A38S磁旋转编码器说明书
2024版旋转编码器培训教程合集

2024/1/25
绝对式编码器与增量式编码器的比较
01
绝对式编码器可直接读取角度位置,而增量式编码器则需要通
过计数脉冲来计算位置。
光学编码器与磁性编码器的比较
02
光学编码器利用光电转换原理,而磁性编码器则利用磁感应原
理。两者在性能、价格、可靠性等方面存在差异。
不同分辨率编码器的比较
03
高分辨率编码器可提供更高的位置精度,但价格相对较高。
2024/1/25
7
分辨率与精度
分辨率
指旋转编码器能够测量的最小角度变化,通常以度、分、秒或弧度表示。高分 辨率意味着能够更精确地测量角度变化。
精度
表示旋转编码器的测量值与真实值之间的接近程度。精度越高,测量误差越小。
2024/1/25
8
重复性误差和线性度
重复性误差
指旋转编码器在相同条件下多次测量同一角度时,测量结果之间的差异。重复性误 差越小,编码器的稳定性越好。
2024/1/25
绝对式旋转编码器
直接输出数字信号,无需 计数器,分辨率有限但定 位准确。
混合式旋转编码器
兼具增量式和绝对式优点, 价格较高。
5
应用领域与市场需求
应用领域
机床、自动化设备、机器人、汽车、 航空航天等。
市场需求
高精度、高可靠性、小型化、低成本 等。
2024/1/25
6
02 旋转编码器性能指标
13
选择合适厂家及产品型号
了解市场上主流的旋 转编码器生产厂家及 其产品特点。
考虑价格、交货期、 售后服务等因素,进 行综合评估与选择。
2024/1/25
根据应用需求和性能 参数,筛选出符合要 求的厂家及产品型号。
编码器的作用及功能 使用方法
编码器的作用及功能使用方法简而言之,编码器是一种提供反馈的传感设备。
编码器将运动转换为电信号,并可以读取运动控制系统中的某些控制设备,如计数器或PLC。
编码器发送反馈信号,可用于确定位置、计数、速度或方向。
此信息可用于发送特定功能的命令。
市场上最早的编码器主要是解析器。
旋转变压器是一种电磁传感器,也称为同步旋转变压器。
它是一种测量角度的小型交流电机,用于测量旋转物体的轴角位移和角速度。
它由定子和转子组成。
定子绕组作为变压器的一次侧,接受励磁电压,励磁频率通常为400.3000和5000HZ。
转子绕组作为变压器的二次侧,通过电磁耦合获得感应电压。
编码器的作用及功能使用方法? 1.编码器作用电机可以通过编码器获得速度。
其主要原理是编码器可以根据电机输出脉冲数和统计脉冲数获得电机转数。
编码器信号(如位流:BitTorrent)是一种内容分发协议。
它使用高效的软件分发系统和点对点技术来共享大文件(如电影或电视节目),并允许每个用户提供上传服务,如网络重新分配点。
通用下载服务器为发送下载请求的用户提供下载服务。
BitTorrent 的工作方式不同。
分发者或文件持有者将文件发送给其中一个用户,然后将文件转发给其他用户。
用户相互转发自己的文件部分,直到每个用户的下载完成。
这种方法可以使下载服务器在使用大量带宽的同时处理多个大文件的下载请求。
比特流被称为比特流的“簇、散、聚”文件传输协议。
它是由程序员Bram Cohen使用Python求值编写的。
它也是一个开放源码的专利软件,可以免费下载和传播。
)或者准备数据、将其转换为可用通信、以信号形式传输和存储数据的设备。
2.编码器的使用法编码器将角位移或线性位移转换为电信号。
前者称为码盘,后者称为直尺。
编码器使用不同类型的技术来创建信号,包括机械、磁性、电阻和光学信号。
在光学传感器中,编码器根据光的中断提供反馈。
下图描述了使用光学技术的增量旋转编码器的基本结构。
LED光束穿过码盘,码盘上有不透明的线条(很像自行车车轮上的辐条)。
编码器快速使用说明

目 录
第一章 产品介绍.....................................................................................................................................2 1.1 产品概述................................................................................................................................... 2 1.2 产品主要功能特点..................................................................................................................... 2 1.3 设备线缆连接............................................................................................................................ 3 第二章 基本操作.....................................................................................................................................4 2.1 开机.......................................................................................................................................... 4 2.2 关机.......................................................................................................................................... 4 2.3 登录.......................................................................................................................................... 4 2.4 预览.......................................................................................................................................... 5 2.5 报警功能....................................................................................................................................5 2.5.1 移动侦测........................................................................................................................ 5 2.5.2 视频分析........................................................................................................................ 6 2.6 云台控制................................................................................................................................... 9 2.7 网络设置................................................................................................................................... 9 2.8 通道管理................................................................................................................................. 10 2.9 公网访问设备(云操作).........................................................................................................10 2.9.1 向导.............................................................................................................................. 11 2.9.2 按用户登录,管理设备(按用户登录,可以管理多台设备)..........................................14 2.9.3 按序列号登录,访问设备............................................................................................... 15 第三章 远程监控................................................................................................................................... 17 1.远程监控.....................................................................................................................................17 1.1 多机管理平台软件 CMS....................................................................................................... 17 1.2 web 监控........................................................................................................................... 17 2.基本远程操控............................................................................................................................ 19 2.1 画面分割.......................................................................................................................... 19 2.2 回放................................................................................................................................. 19 2.3 日志................................................................................................................................. 19 2.4 本地配置.......................................................................................................................... 19 2.5 通道操控.......................................................................................................................... 19 2.6 远程进行设备端配置.........................................................................................................19
旋转编码器详细讲解

增量式编码器的A.B.Z 编码器A、B、Z相及其关系TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系?对于这个问题的回答我们从以下几个方面说明:编码器只有A相、B相、Z相信号的概念。
所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。
“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三相主回路供电。
而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。
详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。
当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。
从而由此判断主轴是正转还是反转。
另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。
要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。
由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。
带U、V、W相的编码器,应该是伺服电机编码器A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的时候也能正常使用。
ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个;UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。
/######################################################## #####编码器A+A-B+B-Z+Z-怎么用分别代表什么意思?这种编码器的输出方式为长线驱动(line driver),其中A+A-B+B-Z+Z-为输出的信号线,增量编码器给出两相方波,它们的相位差90°(电气上),通常称为A通道和B通道。
旋转编码器调整方法word精品文档10页
四:旋转编码器的调整增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备A/B/Z 输出信号外,还具备互差120度的电子换相信号U/V/W,U/V/W各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的U/V/W电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的U/V绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置.2.用示波器观察编码器的U相信号和Z信号.3.调整编码器转轴与电机轴的相对位置.4.一边调整,一边观察编码器U和Z相信号跳变沿,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系。
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的U/V线反电势波形。
2.转动电机轴,编码器的U相信号上升沿与电机的U/V线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形。
AMS磁编码器产品介绍全面指导版
• 缺点:无法输出轴转动的绝对位置信息。
绝对编码器
• 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有 若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码 道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位 数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码 盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信 号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意 位置都可 读出一个固定的与位置相对应的数字码。显然,码道越多, 分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必 须有N条码道。
5
• 典型应用 康复器材 电位计 旋钮
工作温度 (℃) -40~125 -40~125
封装 TSSOP-16 SSOP-16
• AS5035
增量式编码器(8bit)
• 输出方式 两路正交A/B及 Index输出
AS5035 Block Diagram
型号
工作电压(V)
AS5035
3.3或5
• 典型应用 流量计 碎纸机 电动工具 自动门
废气再循环系统 (EGR) AS5163
油门踏板 AS5263
双向离合器 BLDC AS5134
拨片换挡 (AS5145)
汽车电子中的应用
-前大灯自适应调节系统(AFS) -变速箱位置检测 -废气再循环系统(EGR) -摩托车进气控制系统 -油门踏板 -节气阀 (TPS) -非接触式电位计
光编码器产品基本知识及常用术 语
主要应用于:
– 位置控制
– 速度控制
Baumer 磁敏感器编码器说明书
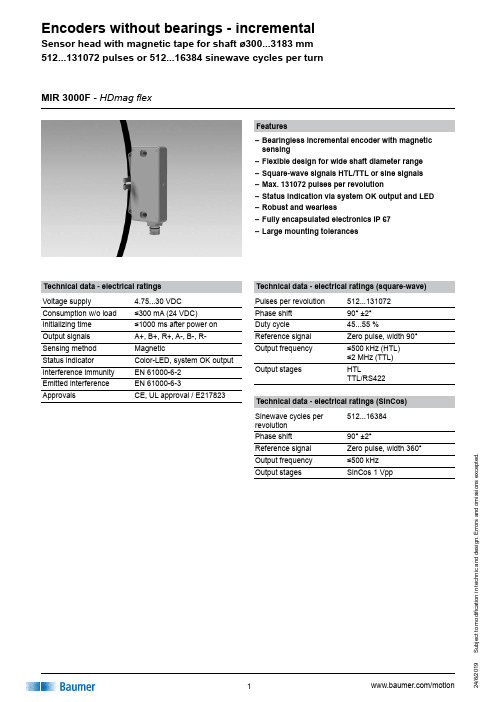
u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .Features–Bearingless incremental encoder with magnetic sensing–Flexible design for wide shaft diameter range –Square-wave signals HTL/TTL or sine signals –Max. 131072 pulses per revolution–Status indication via system OK output and LED –Robust and wearless–Fully encapsulated electronics IP 67 –Large mounting tolerancesTechnical data - electrical ratings (square-wave)Pulses per revolution 512...131072Phase shift 90° ±2°Duty cycle 45...55 %Reference signal Zero pulse, width 90°Output frequency ≤500 kHz (HTL) ≤2 MHz (TTL)Output stagesHTLTTL/RS422MIR 3000F - HDmag flexTechnical data - electrical ratings (SinCos)Sinewave cycles per revolution 512...16384Phase shift 90° ±2°Reference signal Zero pulse, width 360°Output frequency ≤500 kHz Output stagesSinCos 1 VppTechnical data - electrical ratings Voltage supply 4.75...30 VDC Consumption w/o load ≤300 mA (24 VDC)Initializing time ≤1000 ms after power on Output signals A+, B+, R+, A-, B-, R-Sensing method MagneticStatus indicator Color-LED, system OK output Interference immunity EN 61000-6-2Emitted interference EN 61000-6-3ApprovalsCE, UL approval / E217823u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .MIR 3000F - HDmag flexTechnical data - mechanical design Shaft typeø300...3183 mm (through hollow shaft)Dimensions (sensor head)165 x 25 x 93 mm Axial tolerance ±5 mm (belt to head)Radial tolerance1...3 mm (belt to head)Protection DIN EN 60529IP 67Operating speed≤1850 rpm (ø300 mm) ≤150 rpm (ø1500 mm) see diagram belowMaterialsHousing sensing head: aluminium alloyMagnetic belt: stainless steel (1.4104)Operating temperature -40...+85 °CResistanceIEC 60068-2-6Vibration 30 g, 10-2000 Hz IEC 60068-2-27 Shock 300 g, 6 msWeight approx.730 g (head), 120 g (belt/m), 17 g (lock)ConnectionFlange connector M23, 12-pin30507090110130150170S p e e d [r p m ]Shaft diameter [mm]190210230250270290310Speed dependent on the shaft diameteru b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .MIR 3000F - HDmag flexPart number MIR3000F-.....M..AOperating temperature A -40...+85 °CPulse number/sinewave cycles - see tableVoltage supply / output stagesQ 4.75...30 VDC, HTL (Vin = Vout), 6 channel F 4.75...30 VDC, TTL/RS422, 6 channel T 4.75...30 VDC, SinCos (1 Vpp), 6 channelConnectionM Flange connector M23, tangential 12-pin, male, CCWShaft diameter (mm)....0300 (3183)Other pulse numbers/sinewave cycles on request.Maximum sinewave cycles 16384 for SinCos output.AccessoriesConnectors and cables HEK 8Sensor cable for encoders11068549Mating connector M23, solder version, 12-pin, CWPulse number/sinewave cycles 512102450001638472020488192327681000409610000131072u b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .Terminal assignmentOutput signalsMIR 3000F - HDmag flexu b j e c t t o m o d i fi c a t i o n i n t e c h n i c a n d d e s i g n . E r r o r s a n d o m i s s i o n s e x c e p t e d .MIR 3000F - HDmag flexDimensions。
旋转编码开关(RotaryEncoderswitch)使用说明及程序

旋转编码开关(Rotary Encoder switch)-使用说明及程序具有左转,右转,按下三个功能.4.5 脚是中间按下去地开关接线 1 23 脚一般是中间2脚接地,1.3 脚上拉电阻后,当左转.右转旋纽时,在1.3 脚就有脉冲信号输出了.着这是标准资料:在单片机编程时,左转和右转地判别是难点,用示波器观察这种开关左转和右转时两个输出脚地信号有个相位差,见下图:由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时地状态就可以判断出是左旋转或是右旋转了.还有另外一种3 脚地,除了不带按钮开关外,和上面是一样地使用.参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚地电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平地状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st 为1 执行下面地步骤{if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关地两个引脚都为底电平执行下面地步骤{if(Bold) //为高说明编码开关在向加大地方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小地方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D 管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp & 0x03; //取编码器A.B 相电平信号}else{couch_ba = temp & 0x03; //取编码器A.B 相电平信号if(pr_couch_ba == 0x00){if(couch_ba == 0x01){couch_num++; //水平床码加1}else if(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x01){if(couch_ba == 0x11){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(couch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(couch_ba == 0x10){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬地旋转编码器地检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005 年1 月15 用KEIL编译.硬件测试通过//注意:编码器地信号,程序未做消抖处理.测试中,A/B信号上各//接了一只104地瓷片电容,工作很正常.如果不接电容,请自行编//写信号消抖程序.#include <at89x51.h>sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反转;main(){EA=1; //总中断允许EX0=1; //外部中断0允许IT0=1; //外部中断0为边沿触发方式while(1);;}/*********************编码器中断函数入口:无出口:无*********************/void encoder(void) interrupt 0 { //外部中断0if (INT1){led=1;}else{led=0;}}whimsy 地AVR 程序//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 地PD2),以此为基准,B 用来判断方向(连到AVR 地PA1), C 接地//A -|// | -----|__________|----------|____________//C -|////B -|// | ----------|__________|----------|____________//C -|// CW ===>>> ROTATION//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意地逻辑电平变化都将引发中断#pragma interrupt_handler int0_isr:2void int0_isr(void){//external interupt on INT0GICR=0; //禁止外部中断if ((PIND & 0x04)==0) //先判断是高电平产生地中断还是低点平地中断if ((PINA & 0x02)==0) //再判断B 线上地电平{keycounter--;keydirection="0";}个人收集整理资料,仅供交流学习,勿作商业用途else{keycounter++;keydirection="1";}elseif ((PINA & 0x02)==0){keycounter++;keydirection="1";}else{keycounter--;keydirection=0;}GICR=0x40;}。
Northatar HSD38 高重载型编码器 说明书

标准工作特征编码方式:增量型分辨率:高达5000 PPR。
参阅订货信息。
格式:两通道正交方波(AB),带可选零位信号Z 和互补输出相位检测:从编码器轴夹紧端方向看,A 超前B 编码器逆时针旋转正交相位:90o ±15o 电气对称性:180o ±18o 电气波形:方波上升沿和下降沿小于1ms,输入电容1000p电气输入功率:5-26VDC。
最大50 mA,不包括输出载荷。
输出:ET7272、ET7273频率响应:125 kHz终端:MS 连接器、M12连接器,电缆输出带密封圈。
参阅订货信息。
配套连接器:6针MS,MS3106A-14S-6S 型(MCN-N4);7针MS,MS3106A-16S-1S 型(MCN-N5);10针MS,MS3106A-18-1S 型(MCN-N6);电缆带 5针M12连接器,p/n 112859-xxx 电缆带 8针M12连接器,p/n 112860-xxx数据和零位未显示所有的互补信号。
Ā显示的内容供参考HSD38高重载型应用/行业说明NorthStar 的HSD38高重载型工业空心轴编码器的轴直径高达1" ,可在-40~100℃温度下可靠地运行。
硬质的阳极化涂饰外壳超出了防护等级IP66/IP67和NEMA 6的外壳要求。
这款坚固耐用的编码器具有双重密封机壳,允许日常冲洗和应用在高压或腐蚀性化学物品的环境。
编码器使用先进的Opto ASIC 和创新的封装技术,在高冲击和振动的环境仍然可以运行。
特性和优点●不易破损的码盘●空心轴安装●重载轴密封圈●密封连接器●铸模外壳最大程度地提高了抗扰度和持久性●具有ATEX 认证机械轴材料:铝6061-T6孔径:1.00"、0.875、0.750"、0.625"、0.500"、16mm、15mm、12mm。
1"以下孔具有绝缘套管孔径向跳动:中点处最小±0.0005 TIR 轴啮合:1.25"启动转矩:最大4.0 in-oz(25℃)运行转矩:最大3.0 in-oz(室温)轴承:61806-ZZ轴承使用寿命:额定轴载荷下5 x 108 转,额定轴载荷10%状态下,5 x 1011 转。
旋转编码器工作方式图解

旋转编码器旋转编码器是由光栅盘(又叫分度码盘)和光电检测装置(又叫接收器)组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光栅盘与电机同轴,电机旋转时,光栅盘与电机同速旋转,发光二极管垂直照射光栅盘,把光栅盘图像投射到由光敏元件构成的光电检测装置(接收器)上,光栅盘转动所产生的光变化经转换后以相应的脉冲信号的变化输出。
编码器码盘的材料有玻璃、金属、塑料等。
玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。
金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性也比玻璃的差一个数量级。
塑料码盘成本低廉,但精度、热稳定性、寿命均要差一些。
编码器以信号原理来分,有增量式编码器(SPC)和绝对式编码器(APC),顾名思义,绝对式编码器可以记录编码器在一个绝对坐标系上的位置,而增量式编码器可以输出编码器从预定义的起始位置发生的增量变化。
增量式编码器需要使用额外的电子设备(通常是PLC、计数器或变频器)以进行脉冲计数,并将脉冲数据转换为速度或运动数据,而绝对式编码器可产生能够识别绝对位置的数字信号。
综上所述,增量式编码器通常更适用于低性能的简单应用,而绝对式编码器则是更为复杂的关键应用的最佳选择--这些应用具有更高的速度和位置控制要求。
输出类型取决于具体应用。
一:增量式旋转编码器工作原理增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。
图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。
当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为:我们把当前的A、B输出值保存起来,与下一个到来的A、B输出值做比较,就可以得出角度码盘转动的方向,如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,再除以所用的时间,就得到此次角度码盘运动的角速度。
旋转编码器工作原理 __编码器
旋转编码器工作原理 __编码器旋转编码器工作原理编码器是一种用于测量和控制旋转运动的装置。
它将旋转运动转换为电信号,以便用于位置检测、速度测量和角度控制等应用。
旋转编码器通常由光学或磁性传感器组成,可以实现高精度的测量。
一、工作原理旋转编码器的工作原理主要分为光学编码器和磁性编码器两种。
1. 光学编码器光学编码器采用光栅原理,通过光栅盘和光电传感器实现测量。
光栅盘上有许多等距排列的透明和不透明条纹,当光线照射到光栅盘上时,透明和不透明条纹会交替出现,光电传感器会根据光线的变化产生相应的电信号。
通过测量电信号的脉冲数和方向,可以确定旋转的位置和速度。
2. 磁性编码器磁性编码器使用磁场传感器来测量旋转运动。
磁性编码器由磁性编码盘和磁传感器组成。
磁性编码盘上有许多等距排列的磁性极性,磁传感器通过检测磁场的变化来产生电信号。
磁性编码器具有较高的抗干扰能力和耐用性,适用于工业环境中的高精度测量。
二、编码器类型根据输出信号的形式,编码器可以分为绝对编码器和增量编码器。
1. 绝对编码器绝对编码器可以直接输出旋转位置的绝对值。
它们通常具有多个通道,每个通道对应一个二进制位。
通过读取各个通道的状态,可以直接获取旋转位置的二进制码。
绝对编码器在断电后可以保持位置信息,不需要重新校准。
2. 增量编码器增量编码器只能输出旋转位置的增量值。
它们通常具有两个通道,一个通道用于测量旋转方向,另一个通道用于测量旋转的脉冲数。
通过计算脉冲数和方向,可以获取旋转位置的相对变化。
增量编码器在断电后需要重新校准,无法直接获取绝对位置信息。
三、应用领域旋转编码器广泛应用于机械工程、自动化控制、机器人和数控设备等领域。
1. 位置检测旋转编码器可以用于测量机械设备的位置,例如机床、印刷机和纺织机等。
通过实时监测旋转位置,可以实现精确的位置控制,提高生产效率和质量。
2. 速度测量旋转编码器可以用于测量旋转运动的速度,例如电机和风机等。
通过监测旋转的脉冲数和时间间隔,可以计算出旋转的速度,以便进行调节和控制。
旋转编码器工作原理 __编码器
旋转编码器工作原理 __编码器旋转编码器工作原理编码器是一种用于测量和控制旋转运动的设备。
它通常由一个旋转部件和一个固定部件组成。
旋转部件与被测量的旋转物体相连,而固定部件安装在固定的位置上。
编码器的工作原理基于光电效应或磁电效应。
下面将分别介绍这两种类型的编码器。
1. 光电编码器:光电编码器利用光电传感器和光栅来测量旋转运动。
光栅是一个由透明和不透明线条交替排列的光学元件。
当旋转部件旋转时,光栅会阻挡或透过光线,从而产生光电传感器上的脉冲信号。
通过计算脉冲信号的数量和方向,可以确定旋转部件的位置和速度。
2. 磁电编码器:磁电编码器利用磁场和磁传感器来测量旋转运动。
旋转部件上安装有一个磁体,而固定部件上安装有磁传感器。
当旋转部件旋转时,磁体会产生磁场,磁传感器会检测磁场的变化,并将其转换为电信号。
通过分析电信号的变化,可以确定旋转部件的位置和速度。
编码器可以分为增量式编码器和绝对式编码器。
1. 增量式编码器:增量式编码器测量的是旋转部件的相对运动。
它们通常具有两个输出信号,一个是A相信号,另一个是B相信号。
A相信号和B相信号之间存在90度的相位差,可以通过检测脉冲信号的相对位置和方向来确定旋转部件的运动。
2. 绝对式编码器:绝对式编码器可以直接测量旋转部件的绝对位置。
它们通常具有多个输出信号,每个信号对应一个特定的位置。
通过检测输出信号的组合,可以准确地确定旋转部件的位置。
编码器广泛应用于机械工程、自动化控制、机器人技术等领域。
它们可以用于测量机械臂的位置和速度、控制电机的转速和方向等。
编码器的高精度和可靠性使其成为现代工业中不可或缺的设备。
总结:旋转编码器是一种用于测量和控制旋转运动的设备。
它可以通过光电效应或磁电效应来测量旋转部件的位置和速度。
编码器可以分为增量式编码器和绝对式编码器,用于测量相对运动和绝对位置。
编码器在机械工程、自动化控制和机器人技术等领域有着广泛的应用。
编码器使用说明
编码器使用说明光电编码器基础1.1 概述光电编码器是一种集光、机、电为一体的数字化检测装置,它具有分辨率高、精度高、结构简单、体积小、使用可靠、易于维护、性价比高等优点。
近10几年来,发展为一种成熟的多规格、高性能的系列工业化产品,在数控机床、机器人、雷达、光电经纬仪、地面指挥仪、高精度闭环调速系统、伺服系统等诸多领域中得到了广泛的应用。
光电编码器可以定义为:一种通过光电转换,将输至轴上的机械、几何位移量转换成脉冲或数字量的传感器,它主要用于速度或位置(角度)的检测。
典型的光电编码器由码盘(Disk)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
一般来说,根据光电编码器产生脉冲的方式不同,可以分为增量式、绝对式以及复合式三大类。
按编码器运动部件的运动方式来分,可以分为旋转式和直线式两种。
由于直线式运动可以借助机械连接转变为旋转式运动,反之亦然。
因此,只有在那些结构形式和运动方式都有利于使用直线式光电编码器的场合才予使用。
旋转式光电编码器容易做成全封闭型式,易于实现小型化,传感长度较长,具有较长的环境适用能力,因而在实际工业生产中得到广泛的应用,在本书中主要针对旋转式光电编码器,如不特别说明,所提到的光电编码器则指旋转式光电编码器。
1.2 增量式光电编码器1.2.1 原理及其结构增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。
它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。
一般来说,增量式光电编码器输出A、B两相互差电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。
同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。
编码器转换板说明书
倍频跳线
步进电机驱动器接口
编码器接口
安装方式:
DIN
4*M3
运用: 电子手轮的手动定位 单片机编码器接口
)孔
装安轨导
(装安丝螺
Байду номын сангаас
编码器转换板说明书欧姆龙编码器说明书编码器说明书编码器信号转换器编码器旋转编码器光电编码器编码器工作原理视频编码器encoder编码器
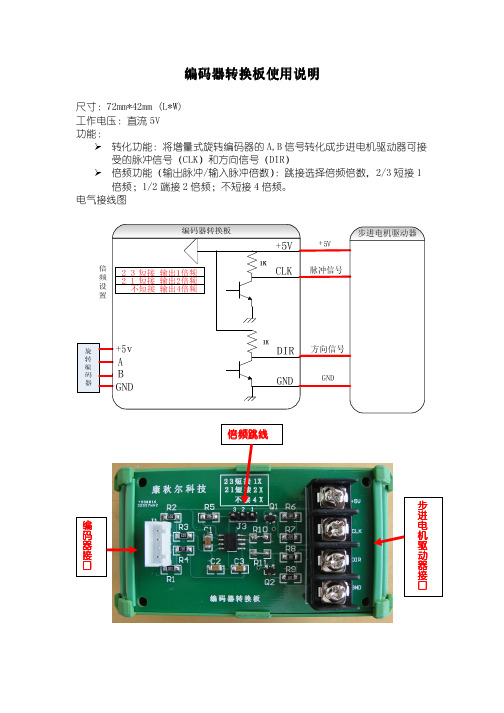
编码器转换板使用说明
尺寸:72mm*42mm (L*W) 工作电压:直流 5V 功能: 转化功能:将增量式旋转编码器的 A,B 信号转化成步进电机驱动器可接 受的脉冲信号(CLK)和方向信号(DIR) 倍频功能(输出脉冲/输入脉冲倍数) :跳接选择倍频倍数,2/3 短接 1 倍频;1/2 端接 2 倍频;不短接 4 倍频。 电气接线图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F.G(屏蔽线)
控制输出线路图
推拉输出 编码器内部电路
外部连接
NPN 集电极开路输出 编码器内部电路 外部连接
电压输出 编码器内部电路
外部连接
长线驱动输出 编码器内部电路
外部连接
输出波形
推拉输出/NPN 集电极开路输出/电压输出
长线驱动输出
IBB 埃伯格
尺寸图
使用注意事项
512: 5‐12V±5% 524: 5‐24V±5%
规格/性能
电气性能
控制输出
Байду номын сангаас
集电极开路
负载电流:30mA 以下,残留电压:0.4V 以下
电压输出
负载电流:10mA 以下,残留电压:0.4V 以下
推拉输出
LOW 时(负载电流:30mA 以下,残留电压:0.4V 以下)
HIGH 时(负载电流:10mA 以下,残留电压:额定电压‐2.5V 以上)
1. 安装本产品的时候,如果偏心或偏差角度太大,将会缩短使用寿命 2. 请不要在以下环境使用,否则可能会引起故障
a) 强烈的撞击或者震动 b) 有腐蚀性或者易燃气体里面 c) 酸性或者碱性物质附近 d) 温度和湿度超过允许范围的地方 e) 阳光直射的地方 3. 如果收到强烈撞击,可能会发出错误的脉冲信号。 4. 产品的连接线不要用超过 30N 的力拉动电缆 5. 当附近 有高压线或电源线时,请用屏蔽导管将电缆套起来以防止发生故障 6. 延长线缆时可能会受到干扰,尽量在短距离内使用 7. 屏蔽线应该良好接地
A38S 系列使用手册
IBB 埃伯格
s 概要 本产品为磁性增量式旋转编码器,通过霍尔感应将磁铁的旋转运动转换为脉冲
输出,可以准确的测量出速度、角度、长度等。由于是非接触式霍尔感应,所以有 很强的抗震、防油、防尘、防水、耐高温等性能,可用在光电式旋转编码器不宜使 用的恶劣工作环境。 型号说明
A
38
S
6
‐XXX X
X
X
XXX
系列 壳直径 轴类型 轴直径 分辨率 输出格式
输出相 线缆
电压
通用 磁性 旋转 编码 器
Φ38mm
S:实心轴 K:孔
Φ6mm
32 64 128 256 1024
E:电压输出 C:集电极开漏输出 F:推挽输出 L:长线输出
3: A/B/Z 6: A/B/Z
//
C:航插侧出 G:电缆侧出 H:航插后出 E:电缆后出
长线驱动
1us 以下(电缆长度:1m,吸收电流:20mA 以下)
输出相位差 A,B 相间的相位差:T/4±T/8(A 相的 1 周期是 T)
响应频率
100KHZ
额定电压
5‐24VDC±5%
消耗电流
70mA 以下(无负荷)
接线方式
电缆引出型,连接器引出型(具有防反接,误接保护)
机械性能
启动扭矩 0.98mN·m 以下
长线驱动
LOW 时(负载电流:20mA 以下,残留电压:0.4V 以下)
HIGH 时(负载电流:20mA 以下,残留电压:2.5V 以上)
响应时间
集电极开路
1us 以下(电缆长度:1m,吸收电流:20mA 以下)
电压输出
1us 以下(电缆长度:1m,吸收电流:20mA 以下)
推拉输出
1us 以下(电缆长度:1m,吸收电流:10mA 以下)
惯性力矩
1×10-6 kg·m2以下
轴允许力 径向 30N
轴向 20N
最大转速 6000r/min
环境性能
绝缘阻抗 20MΩ以上
耐电压 耐振动 耐冲击 环境温度 环境湿度 防护等级
500VAC(50/60HZ,时间 1 分钟,端子和外壳之间) 50m/s2 , 10‐200㎐ X,Y,Z方向各2小时 1000m/s2 X、Y、Z各方向 3 次 ‐10~70℃(但没有结露的状态),保存时:‐25~85℃(不结冰) 动作时、保存时:各35~85% R.H IP54(IEC 规格)
电缆 材质
¢5.0mm,长度:1.0m,防护电缆 外壳 铝
本体 铝
轴
钢
重量
约 0.11kg
接线图
电压输出,推拉输出,NPN 集电极开路输出
长线驱动输出
绿:OUT A 白:OUT B 黄:OUT Z 红:5‐24VDC 黑:0V(GND) F.G(屏蔽线)
IBB 埃伯格
绿:OUT A 白:OUT B 黄:OUT Z 褐:OUT A‐ 灰:OUT B‐ 橙:OUT C‐ 红:5‐24VD