AOA和TA调整方法
一种基于LTE-MR劣化场景模式识别的自动优化方法

一种基于LTE-MR劣化场景模式识别的自动优化方法徐桦【摘要】Fine optimization to be LTE network must rely on the geographical distribution coverage and interference precise grasp. In this paper, the establishment of precise positioning interference matrix based on MR data, formed from the cover positioning, interference, users, space, time and other multi-dimensional analysis of network problems MR. Based on precise positioning of pattern recognition theory and MR data analysis, identification of the scene coverage and interference scenes automatically generate the appropriate optimization strategies to address these issues through an iterative algorithm.%要进行LTE网络的精细优化必须依赖于对覆盖和干扰的地理分布精确掌握。
本文基于MR数据建立精确定位干扰矩阵,形成从覆盖、干扰、用户、空间、时间等多维度定位网络问题的MR分析方法。
基于模式识别理论和MR数据的精确定位分析,智能识别出覆盖和干扰的场景,针对这些问题场景通过迭代算法自动生成相应的优化策略。
【期刊名称】《电信工程技术与标准化》【年(卷),期】2016(029)010【总页数】4页(P18-21)【关键词】MR定位;自动优化;模式识别;LTE-MR【作者】徐桦【作者单位】中国移动通信集团湖北有限公司,武汉 430023【正文语种】中文【中图分类】TN929.5在日常TD-LTE维护优化中,经常会遇到用户投诉感知差,但是受限于道路测试不够精细及楼宇内测试无法遍历,导致无法精准定位网络问题发生的具体位置,不便于精确优化方案的实施。
LTE网络MR和信令数据的联合分析方法_冯传跃

经度=服务小区经度+TA*Sin(AOA) (公式 2.7) 纬度=服务小区维度+TA*Cos(AOA) (公式 2.8) 2.1.4 基于小区标识的定位技术 在网络中,eNB/MME 会在移动台的位置更新、呼叫处理等过程中传送用户所在基站扇区 的小区 ID 信息,可以利用小区 ID 实现定位。这种方法不需要网络设备硬件升级,也不增加 网络实体,但定位精度不高,定位的范围与小区的覆盖范围相同。 2.1.5 利用 APP 经纬度信息定位 除了上述 4 种定位,正在研究中、基于用户业务面数据的定位方法。 在很多 App 应用中,都会上传终端的经纬度信息。经纬度信息是 http 层的内容,其指 标比较少。 (大约 0.1-1%) ,因此需要大量数据积累,才能有好效果。 由于此算法需要尽可能多的指纹库信息, 完整的指纹库建立是一个比较困难的过程。 而 利用 App 和 MR 结合生成的指纹库,可显著提升效率,提高系统的定位精度。 2.2 业界其它定位方法说明 除了上述方法,业界还有很多其它的定位算法: 2.2.1 GPS one 定位技术 目前比较实用的 GPS 定位技术是网络辅助的 GPS 定位。 网络将 GPS 卫星信息传送给移动 台, 移动台利用这些信息可以快速的搜索到有效的 GPS 卫星, 计算移动台位置的工作可以由 网络实体(如 PDE)或移动台完成。 网络辅助的 GPS 定位技术,定位精度比较高。实现这种定位技术,需要移动台内置 GPS 天线和 GPS 芯片等模块,并且需要支持 IS801 协议。网络侧需要增加 PDE 和 MPC。 2.2.2 3D 定位 3D 定位,即把定位结果通过 3D 地图进行形象化的展现。利用仿真中的射线追踪等精确 仿真算法,得到场强分布,再将 MR 中的场强信息与之进行匹配。得到覆盖点位置,定位到 3D 地图上。 上述定位方法的特点对比如下表:
TD—LTE R9定位技术研究

TD—LTE R9定位技术研究作者:徐莹莹延凤平来源:《移动通信》2012年第19期【摘要】文章对TD-LTE R9标准中三种定位技术(基于OTDoA、E-CID和A-GNSS的定位)的改进点进行了分析,结合Wi-Fi定位提出了物联网环境下的混合定位技术,并给出了混合定位的技术方案与定位流程。
【关键词】TD-LTE R9 混合定位 Wi-FiTD-LTE R9规范中,定义了三种定位方式:(1)基于OTDoA的定位;(2)基于E-CID 的定位;(3)基于A-GNSS的定位。
运营商可根据小区半径、自适应天线技术、路损和定时估计精度等实际情况,来决定采用其中一种或几种定位方式。
下面分别对这三种方式进行分析。
1 基于OTDoA的定位OTDoA(Observed Time Difference of Arrival)定位的基本思想是:UE根据eNodeB的下行参考信号,测量不同eNodeB的信号到达UE的时间差。
根据UE测量结果,并结合eNodeB 的坐标,采用合适的位置估算方法。
一般位置估算方法至少需要考虑3个eNodeB定位的情况,见图1。
UE测量的eNodeB的数据越多,测量精度越高,定位性能的改善也越明显。
1.1 引入新的定位参考信号在R9中针对OTDoA定位需求,专门引入了一种新的参考信号——Positioning Reference Signal(PRS)[1],并在一个所谓的定位子帧(Positioning subframe)中占据中央NPRSRB个PRB。
PRS可按较高功率在一个固定的天线端口(Port6)发射,实现较大范围覆盖。
UE基于每个小区的PRS,来测量该小区信号到达该UE的时刻。
R9规定正常子帧和MBSFN子帧都可用作定位子帧,而TDD制式下DwPTS不包含PRS。
NPRSRB由高层指示,取值范围为{6, 15, 25, 50, 75, 100}RBs[2]。
另外,在包含PRS的PRB内,若PDSCH物理资源映射时,按目前参考文献[1]规范定义,会覆盖掉PRS。
AOA和TADV计算方法

1.1 测量项基本概念1.1.1eNB到达角a)MR.LteScAOAb)反映UE相对服务小区的参考方位角,参考方向应为正北,逆时针方向。
是反映UE与服务基站位置关系的主要指标。
本测量数据表示接收的TD-LTE服务小区天线到达角的原始测量值(即Uu口上报的测量报告中的测量值),其单位符合角度测量量纲。
c)UEd)TS 36.214 V10.1.0,5.2.7节;TS36.133V10.4.0,10.2.1节。
e)取值范围如表1所示,其中第1列表示OMC-R北向接口实际上报的样本值,取值类型为整型。
表1 取值范围1.1.2时间提前量a)MR.LteScTadvb)反映UE到服务基站的信号传播时间,是反映UE与服务基站距离的主要指标。
本测量数据表示TD-LTE服务小区得到的时间提前量的原始测量值,其单位符合时间测量量纲。
c)UEd)TS 36.321 V9.6.0,6.1.3.5和6.2.3节;TS36.213V10.10.0,4.2.3节。
e)取值范围如表2所示,其中第1列表示OMC-R北向接口实际上报的样本值,取值类型为整型。
表2 取值范围利用MR数据来计算距离的方法:1Ts =1/(15000*2048)S,对应的距离等于:(3*10^8*1/(15000*2048))/2=4.89m。
1TADV=16Ts = 16*4.89m=78.12m通过MR采集服务器获取北向MRO文件,观察MRO文件中AOA和TA每采样时刻的数值。
同时根据路测设备记录的UE实际位置和目标基站实际位置,计算该时刻AOA和TA的理论值,将二者进行对比分析,已验证测量报告数据中AOA和TA 的准确性。
输入参数:UE实际位置信息(x,y)基站实际位置(x,y)约定:将地球近似为一个球体,半径为Radius,设O点为球心,Ue和eNB分别为球面上两点B和A,设夹角AOB为theta。
设经度为lamda,纬度为phi。
一、Tadv理论值计算思路:目标:计算A、B两点间的弧长。
TA安装调试指南

TA安装调试指南TA 安装调试指南目录一、 TA产品安装说明 (3)1.1. 静态平衡阀(型号:STAD/STAF) (3)1.2. 压差控制器(STAP) (4)1.3. 动态流量平衡阀(自动平衡阀)(YR/WS) (7)二、调试前准备工作 (8)2.1. 水力平衡调试前的准备工作及注意事项 (8)2.2. 水力平衡调试前系统满足的条件 (10)2.3. 水力平衡调试前相关表格的填写 (10)附表1 工程平衡阀调试前的系统调查及准备工作 (11)三、水力平衡调试步骤 (12)3.1. 平衡方法的理论及方法简介 (12)3.1.1.基本原理 (12)3.1.2.常用平衡方法简介 (12)3.2. 静态平衡阀的调试步骤 (15)3.2.1.调试要求 (15)3.3. 压差控制器组的调试步骤: (17)3.4. 动态流量平衡阀的调试步骤 (18)四、现场调试后编制调试报告及建议 (19)4.1. 水力平衡调试报告的填写 (19)4.2. 根据水力平衡调试报告建议和采集反馈 (23)附录一 TA产品施工现场保护注意事项 (24)一、 1.1. TA 产品安装说明静态平衡阀(型号:STAD/STAF )1. 到货后应妥善保管、避免雨淋、存放于干燥处;2. 安装前应检查阀门和密封处是否清洁并确认未遭损伤;3. 安装前应尽量确保管路系统清洁干净;4. 安装前法兰必须准确对中,螺杆和配合垫圈必须经过润滑,交叉上紧螺栓,检查平面密封是否符合法兰要求;5. 静态平衡阀与弯头(2d、5d)或者水泵(10d)相连(d 为管径),请保持一定的安装距离,请参考下图:图一6. 阀门的安装,a) 单独使用静态阀时,最好安装在回水管上(铜阀门无箭头,最好水流方向与手轮倾斜方向一致;铸铁阀阀体有水流方向指示);如下图图二b) 当静态平衡阀与压差控制器配套使用时,将静态阀安装在供水管上,(铜阀门无箭头,水流方向须与手轮倾斜方向相反;铸铁阀阀体有水流方向指示);如下图图三(三.1) (三.2)7.在管道上可垂直安装亦可水平安装;8.在对静态平衡阀作保温时建议保留测量孔可以正常使用,特别是不能随意打开测量孔,以免细渣进入,影响调试和使用;9.安装时要求阀门上的手轮距四周要尽量达到200mm以上,特别是在吊顶内的阀门,要求按阀门的手轮正面便于看见位置安装,以便对其进行调试。
AOA和TA调整方法

说明:目前仅中兴机型AOA数据验证准确度比较高,可作为调整依据;其他机型AOA方位角仅作为参考(华为机型AOA存在跳变,需在下个版本中解决,分析结果暂不作为依据),需要结合现场勘查情况制定调整方案。
2
2
TA(时间提前量)提取方法:共享模版-LTE Nhomakorabea间提前量查询
2.2
1)现场核实LTE小区下倾角是否和基站数据库下倾角一致;
2)准确掌握以下工参信息,并导入工具进行计算。
如海拔差可根据google地图的海拔计算,海拔差=覆盖目标海拔-基站海拔(不含天线挂高)。
天线挂高
海拔差
95%采样点TA值
TA覆盖距离
垂直半功率角
机械下倾角
atan
∏
电倾角
3)计算实际下倾角和TA计算出下倾角的差值;
2处理步骤aoa方位角统计基站数据库方位角和aoa方位角差值是否30现场核实实际方位角和aoa方位角差值是否30按照aoa方位角进行调整是是更新基站数据库方位角字段否共站其它lte小区联动调整调整后方位角和共站其它小区夹角是否60度结束是否1现场核实lte小区天线方位角是否和基站数据库方位角一致
基于AOA和TA的方位角下倾角调整方法
使用基站数据库小区方位角与MR-eNB天线到达角数据评估的方位角进行对比,如偏差绝对值介于(30°,330°)则判断该小区的方位角存在不合理。
以下为MR天线到达角计算宏:
2)AOA提取
AOA提取模板
3)AOA统计说明
AOA报表中的分别对应宏中的0,5,10,150,.......,将数据导入宏中。
计算出“结果”第一列分裂出后,用360度减去该值可得出小区AOA方位角,和基站数据库方位角对比求出角度差。
物联网定位技术综述

物联网定位技术综述作者:林吉来源:《中国新技术新产品》2017年第02期摘要:无线通信技术的发展推动了物联网时代的到来,越来越多的应用都需要自动定位服务。
“物”节点位置是反映网络状态的重要信息,在物联网发展和应用中占据重要地位。
本文对当今三类物联网定位技术进行综述,介绍它们各自的原理和应用场景,对这些技术在精度、范围和移动性等方面进行比较。
关键词:定位技术;GPS;性能中图分类号:P228 文献标识码:A物联网通过实现人对物的管理、物对物的自主管理,达到物的信息网络化,实现信息资源共享和交换。
物联网定位就是采用某种计算技术,测量在选定的坐标系中人、设备、以及事件发生的位置,是物联网科学发展和应用的主要课题之一。
物联网中常用的定位技术主要有GPS、移动蜂窝测量技术、WLAN、短距离无线测量(Zigbee、RFID)、WSN等。
本文主要介绍了前3种技术的基本原理、定位特点和应用场合,并对以上几种技术性能进行对比。
1. 定位技术分类1.1 GPS定位。
GPS是物联网延伸到移动物体,采集移动物体信息的感知技术。
其定位的基本原理是GPS接收机将高速运动的卫星瞬间位置作为已知的起算数据,并测量出到卫星的距离,计算出接收机运动方向、运动速度和时间信息,当接收到大于等于4颗GPS卫星信号时,便可列出4个定位方程,联立可求出观测点位置。
GPS可实现全天候、高精度、连续迅速的三维定位(纬度、经度和高度)和测速,这在车辆导航管理,测绘与跟踪服务中扮演着重要角色。
图1为GPS车载定位系统示意图:天线捕获并放大GPS 信号,GPS接收机记录GPS 信号并对信号进行解调和滤波处理,还原出GPS 卫星发送的导航电文,或采用测后处理的方式,获得定位、测速、定时等数据。
导航计算机承担整个系统的管理、控制和实时数据处理。
外设包括键盘和视屏监控器等,是进行人机交流部件。
1.2无线蜂窝定位。
受移动互联网发展的推动,基于CDMA技术的3G及4G移动通信能够实现民用级的导航定位,成为人们关注的焦点。
NB-IOT系统概要介绍

a)需根据具体的业务
类型构建贴近现实的 功耗模型; b)终端电池自放电情 况测试; c)在不同的环境条件 及业务模型下终端整 机耗电测试; d)为降低终端耗电所 采用的终端休眠机制 测试等
a)在确定资源配置下支持
同时接入的最大用户数 目; b)基于给定上行业务模型 的上行连接数目/容量极限 测试; c)基于给定下行业务模型的 下行连接数目/容量极限测 试; d)基于给定上下行混合业 务模型的连接数目/容量极 限测试;
Legend
15K Hz OFDM symbol with 10Ts CP
15K Hz OFDM symbol with 9Ts CP
NB-IoT物理层上行
• NB-IoT的上行物理信道
LTE NB-IoT PRACH NPRACH PUSCH NPUSCH Format 1 PUCCH NPUSCH Format 2
NB-IoT
火灾自动报警 特点:终端位臵固定,上行延时敏 感的小数据包业务 类似场景:燃气泄漏报警、电梯故 障报警、老人急救
2
NB-IoT 概述
NB-IOT关键需求及性能指标
大
大连接,接入能力 增强
低
低功耗、低成本设 计
强
覆盖能力增强
支持海量的低吞吐量 终端
每小区支持用户 5万+
• 5万用户为小区内部署的终端 数,并发用户数较少
• 基站通过SIB2广播配臵最多三组重复等级以及每组重复等级的RSRP门 限,: • 终端根据RSRP门限选择合适的重复等级进行随机接入 • R13 NB-IoT只支持竞争的随机接入,过程与LTE相同
NB-IoT NPUSCH format 1
• 用于传输上行业务数据的物理信道 • 仅支持RV0和RV2两种冗余版本 基站调度子载波间隔不同 的UE在一个上行子帧进行 传输时会产生互干扰
TD-LTE网络基于AoA+TA功能的接入控制应用

TD-LTE 网络基于AoA+TA 功能的接入控制应用秦嗣仲(中国移动通信集团辽宁有限公司丹东分公司,丹东 118000)摘 要 本文论述了在TD-LTE网络中遇见的新问题,即边境优化问题。
中国移动TD-LTE网络建设与朝鲜隔江而建,参考丹东边境GSM网络的方法,结合TD-LTE网络自身特点,TD-LTE网络采用宏站小区覆盖朝鲜新义州沿江区域,令宏站小区采用基于位置的接纳控制算法(如AoA+TA方法等),通过UE距离站点的远近限制朝鲜用户接入TD-LTE网络进行业务。
关键词 TD-LTE网络;边境优化;基于AoA+TA的接入控制中图分类号 TN929.5 文献标识码 A 文章编号 1008-5599(2015)02-0020-05收稿日期:2015-01-16丹东市与朝鲜的新义州市隔鸭绿江相望。
鸭绿江的江面大约几百米宽,由于无线电磁信号在水面上的传播距离相比其它场景较远,因此丹东市的TD-LTE 信号在新义州市部分区域有信号覆盖。
目前,丹东GSM/TD-SCDMA 经过多年长时间的处理,通过GSM/TD-SCDMA 的TA 技术(距离限制),利用丹东江边较高的GSM/TD-SCDMA 网络站址覆盖朝鲜区域,让用户接入这些站点后无法承载网络业务,应用此方法,朝鲜跨境用户中,98%以上无法接入沿江算法小区。
由于目前中国移动TD-LTE 网络开始商用,根据朝鲜方面要求,中国越过朝鲜边境在新义州江边覆盖的TD-LTE 信号需要满足如下要求:无法进行短消息业务和无法进行PS 业务。
涉及边境优化及外交层面的问题,比较棘手,朝鲜沿江区域不可以使用中国境内TD-LTE 网络的研究课题被提上日程。
本文重点介绍丹东边境区域TD-LTE 接入控制无线算法AoA(Angleof Arrival)+TA 及其验证效果等。
1 AoA+TA 算法研究为解决丹东鸭绿江区域的越境覆盖问题,可采用在TD-LTE 网络中基于AoA+TA(基于时间提前量和来波方向进行定位的方法)的位置测量的业务接入控制算法,来达到边境优化的目的。
VSAT的原理与应用
VSAT原理以及在各方面的应用0915222020 余畅09通信B 班摘要:VSAT 是指直接设在使用地点并可直接联接用户设备的小型卫星通信地球站,本文介绍了关于VSAT系统的组成,VSAT网的分类,VSAT通信网络的特点以及具体参数。
并结合自身认识与详细考察,总结了VSAT卫星通信网络在交通安全,CDMA通信,远程教育等多面的应用,并展望了VSAT未来的发展。
关键词:VSAT,通信网络,CDMA,卫星链路;地面链路;应急通信远程教育; 网络系统1.VSAT技术介绍1.1系统概述VSAT 系统由室外单元和室内单元组成。
室外单元即射频设备,包括小口径天线、上下变频器和各种放大器;室内单元即中频及基带设备,包括调制解调器、编译码器等,其具体组成因业务类型不同而略有不同。
目前,国内VSAT 通信业务向社会开放经营; VSAT 直译为“甚小口径终端”指天线直径小于2.4m,G/T 值低于19.7DB/K,是由大量地面站构成的卫星传输系统。
VSAT 地球站之间通过通信卫星上转发器的中转直接通信,传输延迟一般小于0. 3 s。
VSAT在卫星覆盖的1 /3 地球表面区域内,任何两个或多个卫星地球站之间,不管距离远近,通信效果都是相同的,不易受地理环境、天气条件的限制,不需要其它地面设施。
移动地球站机动灵活,普通天线系统对星时间小于5 min。
通过终端设备的转接,一条卫星链路可以同时传输多路语音、数据和图像信息。
同时VSAT采用Ku 波段时,频率很高,不易受到其它电磁波的干扰。
1.2VSAT 通信的特点相对于传统通信网络,VSAT通信具有着明显的优势(1)VSAT 是真正的全球通信,覆盖面广、容量巨大、通信不受地理环境和气候条件的限制;(2)地面站设备简单,体积小,重量轻,造价低,安装与操作简单。
VSAT 小站可直接安装在用户所在的楼顶、轮船或汽车上等,可直接与用户终端接口;组网灵活方便。
由于网络部件模块化,便于调整网络结构,易于适应用户业务量的变化;(3)通信质量好,可靠性高。
AOA和TA调整方法

AOA和TA调整方法AOA(活动和对象)和TA(时间调整)是项目管理中常用的两种调整方法。
AOA是一种网络计划图方法,TA是一种时间调整方法。
下面将分别介绍这两种方法。
一、AOA(活动和对象)方法AOA方法是一种活动分析法,通过构建活动分析图来识别和管理项目中的活动和任务。
AOA方法将项目中的活动表示为节点,并使用箭头表示活动之间的依赖关系。
通过构建活动网络图,可以清晰地显示出各个活动之间的关系,帮助项目管理者更好地进行任务分配和时间安排。
AOA方法的使用步骤如下:1.确定项目的关键活动和其它活动:首先需要确定项目中的关键活动,即对整个项目进度具有决定性影响的活动。
然后确定其它的活动,即非关键活动。
2.确定活动的先后关系:根据项目的逻辑关系,确定各个活动之间的先后顺序。
例如,一些活动必须在其它活动完成之后才能开始,这些活动就是后续活动。
而一些活动必须在其它活动完成之前才能开始,这些活动就是前置活动。
通过确定活动的先后关系,可以构建出活动网络图。
3.绘制活动网络图:根据确定的活动先后关系,绘制出活动网络图。
在活动网络图中,用箭头表示不同活动之间的依赖关系,用节点表示活动。
4.分析活动网络图:分析活动网络图,找出关键路径和关键活动。
关键路径是指项目完成所需的最长时间路径,关键活动是指在关键路径上的活动。
通过分析关键路径和关键活动,可以确定项目完成所需的最短时间,以及如何调整项目进度。
二、TA(时间调整)方法TA方法是一种时间调整方法,通过对项目中的活动进行时间调整,来满足项目的时间要求。
TA方法主要包括延长活动时间和缩短活动时间两种调整方式。
延长活动时间:当项目进度延迟时,可以通过延长活动时间来弥补延迟。
延长活动时间的方式有两种:加班和调整资源。
对于加班方式,可以增加员工的工作时间或者增加员工数量,以加快活动的完成速度。
对于调整资源方式,可以调配更多的资源或者更高效的资源,以加快活动的完成速度。
缩短活动时间:当项目进度需要提前完成时,可以通过缩短活动时间来实现。
基于UWB技术的室内移动机器人跟随系统设计
2021年4期科技创新与应用Technology Innovation and Application设计创新引言快速发展的机器人行业,为人们提供多种服务于室内的移动机器人[1]。
随着我国人口老龄化愈发严重,年轻人迫于生活压力不得不忙于工作,为更好地服务于老年人和残障人士的生活,设计一款基于UWB 的跟随机器人来提供陪伴和看护任务。
超宽带(Ultra Wide-Band ,UWB )技术是一种脉冲无线电,在很长一段时间内,UWB 技术一直应用于军事领域。
2002年开始,美国联邦通讯委员会(FCC )才批准将UWB 用于民用,并制定了严格的使用规范[2]。
超宽带系统凭借其远超传统通信系统的带宽而具有超低功耗、多径分辨率能力更高、更易于集成以及定位性能高等优点,故选用超宽带作为机器人的通信系统,可满足移动机器人高精度定位需求。
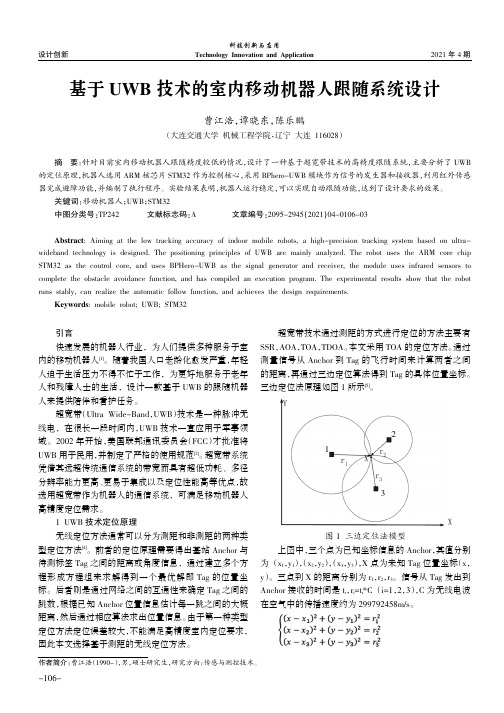
1UWB 技术定位原理无线定位方法通常可以分为测距和非测距的两种类型定位方法[4]。
前者的定位原理需要得出基站Anchor 与待测标签Tag 之间的距离或角度信息,通过建立多个方程形成方程组来求解得到一个最优解即Tag 的位置坐标。
后者则是通过网络之间的互通性来确定Tag 之间的跳数,根据已知Anchor 位置信息估计每一跳之间的大概距离,然后通过相应算法求出位置信息。
由于第一种类型定位方法定位误差较大,不能满足高精度室内定位要求,因此本文选择基于测距的无线定位方法。
超宽带技术通过测距的方式进行定位的方法主要有SSR ,AOA ,TOA ,TDOA 。
本文采用TOA 的定位方法。
通过测量信号从Anchor 到Tag 的飞行时间来计算两者之间的距离,再通过三边定位算法得到Tag 的具体位置坐标。
三边定位法原理如图1所示[5]。
图1三边定位法模型上图中,三个点为已知坐标信息的Anchor ,其值分别为(x 1,y 1),(x 2,y 2),(x 3,y 3),X 点为未知Tag 位置坐标(x ,y )。
AOA和TADV计算方法

1.1测量项基本概念1.1.1 eNB到达角a)b)反映UE相对服务小区的参考方位角,参考方向应为正北,逆时针方向。
是反映UE与服务基站位置关系的主要指标。
本测量数据表示接收的TD-LTE服务小区天线到达角的原始测量值(即Uu 口上报的测量报告中的测量值),其单位符合角度测量量纲。
c)UEd) TS V10.1.0 ,节;,节。
e)取值范围如错误!未找到引用源。
所示,其中第1列表示OMC-北向接口实际上报的样本值,取值类型为整型。
1.1.2时间提前量a)b)反映UE到服务基站的信号传播时间,是反映UE与服务基站距离的主要指标。
本测量数据表示TD-LTE服务小区得到的时间提前量的原始测量值,其单位符合时间测量量纲。
c)UEd) TS V9.6.0 ,和节;,节。
e)取值范围如错误味找到引用源。
所示,其中第1列表示OMC-北向接口实际上报的样本值,取值类型为整型。
利用MR数据来计算距离的方法:1Ts =1心5000*2048)S ,对应的距离等于:(3*10^8*1/(15000*2048))/2= 。
1TADV=16Ts = 16*=通过MR采集服务器获取北向MRO^件,观察MRO文件中AOA和TA每采样时刻的数值。
同时根据路测设备记录的UE实际位置和目标基站实际位置,计算该时刻AOA和TA的理论值, 将二者进行对比分析,已验证测量报告数据中AOA和TA的准确性。
输入参数:UE实际位置信息(x, y)基站实际位置(x,y)约定:将地球近似为一个球体,半径为Radius,设0点为球心,Ue和eNB分别为球面上两点B和A,设夹角AOB为theta。
设经度为lamda,纬度为phi。
一、Tadv理论值计算思路:目标:计算A、B两点间的弧长。
步骤1将A点、B点的球面坐标转换为空间坐标,转换方法如下:球面坐标(r,phi,lamda )对应的空间坐标(x,y,z) 为x= rcos(phi)cos(lamda)y= rcos(phi)s in (lamda)z= rsin( phi)这里不妨设r = 1 ;步骤2:计算OA和OB向量的夹角cos(theta) = ( OA向量和OB向量的点积)/ (向量OA的模*向量0B的模)=OA 向量和OB向量的点积=cos(PhiA)cos(PhiB)cos(LamdaA-LamdaB) + sin (PhiA)si n(PhiB)设Gama = cos(PhiA)cos(PhiB)cos(LamdaA-LamdaB) + sin(PhiA)sin(PhiB)贝U theta = arccos(Gama)步骤3:利用公式Tadv = theta * Radius( 弧长=弧度*半径),得到A、B两点间的弧长二、AOA1论值计算思路:目标:计算A点正北方向切向量Na和AB向量的夹角。
aoa算数优化算法

aoa算数优化算法
AOA算数优化算法是一种基于算数运算和优化思想的算法,可以应用于多种领域的优化问题。
该算法的基本思想是通过对算数运算过程进行优化,寻求问题的最优解。
具体而言,AOA算数优化算法利用了算术平均数、几何平均数、调和平均数等数学工具,对问题进行建模和求解。
同时,该算法还结合了梯度下降、牛顿迭代等优化方法,进一步提高求解效率。
AOA算数优化算法的应用领域广泛,如机器学习、数据挖掘、金融、物流等。
在实际应用中,该算法可以帮助我们更快速、精确地解决复杂的优化问题,提高工作效率和经济效益。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2)AOA提取
AOA提取模板
3)AOA统计说明
AOA报表中的分别对应宏中的0,5,10,150,.......,将数据导入宏中。
计算出“结果”第一列分裂出后,用360度减去该值可得出小区AOA方位角,和基站数据库方位角对比求出角度差。
1
1)现场核实LTE小区天线方位角是否和基站数据库方位角一致;
取上述计算中的最大值,则该30°范围的中间值作为评估的角度。因测量参考方向为正北逆时针方向,最终评估的小区方位角需要360°减去上述评估的角度,所得结果为最终小区评估的方位角(评估计算中需剔除异常数据即评估出的角度的前后各2个采样点数为0时则判断该区间的采样点数据无效);
使用基站数据库小区方位角与MR-eNB天线到达角数据评估的方位角进行对比,如偏差绝对值介于(30°,330°)则判断该小区的方位角存在不合理。
2.2
1)现场核实LTE小区下倾角是否和基站数据库下倾角一致;
2)准确掌握以下工参信息,并导入工具进行计算。
如海拔差可根据google地图的海拔计算,海拔差=覆盖目标海拔-基站海拔(不含天线挂高)。
天线挂高
海拔差
95%采样点TA值
TA覆盖距离
垂直半功率角
机械下倾角
atan
∏
电倾角
3)计算实际下倾角和TA计算出下倾角的差值;
TA覆盖距离及下倾角计算方法:
1)统计TA采样点数占总采样点数比例>95%的最大TA值。
2)TA覆盖距离=最大TA值*78.12(米)
3)机械下倾角(TA)=atan(天线挂高/TA覆盖半径)*180/pi()-电子下倾角倾角+垂直半功率角/2,具体计算方法如下(表中绿色字体为需要手动输入的值):
4)对比机械下倾角(TA)和基站数据库的下倾角,挑选出两者差值>2度的小区进行现场核查调整。
4)如果实际下倾角和TA计算出下倾角的差值<2度,可不进行调整,但需要更新基站数据库数据;如果实际下倾角和TA计算出下倾角的差值>2度,需要对下倾角进行调整。
基于AOA和TA的方位角下倾角调整方法
1
1
1)MR.AOA.AOA采样点数,筛选采样点总数≥1000的小区作为有效数据进行下述计算;
求和计算每30°范围内采样点数的最大值,即[0,30)、[5,35)、[10,40)……[350,20)、[355,35),共计72个;
2)计算实际方位角和AOA方位角的差值;
3)如果实际方位角和AOA方位角差值<30度,可不进行调整,需要对基站数据库方位角字段进行更新;如果实际方位角和AOA方位角差值>30度,需要按照AOA方位角进行调整。
4)如果调整后小区方位角和共站其它LTE小区的夹角<60度,其它小区需要联动调整,保证夹角>60度。
5)如果核实AOA方位角和实际方位角差值>120度,需要现场核实是否存在天馈接反问题。
说明:目前仅中兴机型AOA数据验证准确度比较高,可作为调整依据;其他机型AOA方位角仅作为参考(华为机型AOA存在跳变,需在下个版本中解决,分析结果暂不作为依据),需要结合现场勘查情况制定调整方案。
2
2
TA(时间提前量)提取方法:共享模版-LTE时间提前量查询