极强的六旋翼飞行器。
系统还可实现数字微波图像传输及4G图像转发功能,能够将无人机拍摄的图像实时回传到千里之外的指挥中心。
II.飞行参数部件规格备注螺旋桨18英寸电机6026/290KV防水无刷电机电子调速器40A/400Hz电池组16000mAH/6S1px1锂聚合物电池支臂结构变径插臂式机身/支臂/起落架航空碳纤维材料机舱盖航空透玻材料外形尺寸(cm)50(高)x170(宽)III.无人飞行器系统组成A.系统组成RB-186有着非常完备的系统配置。
包含:※飞行系统※地面控制系统※图传系统B.飞行系统※动力系统简介动力系统是由旋翼、电机、电速调器、电池组等组成、采用了六支18英寸旋翼,旋翼由碳纤维材料构造,并采用湿法糊制固化成型,轻质而高强度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RB-186六旋翼无人机飞行系统操作说明书目录I.系统简介: ........................................... 错误!未定义书签。
II.飞行参数............................................. 错误!未定义书签。
III. ...................................................... 无人飞行器系统组成错误!未定义书签。
A.系统组成............................................ 错误!未定义书签。
B.飞行系统............................................ 错误!未定义书签。
C.地面控制系统........................................ 错误!未定义书签。
D.图传系统............................................ 错误!未定义书签。
1.数字微波传输系统.................................. 错误!未定义书签。
IV.操作说明............................................. 错误!未定义书签。
A.飞行器的安装........................................ 错误!未定义书签。
1.飞行器组件........................................ 错误!未定义书签。
2.主机图示.......................................... 错误!未定义书签。
3.电池图示.......................................... 错误!未定义书签。
4.机臂安装.......................................... 错误!未定义书签。
5.电池安装.......................................... 错误!未定义书签。
B.遥控器的操作........................................ 错误!未定义书签。
C.地面站的操作........................................ 错误!未定义书签。
1.面板示意图........................................ 错误!未定义书签。
2.4G转发系统....................................... 错误!未定义书签。
I.系统简介:RB-186型六旋翼无人飞行器系统是一款多功能便携式无人飞行器。
RB-186机身接狗均由碳纤维材料构成。
机架、上盖、支臂、起落架、电机架等皆为轻强结构设计。
其中六个支臂采用直连式结构,飞行姿态更加稳定。
带载起飞重量小于18公斤,最大外形尺寸小于20厘米。
采用插臂式结构,展开时间迅速,通电等候GPS卫星定位几分钟即可升空飞行。
实为一款使用性极强的六旋翼飞行器。
系统还可实现数字微波图像传输及4G图像转发功能,能够将无人机拍摄的图像实时回传到千里之外的指挥中心。
II.飞行参数III.无人飞行器系统组成A.系统组成RB-186有着非常完备的系统配置。
包含:※飞行系统※地面控制系统※图传系统B.飞行系统※动力系统简介动力系统是由旋翼、电机、电速调器、电池组等组成、采用了六支18英寸旋翼,旋翼由碳纤维材料构造,并采用湿法糊制固化成型,轻质而高强度。
旋翼设计经由无数次测试和优化改进,气动性能符合空气动力学原理。
配合外转子无刷低速高效电机和特制的400Hz电子调速器,可在各种复杂的环境下安全飞行。
动力电池组采用了6S1P1封装方式,内置高能量锂聚合物电池。
该电池组除给动力系统提供强劲电源外,同时,还利用DC/DC直流转换技术给自动驾驶仪、陀螺稳定云台、机载设备、测控链路设备、图传设备等提供电源。
※飞控系统飞控系统安装有三轴电子陀螺、三轴加速计、高精度数字气压计、精密电子罗盘、GPS天线及模块等各种传感器。
飞控软件系统能根据飞行器本身的姿态变化和位置变化发出控制指令,从而自动调整飞行器平衡并锁定高度和位置。
也可以接受地面遥控器或者地面指令信息,执行各种任务动作(接受包括对飞行器姿态指令和对机载设备的控制指令)。
※测控链路装备了专业的数传,以完成双向数据传输任务。
双向数据传输的测控链路能可靠地实现飞行数据下传和获取飞行参数功能。
※ A 遥测飞控系统可将飞行器的姿态、位置、高度、速度、航向以及动力电压等各种数据参数,通过测控链路实时下传到地面遥控器或者地面工作站。
※ B 遥控(遥控器详细操作说明,请参考随机包装附件)飞控系统通过测控链路的实时上行指令传输,可以操作完成如下功能:※原地自动降落※地图指点飞行※一键返航自动降落※快速设置“目标点”环绕飞行除自动驾驶之外,同时也支持手控驾驶(需地面遥控器设备支持)。
手控驾驶更能精细操控飞行。
在飞行器的前进、后退、上升、下降、左右旋转等精细操作时,须使用遥控器操作。
高配的遥控器设备除上述飞行器控制功能之外,还可以完成诸如:云台的滚转、俯仰调整;光学机载设备的镜头变焦/跟焦、照片拍照、视频记录控制;投放装置的自动投放以及自动起降、一键返航等功能。
在空域条件差、气象环境恶劣、GPS信号不稳定、起降场地不满足起降条件、狭小空间飞行、室内飞行以及其他不适合自动飞行的场合下,可配合遥控器使用。
※安全系统作为一种升空的飞行器,RB-186具有完善的自我安全保护系统。
※在GPS信号不稳定或者是落时,会保持平衡姿态,直到有人救援或电池耗尽而自动迫降;※在遥控信号受到干扰或中断时,会启动返航降落功能。
※在机载电池低落或不足时,会首先报警(在遥控器和地面站上均有报警)。
C.地面控制系统具备英寸 IPS1920x1200 超高物理分辨率显示器,强光下依然可视。
面板一体化设计,支持有线网络接入,AV音视频输入和输出,高清图像HDMI输出,DVR 实时记录与回放,支持 433Mhz、900Mhz、和遥控遥测通讯设备扩展。
功能齐备的 8-14 通道遥控器具备 2 个三段开关、4 个两段开关和 2 个旋钮开关,可自由分配通道。
采用了高速度,高分辨率,优化的制式。
同时有教练功能的基本配备,支持 Rlink等433等增程设备。
系统集成 FR632 32 频道冗余分集双路接收机,接收频率 ~,视频输出电平为 1V ±75Ω,音频输出电平 ~10kΩ,电视制式 PAL/NTSC/SECAM(自动识别),天线接收灵敏度<-92dBm电源(15dBuV),高亮 LED 数字显示工作频道,独特的频道一键搜索功能,自动搜索回传图像。
直观显示系统电压,飞行计时等工作参数。
超大 12V30000MAH 大容量电池,220V 市电接入充电,安全开关保障,电池内部具备智能过充过放保护,户外续航时间 5 小时专业安全防护箱,抗压抗爆,防水防蚀。
D.图传系统1.微波传输系统发射机技术参数功耗700MA/12VIV.操作说明A.飞行器的安装1.飞行器组件2.主机图示3.电池图示4.机臂安装机臂的安装:请留意机臂接口处的编号,应与飞行器机臂接口处的编号相对应,如“CH1”应与“CH1”对接。
接口插紧以后,将法兰环顺时针拧紧即可完成机臂的安装。
六个机臂安装方法相同。
5.电池安装将电池仓的搭扣打开,即可打开电池仓盖。
将飞行器电池按如图所示方向,放入电池仓,插好电源接头,重新盖好电池仓盖即可完成飞行器主机的安装。
此时飞行器处于待机状态,等待遥控器或者地面站的飞行指令。
B.遥控器的操作遥控器掰杆即可开始飞行操作。
注:1、在开阔的场地飞行:飞行时请远离建筑物、树木、高压线以及其他障碍物,同时远离水面、人群和动物。
2、飞行过程全程操控:即时在使用自动飞行/降落和自动返航功能时,也请保持遥控器在手中,以随时控制飞行器。
详细遥控器操作,请操作随机附送的遥控器操作手册。
C.地面站的操作1.面板示意图上面板示意图下面板示意图整体安装完成示意图2.4G转发系统面板示意图(注意,务必在插上SIM卡和SD卡后,将面板锁扭到LOCK 位置,4G转发设备才可以正常工作!!!)LED指示灯和状态说明【PWR】电源输入状态指示灯。
LED灯常亮表示系统电源工作正常。
【ERR】故障指示灯。
LED灯亮表示SD卡发生故障,LED灯灭表示系统工作正常。
【REC】录像工作指示灯。
LED灯亮表示当前正在录像。
【VLOS】视频丢失报警灯。
LED灯亮表示四路视频输入发生视频丢失,LED灯灭表示视频输入正常。
【SD】SD卡工作指示灯。
LED灯常亮表示SD卡工作正常。
LED灯灭,表示无SD卡或SD 卡不正常。
【COM】用于扩展无线通信功能的工况指示。
有通讯模块时常亮,无通讯模块是长灭。
当有数据传输时闪烁。
SD卡接口说明【SD卡插槽】:用于记录录像数据,配置文件更新及升级。
其他接口说明【IR】遥控输入:用于接收用户遥控器的信号。
【USB口】:用于U盘导入导出数据或升级。
产品面板上没有直接的控制按钮,需要使用遥控器配合操作。
遥控器的按键说明如下:数字键:用于在系统设置界面上输入数字。
方向键:用于在选择、数据区域和图符间光标的移动,按【ENTER】键选中,按【RETURN】键返回。
遥控器按键及功能介绍:数字键区:【0-9】键:在设置状态下,数字输入键用于选择数字。
在直通/回放时,1、2、3、4键用于通道之间的切换,按 0 键返回4通道画面。
【+】、【-】键:调整模拟量时使用。
设置菜单导航:、:上、下光标方向移动键;、:左、右光标方向移动键;【ENTER】键:在设置状态下,表示选择和保存;在回放状态下,按【ENTER】键可在屏幕上显示“显示设置”菜单中选择ON的参数。
其它功能键:。