《微机电系统基础》4.1 4.4 4.7 6.2 6.7 6.9
第二章微机电系统功能材料 微机电系统技术基础课件
2020/10/22
微机电系统技术
22
微机电系统功能材料
硅-蓝宝石材料是通过外延生长技术将硅 晶体生长在蓝宝石衬底上形成的。硅晶体 可以认为是蓝宝石的延伸部分,二者构成 硅-蓝宝石晶片。
蓝宝石的特点:迟滞和蠕变小;化学稳定 性好 ,耐腐蚀,抗辐射性强;机械强度 高。
2020/10/22
微机电系统技术
below 0.3 micron ultra-violet to 18 micron long-wave
infrared (LWIR). We offer large FPAs in 4096 x 4096
mosaics for a wide range of applications including
在微机械结构中。或同时利用其机械特 性和电气特性,继而产生出新一代的硅 机电器件和装置。
2020/10/22
微机电系统技术
2
微机电系统功能材料
2.1 硅材料 2.1.1 单晶硅 一.硅材料有很多的优点:
比铝轻,比不锈钢的拉伸强度高,硬度高,弹 性好,抗疲劳;
一般条件下抗腐蚀性好,耐高温;
现有的硅加工技术成熟,加工精度高,可以降 低研制费用;
可以将传感、致动部分和电路部分集成在一块 芯片上。
2020/10/22
微机电系统技术
3
微机电系统功能材料
二.硅晶体结构
2020/10/22
微机电系统技术
6
2020/10/22
微机电系统技术
7
2020/10/22
微机电系统技术
8
2020/10/22
微机电系统技术
9
2020/10/22
微机电系统技术
微机电系统及其相关技术教材课程

微型飞行器是一种小型化的无人机,具有体积小、重量轻、飞行灵活等特点。微 型飞行器广泛应用于侦查、通信中继、环境监测等领域,如微型无人机等。
05
教材课程安排
05
教材课程安排
课程目标与内容
01 掌握微机电系统的基本概念、原理和应用 领域。
02
熟悉微机电系统的设计、制造、测试和可 靠性等方面的知识。
制造精度与误差控制
分析制造过程中的误差来源,如工艺波动、设备误差等, 采取相应的控制措施,以提高制造精度和减小误差。
制造工艺与实现
制造工艺选择
根据设计需求和材料特性,选择合适的制造工艺,如体微 加工、表面微加工、LIGA等。
制造流程规划
制定详细的制造流程,包括前处理、光刻、刻蚀、镀膜、 去胶等步骤,确保制造过程中的质量控制和成本控制。
根据设计需求和材料特性,选择合适的制造工艺,如体微 加工、表面微加工、LIGA等。
制造流程规划
制定详细的制造流程,包括前处理、光刻、刻蚀、镀膜、 去胶等步骤,确保制造过程中的质量控制和成本控制。
制造设备与环境
了解所需的制造设备和制造环境,如光刻机、等离子刻蚀 机、镀膜设备等,以及制造过程中的环境控制要求。
前景
随着物联网、人工智能等技术的不断发展,微机电系统的应用前景将更加广阔, 有望在智能制造、智能家居、智能交通等领域发挥重要作用。
应用领域与前景
应用领域
微机电系统广泛应用于汽车安全气囊、喷墨打印机、压力传感器、加速度计、 陀螺仪等领域。
前景
随着物联网、人工智能等技术的不断发展,微机电系统的应用前景将更加广阔, 有望在智能制造、智能家居、智能交通等领域发挥重要作用。
实验三
微流体实验,让学生了解微流 体的特性和应用。
电气工程及其自动化专业导论-第6章 电工理论与新技术

哈尔滨理工大学
电气工程及其自动化专业导论
目录
第1章 电气工程及其本科教育 第2章 电机电器及其系统 第3章 电力系统及其自动化 第4章 电力电子与电力传动 第5章 高电压与绝缘技术 第6章 电工理论与新技术
第6章 电工理论与新技术
第六章目录
6.1 电工理论与新技术的主要内容 6.2 电工理论研究进展 6.3 新能源技术 6.4 无线电能传输 6.5 超导电力技术 6.6 磁悬浮技术 6.7 脉冲功率技术 6.8 生物电磁学 6.9 微机电系统 6.10 电工新技术展望
场与物质相互作用问题。
第6章 电工理论与新技术
6.2 电工理论研究进展
6.2.3 电工理论发展方向
2. 电网络 超宽带信号采集理论与系统 模拟及模数混合信号电路设计、测试与故障诊断 电路设计与测试自动化 宽频电暂态的建模与分析 非线性电路分析与设计理论 基于计算机科学、物理学、人工智能新成果的电路建模、分析、设计和诊断技术 智能电网数据分析与处理 学科拓展与交叉研究领域
题,深化研究各类电磁场数值计算方法,提高求解大规模工程实际问题的能力。 新型磁性材料建模方法:针对新型磁性材料的快速发展,深入研究磁性材料磁化与损耗的建
模方法;针对电工设备节能优化设计需要,深入研究磁性材料的磁化与损耗特性机理。 电磁场与物质的相互作用:主要研究高电压、大电流、强功率条件下的特定电磁装置中电磁
第6章 电工理论与新技术
6.3 新能源技术
6.3.1新能源发电
太阳能发电的基本原理是利用光电效应,将太阳辐射转化为电能。太阳能发电由于无污染 、无噪声、运行维护简单、应用环境几乎不受地域影响,资源总量非常丰富,因此一直以来受到 人们的青睐,还被认为是新世纪的主要能源。
微机电系统工程基础课程设计

微机电系统工程基础课程设计随着人们对科技的不断研究和探索,微机电系统(MEMS)作为一种新兴技术正在得到越来越多的关注。
微机电系统工程基础课程设计是专门针对MEMS领域的基础性课程,旨在帮助学习者掌握MEMS相关的理论、设计与制造基础知识和技能。
课程目标微机电系统工程基础课程设计的核心目标是使学生掌握MEMS系统设计的基础理论和工程方法,包括MEMS相关材料、工艺、器件设计、技术实现、测试和质量控制等方面的知识。
通过学习,学生将掌握以下技能:•了解MEMS领域的基础知识•熟悉MEMS设备的制造流程•能够设计MEMS相关的器件和系统•能够进行MEMS技术的实现和测试课程内容微机电系统工程基础课程设计内容包括以下板块:1. MEMS基础知识1.MEMS相关定义2.MEMS分类和应用领域3.MEMS发展历程和趋势2. MEMS材料和工艺1.MEMS材料2.MEMS制备工艺和技术3.MEMS加工技术和设备3. MEMS器件设计1.MEMS传感器和执行器原理2.MEMS器件设计方法3.MEMS器件结构和参数4. MEMS技术实现1.MEMS技术实现原理2.MEMS技术实现方法3.MEMS器件测试技术及方法5. MEMS质量控制1.MEMS器件制造过程的质量控制2.MEMS器件测试过程的质量控制3.MEMS器件可靠性测试课程评估方式微机电系统工程基础课程设计的评估方式主要采用以下的形式:•平时课堂实验和作业占30%•设计课程实践项目占30%•期末考试占40%课程实践项目1.设计并制造一个MEMS流量传感器2.利用MEMS技术制造和测试一个微型压力传感器3.设计和实现一个MEMS陀螺仪系统参考书籍1.MEMS传感器设计与制造,张三、李四,电子工业出版社,2012年。
2.微机电系统原理、技术与应用,王五、赵六,清华大学出版社,2009年。
3.MEMS技术入门,郭七、张八,机械工业出版社,2010年。
总结微机电系统工程基础课程设计是一门理论与实践相结合的课程,学生将在课程中掌握MEMS系统设计的基础理论和工程方法,同时能够进行实践项目,帮助学生实现理论和知识的转化,提高学生的实践能力和锻炼自己的设计能力,提高学生的专业水平。
微机电系统的基本工作原理分析

当作用力的方向改变时,电荷的极性也随之改变。相反,当在电介质的极化方向上施加电场,这些电介质也会发生变形,电场去掉后,电介质的变形随之消失,这种现象称为逆压电效应,或称为电致伸缩现象。
压电效应的可逆性
3.2应用
压电式压力传感器是利用压电材料所具有的压电效应所制成的。由于压电材料的电荷量是一定的,所以在连接时要特别注意,避免漏电。
第四章静电效应
4.1工作原理分析
许多微执行器利用静电力作为驱动力,静电驱动是有一种使电能转换成机械能的方法。静电执行器就是利用异性电荷的库仑力作用来实现机械运动的,可以看成是两块带有相反电荷的平行板相互吸引,产生变形而制动。在微电机和微执行器的设计中,准确估计静电力的大小非常重要,在估计这种微执行器产生的力时,往往需要忽略静电力和施加电压之间的非线性关系。
2)驱动力与体积比较高,静电力大小与尺寸的平方成比例,尺寸越小,间隙越小,单位体积产生的静电力越大。
3)采用电压驱动,易于控制和高速化,可实现低功耗。另外,其制造工艺和IC工艺相仿,易于集成。
但是静电微执行器应用中也存在如下问题:
1)理论上静电执行器耗能量非常低,但是由于边缘场的影响以及表面泄露等原因,实际的输出能量和效率远低于对他进行理论分析得到的值。
2)分辨率高:由于它是一种非机械结构传感器,因而分辨率极高。
3)体积小、重量轻、频率响应高:由于芯体采用集成工艺,又无传动部件,因此体积小,重量轻。小尺寸芯片加上硅极高的弹性系数,敏感元件的固有频率很高。在动态应用时,动态精度高,使用频带宽,合理选择设计传感器外型,使用带宽可以从零频至100千赫兹。
6.3特点
与静电,热力的和压电驱动微执行器相比,形状记忆合金驱动具有最大做功密度大,机构简单,柔软易变形,驱动电压低,尺寸可在微米级别,但是不足之处在于:形状记忆合金在微执行器上应用时,难以与硅的制作工艺兼容。
微机电系统工程基础知识单选题100道及答案解析

微机电系统工程基础知识单选题100道及答案解析1. 微机电系统中常用的制造工艺不包括()A. 光刻B. 蚀刻C. 铸造D. 薄膜沉积答案:C解析:铸造一般不用于微机电系统的制造,光刻、蚀刻和薄膜沉积是常见工艺。
2. 微机电系统的特征尺寸通常在()量级A. 毫米B. 微米C. 纳米D. 厘米答案:B解析:微机电系统的特征尺寸通常在微米量级。
3. 以下哪种材料常用于微机电系统的结构层()A. 玻璃B. 陶瓷C. 硅D. 塑料答案:C解析:硅具有良好的电学和机械性能,常用于微机电系统的结构层。
4. 微机电系统中的传感器不包括()A. 压力传感器B. 温度传感器C. 速度传感器D. 重量传感器答案:D解析:在微机电系统中,一般没有专门的重量传感器。
5. 微机电系统的驱动方式不包括()A. 静电驱动B. 电磁驱动C. 液压驱动D. 热驱动答案:C解析:液压驱动在微机电系统中不常用。
6. 以下哪种技术用于微机电系统的封装()A. 塑料封装B. 陶瓷封装C. 金属封装D. 以上都是答案:D解析:塑料、陶瓷、金属封装都可用于微机电系统。
7. 微机电系统中的执行器不包括()A. 微电机B. 微阀C. 微泵D. 微控制器答案:D解析:微控制器不属于执行器,而是控制部分。
8. 微机电系统的设计过程中,首先进行的是()A. 系统级设计B. 器件级设计C. 工艺设计D. 版图设计答案:A解析:设计过程通常先从系统级设计开始。
9. 以下哪种软件常用于微机电系统的设计仿真()A. ANSYSB. AutoCADC. PhotoshopD. Word答案:A解析:ANSYS 常用于工程领域的设计仿真,包括微机电系统。
10. 微机电系统的应用领域不包括()A. 生物医学B. 航空航天C. 农业D. 通信答案:C解析:农业领域相对较少直接应用微机电系统。
11. 微机电系统制造中,用于刻蚀二氧化硅的常用试剂是()A. 氢氟酸B. 盐酸C. 硫酸D. 硝酸答案:A解析:氢氟酸常用于刻蚀二氧化硅。
微机电基础第三章
A t tox 1 2 1 2 A / 4B
2 t0 At0 B
要注意的是,当氧化层比较厚时,氧化速率将随氧化层厚 度的变化而改变。因此,如果在氧化开始时已存在初始氧化层 厚度 t0 ,则氧化完成后的氧化层厚度并不是无 t0 时氧化得到的 氧化层厚度与 t0 之和,而必须先用 t0 确定τ,再将τ与 t 相加得
说明:热生长
HUAZHONG AGRICULTURAL UNIVERSITY Bao 14
金属层间绝缘阻挡层
目的:用做金属连线间的保护层。
Passivation layer Interlayer Oxide
Bonding pad metal
ILD-5 ILD-4
Metal 3
Metal 4
说明:这种氧化硅不是热生长的,而是淀积的。
Metal
Diffused resistors p+ Silicon substrate
说明:热生长几百埃的厚度
HUAZHONG AGRICULTURAL UNIVERSITY
Bao 11
掺杂阻挡层
目的:作为掺杂或注入杂质到硅片中的掩蔽材料
Phosphorus implant
Barrier Oxide
Bao 24
方程中的参数 A、B 可利用图 4.2 、图 4.3 直接查到。
HUAZHONG AGRICULTURAL UNIVERSITY
HUAZHONG AGRICULTURAL UNIVERSITY
Bao 25
HUAZHONG AGRICULTURAL UNIVERSITY
Bao 26
Hks Pg d tox dt N1 1 kstox / DSiO2
微机电系统技术基础课件 4
2020/1/11
微机电技术基础
4
•隔离问题
微机械制造技术
a硬隔离
b软隔离
TR 1 ( fh / fs )2 1 硬隔离 能量传递函数
TR 1 ( f s / fl )2 1
软隔离 能量传递函数
fh,fs 代表边缘支座和硅膜 片的固有频率
fl,fs 代表软隔离带和硅膜 片的固有频率
2020/1/11
为实现微结构互联中的电隔离,常在衬底材料 表面淀积起绝缘作用的介质膜。
2020/1/11
微机电技术基础
7
微机械制造技术
3.5.2 键和方法 3.5.2.1阳极键合 1.概述
阳极键合又称静电键合或场助键合。阳极键合技 术可将硅与玻璃、金属及合金在静电场作用下 键合在一起,中间务需任何粘接剂。
特点:键合界面具有良好的气密性和长期的稳定 性。
微机械制造技术
3.5 固相键合技术 3.5.1 技术要求 1.概述
固相键合技术是利用各种结合工艺,把若干具 有平面结构的零件重叠接合在一起,构成三维 结构部件。常用的键合方法有:
(1)阳极键合 (2)热熔键合(3)共熔键合(4) 低温玻璃键合及冷压焊接等
2020/1/11
微机电技术基础
1
微机械制造技术
在室温下用去离子水冲洗干净, 并 用 N2气 烘 干
微机电技术基础
17
(2)Si-Si键合过程
Si-Si直接键合(SDB) 将2硅片表面抛光成镜面
表面处理剂清洗
2镜面硅片铁和,靠亲和力, 形成自身键合。
高温(700℃-1000℃)处理, 有利于消除键合面的孔洞。
2020/1/11
形成高强度的键合面。
3
电子封装、微机电与微系统第四章 封装工艺
1
4.2 厚 膜 技 术
厚膜材料是有机介质掺入微细金属粉、玻璃粉或陶瓷 粉末的混合物,通过丝网印刷工艺,印制到绝缘基板上。 无机相金属粉可确定厚膜成分:
● 金属或金属合金组成无机相导体; ● 金属合金或钌(Ruthenium)系化合物组成厚膜电阻; ● 玻璃或玻璃陶瓷无机相组成多层介质、密封剂或高介 电常数的电容层。
第四章 封 装 工 艺
1
图4-12 寄生电容
第四章 封 装 工 艺
1
4.8 倒装芯片技术
倒装芯片技术(Flip Chip Technology,FCT)是1960年首 先由IBM公司设计并开发研制出来的,但一直到近几年才 开 始应用于高速、单芯片微处理器或微电子集成芯片。倒装芯 片技术应用于少数功率器件,则是在最近的时间内。
第四章 封 装 工 艺
1
3. 孔内电连通 斜孔深度一般有几百微米,要在其侧壁上形成电通路, 通常可采用溅射、蒸发、电镀等方法。直孔电连通的常用 方法有低温化学淀积、熔融金属淀积、电镀等。
第四章 封 装 工 艺
1
4. 重布线 通孔内金属层制作完毕后,可以采用类似于集成电路
的再分布技术对键合好的圆片表面进行重新布线。
第四章 封 装 工 艺
1
2) 保温段 保温段是指温度从120℃~150℃升至焊膏熔点的区域, 其主要目的是使PCB上各元器件的温度趋于稳定,尽量减 少 温差。应保证足够的时间,使较大元器件的上升温度同 较 小元器件上升温度同步,保证焊膏中的助焊剂得到充分 挥 发。
第四章 封 装 工 艺
1
3) 回流段 在回流区域里,加热温度最高,元器件的温度快速上 升至峰值温度。在回流阶段,不同的焊膏,焊接峰值温度 不同,一般为焊膏的熔点温度加20℃~40℃。对于熔点为 183℃的Sn63Pb37焊膏和熔点为179℃的Sn62Pb36Ag2焊膏, 峰值温度一般为210℃~230℃。回流时间不要过长,以防 对PCB及元器件造成不良影响。理想的温度曲线是超过焊 锡熔点“尖端区”覆盖的面积最小。
《微机电系统概论》PPT课件讲课讲稿

Park公司开发研制出用于扫描隧道显微镜(STM)和原 子力显微镜(AFM)的微型传感器;Texas公司开发出 用于彩色图像投影显示的数字镜面器件(DMD);AD 公司开发研制的加速度计,管芯尺寸为1.5mm*1.5mm, 量程达 50g,灵敏度为15mv/g等。
国外的发展现状(2)
当尺寸小到微米或亚微米量级时,会产生微尺寸效 应。它的影响将反映到诸如结构材料、设计理论、制 造方法、在微小范围内各种能量的相关作用及测量技 术等许多方面。也就是说,工程上常用的尺寸缩放法 不适用于由微尺寸元器件组成的微装置;因而,传统 的设计理论、方法及一些物理定律不能完全套用,许 多理念需要更新和重新建立,必须从新的构思出发去 探索微机械由于尺寸效应形成的一些特殊现象和规律。
第一部分
微机电系统概论
(微机电系统的起源、国内外发展现状及应用)
简介
机械与机电系统;宏观机电系统与微机电系统
微机电系统:
它是以微传感器、微执行器以及驱动和控制电路为基本 元器件组成的、可以活动和控制的、机电合一的微机械 装置。
特点:
1、学科交叉(力学、机械、电学、光学、电磁学、生 物、化学等学科)2、微型化、集成化和智能化;3、 低成本批量化;4、应用广泛(军民两用)5、高新技 术。
用它进行的操作是极其微细的,有的操作已经到了单个 细胞乃至分子范筹;有的微型敏感元件能敏感到单个原 子,能进行原子量级的探测。如此细微的工作状况,用 肉眼是不能分辨的,必须借助显微术或专用仪器来观察 和控制。
微机电系统的发展状况 微机械电子系统,即微机械技术,是20世纪80年代后 期国际上兴起的一项高技术。它以集成电路技术、表面 加工技术和纳米精加工技术为基础,具有极大的学科交 叉性,微机电系统的设计与制造涉及到设计、材料、制 造、测试、控制、能源以及连接等相关技术。与传统机 械系统相比,除在尺度上很小外,它还是一种高度智能 化和高度集成化的系统。微机电系统的研究是制造技术 上的一场革命,在21世纪的机械发展过程中将占有主导 地位。 微机械技术将是一项新兴的产业,会优先在生物、医 疗、航空、航天、电子产品、过程控制及测试技术等领 域获得广泛的应用。
微机电系统技术基础教学 MEMS技术概述
2020/1/11
NUC 2012
7
各个国家不同的定义
美国:微型机电系统
MEMS: Micro electro mechanical system
日本:微机械
Micro machine
欧洲:微系统
Micro system
2020/1/11
NUC 2012
8
从国际上开发MEMS的情况看,美国侧重在微 电子技术的基础上,通过微芯片取得制造工艺 的突破;日本则侧重从机械加工工艺实现微机 械的制造,强调通过非光刻的传统机械线实现 机械微型化,是一条用大机器制造小机器,用 小机器造微机器的途径;德国的特色是在LIGA 工艺的应用上取得进展。这些国家的加工工艺 各有特色,但均取得显著成效。 总体来看,目前美国和日本处于微米/纳米技术 技术领先地位。我们应在利用国外各种微加工 工艺的基础上努力创新。
2020/1/11
NUC 2012
18
MEMS发展历史回顾
1967年:发明了表面微机械加 工技术;
1970年:第一个硅微加速度计 演示成功;
1977年:第一个整体式电容式 压力传感器;
1988年:美国加州大学伯克利 分校研制的静电微电机,标志
着MEMS时代的到来;
1995年:开始了Bio-MEMS的研 究;
35
典型MEMS器件——微流体器件
入口阀
双金属膜 硅
泵腔 硅
出口阀
2020/1/11
NUC 2012
36
典型MEMS器件——微型喷
2020/1/11
NUC 2012
37
典型MEMS器件——微电源
锂
三硝基甲苯
甲烷
温差电池,热电发生器
《微机电系统》PPT课件

particle0s.5uomf /s1iftz3e>
of
air. 100class, 10class
3. X-Ray lithography
A type of light lithography techniques using short wavelength X-Rays Pros • Fast process • High aspect ratio • Solves depth of focus problem • High resolutions of ~ .5 µm • Reduction in diffraction,
4. Electron Beam Lithography
As scanning electron microscopes, an
electron beam scans across the substrate surface and exposes electron
sensitive coating.
2) Commonly used MEMS materials
Category
Material
Property or application
Metal
Au,Al,Cu,Ni,Cr
Conductor
Silicon
Structure, semiconductor
微机电系统4
Comb Drive Failure Modes
Wobble motors
Are so called because of the rolling action by which they operate. A surface micromachined wobble motor design. --The rotor is a circular disk. --In operation the electrodes beneath it are switched on and off one after another. --The disk is attracted to each electrode in turn; the edge of the disk contacting the insulator over the electrode.
--In this manner it rolls slowly around in a
circle; making one revolution to many revolutions of the stator voltage. Problems --If the insulating materials on the stator electrodes wear rapidly, or stick to the rotor. --If the rotor and bearing aren't circular, then the
Piezoelectric压电的 actuation --currently look most promising Hydraulic液压的 actuation 液压的 --currently look most promising Thermal热 actuation 热 --require relatively large amounts of electrical energy, and the heat generated also has to be dissipated消散. 消
《微机电系统基础》4.1 4.4 4.7 6.2 6.7 6.9
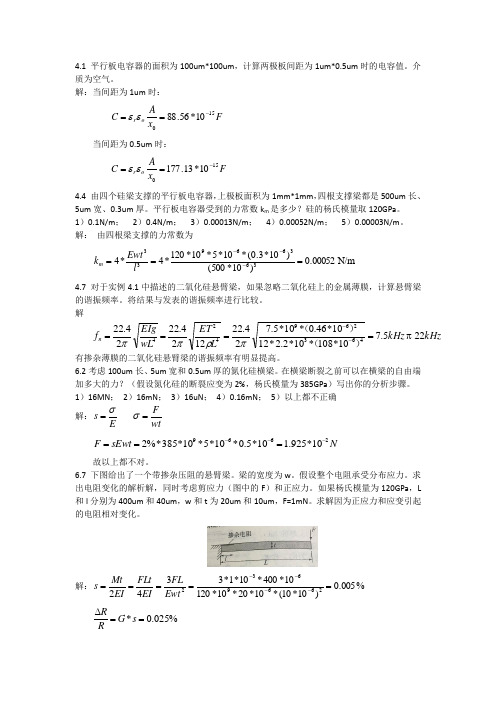
4.1 平行板电容器的面积为100um*100um ,计算两极板间距为1um*0.5um 时的电容值。
介质为空气。
解:当间距为1um 时:F x A C o r 15010*56.88-==εε 当间距为0.5um 时:F x A C o r 15010*13.177-==εε 4.4 由四个硅梁支撑的平行板电容器,上极板面积为1mm*1mm ,四根支撑梁都是500um 长、5um 宽、0.3um 厚。
平行板电容器受到的力常数k m 是多少?硅的杨氏模量取120GPa 。
1)0.1N/m ; 2)0.4N/m ; 3)0.00013N/m ; 4)0.00052N/m ; 5)0.00003N/m 。
解: 由四根梁支撑的力常数为N/m 00052.0)10*500()10*3.0(*10*5*10*120*4*436366933===---l Ewt k m 4.7 对于实例4.1中描述的二氧化硅悬臂梁,如果忽略二氧化硅上的金属薄膜,计算悬臂梁的谐振频率。
将结果与发表的谐振频率进行比较。
解有掺杂薄膜的二氧化硅悬臂梁的谐振频率有明显提高。
6.2考虑100um 长、5um 宽和0.5um 厚的氮化硅横梁。
在横梁断裂之前可以在横梁的自由端加多大的力?(假设氮化硅的断裂应变为2%,杨氏模量为385GPa )写出你的分析步骤。
1)16MN ; 2)16mN ; 3)16uN ; 4)0.16mN ; 5)以上都不正确 解:E s σ= wtF =σ N sEwt F 266910*925.110*5.0*10*5*10*385*%2---===故以上都不对。
6.7 下图给出了一个带掺杂压阻的悬臂梁。
梁的宽度为w 。
假设整个电阻承受分布应力。
求出电阻变化的解析解,同时考虑剪应力(图中的F )和正应力。
如果杨氏模量为120GPa ,L 和l 分别为400um 和40um ,w 和t 为20um 和10um ,F=1mN 。
微机电基础第六章
利用脉冲宽度调制器和电容测量相结合,可使 可动极板精确地保持在中间位置。采用这种脉 冲宽度调制的静电伺服技术,脉冲宽度与被测 加速度成正比,现通过测量脉冲宽度来测量加 速度。
在外力的作用下,结 构中的薄膜或梁上产 生应力分布,应力的 存在使得压敏电阻的 阻值发生变化
E
压阻变化的具体过程
电阻的基本关系式 电阻率的变化率 电阻的变化率
其中,
π 为压阻系数
压阻式传感器输出信号的检测一般需要采用惠斯通电桥
R1 R3
R4' R2'
S+
R2 R4
输出电压
R3' R1'
O+
S2- S1-
向加热元件施加一定的热功率,加热元件周围形 成温度场,流体流动使温度场发生变化,分别位于 上下游的检测元件之间就会产生温差。
被测流体的质流量 与加热件上下游端的温度 差T之间的关系为:
P:加热功率,J:热功当量 cp:被测流体的定压比热
微型力学传感器
1、微型压力传感器 a)硅压阻式压力传感器:
微传感器的分类
按传感机理分 压阻、压电、隧道、电容、谐振、热对流
按物理参数分 力(加速度/压力/声) 热(热电偶/热阻) 光(光电类) 电磁(磁强计) 化学和生物医学(血糖/电容化学/化学机械)
微传感器的敏感原理
(1)压阻敏感原理
当压力作用在单晶硅上时,硅晶体的电阻发生显著变 化的效应称为压阻效应。
在传统物理学中,电子没有获得足够的能量是不能穿过 势垒的,但是在量子力学中,电子通过波函数描述,满足 薛定谔方程,可以产生隧道电流
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.1 平行板电容器的面积为100um*100um ,计算两极板间距为1um*0.5um 时的电容值。
介质为空气。
解:当间距为1um 时:
F x A C o r 150
10*56.88-==εε 当间距为0.5um 时:
F x A C o r 150
10*13.177-==εε 4.4 由四个硅梁支撑的平行板电容器,上极板面积为1mm*1mm ,四根支撑梁都是500um 长、5um 宽、0.3um 厚。
平行板电容器受到的力常数k m 是多少?硅的杨氏模量取120GPa 。
1)0.1N/m ; 2)0.4N/m ; 3)0.00013N/m ; 4)0.00052N/m ; 5)0.00003N/m 。
解: 由四根梁支撑的力常数为
N/m 00052.0)
10*500()10*3.0(*10*5*10*120*4*4363
66933===---l Ewt k m 4.7 对于实例4.1中描述的二氧化硅悬臂梁,如果忽略二氧化硅上的金属薄膜,计算悬臂梁的谐振频率。
将结果与发表的谐振频率进行比较。
解
有掺杂薄膜的二氧化硅悬臂梁的谐振频率有明显提高。
6.2考虑100um 长、5um 宽和0.5um 厚的氮化硅横梁。
在横梁断裂之前可以在横梁的自由端加多大的力?(假设氮化硅的断裂应变为2%,杨氏模量为385GPa )写出你的分析步骤。
1)16MN ; 2)16mN ; 3)16uN ; 4)0.16mN ; 5)以上都不正确 解:E s σ
= wt
F =σ N sEwt F 266910*925.110*5.0*10*5*10*385*%2---===
故以上都不对。
6.7 下图给出了一个带掺杂压阻的悬臂梁。
梁的宽度为w 。
假设整个电阻承受分布应力。
求出电阻变化的解析解,同时考虑剪应力(图中的F )和正应力。
如果杨氏模量为120GPa ,L 和l 分别为400um 和40um ,w 和t 为20um 和10um ,F=1mN 。
求解因为正应力和应变引起的电阻相对变化。
解:%005.0)10*10(*10*20*10*12010*400*10*1*33422
6696
32=====----Ewt FL EI FLt EI Mt s %025.0*==∆s G R
R
kHz kHz L ET wL EIg f n 225.710*108*10*2.2*1210*46.0*10*5.724.221224.2224.22463269424 ====--)
()(πρππ
6.9 对于上题中的情况,讨论把电阻长度增加到四倍后的优点和缺点。
解:电阻的长度增加到4倍后,电阻值也增加了4倍,由应变产生的尺寸的相对变化将变得更小,在有限的泊松比下横截面积会减小,电阻的相对变化会降低4倍,压阻传感器的压阻应变系数也随之降低4倍,灵敏度降低。
通常增加的电阻的长度不直接延长,而是采用之字形的导电通路。