感应电动机负荷模型参数解析灵敏度分析及参数辨识策略研究
考虑频率特性的感应电动机负荷模型的对比研究

考虑频率特性的感应电动机负荷模型的对比研究梁伟;鞠平;余一平【摘要】Previous studies mostly focused the voltage characteristics of load rather than the frequency characteristics. The frequency may vary obviously in the small or weak power grid, so the frequency characteristics should be studied. The fifth-order induction motor load model and the new third-order practical induction motor load model are given. A method for load parameter estimation is proposed, i.e. estimating the key load parameters through ant colony optimization (ACO). In a simulation case, the identification results of two load models are compared with and without considering frequency characteristics. Finally, the measured data under a disturbance in Xinjiang Power Grid are used to validate the necessity of considering frequency characteristics. It is indicated that the load parameter estimation and simulation results with considering frequency characteristics are better than that without considering frequency characteristics, and the fifth-order induction motor load model is better than the new third-order practical induction motor load model. <br> This work is supported by National Natural Science Foundation of China (No. 51137002 and No. 51190102), National High Technology Research and Development Program of China (863 Program) (No.2011AA05A103), and State Grid Corporation of China, Major Projects on Planning and Operation Control of Large Scale Grid (No. SGCC-MPLG001 (001-031)-2012).%以往主要研究负荷的电压特性,很少研究频率特性。
《感应电机数学模型分析1900字》
感应电机数学模型分析综述感应电机由于具有复杂数学关系,在分析和求解上比较困难的复杂。
在研究三相交流感应电机的交流调速系统时,需要对其特性进行分析,而数学模型是对一个系统进行研究的理论基础。
在三相静止坐标系中,感应电机的矩阵维数有六维,同时还存在电流耦合。
而在两相静止坐标系下,矩阵维数就会降阶到四维,显然在难度上有所降低,此时还存在电流耦合。
如果再变换到两相旋转坐标系中,耦合的电流量就被解耦成方便独立控制的直流量,因此在两相旋转坐标系下对励磁电流和转矩电流进行控制和处理就完成了矢量控制。
在研究感应电机的非线性数学模型时,为了方便分析问题,通常情况下要求:(1)忽略空间谐波,设三相绕组对称,空间中互差120°电角度,其产生的磁动势按照正弦规律沿气隙周围分布;(2)忽略磁路炮和,电机中各个绕组的自感以和互感保持恒定,都不受磁路饱和程度影响;(3)不考虑涡流损耗和铁心损耗的作用;(4)忽略绕组电阻受其他因素的影响。
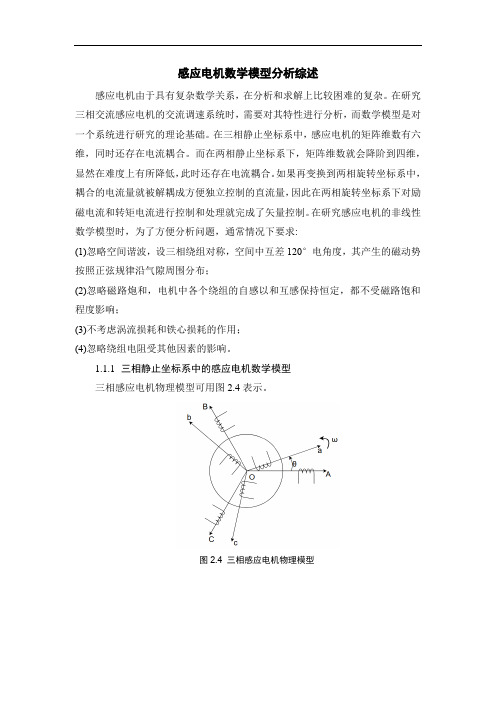
1.1.1三相静止坐标系中的感应电机数学模型三相感应电机物理模型可用图2.4表示。
图2.4 三相感应电机物理模型(1)电压方程[u Au Bu Cu au bu c]=[R s000000 R s000000 R s000000 R r000000 R r000000 R r][i Ai Bi Ci ai bi c]+p[ψAψBψCψaψbψc](1-8)其中,u A、u B、u C、是定子相电压;u a、u b、u c是转子相电压; R s是定子电阻, R r是折算到定子侧的转子电阻;i A、i B、i C、i a、i b、i c是电机定子绕组和转子绕组的各相电流。
p=d/dt,为微分算子。
(2)磁链方程[ψAψBψCψaψbψc]=[L AA L AB L AC L Aa L Ab L AcL BA L BB L BC L Ba L Bb L BcL CA L CB L CC L Ca L Cb L CcL aA L aB L aC L aa L ab L acL bA L bB L bC L ba L bb L bcL cA L cB L cC L ca L cb L cc][i Ai Bi Ci ai bi c](1-9)其中,ψA、ψB、ψC、ψa、ψb、ψc是定子绕组和转子绕组的磁链, L AA、 L BB、 L CC、 L aa、 L bb、 L cc是定转子绕组自感, L xy{x,y=A,B,C,a,b,c;x≠y}是绕组之间互感。
基于轨迹灵敏度的负荷参数辨识范围调整方法
基于轨迹灵敏度的负荷参数辨识范围调整方法贺仁睦1,郑晓雨1,马 进1,唐永红2(1.华北电力大学电力系统保护与动态安全监控教育部重点实验室,北京市102206;2.四川电力试验研究院,四川省成都市610072)摘要:实践表明,参数辨识范围的选取对参数的辨识效果影响很大。
在分析负荷模型参数对所吸收功率的轨迹灵敏度的基础上,提出了负荷模型参数辨识范围的调整方法。
首先根据动态过程中轨迹灵敏度的大小选择要调整的参数对象,然后进一步依据动态轨迹灵敏度的变化特点调整参数的辨识范围,从而达到提高负荷辨识精度的目的。
实际例子充分表明了这种方法的有效性。
关键词:负荷建模;模型结构;参数辨识;参数范围调整;轨迹灵敏度中图分类号:TM714收稿日期:2008211224;修回日期:2009203227。
国家自然科学基金资助项目(50707009,50595410);教育部博士学位青年教师基金资助项目(20070079014);北京市科技新星计划;国家重点基础研究发展计划(973计划)资助项目(2004CB217901);“111”引智计划(B08013)。
0 引言在现代电力系统中,仿真已经成为电力运行、规划、设计必不可少的工具,而负荷模型作为仿真模型之一也越来越受到重视[125]。
在目前的建模方法中,总体测辨法[6210]由于自身的优点而被广泛采用,此方法在确定了模型结构之后下一步就是对模型中的参数进行辨识。
目前的辨识方法很多,比如遗传算法、粒子群算法等[11212]。
无论哪种算法其本质都是在给定的参数区间上寻优的过程,目前大多数研究都集中在参数辨识方法的改进上,而对参数寻优范围的研究却很少提及。
目前,经常用的方法是按照参数的典型值放大和缩小相同的比例得到参数的上下限[13],但是往往有些时候辨识效果不理想,除了模型结构和辨识算法的影响,造成这个现象的很重要的原因是参数范围选取得不恰当,因为负荷模型中的感应电动机是一个等值感应电动机,用它来表征实际负荷中千千万万个容量、特性不同的感应电动机的总的动态特性,由于不同地点的负荷特性差异也很大,因此它的参数辨识范围不能再统一由某一典型参数放大和缩小一定比例得到,在对不同地点的数据进行辨识时应该根据具体数据的情况做适当的调整,只有找到了合适的参数辨识区间,模型结构和辨识算法才能发挥真正的效力。
感应电动机参数离线辨识方法实验研究_王高林
中图分类号:T M346 文献标志码:A 文章编号:100126848(2009)0620004204感应电动机参数离线辨识方法实验研究王高林,商 振,于 泳,徐殿国(哈尔滨工业大学,哈尔滨 150001)摘 要:为进一步提高感应电机矢量调速系统的性能,介绍了一种改进的参数离线辨识方案。
系统通过自动进行直流实验、单相交流实验和空载实验来辨识感应电机的参数。
所提出的改进方案可以有效消除集肤效应和死区效应所产生的辨识误差。
对方案进行了详细分析,介绍了具体实现过程;最后将这种参数辨识方法应用到11k W 感应电机矢量控制系统。
实验结果验证了方案的有效性。
关键词:参数辨识;离线;感应电动机;集肤效应;死区效应;实验Research on O ff 2li n e Param eter I den ti f i ca ti on for I nducti on M otorWANG Gao 2lin,SHANG Zhen,Y U Yong,XU D ian 2guo (Harbin I nstitute of Technol ogy,Harbin 150001,China )Abstract:Pr oposed an i m p r oved inducti on mot or off 2line para meter identificati on sche me f or vect or con 2tr olled AC mot or drives .The inverter drives aut omatically perf or med the DC test,the single 2phase test,and the no 2l oad test t o calculate all the machine para meters during self 2comm issi oning peri od .The p r o 2posed sche me can eli m inate the para meter identificati on err or due t o the skin and dead 2ti m e effects .I n 2tr oduced the scheme p rinci p le and the i m p le ment method in detail .Experi m ental results de monstratedthe feasibility of the para meter identificati on method in 11k W vect or contr olled inducti on mot or drive sys 2te m.Key W ords:Para meter identificati on;Off 2line;I nducti on mot or;Skin effect;Dead 2ti m e effect;Ex 2peri m ent收稿日期:20082092170 引 言在感应电机矢量控制系统中,电机参数的准确性影响到磁链估计以及控制参数调节等重要环节,因此电机参数辨识对于高性能调速系统具有重要的意义[1]。
电机参数识别及动态控制方法研究
电机参数识别及动态控制方法研究1. 电机参数识别方法电机参数的准确识别对于电机控制至关重要。
下面介绍几种常用的电机参数识别方法:1.1 磁链反馈法:通过测量电机的转矩和转速,结合电机的数学模型,利用闭环控制系统中电流和磁链之间的关系,识别电机的参数。
1.2 基于模型参考自适应控制(MRAC):此方法通过测量电机的输出信号和控制输入信号,利用自适应控制策略来逐步调整参数,使得模型输出与实际系统输出一致,从而识别电机的参数。
1.3 神经网络方法:通过构建适当的神经网络模型,将电机的输入和输出信号作为训练样本,通过训练网络来输出电机的参数。
以上是一些主流的电机参数识别方法,具体选择适用的方法需要根据电机的具体特点和实际应用场景来决定。
2. 动态控制方法电机的动态控制是指根据特定的控制策略,对电机的转速、转矩、位置等进行实时调节。
下面介绍几种常用的动态控制方法:2.1 比例积分控制(PI控制):此方法通过测量电机的转速或位置与给定的目标值之间的差异,根据比例和积分的思想,调整控制输入信号,以实现动态控制。
2.2 模型预测控制(MPC):MPC方法建立电机的数学模型,通过预测电机未来的状态和输出,并考虑控制目标和约束条件,制定最优的控制策略。
2.3 自适应控制:自适应控制方法根据系统的动态特性,自动调整控制器的参数,以适应不同工况下的控制要求,从而实现更精确的动态控制。
以上是一些常用的动态控制方法,具体选择方法需要根据电机的应用要求和性能指标来决定。
3. 电机参数识别与动态控制方法结合将电机参数识别方法与动态控制方法结合,可以实现更精确的电机控制效果。
首先,利用电机参数识别方法准确识别出电机的参数,包括电阻、电感、转动惯量等。
这些参数是电机控制的基础,准确识别可以提高控制系统的稳定性和性能。
然后,根据识别出的电机参数,结合选择的动态控制方法,制定相应的控制策略。
根据控制策略,对电机的控制输入进行调整,使得电机的输出满足所需的控制要求,比如稳定性、精度、响应时间等。
基于感应电动机的负荷模型参数辨识研究
基于感应电动机的负荷模型参数辨识研究xx学院毕业设计(论文)开题报告题目:基于感应电动机的负荷模型参数辨识研究课题类别:设计学生姓名:学号:班级:专业(全称):指导教师:2010年 4月一、本课题设计(研究)的目的:(1)了解电力系统负荷建模重要性的基础上,掌握电力负荷模型的基本概念及分类,重点掌握静态负荷模型、动态负荷模型并建立综合负荷的概念。
(2)了解电力系统负荷建模的方法及研究现状的基础上,重点研究动态负荷模型中的感应电动机模型。
(3)掌握感应电动机模型的结构特点及待辨识参数的物理意义。
(4)理解感应电动机负荷模型参数辨识实现过程,通过感应电动机的三种综合负荷模型对样本进行参数辨识,以比较和分析这三种模型对实际综合负荷的描述效果。
二、设计(研究)现状和发展趋势(文献综述):随着我国主要电网互联进程的推进,电网的复杂程度愈来愈高,其动态稳定性及电压稳定性问题愈来愈突出,负荷模型对系统计算结果的影响已变得不容忽视。
在东北—华北交流联网系统稳定性分析和东北—华北联网工程调试等工程项目的研究中,采用的负荷模型和参数严重地影响了系统稳定性计算结果的可信度,给决策方案的取舍带来了一定困难。
为了解决这一问题,必须探索适用于我国现阶段大规模互联电网的负荷模型和建模方法。
由于电力系统数字仿真已被广泛应用于电力系统的规划、设计、运行和研究等领域,数字仿真结果常常被作为相关决策的依据,因此仿真的准确度愈来愈受到重视。
随着研究的深入,最后将负荷模型从恒电流模型改成电动机加上某种静态负荷的模型后,仿真结果才与现场记录相一致,这充分说明目前用于电力系统动态仿真模型或参数改进而建立和使用基于实测数据的负荷模型具有十分重要的现实意义。
目前,负荷建模方法可归纳为两类,即统计综合法和总体测辨法。
在过去的 20 年中,对于采用上述两种方法进行负荷建模的研究已取得了许多成果。
由于电网运行水平越来越接近于极限以及大量电力电子设备的涌现,导致了20世纪70—80年代建立的负荷模型已不适用于电力系统动态仿真。
感应电动机稳态模型参数识别系统硬件设计的开题报告

感应电动机稳态模型参数识别系统硬件设计的开题报告一、选题的背景感应电动机是一种常用的电机类型,在各种电力驱动系统中应用广泛。
为了保证感应电动机的工作性能和精度,需要对其进行稳态模型参数的识别,以便实现精确的控制和优化。
因此,设计一款感应电动机稳态模型参数识别的系统具有重要的意义。
二、选题的目的与意义本项目的主要目的是设计一款稳态模型参数识别的系统,实现对感应电动机的精确控制和优化。
通过该系统,可以实现参数的实时监测、控制和优化,提高感应电动机的工作性能、减少功耗和降低成本,具有重要的实际意义。
三、设计方案概述本项目采用计算机辅助控制技术,设计了一款感应电动机稳态模型参数识别的系统。
系统的核心部分是一个控制器,它可以实时监测感应电动机的状态变化,并根据变化情况自动调整控制参数,以实现精确的控制和优化。
系统的硬件部分包括感应电动机、传感器、控制器和电源部分。
其中,传感器用于监测感应电动机的状态变化,控制器则根据监测结果进行调节。
电源部分提供系统所需的电力。
四、预期成果通过本项目,预期达到以下几点成果:1.设计并实现了一款感应电动机稳态模型参数识别的系统。
2.实现了感应电动机的实时监测、控制和优化。
3.提高感应电动机的工作性能、减少功耗和降低成本。
五、项目实施计划本项目计划在一年内完成,并按以下步骤实施:1.项目启动和立项:1月份完成。
2.需求分析和系统设计:2-3月份完成。
3.硬件设计和制作:4-6月份完成。
4.软件开发和调试:7-9月份完成。
5.系统测试和优化:10-11月份完成。
6.成果汇报和交付:12月份完成。
六、项目的风险管理本项目涉及机电、电子和软件等多个领域,具有一定的技术难度和风险。
为了降低风险,需要采取以下措施:1.制定详细的计划和进度表,及时跟踪项目进展情况。
2.建立有效的沟通机制,保证项目组成员之间的协作和配合。
3.加强技术研究和培训,提高团队成员的技术水平。
4.加强风险评估和预警,及时应对和处理突发事件。
《2024年永磁同步电机的参数辨识及控制策略研究》范文

《永磁同步电机的参数辨识及控制策略研究》篇一一、引言随着电力电子技术的飞速发展,永磁同步电机(PMSM)作为高效、节能的电机驱动系统,在工业、交通、航空航天等领域得到了广泛应用。
然而,永磁同步电机的性能和效率受到其参数辨识和控制策略的深刻影响。
因此,对永磁同步电机的参数辨识及控制策略进行研究,对于提高电机性能、优化系统运行具有重要意义。
二、永磁同步电机参数辨识1. 参数辨识的重要性永磁同步电机的性能和运行状态受到其参数的影响,如电感、电阻、永磁体磁链等。
准确的参数辨识对于电机的控制、优化设计以及故障诊断具有重要意义。
2. 参数辨识方法(1)传统方法:通过电机设计参数和实验测试获得,但受环境、温度等因素影响较大。
(2)现代方法:利用现代信号处理技术和智能算法,如最小二乘法、卡尔曼滤波器、神经网络等,对电机运行过程中的数据进行实时辨识和更新。
3. 参数辨识的挑战与解决方案在参数辨识过程中,如何提高辨识精度、降低辨识误差、适应不同工况是主要挑战。
针对这些问题,可以通过优化算法、提高采样精度、引入多源信息融合等方法进行解决。
三、永磁同步电机的控制策略研究1. 控制策略的种类与特点永磁同步电机的控制策略主要包括矢量控制、直接转矩控制、模型预测控制等。
矢量控制具有高精度、高动态响应的特点;直接转矩控制具有转矩响应快、控制简单的优点;模型预测控制则具有较好的鲁棒性和适应性。
2. 控制策略的优化与改进针对不同应用场景和需求,可以对控制策略进行优化和改进。
例如,通过引入智能算法,如模糊控制、神经网络控制等,提高电机的自适应性和鲁棒性;通过优化算法参数,提高电机的能效和运行效率。
3. 控制策略的挑战与未来方向在控制策略研究中,如何提高系统的稳定性和可靠性、降低能耗是主要挑战。
未来研究方向包括:深度学习在永磁同步电机控制中的应用、多源信息融合在电机控制中的研究等。
四、实验与分析通过搭建永磁同步电机实验平台,对上述参数辨识及控制策略进行研究与验证。
三相感应电机的参数辨识和应用
三相感应电机的参数辨识和应用凌 毅,周熙文(三科电器集团有限公司杭州分公司,杭州 310011)Email :******************摘 要 在矢量控制系统中,电机参数的准确性直接影响电机控制的性能,本文介绍了电机参数辨识的方法以及在DSP 平台上的具体实现。
关键词 感应电机,矢量控制,参数辨识1.引言在现代交流感应电机变频调速中,矢量控制被认为是一种理想、技术较为成熟的控制方法,它实现了对电机的励磁电流和电枢电流的解耦,能够按照直流电机控制规律来控制。
在感应电机矢量控制系统中,电机参数的准确性影响到磁链估计以及控制参数调节等重要环节, 如果控制系统采用的参数同电机实际参数不匹配,将严重影响系统的性能,甚至导致电机无法正常运行,因此电机参数辨识对于高性能调速系统具有重要的意义。
对于高性能感应电机矢量控制型变频器,产品要求具有参数离线自学习的功能,需要在电机运行之前对参数进行离线辨识。
离线辨识获得的电机参数将有助于矢量控制调速系统的正常运行,同时也可以对参数在线辨识的收敛性起参考作用。
实际应用中,通常需要辨识的电机等效电路参数包括定、转子电阻和漏感以及互感等参数。
2.辨识方法交流感应电机的参数辨识分为在线辨识和离线辨识。
在线辨识主要是利用在线自适应的控制方法,设计较复杂的算法跟踪电机参数的变化,对电机的参数进行校准,保证系统的控制性能。
如果对所有的参数都进行在线跟踪,会对系统资源造成很大的压力,导致系统的控制性能下降。
因此,在线辨识电机参数只要对变化较大和敏感程度高的参数进行在线辨识。
离线辨识主要是在电机运行之前,变频器自动执行一套辨识电机参数的程序,对电机施加特定波形的激励,检测电机对激励的响应,通过对返回的数据进行计算以获得电机的参数。
2.1 异步电机等效模型假设定、转子绕组都为星形联接,电源电压三相对称,由此我们可以得到定子电压方程为:11111...()R jX U I E σ=+- (1) 其中1.U 表示定子每相所加电压,1.E 表示三相电动势,1R 和1X σ表示定子每相的电阻和漏抗。
感应电动机负荷模型参数辨识

研究现状和发展趋势
现有的负荷模型辨识方法主要包括直接测量法、传递函数法和神经网络法等。
直接测量法虽然简单但精度较低,传递函数法对模型参数的准确性要求较高,神经 网络法能够自适应地辨识模型参数但训练时间较长。
随着人工智能和机器学习技术的发展,新型的辨识方法如深度学习、强化学习等逐 渐应用于感应电动机负荷模型的辨识。
4. 根据比较结果运用优化算法对模型 参数进行进一步调整;
3. 根据初步估计的参数对模型进行仿 真,并将仿真结果与实验数据进行比 较;
5. 重复步骤3和4,直到模型预测值与 实际测量值之间的误差满足要求。
03
基于遗传算法的负荷模型参数辨 识
遗传算法的基本原理和实现过程
遗传算法是一种基于生物进化 原理的优化算法,通过模拟生 物进化的过程,在解空间内搜 索最优解。
4. 模型训练完成后,使用训练好的模型对感应电动机的负荷 模型参数进行辨识;
2. 利用支持向量机回归算法构建模型,将负荷数据分为训练集和 测试集;
5. 最后,对辨识结果进行实验验证与分析。
实验验证与分析
ห้องสมุดไป่ตู้
为了验证基于支持向量机回 归的负荷模型参数辨识算法 的有效性和优越性,我们进 行了一系列实验。
实验中,我们收集了多组感 应电动机的负荷数据,包括 电流、电压、转速等,并对 数据进行了预处理。
然后,我们使用支持向量机 回归算法构建了负荷模型, 并使用训练集对模型进行了 训练和测试。
最后,我们对辨识结果进行 了分析和比较,发现基于支 持向量机回归的负荷模型参 数辨识算法具有较高的准确 率和泛化能力。
06
总结与展望
综合负荷模型设计与参数辨识开题报告
班级:自91姓名:辛明原指导老师:曹军威张树卿2013年6月14日主要内容项目背景实验平台与模型设计综合辨识算法及实验后续工作项目背景精度高低负传发时变性分散性潮流计算电压稳定计算小信号动态稳定计算项目背景统计综合法总体测辨法将用电设备统计、分类、综合得出负荷模型测量电网的变化量,辨识负荷模型参数简单实用项目背景总体测辨法希望电网的扰动越大越好,但这与实际情况不相符,现实中电网出现大的扰动概率很低,相比之下,在电网中稳定运行状态附近的小扰动始终持续存在,能够获得大量的小扰动准稳态或动态量测。
希望利用这些小扰动数据,分析提取得到综合负荷模型的一个重要参数Pct,即动负荷与各种静负荷所占的比例。
动态量测准稳态量测决策制定量测节点信息预处理负荷结构综合分析量测节点信息预处理负荷主导动态参数辨识系统行为预测决策下达信息传输本地处理主要内容项目背景实验平台与模型设计综合辨识算法及实验后续工作实验平台——PSCAD/EMTDC扰动生成部分ZIP+M 综合负荷模型模型设计恒功率恒电流感应电动机恒阻抗各种负荷有功输出波形恒电流感应电动机已知静负荷有功代数方程推测感应电动机200()()t tP P Pt U U P A B C U U =++静0()nt t P t U P M U +∆=感模型验证代数方程与仿真测量的对比2345678910.210.2510.310.3510.410.4510.510.5510.610.65234567891.881.91.921.941.961.9822.02恒电流负荷恒阻抗负荷20()t P U A U 0()t P U B U模型验证代数方程与仿真测量的对比 t0=0.1735s234567890.980.9850.990.99511.0051.011.0151.021.0251234567890.980.9850.990.99511.0051.011.0151.021.025t0电压与感应电动机波形对比加入时移后的对比00()nt t P U M U模型验证代数方程与仿真测量的对比 n=0.72234567898.558.68.658.78.758.88.85感应电动机负荷模型验证系数最大误差平均误差总长ap/bp/mpZ 1.9650.0080.00414001 I10.4530.01730.00814001 M8.7450.01230.00513390模型验证在模型验证的同时,对小扰动下负荷有功特性进行了探究,发现以下规律:静负荷的改变对感应电动机的影响很小,基本可以忽略。
电机参数辨识方法的研究及应用

电机参数辨识方法的研究及应用电机参数辨识是电机研究中的一个重要课题,准确地辨识电机参数可以为电机的控制与运行提供重要的信息和依据。
本文将对电机参数辨识方法的研究及应用进行探讨。
一、电机参数辨识方法的研究1. 传统电机参数辨识方法传统的电机参数辨识方法主要基于数学模型的理论推导和实验拟合。
其中,基于数学模型的方法通过建立电机的动态方程,利用模型参数与实际参数之间的关系进行参数辨识。
这种方法的优点在于理论依据确切,可靠性高,但需要准确的数学模型和实验数据。
2. 基于信号处理的电机参数辨识方法近年来,基于信号处理的电机参数辨识方法逐渐成为研究热点。
这种方法通过对电机输入输出信号进行分析和处理,提取其中的特征信息,并与电机参数进行关联,从而实现参数的辨识。
常用的信号处理方法包括小波分析、功率谱分析、自相关分析等。
3. 基于人工智能的电机参数辨识方法人工智能技术在电机参数辨识中的应用也受到越来越多的关注。
例如,神经网络和遗传算法等人工智能方法可以通过学习和优化的方式实现电机参数的辨识。
这种方法的优点在于可以从大量的数据中学习和挖掘电机参数之间的关系,但需要充足的训练数据和计算资源。
二、电机参数辨识方法的应用1. 电机控制系统优化通过准确辨识电机参数,可以提高电机控制系统的性能和稳定性。
在控制系统设计中,准确的电机参数可以用于建立精确的控制模型,并优化控制算法参数,从而提高电机的响应速度、稳定性和能效。
2. 故障诊断与预测电机参数辨识方法可以用于故障诊断与预测。
通过监测电机的输入输出信号,并使用参数辨识方法分析电机参数的变化,可以判断电机是否存在异常或潜在故障,并进行预测和预防性维护。
这对提高电机的可靠性和延长使用寿命非常重要。
3. 电机系统仿真与设计准确的电机参数是进行电机系统仿真和设计的基础。
通过辨识电机参数,可以建立精确的电机模型,并进行仿真分析和系统评估。
这对于新型电机的设计、性能预测和优化具有重要意义。
感应电动机负荷模型参数辨识研究进展与展望

感应电动机负荷模型参数辨识研究进展与展望感应电动机作为电力负荷的重要组成部分,其负荷模型参数已成为制约系统电压稳定性计算结果准确性的关键因素。
针对此,首先对国内外在感应电动机负荷模型参数辨识方面的主要研究成果进行了综述。
最后,指出今后感应电动机负荷模型参数辨识的研究方向,为我国电力系统感应电动机模型参数辨识的研究提供参考。
标签:感应电动机;负荷模型;参数辨识0 引言在电力系统稳定性分析中使用不同的负荷模型参数对计算结果的影响很大,该问题已受到了国外电力系统研究机构和运行部门的广泛关注。
在电力系统负荷中,对系统稳定特性影响较大的是电动机负荷。
据统计,在电力系统负荷中超过70%都是感应电动机负荷[1-2],系统发生故障后数秒内的负荷动态特性主要来源于感应电动机负荷的综合响应特性[3]。
因此,确定感应电动机负荷模型参数是电力系统负荷建模和稳定仿真计算所必需的。
通常所采用的电动机模型参数直接参照文献[4,5]推荐的几种典型参数,距今已有20 多年,将这些典型模型参数应用于当前电网的仿真分析,其适应性和准确性会受到限制。
基于此,人们在文献[4,5]的基础上,探索出多种感应电动机负荷模型参数辨识的方法,如:试验法、解析法、时域仿真法、铭牌数据估计法。
下面对这些方法进行评述。
1 试验法试验法确定感应电动机的参数主要通过空载试验和堵转试验来确定[6]。
空载试验的目的是确定感应电动机的激磁参数Rm、Xm,以及铁耗PFe和机械损耗PΩ。
试验是在电源频率f=fn、转子轴上不带任何负载,转速n≈ns的情况下进行的。
用调压器调节试验电压的大小,使定子三相的端电压(线电压)从(1.1~1.2)Usn逐步下降到0.3Usn,且转子转速没有明显下降时为止,每次记录感应电动机的相电压、空载电流和空载功率,然后利用测量的数据计算Rm和Xm。
堵转试验的目的是确定感应电动机的漏阻抗,试验在转子堵转的情况下(滑差s=1)进行。
调节试验电压,使端电压近似等于0.4Usn,然后逐步降低电压,每次记录定子的相电压、定子电流和功率;然后利用测量的数据计算定子参数Rs、Xs和转子参数Rr、Xr。
感应电机参数辨识三种智能算法的比较

感应电机参数辨识三种智能算法的比较
陈振锋;钟彦儒;李洁
【期刊名称】《电机与控制学报》
【年(卷),期】2010(014)011
【摘要】针对感应电机参数辨识,采用3种智能优化算法,即遗传算法、蚁群算法、微粒群算法.感应电机的实际输出电流和电气模型的观测电流之间的差值被作为目标函数不断对电气模型中的参数进行更新,从而辨识全部的感应电机参数.变速运行实验是在电机不带负载的情况下进行的.通过实验,对感应电机参数辨识3种智能优化算法进行比较,并得出结论.遗传算法可以得到最准确的电机参数,微粒群算法次之,蚁群算法最差.蚁群算法所需时间最短,遗传算法次之,微粒群算法最长.
【总页数】6页(P7-12)
【作者】陈振锋;钟彦儒;李洁
【作者单位】西安理工大学,自动化与信息工程学院,陕西,西安,710048;西安理工大学,自动化与信息工程学院,陕西,西安,710048;西安理工大学,自动化与信息工程学院,陕西,西安,710048
【正文语种】中文
【中图分类】TU313
【相关文献】
1.发电机励磁系统参数辨识三种智能算法的比较 [J], 舒辉;陈芳
2.无速度传感器控制系统中感应电机参数离线辨识 [J], 王凯东;李宏浩
3.基于电流测量误差补偿的感应电机参数辨识 [J], 侯文宝;李德路;张刚
4.考虑铁耗电阻的感应电机参数在线辨识技术 [J], 李耀宇; 高强
5.发电机励磁系统参数辨识三种智能算法的比较 [J], 舒辉陈芳
因版权原因,仅展示原文概要,查看原文内容请购买。
电动机设计参数灵敏度分析及影响因素研究

电动机设计参数灵敏度分析及影响因素研究电动机的设计参数对其性能具有至关重要的影响,因此对电动机设计参数的灵敏度进行分析和研究已经成为一个重要的研究领域。
通过对电动机设计参数的灵敏度进行深入分析,可以帮助工程师更好地设计出性能优越的电动机产品。
本文将通过研究电动机设计参数的灵敏度,并探讨其影响因素,以期为相关领域的研究和实践提供有益的参考。
一、电动机设计参数的灵敏度分析电动机的设计参数包括许多方面,如电磁设计参数、结构设计参数、控制参数等。
这些设计参数的选择和调整直接影响着电动机的性能表现。
在实际工程设计中,需要对这些设计参数的灵敏度进行分析,以确定哪些参数对电动机性能的影响最为显著。
通过灵敏度分析,工程师可以有针对性地调整设计参数,从而实现电动机性能的优化。
例如,在电动机的电磁设计中,转子磁链饱和、定子齿槽形状等设计参数的调整都会对电动机的性能产生较大影响。
在实际应用中,电动机的设计参数往往涉及到多个方面,各个设计参数之间存在着复杂的相互关系。
因此,对于电动机设计参数的灵敏度分析需要综合考虑多种因素,并采用适当的数学模型进行建模和分析。
通过对设计参数的灵敏度进行深入研究,可以揭示出设计参数之间的相互影响关系,为工程师提供更为准确的指导。
二、影响电动机设计参数灵敏度的因素研究电动机设计参数的灵敏度受到许多因素的影响,这些因素可以分为内部因素和外部因素两大类。
内部因素主要包括电动机结构、材料、磁路设计等方面,而外部因素则包括工作环境、负载要求、控制系统等因素。
在进行电动机设计参数的灵敏度分析时,需要全面考虑这些因素的影响,才能更为准确地评估设计参数的灵敏性。
1. 电动机结构设计因素电动机的结构设计是影响其性能的重要因素之一。
不同的结构设计参数,如转子槽型、绕组分布、铁芯形状等,都会对电动机性能产生不同程度的影响。
在进行电动机结构设计时,需要充分考虑各个设计参数之间的相互作用关系,以确保电动机性能的优化。
感应电动机负荷机电暂态模型的解析解法研究 -回复
感应电动机负荷机电暂态模型的解析解法研究-回复【感应电动机负荷机电暂态模型的解析解法研究】一、引言感应电动机作为现代工业中常见的驱动设备,其运行状态对生产过程起着至关重要的作用。
然而,由于负荷的突变以及电力系统的故障等原因,感应电动机可能会出现机电暂态的情况。
因此,针对感应电动机机电暂态的模型求解方法的研究具有重要的意义。
本文将以感应电动机负荷机电暂态模型的解析解法为主题,系统地介绍其中的步骤和方法。
二、感应电动机负荷机电暂态模型的建立感应电动机的机电暂态模型主要包括电路方程和动态方程。
其中,电路方程是基于电路的物理特性建立的,而动态方程则是基于电动机的运动学和动力学特性建立的。
1. 电路方程感应电动机的电路方程可以由双闭环的等效电路模型得到。
该模型包括定子电路和转子电路。
定子电路包含电源电压、电阻和漏感等元件,转子电路包含转子电阻、转子电压和漏感等元件。
通过对感应电动机的定子电流和转子电流进行分析,可以得到感应电动机的电路方程。
2. 动态方程感应电动机的动态方程描述了电动机转子转动响应的过程。
其中,转子转动过程由转动运动方程描述,包括动力学方程和速度方程。
定子电流方程描述了定子电流随时间的变化规律。
通过求解动态方程,可以得到感应电动机的负荷机电暂态模型。
三、感应电动机负荷机电暂态模型的解析解方法求解感应电动机负荷机电暂态模型的解析解方法主要包括复变函数法、拉普拉斯变换法和矩阵运算法。
1. 复变函数法复变函数法是一种常用的解析解方法,通过引入复变函数,将原方程转化为复平面上的函数,并利用复解析函数的性质进行求解。
该方法主要适用于感应电动机的线性模型,求解过程中需考虑各种边界条件。
2. 拉普拉斯变换法拉普拉斯变换法是一种常用的解析解方法,通过将原方程进行拉普拉斯变换,将微分方程转化为代数方程。
感应电动机的负荷机电暂态模型可以看作由线性微分方程组成,通过拉普拉斯变换,可以将求解过程转化为代数方程的求解过程。
单相感应电动机的性能参数和评价指标
单相感应电动机的性能参数和评价指标单相感应电动机(single-phase induction motor)是一种常见的电动机类型,广泛应用于家庭和工业领域。
其性能参数和评价指标对于电机的选择、设计和运行至关重要。
本文将对单相感应电动机的性能参数和评价指标进行详细的介绍和分析。
首先,我们来了解一下单相感应电动机的基本原理。
单相感应电动机由固定的定子和旋转的转子组成。
定子绕组通过交流电源供电产生磁场,而转子受到磁场的作用而转动。
根据电机的构造和性能,以下是单相感应电动机的一些重要性能参数和评价指标。
1. 额定功率(Rated Power):指电动机正常运行时的功率值。
它是根据电机设计和制造参数来确定的,通常以千瓦(kW)为单位。
额定功率决定了电机能够承载的最大负载。
2. 额定电压(Rated Voltage):指电动机正常运行时所需的电压。
该数值由电机制造商根据设计参数确定,并以伏特(V)为单位。
电动机的额定电压决定了适用的电源电压范围,必须保持在合适的范围内以确保电机的正常运行。
3. 频率(Frequency):指电动机所需的交流电源频率。
在家庭和一些工业应用中,电源频率通常为50赫兹(Hz)或60赫兹(Hz)。
频率直接影响到电动机的运行速度,所以必须与电源频率相匹配。
4. 效率(Efficiency):用于评估电动机转换输入电能为有用功率的能力。
电动机的效率越高,其输出功率与输入功率的比例就越高。
高效率的电动机可以降低能源消耗,减少能源浪费。
5. 起动转矩(Starting Torque):指电动机在起动时所能输出的最大转矩。
起动转矩是衡量电动机起动能力的重要指标,特别是在需要启动重载和惯性负载时。
较大的起动转矩对于电机的启动过程来说是至关重要的。
6. 运行转矩(Running Torque):指电动机运行时可以产生的最大转矩。
运行转矩是电动机驱动负载的能力,过小的运行转矩可能导致电动机无法正常运行。
感应电机的参数辨识

收稿日期:20000622改稿日期:2001-02-28 设计分析 感应电机的参数辨识吴 峻,潘孟春,李圣怡,陈 轶(国防科技大学,长沙410073)Identification of I nduction Motor P arametersWU Jun ,P AN Meng -chun ,LI Sheng -yi ,CHEN Yi(National University of Defense T echnology ,Changsha 410073,China ) 摘 要:利用感应电机启动和稳态过程的简化模型,设计了一种利用最小二乘法原理的参数辨识方法,并且进行了实验和讨论。
关键词:参数估计;最小二乘法;感应电机中图分类号:TM344.4 文献标识码:A 文章编号:1004-7018(2001)06-0038-02Abstract :In this paper a least square method for identification of induction m otors paprameter is investigated with simplified m odels of start up and stable state.Als o in the end s ome experiments are pre 2sented and discussed.K eyw ords :parameter estimation ;least square method ;induction m otors1引 言现今交流电机的控制研究主要是在基于空间矢量的概念下的磁场定向控制、直接转矩控制、空间矢量PW M 等技术之间展开的,它们的共同点就是力求实现交流电机的控制特性线性化[5,6]。
但是交流电机作为一种非线性耦合的模型,需要在明确电机的参数的基础上,通过一定的控制方法,达到电机线性化的控制特性,同时调整控制参数,提高系统的响应性以及稳定性等。
综合负荷模型的电动机参数独立性分析和主导参数选取

综合负荷模型的电动机参数独立性分析和主导参数选取李立理,陆 超(清华大学电机系电力系统国家重点实验室,北京市100084)摘要:近年来,基于主导参数选择的参数实时辨识策略成为提升辨识效率的一个重要研究方向。
在负荷辨识领域,综合负荷模型得到了广泛应用,由于这一模型中电动机参数的复杂性,已有文献的主导参数选取策略往往采用灵敏度仿真方法,然而,灵敏度分析依赖于基准参数、扰动形式以及运行状况,难以反映出参数之间的相互影响,也缺乏有效的理论依据,因此存在较大的局限性。
针对综合负荷模型主导参数辨识问题,首先分析了其参数的独立性,推导了独立参数集和常规参数集之间的关系。
然后,根据电动机参数的内在特性,对模型参数进行了合理的简化,提出了一种独立参数个数更少的简化模型,以进一步减少主导参数个数。
相比已有文献,文中从机理上对综合负荷模型的主导参数选择进行了分析,并通过仿真算例验证了分析结果的正确性。
关键词:综合负荷模型;参数冗余;感应电动机;主导参数中图分类号:TM714收稿日期:2009202205;修回日期:2009203223。
0 引言传统综合负荷模型一般是由电动机并联部分静态负荷组成,其在电力系统仿真和实际辨识中得到了广泛的应用,具有机理性强、能够较好反映负荷动态特性的优点[1]。
近年来,随着负荷建模工作的深入,综合负荷模型开始成为一个研究热点,一些新的综合负荷模型结构和参数辨识方法也陆续提出。
在负荷模型结构方面,针对实际配电系统负荷的组成情况,有文献在传统综合负荷模型的基础上提出了考虑配电网模型的综合负荷模型以及考虑配网侧接入电源的广义负荷模型。
文献[2]介绍了考虑配电网模型的综合负荷模型并给出了其对东北电网4次三相短路试验的验证情况;文献[3]和文献[4]先后研究了传统综合负荷模型和考虑配电网的综合负荷模型的参数可辨识性;文献[5]和文献[6]研究了它们之间的相互关系以及折算方法;文献[7]研究了配电网接入电源对综合负荷的影响。
电机性能参数辨识与控制策略优化
电机性能参数辨识与控制策略优化电机是工业生产和生活中广泛使用的重要设备之一,其性能参数的辨识和控制策略的优化对于提高电机的效能和稳定性具有重要意义。
本文将从电机性能参数辨识和控制策略优化两个方面展开讨论。
一、电机性能参数辨识电机性能参数辨识是确定电机各项参数的过程,包括电阻、电感、电动势常数、转动惯量等。
辨识电机的性能参数可以精确地描述电机的特性,并为后续的控制策略优化提供基础。
1. 传统方法传统的电机性能参数辨识方法包括定子电阻测量法、空载试验法、堵转试验法等。
这些方法需要在实际工作中对电机进行试验,获取电机在不同工况下的性能数据,并通过数学模型进行参数辨识。
这种方法可以较为准确地辨识电机的性能参数,但需要较大的测试工作量和计算量。
2. 基于模型的辨识方法基于模型的辨识方法通过建立电机的数学模型,利用系统辨识的理论和方法进行参数辨识。
这种方法不需要进行实验,并且可以在较短的时间内得到较为准确的参数估计。
常用的方法有经验模态分解法、最小二乘法、粒子群优化等。
相比于传统方法,基于模型的辨识方法具有计算速度快、精度高等优点。
3. 基于人工智能的辨识方法近年来,随着人工智能的发展,基于机器学习和深度学习的电机性能参数辨识方法逐渐得到应用。
通过训练大量的数据和神经网络,可以实现对电机性能参数的准确辨识。
这种方法相比于传统方法和基于模型的辨识方法更加自动化和智能化。
二、控制策略优化电机的控制策略是保证其正常运转和提高效能的关键。
控制策略的优化可以提高电机的响应速度、稳定性和能效。
1. PID控制策略优化PID控制是一种常用的电机控制策略,它通过调节比例、积分和微分三个参数来实现电机速度的控制。
PID控制的优化可以包括参数整定和参数调整两个方面。
参数整定可以根据电机的特性和性能参数辨识结果,采用试错法、整定法等方法确定最优参数。
参数调整可以采用自适应控制、优化算法等方法进行动态的参数调整,提高控制系统的鲁棒性和性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T
∑
∂yc (ti ) [ yc (ti ) − yt (ti )] i =1 ∂α
N
T
(9)
由输出方程式(3)得
∂y ∂g ∂x ∂g ∂β ∂g = + + ∂α ∂x ∂α ∂β ∂α x0 ,u0 ∂α
(10)
其中, [∂β / ∂α ]x0 , u0 由稳态约束方程式(4)求得,即
张红斌 1,贺仁睦 1,刘应梅 2
(1.华北电力大学(北京)电力系,北京 102206;2.中国电力科学研究院,北京 100085)
ANALYSIS ON PARAMETER ANALYTIC SENSITIVITY OF INDUCTION MOTOR LOAD MODEL AND PARAMETER IDENTIFICATION STRATEGY
2 负荷模型参数辨识中存在的问题
通过动模实验的三阶感应电动机负荷模型参 数辨识,说明辨识中存在的问题。 负荷建模数据来源于 1996 年 8 月在清华大学
第 28 卷 第 6 期
电
网
技 术
11
国家重点实验室所做的动模实验。负荷由两台风 机(均为 1.0 kW) 、一台感应电动机(1.2 kW)及 两组白炽灯(1.2 kW 和 2.4 kW)构成,其中感应 电动机负荷为发电机带电炉。 选择 5 组扰动强度不同的实验数据分别辨识 等值三阶感应电动机模型参数。其中,第 1 组电 压突降 10 %,然后恢复;第 2 组电压突降 17 %, 然后恢复;第 3 组电压突降 30 %,然后恢复;第 4 组电压突降 80 %, 然后恢复; 第 5 组电压突降 80%, 然后恢复至 73 % 。参数辨识结果列于表 1 。表中 符号的含义: Rs 为定子电阻, xs 为定子自感抗,
ω b 为同步角速度; s 为感应电动机转差率。
′ , eq ′ , s )T , 输 入 变 量 Байду номын сангаас 义 状 态 变 量 x = ( ed
u = (uds , uqs )T ,输出变量 y = (ids , iqs )T ,待辨识参数
θ = (α T , β T )T ,其中 α 为独立参数, α = ( Rs , x′, T0′,
式中
′ 1 ded ′ + (xs − x′)iqs ] + sω b eq ′ dt = − T ′ [ed 0 ′ 1 deq ′ − ( xs − x′)ids ] − sω bed ′ = − [eq ′ t T d 0 ds = 1 [T (1 − s ) n − e′ i − e′ i ] q qs d ds dt 2 H L
表 1 感应电动机模型参数辨识结果 Identification result of induction motor model
第1组 0.143 6 1.286 8 0.151 5 0.209 7 88.499 0 13.463 3 0.104 4 第2组 0.099 1 1.549 8 0.167 0 0.220 7 72.029 4 12.454 8 5.670 1 第3组 0.126 6 1.448 0 0.141 5 0.221 7 49.771 6 5.799 4 4.799 5 第4组 0.248 6 1.168 6 0.211 2 0.109 1 7.196 8 1.798 2 0.163 1 第5组 0.269 3 1.005 0 0.167 5 0.092 8 10.343 6 1.942 2 0.185 1
2 x ′ 为等值电抗( x′ = xs − xm xr ) , xm 为定子转子 间互感抗, xr 为转子自感抗, T0′ 为时间常数, TL
别由式(5)和(6)表示。
′ ) + x ′(u qs − eq ′) Rs (u ds − ed ids = 2 2 Rs + x ′ ′ ) − x ′(u ds − ed ′) Rs (u qs − eq iqs = 2 2 Rs + x ′
1 引言
感应电动机是电力系统负荷中最主要的动态 负荷。目前,在电力系统动态稳定性研究中, 普遍 忽略异时、异地负荷构成的异常复杂性,而一成 不变地采用典型参数 [1,2] 感应电动机作为动态综合
负荷模型,这必然使研究结果与实际情况相去甚 远,甚至失去研究的实际意义和实用价值。 总体测辨法结合现场实测电力负荷特性数 据,利用系统辨识技术辨识具体负荷群的等值感 应电动机负荷模型参数,是克服上述缺点行之有 效的方法。但参数辨识实践表明 [3,4] :感应电动机 负荷模型中的有些参数(如定子、转子绕组的电 气参数等)无论在大扰动还是在小扰动情况下都 比较容易辨识,且辨识结果较稳定;而有些参数 (如惯性时间常数、机械参数等)则难以辨识, 且辨识结果不稳定,在大扰动和小扰动情况下的 辨识结果具有很大的离散性,有时甚至相差十几 倍到百倍。对此现象,有些学者认为是大扰动下 机械特性的非线性本质反映强烈所致[3],有学者从 可辨识性角度对该问题进行了理论研究,提出了 利用遗传算法全局寻优模型参数的方法。 本文针对感应电动机负荷模型参数辨识中存 在的问题,进行了电动机参数解析灵敏度分析, 指出了参数灵敏度与参数易辨识性之间的关系, 以及扰动强度与参数灵敏度之间的关系。最后提 出了一种新的感应电动机模型参数辨识策略,并 通过现场实测数据建模,验证了该辨识策略的有 效性及可行性。
第 28 卷 第 6 期 2004 年 3 月 文章编号:1000-3673(2004)06-0010-05
电 网 技 术 Power System Technology 中图分类号:TM714 文献标识码:A
Vol. 28 No. 6 Mar. 2004
感应电动机负荷模型参数解析灵敏度分析 及参数辨识策略研究
T T T
∑[ y (t ) − y (t )] [ y (t ) − y (t )] (8)
c i t i T c i t i i =1
N
响应偏差对独立参数 α 的灵敏度 L 即为响应 偏差 J (θ ) 对 α 的偏导数
L=
∂J ∂J ∂J ∂J ∂J ∂J = , , , , = ∂α ∂Rs ∂x′ ∂T0′ ∂n ∂H 2
ZHANG Hong-bin1,HE Ren-mu1,LIU Ying-mei2 (1.Dept. of Electric Power Engineering,North China Electric Power University,Beijing 102206,China; 2.China Electric Power Research Institute,Beijing 100085,China)
(5)
(6)
下脚标 d 和 q 分别表示直轴量和交轴量;下
和 n 为转矩系数, H 为惯性时间常数。
Tab. 1
Rs xs x′ T0′ n TL H
脚标 s 和 r 分别表示定子和转子量; e′ 为感应电动 ′ ; u 为系统电压激励, ′ + jeq 机暂态电势, e′ = ed u = uds + juqs ; i 为感应电动机电流, i = ids + jiqs ;
′ , eq0 ′ , s0 , xs )T 。 n, H )T , β 为非独立参数, β = (TL , ed0
本文除 T0′ 以外,其他下脚标中的“ 0 ”均表示初 始稳态值。 令方程组 (5) 左边导数项为零,再添加输出方 程组(6),可得稳态方程 h( x0 , u0 , y0 , α, β ) = 0