140 并联机床实验台总体结构设计(SW)
并联机床实验台总体方案毕业设计

摘要随着信息技术的进步和全球化制造技术的进步,企业为了提高自身的竞争力,要求配置效率更高成本更低的加工设备,而传统机床在未来的加工业中会遇到难以克服的困难,例如在高速加工中(轨迹速度达到50m/min)和高效空间曲面加工及机床的通用性方面将无法满足现代加工技术的要求。
因此探索和研究一种现代化机床具有十分重要的意义。
虚拟轴机床与传统的串联式数控机床相比具有很多优越性。
传统数控机床各自由度是串联相接的,呈悬臂结构,且层叠嵌套致使传动链长,传动系统复杂,累计误差大,而精度低,成本昂贵,至今多数机床只是4轴联动,极少5轴。
而虚拟轴机床的并联式加工中心结构特别简单,传动链极短,刚度大、质量轻、切削效率高、响应快,特别是很容易实现六轴联动,因而,能加工更复杂的三维曲面,且其加工精度和加工粗糙度都直接由控制程序来保证,因此,硬件成本低,而软件附加值高,是一种技术附加值极高的机电一体化产品。
此研究课题针对现今的机加工趋向,制定了设计一部并联机床实验台的任务,作者与合作人共同设计。
其中的并联部分分配给了合作者,作者主要负责并联机床实验台的总体框架结构设计。
平台大致由并联机构——三根并联丝杠(驱动电机)、铸铁机架、装卡平台和电主轴以及弹簧铣夹头组成。
关键词:并联机构、虚轴加工、雅可比矩阵、正解算法AbstractWith the progress of the information technology and the development of the global manufacturing techniques, enterprises require more efficient and lower cost machines by reason of enhancing their competitive ability. But conventional machine tools will encounter many difficulties which are hard to overcome in the future, for instance of high-speed machining ( path speed exceeding 50m/min)and high efficient space curved surfacing machining as well as flexibility of machines. Thus, it is very important to explore and study kind of modern machines.Be compared to the normal numerical control machine tool, it has larger rigidity, stronger carrying capacity, smaller error, higher precision, smaller ratio of self-weight and load, better dynamical capacity, less investment of hardware, but stronger function of software. All of these show its high additional technical valve.This research topic for the current trend of the processing machine, developed a design of a parallel machine test-bed task, which the Author co-design and a partner. Some of them parallel to the allocation of the partner, the author mainly responsible for the PMT test-bed framework of the overall structural design.Platform from roughly parallel bodies - three parallel screw (motor driven), cast iron rack, with card platform and Spindle and milling chucks of spring.Key words:parallel instruction, virtual axis processing, Jacobian Matrix, positive solution algorithm目录第1章绪论 (1)1.1课题背景与意义 (1)1.2并联机床发展历史及现状 (2)1.3本文主要研究内容 (5)第2章重要零部件选型 (6)2.1依照主轴功率确定电主轴型号 (6)2.2选择主轴下部刀具夹头 (7)2.3选择工件的装卡方式 (8)第3章实验台支承部分及其连接的方案 (11)3.1机架的设计方案 (11)3.2铸造机架的材料及热处理 (14)3.3机架的截面形状、壁厚及周边筋的布置 (14)3.4立柱与底座的连接方式 (16)3.5底座的造型 (16)第4章实验台驱动电路 (17)4.1电路布线方案 (17)4.2电路控制要求 (17)4.3电路控制连线原理图 (17)第5章实验结果及三维建模 (18)5.1设计并联实验台结果 (18)5.2实验台SOLIDWORKS建模 (18)第6章总结与展望 (19)参考文献 (20)致谢 (20)第1章绪论1.1课题背景与意义为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(ParallelMachineTool),又称虚(拟)轴机床(VirtualAxisMachineTool)或并联运动学机器(ParallelKinematicsMachine)。
数控机床的结构设计与总体布局
PPT文档演模板
数控机床的结构设计与总体布局
•6.2 数控机床的总体布局
6.2.1 总布局与工件形状、尺寸和重量的关系; 6.2.2 运动分配与部件的布局; 6.2.3 总布局与机床的结构性能; 6.2.4 自动换刀数控卧式镗铣床的总布局; 6.2.5 机床的使用要求与总布局; 6.2.6 数控机床总布局的其它趋势。
PPT文档演模板
数控机床的结构设计与总体布局
2.满足机床刚度和抗振性的要求 ● 具有抵抗外载荷的能力; ● 抵抗受迫和自激振动的能力; ● 改善机床机构。
PPT文档演模板
数控机床的结构设计与总体布局
3.减少热变形要求 ● 减少发热 ● 控制温升 ● 改善机床结构
• 数控机床受热变形与切入方
PPT文档演模板
数控机床的结构设计与 总体布局
PPT文档演模板
2020/11/21
数控机床的结构设计与总体布局
第六章 数控机床的结构设计
6.1 概述
6.1.1 对数控机床机械机构的要求 6.1.2 提高机床结构刚度 6.1.3 提高机床的抗振性 6.1.4 提高低速进给运动的平稳性和运动精度
PPT文档演模板
数控机床的结构设计与总体布局
➢合理选择构件的结构形式; ➢合理的结构布局; ➢构件变形补偿。
PPT文档演模板
数控机床的结构设计与总体布局
•6.1.2 提高机床结构刚度
• ➢合理选择构件的结构形式
•正确选择截面的形状和尺寸 • 形状相同的断面,当保持相同的截面积时,应 减小壁厚,加大截面的轮廓尺寸; • 圆形截面的抗扭刚度比方形截面的大,抗弯刚 度则比方形截面的小; • 封闭式截面的刚度比不封闭式截面的刚度大很 多; • 壁上开ZL将使刚度下降,在孔周加上凸绿可使 抗弯刚度得到恢复。
毕业设计名称

毕业设计名称【篇一:往届毕业设计课题名称】【篇二:毕业设计课题名字】.杠杆工艺和工装设计2.活塞的机械加工工艺,典型夹具及其cad设计3.过桥齿轮轴机械加工工艺规程4.fa311a一三排罗拉支架加工工艺设计。
5.ca6140车床后托架加工工艺及夹具设计31001-后托架6.whx112减速机壳加工工艺及夹具设计7.wh212减速机壳体加工工艺及夹具设计8.ca6140拔叉零件的加工工艺及夹具的设计9.ca6140车床齿轮工艺规程与夹具设计10.拖拉机拔叉零件的加工工艺及夹具的设计11.拨叉80-08的加工工艺及夹具设计12.拨叉(12-07-05)加工工艺及夹具设计13.ca6140拨叉83001-8300914.变速器换档叉的工艺过程及装备设计15.29323联轴器的加工16.后钢板弹簧吊耳加工工艺及夹具设计17.连杆孔加工工艺与夹具设计18.连杆体的机械加工工艺规程的编制19.锡林右轴承座组件工艺及夹具设计20.内齿圈成组数控加工工艺及其钻床夹具设计21.溜板工艺极其挂架式双引导镗床夹具22.3l-108空气压缩机曲轴零件的机械加工工艺及夹具设计23.挂轮架轴工艺过程及工装设计24.道奇t110总泵缸加工25.共轭凸轮的设计制造(cadcam)及工艺26.空压机吸气阀盖头加工工艺编程及夹具27.ca6140车床齿轮工艺规程与夹具设计28.点焊机上电极臂机械加工专用夹具29.变速齿轮箱(394)加工工艺分析和编程30.ca6136车床手柄座工艺及夹具设计31.三用阀右阀筒工艺规程及夹具设计32.美国赛车连杆工艺规程编制33.天线塑胶主体件加工工艺的设计与制造34.超细长轴车削加工工装设计35.轴套零件的机械加工工艺规程及夹具设计36.箱体零件的机械制造工艺与夹具设计37.方向机壳钻夹具设计38.轴承座加工工艺及夹具设计39.活塞结构设计与工艺设计(课程设计)40.750发动机前机体机加工艺及钻模设计41.nf125曲轴左部零件的机加工艺及铣床夹具设计43.机器人大臂支耳加工工艺设计44.蜗轮减速器机盖加工工艺及部分工装设计45.齿轮泵后盖加工工艺与钻6-?14联接孔夹具设计模具类课题130.塑料后盖注塑模设计131.pp(聚丙烯共聚物)直弯管的设计。
(完整版)组合机床总体设计
2009年5月23 日目录第一部分组合机床总体设计 (3)一、工艺方案的制定 (3)1.1零件工艺基面的选择 (3)1.2 加工工艺分析 (3)1.3 孔切削用量的选择 (3)二、机床配置型式和结构方案的确定 (4)三、组合机床方案图纸设计 (4)3.1被加工零件工序图 (4)3.2加工示意图 (5)3.2.1加工示意图的编制步骤 (6)3.3组合机床生产率的计算 (11)3.3.1生产率的计算和生产率计算卡的绘制 (11)3.4机床联系尺寸图的绘制 (13)3.4.1机床主要联系尺寸的确定 (14)第一部分组合机床总体设计一、工艺方案的制定1.1零件工艺基面的选择由于被加工零件(缝纫机体)是箱体类零件,所以我选择了“一面二孔”的定位方法。
该方法有以下特点:a、很简便的消除工件的六个自由读,使工件获得稳定的固定位置;b、有同时加工五个面的可能。
既能高度集中加工工序,又有利于提高各面上孔的位置精度;c、该方法可以作为从粗加工到精加工的全部工序加工的基准,使整个工艺过程实现基准统一;d、该方法使夹紧方便,夹紧机构简单。
容易使夹紧力对准支承,消除夹紧力引起工件变形对加工精度的影响。
为了保证零件的加工精度及技术要求,工艺基面必须规定相应的公差。
根据缝纫机体零件的大小,定位销孔径选择∅16,太小时,定位销很细,加工中易受力产生较大的变形。
销孔的精度为2级,两销孔中心距定为321毫米,其公差为±毫米。
0.061.2 加工工艺分析由于被加工零件只需要钻孔,所以该机床只有一个钻孔加工工艺。
而且钻孔深度不大,属于一般钻孔。
1.3 孔切削用量的选择由于该缝纫机体是铸铁件,而且硬度大概在200~241左右,根据下表选取切削用量。
表1用高速钢钻头加工铸铁件的切削用量二、机床配置型式和结构方案的确定由于被加工的缝纫机体是一个箱体件,一次只加工一个,生产率要求不是很高,所以我选择了单工位组合机床,而且该零件孔中心线与定位基准面平行,而且需要同时加工两个面,因此选择单工位组合机床中的卧式双面组合机床。
机械工程及自动化精品毕业设计并联机床实验台总体结构设计开题报告
并联机床实验台总体结构设计开题报告班级(学号):机姓名:指导老师:一、选题综述1、理论意义三连杆虚拟轴数控机床的出现被认为是本世纪最具革命性的机床设计突破。
如果充分发挥这种新型机床在结构上的优势,就有可能为大幅度地提高机床的性能开辟一条新途径。
虚拟轴机床不太适合加工大范围、多坐标运动的零件。
但从另一个角度看,在实际生产中需要多坐标加工的复杂零件毕竟是少数,而占主导地位的还是普通常规零件的加工。
因此,研究如何利用虚拟轴机床的结构特点,在常规零件的高速、高效加工上发挥其优势,将更具有实际意义。
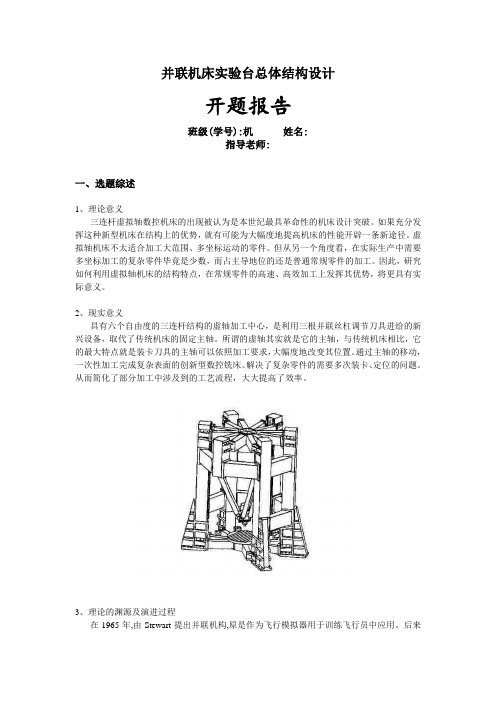
2、现实意义具有六个自由度的三连杆结构的虚轴加工中心,是利用三根并联丝杠调节刀具进给的新兴设备,取代了传统机床的固定主轴。
所谓的虚轴其实就是它的主轴,与传统机床相比,它的最大特点就是装卡刀具的主轴可以依照加工要求,大幅度地改变其位置。
通过主轴的移动,一次性加工完成复杂表面的创新型数控铣床。
解决了复杂零件的需要多次装卡、定位的问题。
从而简化了部分加工中涉及到的工艺流程,大大提高了效率。
3、理论的渊源及演进过程在1965年,由Stewart提出并联机构,原是作为飞行模拟器用于训练飞行员中应用。
后来由澳大利亚著名机构学教授Hunt在1978年提出,可将Stewart平台机构应用到并联机构中应用。
从此,并联机构的研制与开发工作开始了。
经过数十年的探索,并联机构的研究已从基础理论工作过渡到实践应用中。
并联机构在工业上、在航空上、在航海上、在地下工程方面及在微电子机械系统(MEMS)都得到广泛的应用。
特别是在机械加工领域的实际应用更是令人瞩目的,可用于砂轮或铣刀打毛刺、倒角、钻油孔、低精度焊接、自动装配的压配合等。
并联机床从问世以来经过了几年的发展,经历了一个由快速发展到稳步研究的发展过程,随着人们对并联机床的认识越来越深入,并联机床相关技术的研究和开发工作的步伐正逐渐趋于平稳。
研究人员认识到并联机床与传统机床相比所表现出的鲜明的特有优势,这鼓舞着国内外众多研究机构和机床厂商坚持不懈地积极从事并联机床技术的研究和开发工作;另一方面,经过几年的研究,研究人员也发现并联机床存在一些缺陷,同时并联机床在较多方面的理论研究和应用技术研究尚不够成熟,还有很多难题要突破。
组合机床总体及主轴箱的设计

1前言1.1研究的目的和意义主轴箱是选用通用零件,按专业要求进行设计的。
它通过按一定速比排布传动齿轮,把动力从动力部件——动力头、动力箱、电动机等传递给各工作主轴,使之获得所要求的转速和转向。
主轴箱主轴前端外伸部分和机床刀具装置连接,从而完成被加工零件。
目的是熟练利用CAD绘图软件进行绘图,掌握基本的设计方法和能力,为以后的学习和工作打下良好的基础。
研究汽缸盖钻铰组合机床不但有助于汽缸盖的加工水平提高,从而提高我国的汽车生产水平,而且对我国组合机床的发展也有重要意义。
1.2国内外研究现状我国的组合机床产业发展比较晚,原因之一是我国整体的工业发展就比较晚,其次我国的工业水平已经落后了一大截。
组合机床的发展是由汽车产业的带动,由专用机床发展而来的。
改革开放后,我国的组合机床产业得到了很大的发展,特别是民营企业对发展组合机床起到了很大的作用,他们的设计和改良使得组合机床的效率和加工水平得到了极大的提高。
我国的组合机床主要优势在于劳动力密集,缺点是精度不高,没有什么科技水平。
工业革命后,国外的工业发展很快,组合机床的发展更是如此。
由于他们的起步早,发展到现在,组合机床的种类繁多,可以满足用户和生产的各种需求。
国外的组合机床自动化程度高,广泛使用了数控技术,不仅提高了生产效率,而且对操作人员的安全有保障。
1.3研究内容和方法组合机床总体设计是针对具体的被加工零件,在选定工艺方案和结构方案的基础上,进行方案图纸设计,本设计要求完成机床联系尺寸图、被加工零件工序图、加工示意图。
主轴箱传动系统是多轴、多齿轮、多排次的复杂齿轮传动系统。
在完成组合机床总体设计之后,利用CAD绘图软件设计有四根主轴的主轴箱,主轴的转速分别为200r/min。
根据所提供的技术数据,选择主要通用部件,然后按照组合机床设计步骤进行:绘制机床总图、加工工序图、计算切削用量及绘制加工示意图、主轴箱传动系统设计(4轴n=200r/min),最后绘制主轴箱装配图和主要零件图,并写出设计说明书。
机械专业毕业论文题目汇总
机械专业毕业论文题目汇总1、葵花脱粒机的设计2、螺旋输送机设计3、码垛机器人机械部分的设计4、棉花采集机械手的设计5、诺基亚 6600 手机前盖注塑模具设计与动画演示6、爬管式切割装置结构设计7、散料输送皮带机设计8、单段锤式破碎机的设计9、汽车 U 型螺栓拆装机的设计10、汽车自动清洗系统的设计11、球轴承内圈超精研磨机的设计12、全封闭输送机的设计13、全路面起重机的设计14、手机外壳注塑模计算机辅助设计与制造15、英寸钢管热浸镀锌自动生产线设计16、桥式起重机控制线路设计17、普通货车制动器设计18、机架现场扩孔机设计19、Ⅱ型皮带机设计20、型双动拉伸压力机的设计21、型凝汽式汽轮机调节系统的设计22、笔记本电脑主板装配线 ( 输送带 ) 及其主要夹具的设计23、拨叉加工自动线设计24、播种机设计25、插秧机系统设计26、茶树重修剪机的开发研究27、柴油机专用换向阀工艺结构设计28、大型水压机的驱动系统和控制系统29、带式输送机传动滚筒的防滑处理30、带式输送机传动装置设计31、单轨抓斗起重机设计32、弹簧 CAD 软件的开发33、地下升降式自动化立体车库34、电动自行车调速系统的设计35、电脑主板回焊炉及控制系统设计36、钉磨机床设计37、多功能自动跑步机 ( 机械部分设计 )38、钢筋弯曲机设计及其运动过程虚拟39、管套压装专机结构设计40、滚针轴承自动装针机设计41、机器人送料机械手设计42、机械手 PLC 控制机械手设计43、机油冷却器自动装备线压紧工位装备设计44、基于 PLC 高速全自动包装机的控制系统应用45、基于普通机床的后托架及夹具设计开发46、集成电路塑封自动上料机机架部件设计及性能试验47、减速器减速器的整体设计48、减速器减速器锥柱二级传动49、减速器三级圆柱齿轮减速器50、减速器实验用减速器的设计51、减速器双齿减速器设计52、减速器同轴式二级圆柱齿轮53、减速器同轴式二级圆柱齿轮减速器的设计54、减速器运输机械用减速器55、减速器轧钢机减速器的设计56、减速器自动洗衣机行星齿轮减速器的设计57、减速器二级斜齿圆柱齿轮减速器设计58、可调速钢筋弯曲机的设计59、空气压缩机 V 带校核和噪声处理60、空压机机械系统设计61、膜片式离合器的设计62、磨粉机设计63、某大型水压机的驱动系统和控制系统64、普通式双柱汽车举升机设计65、桥式起重机小车运行机构设计66、全自动洗衣机控制系统的设计67、生产线上运输升降机的自动化设计68、石油管螺纹保护帽旋压专用设备设计69、数控轴承磨床砂轮修整装置设计70、双齿辊破碎机的设计71、双柱机械式汽车举升机72、双柱式机械式举升机设计73、四层楼电梯自动控制系统的设计74、卧式钢筋切断机的设计75、小型轧钢机设计76、液位平衡控制系统实验装置设计77、液压绞车设计78、液压式双头套皮辊机79、玉米脱粒机设计80、振动打桩锤的设计81、知识竞赛抢答器设计82、自动立体车库设计83、自动售货机设计84、设计自动弯管机85、自行车变速系统的设计86、半自动液压专用铣床液压系统设计87、单螺杆饲料膨化机的设计88、颗粒状糖果包装机设计89、螺旋千斤顶设计90、平面关节型机械手设计91、桥梁式集装箱起重机设计92、桥式起重机副起升机构设计93、设计青饲料切割机94、设计数控机床自动夹持搬运装置95、设计斜齿圆柱齿轮减速器装配图及其零件图96、自行车无级变速器设计97、压力机与垫板间夹紧装置的设计98、双头车床的液压系统设计99、内曲面砂带磨削装置设计100、滚轮式离心铸造机设计101、体自动卸料机的设计102、取物机械手的液压控制系统103、φ 300 高钢度小型棒材轧机主传动装置的设计104、人力手推式草坪割草机105、法兰盘加工的回转工作台设计106、组合机床液压系统设计107、并联机床实验台总体结构设计108、电葫芦机械系统设计文件109、蜂窝煤成型机设计110、高低压道路清洗车系统设计输出111、交流永磁直线电机及其伺服控制系统的设计112、静液压三驱伸缩臂叉车驱动方案的设计113、卷筒卫生纸自动包装机114、立体车库的内部机械结构的优化设计115、螺旋液压沉桩机机械部分设计116、喷涂机械手的设计117、啤酒桶清洗机的设计及PLC控制118、气动机械手回转臂结构设计119、五菱微车后门导滑槽液压机设计120、小型风力发电机总体结构的设计121、小型风力发电机组动力结构设计122、新型叉车门架系统设计输出123、旋转型灌装机的设计124、液压旋铆机设计125、电冰箱门体发泡自动化生产线进行改进设计126、机器人手腕及夹持器的设计127、果蔬原料去皮机设计128、汽车变速箱上盖工艺夹具设计129、双面卧式攻丝机床设计130、采煤机截割部的整体设计131、带式二级圆锥圆柱齿轮减速器设计132、飞机起落架设计133、谷物运输机传动装置设计134、可调速钢筋弯曲机的设计135、矿井水仓清理工作的机械化136、矿用液压支架的设计137、起重机总体设计及金属结构设计138、汽车差速器及半轴设计139、双螺杆压缩机的设计140、茶叶修剪机141、齿轮泵的研究与三维造型设计142、齿轮链轮套件设计143、多功能刷地机设计144、管道清灰机器人设计145、普通带式输送机的设计论文146、巧克力包装机设计147、C6410车床拨叉.卡具设计148、车床手柄座加工夹具设计149、曲轴工艺设计及夹具设计150、曲轴箱零件加工工艺及夹具设计151、铣断夹具设计152、CA6140型铝活塞的机械加工工艺设计及夹具设计153、SSCK20A数控车床主轴和箱体加工编程154、Z90型电动阀门装置及数控加工工艺的设计155、回转盘工艺规程设计及镗孔工序夹具设计156、加工涡轮盘榫槽的卧式拉床夹具157、壳体的工艺与工装的设计158、填料箱盖夹具设计159、支承套零件加工工艺编程及夹具160、柴油机连杆体的机械加工工艺规程的编制161、车床变速箱中拔叉及专用夹具设计162、电织机导板零件数控加工工艺与工装设计163、后钢板弹簧吊耳的加工工艺164、半轴机械加工工艺及工装设计165、柴油机连杆的加工工艺166、齿轮架零件的机械加工工艺规程及专用夹具设计167、惰轮轴工艺设计和工装设计168、方向机壳钻夹具设计169、分离爪工艺规程和工艺装备设计170、杠杆工艺和工装设计171、过桥齿轮轴机械加工工艺规程172、后钢板弹簧吊耳的工艺和工装设计173、机座工艺设计与工装设计174、减速箱体工艺设计与工装设计175、渐开线涡轮数控工艺及加工176、十字接头零件分析177、输出轴的工装工艺设计178、车床手柄座夹具设计179、汽车后轮轮毂的工艺工装设计180、柴油机喷油泵的专用夹具设计181、活塞结构设计与工艺设计182、USB接口插件弯曲模具设计183、Φ药瓶注塑模设计184、冰箱调温按钮塑模设计185、电机炭刷架冷冲压模具设计186、旅行餐碗注塑模设计187、手机后盖注塑模的设计188、漱口杯注塑模设计189、童心吸水杯杯盖注塑模设计190、电池板铝边框冲孔模的设计191、电风扇旋扭的塑料模具设计192、机油盖注塑模具的设计193、传动盖冲压工艺制定及冲孔模具设计194、放音机机壳注射模设计195、夹子冲压件设计196、酒瓶内盖塑料模具设计197、滤油器支架模具设计198、汽车盖板冲裁模设计199、渔具旋臂的塑料模设计200、电子送料器卡片冲压模具设计201、面机面板冲裁模具设计202、方便米饭盒盖注塑模具板203、电话机听筒外壳注射模具设计204、电话机底座注射模设计205、冲压汽车灯罩模具设计206、清新剂盒盖注射模设计207、洗衣机机盖的注塑模具设计208、钥匙模具设计209、彩色迷你塑料盆景花盆注塑模具设计210、越野车车门外板的激光焊接夹具设计211、C618数控车床的主传动系统设计212、柴油机齿轮室盖钻镗专机总体及夹具设计213、柴油机气缸体顶底面粗铣组合机床总体及夹具设计214、台式车床车头箱孔系加工镗模设计215、尾座体加工工艺及夹具设计216、加工支承套零件的夹具设计217、小型桔园开沟机设计218、小型芋头去皮机结构设计219、新型螺旋输送式洗米机设计220、油棕内果破碎分离机设计221、轴类零件机械加工工艺规程设计222、轴向柱塞泵设计(论文+DWG图纸)223、重型货车气压制动系统结构设计224、轴类零件机械加工工艺规程设计225、机床后托架加工工艺及夹具设计226、半喂入式花生摘果机的设计227、铣削组合机床及其主轴组件设计228、箱工装设计盖机械加工工艺229、橡胶切割机的改进设计230、小型件自动装箱系统设计231、车用柴油机总体及曲柄连杆机构的设计232、电火花切割机床的设计233、多房间温度、湿度检测系统的设计234、机场行李输送系统自动控制设计235、基于 PLC 的工业机械手的设计236、基于单片机的自动给水系统的设计237、建筑用垂直运输机的设计238、物料包装线模型码垛机设计(堆垛机)239、箱体零件的工艺规程及夹具设计240、旋风式选粉机的设计241、液压驱动式轿车维修升降机设计242、油压钻杆矫直机设计243、油压冲孔机设计244、轴承立体仓库机械系统的设计245、自动切肉机的设计246、微型果蔬保鲜库控制系统设计247、摩擦式离合器试验台的设计248、汽车制动系统实验台设计249、汽车 ABS 制动系统实验台控制系统设计250、纸筒卷管机的设计251、物料搬运机器人设计252、封闭板成形模及冲压工艺设计253、全自动制袋机的设计254、自动弯管机装置及其电器设计255、差速器壳的加工工艺设计256、地下铲运机传动系统的结构设计257、加工中心侧铣头结构设计258、心型台灯注塑模设计259、药品装盒机的设计260、液压板料折弯机设计261、玉米脱粒机设计262、榛子破壳机的设计263 、单级蜗轮蜗杆减速器设计264 、攻丝机三维模型设计265、试卷分拣机设计。
一种五自由度并联卧式机床构型设计 (1)

万方数据
1070
机械科学与技术
第26卷
(上接第1066页)
图3五自由度并联卧式机床的末端运动特征
图4五自由度并联卧式机床样机
6结论 以运动单元为基础,研究了机构末端输出运动
的描述方法,提出了串联机构和并联机构两种不同 的概念设计方法,最后设计了一种五自由度并联卧 式机床样机,验证了理论分析的正确性。
实现沿球面的平动,根据前面定义的几种运动单元,
显然u‘携带的运动单元为E恐,其中单元的控制要
素R:是U’单元中上下两组虎克铰中心连线所在的
线矢量。
要实现三维平动,由式(2)得
£4-+E恐=C
(10)
因此,应与u+关节串联一移动副,考虑到上式
成立的条件是口,·恐≠0,两者在串联连接时要必
须满足这一几何关系。
5五自由度并联卧式机床构型实例
5.1尸U‘U支链的设计
根据并联机构的设计原则,由式(4)知,并联机
构末端的输出运动特征等于各支链运动特征的交
集,应此,要设计具有某种运动特征的并联机构,所
选用支链的末端运动特征必须等于或包含这一运动
特征。为此,首先设计具有三平动和两转动的运
动链。
文献[6]提出一种u’复合关节,末端构件能够
8cteristic8 of the end efl.ector.
Key words:mechaIlism;t),pe syll吐lesis;conceptual de8ign;kinemadc unit
机构作为运动的载体,广泛应用在各个领域,不 同的使用领域,对其末端执行器的输出运动特性提 出了不同的要求。普遍的观点认为机构构型问题就 是按照给定的要求,设计出具有确定自由度数目和 自由度性质的机构。目前主要存在4种构型理论。 即基于自由度计算公式的列举法…、基于螺旋理论 的型综合法【2’3】、基于李群李代数的型综合法H1和 运动综合法D’。J。
机床典型部件设计(109页)
(三)主轴传动件位置的合理布置
1.传动件在主轴上轴向位置的合理布 置 合理布置传动件在主轴上的轴向位置, 可改善主轴的受力情况, 减小主轴变 形, 提高其抗振性。其主要原则是尽 量使传动力引起的主轴弯曲变形要小 ;引起主轴前端在影响加工精度敏感 方向上的位移要小。因此, 主轴上的 传动件应尽量靠近前支承布置, 有多 个传动件时, 其中最大的传动件应靠 近前支承。 根据传动件在不同的轴向位置时及传 动力Q 在不同方向作用时, 分析其不 同特点及应用范围。
3.主轴的设计要求
主轴的技术要求, 应根据机床精度标准的 有关项目制定。它应满足设计要求、工艺 要求、检测要求以及图面质量的要求, 应 尽量做到设计、工艺、测量的基准相统一 。
四、主轴滚动轴承
轴承是主轴部件中的重要组成部分, 轴承的类 型、精度、结构、配置方式、安装调整、以及润滑 和冷却等, 都直接影响着主轴部件的工作性能。
2.驱动主轴的传动轴位置的合理布置
主轴受到的驱动力Q 相对于切削力F 的方向取决于
驱动主轴的传动轴的空间位置。应尽可能将该驱动轴布 置在合适的位置, 使驱动力Q 引起的主轴变形可抵消一部 分因切削力F引起的主轴轴端精度敏感方向上的位移。对 切削力F 是旋转变化或以轴向载荷为主的主轴不在此列 。
(四)主轴主要结构参数的确定
当切削力F 和传动力Q 均作用在主轴前端时, 可使 两者方向相反, 从而使其引起的主轴前端变形部分地相 互抵消。此外, 前支承反力也较小。切削力F 和传动力 Q 均作用在主轴前端, 还可使主轴受扭长度较短, 但传 动件需要安装在前支承外面, 增加了主轴的悬伸长度, 结构上也较复杂。这种布局一般只适用于大型机床, 如 大型卧式车床、立式车床等的主轴组件。
(二)几种典型的主轴轴承配置形式
机械专业论文选题题目200个大全精选
机械专业论文选题题目200个大全精选1、铣削组合机床及其主轴组件设计2、箱工装设计盖机械加工工艺3、橡胶切割机的改进设计4、小型件自动装箱系统设计5、型桔园开沟机设计6、小型挖坑机设计7、小型芋头去皮机结构设计8、葵花脱粒机的设计9、螺旋输送机设计10、码垛机器人机械部分的设计11、棉花采集机械手的设计12、诺基亚手机前盖注塑模具设计与动画演示13、爬管式切割装置结构设计14、散料输送皮带机设计15、单段锤式破碎机的设计16、汽车U 型螺栓拆装机的设计17、汽车自动清洗系统的设计18、球轴承内圈超精研磨机的设计19、全路面起重机的设计20、手机外壳注塑模计算机辅助设计与制造21、英寸钢管热浸镀锌自动生产线设计22、普通货车制动器设计23、机架现场扩孔机设计24、型双动拉伸压力机的设计25、型凝汽式汽轮机调节系统的设计26、插秧机系统设计27、茶树重修剪机的开发研究28、柴油机专用换向阀工艺结构设计29、大型水压机的驱动系统和控制系统30、带式输送机传动滚筒的防滑处理31、带式输送机传动装置设计32、单轨抓斗起重机设计33、地下升降式自动化立体车库34、电动自行车调速系统的设计35、电脑主板回焊炉及控制系统设计36、钉磨机床设计37、多功能自动跑步机( 机械部分设计)38、钢筋弯曲机设计及其运动过程虚拟39、管套压装专机结构设计40、滚针轴承自动装针机设计41、机器人送料机械手设计42、机械手PLC 控制机械手设计43、机油冷却器自动装备线压紧工位装备设计44、基于PLC 高速全自动包装机的控制系统应用45、基于普通机床的后托架及夹具设计开发46、集成电路塑封自动上料机机架部件设计及性能试验47、减速器减速器的整体设计48、减速器减速器锥柱二级传动49、减速器三级圆柱齿轮减速器50、减速器实验用减速器的设计51、减速器双齿减速器设计52、减速器同轴式二级圆柱齿轮53、减速器同轴式二级圆柱齿轮减速器的设计54、减速器运输机械用减速器55、减速器轧钢机减速器的设计56、减速器自动洗衣机行星齿轮减速器的设计57、减速器二级斜齿圆柱齿轮减速器设计58、可调速钢筋弯曲机的设计59、空气压缩机V 带校核和噪声处理60、空压机机械系统设计61、膜片式离合器的设计62、磨粉机设计63、某大型水压机的驱动系统和控制系统64、普通式双柱汽车举升机设计65、桥式起重机小车运行机构设计66、全自动洗衣机控制系统的设计67、生产线上运输升降机的自动化设计68、石油管螺纹保护帽旋压专用设备设计69、数控轴承磨床砂轮修整装置设计70、双齿辊破碎机的设计71、双柱机械式汽车举升机72、双柱式机械式举升机设计73、四层楼电梯自动控制系统的设计74、卧式钢筋切断机的设计75、小型轧钢机设计76、液位平衡控制系统实验装置设计77、液压绞车设计78、液压式双头套皮辊机79、玉米脱粒机设计80、振动打桩锤的设计81、知识竞赛抢答器设计82、自动立体车库设计83、自动售货机设计84、设计自动弯管机85、自行车变速系统的设计86、半自动液压专用铣床液压系统设计87、单螺杆饲料膨化机的设计88、颗粒状糖果包装机设计89、螺旋千斤顶设计90、平面关节型机械手设计91、桥梁式集装箱起重机设计92、桥式起重机副起升机构设计93、设计青饲料切割机94、设计数控机床自动夹持搬运装置95、设计斜齿圆柱齿轮减速器装配图及其零件图96、自行车无级变速器设计97、压力机与垫板间夹紧装置的设计98、双头车床的液压系统设计99、内曲面砂带磨削装置设计100、滚轮式离心铸造机设计101、体自动卸料机的设计102、取物机械手的液压控制系统103、300 高钢度小型棒材轧机主传动装置的设计104、人力手推式草坪割草机105、法兰盘加工的回转工作台设计106、组合机床液压系统设计107、并联机床实验台总体结构设计108、电葫芦机械系统设计文件109、蜂窝煤成型机设计110、高低压道路清洗车系统设计输出111、交流永磁直线电机及其伺服控制系统的设计112、静液压三驱伸缩臂叉车驱动方案的设计113、卷筒卫生纸自动包装机114、立体车库的内部机械结构的优化设计115、螺旋液压沉桩机机械部分设计116、喷涂机械手的设计117、啤酒桶清洗机的设计及PLC控制118 、气动机械手回转臂结构设计119、五菱微车后门导滑槽液压机设计120、小型风力发电机总体结构的设计121、小型风力发电机组动力结构设计122、新型叉车门架系统设计输出123、旋转型灌装机的设计124、液压旋铆机设计125、电冰箱门体发泡自动化生产线进行改进设计126、机器人手腕及夹持器的设计127、果蔬原料去皮机设计128、汽车变速箱上盖工艺夹具设计129、双面卧式攻丝机床设计130、采煤机截割部的整体设计131、带式二级圆锥圆柱齿轮减速器设计132、飞机起落架设计133、谷物运输机传动装置设计134、可调速钢筋弯曲机的设计135、矿井水仓清理工作的机械化136、矿用液压支架的设计137、起重机总体设计及金属结构设计138、汽车差速器及半轴设计139、双螺杆压缩机的设计140 、茶叶修剪机141、齿轮泵的研究与三维造型设计142、齿轮链轮套件设计143、多功能刷地机设计144、管道清灰机器人设计145、普通带式输送机的设计论文146、巧克力包装机设计147、C6410 车床拨叉卡具设计148、车床手柄座加工夹具设计149、曲轴工艺设计及夹具设计150、曲轴箱零件加工工艺及夹具设计151、铣断夹具设计152、CA6140 型铝活塞的机械加工工艺设计及夹具设计153、SSCK20A 数控车床主轴和箱体加工编程154 、Z90 型电动阀门装置及数控加工工艺的设计155、斜联结管数控加工和工艺156、新KS型单级单吸离心泵的设计157、新型螺旋输送式洗米机设计158、摇臂壳体的加工工艺规程及数控159、液压电梯与立体车库的组合设计160、液压反铲装置设计161、压挖掘机行走装置设计162、液压挖掘机正铲工作装置设计163、油电混合动力汽车行星齿轮箱设计164、载机工作装置的实体建模及运动165、80T 起闭机大齿轮工艺设计与制造的设计166、X6132 型万能卧式升降台铣床的设计167、Z3040 型摇臂钻床的设计168、办公自动化系统的设计169、车用柴油机总体及曲柄连杆机构的设计170、大豆螺杆挤压膨化试验装置总体设计171、带式输送机减速器的设计172、电机转速与温升检测装置的设计173、高温火焰电视监测系统的设计174、关节型机器人腰部结构设计175、回转式固液分离机及螺旋输送机的设计176、机场行李输送系统自动控制设计177、基于PLC 的工业机械手的设计178、基于单片机的自动给水系统的设计179、建筑用垂直运输机的设计180、精密智能测硫仪的设计181、卷扬机的设计182、快速成型机的设计183、葵花脱粒机的设计184、螺旋输送机设计185、爬管式切割装置结构设计186、散料输送皮带机设计187、汽车行驶信息监控系统的设计188、汽车自动清洗系统的设计189、球轴承内圈超精研磨机的设计190、垂直循环式机械立体车库的设计191、物料包装线模型码垛推动机构的设计192、液压驱动式轿车维修升降机设计193、装载机举升机构优化设计194、摩擦式离合器试验台的设计195、汽车制动系统实验台设计196、台式钻床的自动化改造及进给系统设计197、RYA 真空乳化机控制电路设计198、城市污水处理用旋滤器室内试验装置199、岸边集装箱起重机的结构设计与PLC 控制200、10 吨桥式起重机小车总体方案选择分析及运行机构设计。
并联机床(共10张PPT)
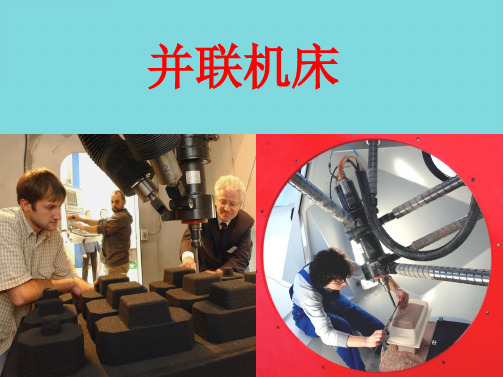
六杆并联机床
介绍一种结构新颖、高速加工用的并联运动机床。 它采用5杆并联机构和5环驱动的主轴部件,在并联运动 机构理论上有所突破,从而实现主轴部件的偏转角大于 90º,能够真正实现5轴联动、5面加工。
创新在于:首次采用5杆并联机构和5环驱动的主 轴部件,在并于90º,能够真正进行5面加工。
伺服电动机 万向铰链
环形铰链
主轴部件
滚珠丝杠
崭新的5杆配置使机床具有以下特点:
介绍一种结构1新)颖机、高床速加运工用动的并部联件运动的机床质。 量很小,采用功率小的驱动装置就可以达到很 高的加速度,所产生的惯性反作用力也非常小。 一次装夹,完成5面、5轴联动加工曲面的例子(汽车模型外形)如图所示。
2) 采用封闭框架结构和对称配置,使机床工作时产生的力 。
传统数控机床是按笛卡尔坐标将沿3个坐标轴线的移动 X、Y、Z 和绕3个坐标轴线转动 A、B、C的控制依次串联叠加,形成所需的刀具运动轨迹
尽可能相互抵消,从而保证机床的高动态性能。 。
1) 机床运动部件的质量很小,采用功率小的驱动装置就可以达到很高的加速度,所产生的惯性反作用力也非常小。 按笛卡尔坐标控制沿3个轴线的移动和绕2个轴线的转动 六轴联动的并联机床有六个自由度,可用于加工具有负杂曲面的零件。 并联机床(虚拟轴机床):有六根驱动杆并行连接在固定平台和活动平台之间,每根杆的两端均采用球面支撑,刀具装在活动平台上。
组合机床设计构想

摘要:本文旨在提出一种像搭建积木一样自由组合传统机床和并联运动机床的设想。
该种机床将根据不同的工作环境对机床的各个组件模块进行更换组合,达到满足加工要求目的。
该种机床的控制系统也可根据实际需要进行自由组合,并利用计算机仿真技术辅助完成。
机械加工时,以机床外一点为定位基准,进行加工,保证加工精度。
关键字:积木式机床并联运动机床组合模块化引言:随着计算机技术、自动化技术和机床技术的不断发展,可持续制造技术,虚拟制造技术,并联运动机床等高新技术和装备大量出现在了加工域活动中。
由于新技术和装备的应用极大的扩展了机械加工的领域和提高了机械加工的效率和性能。
无论是传统的传统串联机床以及新发展的并联运动机床都有其自身构造的自然属性存在着诸多局限性。
比如说,传统串联机床移动部件质量大、系统刚度低、刀具只能沿固定导轨进给、作业自由度偏低、设备加工灵活性和机动性不够等固有缺陷;并联运动机床存在着控制系统异常复杂,可加工的范围有限等问题。
如果在传统的串联机床与并联运动机床之间优势互补,可以克服彼此的缺陷,进一步增强机床的性能。
我们将可重构机床的思想模式借鉴过来并将虚拟现实的技术融合进来,大胆设想一种能够像拼积木一样在传统串联机床与并联运动机床之间根据实际加工的需求进行自由地组合的积木式机床。
1.传统串联运动机床与并联运动机床1.1传统串联机床与并联运动机床的概念在机构学中,机构可分为串联机构和并联机构。
串联机构(Series mechanism)由一组运动链串联而成。
它的特点是第一个运动链接受驱动器输入开始运动,再带动后面的运动链依次运动,最终由运动链n给出串联机构的输出;并联机构(Parallel mechanism)由一组有两个或两个以上的分支机构并联而成。
它的特点是所有的分支机构可同时接受驱动器输入而最终共同给出输出。
传统串联机床是以床身、立柱、横梁等作为支撑部件,主轴部件和工作台沿支撑部件上的直线导轨移动,来进行机械加工的。
数控机床的结构设计与总体布局
提高机床的抗振性措施
1. 减少机床内部振源;(动平衡、消除配合间隙、 隔振) 2. 提高静态刚度; 3. 增加构件或结构的阻尼。
18
6.1.4 提高低速进给运动的平稳性和运动精度
进给系统的低速爬行现象
措施 降低执行部件的质量 减少动静摩擦系数之差 提高传动系统的传动刚度 (扭转、拉压刚度)
32
6.2 数控机床的总体布局 6.2.6 数控机床总布局的其它趋势
机电一体化结构 控制计算机、按键、开关、显示器等集中在吊 挂按钮站
全封闭结构
33
本章结束
34
加工中心
链式刀库 主机的正前方 •对主机的操作有妨碍 •换刀机械手装在主轴箱 上 ,可以实现任意位置 换刀 • 换刀动作少 • 立柱的z向退刀动作就 是回到换刀位置的动作。
31
6.2 数控机床的总体布局 6.2.5 机床的使用要求与总布局
便于同时操作与观察
刀具、工件装卸、夹紧方便
排屑和冷却
19
6.2 数控机床的总体布局
6.2.1 总布局与工件形状、尺寸和重量的关系; 6.2.2 运动分配与部件的布局; 6.2.3 总布局与机床的结构性能; 6.2.4 自动换刀数控卧式镗铣床的总布局;
6.2.5 机床的使用要求与总布局;
6.2.6 数控机床总布局的其它趋势。
20
6.2 数控机床的总体布局
10
11
合理选择构件的结构形式
•合理选择及布置隔板
(e)交叉筋板的作用最好
12
合理选择构件的结构形式
•合理选择及布置筋条
(f)蜂窝状加强筋较好
13
合理选择构件的结构形式
提高构件局部刚度
图示为导轨和床身联结的几种形式。如果导轨的尺寸较宽时,应 用双壁联结型式如图(d)、(e)、(f)。导轨较窄时可用单壁或加厚 的单壁联结,或者在单壁上增加垂直筋条以提高局部刚度。
机床总体设计(全)

结构—龙门式机床。
3.1.4 机床总体设计
三、机床的总体结构方案设计
❖4.机床总体结构的概略形状与尺寸设计
❖进行功能(运动或支承)部件的概略形状和尺寸设计,设计的主要 依据是:机床总体布局设计阶段评价后所保留的机床总体结构布局 形态图,驱动与传动设计,机床动力参数及加工空间尺寸参数,以 及机床整机刚度及精度分配,结果是得到机床总体结构方案图。
➢机床的联系尺寸
机床的总布局是通过机床的联系尺寸图体现的。 在机床的联系尺寸中应包括:
(1) 机床的外形尺寸,长宽高; 各部件的轮廓尺寸。
(2) 各部件间的连接、配合和相关位置的尺寸。 (3) 移动部件的行程、调整位置的尺寸。 (4) 机床的装料高度、操纵台的高度尺寸。 (5) 机床主机与液压站、电气柜的间距。
2、立式机床
➢具有占地面积小,工人所 处的操作位置比较灵活的 特点;
➢如立式钻床、立式单柱坐 标镗床、立式铣床 等。
3、单臂式机床
➢适于方便地更换 点位进行加工。 但这类布局型式 与框架式相比刚 度较差,因此应 注意提高刚度。
4、龙门框架式机床
具有刚度和加工精度 高的特点。
➢适用于箱体件的平 面加工,如龙门刨 床、龙门铣床 ;
BACK
3.1.3 机床的设计步骤
❖ 总体设计
❖ 总体设计的内容
❖ 运动功能设计:确定机床所需运动的个数、形式(直线或回转)、功 能(主运动、进给运动、其他运动)及排列顺序,画出机床的运动功 能图。
❖ 基本参数设计:尺寸参数、运动参数和动力参数。 ❖ 传动系统设计:传动方式、传动原理图及传动系统设计。 ❖ 总体结构布局设计:运动功能分配、总体布局结构形式及总体结构方
组合机床回转工作台结构及控制系统设计
组合机床回转工作台结构及控制系统设计1 组合机床概述在机械制造行业当中,组合机床运用是比较广泛的,除了组合机床之外还需要使用一些其他的工艺装备。
比如模具和夹具等一些辅助道具。
使用这些工具的主要目的就是让劳动生产率得到改善和一定程度的提高。
在有的工序制作时,还需要用到一些专用的机床,这些专业机床的使用,大大的增强了工件的质量,同时也减少了劳动投入程度。
但是专用机床只能对一项特定的工件进行特定的工具,要是香进行其他工件的制作时,就得卸下重新进行安装,延长了加工的时间。
在这样的情境下,组合机床应运而生,也可以说是专用机床的一种更新换代。
组合机床大致可以概括为两类:第一类是通用原件。
通用原件是由一些起着不同作用的部件组成,包括支撑部件、动力部件、控制部件、输送部件以及辅助类部件等。
第二类是专用原件。
专用原件值得就是对一些部件进行加工的时候一对一的原件,这些原件有着固定的形状、大小等各种参数,不能被其他原件代替。
使用组合机床很大程度的缩短了设计以及制造周期,由于组1/ 5合机床的通用化程度比较高,而且通用零件都是经过很长时间的生产时间而修改定型的产品,使用性能比较稳定,有利于保证加工质量的稳定,我们需要设计的知识一些专用零部件。
2 回转工作台概述对于一般的工作来说,多次回转是输送部件中起着很重要的作用的就是分度回转工作台。
它主要的工作就是一个工件从原来的工作位置转移到另一个工作位置,进行另外一道加工。
一般情况下,一个工件被一个工作位置进行装夹时,对应的那个位置都会对相应的工件进行相对应的装夹,达到一种同步进行的效果,不至于在装夹的过程中受到影响。
回转工作台被现代企业广泛的应用,它的分类也有很多种,比如一些气压传动或者是液压传动都是根据他的传动方式的不一样来进行分类。
按照加工工件的定位方式可以分成以下几种:圆柱销或者菱形销定位、锥销定位、反靠定位、齿盘定位以及钢球定位等。
在发达国家当中,星型传动分度台被许多的企业运用。
数控设备装调实验台十字工作台结构设计

—
—
—
、
—
—
J一 一
J
1 基 准 导 轨 定 位 条 ,一 基 准 导 轨 ,一 导 轨 滑 块 , 一 2 3 4 下工 作 台 ,一 非 基准 导 轨 一 5
图 1 ( 层 ) 线 导轨 结构 图 上 直
重新设计后 , 准导 轨 的定 位 与 固定 、 基 非基 准 导轨 与基 准导轨 的距离与平行度以及两基准导轨 的垂直度 等要求 , 都 可以用 规范 有序 地 安装 、 调试 、 检测 方法 来实 现 ( 具体 过程 略) 从而使学生正确建立和使 用定位基准 的概念 、 , 规范装配
练 学 生 调 整 十 字 工 作 台 水平 度 的 技 能 。 因此 , 文 分 三 个 方 本 面依 次 说 明 问题 所 在 和解 决 办 法 。
要 解决 上述 安装 基 准 的 问题 , 是 上 下 两 层 全 部 采 用 直 一
线导轨以真实体现数控设备的结构” 二是同层 内, 准导 0; 基
12 正 确 合 理 的 设计 .
十字工作台是 实验 台训 练数控 设备维 修专业 学 生机械 系统装调技能 的主要部件 , 要求能满足该 专业学生 在数控设 备典型机械零部件 的装 配 、 安装及 精度 、 能调试 等方 面 的 性 训练 目标 。如果十字工作 台的主要 结构存在设 计 问题 , 会严 重影 响学生正确掌握数 控机床 常用机械零部 件的装拆 、 修配 和检验技能 , 以及 机械系统 的故 障诊断 与分析 、 装调 试能 安 力 , 而 影 响数 控 装 调 维 修 工 中级 证 书 的 获 得 。然 而 , 些 从 一 高校现有数控设备装 调实验 台配备 的十字 工作 台的主要 结 构存在设计不当或错误 , 因此有必要 重新合理设 计。直线导 轨组件和滚珠丝杠组件都是 十字 工作 台的 主要 结构 , 座水 底 平度调整机构则是实验 台为该部件专 门增加 的组件 , 用来训
第八章数控机床的总体布局和结构设计
第八章数控机床的总体布局和结构设计8.1 数控机床的总体布局数控机床由各类部件组成,进行机床总体布局时,一方面要从机床的加工原理(即机床各部件的相对运动关系)结合工件的形状、尺寸和重量等因素,来确定各主要部件之间的相对位置关系和配置;另一方面还应考虑机床的操作维修、外观形状、生产管理和人机关系等因素。
总体布局是设计中带全局性的问题。
对机床的制造和使用关系很大。
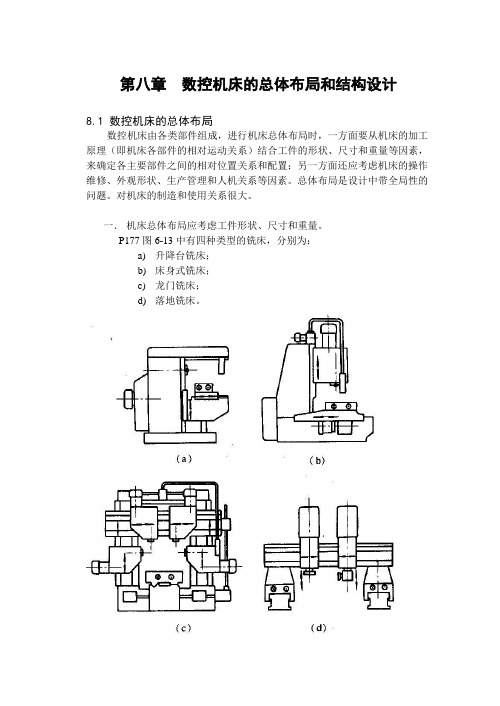
一.机床总体布局应考虑工件形状、尺寸和重量。
P177图6-13中有四种类型的铣床,分别为:a)升降台铣床;b)床身式铣床;c)龙门铣床;d)落地铣床。
a)升降台铣床:加工工件尺寸较小,重量较轻的工件,加工时刀具相对不动,由工件运动来完成三个方向的进给运动。
分别由工作台、升降台和滑板来完成。
b)床身式铣床:刚性比升降台铣床高。
它可以加工重量较重的工件,工件放在工作台上,由工作台带动作水平二方向运动,垂直上下运动改由铣头带动铣刀来完成。
相应地它可以加工比升降台铣床尺寸大、重量大的工件。
c)龙门式数控铣床。
工作台带动工件作一个方向的进给运动,其他两个方向进给由多个铣头在横梁与立柱上移动来实现。
这种结构布局使机床适用于大重量工件的加工,由于多刀加工,提高了效率。
d)落地式数控铣床。
这种铣适宜加工体积大、重量大的工件,体积大、重量大的工件由机床工作台承受压力太大,由它作进给运动也不太方便。
因此此总机床设计工件放在地上,三个方向的进给运动全由铣刀头运动来完成。
二.机床部件的布局要考虑运动的分配。
运动的分配与部件布局是机床总布局的中心问题,以镗铣数控机床为例:如需加工工件顶面,则机床主轴应设计成立式。
如需对工件的多个侧面加工,则主轴应布局成卧式。
两种机床均配以相应的旋转工作台。
注意:数控卧式镗铣床与普通的卧式镗床不同,它没有镗杆,也没有后立柱,对跨距较大的多层壁孔采用调头镗削来解决。
对于五轴联动的镗铣床布局时应遵循:a)获得较好的加工精度,表面粗糙度,较高的生产率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章 绪 论
1.1 课题背景与意义
为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在 积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属 90 年 代 中 期 问 世 的 并 联 机 床 (ParallelMachineTool) , 又 称 虚 ( 拟 ) 轴 机 床 (VirtualAxisMachineTool)或并联运动学机器(ParallelKinematicsMachine)。并联机床实质上是 机器人技术与机床结构技术结合的产物,其原型是并联机器人操作机。与实现等同功能的传 统五坐标数控机床相比,并联机床具有如下优点:
技术附加值高:并联机床具有“硬件”简单,“软件”复杂的特点,是一种技术附加值 很高的机电一体化产品,因此可望获得高额的经济回报。
目前,国际学术界和工程界对研究与开发并联机床非常重视,并于 90 年代中期相继推 出结构形式各异的产品化样机。1994 年在芝加哥国际机床博览会上,美国 Ingersoll 铣床公 司、Giddings&Lewis 公司和 Hexal 公司首次展出了称为“六足虫”(Hexapod)和“变异型” (VARIAX)的数控机床与加工中心,引起轰动。此后,英国 Geodetic 公司,俄罗斯 Lapik 公 司,挪威 Multicraft 公司,日本丰田、日立、三菱等公司,瑞士 ETZH 和 IFW 研究所,瑞典 NeosRobotics 公司,丹麦 Braunschweig 公司,德国亚琛工业大学、汉诺威大学和斯图加特 大学等单位也研制出不同结构形式的数控铣床、激光加工和水射流机床、坐标测量机和加工 中心。与之相呼应,由美国 Sandia 国家实验室和国家标准局倡议,已于 1996 年专门成立了 Hexapod 用户协会,并在国际互联网上设立站点。近年来,与并联机床和并联机器人操作机 有关的学术会议层出不穷,例如第 47~49 届 CIRP 年会、1998~1999 年 CIRA 大会、ASME 第 25 届机构学双年会、第 10 届 TMM 世界大会均有大量文章涉及这一领域。由美国国家科 学基金会动议,1998 年在意大利米兰召开了第一届国际并联运动学机器专题研讨会,并决 定第二届研讨会于 2000 年在美国密执安大学举行。1994~1999 年期间,在历次大型国际机 床博览会上均有这类新型机床参展,并认为可望成为 21 世纪高速轻型数控加工的主力装备。
目前,并联机床的发展趋势呈现如下两个特点: (1)并联机床构型的多样性 构型的多样性是并联机床的显著特点之一,每一种构型都有其自身的优缺点,都有其各 自适合的应用领域。关于并联机构构型的研究一直是人们关注的热点,设计开发出多种适用 于不同应用条件的并联机构也一直是机构学家们研究的一个重要内容。近几年,众多学者提 出了多种新机构构型,并对机构的类型和构建方法进行了系统的讨论。目前,基于串并混联、 内外副混合驱动或纯并联的少自由度机构的并联机床正逐渐受到人们的青睐,最有代表性的 基于少自由度并联机构的并联机床是瑞典 Neos Robotics 公司开发研制的 Tricept 系列。 然而,由于并联机床出现不久,并没有专用的设计开发环境,目前开发一种新型并联机 床的设计周期仍很长,因此迫切需要一个快速的设计开发平台以满足结构日趋多样的新型并 联机床的设计开发需求。 (2)并联机床设计理论和应用技术研究不断深入 虽然已开发出一些并联机床商业化样机,且有产品投入实际应用,但由于设计理论和工 程技术的研究不够成熟,目前并联机床在作业能力、作业性能等方面表现差强人意,与传统 数控机床相比存在一定差距。有关并联机构运动学设计、并联机床动力学建模与分析、精度 保证、控制技术等关键技术的研究一直在不断深入,并取得了一定的研究成果。例如, Raghavan 得出的 Stewart 平台运动学正解结论,Innocenti 和 Cheok 等人提出的运动学数 值解法;Gosselin、Merlet 和 Ji 的工作空间几何解析法,黄田和汪劲松等人提出的工作空 间边界的变心球面族包络面求交法;基于各向同性条件(局部灵活度)、动平台姿态能力、 总体灵活度指标的多种尺度综合方法;Nguyen、Lee、Liu 关于动力学建模及动态性能指标 的构造的理论结果,以及熊有伦提出的动力学优化设计策略;用不同方法建立的驱动部件误 差与终端误差之间的关系;多种运动学标定、提高机床加工精度的方法等。总之,并联机床 的各项关键技术国内外都取得了很多有价值的理论成果,在应用技术方面也取得很大进展。
我国已将并联机床的研究与开发列入国家“九五”攻关计划和 863 高技术发展计划,相 关基础理论研究连续得到国家自然科学基金和国家攀登计划的资助。部分高校还将并联机床 的研发纳入教育部 211 工程重点建设项目,并得到地方政府部门的支持且吸引了机床骨干企 业的参与。在国家自然科学基金委员会的支持下,中国大陆地区从事这方面研究的骨干力量, 于 1999 年 6 月在清华大学召开了我国第一届并联机器人与并联机床设计理论与关键技术研
1995 年 5 月 EMO 米兰展览会上,意大利 Comau 公司、日本日立精机展出了 Stewart 机 器人。
1996 年, SGI 公司开发出 UN IX 平台 Stewart 机床设计造型三维 CAD 软件包。同年 10 月,日本本田工机公司在丰田技术展览会上展出了日本第一台 Stewart 机床,用于铸锻模具的 高速加工。在 EMO97 (1997 年汉诺威国际机床展览会)上展出了 10 余件 Stewart 机床样品, 并首次进行金属工件铣削, Stewart 机床又向商品化迈进了一步。在此次展览会上,在概念上将 传统机床与新兴的 Stewart 机床从结构上划分为串联机床与并联机床,这是人类对机床机构认 识概念上的突破, Stewart 机床专用功能部件,如球铰、虎克铰、导轨、滚珠丝杠、控制器等的 专业研究开发生产迅速崛起。C IMT97 (第五届中国国际机床展览会)上,俄罗斯 Lap ik 公司展 出了 TM 750 型 Stewart 数控机床。1997 年 12 月, 清华大学与天津大学合作开发 Stewart 机床原型样机 VAMT1Y。1999 年,在 C IMT、CCMT 等国际、国内机床展览会上,国 内的五轴数控机床产品纷纷亮相,国内五轴数控机床的市场逐渐打开,随后国际机床巨头纷至 沓来,五轴数控机床的品种和数量逐年上升。
刚度重量比大:因采用并联闭环静定或非静定杆系结构,且在准静态情况下,传动构件 理论上为仅受拉压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
响应速度快:运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动 平台获得很高的进给速度和加速度,因而特别适于各种高速数控作业。
环境适应性强:便于可重组和模块化设计,且可构成形式多样的布局和自由度组合。在 动平台上安装刀具可进行多坐标铣、钻、磨、抛光,以及异型刀具刃磨等加工。装备机械手 腕、高能束源或 CCD 摄像机等末端执行器,还可完成精密装配、特种加工与测量等作业。
在 IMT94 (1994 年美国芝加哥国际机床博览会)上,美国 Giddings & Lewis 公司和 Ingersoll
铣床公司、瑞士 Geodetis 公司展出了 Stewart 数控机床样品,举世瞩目,如图 2 所示。世界各 国的研究机构和企业开始大量投入 Stewart 平台的研究与开发。9 月在美国成立 Hexel 公司, 专业从事各种类型的 Stewart 机床机器功能部件研究、开发、生产与销售,该公司的部分产品。 随后,在政府和企业的支持下,美国成立了五个国家级基地(M IT、N IST、ORNL、SNL /NM、 SNL /CA)专业从事 Stewart 机床的研究开发。
1965 年,D. Stewart 首次提出了一种 6 条腿连接基础平台与动平台的六自由度并联机床, 同时研究了其在飞行模拟器上的应用并展开了相应理论的研究,奠定了其在并联机构领域的 鼻祖地位,并联机构也被称为 Stewart 机构。典型的 Stewart 平台如图 1 所示,它由上下两个平 台和 6 个并联的、可独立自由伸缩的杆件组成,伸缩杆和平台之间通过球铰链连接,改变伸缩 杆的长度可以实现上动平台在空间的多自由度运行。
并联机床的研究方向: (1) 并联机床组成原理的研究 研究并联机床自由度计算、运动副类型、支铰类型以及运动学分析、建模与仿真等问题。 (2) 并联机床运动空间的研究 包括运动空间分析及仿真、可达工作空间求解(如数值求解法、球坐标搜索法等)、机 床干涉计算及位置分析等。 (3) 并联机床结构设计的研究 并联机床的结构设计包括很多内容,如机床的总体布局、安全机构设计、数控系统设计 (包括数控平台建造、数控系统编程、数控加工过程仿真等)。 (4) 并联机床刚度、精度、柔度、灵巧度的研究 并联机构封闭回路的特性,使并联机床较传统串联结构机床具有更高的刚度,但这个特 性引起的耦合问题,相对的形成在动力分析上很大的困扰,因此对其研究应予以足够的重视。 关于并联机床精度的研究仍是国际难题,包括机床系统硬件研究(及机床制造前精度设计和 精度描述)和系统输出精度研究(及机床制造后输出数据处理和精度评价)。并联机床柔度 的研究包括柔度分析、柔度评价指标及其在工作空间内的分布等方面。灵巧度主要研究灵巧 度指标及其分布等。 (5) 并联机床误差研究 包括误差分析、建模及误差精度保证、测量系统设计等问题。 (6) 并联机床模块设计与创建 根据工件加工的空间型和平面型,相应地把并联机床分为空间型并联机床和平面型并联 机床两大类。并联机床按功能和结构可分为以下几个功能模块:①执行模块;②机座模块(静 平台模块);③动平台模块;④机架模块;⑤定位模块;⑥驱动模块;⑦控制和显示模块; ⑧润滑与冷却模块。 (7) 新型虚拟轴数控机床的研究 虚拟轴数控机床是“要用数学制造的机床”。因为这种机床的设计与运行要用到非常复杂 的数学计算与推理。目前对于 Stewart 平台的理论研究已取得一些关键结论,还需进一步研 究 Stewart 平台的综合分析,为虚拟轴数控机床的研制提供理论基础。 (8) 并联机床控制的研究 包括高速、高精度的控制算法,刀具运动轨迹的直接控制、开放式数控系统等。虚拟轴 机床的最大特点是机械结构简单而控制复杂,因此这方面的研究在并联机床的研究机床的发展现状、未来趋势以及亟待解决的问题进行了研讨。