第四讲非对称特征值问题
第七章 特征值问题的迭代解法
在幂迭代中, 我们取 x(m−1) 为近似特征向量. 显然, 如果我们在 Km (A, x(0) ) 中找出 “最佳” 的近似特征向 量, 则收敛速度就可能会大大加快. 下面我们讨论如何在 Km = Km (A, x(0) ) 中寻找 “最佳” 的近似特征向量. 设 A ∈ Rn×n , 并设 Km 和 ˜ x Lm 是 Rn 的两个 m 维子空间. 投影算法就是在寻找 A 的近似特征对 (λ, ˜), 满足下面的 Petrov-Galerkin 条 件 ˜ ∈ C and x find λ ˜ ∈ Km such that ˜x Ax ˜−λ ˜ ⊥ Lm . (7.1)
· 7-4 ·
7.2
Rayleigh-Ritz 算法
事实上, 我们可以在 Km (A, x(0) ) 中找出 m 个最佳近似特征向量及相应的最佳近似特征值. 这些近似 特征值和近似特征向量就是 Ritz 值 和 Ritz 向量. 定义 7.1 设 Km 是 Rn×n 的 一 个 m 维 子 空 间, 它 的 一 组 标 准 正 交 基 为 v0 , v1 , . . . , vm−1 , 并 令 Vm = T ˜ y ) 是 Tm 的一组特征对, 即 Tm y = λy ˜ 且 ∥y ∥2 = 1. 则我们成 [v0 , v1 , . . . , vm−1 ]. 记 Tm = Vm AVm , 设 (λ, ˜ 是 A 的一个 Ritz 值, x λ ˜ = Vm y 是 A 的一个 Ritz 向量. Rayleigh-Ritz 算法 就是用 Ritz 值和 Ritz 向量来近似 A 的特征值与特征向量. 算法 7.2 Rayleigh Ritz procedure
T Tm = Vm AVm
α1 β1 β ... 1 = .. .
第六章 非对称特征值问题的计算方法

第六章非对称特征值问题的计算方法这一章我们来介绍矩阵特征值和特征向量的计算方法。
大家知道,求一个矩阵的特征值问题实质上是求一个多项式的根的问题。
而数学上已经证明:5阶以上的多项式的根一般不能用有限次运算求得。
因此,矩阵特征值的计算方法本质上都是迭代的。
目前,已有不少非常成熟的数值方法用于计算矩阵的全部或部分特征值和特征向量。
而全面系统地介绍所有这些重要的数值方法,会远远超出我们这门课程的范围,因而这里我们仅介绍几类最常用的基本方法。
6·1 基本概念和性质设,一个复数称作是的一个特征值是指存在非零向量使得.复向量称作是关于特征值的特征向量.复数是A的一个特征值的充分必要条件是,因而称多项式为A的特征多项式.显然阶矩阵的特征多项式是一个首项系数为1的次多项式,而且有个特征值.记A的特征值的全体为,通常称之为A的谱集.假定有如下分解其中,,则称为的代数重数(简称重数);而称数为的几何重数。
易知如果,则称是A的一个单特征值;否则,称是A的一个重特征值。
对于一个特征值,如果,则称其是A的一个半单特征值。
显然,单特征值必是半单特征值。
如果A的所有特征值都是半单的,则称A是非亏损的。
容易证明,A是非亏损的充分必要条件是A有个线性无关的特征向量(即A是可对角化矩阵)。
设.若存在非奇异阵使得则称A与B是相似的,而上述变换称作是相似变换.若A与B相似,则A和B有相同的特征值,而且是A的一特征向量的充分必要条件是是B的一个特征向量.这样,如果我们能够找到一个适当的变换矩阵,使B的特征值和特征向量易于求得,则我们就可立即得到A的特征值和相应的特征向量.很多计算矩阵特征值和特征向量的方法正是基于这一基本思想而得到的.从理论上讲,利用相似变换可以将一个矩阵约化成的最简单形式是Jordan标准型,即有定理6·1·1(Jordan分解定理)设有个互不相同的特征值,其重数分别为,则必存在一个非奇异矩阵使得其中并且除了的排列次序可以改变外是唯一确定的。
矩阵的奇异值分解

非对称矩阵分解
非对称矩阵的特征值分解
对于非对称矩阵,其特征值可能是复数,因此不能直接进行实数域上的特征值分 解。但是,可以通过引入复数域上的特征向量和特征值,将非对称矩阵分解为复 数域上的特征向量矩阵和特征值矩阵的乘积。
非对称矩阵的奇异值分解
对于任意实非对称矩阵,都可以进行奇异值分解,即$A = USigma V^T$,其中 $U$和$V$是正交矩阵,$Sigma$是对角矩阵,对角线上的元素是$A$的奇异值。 非对称矩阵的奇异值分解在数据降维、图像处理等领域有广泛应用。
通信信道均衡策略
信道均衡原理
在通信系统中,信道均衡是一种用于补偿信道失真、提高通信质量的技术。奇异值分解可用于信道均衡中的信道 矩阵分解,从而实现对信道特性的准确估计和补偿。
基于奇异值分解的信道均衡算法
利用奇异值分解对信道矩阵进行分解,根据得到的奇异值和左右奇异向量设计均衡器,实现对信道失真的有效补 偿。
3
个性化推荐
结合用户历史行为数据和相似度计算结果,为用 户推荐与其兴趣相似的物品或服务。
05 奇异值分解在信号处理和 通信中应用
信号降噪与重构技术
基于奇异值分解的信号降噪
利用奇异值分解能够将信号分解为多个独立成分的特点,对含噪信号进行降噪处理,提高信号质量。
信号重构技术
通过保留奇异值分解得到的主要成分,对信号进行重构,实现信号的压缩和恢复。
特殊类型矩阵分解
正定矩阵的Cholesky分解
对于正定矩阵,可以进行Cholesky分解,即$A = LL^T$,其中$L$是下三角 矩阵。Cholesky分解在求解线性方程组、最优化问题等场景中具有重要作用。
稀疏矩阵的分解
对于稀疏矩阵,可以采用特定的分解方法,如LU分解、QR分解等,以便更有效 地进行存储和计算。这些分解方法在数值计算、科学计算等领域有广泛应用。
非对称特征值问题-基本概念

2.0003 0.8171 3.6516 , A25 0.0002 0.3336 3.7 263 0.7456 2.3333
2.0002 2.9999 2.2374 。 A26 0.0001 2.9996 2.23 66 2.2349 0.9998
我们称这种分块上三交阵为矩阵A的Schur分块上三角阵,
为了节省运算工作量,实用的方法是先将矩阵约化为与Schur分块上三角
阵相似的Hessenberg形。
(bij) Rnn的次对角线以下的元素bij =0 定义 若矩阵B
(i>j+1), 则称B为上Hessenberg矩阵,简称Hessenberg形,即
0.283205888 A3 0.157002612 0 0.287735078 A4 0.036401350 0
Pn2,则定理得证。
推论 对于任何对称矩阵A Rnn , 存在正交阵Q,使得B QT AQ为 对称三对角阵。
4.2
QR算法及其收敛性
QR算法可以用来求任意的非奇异矩阵的全部特征值,是目前计算这类问 题最有效的方法之一。它基于对任何实的非奇异矩阵都可以分解为正交阵Q和 上三角矩阵R的乘积。
设向量w Rn , w 2 1, 则称
H (w) I 2wwT
为(初等)镜面反射矩阵或Householder变换矩阵。
Houholder矩阵H=H(w)有如下性质:
(1) (2)
H是对称正交阵,即H H T H 1。
对任何x Rn , 记y Hx, 有 y 2 x 2
1 B
n 1
非对称广义特征值问题的并行同伦-行列式算法
非对称广义特征值问题的并行同伦-行列式算法非对称广义特征值问题是一个经典的数值线性代数问题,涉及到计算矩阵的广义特征值以及对应的特征向量。
在实际应用中,这个问题的规模往往很大,需要使用高效的并行算法来加速计算过程。
本文将介绍一种并行同伦-行列式算法来求解非对称广义特征值问题。
一、问题描述给定一个n阶矩阵A,广义特征值问题可以表示为Ax=λBx,其中B是一个非奇异的n阶对称正定矩阵,x是非零向量,λ是实数。
求解这个问题可以得到广义特征值λ和对应的特征向量x。
二、算法思想并行同伦-行列式算法是一种基于行列式计算的方法,通过计算矩阵行列式的变化来求解特征值问题。
算法的基本思路是通过同伦方法将原始的广义特征值问题转化为一系列的标准特征值问题(特征值问题中的B矩阵为单位阵)。
具体而言,通过引入一个可逆矩阵Q,将原始问题转化为:AQy=λy其中y=Qx,y是新的特征向量,Q是可逆矩阵。
对于新的特征值问题,可以使用标准的特征值求解算法来求解。
将得到的特征值记为μ,对应的特征向量为y,则原始特征值问题的解可以表示为x=Qy。
为了求解标准特征值问题,可以使用行列式计算的方法。
对于给定的矩阵C,可以通过计算其行列式来求解标准特征值。
并行同伦-行列式算法将利用这一性质来求解广义特征值问题。
三、算法流程并行同伦-行列式算法的基本流程如下:1.随机生成一个可逆矩阵Q;2.计算新的特征值问题AQy=μy,其中μ是一个待求解的特征值;3.将特征值问题转化为求解矩阵行列式的问题,即计算,AQ-μI,=0;4.采用并行行列式计算算法,对每个线程分配不同的行片段,使用LU分解方法计算行列式;5.对得到的特征值μ,使用标准特征值求解方法求解特征向量y;6.将得到的特征向量y转化为原始广义特征值问题的特征向量x,即x=Qy。
四、算法优势并行同伦-行列式算法相比于传统的解特征值问题的方法具有以下优势:1.并行计算:算法采用并行行列式计算算法,可以充分发挥多核计算机和分布式系统的计算能力,加速求解过程;2.可扩展性:算法可以适应不同规模的问题,只需要调整行片段的划分方式即可,具有较好的可扩展性;3.数值稳定性:算法使用LU分解方法计算行列式,避免了直接计算行列式的数值稳定性问题,能够在较大规模的问题上保持数值稳定性;4.适用范围广:算法适用于一般的非对称广义特征值问题,可以满足不同应用场景的需求。
4 非对称特征值问题
则称 λ 为 A 的特征值, x 为 A 对应于 λ 的(右)特征向量, y 为 A 对应于 λ 的左特征向 量。 关于特征值的几个说明: • 只有当 A 是方阵时,才能讨论特征值与特征向量; • 实矩阵的特征值与特征向量有可能是复的; • n 阶矩阵总是存在 n 个特征值(其中可能有相等的) ;
4.2 预备知识 • 特征值的代数重数与几何重数; • 相似变换不改变矩阵的特征值; 定义 4.3 设 A ∈ Rn×n 。若存在一个非奇异矩阵 X ∈ Cn×n ,使得 X −1 AX = Λ,
4.2
预备知识
4.2.1 特征值与特征向量
定义 4.1 设 A ∈ Rn×n ,称 p(λ) = det(A − λI ) 为 A 的特征多项式, p(λ) = 0 的根是 A 的特征 值。 定义 4.2 设 A ∈ Rn×n 。若存在 λ ∈ C 和非零向量 x, y ∈ Cn ,满足 Ax = λ x, y∗ A = λy∗ ,
4.2 预备知识
·4·
4.2.4 Schur 标准型
定理 4.5 设 A ∈ Cn×n ,则存在一个酉矩阵 U ∈ Cn×n 使得 λ1 b12 · · · b1n 0 λ b 2 2 n ∆ ∗ = R, U AU = . . . . . . . . . 0 · · · 0 λn 其中 λ1 , λ2 , . . . , λn 是 A 的特征值。 证明 我们对 n 使用归纳法证明。 当 n = 1 时,结论显然成立。 假设结论对所有阶数不超过 n − 1 的矩阵都成立。考虑 n 阶矩阵 A ∈ Cn×n 。设 λ 是 A 的一个特征值,其对应的特征向量为 x ∈ Cn ,且 ∥ x∥2 = 1。构造一个以 x 为第一列的酉矩 ˜ ]。于是 阵 X = [ x, X ˜ x∗ x∗ Ax x∗ AX ∗ ˜] = . X AX = ˜ ∗ A [ x, X ˜∗ ∗ ˜ AX ˜ X X Ax X ˜ ∗ Ax = X ˜ ∗ · λ x = λX ˜ ∗ x = 0,故 因为 x∗ Ax = x∗ · λ x = λ x∗ x = λ,且 X ˜ ˜ 12 λ x∗ A X λ A ∆ ∗ X AX = = . ∗ ˜ ˜ ˜ 0 X AX 0 A22 ˜ ∈ C(n−1)×(n−1) 使得 U ˜ ∗ A22 U ˜ =R ˜ ∈ C(n−1)×(n−1) 是一个上三角 根据归纳假设,存在酉矩阵 U 矩阵。令 1 0 U = X . ˜ 0 U 则有 1 U AU = 0 1 = 0 λ = 0 λ = 0
非对称博弈的表示和求解
段的决策 ,局中人 1和局中人 2将 同时选择一个 该产
5 研究 开 发 R sac dD v l met O eerha eeo n n p
能够 以 自然 的表示形式来描述 复杂的博弈并将变量级
题 。给 出了该模型详细的求解算法,并使用一个实例来加 以说 明。
关键 词:博弈模型 ;多. gn 影响 图;非对称多. g n 影响图;策 略;效用 A et A et
Re e e a o n l to f y m e r c Ga e pr s nt t n a d So u n o As m i i t i m s
一
的一种新 的图形博弈模型一非对称多. gn A et影响图,
并给 出具体 的算法求解 。
些更为简洁有 效的博弈表示模型 。 a r 于 2 0 PL a 0 0 Mu
年 提 出了博弈 网,是一种更加结构化和更加压缩 的图
形 表示模 型 。M.ers等于 2 0 K an 0 1年首先提出 了用图 形 博弈模 型来描述含 多个 Agns的静态 完全信 息博 et 弈 。Kol lr和 Mi h给 出的多. g n 影 响图是对 贝叶 e l c A et 斯 网和 影响 图的扩展 ,它能够表 示最复杂的动态不完 全信息博弈 。但 多. g n A et影响图存在这样一个 问题 : 当博弈是 非对称结构 的时候 ,博弈树 能 以很 自然 的方 式将非对称 性简洁的表 示出来 ,而多. et 响图表 Agn 影 示非对称 性却非常 的困难,一 个简 单的非对称博弈都 有可能导致表 示 的爆炸 。针对上述 问题 ,我们借鉴 了 单- e t Ag n 决策 系统中对 非对称 性表示 的方法 ,将 非对
非对称特征值问题 6-3剖析
例 设A∈R4×4有特征值
i 15 j ( j 1,2,3,4),
比值r=|λ2/λ1|≈0.9. 做变换 B=A-12I (p=12),
则B的特征值为
1 2, 2 1, 3 0, 4 1.
应用幂法计算B的主特征值μ1的收敛速度的比值为
2 2 p 0.5 2 0.9.
1 1 p
我们将瑞利商应用到用幂法计算实对称矩阵A的主特征值的 加速上来.
定理 设A∈Rn×n为对称矩阵,特征值满足
1 2 n1 n ,
对应的特征向量vi满足(vi, vj)=δij (单位正交向量) ,应用幂法
公式计算A的主特征值1,则
R xk
Axk , xk xk , xk
1
2 1
2k
由此可见,R(xk) 更快的收敛于1.
证明
xk
Ak x0 max( Ak x0 )
,
yk 1
Axk
Ak x0 max( Ak
x0
)
,
得
R(xk )
( Axk , xk ) ( xk , xk )
( Ak1x0, Ak x0 ) ( Ak x0, Ak x0 )
n
a2 2k 1 jj
j 1
pI)1存在,则可以用反幂法求(A pI)1的
主特征根 1/(i p ) ,收敛将非常快。
2、对称矩阵的Rayleigh商加速
设A∈Rn×n为对称矩阵,称
R( x) ( Ax, x) . (x, x)
为向量x的瑞利商,其中(x, x)=xTx为内积. 由定理11知道,
实对称矩阵A的特征值1及n可用瑞利商的极限值表示. 下面
第三节 加速方法
1、原点平移法
非对称实矩阵合同的条件
( C )不相 似但 合 同
两个 矩 阵的 特征值 相 同 , 容 易错 用实 对称 矩 阵合 同 的判 定 条件 得 到 A 与 合 同 ( 一 个 实对 称 矩 阵
不能 合 同与一 个非 对称 实矩 阵 ) . 由此 , 学 生经 常提 问 : 合 同关 系 是否 只存 在 于两个 实对 称矩 阵之 间? 两 个非 对称 实矩 阵是 否可 以合 同?如何 判定 ? 为 了 回答 以上 问题 , 本 文在工 科 线性代 数 的知 识 范畴 内 , 给 出 了对称 部分 是正 定矩 阵 的两个 非对 称
『 L - ] 满 足 P P — B . 简 单 计 算 之 后 , 得 到 I P I 一 一 一 3 , 但 是 在 p r A p 一 . B 两 边 同 时 取 行
C J
列 式 得 到 导 = = : 1 , 矛 盾 .
3 两 个 非 对 称 实 矩 阵合 同 的 一个 判 定 定 理
第 3 1卷 第 4期
2 0 1 5年 8 月
大 学 数 学
CO LLEGE M A T H EM A T I CS
Vo 1 . 3 1 , № . 4
Au g. 2 01 5
非 对 称 实 矩 阵 合 同 的条 件
李 成 博 , 胡 志广 。, 詹华英。
( 1 . 天津大学 理学院数学系 , 天津 3 0 0 0 7 2 ;2 . 天津师范大学 数学科学学 院 , 天津 3 0 0 3 8 7 ; 3 . 天 津 理 工大 学 理学 院 数 学 系 ,天 津 3 0 0 3 8 4 )
实矩 阵合 同的一个 充分 条件 , 并举 例 做具 体说 明.
2 合 同 的 一 个 必 要 条 件
幂法求特征值
幂法求特征值幂法求特征值是数值线性代数中最常见最重要的一种数值解法,它基于一类非对称矩阵求解方程的特征根以及相应的特征值。
为了求解非对称矩阵,需要进行一定的数值计算,可以使用幂法来求解。
幂法求特征值多用于工程中,可以实现对数值线性系统的迭代解法。
二、原理幂法求特征值是一种迭代法,也就是说,它是非对称矩阵特征值求解的迭代方法。
与快速特征分解(QR分解)相比,幂法求特征值的收敛速度更快,而且无需进行矩阵的分解,也不需要计算特征向量。
幂法求特征值的基本思想是以矩阵A的特征值λ等于矩阵A的本征矢向量的倍数的特殊性质为基础,通过迭代的方法,不断改变矩阵A的本征矢向量,最终收敛得到特征根和特征值。
首先,我们将定义一个矩阵A,矩阵A可以表示为:A= [a_{ij}]quad i,j=1,2,...,n其中,a_{ij}为矩阵A的系数,n为矩阵A的行数和列数。
然后,定义一个向量x,使x不为零向量,即:xeq0最后,定义一个参数κ,κ表示一个实数,表示迭代次数。
三、算法步骤(1)求解方程Ax=κ x,得到特征根κ;(2)利用矩阵A的性质,计算特征矩阵B,即B=A-κI,其中I是n阶单位矩阵;(3)计算向量x,利用Bx=0,求解出新的本征矢向量x;(4)重复第一步到第三步,直到本征矢x收敛,即误差ε≤阈值,最终求得特征根κ和特征矢x;(5)根据本征矩阵A=A-κI计算出特征值λ=κ,就可以得到矩阵A的特征根和特征值。
四、应用幂法求特征值在各种工程事件中有着广泛的应用,常用于求解大规模的线性系统,离散数学和最优化问题等。
比如,在金融工程和数值分析中,可以使用它来求解矩阵改变后值的解法,如果只是简单的改变矩阵,也能简捷而准确地求解出它的特征值。
幂法求特征值还常用于管理和工程类问题,例如,可以用它来有效地衡量系统中不同组件之间的关系,识别贡献者和参与者之间的影响力大小,进而更好地解决复杂的问题。
五、优势幂法求特征值的优势在于多方面。
视觉搜索中的非对称性
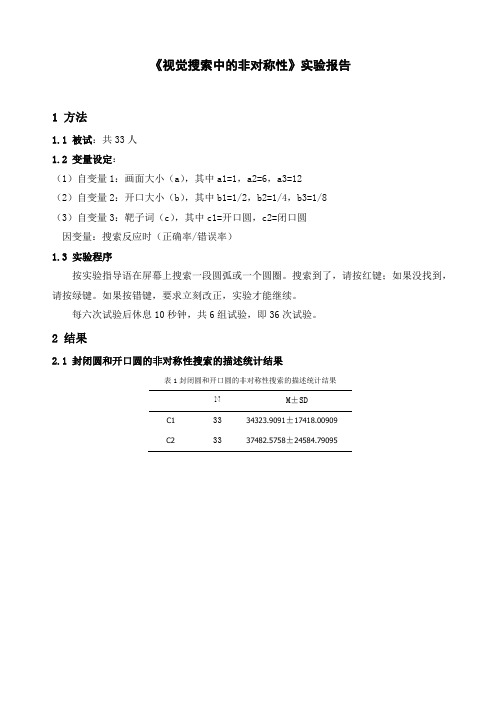
《视觉搜索中的非对称性》实验报告1 方法1.1 被试:共33人1.2 变量设定:(1)自变量1:画面大小(a),其中a1=1,a2=6,a3=12(2)自变量2:开口大小(b),其中b1=1/2,b2=1/4,b3=1/8(3)自变量3:靶子词(c),其中c1=开口圆,c2=闭口圆因变量:搜索反应时(正确率/错误率)1.3 实验程序按实验指导语在屏幕上搜索一段圆弧或一个圆圈。
搜索到了,请按红键;如果没找到,请按绿键。
如果按错键,要求立刻改正,实验才能继续。
每六次试验后休息10秒钟,共6组试验,即36次试验。
2 结果2.1 封闭圆和开口圆的非对称性搜索的描述统计结果表1封闭圆和开口圆的非对称性搜索的描述统计结果N M±SDC133 34323.9091±17418.00909C233 37482.5758±24584.790952.2 封闭圆和开口圆分别作为靶子词,搜索时间是否有差异?没有差异。
刺激项目C的主效应不显著,见表2表2 自变量的交互效应及主效应分析变量均值 F Sig.A * C 40200587.215 2.173 .122B *C 46497333.539 3.233 .046C 9145743.852 .698 .410A 7233526.084 .513 .601B 38165919.357 2.186 .1212.3 对不同靶子词搜索时间的差异是否受到画面大小的影响?不受影响。
画面大小A和刺激项目C的交互效应不显著。
2.4 对不同靶子词搜索时间的差异是否受到开口大小的影响?受影响。
刺激项目C和开口大小B的交互效应显著。
3 讨论3.1 不同靶子词的搜索反应时是否有差异,说明了什么问题?是否说明存在非对称性搜索?没有差异,不能说明存在非对称性搜索。
影响视觉搜索非对称的因素之一是视觉材料的熟悉性,被试对刺激项目的视觉模式很熟悉,所以可能没出现非对称性现象。
33 正交变换法
由于 1 2
n . 当k充分大时,便有
rk u (pk ) max u (jk ) 1 ,
1 j n
而且,x(k)也会趋于y1.很明显,当 1 / 2 1 时,收敛 的速度会很快,而当σ ≈1时收敛缓慢.
定理6.2.1 设矩阵A有p个互不相同的特征值满足 1 2 n . 并且λ1是半单的.如果初始向量x(0)在λ1的特征子空间上的投 影不为零,则由幂法产生的向量序列{x(k)}收敛到λ1的一个特 征向量y1,而且幂法产生的数值序列{rk}收敛到λ1.
P 1 AP diag J (1 ), J (2 ), , J (r ) ,
k J (k )
ห้องสมุดไป่ตู้
1
k
C n ( k )n ( k ) , k 1,2, 1 k
, r.
定理6.1.2 (Schur分解定理) 设A是n阶方阵,则存在酉矩阵 U C nn , 使得 * U AU T , 其中T是上三角阵;而且适当选取U,可使T的对角元按任意 指定的顺序排列. 该定理无论在理论上还是在实际应用上都是非常重要 的,著名的QR方法就是基于这一定理而设计的. 定理6.1.3 (Gerschgorin圆盘定理) 令
一个不符合定理6.2.1条件的矩阵,用幂法迭代收敛性分 析就变得非常复杂,这时可能有若干个收敛于不同特征 向量的子序列.例如,假设A=XDX-1,其中
1 0 X 1 1
0.6 0.4 0.4 0.6 X 1 0.4 0.4 0.6 0.4
第六章 非对称特征值问题的算法
•预备知识 •幂法 •反幂法 •QR方法
6.1 预备知识
非对称实矩阵合同的条件
非对称实矩阵合同的条件李成博;胡志广;詹华英【摘要】在工科大学的线性代数课程的知识范畴内,给出了一类非对称实矩阵的合同的判定的一个充分条件,并举例做具体说明;此项研究回答了工科大学生在学习矩阵合同理论时经常提出的一个疑问,可以作为工科大学线性代数教学的一个合理的补充材料.【期刊名称】《大学数学》【年(卷),期】2015(031)004【总页数】4页(P79-82)【关键词】非对称实矩阵;合同;正定实矩阵;对角化【作者】李成博;胡志广;詹华英【作者单位】天津大学理学院数学系,天津300072;天津师范大学数学科学学院,天津300387;天津理工大学理学院数学系,天津300384【正文语种】中文【中图分类】O13众所周知,两个同阶实对称矩阵实合同(以下简称合同)当且仅当它们的正负惯性指数分别相等,或者说当且仅当它们的正、负特征值的个数分别相等.在第一作者给天津大学的本科生讲授线性代数课程的过程中,会经常讲到下面这个习题:设则A与B________.(A) 相似且合同(B) 相似但不合同(C) 不相似但合同(D) 不相似且不合同两个矩阵的特征值相同,容易错用实对称矩阵合同的判定条件得到A与B合同(一个实对称矩阵不能合同与一个非对称实矩阵).由此,学生经常提问:合同关系是否只存在于两个实对称矩阵之间?两个非对称实矩阵是否可以合同?如何判定?为了回答以上问题,本文在工科线性代数的知识范畴内,给出了对称部分是正定矩阵的两个非对称实矩阵合同的一个充分条件,并举例做具体说明.设n阶实方阵A,B都是非对称的,即A≠AT,B≠BT,其中上标T表示方阵的转置.并记As,Aas为矩阵A的对称和反对称部分,即类似的,也用Bs,Bas表示矩阵B的对称和反对称部分.为了叙述简单,用记号A≃B表示矩阵A与B合同.定理1 若A≃B,则As≃Bs.这个定理可以用来判定两个非对称实矩阵不合同.例.因为As=的特征值是的特征值是-3,-3,6,所以As与Bs不合同,从而由定理1知A 与B不合同.下面的例子说明定理1的逆命题不成立.例与.因为As=的特征值是-1,3,Bs=的特征值是-2,4,所以As与Bs合同.但是,A与B 不合同,若不然,可以找到可逆矩阵.P=满足PTAP=B.简单计算之后,得到,但是在PTAP=B两边同时取行列式得到,矛盾.如前,设A,B都是非对称的n阶实矩阵并进一步假设As是正定的.若A≃B,则由定理1得Bs正定.由此,不妨也假设Bs正定.下面讨论A≃B成立的充分条件.为此,需要用到下面的定理.定理2[1] 设M是n阶实正定矩阵,N是n阶实对称矩阵则存在可逆矩阵P满足其中λ1,λ2,…,λn是实数.定理3 设可逆矩阵P满足其中每个λi>0.若则证综合已知条件,有这就证明定理的结论.为方便起见,给出应用定理3来判断非对称实矩阵合同的主要步骤(其合理性请参看后面的定理4).第一步求解一元n次方程组|Bs-λAs|=0,得到n个正实根λ1,λ2,…,λn.第二步对每一个λi(相同的λi只计算一次即可),求解线性方程组(Bs-λiAs)X=0,得到通解的表达式.第三步对第二步中的每一个线性方程组,可以选取合适的基础解系并把这些基础解系中的向量作为列向量组成一个n阶方阵P,使得第四步验证是否成立.如果成立,则得到A≃B.例3 判断矩阵A=与相合.解写出两个矩阵的对称和反对称部分首先,求解=0,得.然后,求得线性方程组和的通解分别是和.从而,可以设矩阵,因为PTAsP=En,可以取,此时也有最后,容易验证所以,由定理3得矩阵A与B相合.(i) 两个非对称实矩阵A,B合同的一个等价刻画是它们的对称部分As,Bs和反对称部分Aas,Bas同步合同,即存在(同一个)可逆矩阵P,使得这个问题不同于实对称矩阵的合同,难度大,还没有十分满意的结果.本文的目的不是给出非对称矩阵合同的深入完整的研究,而是像本文开始提到的那样,在工科大学的线性代数课程的知识范畴内,给出相对容易的一个合同的判定定理并举出实例,希望可以作为工科大学生学习实对称矩阵合同理论的一个补充材料.(ii) 当对称部分As,Bs都正定时,可以分别做满秩线性替换X=P1Y,X=P2Y,使得不妨从一开始就假设As=Bs=En,也就是说,所以,理论上来说,判断A,B合同的问题化为了Aas,Bas(正交)合同的问题.而由正规实矩阵的结论,两个反对称矩阵(正交)合同当且仅当特征多项式相同[2]. (iii) 下面这个定理保证了前面提到的应用定理3来判断非对称矩阵合同的步骤中第一步和第三步总是可以实施的.定理4 设A是正定矩阵,B是实对称矩阵,则存在可逆矩阵P=[X1,X2,…,Xn]满足其中λ1,λ2,…,λn是实数,且PTAP=En,PTB P=diag(λ1,λ2,…,λn).证设A=STS,则因为实对称矩阵的特征值都是实数,得到|B-λA|=0有n个实根,设为λ1,λ2,…,λn.对于任一个λi,考虑其对应的线性方程组(B-λiA)X=0,由实二次型理论(或者用施密特正交化方法)可以选取一个基础解系Xi1,Xi2,…,Xik,满足而对于两个不同的λi,λj,任取X,Y分别为线性方程组的解,则这样取得的解向量组成矩阵P,即是定理中要求的矩阵.【相关文献】[1] 天津大学数学系代数教研组.线性代数及其应用[M].北京:科学出版社,2010:253-254.[2] 孟道骥.高等代数与解析几何(下)[M].北京:科学出版社,2010.。
特征值估计和表示

则称A按列(弱)对角占优。
文档仅供参考,如有不当之处,请联系改正。
二、特征值旳包括区域
1. 定义5.3 设A=(aij)Cn×n,称区域 Gi: |z-aii|Ri 为 矩阵A旳第i个盖尔圆,其中 Ri=ji|aij| 称为盖尔 圆Gi旳半径(i=l,…,n)。
向量系x1,…,xn称为按B原则正交化向量系。 2. 按B原则正交化向量系旳性质: • 性质1 xj0 (j=1, 2, …, n) (j=1,…,n); • 性质2 x1,…, xn线性无关。
文档仅供参考,如有不当之处,请联系改正。
§5.3 对称矩阵特征值旳极性
一、实对称矩阵旳Rayleigh商旳极性
Ax
|
x
Vk
,
||
x
||2
1}
k
文档仅供参考,如有不当之处,请联系改正。
二、广义特征值旳极小极大原理
1. 定义 :设A,B为n阶实对称矩阵,且B正定, xRn.称R(x)=(xTAx)/(xTBx), x0为矩阵A相对 于矩阵B旳广义Rayleigh商. .
2. 广义Rayleigh商能够只在椭球面SB={x|xRn, xTBx =1}上讨论。
j 1
|2
2
|
j
|
max
1i, jn
|
aij
|
n
2
n
|| B ||m
文档仅供参考,如有不当之处,请联系改正。
4. 定理5.2:设ACn×n,则A旳任一特征值 满足 (1) ||||A||m (2) |Re()|0.5||A+AH||m (3) |Im()| 0.5||A-AH||m。
箭状矩阵行列式
根据布尔巴基学派 [1] 的观点,我们现在知道对于数的刻画,一方面需要研究 其代数结构,比如:数的代数运算性质(加、减、乘、除等运算),以及自然数 半群、整数环、有理数域、实数域、复数域、乃至四元数域;一方面需要研究其 拓扑结构,也可以说是其分析性质,比如:数的逼近性质,实数系的完备性和连 续性,函数的连续、微分和积分等;另一方面,数的序结构在初等数学中也起着 重要的作用,数之间的大小比较及相关的不等式是初等数学中的重要研究课题, 甚至是历年高考中的必考内容。
i 1,, n 1
,
n1
a1 ( bi xi1 ) / x1 i 1
n1
a1 u ( bi yi1) / y1 . i 1
(2.13) (2.14)
(2.15)
(ii) xT
第7页(共13页)
3 非对称箭状矩阵
3.1 非对称箭状矩阵的特征值
下面讨论箭状矩阵特征值的性质,矩阵 A 的特征多项式为
bi
( u)xi1 yi1 x1 yi1 y1xi1
0, i
1,, k
1.
ai1
ux1 yi1 x1 yi1
y1xi1 y1 xi 1
,i
1,,
k
1.
由方程(2.2)得
k -1
n1
a1 ( bi xi1 bi xi1) / x1 .
i 1
ik
由方程(2.5),得到
k 1
a1 u ( bi yi1) / y1 . i 1
1
yT
特征值问题有限元方法

特征值问题有限元方法一、选择题(每题3分,共10题)1. 有限元方法求解特征值问题时,首先要()A. 构建刚度矩阵和质量矩阵。
B. 直接求解特征方程。
C. 确定边界条件。
D. 离散化几何区域。
解析:在有限元方法求解特征值问题时,首先要对几何区域进行离散化,将其划分为有限个单元,然后才能构建刚度矩阵和质量矩阵等后续操作。
所以答案是D。
2. 对于二维弹性体的特征值问题,其特征值代表()A. 结构的固有频率。
B. 结构的应力大小。
C. 单元的节点位移。
D. 材料的弹性模量。
解析:在二维弹性体的特征值问题中,特征值代表结构的固有频率。
应力大小与求解过程有关但不是特征值的意义,节点位移是求解的变量,弹性模量是材料属性。
所以答案是A。
3. 有限元法中,质量矩阵的形成方式不包括()A. 集中质量法。
B. 一致质量法。
C. 对角质量法。
D. 混合质量法。
解析:有限元法中质量矩阵的形成有集中质量法和一致质量法,没有所谓的对角质量法这种单独的形成方式(对角质量矩阵是集中质量法的结果),混合质量法也不是常规的质量矩阵形成方式。
所以答案是C。
4. 在有限元求解特征值问题中,刚度矩阵是()A. 对称正定矩阵。
B. 对称负定矩阵。
C. 非对称矩阵。
D. 奇异矩阵。
解析:刚度矩阵是对称正定矩阵。
它反映了结构的刚度特性,在有限元求解特征值问题等多种结构分析中具有重要意义。
所以答案是A。
5. 设特征值问题有限元方程为Kφ=λ Mφ,其中K为刚度矩阵,M为质量矩阵,λ为特征值,φ为特征向量。
若增大结构的刚度,特征值将()A. 增大。
B. 减小。
C. 不变。
D. 无法确定。
解析:从方程Kφ=λ Mφ来看,刚度矩阵K增大时,在质量矩阵M不变的情况下,特征值λ会增大。
所以答案是A。
6. 有限元求解特征值问题时,单元插值函数的作用是()A. 确定单元内的场变量分布。
B. 计算单元刚度矩阵。
C. 计算单元质量矩阵。
D. 以上都是。
解析:单元插值函数可以确定单元内的场变量分布,进而用于计算单元刚度矩阵和单元质量矩阵等。
含非局部边界条件的奇异特征值问题的正解
( De p a r t me n t o f Ma t h e ma t i c s , N i n g b o Un i v e r s i t y , N i n g b o 3 1 5 2 1 1 , C h i n a )
l i ne a r o pe r a t n— Ru t ma n t he o r e m .Th e n, c o mbi n i n g wi t h t he i f xe d p o i nt
收稿 日期: 2 0 1 5 — 1 2 — 1 1 基金项 目: 国家 自然科 学基金 ( 1 1 2 0 1 2 4 8 ) ; 浙江省 自然科学基金 ( L Y1 7 A0 1 0 0 0 7 ) ; 宁波市 自然科学基金
第1 8 卷第 4 期 2 0 1 6 年1 2 月
应用泛 函分析学报
ACTA ANALYS I S FUNCT1 0NALI S APPLI CATA
、 厂 0 1 . 1 8 . NO . 4 De c . , 2 0 1 6
D O I : 1 0 . 1 2 o 1 2 / l o o 9 — 1 3 2 7 ( 2 0 1 6 ) 0 4 - 0 3 6 9 — 0 9
( 2 0 1 6 A 6 1 0 0 7 3 )
作者简介:胡 良根 ( 1 9 7 7 - ) , 男, 汉, 江西 临川人, 博士, 副教授, 研究方 向:非线性泛 函分析、椭 圆方程,
E— ma i l :h ul i a ng g e n@t om . c o n. r
3 7 0
非对称矩阵的特征值问题

12/78
RQI 算法的收敛性
一般来说, 如果 Rayleigh 商迭代收敛到 A 的一个单特征值, 则至少是二 次收敛的, 即具有局部二次收敛性. 如果 A 是对称的, 则能达到局部三 次收敛, 详情见后面的对称特征值问题.
缺点: 由于每次迭代的位移是不同的, 因此每次迭代需要求解一个不同的线性 方程组, 这使得运算量大大增加. 因此通常应用于 三对角矩阵 的特征值计算.
k→∞
Ak x(0)
α1 λk 1 α2 λk . 2 . . αn λk n
又 |λi /λ1 | < 1, i = 2, 3, . . . , n, 所以 lim λi λ1 )k = 0, i = 2, 3, . . . , n.
6/78
故当 k 趋向于无穷大时, 向量 [ ( )k ( )k ] α2 λ2 αn λn , 1, , ..., α1 λ1 α1 λ1 收敛到 e1 = [1, 0, . . . , 0] .
17/78
说明: 如果 A 不可对角化, 利用 Jordan 标准型, 可以到同样的结论, 见 [Watkins 2007, Watkins-Elsner 1991].
† 在正交迭代中, 如果我们取 Z0 = I , 则可得到一类特殊的正交迭代算 法. 此时, 在一定条件下, 正交迭代会收敛到 A 的 Schur 标准型.
13/78
3
正交迭代
出发点: 同时计算多个特征值/特征向量 策略: 同时采用多个初始向量, 希望收敛到 A 的一个不变子空间
算法 3.1 正交迭代算法 (Orthogonal Iteration)
1: 2: 3: 4: 5: 6: 7:
非对称矩阵和复矩阵特征值

非对称矩阵和复矩阵特征值一、非对称矩阵非对称矩阵是指矩阵的转置与自身不相等的矩阵。
具体来说,如果一个矩阵A满足 A ≠ AT,就称之为非对称矩阵。
在非对称矩阵中,对角线上的元素可以是任意值,而非对角线上的元素有一定的规律。
非对称矩阵的特点是具有不对称性,即Aij ≠ Aji。
这表示矩阵中的元素在主对角线两侧并不相等。
非对称矩阵在数学和物理中有广泛的应用,比如在线性代数、微分方程、动力系统等领域。
二、复矩阵特征值复矩阵特征值是指复数域上的矩阵的特征值。
矩阵的特征值是指满足方程Ax = λx的数λ,其中A是一个n阶矩阵,x是一个n维非零向量,λ是一个标量。
特征值的求解是矩阵理论中的重要问题之一。
对于复矩阵,特征值可以是实数,也可以是复数。
特征值与特征向量之间存在着密切的关系,特征向量是与特征值对应的非零向量。
特征值和特征向量的求解可以通过求解特征方程来实现,特征方程是由矩阵的特征值定义的。
复矩阵特征值的应用广泛,比如在量子力学中,一个系统的特征值可以表示系统的能量,特征向量可以表示系统的态。
在图像处理和模式识别中,特征值和特征向量可以用来描述图像的特征和模式。
三、非对称矩阵的复特征值对于非对称矩阵,其特征值可以是复数。
非对称矩阵的复特征值和复特征向量的求解是一个复杂的数学问题,在实际应用中需要借助数值计算方法来求解。
非对称矩阵的复特征值和复特征向量的求解可以通过矩阵的特征多项式来实现。
特征多项式是由矩阵的特征值定义的,通过求解特征多项式的根,可以得到矩阵的复特征值。
非对称矩阵的复特征值在物理和工程领域有着重要的应用。
比如在电路分析中,非对称矩阵可以描述复杂的电路网络,而复特征值可以用来描述电路的稳定性和响应特性。
四、小结非对称矩阵和复矩阵特征值是数学和物理领域中的重要概念。
非对称矩阵具有不对称性,其特征值的求解是一个重要的数学问题。
复矩阵特征值可以是实数也可以是复数,其求解方法需要借助特征方程和特征多项式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 反迭代
用幂迭代求 A−1 的模最小特征值, 这就是反迭代
算法 2.1 反迭代算法 (Inverse Iteration)
1: Choose a scalar σ and an initial vector x(0) with ∥x(0)∥2 = 1 2: set k = 0
Numerical Methods for Solving Large Scale Eigenvalue Problems, 2018. (该课程的主页)
1 幂迭代
幂迭代 是计算特征值和特征向量的一种简单易用的算法. 虽然简单, 但它却建立了计算特征值和特征向量的算法的一个基本框架.
算法 1.1 幂迭代算法 (Power Iteration)
• 幂迭代只能用于计算 (模) 最大的特征值和其相应的特征向量. • 当 |λ2/λ1| 接近于 1 时, 收敛速度会非常慢. • 如果模最大的特征值是一对共轭复数, 则幂迭代可能会失效.
7/78
加速技巧: 位移策略
出发点: 加快幂迭代算法的收敛速度 ⇐⇒ 尽可能地减小 |λ2/λ1| 位移策略 (shift): 计算 A − σI 的特征值
% 内积
7: k = k + 1
8: end while
4/78
幂迭代的收敛性
假设 1: A ∈ Rn×n 可对角化, 即 A = V ΛV −1, 其中 Λ = diag(λ1, . . . , λn), V = [v1, . . . , vn] ∈ Cn×n, ∥vi∥2 = 1
假设 2: |λ1| > |λ2| ≥ |λ3| ≥ · · · ≥ |λn|.
† 理论上, 反迭代 + 位移策略, 可以计算矩阵的任意一个特征值
优点: • 若 σ 与某个特征值 λk 非常接近, 则反迭代算法的收敛速度非常快. • 只要选取合适的位移 σ, 就可以计算 A 的任意一个特征值.
我们称 σ 为位移 (shift), 满足
(1) λ1 − σ 是 A − σI 的模最大的特征值;
(2) max
2≤i≤n
λi − σ λ1 − σ
尽可能地小.
其中第一个条件保证最后所求得的特征值是我们所要的, 第二个条件用
于加快幂迭代的收敛速度.
缺点: (1) σ 很难选取; (2) 加速效果有限
本讲主要讨论如何计算 A 的全部特征值和/或特征向量.
主要介绍以下方法:
• 幂迭代方法 • 反迭代方法(位移策略,Rayleigh 商迭代) • 正交迭代方法 • QR 方法
2/78
关于稠密矩阵特征值计算的参考资料有:
• J. H. Wilkinson, The Algebraic Eigenvalue Problem, 1965 • B. N. ParlProblem, 2nd Eds., 1998 • G. W. Stewart, Matrix Algorithms, Vol II: Eigensystems, 2001 • G. H. Golub and C. F. Van Loan, Matrix Computations, 2013 • P. Arbenz, The course 252-0504-00 G,
5/78
于是我们可得
Ak x(0)
=
(V
ΛV −1)kV
α1 α...2
=
V Λk
α1 α...2
=
V
α1λk1
α2λk2 ...
αn
αn
1
=
α1λk1 V
α2 α1
αn
( λ2
λ1 (...
λn
1: Choose an initial guess x(0) with ∥x(0)∥2 = 1 2: set k = 0
3: while not convergence do
4:
y(k+1) = Ax(k)
5:
x(k+1) = y(k+1)/∥y(k+1)∥2
6:
µk+1 = (x(k+1), Ax(k+1))
α1 λ1
α1 λ1
k = 0, 1, 2, . . .
收敛到 e1 = [1, 0, . . . , 0]⊺. 所以向量 x(k) = Akx(0)/∥Akx(0)∥2 收敛到 ±v1, 即 λ1 的特征向量. 而 µk = (x(k))∗Ax(k) 则收敛到 v1∗Av1 = λ1.
† 幂迭代的收敛快慢取决于 |λ2/λ1| 的大小, |λ2/λ1| 越小, 收敛越快.
)k )k
.
α1 λ1
αnλkn
又 |λi/λ1| < 1, i = 2, 3, . . . , n, 所以
lim ( λi )k = 0, i = 2, 3, . . . , n. k→∞ λ1
6/78
故当 k 趋向于无穷大时, 向量
[ 1,
α2
( λ2 )k ,
...,
αn
( λn )k]⊺ ,
由于 V 的列向量组构成 Cn 的一组基, 因此 x(0) 可表示为 x(0) = α1v1 + α2v2 + · · · + αnvn = V [α1, α2, . . . , αn]⊺.
我们假定 α1 ̸= 0, 即 x(0) 不属于 span{v2, v3, . . . , vn} (由于 x(0) 是随机选取的, 从概率意义上讲, 这个假设通常是成立的).
第四讲 非对称特征值问题
1 幂迭代 2 反迭代 3 正交迭代 4 QR 迭代 5 带位移的隐式 QR 迭代 6 特征向量的计算 7 广义特征值问题 8 应用:多项式求根
非对称矩阵特征值/特征向量的计算
基本约定 1: A ∈ Rn×n 、 非对称 、 稠密 基本约定 2: |λ1| ≥ |λ2| ≥ · · · ≥ |λn| ≥ 0
3: while not convergence do
4:
y(k+1) = (A − σI)−1x(k)
5:
x(k+1) = y(k+1)/∥y(k+1)∥2
6:
µk+1 = (x(k+1), Ax(k+1))
7: σ = µk+1, k = k + 1
8: end while
显然: µk 收敛到距离 σ 最近的特征值, x(k) 收敛到对应的特征向量 9/78