模拟串口全双工
USB虚拟串口设计

毕业设计 [论文]题目:基于STM32的USB虚拟串口学院:电气与信息工程学院专业:电气工程及其自动化姓名:学号:指导老师:完成时间:2015年5月19日河南城建学院本科毕业设计(论文)中文摘要摘要USB接口是最为简单的接口,它具有传输速度快、即插即用、端口扩展简单有效等特点,在数据传输技术飞速发展的当代USB接口得到广泛的应用。
越来越多的电脑设备开始采用USB接口进行数据的传输,而通用异步串行通信口(简称串口或者COM口)是一种比较古老的串行通信口,在几年前的PC上,几乎是必备接口。
以前的设备与PC相连基本上都是用的COM口,那么将设备移植到USB接口成为人们研究的热门。
本论文以USB通信设备类中的抽象控制模型为基础,对通信设备类及实现虚拟设备的原理进行了研究,设计并实现了基于通信设备类的虚拟串口驱动程序。
论文研究设计了基于STM32单片机的USB虚拟串口驱动程序的结构和实现方案,该程序主要由通信命令转换和数据传输两部分构成,虚拟串口的实现技术在数据传输方面进行了改进。
论文的主要工作如下:1.研究了USB协议的请求和传输模式,分析了通信设备类实现虚拟设备的方案。
2.给出了一种符合通信设备类中抽象控制模型的虚拟串口实现方案。
该方案提供了一种基于通信设备类开发虚拟设备的模板,对设计中的诸多问题进行了详细的说明,并改进了虚拟串口驱动程序中数据的处理流程。
3.将改进后的数据处理流程是现在虚拟串口中,生成的一种基于通信设备类的虚拟串口稳定、高速。
最后,在串口测试软件下对虚拟串口驱动程序进行了测试,达到了预期目标。
关键字:通讯设备类,枚举过程,虚拟串口程序,抽象控制模型河南城建学院本科毕业设计(论文)AbstractAbstractUSB interface is the most simple interface, it has the transmission speed, plug and play, port extension characteristics such as simple and effective, in rapid development of the contemporary USB data transmission technology has been widely used. More and more computer equipment used USB interface for data transmission, and the universal asynchronous serial communication port (hereinafter referred to as a serial port or COM) is a relatively old serial communication port, in a few years ago on a PC, is almost a necessary interface. Before the equipment connected to the PC are basically use the COM, then transplanted device into the USB interface become a hot research.Abstract in this paper by USB communication device class control model, based on the communication device class and realize the principle of virtual device are studied, designed and implemented based on the virtual serial port communication device class driver.Thesis study design based on the STM32 MCU USB virtual serial port driver structure and implementation scheme of the program is mainly consisting of communication command conversion and data transmission, the implementation technologies of virtual serial port is improved in terms of data transmission. Paper's main work is as follows:1.to study the requests of USB protocol and transmission mode, analyzes the communication device class implementation scheme of virtual devices.2.presents a communication device class of control model of the implement of virtual serial port. This scheme provides a virtual device based on the communication device class development of templates, to account for the problems in detail in the design, and improve the virtual serial port driver in data processing.3.data processing of the improved process is now in virtual serial port, the generated based on the virtual serial port communication device class stability, high speed. Finally, under the serial test software of virtual serial port driver was tested, and reached the anticipated goal.Keywords: Communication equipment Class ;T he enumeration process;Abstract Control Model河南城建学院本科毕业设计(论文)目录目录摘要 (I)Abstract (II)目录........................................................................................................................................................ I II 第1章绪论. (1)1.1 USB虚拟串口设计背景及其意义 (1)1.2 USB虚拟串口设计研究方法及目标 (2)1.3 USB虚拟串口设计国内外研究现状 (2)第2章USB及串口简单介绍 (4)2.1 USB简介 (4)2.2 串口简介 (4)2.3 USB虚拟串口简介 (5)第3章 USB和USB CDC协议 (6)3.1 通用串行总线USB (6)3.1.1 USB协议相关知识介绍 (6)3.1.2 USB协议枚举过程分析 (8)3.2 USB CDC协议 (9)3.3 USB通信过程 (10)第4章虚拟串口的实现 (12)4.1 串口的工作原理 (12)4.2 USB虚拟串口设计 (13)4.2.1 STM32 USB部分说明 (13)4.4.2 USB电路连接 (14)4.2.3 虚拟串口程序设计 (15)第5章结论 (18)参考文献 (19)致谢 (20)附录: (21)河南城建学院本科毕业设计(论文)第1章绪论第1章绪论1.1 USB虚拟串口设计背景及其意义USB作为一种计算机总线技术,在现在的计算机上已经是不可或缺的了。
串口通信实验报告
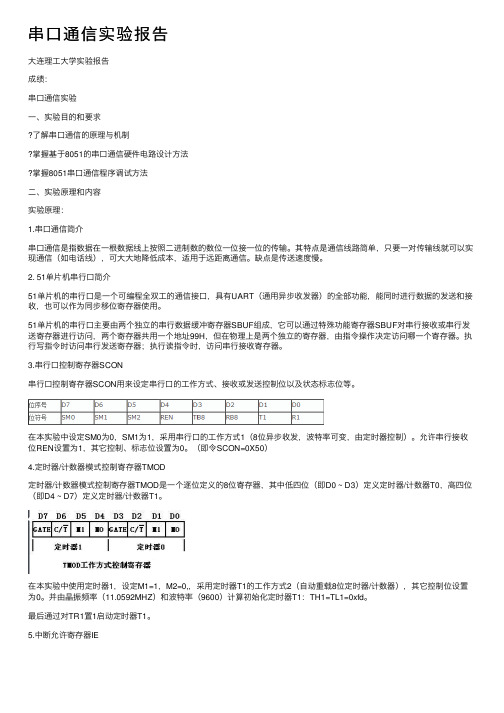
串⼝通信实验报告⼤连理⼯⼤学实验报告成绩:串⼝通信实验⼀、实验⽬的和要求了解串⼝通信的原理与机制掌握基于8051的串⼝通信硬件电路设计⽅法掌握8051串⼝通信程序调试⽅法⼆、实验原理和内容实验原理:1.串⼝通信简介串⼝通信是指数据在⼀根数据线上按照⼆进制数的数位⼀位接⼀位的传输。
其特点是通信线路简单,只要⼀对传输线就可以实现通信(如电话线),可⼤⼤地降低成本,适⽤于远距离通信。
缺点是传送速度慢。
2. 51单⽚机串⾏⼝简介51单⽚机的串⾏⼝是⼀个可编程全双⼯的通信接⼝,具有UART(通⽤异步收发器)的全部功能,能同时进⾏数据的发送和接收,也可以作为同步移位寄存器使⽤。
51单⽚机的串⾏⼝主要由两个独⽴的串⾏数据缓冲寄存器SBUF组成,它可以通过特殊功能寄存器SBUF对串⾏接收或串⾏发送寄存器进⾏访问,两个寄存器共⽤⼀个地址99H,但在物理上是两个独⽴的寄存器,由指令操作决定访问哪⼀个寄存器。
执⾏写指令时访问串⾏发送寄存器;执⾏读指令时,访问串⾏接收寄存器。
3.串⾏⼝控制寄存器SCON串⾏⼝控制寄存器SCON⽤来设定串⾏⼝的⼯作⽅式、接收或发送控制位以及状态标志位等。
在本实验中设定SM0为0,SM1为1,采⽤串⾏⼝的⼯作⽅式1(8位异步收发,波特率可变,由定时器控制)。
允许串⾏接收位REN设置为1,其它控制、标志位设置为0。
(即令SCON=0X50)4.定时器/计数器模式控制寄存器TMOD定时器/计数器模式控制寄存器TMOD是⼀个逐位定义的8位寄存器,其中低四位(即D0 ~ D3)定义定时器/计数器T0,⾼四位(即D4 ~ D7)定义定时器/计数器T1。
在本实验中使⽤定时器1,设定M1=1,M2=0,,采⽤定时器T1的⼯作⽅式2(⾃动重载8位定时器/计数器),其它控制位设置为0。
并由晶振频率(11.0592MHZ)和波特率(9600)计算初始化定时器T1:TH1=TL1=0xfd。
最后通过对TR1置1启动定时器T1。
全站最全最简单的电子通信接口及通信协议总结

全站最全最简单的电⼦通信接⼝及通信协议总结以下是对常⽤电⼦通信接⼝及通信协议的总结↓通信何为通信?在英⽂中,通信⽤Communication表⽰,这个词也有交流的意思。
实际上,通信和交流确实是⼀样的意思。
不过在汉语中,交流常⽤来表⽰⼈与⼈之间的交流;⽽通信⼀般⽤于⽐较专业正式的场合,也就是所谓的术语。
⼈与⼈之间的交流,是信息交换的过程;微机系统或模块之间的通信,就是数据传输的过程了。
接⼝⼈在⽤语⾔交谈时,需要⽤嘴说话,⽤⽿朵听,通过空⽓来传播。
信息的传递依赖嘴巴和⽿朵来进⾏发送和接收。
微机系统的通信,则利⽤电、光等媒介。
最常⽤的是电,表现在数字电路中,就是⾼低电平的变化。
单⽚机的IO⼝能实现⾼低电平的收发,认为它是⼀种通信接⼝。
接⼝是通信所依赖的实体。
信号模拟信号(analogsignal)和数字信号(digital signal)任何的信息都可以⽤模拟信号来表达。
模拟信号是连续⽽平滑的信号,是传感器直接采集的、不加任何处理(采样、滤波)的⾃然界中的信号,即⾃然界中的信号绝⼤多数都是模拟信号(例如连续变化的电流、⼈类说话的声⾳等)。
模拟信号就是把实际的物理值模拟成相应的电信号值,呈现该物理值的信号变化。
但是模拟信号对硬件的灵敏度要求⾼,因为表现的复杂性,也导致容易变形。
⽽数字信号呈现为跳变离散的信号,仅取值有限个离散数值,⽐如⼆进制编码就是⼀种数字信号。
所以数字信号:1、实现了⾼度保真,在传输和存储的时候不容易变形。
2、对硬件的要求低,不需要太精确。
协议⼈在说话时,通过声带振动、⼝型的变化发出不同的声⾳。
这些声⾳按照⼀定的规则,承载了我们所要表达的思想和信息,这套规则称为语⾔。
两个⼈对话,需要使⽤两个⼈都能理解的语⾔进⾏,⼀个只懂中⽂和另⼀个只懂英⽂的⼈,根本没法⽤语⾔交流(当然可以⽤其他⽅式,⽐如⾯部表情、肢体语⾔等)。
同样,微机系统通信时,也要有这样⼀套双⽅都遵从的规定,⽽这个规定被称为协议。
51单片机模拟串口的三种方法

//先传低位
} //查询计数器溢出标志位 void WaitTF0( void ) { while(!TF0); TF0=0; } 接收的程序,可以参考下一种方法,不再写出。这种办法个人感觉不错,接收和 都很准确,另外不需要计算每条语句的指令周期数。 方法三:中断法
中断的方法和计数器的方法差不多,只是当计算器溢出时便产生一次中断,用户 在中断程序中置标志,程序不断的查询该标志来决定是否发送或接收下一位,当然程 断进行初始化,同时编写中断程序。本程序使用Timer0中断。 #define TM0_FLAG P1_2 //设传输标志位 //计数器及中断初始化 void S2INI(void) { TMOD =0x02; //计数器0,方式2 TH0=0xA0; //预值为256-96=140,十六进制A0 TL0=TH0; TR0=0; //在发送或 接收才开始使用 TF0=0; ET0=1; //允许定时
//发送启始
位 Delay2cp(39); //发送8位数据位 while(i--) { TXD=(bit)(input&0x01); Delay2cp(36); input=input>>1; } //发送校验位(无) TXD=(bit)1; 位 Delay2cp(46); } //从串口读一个字节 uchar RByte(void) { uchar Output=0; uchar i=8; uchar temp=RDDYN; //发送8位数据位 Delay2cp(RDDYN*1.5); while(i--) { Output >>=1; if(RXD) Output Delay2cp(35); 占用26个指令周期 } while(--temp) 时间内搜寻结束位。 { Delay2cp(1); if(RXD)break; } return Output;
(7)STM32使用HAL库实现RS485通讯(全双工串口)

(7)STM32使⽤HAL库实现RS485通讯(全双⼯串⼝)⼀、硬件如下图所⽰,485芯⽚链接到单⽚机的USART2上,但是默认的USART2并不是在PD5和PD6上,这⾥是需要重映射的。
另外PG4作为485收发的控制(在485协议中,RE、DE同时为⾼电平那么芯⽚使能发送,如果同时为低电平那么芯⽚使能接收)⼆、软件设计1.软件功能默认485芯⽚是接收功能,每隔1s发送⼀个0x88,如果接收到0x55那么返回0x01,如果接收到的数据不是0x55就返回0x00。
2.CubeMX操作(1)时钟(2)调试注意:这⾥⼀定要选择上,否则会导致Jlink⽆法下载,Cube这⾥默认是不使能的,那么调试引脚就会被配置成普通IO。
(3)usart2(4)重映射(5)配置485芯⽚使能引脚-PG4(6)配置时钟,这个要根据具体的芯⽚与晶振来配置(7)配置串⼝,这⾥默认就⾏(8)配置串⼝中断(9)配置485收发使能引脚PG4默认是接收功能,所以是低电平(10)点击⽣成⼯程3.软件设计(1)根据功能,系统要每⼀秒发送⼀个0x88出去,那么就在main的while(1)循环中填写如下代码:while (1){//将485芯⽚设置为发送模式HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_SET);TxByte = 0x88;//发送数据HAL_UART_Transmit(&huart2, (uint8_t *)&TxByte, 1, 0xFF);//将485芯⽚设置为接收模式HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_RESET);HAL_Delay(1000);}(2)如果接收到0x55那么返回0x01,如果接收到的数据不是0x55就返回0x00。
这⾥⽤到中断,写⼀个中断回调函数如下:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){if (0x55 == RxByte){TxByte = 0x01;HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_SET);HAL_UART_Transmit(&huart2, (uint8_t *)&TxByte, 1, 0xFF);}else{TxByte = 0x02;HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_SET);HAL_UART_Transmit(&huart2, (uint8_t *)&TxByte, 1, 0xFF);}HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_RESET); //重新使能串⼝接收中断HAL_UART_Receive_IT(&huart2, (uint8_t *)&RxByte, 1);}(3)默认是要使能485接收的,那么串⼝接收中断默认应该也是开启的,所以在main函数的while(1)之前添加上下⾯的代码:HAL_UART_Receive_IT(&huart2, (uint8_t *)&RxByte, 1);齐活,下载验证:。
基于单片机AT89C51的全双工串行口通信设计
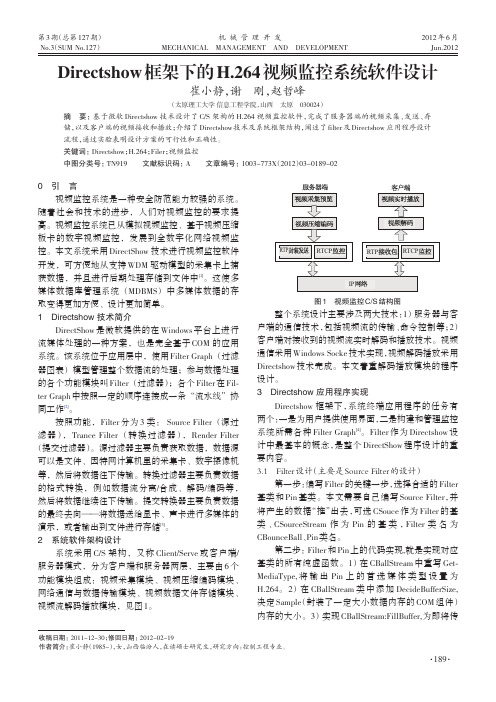
第3期(总第127期)机械管理开发2012年6月No.3(SUM No.127)MECHANICAL MANAGEMENT AND DEVELOPMENT Jun.20120引言视频监控系统是一种安全防范能力较强的系统。
随着社会和技术的进步,人们对视频监控的要求提高。
视频监控系统已从模拟视频监控、基于视频压缩板卡的数字视频监控,发展到全数字化网络视频监控。
本文系统采用DirectShow 技术进行视频监控软件开发,可方便地从支持WDM 驱动模型的采集卡上捕获数据,并且进行后期处理存储到文件中[1]。
这使多媒体数据库管理系统(MDBMS )中多媒体数据的存取变得更加方便、设计更加简单。
1Directshow 技术简介DirectShow 是微软提供的在Windows 平台上进行流媒体处理的一种方案,也是完全基于COM 的应用系统。
该系统位于应用层中,使用Filter Graph (过滤器图表)模型管理整个数据流的处理;参与数据处理的各个功能模块叫Filter (过滤器);各个Filter 在Fil ⁃ter Graph 中按照一定的顺序连接成一条“流水线”协同工作[2]。
按照功能,Filter 分为3类:Source Filter (源过滤器),Trance Filter (转换过滤器),Render Filter (提交过滤器)。
源过滤器主要负责获取数据,数据源可以是文件、因特网计算机里的采集卡、数字摄像机等,然后将数据往下传输。
转换过滤器主要负责数据的格式转换,例如数据流分离/合成、解码/编码等,然后将数据继续往下传输。
提交转换器主要负责数据的最终去向——将数据送给显卡、声卡进行多媒体的演示,或者输出到文件进行存储[3]。
2系统软件架构设计系统采用C/S 架构,又称Client/Serve 或客户端/服务器模式,分为客户端和服务器两层,主要由6个功能模块组成:视频采集模块、视频压缩编码模块、网络通信与数据传输模块、视频数据文件存储模块、视频流解码播放模块,见图1。
串口通讯—全双工和半双工方式
串口通讯—全双工和半双工方式来自中国工控网在串行通信中,数据通常是在两个站(如终端和微机)之间进行传送,按照数据流的方向可分成三种基本的传送方式:全双工、半双工、和单工。
但单工目前已很少采用,下面仅介绍前两种方式。
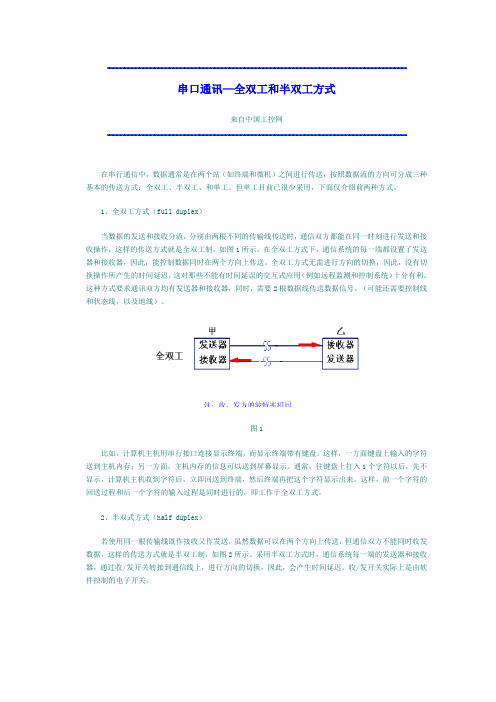
1、全双工方式(full duplex)当数据的发送和接收分流,分别由两根不同的传输线传送时,通信双方都能在同一时刻进行发送和接收操作,这样的传送方式就是全双工制,如图1所示。
在全双工方式下,通信系统的每一端都设置了发送器和接收器,因此,能控制数据同时在两个方向上传送。
全双工方式无需进行方向的切换,因此,没有切换操作所产生的时间延迟,这对那些不能有时间延误的交互式应用(例如远程监测和控制系统)十分有利。
这种方式要求通讯双方均有发送器和接收器,同时,需要2根数据线传送数据信号。
(可能还需要控制线和状态线,以及地线)。
图1比如,计算机主机用串行接口连接显示终端,而显示终端带有键盘。
这样,一方面键盘上输入的字符送到主机内存;另一方面,主机内存的信息可以送到屏幕显示。
通常,往键盘上打入1个字符以后,先不显示,计算机主机收到字符后,立即回送到终端,然后终端再把这个字符显示出来。
这样,前一个字符的回送过程和后一个字符的输入过程是同时进行的,即工作于全双工方式。
2、半双式方式(half duplex)若使用同一根传输线既作接收又作发送,虽然数据可以在两个方向上传送,但通信双方不能同时收发数据,这样的传送方式就是半双工制,如图2所示。
采用半双工方式时,通信系统每一端的发送器和接收器,通过收/发开关转接到通信线上,进行方向的切换,因此,会产生时间延迟。
收/发开关实际上是由软件控制的电子开关。
图2当计算机主机用串行接口连接显示终端时,在半双工方式中,输入过程和输出过程使用同一通路。
有些计算机和显示终端之间采用半双工方式工作,这时,从键盘打入的字符在发送到主机的同时就被送到终端上显示出来,而不是用回送的办法,所以避免了接收过程和发送过程同时进行的情况。
模拟串口的三种方法及C语言
模拟串口的三种方法及C语言模拟串口是软件中模拟实现串口通信的一种方法,它是在电脑上通过软件模拟两个串口之间的传输,用来测试、调试串口相关的应用程序。
本文将介绍三种常见的模拟串口的方法,并提供C语言代码示例。
1.使用虚拟串口软件虚拟串口软件是一种用于模拟串口通信的应用程序。
它创建了虚拟的串口设备,使其在电脑上模拟出真实的串口通信环境。
通过虚拟串口软件,可以实现串口的模拟收发数据,可以连接到串口测试工具、串口调试工具或者自己编写的串口通信程序上。
以下是一个使用虚拟串口软件模拟串口通信的C语言代码示例:```c#include <stdio.h>#include <windows.h>int mai//打开虚拟串口//检测串口是否成功打开printf("Error in opening serial port\n");return 1;}//进行串口通信操作,如发送、接收数据//关闭串口return 0;```在这个示例中,我们使用了Windows操作系统的函数`CreateFile`来打开一个虚拟串口,这里的串口名称是"COM1"。
然后可以调用相关函数进行串口通信操作,最后用`CloseHandle`函数关闭串口。
2.使用串口驱动模拟在一些情况下,可以通过修改电脑的串口驱动程序来模拟串口通信。
这种方法需要更深入的了解操作系统的底层机制,并进行驱动程序的开发和修改。
通过修改串口驱动程序,可以模拟出一个虚拟的串口设备,通过这个设备进行串口通信。
以下是一个简单的C语言代码示例,用于修改串口驱动程序来模拟串口通信:```c#include <stdio.h>#include <fcntl.h>#include <unistd.h>int maiint fd;//打开串口设备fd = open("/dev/ttyS0", O_RDWR);//检测串口是否成功打开if (fd < 0)printf("Error in opening serial port\n");return 1;}//进行串口通信操作,如发送、接收数据//关闭串口设备close(fd);return 0;```在这个示例中,我们使用了Linux操作系统的函数`open`来打开一个串口设备,这里的设备名称是"/dev/ttyS0"。
基于STCSTC15F2K60S2单片机的串口通讯综述

湖南科技大学信息与电气工程学院《单片机课程设计报告》题目:基于STCSTC15F2K60S2单片机的串口通讯专业:自动化班级:一班姓名:罗永恒学号: 1209010303指导教师:范小春2015年 6月 30日单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。
本文将具体介绍单片机与PC机进行串口通信的实现方法和编程方法,并且在最后给出一个实用的单片机与计算机通过串口通信的程序。
关键词:单片机串口通信第一章 STCSTC15F2K60S2的简介 (1)1.1 STCSTC15F2K60S2的内部结构框图 (1)1.2 STC15F2K60S的DIP封装图 (1)1.3 STC15F2K60S的各引脚简介 (2)第二章单片机通过USB与PC机的通信设计 (4)2.1设计方案选择 (4)2.1.1 PC机同单片机通信存在的问题 (4)2.1.2 USB接口同RS-232(DB-9)串口的比较 (4)2.1.3 USB转接芯片的选择 (4)2.2 通信功能要求 (5)第三章硬件电路图的设计 (5)3.1单片机最小系统 (5)3.2 USB与单片机连接主电路 (6)3.3 总电路图 (6)3.4 PCB图 (6)第四章程序设计 (7)4.1 串口初始化 (7)4.2 主程序 (7)4.3 中断服务程序 (8)4.4 总程序 (8)第五章总结与体会 (10)第六章参考文献 (11)第一章 STCSTC15F2K60S2的简介1.1 STCSTC15F2K60S2的内部结构框图1.2 STC15F2K60S的DIP封装图1.3 STC15F2K60S 的各引脚简介(1)电源引脚Vcc :一般接电源的+5V 。
基于WebSocket服务实现Web应用访问本地串口设备

基于WebSocket服务实现Web应用访问本地串口设备作者:钱鑫博来源:《计算机与网络》2020年第14期摘要:浏览器里的Web应用和计算机的串口硬件进行通信时,需要针对不同的浏览器开发不同的插件。
采用HTML5内置的WebSocket技术和QT开发框架,通过WebSocket协议连接本地服务,并通过本地服务绑定串口完成全双工通信的方案,实现了跨浏览器的Web应用与客户端计算机串口通信的技术,解决了为不同浏览器产品及版本开发多种插件的问题。
经过测试验证,达到了预期目标。
关键词:WebSocket;HTML5技术;串口通信中图分类号:TP393文献标志码:A文章编号:1008-1739(2020)14-62-40引言随着互联网的不断发展,软件趋向于网络化,很多计算机上的应用都做成了B/S架构,客户端打开浏览器就可以进行访问。
但是出于安全考虑,浏览器与操作系统进行了隔离,浏览器不允许Web应用直接访问客户端的硬件,访问硬件就只能开发插件。
每种浏览器各自的API 不兼容,Chrome浏览器用NPAPI来执行一个本地程序获取硬件,Firefox浏览器使用JS-Ctypes技术实现插件,然后调用C++代码等来获取本地硬件。
浏览器迭代速度快、接口变化大,开发插件时常遇到浏览器更新导致不能用,客户体验非常差,而且每次都开发对应版本的插件费时费力。
WebSocket是HTML5规范中的一个部分,借鉴了Socket思想,为了Web应用程序和服务端全双工通信而专门制定的一种新的应用层协议。
1 WebSocket协议及帧结构WebSocket Protocol是HTML5中一种新的协议,实现了浏览器与服务器全双工通信(full-duplex)。
在这之前都是客户端主动请求服务端,请求一次应答一次,很多时候实现消息更新都是采用Ajax轮询,有延迟。
有了WebSocket,双方都可以主动发给对端,实现真正的推送。
WebSocket连接创建后,客户端和服务端进行数据交换时,协议控制的数据包头部较小。
80C51系列单片机有一个全双工的串行口
解:编程如下:
LIGHT:MOV SCON,#00H ;串行口方式0 CLR ES ;禁止串行中断 MOV DPTR,#TAB ;置发光二极管亮暗控制字表首址 LP1: MOV R7,#0 ;置顺序编号0 LP2: MOV A,R7 ;读顺序编号 MOVC A,@A+DPTR ;读控制字 CLR P1.0 ;关闭并行输出 MOV SBUF,A ;启动串行发送 JNB TI,$ ;等待发送完毕 CLR TI ;清发送中断标志 SETB P1.0 ;开启并行输出 LCALL DLY500ms ;调用延时0.5秒子程序(参阅例4-13) INC R7 ;指向下一控制字 CJNE R7,#30,LP2 ;判循环操作完否?未完继续 SJMP LP1 ;顺序编号0~29依次操作完毕,从0开始重新循环 TAB: DB 0FFH,7FH,3FH,1FH,0FH,07H,03H,01H,00H;从左向右依次暗灭, 每次减少一个,直至全灭; DB 80H,40H,20H,10H,08H,04H,02H,01H;从左向右依次点亮,每次亮一个 DB 02H,04H,08H,10H,20H,40H,80H;从右向左依次点亮,每次亮一个 DB 0C0H,0E0H,0F0H,0F8H,0FCH,0FEH;从左向右依次点亮, 每次增加一个,直至全部点亮;
(2) 数据接收
串行口作为并行输入口使用时,要有“并入串出” 的移位寄存器配合。
74HC165 S/L 端为移位 / 置入端,当 S/L=0 时,从 Q0 ~ Q7并行置入数据,当S/L=1时,允许从QH端移出数据。在 80C51串行控制寄存器SCON中的REN=1时,TXD端发出移位 时钟脉冲,从RXD端串行输入8位数据。当接收到第8位数 据D7后,置位中断标志RI,表示一帧数据接收完成。
MCS51单片机期末考试题
单片机模拟试卷002一、填空题(每空格1分,共10分)1.MCS—51布尔处理机的存储空间是_______。
2.P2口通常用作_______,也可以作通用的I/O口使用。
3.若由程序设定RS1、RS0=01,则工作寄存器R0~R7的直接地址为______。
4.8051的堆栈区一般开辟在_______。
5.所谓寻址,其实质就是_______。
6.存储器映象是_______。
7.定时器中断请求发生在_______。
8.中断响应时间是指______。
9.通过CPU对I/O状态的测试,只有I/O已准备好时才能进行I/O传送,这种传送方式称为_______。
10.在中断服务程序中现场保护和现场恢复期间,中断系统应处在____状态。
二、单项选择题(在每小题的四个备选答案中,选出一个正确答案,并将正确答案的序号填在题干的括号内。
每小题1分,共10分)1.MCS-51单片机复位操作的主要功能是把PC初始化为( )。
A.0100HB.2080HC.0000HD.8000H2.若单片机的振荡频率为6MHz,设定时器工作在方式1需要定时1ms,则定时器初值应为( )。
A.500B.1000C.216-500D.216-10003.定时器1工作在计数方式时,其外加的计数脉冲信号应连接到( )引脚。
A.P3.2B.P3.3C.P3.4D.P3.54.当外部中断请求的信号方式为脉冲方式时,要求中断请求信号的高电平状态和低电平状态都应至少维持( )。
A.1个机器周期B.2个机器周期C.4个机器周期D.10个晶振周期5.MCS-51单片机在同一优先级的中断源同时申请中断时,CPU首先响应( )。
A.外部中断0B.外部中断1C.定时器0中断D.定时器1中断6.定时器若工作在循环定时或循环计数场合,应选用( )。
A.工作方式0B.工作方式1C.工作方式2D.工作方式37.MCS-51单片机的外部中断1的中断请求标志是( )。
A.ET1B.TF1C.IT1D.IE18.下列标号中,正确的标号是( )。
单片机UART串行接口
传送速率是指数据传送的速度。用b/s或bps(比特/秒)表示,称为比特率。在二进制的情况下,比特率与波特率数值相等,因而在单片机的串行通信中,常称为波特率。 假如数据传送的速率为120个字符每秒,每个字符由1个起始位、8个数据位和1个停止位组成,则其传送波特率为: 10b×120/s=1200b/s=1200波特 每一位的传送时间即为波特率的倒数:
SCON.4位 REN——允许串行接收位。
REN=1时,允许接收;REN=O时,禁止接收。由软件置位或清除。
1
2
SCON.3位 TB8——发送数据的第9位(D8)。
在方式2或方式3中,根据需要由软件置位或复位。双机通信时,它可约定作奇偶校验位;在多机通信中,可作为区别地址帧或数据帧的标识位。一般由指令设定地址帧时,设TB8为1;而设定数据帧时,设TB8为0。方式0和方式1中没用该位。
串行通信(serial communication):所传送数据的各位按顺序一位一位地发送或接收。
*
在并行通信中,一个并行数据占多少位二进制数,就要多少根传输线,这种方式的特点是通信速度快,但传输线多,价格较贵,适合近距离传输。
串行通信仅需1~2根传输线,故在长距离传输数据时比较经济,但由于它每次只能传送1位,所以传送速度较慢。
方式0中,每个机器周期发送或接收1位数据, 且不受SMOD的影响。 方式2的波特率取决于PCON中SMOD之值。 当SMOD=0时,波特率为fosc的1/64; 若SMOD=1,则波特率为fosc的1/32,即:
SCON.1位 TI——发送中断标志位。
在方式0中,接收完8位数据后,由硬件置位;在其他方式中,在接收停止位的中间,由硬件置位。RI=1时,可申请中断,也可供软件查询用。在任何方式中,都必须由软件清除RI。
基于VxWorks环境与仿真终端的串口通信设计

单片机串口通信实验报告

信息工程学院实验报告课程名称:单片机原理及接口实验项目名称:串口通信实验实验时间:2017.5一、实验目的:1.了解什么是串口,串口的作用等。
2、了解串口通信的相关概念3、利用keil软件,熟悉并掌握中串口通信的使用4、通过实验,熟悉串口通信程序的格式,串口通信的应用等二、实验原理1、串口通信概念:单片机应用与数据采集或工业控制时,往往作为前端机安装在工业现场,远离主机,现场数据采用串行通信方式发往主机进行处理,以降低通信成本,提高通信可靠性。
如下图所示。
2、串口数据通信方式及特点★数据通信方式有两种:并行通信与串行通信★并行通信:所传送数据的各位同时发送或接收,数据有多少位就需要多少根数据线。
特点:速度快,成本高,适合近距离传输如计算机并口,打印机,8255 。
★串行通信:所传送数据的各位按顺序一位一位地发送或接收。
只需一根数据,一根地线,共2 根特点:成本低,硬件方便,适合远距离通信,传输速度低。
串行通信与并行通信示意图如下:成绩:指导老师(签名):3、串行通信基本格式①单工通信:数据只能单向传送。
②半双工通信:通信是双向的,但每一时刻,数据流通的方向是单向的。
③全双工通信:允许数据同时在两个方向流动,即通信双方的数据发送和接收是同时进行的。
4、异步串行通信/同步串行通信①异步串行通信:异步串行通信采用如下的帧结构:起始位+ 8位数据位+ 停止位或起始位+ 9位数据位+ 停止位其中:起始位为低电平,停止位为高电平。
优点:硬件结构简单缺点:传输速度慢②同步串行通信:在同步通信中,发送方在数据或字符开始处就用同步字符(常约定1~2个字节)指示一帧的开始,由时钟来实现发送端和接收端同步,接收方一旦检测到与规定的同步字符符合,下面就连续按顺序传送若干个数据,最后发校验字节。
见下图:5、串行通信过程与UART基本的计算机异步串行通信系统中,两台计算机之间通过三根信号线TxD、RxD和GND连接起来,TxD与GND构成发送线路,RxD与GND构成接收线路。
嵌入式系统中扩展串行口的几种方法

为 000 时写命令字 引脚 MS 为 1 SP2338 唤醒 但由于 SP2338 的唤
STADD2 ̄STADD0 为 000 时读命令 醒时间需要 25ms 左右 故用于芯片
字 进行工作方式设置时 芯片的 唤醒的数据将不会被主机接收 因
帧格式和母串口工作波特率与上一 此 可以先发送一个字节数据用于
134 2006.7 电子设计应用
万方数据
嵌入式系统
讯 并且通讯过程完全由主机控制 的帧格式为11bit 母串口波特率为
的系统 多通道模式下 各子串口 7200bps
波特率相同 允许所有子串口同时
基于 SP2338 的串行口扩展
与母串口通讯 母串口以子串口波
S P 2 3 3 8 是采用低功耗 C M O S
参考文献 1. 刘毓梅等 通过异步串口扩 展芯片 GM8123/25 的原理和应用 成都国腾微电子公司 2004 2.李华艾编 Mcs-5系列单片机 实用接口技术 北京航空航天大学 出版社 2001
136
133 发出一个中断 调用中断例 程 利用掉电保护电路所维持的工 作时间保存当前打印位置 系统停 止工作 待重新上电后检测到 打 印未完成 标志 则读出最后一张 发票明细数据 从断电时记录的位 置继续打印出一张完整的发票 并 清除标志
相似文献(10条)
数据安全性处理 税控收款机集商务 税控 管 理等功能于一体 对数据的传输和 存储要求相当高 需要能够正确地 传输 存储 生成及反馈数据 因 此 对安全性的要求也相当高 本 系统的安全性设计从以下几个方面 来体现 系统中采取了用户权限分级管
理的方法 设置了三种具有不同操 作权限的角色 系统管理员 收款 员 税务稽查员 用户与角色关联 用户密码采用 6 位  ̄8 位数字 密码 以密文形式存储在Flash内 进入相 应的用户模式都要通过对应的密码 校验 才能够登录税控收款机 执 行本用户级的相应操作
基于LEON3的SoC平台构建及UART全双工通信验证

基于LEON3的SoC平台构建及UART全双工通信验证段大高;王平丽【摘要】LEON3是一个可配置、可移植、高性能和开源的软核处理器,在工业领域和空间应用中得到广泛研究.论文基于LEON3软核构建了一种高性能、灵活的SoC硬件平台,并设计了UART全双工通信功能.首先介绍了LEON3开发环境硬件平台的搭建,并通过tsim-leon3模拟器,验证了LEON3 SoC的基本功能;其次研究LEON3的UART通信功能,并在LEON3 SoC硬件平台上进行了UART全双工通信实现.结果验证了基于LEON3的SoC平台的可行性,并实现了SoC的UART全双工通信功能,为SoC的开发提供一个良好的参考方案.【期刊名称】《机电产品开发与创新》【年(卷),期】2014(027)003【总页数】3页(P115-117)【关键词】LEON3;UART;tsim-leon3;SoC【作者】段大高;王平丽【作者单位】北京工商大学,计算机与信息工程学院,北京100048;北京工商大学,计算机与信息工程学院,北京100048【正文语种】中文【中图分类】TP39随着芯片设计技术的飞速发展,SoC已成为集成电路设计界的焦点,SoC的性能要求越来越高,规模也越来越大。
LEON系列微处理器是欧洲航天局(ESA)下属研究机构 Gaisler Research公司所开发和维护的,LEON3处理器是基于SPARCV8架构的32位精简指令集计算机微处理器,目的是摆脱对美国航空局的依赖,LEON3是一个可配置的、可移植的、高性能的、高可靠的软核处理器[1]。
它的源码是可综合的VHDL代码,并且是开源的,任何人都可以在其网站上免费下载其硬件代码和各种开发软件工具与文档。
由于LEON3具有良好的可移植性、可配置性和遵循GPL许可协议的开源性,这些特性保证系统SoC芯片的安全性,提供良好的性能和灵活的解决方案[2],也决定了在LEON3上进行嵌入式操作系统移植的特殊性,所以很适合SoC平台开发[3~5]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/*由于mega16串口就一个在节省成本情况下应邀用普通IO口模拟串口通信,下面是128的实例程序,实现了全双工通信,不过占用两个定时器和一个外部中断资源,仅供考虑*//*作者:青檐铃风2012.5.13*/// Target : Mega128// Crystal: 8.0000Mhz#include<iom128v.h>#include<macros.h>#define U8 unsigned char#define bool unsigned char#define U16 unsigned int#define time1init TCNT1H=0XF9; TCNT1L=0X7D;//2400BIT/S 初值=0xFFFF-(1000000/baud/2)*8#define time3init TCNT3H=0XF9; TCNT3L=0X7D;//2400BIT/S/*++++++++++++++++++++++++++++++++++=宏定义=++++++++++++++++++++++++++++++++++++*/U8 vmRS232;// 记录模拟串口接收脚的高低电平// 脚定义#define GET_VM232_RX() (PIND &0x01) // 端口D的PD0模拟接收#define SET_VM232_TX() {PORTA|=BIT(0);} // 端口A的PA0发送#define CLR_VM232_TX() {PORTA&=~BIT(0);} // 端口A的PA0发送/*++++++++++++++++++++++=++++++++++++++++++++++++*/// 模拟串口的状态码enum {START,//接收起始位SDATA,//数据位STOP,//停止位标志U8 inRS232 = 0; // 模拟232的数据接收输入指针U8 outRS232 = 0; // 模拟232的数据接收取出指针U8 vmRS232Buf[20]={0}; // 模拟232的数据接收缓冲区U8 data=0;void delay(unsigned int x){unsigned int i,j;for(i=x;i>0;i--)for(j=0;j<330;j++);}void vm_rs232_rx(void) // 模拟232接收函数flag标志是否有接收到起始位{static U8 status = START;//静态变量每次进入时不会重新初始化static U8 cnt = 0;//三中取二的计数标志static U8 number = 0;//八位数据位标志static U8 rData;//读到的数据暂存地switch(status){case START:if(++cnt >=1){cnt = 0;number = 0;status = SDATA;}break;case SDA TA:if(++cnt >=2){cnt = 0;if((PIND&0x01)){rData |= 0x80;}else{rData &= 0x7F;}if(++number<8)//因为串口接收数据时从低位到高位的所以每次读出访在高位在一次右移一位{rData >>= 1;}if(number==8){number = 0;status = STOP;}}break;case STOP:if(++cnt>=1){cnt = 0;vmRS232Buf[inRS232++] =rData;//保存读到的数据if(inRS232==20)inRS232=0;PORTA|=BIT(1);status = START;//vmRS232=0;//取消读标志//TIMSK&=~BIT(2);//关定时器发送EIMSK=0x01; //开外部中断int_0,对应按键K20}break;default:cnt = 0;status = START;break;}}///////////////////////////////////////////发送函数/////////////////////////////bool flgVmRs232tx = 0; // 模拟232是否有数据要发送的标志,1有数据要发送,完成清零U8 vmRS232SBUF;// 模拟232要发送的一字节缓冲void vm_rs232_tx(void) // 模拟232发送函数{static U8 status = START;static U8 cnt = 0;static U8 number = 0;if(flgVmRs232tx){switch(status){case START:CLR_VM232_TX();if(++cnt >=2){cnt = 0;status = SDATA;}break;case SDA TA:if(vmRS232SBUF & 0x01){SET_VM232_TX();}else{CLR_VM232_TX();}if(++cnt >=2){cnt = 0;if(++number <=8){vmRS232SBUF >>= 1;}else{number = 0;status = STOP;}}break;case STOP:SET_VM232_TX();if(++cnt >=2){cnt = 0;status = START;flgVmRs232tx = 0;// ETIMSK&=~BIT(2);// 关中断//关了接收数据多了就会出错//EIMSK=0x01; //开外部中断int_0,对应按键K20}break;default:SET_VM232_TX();cnt = 0;status = START;flgVmRs232tx = 0;break;}}}// 波特率都是2400BIT/S ,416US/BIT// 3中取2 ,每208US抽样// 208US中断采样1个模拟串口void timer1_init(void){TCCR1B=0X01;//没分频2;//8M 8分频/// TCNT1H=0XFF;// TCNT1L=0X30;//38400BIT/S//30;2400BIT/Stime1initTIMSK|=BIT(2);// SREG|=BIT(7);}void timer3_init(void){TCCR3B=0X01;//没分频02;//8M 8分频/TCCR3A=0X00;//TCNT3H=0XFF;//TCNT3L=0X30;time3initETIMSK|=BIT(2);// SREG|=BIT(7);}/*+++++++++++++++++++++++++++++++++= MAIN =++++++++++++++++++++++++++++++++++++++*/void port_init(void){DDRA = 0x07;//PA0为输出口PORTA = 0x07;//PA0输出1DDRD = 0x00; //PD0输读入模拟rxdPORTD = 0x03;//PD0输入口上拉}void init_devices(void){//stop errant interrupts until set upCLI(); //disable all interruptsport_init();timer1_init();timer3_init();// MCUCR = 0x00;EICRA=0x00;//低电平触发成功2;//下降沿触发失败EIMSK=0x01; //开外部中断int_0,对应按键K20SEI();//re-enable interrupts//all peripherals are now initialized}void main(void){init_devices();// 收到什么就回发什么while(1){// while((PIND&0x02))while(flgVmRs232tx==1); //等待发送完再转载if(outRS232!=inRS232)//vmRS232SBUF!=data){vmRS232SBUF=vmRS232Buf[outRS232++];if(outRS232==20)outRS232=0;//TCNT3H=0XFF;//TCNT3L=0X30;time3init// data=vmRS232Buf[0];flgVmRs232tx=1;//ETIMSK|=BIT(2);//发送关了会不能及时接收数据长了会漏接}// }}}////////////////////////////////////////#pragma interrupt_handler ext_int0_isr:2 //指定外部中断函数void ext_int0_isr(void){// TCNT1H=0XFF;// TCNT1L=0X30;time1init//TIMSK&=~BIT(2);//TIMSK|=BIT(2);PORTA&=~BIT(1);vmRS232=1;//TIMSK|=BIT(2);EIMSK=0x00;//关外部中断int_0,对应按键K20}////////////////////////////////#pragma interrupt_handler time1_isr:15 //定时器1溢出void time1_isr(void){//TCNT1H=0XFF;// TCNT1L=0X30;time1init// 在这采样接收脚保证不漂移if(vmRS232)//判断是否需要读{vm_rs232_rx();}/* if(flgVmRs232tx){vm_rs232_tx();} */}#pragma interrupt_handler time3_isr:30//定时器3溢出void time3_isr(void){// TCNT3H=0XFF;// TCNT3L=0X30;time3init// 在这采样接收脚保证不漂移if(flgVmRs232tx){vm_rs232_tx();}}/*++++++++++++++++++++++++++++++++++=end=++++++++++++++++++++++++++++++ ++++++++++*/。