超小型仿生扑翼飞行器扑动控制设计
仿蝴蝶微型扑翼机飞行原理及扑翼机构研究(已处理)

仿蝴蝶微型扑翼机飞行原理及扑翼机构研究摘要微扑翼飞行器Flapping-wing micro aerial vehicles模仿鸟类或昆虫的飞行原理,具有体积小、重量轻、隐身性好等优点,被广泛使用到军用和民用领域。
本文以仿蝴蝶微型扑翼机为研究对象,首先分析凤蝶的飞行参数,在此基础上,建立了仿蝴蝶扑翼机的参数化模型,研究了仿蝴蝶扑翼机的流体和扑翼机构的运动特性。
(1)对凤蝶的扑翼飞行和微观形态进行了整理和分析,获得了凤蝶扑翼飞行的尺寸参数及运动参数,为仿蝴蝶扑翼机的数值建模和机构分析提供了数据参考。
(2)以流体仿真软件 FLUENT 为平台,采用参数化语言,建立了仿蝴蝶流体分析模型,针对解决流场的动边界这一难点,采用动网格技术,对翼型的流体动力学性能进行研究。
流体仿真结果表明:涡流是产生高升力的主要原因;在大翼展、低频率扑动前提下,扑翼幅值与产生的升力和推力成正比。
(3)以平面四杆机构为基础,用解析法设计了具有急回特性的扑翼机构,并以 solidworks 软件为平台,建立了扑翼机构的三维模型,进行了扑翼机构的运动仿真,将仿真结果与解析法设计的扑翼机构的运动特性进行比较,验证了解析法设计急回特性的扑翼机构的可行性和可靠性。
关键词:微扑翼飞行器,流体力学仿真,动网格技术,急回特性,运动仿真IAbstractFlapping-wing micro aerial vehicles mimic birds or insect flight principle, hasthe advantage of small volume, light weight, good stealth ability, etc., is widely usedin military and civil fields. Papilio is chosen to research the flapping wing flight andflight mechanism in this paper. The parametric language is used to constructedbutterfly wing model to carry on motion analysis and the design of theflapping-wing mechanism1 Researched and analyzed the flapping wing flight and micro-morphology ofthe papilio, obtained its dimension parameter and motion parameter,provided datareferences for the numerical modeling and mechanical modeling of the bionicornithopter 2The imitating butterfly fluid simulation mode is based on theparameterized modeling method on FLUENT software platform, to solve the flowfield of the moving boundary this problem, using the dynamic mesh technique,research on hydrodynamic performance of airfoil. Fluid simulation results show:eddy current is the main cause of high lift; in the large span, the low frequency,flutter premise, flapping amplitude is proportional to lift and thrust s generated3Based on the analytical method design the plane four-bar linkage, usingquick-return characteristics to design flapping-wing mechanism, and make motionanalyses. Established the three-dimensional model of the flapping wing, and mademotion simulation on solidworks software. The research results revealthat theflapping-wing mechanism motion analysis which is compared withthree-dimensional model simulated analysis is feasible and reliable Keyword: Flapping-wing micro aerial vehicles, fluid dynamics simulation,dynamic mesh, quick-return characteristics, motion simulationII南昌航空大学硕士学位论文目录目录摘要 IAbstract II第1章绪论11.1 引言.11.2 微型扑翼飞行器的研究现状及分析21.2.1 国外研究现状..31.2.2 国内研究现状..51.3 本文的研究目的及意义..71.3.1 微型扑翼飞行器的研究目的..71.3.2 拟解决的技术问题71.4 本文的内容安排..8第2章昆虫扑翼飞行原理及蝴蝶翅形态结构92.1 昆虫扑翼飞行原理.92.1.1 雷诺数..92.1.2 昆虫的飞行机理..102.1.3 蝴蝶的飞行机理..132.2 蝴蝶翅形态结构142.2.1 蝴蝶翅气动外形特质142.2.2 蝴蝶翅三维形状测量152.2.3 自由飞行时蝴蝶翅形态结构16 2.3 蝴蝶翅微观形态172.3.1 翅的表观结构182.3.2 翅的断面结构192.4 本章小结19第3章仿生扑翼模型的流场分析21 3.1 FLUENT软件简介..213.1.1 FLUENT软件求解步骤..21III南昌航空大学硕士学位论文目录3.1.2 求解控制方程223.2 翼型的流场数值计算.233.2.1 翼型建模及网格化.233.2.2 翼型的流场计算..243.3 翅翼拍动中流场的数值模拟.27 3.3.1 动网格技术.273.3.2 动态数值分析283.3.3 拍打振幅对扑翼运动的影响313.4 本章小结32第4章扑翼机构设计及建模分析334.1 扑翼机构的设计.334.1.1 扑翼机构总体设计要求..334.1.2 扑翼的实现方案..344.2 扑翼机构的运动尺度综合..354.2.1 扑翼机构方案确定.364.2.2 构件尺寸确定374.3 按解析法设计急回特性的扑翼机构..374.3.1 扑翼机构设计374.3.2 扑翼机构分析424.4 扑翼机构建模.464.4.1 零件三维建模464.4.2 零件装配与运动仿真474.5 本章小结49第5章结论与展望505.1 结论..505.2 展望..50参考文献..52攻读硕士学位期间发表的学术论文及参加的科研情况.56一、攻读硕士学位期间发表的论文..56二、攻读硕士学位期间参加的科研情况56致谢57IV南昌航空大学硕士学位论文第一章绪论第 1 章绪论1.1 引言微型扑翼飞行器Flapping-wing micro aerial vehicles以其优良的机动性、低噪音、低成本、携带方便、操作简单、可执行多种任务等功能,不论在军用还是民[1]用领域都具有十分重要、极其广泛的用途。
微型仿生扑翼机控制器设计
电子设计工程 Electronic Design Engineering
2018 年 8 月 Aug. 2018
微型仿生扑翼机控制器设计
贺雪晨,周超英,汪 超
(哈尔滨工业大学深圳研究生院 机电工程及自动化学院,广东 深圳 518055)
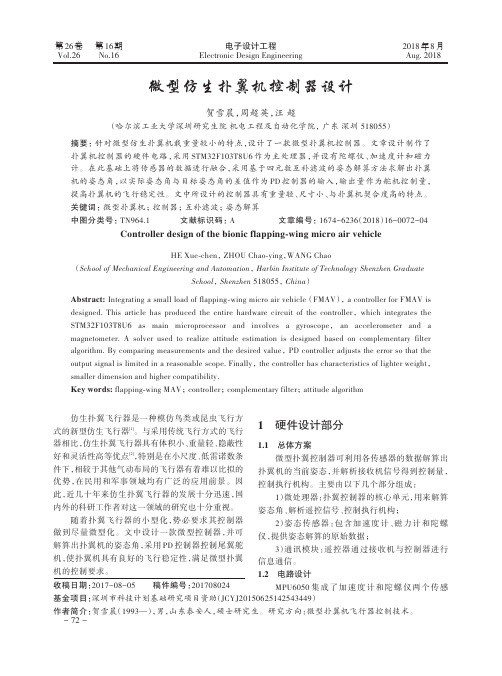
摘要:针对微型仿生扑翼机载重量较小的特点,设计了一款微型扑翼机控制器。文章设计制作了
图 3 为文中所设计的控制器:
图 2 姿态传感器电路图
图 3 控制器
2 软件设计部分
在上述已完成的硬件基础上进行软件设计,软件 的主要功能为:将接收到的遥控数据解析为电机控制 量和目标姿态角,其中电机控制量直接转换成对应占空 比的 PWM 信号输出给电机驱动模块,读取各传感器 的数据并进行姿态解算,得到飞行器当前的姿态数据,将 实际姿态角与目标姿态角的差值输入给 PD控制器,最终 得到调节后的控制量来控制尾翼舵机。框图如图 4 所示。
扑翼机控制器的硬件电路,采用 STM32F1础上将传感器的数据进行融合,采用基于四元数互补滤波的姿态解算方法求解出扑翼
机的姿态角,以实际姿态角与目标姿态角的差值作为 PD 控制器的输入,输出量作为舵机控制量,
提高扑翼机的飞行稳定性。文中所设计的控制器具有重量轻、尺寸小、与扑翼机契合度高的特点。
贺雪晨,等 微型仿生扑翼机控制器设计
图 1 控制器框图
器 ,磁 力 计 则 选 用 HMC5883L,气 压 计 BMP180 作 为 拓 展 功 能 ,三 个 传 感 器 均 采 用 I2C 总 线 与 微 处 理 器 进行数据传送。
微处理器的 SCL 和 SDA 与 MPU6050 的 I2C 接口 相连,而 MPU6050 的 AUX_CL 和 AUX_DA 直接连接 磁力计 HMC5883L,此时可将 MPU6050 的 AUX 接口 设置成直连式,微处理器便可直接访问 HMC5883L, 两个传感器共同组成 9 轴传感器,BMP180 也可以通 过 I2C 总线直接与微处理器相连。姿态传感器电路 如图 2 所示。
青少年科技创新大赛——仿生扑翼北斗龙的设计与制作
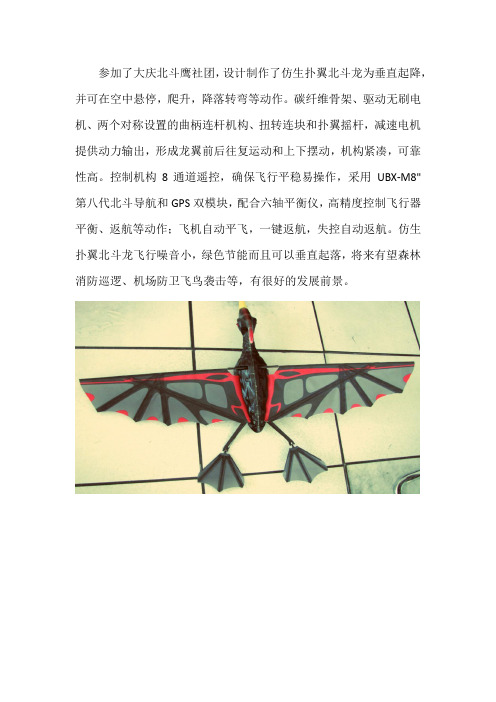
参加了大庆北斗鹰社团,设计制作了仿生扑翼北斗龙为垂直起降,并可在空中悬停,爬升,降落转弯等动作。
碳纤维骨架、驱动无刷电机、两个对称设置的曲柄连杆机构、扭转连块和扑翼摇杆,减速电机提供动力输出,形成龙翼前后往复运动和上下摆动,机构紧凑,可靠性高。
控制机构8通道遥控,确保飞行平稳易操作,采用UBX-M8"第八代北斗导航和GPS双模块,配合六轴平衡仪,高精度控制飞行器平衡、返航等动作;飞机自动平飞,一键返航,失控自动返航。
仿生扑翼北斗龙飞行噪音小,绿色节能而且可以垂直起落,将来有望森林消防巡逻、机场防卫飞鸟袭击等,有很好的发展前景。
微型扑翼飞行器扑翼运动规律与控制技术研究
摘要摘要微型扑翼飞行器扑翼运动规律与控制技术研究微型扑翼飞行器是一种仿鸟类的飞行器,其相比于固定翼飞行器和旋翼飞行器具有独特的优点,并且在军用和民用领域都具有非常广阔的应用前景,因此微型扑翼飞行器已经成为国际各大机构的研究热点之一。
本文主要对微型扑翼飞行器扑翼的运动模型和控制系统进行了研究,主要研究内容如下:首先,参考固定翼飞机的坐标系理论,定义了微型扑翼飞行器飞行时的坐标系统,建立了飞行时的运动参数和坐标系之间的关系。
并根据欧拉旋转定理,推导出了惯性、机体和机翼坐标系之间的变换矩阵。
其次,研究了微型扑翼飞行器扑翼的运动形式,设计出了刚性和柔性两种扑翼模型,并对这两种扑翼模型的气动力进行了分析和计算,并分析了迎角、扑动倾角、转动时间比等参数对扑翼的气动力的影响。
比较了这两个模型的特点,结果表明刚性扑翼模型具有平飞和驻飞两种飞行方式,两种飞行方式的结合可以极大的提高飞行器的机动性,而柔性扑翼模型由于自身的柔性变形能极大的提高飞行器的气动性能。
对两种扑翼模型在惯性坐标系下的气动力和气动力矩进行了分析,确定了影响飞行器位置和姿态的参数,并推导出了微型扑翼飞行器运动的总微分方程。
最后,根据推导出的微型扑翼飞行器总微分方程,提出了分层控制的方法,将微型扑翼飞行器的控制系统分为三个相对独立的控制层:轨迹规划控制层、位置控制层和姿态控制层,重点研究了位置控制层和姿态控制层控制系统的设计。
确定了以一个周期内的平均气动力和气动力矩代替瞬时气动力和气动力矩的控制方法,针对两种扑翼模型,提出了与之相适应的控制方法,并探讨了神经网络控制和切换控制在驻飞飞行姿态控制中的应用,最后采用MATLAB工具对控制系统进行了仿真分析。
关键词:微型扑翼飞行器,气动特性,运动方程,位置控制,神经网络控制,姿态控制AbstractAbstractThe Flapping Wing Motion Law and Control Technology Research of theMicro Flapping Wing Flight VehicleMicro flapping wing flight vehicle is a kind of imitation bird flying machines,because it is compared with the fixed wing aircraft and rotor wing aircraft has unique advantage,and in the field of military and civilian has very broad application prospects,so the study of the micro flapping wing flight vehicle become to one of the highlights in agro-scientific research in the international institutions.This paper aim at the motion law of flapping wing and the design of control system,The main research content is as follows:First of all,according to the fixed wing aircraft coordinate system theory,the coordinate system of the micro flapping wing flight vehicle was defined,and the relation between movement parameters of the micro flapping wing flight vehicle and the coordinate system has been defined.And according to the euler rotation theory,derived the transformation matrix of these three coordinate.Secondly,studied the motion form of the micro flapping wing flight vehicle,designed the rigid and flexible flapping wing model,and the aerodynamic force is analyzed and calculated for two flapping wing models.Then analyzed the influence of the flapping angle and the rotation time on the aerodynamic characteristics of flapping wing.The results show the rigid wings has two flight modes,the horizontal flight and hovering flight,which may enhanced flight mobility if they work together,and flexible flapping wing structure can greatly enhance the aerodynamic characteristics of flapping wing because of the flapping wing flexible deformation.The aerodynamic force and moment in inertia coordinate system of two kinds of flapping wing model were analyzed,and the parameters which effect the position and the posture of the micro flapping wing flight vehicle has been determined,and deduced the total differential equation of the micro flapping wing flight vehicle movement.Finally,according to the micro flapping wing flight vehicle total differential equation,吉林大学硕士学位论文It decomposes the global control system into three independent control systems,trajectory planner control system,position control system and posture control system.For the position and the posture control system,a method of average aerodynamic forces and moment is designed.According to two kinds of flapping wing model,put forward the corresponding control method,for the two models of the micro flapping wing flight vehicle position and posture control strategies were studied.The application of artificial neural network and the switching control for micro flying vehicle in hovering flight is discussed.Finally,the control systems are simulated and analyzed by the MATLAB.Key words:micro flapping wing flight vehicle,aerodynamic characteristics,movement rule,position control,neural network control,posture control目录目录第1章绪论 (1)1.1课题的研究背景和意义 (1)1.1.1扑翼飞行器的研究背景 (1)1.1.2研究意义 (2)1.2国内外研究现状 (2)1.2.1国外研究现状 (3)1.2.2国内研究现状 (5)1.3论文的主要工作 (6)第2章扑翼飞行机理和飞行坐标系统 (7)2.1昆虫的飞行机理研究 (7)2.2坐标系定义 (10)2.2.1结构模型 (10)2.2.2坐标系定义 (11)2.3坐标系之间的变换矩阵 (12)2.3.1惯性坐标系和机体坐标系之间的变换矩阵 (12)2.3.2机体坐标系与机翼坐标系的关系 (13)2.4本章小节 (14)第3章扑翼模型及气动力分析 (15)3.1引言 (15)3.2刚性扑翼模型平飞气动力分析 (15)吉林大学硕士学位论文3.2.1刚性扑翼模型平飞飞行方式 (15)3.2.2气动力计算 (16)3.2.3仿真与分析 (18)3.3刚性扑翼模型驻飞气动力分析 (19)3.3.1刚性扑翼模型驻飞飞行方式 (19)3.3.2气动力计算 (21)3.3.3仿真与分析 (22)3.4柔性扑翼模型的气动力分析 (23)3.4.1柔性翼的扑动方式 (23)3.4.2气动力计算 (24)3.4.3仿真与分析 (24)3.5本章小结 (25)第4章微型扑翼飞行器的运动方程 (27)4.1参数关系的建立 (27)4.2微型扑翼飞行器三维空间运动方程的建立 (28)4.2.1平动时的动力学方程 (28)4.2.2转动时的动力学方程 (28)4.3作用在微型扑翼飞行器机体上的力和力矩 (30)4.3.1刚性扑翼模型平飞飞行的力和力矩 (30)4.3.2刚性扑翼模型驻飞飞行的力和力矩 (31)4.3.3柔性扑翼模型的力和力矩 (33)目录4.4本章小结 (35)第5章控制系统设计 (37)5.1引言 (37)5.2刚性扑翼模型平飞飞行控制系统设计 (38)5.2.1刚性扑翼模型平飞位置控制 (38)5.2.2刚性扑翼平飞飞行的姿态控制 (42)5.3刚性扑翼模型驻飞飞行控制系统设计 (44)5.3.1基于切换控制的姿态控制方案 (44)5.3.1基于神经网络的姿态控制方案 (47)5.4柔性扑翼模型飞行控制系统设计 (49)5.4.1柔性扑翼模型位置控制系统 (49)5.4.2柔性扑翼模型姿态控制系统 (52)5.5本章小结 (54)第6章总结与展望 (55)6.1全文总结 (55)6.2展望 (56)参考文献 (57)作者简介及科研成果 (63)致谢 (65)第1章绪论第1章绪论1.1课题的研究背景和意义微型扑翼飞行器是一种仿生类飞行器,同固定翼飞行器相比,固定翼飞行器要产生很大的升力需要很大的表面积和很高的飞行速度,而很高的飞行速度需要发动机提供很大的牵引力,所以固定翼飞行器无法完成低速条件下的稳定飞行,扑翼飞行器所维持飞行所需要的升力和推力均由扑翼的扑动产生,不需要大功率发动机的牵引,因此能够完成低速条件下的飞行。
微型扑翼飞行器扑翼机构优化设计

杆机构的运动方程为院
蓸 蔀 蓸 蔀 椎 = arctan
a b
- arccos
c
2
2
姨a + b
渊2冤
其中
a = - 2L4L6sin ( 鬃 - 琢 )
渊3冤
b = 2A 2L6 - 2L2L6cos ( 鬃 - 琢 )
c
=
L
2 5
-
A
2 2
-
L
2 4
-
L
2 6
+
2A
2L
4cos
(
鬃
-
琢
)
渊4冤 渊5冤
段的运动学方程为院
22
蓸 蔀 蓸 蔀 姨 tan 鬃- 仔 = 鬃- 仔 = A 1 -L 1 cos兹- L 2 -L 1 sin兹 渊 1 冤
2
2
L3
图 1 优化设计后的扑翼机构的运动简图
其 中 袁兹 是 扑 翼 机 构 的 输 入 角 度 袁鬃 是 扑 翼 机 构 中
四 杆 机 构 的 输 入 角 度 遥第 二 阶 段 运 动 学 方 程 袁也 即 四
得 到 资 金 等 方 面 的 支 持 袁因 此 袁平 台 建 设 和 更 新 速 度 很
叶工 程 力 学 曳课 堂 学 习 过 程 枯 燥 乏 味 袁也 直 接 影 响 着
科技视界sciencetechnologyvisionsciencetechnologyvision科技视界1设计原理为了提高传动性能尧减少摩擦尧便于制造袁应尽量避免机构中出现高副遥在扑翼机构的设计中袁如果杆件的连接均采用转动副袁连接扑翼的杆件的运动难以达到无滞后袁同步对称扑动的要求袁如delfly砖扑翼机构袁右扑翼杆件的扑动相对于左扑翼杆件的扑动存在滞后遥解决扑翼机构不对称扑动的问题袁可以将曲柄机构替换为滑块机构袁将连接左右扑动杆件的转动副替换为移动副遥存在滑块机构及移动副袁并能够使杆件对称扑动的六杆七副一般化铰链遥再由存在滑块机构移动副的再生运动链逆推袁得到衍生机构的运动简图遥在以上所得的满足扑翼机构进本设计条件的几种机构中袁可根据设计者的需要袁进行分析比较袁采用最适合的机构再进行综合和优化设计遥为了保证机构结构的简单可靠袁我们这里采用滑块机构移动副的再生运动链袁进行进一步的优化设计遥由于机构拟采用微型直流电机驱动袁其特性为转速大袁力矩小袁因此扑翼机构的设计还要具有降低转速尧增大力矩的功能遥基于此类特性袁滑块机构移动副的再生运动链机构中增加齿轮减速机构遥为了能够在扑翼机构中预留出齿轮减速机构的位置袁滑块机构的行程会相应地缩小袁为了保证扑翼杆件扑动的角度袁在2尧6扑翼杆件上增加四杆机构袁同时四杆机构的设计也有利于提高输出力矩遥然后袁将2尧6扑翼杆件上的移动副前移袁并在3尧5杆件的复合铰链位置处形成复合运动副遥2机构的优化设计优化设计后的单边扑翼运动简图如图1所示遥其杆件的长度和相应的位置关系在图中用相应的代号表示遥运动简图中袁可以把设计的机构看作由滑块机构和四杆机构通过移动副连接组成遥在对此机构进行运动学研究时袁可以将其分为两个阶段遥第一阶段的运动学方程为院tan鬃仔2蓸蔀鬃仔2蓸蔀a1l1cos兹l22l21sin兹姨l3渊1冤图1优化设计后的扑翼机构的运动简图其中袁兹是扑翼机构的输入角度袁鬃是扑翼机构中四杆机构的输入角度遥第二阶段运动学方程袁也即四杆机构的运动方程为院椎arctanab蓸蔀arccosca2b2姨蓸蔀渊2冤其中a2l4l6sin鬃琢渊3冤b2a2l62l2l6cos鬃琢渊4冤cl25a22l24l262a2l4cos鬃琢渊5冤为了使扑翼机构得到120毅的扑翼角度袁以及使上下扑动呈对称的形态袁基于渊1冤至渊5冤袁可以优化得到最终的各杆件长度以及相应的位置参数袁其参数如表1所示遥表1扑翼机构各杆
《小型扑翼飞行器的结构设计及仿真分析》

《小型扑翼飞行器的结构设计及仿真分析》一、引言随着科技的不断发展,扑翼飞行器因其高效、灵活的飞行特点,在军事侦察、环境监测、生物仿生学等领域中受到了广泛的关注。
本文旨在探讨小型扑翼飞行器的结构设计及其仿真分析,为扑翼飞行器的设计与研发提供理论依据。
二、小型扑翼飞行器的结构设计(一)基本框架设计小型扑翼飞行器的结构主要由以下几个部分组成:框架、动力系统、驱动系统、飞行控制系统和扑翼机构。
其中,框架是整个飞行器的基础,负责支撑和固定其他部件。
(二)扑翼机构设计扑翼机构是扑翼飞行器的核心部分,其设计直接影响到飞行器的飞行性能。
扑翼机构主要包括翼片、连杆、驱动装置等。
翼片的设计要考虑到空气动力学特性,以提高飞行器的升力和稳定性。
连杆和驱动装置的设计要保证翼片的运动轨迹和速度,以实现高效的能量转换。
(三)动力系统与驱动系统设计动力系统通常采用电动或燃油发动机,为飞行器提供动力。
驱动系统则负责控制扑翼机构的运动,通常采用舵机或电机等。
在设计中,要考虑到动力系统的功率、重量、体积等因素,以及驱动系统的控制精度和可靠性。
(四)飞行控制系统设计飞行控制系统是扑翼飞行器的重要组成部分,负责控制飞行器的姿态和轨迹。
通常采用微处理器和传感器等设备实现控制。
在设计中,要考虑到控制系统的稳定性、响应速度和抗干扰能力等因素。
三、仿真分析(一)仿真模型的建立利用计算机仿真软件,建立小型扑翼飞行器的三维模型。
模型要尽可能地反映真实情况,包括各部件的尺寸、重量、材料等参数。
(二)仿真实验过程在仿真软件中,对模型进行动力学分析和运动学分析。
通过改变模型的参数,如翼片形状、连杆长度、驱动速度等,观察飞行器的飞行性能变化。
同时,还可以通过仿真实验分析飞行控制系统的控制效果和稳定性。
(三)仿真结果分析根据仿真实验的结果,分析各参数对飞行器性能的影响。
通过对比不同设计方案的仿真结果,选择最优的设计方案。
同时,还要对飞行控制系统的控制效果和稳定性进行分析,以提高飞行器的整体性能。
一种仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法
一种仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法仿生蝴蝶扑翼飞行器是一种通过模仿蝴蝶独特的飞行方式而设计的飞行器。
它能够在空中灵活操控,具有较好的机动性能和稳定性。
在本文中,将介绍一种制作仿生蝴蝶扑翼飞行器及其拉线式转向机构的方法。
首先,我们需要准备一些材料和工具。
材料包括轻质的材料如薄金属片或塑料片,弹性线或者细线,小型电机,螺旋桨等。
工具则包括剪刀,胶水,钳子,锉子等。
1. 制作翅膀:使用剪刀将薄金属片或塑料片剪成蝴蝶翅膀的形状,大小可自行决定。
确保两个翅膀相对称,并且具有足够的扑翼空间。
然后使用锉子修整翅膀的边缘,使其光滑,减少空气阻力。
最后使用胶水将两个翅膀连接在一起,并且确保翅膀能够自由地扑动。
2. 安装电机和螺旋桨:选择一个小型电机并安装在飞行器的中心位置上。
将螺旋桨固定在电机轴上,确保可以有效地产生推力。
3. 制作拉线式转向机构:在飞行器的尾部或机身两侧的翅膀上,通过胶水或螺丝固定一个小轴。
使用弹性线或者细线将此小轴连接到电机上。
当电机旋转时,它将通过拉线转动翅膀,实现方向的改变。
完成以上步骤后,我们就成功地制作了仿生蝴蝶扑翼飞行器及其拉线式转向机构。
在使用时,只需将电机连接到能源供应,并确保翅膀可以自由地扑动。
通过控制电机的转动速度和方向,我们可以实现飞行器的正常飞行以及转向。
总结:仿生蝴蝶扑翼飞行器及其拉线式转向机构的制作方法相对简单,只需准备适当的材料和工具,并按照上述步骤进行操作即可。
这种飞行器的设计灵感来自于蝴蝶的飞行方式,具有较好的机动性能和稳定性。
通过不断改进和调整,希望能够进一步完善这种仿生飞行器,并应用到更多实际应用场景中。
小型仿生扑翼飞行机器人动力学优化设计研究
小型仿生扑翼飞行机器人动力学优化设计研究摘要:随着科技的不断发展,仿生学在机器人领域中的应用逐渐得到了广泛关注。
本文研究了一种小型仿生扑翼飞行机器人的动力学优化设计方法。
首先,通过对鸟类飞行的观察和分析,建立了仿生扑翼飞行机器人的运动学模型。
然后,根据该模型,利用优化算法对机器人的关键参数进行调整,以实现更加稳定和高效的飞行动作。
最后,通过实验验证了所提出的设计方法的有效性。
关键词:仿生学;扑翼飞行;动力学优化;机器人1. 引言扑翼飞行机器人是一种能够模拟鸟类等动物扑翼飞行动作的机器人。
相比于固定翼飞行器,扑翼飞行机器人具有更好的机动性和适应性,可以在狭小的空间中进行飞行和悬停。
因此,研究小型仿生扑翼飞行机器人的动力学优化设计具有重要的理论和实际意义。
2. 方法2.1 仿生学原理仿生学是通过模仿自然界的生物系统,从中汲取灵感和设计原则,来解决工程和科学问题的一门学科。
在本研究中,我们以鸟类的扑翼飞行为基础,将其运动学特征应用于机器人的设计。
2.2 运动学模型建立根据鸟类扑翼飞行的运动规律,我们建立了小型仿生扑翼飞行机器人的运动学模型。
该模型包括机器人的位置、速度和加速度等关键参数,并考虑了机器人与环境之间的相互作用。
2.3 动力学优化设计为了实现机器人的稳定和高效飞行,我们利用优化算法对机器人的关键参数进行调整。
通过改变机器人的翼展、翼面积、翼型等参数,使得机器人在飞行过程中能够更好地适应不同的环境和任务需求。
3. 实验结果与讨论我们通过实验验证了所提出的动力学优化设计方法的有效性。
实验结果表明,通过优化设计的机器人在飞行过程中表现出更好的稳定性和机动性,能够更好地应对复杂的环境和任务需求。
4. 结论本研究通过对小型仿生扑翼飞行机器人的动力学优化设计,实现了机器人的稳定和高效飞行。
该研究为小型仿生扑翼飞行机器人的设计和应用提供了重要的理论基础和技术支持。
仿生扑翼飞行机器人自主飞行控制系统设计

控制策略验证:验证控 制策略在实际飞行过程 中的有效性,如姿态控 制、飞行路径规划等。
安全性能评估:评估机 器人在遇到突发情况时 的应急处理能力,如避 障、悬停、自动返航等 。
通过以上实验设置与环 境、飞行实验执行与数 据收集、实验结果分析 与评估的内容,可以对 仿生扑翼飞行机器人自 主飞行控制系统进行全 面、系统的验证,为后 续的优化和改进提供有 力支持。
感谢您的观看
驱动设计
驱动系统是实现扑翼飞行机器人自主飞行的关键部分。可以 选择电动、气动或液压等驱动方式,根据机器人设计和飞行 需求选择合适的驱动方式,同时需要设计相应的驱动接口和 传动装置。
传感器选择与集成
惯性测量单元(IMU)
高度计
IMU可以测量机器人的加速度、角速度和 姿态角等信息,是实现飞行稳定和自主导 航的重要传感器。
02
03
数据预处理
数据融合
对原始数据进行滤波、去噪、校 准等预处理操作,提取有效信息 。
将不同传感器的数据进行融合, 如通过卡尔曼滤波算法,提高数 据精度和可靠性。
人机交互与遥控接口
图形用户界面
设计直观易用的图形用户界 面,实时显示飞行机器人的 状态参数、飞行轨迹等信息 。
遥控指令解析
解析从遥控器接收到的指令 ,转换为飞行机器人可识别 的控制信号。
仿生扑翼飞行机器人 自主飞行控制系统设 计
汇报人: 日期:
contents
目录
• 引言 • 控制系统硬件设计 • 控制系统软件设计 • 自主飞行实验与验证 • 系统优化与未来工作
01
引言
仿生扑翼飞行机器人概述
仿生设计
仿生扑翼飞行机器人是模仿自然界中的鸟类或昆虫的飞行原理设计的机器人, 具有独特的扑翼机构,能够实现类似于生物的飞行动作。
微型扑翼飞行器的结构设计与制作技术研究

微型扑翼飞行器的结构设计与制作技术研究随着科技的不断进步,微型扑翼飞行器作为一种新型飞行器,受到了越来越多的关注。
微型扑翼飞行器是一种仿生飞行器,其设计灵感来自于昆虫的翅膀运动原理,通过模仿昆虫的翅膀运动方式实现飞行。
本文将重点研究微型扑翼飞行器的结构设计与制作技术。
微型扑翼飞行器的结构设计是实现其稳定飞行的关键。
首先,需要设计合适的翅膀形状和尺寸。
翅膀的形状应具有良好的气动特性,能够产生足够的升力和稳定的飞行。
其次,需要确定翅膀的材料和结构。
翅膀的材料应具有足够的轻量化和强度,常见的材料有碳纤维、玻璃纤维等。
翅膀的结构可以采用刚性或柔性结构,刚性结构适用于大型扑翼飞行器,而柔性结构适用于微型扑翼飞行器。
最后,需要设计合适的机身结构和连接方式,以实现翅膀的运动和控制。
微型扑翼飞行器的制作技术主要包括翅膀制作、机身制作和控制系统制作。
翅膀制作需要先制作翅膀的模具,然后根据模具制作翅膀,最后进行表面处理和装配。
机身制作可以采用3D打印技术或精密加工技术,根据设计要求制作机身的外形和内部结构。
控制系统制作包括电机、传感器和控制电路等的选择和安装,以及飞行器的姿态控制和稳定控制算法的开发。
微型扑翼飞行器的结构设计与制作技术研究的目的是实现微型扑翼飞行器的稳定飞行和控制。
通过合理的结构设计和制作技术,可以使微型扑翼飞行器具有较好的飞行性能和操控性。
此外,结构设计和制作技术的研究还可以为更大规模的扑翼飞行器的设计和制作提供参考。
总之,微型扑翼飞行器的结构设计与制作技术研究是一项复杂而重要的工作。
通过深入研究和不断探索,可以进一步提高微型扑翼飞行器的性能和应用领域,为未来的飞行器发展做出贡献。
《两段式仿生扑翼飞行器的结构设计及气动特性仿真》

《两段式仿生扑翼飞行器的结构设计及气动特性仿真》一、引言随着科技的不断进步,仿生学在航空领域的应用日益广泛。
其中,仿生扑翼飞行器因其高机动性、高仿生性及良好的环境适应性,成为了当前研究的热点。
本文将重点探讨两段式仿生扑翼飞行器的结构设计及气动特性仿真。
二、两段式仿生扑翼飞行器的结构设计1. 整体结构两段式仿生扑翼飞行器主要包含动力系统、控制系统和扑翼系统三个部分。
其中,扑翼系统采用两段式设计,分为上、下两个部分。
整体结构仿照鸟类飞行时的翅膀运动,具有较高的灵活性和适应性。
2. 扑翼系统设计扑翼系统是仿生扑翼飞行器的核心部分,其设计直接影响到飞行器的性能。
两段式扑翼系统由上翼段和下翼段组成,通过驱动机构实现上下扑动。
上翼段主要负责产生升力,下翼段则起到调节气流、增强飞行稳定性的作用。
3. 动力系统设计动力系统为仿生扑翼飞行器提供动力,主要包括电机、电池和传动机构等部分。
为了保证飞行器的轻量化和高效性,我们选用高性能的电机和电池,通过传动机构将动力传递到扑翼系统,实现飞行器的飞行。
4. 控制系统设计控制系统是仿生扑翼飞行器的大脑,负责飞行器的导航、控制和姿态调整。
我们采用先进的飞行控制算法和传感器技术,实现对飞行器的精确控制,使其能够按照预设的轨迹进行飞行。
三、气动特性仿真为了更好地了解两段式仿生扑翼飞行器的气动特性,我们采用计算流体动力学(CFD)技术进行仿真分析。
通过建立三维模型,模拟飞行器在不同速度、不同攻角下的气流分布和压力分布,从而得到飞行器的气动性能参数。
仿真结果表明,两段式仿生扑翼飞行器在扑动过程中,上下翼段的协同作用能够产生较大的升力,同时减小阻力。
此外,通过调整扑动频率和幅度,可以实现对升力和阻力的有效控制,从而提高飞行器的飞行性能。
四、结论本文对两段式仿生扑翼飞行器的结构设计及气动特性仿真进行了探讨。
通过采用两段式扑翼系统、高性能的动力系统和先进的控制系统设计,实现了仿生扑翼飞行器的轻量化、高效化和智能化。
《可折叠仿生扑翼飞行器的设计》
《可折叠仿生扑翼飞行器的设计》一、引言随着科技的飞速发展,飞行器已经从传统的固定翼和旋翼型态,逐渐拓展到仿生扑翼飞行器领域。
可折叠仿生扑翼飞行器作为一种新型的飞行器设计,其独特的仿生设计和折叠结构,不仅在军事侦察、环境监测等领域有广泛应用,同时也为人们的日常生活带来便利。
本文将详细阐述可折叠仿生扑翼飞行器的设计理念、结构特点以及其在实际应用中的优势。
二、设计理念可折叠仿生扑翼飞行器的设计理念主要基于仿生学和机械学原理。
设计过程中,我们参考了鸟类的飞行原理和翅膀结构,力求在机械结构、材料选择以及控制策略等方面实现突破。
同时,为了满足实际应用的需求,我们注重飞行器的便携性、稳定性和续航能力。
三、结构设计1. 翅膀设计:可折叠仿生扑翼飞行器的翅膀采用仿生结构设计,模仿鸟类的翅膀形态和运动方式。
翅膀由多段折叠式翼骨构成,每段翼骨之间通过关节连接,使得翅膀在飞行过程中能够灵活地展开和折叠。
这种设计不仅提高了飞行器的便携性,还使得其在空中飞行时能够更加灵活地调整姿态。
2. 机体设计:机体采用轻质材料制成,以降低整体重量。
同时,机体内部设有电池、电机、控制系统等关键部件,以保证飞行器的稳定性和续航能力。
3. 折叠机构:为了方便携带和存储,可折叠仿生扑翼飞行器采用了特殊的折叠机构。
这种机构使得飞行器在不需要使用时可快速折叠成较小的体积,便于携带和存储。
四、功能特点1. 仿生设计:可折叠仿生扑翼飞行器采用仿生设计,使得其在空中飞行时能够模仿鸟类的飞行方式和姿态,具有更高的灵活性和稳定性。
2. 折叠结构:独特的折叠结构设计使得飞行器在不需要使用时可快速折叠成较小的体积,方便携带和存储。
3. 高度集成:机体内部设有电池、电机、控制系统等关键部件,高度集成的设计使得飞行器具有更好的稳定性和续航能力。
4. 智能化控制:通过先进的控制系统和算法,实现对飞行器的精确控制和智能管理。
五、应用领域及优势可折叠仿生扑翼飞行器在军事侦察、环境监测、农业植保等领域具有广泛的应用前景。
舵机驱动仿生扑翼飞行机器人控制系统设计与实现
舵机驱动仿生扑翼飞行机器人控制系统设计与实现汇报人:日期:•引言•仿生扑翼飞行机器人概述•舵机驱动系统设计目录•控制系统设计与实现•系统测试与验证•结论与展望01引言随着科技的发展,仿生扑翼飞行机器人在军事侦察、环境监测、搜救等领域具有广泛的应用前景。
然而,如何实现仿生扑翼飞行机器人的稳定控制和高效扑动是其面临的重要挑战。
背景舵机驱动仿生扑翼飞行机器人控制系统的设计与实现,对于推动仿生扑翼飞行机器人的实际应用,提高其稳定性和效率具有重要意义。
意义研究背景与意义国内外研究现状国内在仿生扑翼飞行机器人领域的研究起步较晚,但近年来发展迅速。
主要研究方向包括扑翼飞行机器人的机构设计、材料选择、控制系统等。
国外研究现状国外在仿生扑翼飞行机器人领域的研究起步较早,技术相对成熟。
主要研究方向包括提高扑翼飞行机器人的效率、稳定性、智能化等。
其中,美国、欧洲和日本在该领域的研究处于领先地位。
02仿生扑翼飞行机器人概述控制电路用于接收指令并控制扑翼运动的电路系统。
动力系统为扑翼提供动力的装置,通常采用微型电机或微型涡轮发动机。
尾翼用于控制飞行方向和稳定性的部件,与机翼协同工作。
扑翼仿生扑翼飞行机器人的主要运动机构,通过快速扇动产生升力和推进力。
机翼用于产生升力的部件,通常采用轻质材料制成。
仿生扑翼飞行机器人的基本结构通过控制扑翼的扇动频率和角度,实现升力和推进力的调节。
通过尾翼的调节,实现飞行方向和稳定性的控制。
通过控制电路接收指令,实现各种动作和姿态的精确控制。
仿生扑翼飞行机器人的工作原理仿生扑翼飞行机器人的特点与优势结构简单、紧凑,易于实现小型化和微型化。
扑翼运动类似于鸟类或昆虫的翅膀,具有较高的空气动力学效率。
可通过改变扑翼的扇动频率和角度实现多种飞行模式,如悬停、前进、后退、侧移等。
具有较强的环境适应性,可在复杂环境中进行自主飞行或遥控飞行。
在侦查、探测、搜救等领域具有广泛的应用前景。
03舵机驱动系统设计舵机由外壳、电路板、电机、齿轮、曲轴、连杆等组成,其中电机和曲轴是核心部件。
基于仿生学的扑翼机设计与仿真

基于仿生学的扑翼机设计与仿真一、引言扑翼飞行器作为一种有机动能力的机器人,正在逐渐发展成为未来航空领域的重要组成部分。
而借鉴自然界的仿生学原理,是设计和优化扑翼飞行器的重要方法之一、本文旨在基于仿生学原理,设计并进行仿真分析扑翼机的运动特性和气动性能。
二、仿生学原理1.鸟类翅膀结构:鸟类翅膀的设计使得它们能够在空气中产生升力。
研究发现,鸟类翅膀呈现不对称的形状,上下表面的弯度不同。
这种不对称形状可以产生升力,并且还能减小气动阻力。
2.鸟类振翅模式:鸟类扑动翅膀的频率和振幅对飞行稳定性和效率至关重要。
实验观察发现,鸟类在起飞和飞行过程中,翅膀往往呈现上下振动和回旋运动的特点。
这种振翅模式可以减小气动阻力,并提高机体的机动能力。
在扑翼机的设计过程中,我采用了三维设计软件,模拟仿真扑翼机的运动特性和气动性能,并对设计参数进行优化。
1.扑翼机的翅膀结构2.扑翼机的振翅模式利用软件模拟了扑翼机在水平飞行和上升飞行过程中的振动频率和振幅。
通过改变振翅模式的参数,如频率和振幅,优化了扑翼机的飞行性能。
3.扑翼机的运动特性通过仿真分析,研究了扑翼机的俯仰、滚转和偏航运动特性。
通过改变机体的设计参数,如重心位置和机翼的位置,优化了扑翼机的运动性能和稳定性。
四、仿真结果与分析通过仿真分析,得出了扑翼机在不同飞行状态下的运动特性和气动性能。
结果表明,优化后的扑翼机具有较高的飞行效率和稳定性。
1.升力和阻力分析通过模拟扑翼机在不同速度下的飞行,得出了升力和阻力的变化曲线。
结果表明,在适当的速度范围内,扑翼机可以产生足够的升力,实现平稳的飞行。
2.振翅模式分析通过模拟扑翼机的振翅模式,得出了振翅频率和振幅对飞行稳定性和效率的影响。
结果表明,在一定的振翅频率和振幅范围内,扑翼机可以实现较高的机动能力和飞行效率。
3.运动特性分析通过模拟扑翼机的运动特性,得出了俯仰、滚转和偏航运动的变化曲线。
结果表明,优化后的扑翼机具有较高的运动稳定性和操控性能。
微型扑翼飞行器驱动系统工程设计方法
3 4
Ma c h i ne u r e
第 8期 2 0 1 3年 8月
微 型扑 翼 飞行 器驱 动 系统 工程 设 计 方 法
王利光 , 宋笔锋 , 付 鹏 , 安伟 刚 1 , 2
中图分类号 : T HI 6 ; V 2 7 6
文献标识码 : A
文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 8 — 0 0 3 4 — 0 4
En g i n e e r i n g De s i g n o f Dr i v i n g S y s t e m f o r F l a p p i n g - Wi n g Mi c r o Ai r Ve h i c l e s
2 . S h e n z h e n Ke y L a b o r a t o r y o f Mi c r o - b i o n i c UAV De s i g n , Gu a n g d o n g S h e n z h e n 5 1 8 0 5 7, Ch i n a )
原理, 对微型扑翼飞行器的总体参数进行 了初步设计 , 提 出了驱动 系统的设计 目标 。进行 了扑动翼风洞 实验, 以实际能达 到的飞行状态为标准对实验数据进行分析处理 , 获得 了扑动参数 的可行 范围和功耗需求。对微型无刷电机进行 了工作特
性测试, 得到 了电机转速、 转矩 、 输 出功率、 效率等的拟合关 系。 综合考虑扑动参数可行范围、 功耗 需求和电机特性等多个
W ANG L i - g u a n g ,S ONG B i - f e n g , F U P e n g ,AN We i - g a n g , 。 ( 1 . C o l l e g e o f A e r o n a u t i c s , N o r t h w e s t e r n P o l y t e c h n i c a l U n i v e r s i t y , S h a a n x i X i ’ a n 7 1 0 0 7 2 , C h i n a ;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要超小型仿生扑翼飞行器(FMAV)是一种模仿鸟类或昆虫飞行的新概念飞行器。
仿生学和空气动力学研究均表明,对于特征尺寸相当于鸟或者昆虫的微型飞行器来说,扑翼飞行要优于固定翼和旋翼飞行器。
本文以采用单曲柄双摇杆驱动机构的超小型仿生扑翼飞行器为研究对象,以提高其运动对称性为目的进行优化设计,为解决该类飞行器在飞行过程中发生向左或者向右倾斜、栽落的问题提出一种新的解决方案。
在对鸟类扑翼飞行生物学原理研究的基础上,从合力作用与分解的角度提出了一种气动力对超小型仿生扑翼飞行器作用的机理,解释了超小型仿生扑翼飞行器在试飞过程中倾斜栽落的力学原因。
同时根据该机理和条带理论计算了超小型仿生扑翼飞行器作一维拍动时上下方向受到的气动力,最后将计算结果与风洞实验所得到的升力曲线进行了比较,二者的结果比较接近。
用ADAMS建立超小型仿生扑翼飞行器虚拟样机,将气动力计算结果加载到虚拟样机上,仿真得到动力学状态下两翼扑动角速度曲线图;位置控制系统应用PID控制技术,借助MATLAB和ADAMS进行联合仿真,结果显示该控制系统设计合理,为超小型仿生扑翼飞行器的研制奠定了基础。
关键词:扑翼飞行器,仿生,PID控制,仿真The Design of Control System for Bionic Flapping-wingMicrominiature Air VehicleABSTRACTBionic Flapping-wing Microminiature Air Vehicle (FMAV) are new conceptual air vehicles that mimic the flying modes of birds and insects. The study of bionics and aerodynamics indicates that the MAV which the characteristic dimension almost equate to bird or insect, the flapping flight is precede to fixed and rotatory MAV.The object of study in the paper is FMAV that have driving mechanisms of single-crank and double-rocker, and launched the work surrounding the goal of enhancing the symmetry of the wings’ movement. a new solution of FMAV with driving mechanisms of single-crank and double-rocker often tilt toward the left or the right and fall in the course of flight was proposed in the paper. Based on the biological flight mechanism of birds, a new mechanism of FMAV affected by forces was proposed in view of composition of forces, and the reason of the phenomena in force was explained under the using the new mechanism. The force on wings in a full cycle was computed new mechanism when there was only flapping, and its curve is similar to the curve tunnel test.The whole simulation model of FMAV was established in ADAMS, then the precomputed force was load to the model, and the angular velocity of both wings in aerodynamic situation was gained, which paved the way to the dynamics optimization of the driving mechanisms. The position control system was designed by PID in the paper. The position control mode is research deeply by MATLAB and ADAMS. Results indicate that this positioncontrol system is efficient.Key words:FMAV,bionic,PID,simulation超小型仿生扑翼飞行器扑动控制设计厉敏0811051750 引言自古以来,人们就梦想着在天空自由翱翔。
在上亿年进化历史中,经过不断适应环境和优化选择,鸟类及昆虫的飞行技巧达到了几乎完美的程度,如昆虫利用其薄如蝉翼的翅膀高频振动,能够实现前飞、倒飞、侧飞及倒着降落等特技飞行,其载重能力是自身重量的两倍[7]。
鸟类与昆虫出色的飞行技能很早就引起了人类的注意,激发起人类的飞行梦想。
人类的飞行史,就是模仿飞行生物(鸟类及昆虫)进行仿生飞行的历史。
人们通过研究鸟类滑翔的原理,成功制成了滑翔机,初步实现了飞行的梦想。
1903年莱特兄弟在滑翔机基础上加装自制内燃机制成的“飞行者”1号试飞成功,标志着人类翱翔蓝天的梦想得以真正实现[1]。
在以后的一百年中航空科学迅猛发展,固定翼飞机从第一代已经发展到了第四代,旋翼飞机也得到长足的发展和应用[16]。
近几十年来,随着纳米科技以及微电子机械技术(MEMS)等出现及高速发展,飞行器的小型化、微型化越来越受到人们的重视。
进入21世纪后,飞行器的微型化技术已经成为衡量各国航空业水平的又一重要标志。
超小型仿生扑翼飞行器(Bionic Flapping-wing Microminiature AirVehicle, FMAV)是20世纪90年代发展起来的一种新型飞行器,由于具有特殊的用途(如侦察、电子干扰、搜救等)而倍受关注。
从现有的研究情况来看,超小型飞行器按其飞行方式可分为固定翼(Fixed Wings)、旋翼(Rotary Wings)和扑翼(Flapping Wings)三类。
超小型固定翼飞行器与旋翼超小型飞行器是固定翼飞机和旋翼飞机微型化的产物,其飞行原理分别与传统的固定翼飞机和直升机相同;超小型扑翼飞行器在构造上是模拟自然界鸟类或昆虫的拍翼飞行的机构,如同鸟类或昆虫利用拍翅同时产生升力与推力。
固定翼式和旋翼式超小型飞行器的研究迄今为止都达到了一定的水平,但是纵观自然界的飞行生物无一例外均采用扑翼的飞行方式来飞行,所以研究者普遍认为,扑翼是生物进化的最优飞行方式。
因此,有关扑翼飞行的机理及其在超小型飞行器上的应用又成为这一领域的一个研究热点。
随着人们对鸟类和昆虫生理结构和飞行机理研究的深入以及空气动力学和新型材料等的快速发展,如今的扑翼飞行器已越来越灵巧且逐渐小型化,离实用也越来越近。
本文主要针对这一类超小型扑翼飞行器进行研究。
1 研究背景与意义1.1 扑翼飞行器发展历程人类的飞行梦想最早是从模仿鸟类的形态开始的,早在中国汉朝时期就有人模拟鸟类进行扑翼飞行活动的记载。
西汉时期《鸿书》记载“公输般(鲁班)制木莺以窥宋城”;王莽时代曾有人用鸟羽做成翅膀试验过“飞人”,与中国相似,中世纪的欧洲也流传着不少有关飞行的神话和传说。
十五世纪意大利科学家和艺术家达·芬奇做了扑翼机的设计(见图1.1),但没有取得成功,但该设计在驱动机构方面显示出很高的工程技巧[2]。
图1.1 达·芬奇设计的扑翼机达·芬奇之后,仍然有很多人尝试以扑翼的方式飞上天空,但基本上都以失败而告终。
直到19世纪中期,科学家们才重新开始考虑扑翼机,并把它作为一种飞行器来研究,英国人哈尔格莱夫和德国人李林塔尔对扑翼机理论所作的研究及实践成为扑翼飞行器发展史上重要的里程碑。
这一时期最主要成果是制成最早的有记载能够飞行的扑翼飞行器:1874年由法国人Pénaud设计的以橡皮筋为动力的扑翼机模型, 如图1.2所示[3]。
图1.2 法国人Pénaud设计的扑翼机模型20世纪初,在经历一系列的失败后,科学家们被迫重新进行计算和设计,通过对试飞实践和所积累的理论资料的仔细分析,认识到:之前那些仅靠人体自身肌肉的力量来驱动的扑翼飞行器是无法实现持续飞行的。
由此至20世纪中后期,人类历经艰辛才发明了扑翼滑翔飞行器和动力扑翼飞行器[3]。
自20世纪中后期以来,鉴于仿生扑翼飞行器潜在的应用前景,其在短时间内就吸引了许多研究者的关注,对于较大尺寸及超小型扑翼的空气动力学研究也逐渐成为热点。
扑翼飞行器正在从大型向微型,从自由飞行向可控飞行发展。
1.2 超小型扑翼飞行器1.2.1 超小型扑翼飞行器的定义与特点超小型仿生扑翼飞行器(Flapping-Wing Micro Air Vehicle,简称FMAV)是一种模仿鸟类或昆虫飞行的新概念微型飞行器。
微型飞行器是上世纪90年代发展起来的一种新型飞行器。
1992年,美国国防高级研究计划局(DARPA)召开了关于未来军事技术的研讨会,第一次提出了微型飞行器MAV(Micro Air Vehicle)的概念,并提出其量级与昆虫及小鸟相似[4]。
它的特点是: 翼展和长度小于6英寸(152毫米),总重量约为10~100克,有效载荷约20克左右,续航时间20~60分钟,飞行速度约为30~60公里/小时,具有实时成像、导航及通信能力。
此外还要求其造价低廉、便于携带、操作简单、伪装性能好、更重要的是要能完成一定的任务[7]。
自MAV的概念出现后,便成为各国研究的热点。
从现有的研究情况看,微型飞行器按其飞行方式可分为固定翼布局、旋翼布局和仿生扑翼式布局3类。
固定翼式和旋翼式微型飞行器的研究迄今为止都达到了相当的水平,但是它们的高能耗、低机动性、低灵活性和稳定性差的缺点也日益凸显出来。
仿生学和空气动力学研究均表明,对于特征尺寸相当于鸟或者昆虫的微型飞行器来说,扑翼飞行器要优于固定翼和旋翼飞行器:(1)与固定翼和旋翼飞行器相比,扑翼飞行器的主要特点是将举升、悬停和推进功能集成于一个扑翼系统,依靠扑翼运动方式的改变可以快速有效地改变飞行器的姿态,具有较强的机动性与灵活性。