12自动化计算机控制系统课程设计题目分配
计算机控制系统课程设计--- 最少拍控制系统设计
能源与动力工程学院课程设计报告题目:最少拍控制系统设计课程:计算机控制技术课程设计专业:电气工程及其自动化班级:电气0902 姓名:孙威学号: 091302224第一部分任务书《计算机控制技术》课程设计任务书一、课题名称最少拍控制系统设计二、课程设计目的课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。
《计算机控制技术》是一门理论性、实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。
计算机控制技术的课程设计是一个综合运用知识的过程,它需要控制理论、程序设计、硬件电路设计等方面的知识融合。
通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。
三、课程设计内容设计以89C51单片机和ADC 、DAC 等电路、由运放电路实现的被控对象构成的计算机单闭环反馈控制系统。
1. 硬件电路设计:89C51最小系统加上模入电路(用ADC0809等)和模出电路(用TLC7528和运放等);由运放实现的被控对象。
2. 控制算法:最少拍控制。
3. 软件设计:主程序、中断程序、A/D 转换程序、滤波程序、最少拍控制程序、D/A 输出程序等。
四、课程设计要求1. 模入电路能接受双极性电压输入(-5V~+5V ),模出电路能输出双极性电压(-5V~+5V )。
2. 模入电路用两个通道分别采集被控对象的输出和给定信号。
3. 每个同学选择不同的被控对象:510(),()(1)(0.81)(1)(0.41)G s G s s s s s ==++++ 45(),()(0.41)(0.81)G s G s s s s s ==++ 58(),()(1)(0.21)(0.81)(0.21)G s G s s s s s s s ==++++55(),()(0.81)(0.31)(0.81)(0.21)G s G s s s s s ==++++4. 设计无纹波最少拍控制器。
计算机控制课程设计题目

《计算机控制》课程设计一、课程设计要求1.1 方案设计:1)完成控制系统的分析、设计;2)选择元器件,完成电路设计,控制器采用MCS-51系列单片机(传感器、功率接口以及人机接口等自行设计),使用Protel绘制原理图;3)编程实现单片机上的控制算法,并上机调试。
1.2 报告内容:1)控制系统仿真和设计步骤,应包含性能曲线、采样周期的选择、数字控制器的脉冲传递函数和差分方程;2)元器件选型,电路设计,以及绘制的Protel原理图;3)软件流程图,以及含有详细注释的源程序,运行结果;4)设计工作总结及心得体会;5)列出所查阅的参考资料。
二、报告要求1)每人提交一份打印的报告(A4纸,上侧两钉装订)。
2)报告要采用统一的封面和设计任务书(格式见附录)。
3)报告内容要求见设计任务书,其中原理图应至少包括单片机、AD和DA部分,源程序采用C或者汇编语言编写均可。
4)报告中,各节标题用小三宋体加粗排版,正文字号用小四宋体排版,1.5倍行距。
公式用公式编辑器输入,流程图用Visio绘制,注意开始、结束、分支、判断等要采用标准图示方法。
注意调整图的大小以节约版面和保持美观,以能看清楚最小的文字和符号为准。
程序代码用五号字体排版。
三、时间安排6.28~7.3号,前期理论分析、查阅文献、设计7.4~8号,画原理图、上机编程、仿真,实验室地点H405验收时间:7月9日8:00 H405四、注意事项1)课程设计上机时间考核出勤,需要签到。
可以自己带笔记本电脑到实验室做课程设计。
2)验收时除了报告外,还应该提供和报告中一致的设计资料、Protel图、程序代码、MATLAB绘制的响应曲线和频率特性曲线等资料和数据。
3)对于周期T的选择、单片机和A/D、D/A等的型号选择有说明。
. 考虑算法编排结构。
考虑单片机定时、单片机A/D、D/A操作等的实现方法。
五、附录附录一计算机控制课程设计题目附录二报告封面格式附录三设计任务书格式附录一 计算机控制课程设计题目1、超前校正控制器设计设单位反馈系统的开环传递函数为)1()(0+=s s Ks G ,采用模拟设计法设计超前校正数字控制器,使校正后的系统满足如下指标:(1) 当t r =时,稳态误差不大于0.1;(2) 开环系统截止频率6≥c ωrad/s ;(3) 相角裕度o 60≥γ; (4) 幅值裕度10≥h dB 。
自动化10本 12升《计算机控制综合课程设计》任务书
《计算机控制综合课程设计》任务书一、设计目的和要求(一)目的通过计算机控制综合课程设计,学生应掌握计算机控制系统的设计原则、方法和步骤,熟悉相关计算机控制系统的硬件组成与设计方案,掌握常用传感器的使用方法,过程输入输出通道的设计应用,熟悉常用的控制算法和控制器的使用,掌握上位机监控软件以及组态软件的应用。
具有初步设计小型计算机监控系统的能力。
(二)要求计算机控制综合课程设计主要训练学生运用已学过的传感器、变送器、输入输出模块、运动驱动模块、工控计算机、可编程序控制器等相关的硬件,以及上位机监控程序设计软件(组态王、iFIX或力控等)和PLC编程软件等,完成水温、压力、电机转速等常用工业控制对象监控系统的硬件设计和上位机监控软件设计。
通过学生完整的设计一套基本的测控系统,使其受到自动化工程设计的基本训练,能够从事自动化工程的基本设计和维护工作。
具体如下:1.通过数据采集设备和输入输出通道电路的设计,锻炼学生对传感器、变送器、数据采集板卡、基本执行器等的参数设置与应用能力,以及硬件电路的设计能力;2.通过工控机和可编程序控制器等控制器的应用,训练学生控制器的基本应用与编程能力;3.通过一个工业控制对象的计算机监控界面的设计,锻炼学生系统配置、输入输出变量的定义,以及监控界面设计的基本能力。
4.通过控制算法的编程实现,训练学生掌握基本控制算法,并能通过程序设计进行实现。
5.通过一套完整的工业常用对象测控系统的设计、调试,以达到培养学生利用所学理论知识解决实际问题以及综合运用知识的能力。
二、设计内容及步骤(一)设计内容以下设计题目,每位同学任选一个,然后,指导教师根据设备情况再进行二次协商调配。
每个题目,学生在完成基本要求的设计内容的基础上,可以加入其他附加功能。
题目1:基于PCI板卡的锅炉温度监控系统的设计与实现利用PCI-1710板卡作为系统输入输出通道,采用铂电阻进行温度测量,用工控机实现锅炉水温的温度控制,要求进行上位机监控界面的设计,温度控制精度要求达到±5º,测量范围是0~100º。
现代控制系统综合课程设计指导书(12自动化)
信息与电气工程学院课程设计指导书课程设计名称:现代控制系统综合课程设计适用专业:12级自动化制订时间:2014.12.自动化工程系一、目的任务通过电气控制装置的设计实践,了解一般电气控制系统设计过程、设计要求、应完成的工作内容和具体设计方法。
通过设计也有助于复习、巩固以往所学的知识,达到灵活应用的目的。
PLC 设计必须满足生产设备和生产工艺的要求,因此,设计之前必须了解设备的用途、结构、操作要求和工艺过程,在此过程中培养从事设计工作的整体观念。
课程设计应强调能力培养为主,在独立完成设计任务的同时,还要注意其他几方面能力的培养与提高,如独立工作能力与创造力;综合运用专业及基础知识的能力,解决实际工程技术问题的能力;查阅图书资料、产品手册和各种工具书的能力;工程绘图的能力;书写技术报告和编制技术资料的能力。
二、设计内容1.基本原则(1)应能满足控制对象的工艺要求,保证能按工艺流程准确、可靠的工作。
(2)系统构成应力求简单、实用,系统易操作、调整,检修方便。
(3)设计合理,经济,能发挥PLC控制的优点。
2.基本步骤(1)工艺分析对一个控制系统进行设计之前,首先必须对控制对象进行调查,搞清楚控制对象的工艺要求、工作特点。
明确划分控制各个阶段的特点和各个阶段的转换条件,画出完整的功能图或控制流程图。
(2)机型选择机型选择包括功能选择、I/O点数确定和内存估计等内容。
(3)外部电路设计硬件部分的设计和配置包括外部电路设计、电气控制系统接线图、设计组件装置配图和外部电气原理图,并在此基础上设计制作电气控制柜、操作台,进行PLC的安装和配线。
PLC的外围电路包括I/O接口电路、电源电路和接地电路、执行电路(电动机、电磁阀等)的主电路和一些不经过PLC的控制、保护电路等。
(4)程序设计在进行硬件配置的同时,可同步进行PLC控制软件的设计工作,主要任务是根据控制要求抱工艺流程图转换成梯形图控制程序。
应在熟练掌握PLC指令系统的基础上,充分合理地应用PLC 指令,最大限度地发挥PLC控制的优点。
12级自动化专业计算机控制课设任务书及指导书

12级⾃动化专业计算机控制课设任务书及指导书12级⾃动化专业《计算机控制课程设计》任务书及指导书⼀、设计任务设计、调试⼀个具有温度检测、串⾏A/D、串⾏D/A和液晶显⽰温度值得⼀个温度控制系统,编写数字PID控制算法,观察控制参数对控制结果的影响⼆、设计⽬的1.通过实践进⼀步理解和掌握微机接⼝技术;2.掌握使⽤汇编及C语⾔开发单⽚机系统的⽅法;3.复习使⽤Protel制作电路板的技能;4.学会通过阅读相关器件的英⽂资料设计产品;5.进⼀步提⾼设计、调试基于单⽚机的计算机控制系统的能⼒。
三、设计内容本设计在Lab8000通⽤微控制器实验系统及由北京建筑⼤学研制的温度测量及控制扩展板上进⾏。
要求将温度检测产⽣的模拟量送⼊串⾏A/D转换器TLC549,转换得到的数字量送⼊CPU,经数字PID控制算法计算产⽣控制量,将控制量送⼊串⾏数模转换器LTC1446,控制发热元件,同时在液晶显⽰器显⽰温度值。
在设计和调试过程中要将设计中涉及的各部分逐个调试通过,然后再整体调试。
在逐个调试时,可使⽤⼀些模拟信号,例如在调试串⾏A/D时,可先将模拟量输⼊接⼀个电位器,由电位器模拟温度量输⼊;在调试D/A输出控制发热元件前,先⼿动通过电位器产⽣⼀个模拟量控制发热元件。
1.温度测量与控制电路系统使⽤集成电路温度传感器AD590作为测温器,AD590是AD公司⽣产的⼀种精度和线性度较好的双端集成温度传感器,其输出电流与绝对温度有关,对于电源电压从5-10V 变化只引起1A最⼤电流的变化或1摄⽒度等效误差。
图1 温度传感部分图1给出了⽤于获得正⽐于绝对温度的输出电流的基本温度敏感电路,当温度有了10℃的变化时输出电压变化为20mV,即该电路运放1脚电压随温度变化为2mV/℃。
AD590将温度变化量转换成电压值变化量,经过LM324⼀级跟随后输⼊到电压放⼤电路,放⼤后的信号输⼊到A/D转换器将模拟信号转换成数字信号,利⽤CPU采集并存储采集到的数据。
计算机控制系统题目(含答案)
n=v-j+q=2 对单位速度输入信号,选择
e (z)
1 (z)
v j
(1 ai z1 )(1
z 1 )q F1( z)
(1
z 1 )2 (1
f11z 1 )
i1
( z )
z
d
i1
(1 bi z 1 )F2 ( z)
(1
z 1 )( f21z 1
f 22 z 2 )
VOUT1 为单极性输出,若 D 为输入数字量,VREF 为基准参考电压,且为 n 位 D/A 转换器,则有
VOUT1
VREF
D 2n
VOUT2 为双极性输出,且可推导得到
VOUT2
(
R3 R1
VREF
R3 R2
VOUT1 )
VREF
(
D 2 n 1
1)
14、三相步进电机有哪几种工作方式?分别画出每种工作方式的各相通电顺序和电压波形图。(6 分)
步轨迹图,并标明进给方向和步数。[8 分]
(1) 插补计算过程如下表(4 分)
步数 偏差判别 坐标进给
偏差计算
坐标计算
终点判断
起点
F0=0
x0=0,y0=5
1
F0=0
-x
F1=F0-2x0+1=-9
x1=x0-1=4,y1=0
2
F1<0
+y
F2=F1+2y1+1=-8
x2=4,y2=y1+1=1
3
F2<0
对于三相步进电机则有单相三拍(简称单三拍)方式、双相三拍(简称双三拍)方式、三相六拍工作方式。 单三拍工作方式各相的通电顺序为:A→B→C→A→…,各相通电的电压波形:
计算机控制技术课程设计

计算机控制技术课程设计一、教学目标本课程旨在让学生了解和掌握计算机控制技术的基本原理和应用方法。
通过本课程的学习,学生将能够:1.知识目标:理解计算机控制技术的基本概念、原理和特点;熟悉计算机控制系统的组成和分类;掌握常见的计算机控制算法和应用。
2.技能目标:能够运用计算机控制技术解决实际问题;具备分析和设计简单计算机控制系统的的能力。
3.情感态度价值观目标:培养学生对计算机控制技术的兴趣和好奇心,提高学生运用科学技术解决实际问题的意识。
二、教学内容本课程的教学内容主要包括以下几个部分:1.计算机控制技术概述:计算机控制技术的起源、发展及其在各个领域的应用。
2.计算机控制系统的基本原理:模拟计算机控制系统、数字计算机控制系统、混合计算机控制系统。
3.计算机控制系统的组成:控制器、执行器、传感器、反馈元件等。
4.计算机控制算法:PID控制算法、模糊控制算法、神经网络控制算法等。
5.计算机控制技术的应用:工业自动化、交通运输、楼宇自动化等。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学:1.讲授法:通过讲解计算机控制技术的基本概念、原理和特点,使学生掌握相关知识。
2.案例分析法:分析实际案例,使学生更好地理解计算机控制技术的应用。
3.实验法:让学生动手进行实验,培养学生的实际操作能力和解决问题的能力。
4.讨论法:学生进行课堂讨论,激发学生的思考,提高学生的表达能力。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选用国内权威出版社出版的计算机控制技术教材。
2.参考书:提供相关的计算机控制技术参考书籍,供学生自主学习。
3.多媒体资料:制作课件、教学视频等,丰富教学手段,提高教学效果。
4.实验设备:准备计算机控制系统实验装置,让学生能够实际操作,加深对知识的理解。
五、教学评估为了全面、客观地评估学生的学习成果,本课程将采用以下评估方式:1.平时表现:通过课堂参与、提问、讨论等方式,评估学生的学习态度和积极性。
计算机控制系统课程设计
课程设计报告学生姓名:学号:学院: 自动化工程学院班级:题目: 计算机控制系统1 题目背景与意义1.1 设计背景在自动控制系统的实际工程中,经常需要检测被测对象的一些物理参数,如温度、流量、压力、速度等,这些参数都是模拟信号的形式。
它们要由传感器转换成电压信号,再经A/D转换器变换成计算机能够处理的信号。
同样,计算机控制外设,如电动调节阀、模拟调速系统时,就需要将计算机输出的数字信号经过D/A转换器变换成外设能接受的模拟信号。
本次《计算机控制系统》课程设计的目的就是让同学们在理论学习的基础上,通过完成一个涉及单片机A/D和D/A多种资源应用并具有综合功能的小系统目标板的设计与编程应用,使我们不但能够将课堂上学到的理论知识与实际应用结合起来,而且能够对电子电路、电子元器件、等方面的知识进一步加深认识,同时在系统设计、软件编程、相关仪器设备的使用技能等方面得到较全面的锻炼和提高。
帮助同学们增进对单片机的感性认识,加深对单片机理论方面的理解,从而更好的掌握单片机的内部功能模块的应用以及A/D和D/A功能的实现。
使学生了解和掌握单片机应用系统的软硬件设计过程、方法及实现,为以后设计和实现单片机应用系统打下良好基础。
1.2 设计意义通过设计此测控装置,加深对控制系统的理解,达到活学活用的目的。
理论结合实践,锻炼综合运用能力。
2 设计题目介绍2.1设计题目设计一个基于单片机的具有A/D和D/A功能的信号测控装置。
要求该信号测控装置能够接入典型传感器、变送器信号,同时可输出标准电压/电流信号。
并满足抗干扰、通用性、安全性、性价比等原则性要求。
标准电压/电流信号此处定为:0~5V/4~20mA2.2设计要求2.2.1 基本要求设计一个基于单片机的具有A/D和D/A功能的信号测控装置。
要求该信号测控装置能够接入典型传感器、变送器信号,同时可输出标准电压/电流信号。
并满足抗干扰、通用性、安全性、性价比等原则性要求。
12自动化计算机控制系统课程设计题目分配
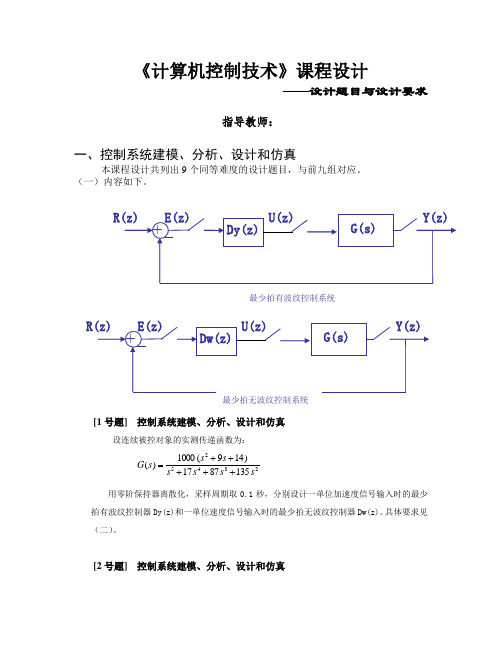
《计算机控制技术》课程设计——设计题目与设计要求指导教师:一、控制系统建模、分析、设计和仿真本课程设计共列出9个同等难度的设计题目,与前九组对应。
(一)内容如下。
[1号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.1秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[2号题] 控制系统建模、分析、设计和仿真最少拍有波纹控制系统234521358717)149(1000)(s s s s s s s G +++++=设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.2秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[3号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.2秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[4号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.05秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[5号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.05秒,分别设计一单位加速度信号输入时的最少拍有波纹8)+(s 5)+(s 1)+(s s 6)+(s 2)+(s 668)(2=s G 2345645614)5)(3(789)(s s s s s s s G +++++=2345215239)1610(868)(s s s s s s s G +++++=8)+(s 4)+(s 1)+(s s 9)+(s 2)+(s 968)(2=s G控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
计算机控制系统课程设计
计算机控制系统课程设计一、课程目标知识目标:1. 理解计算机控制系统的基本原理和概念,掌握控制系统的数学模型;2. 掌握常见控制算法,如PID控制、模糊控制等,并能运用至实际控制系统中;3. 了解计算机控制系统在不同领域的应用,如工业控制、智能家居等。
技能目标:1. 能运用所学知识对简单的控制系统进行建模和分析;2. 掌握利用计算机编程实现对控制系统的仿真和优化;3. 能设计简单的计算机控制系统,具备初步的控制系统调试和故障排查能力。
情感态度价值观目标:1. 培养学生对计算机控制系统及自动化技术的兴趣,激发其探索精神和创新意识;2. 培养学生的团队协作能力和沟通能力,使其在项目实践中学会合作与分享;3. 增强学生的社会责任感,使其认识到计算机控制系统在国民经济发展中的重要作用。
课程性质:本课程为实践性较强的学科,注重理论联系实际,通过课程设计,使学生在实践中掌握计算机控制系统的相关知识和技能。
学生特点:学生具备一定的计算机基础和控制理论知识,具有较强的动手能力和求知欲。
教学要求:结合学生特点,注重启发式教学,引导学生主动探究,提高其解决实际问题的能力。
将课程目标分解为具体的学习成果,以便于教学设计和评估。
二、教学内容1. 计算机控制系统概述- 控制系统基本原理- 计算机控制系统的组成与分类- 控制系统性能指标2. 控制系统数学模型- 线性系统数学模型- 非线性系统数学模型- 系统建模方法3. 常见控制算法- PID控制算法- 模糊控制算法- 其他先进控制算法简介4. 计算机控制系统应用案例分析- 工业控制应用案例- 智能家居应用案例- 其他领域应用案例5. 控制系统设计与实践- 控制系统设计方法- 基于计算机的控制系统仿真- 控制系统编程与调试- 故障排查与优化6. 课程项目实践- 项目任务书与要求- 项目实施步骤与方法- 项目成果展示与评价教学内容安排和进度:第1-2周:计算机控制系统概述、控制系统数学模型第3-4周:常见控制算法第5-6周:计算机控制系统应用案例分析第7-8周:控制系统设计与实践第9-10周:课程项目实践与成果展示教材章节关联:第1章:计算机控制系统概述第2章:控制系统数学模型第3章:常见控制算法第4章:计算机控制系统应用案例分析第5章:控制系统设计与实践第6章:课程项目实践与评价三、教学方法1. 讲授法:- 对于计算机控制系统的基本原理、数学模型和控制算法等理论知识,采用讲授法进行教学,使学生在短时间内掌握课程核心内容;- 讲授过程中注重启发式教学,引导学生主动思考问题,提高课堂互动效果。
过程控制系统课程设计题目和要求自动化1102

过程控制系统课程设计题目和要求自动化1102过程控制系统是自动化专业的一门重要课程,旨在培养学生对工业过程自动化控制的理论知识和实践能力。
在学习这门课程的过程中,学生需要完成一些课程设计题目,以检验对知识的掌握和应用能力。
本文将分享一些关于过程控制系统课程设计题目和要求的内容。
一、概述在过程控制系统课程设计中,学生需要完成一系列的实践任务,以应用所学知识解决实际问题。
这些任务通常结合了实验室实践和实际案例分析,旨在培养学生的实践能力和创新思维。
二、基本要求1. 深入理解过程控制系统的原理和方法,掌握控制系统的建模、分析和设计技术。
2. 熟悉常见的传感器、执行器和控制器,并能正确选择和使用它们。
3. 掌握过程控制系统的调试和优化技术,能够解决控制过程中的常见问题。
4. 具备团队合作和沟通能力,能够与他人合作完成复杂的课程设计任务。
三、课程设计题目举例1. 温度控制系统设计要求:设计一个温度控制系统,能够实时监测和调节给定温度和实际温度之间的误差。
使用合适的传感器和执行器进行温度测量和调节,并采用合适的控制算法实现闭环控制。
2. 液位控制系统设计要求:设计一个液位控制系统,能够稳定控制液位在给定范围内波动。
选用合适的传感器和执行器进行液位测量和调节,采用适当的控制策略实现对液位的控制。
3. 压力控制系统设计要求:设计一个压力控制系统,能够实时监测和调节给定压力和实际压力之间的误差。
选用合适的传感器和执行器进行压力测量和调节,并采用适当的控制算法实现对压力的控制。
4. 流量控制系统设计要求:设计一个流量控制系统,能够实时监测和调节给定流量和实际流量之间的误差。
使用合适的传感器和执行器进行流量测量和调节,并采用合适的控制算法实现对流量的控制。
四、课程设计流程1. 确定课程设计题目,并与指导教师进行讨论和确认。
2. 进行课程设计的理论准备,包括相关的知识学习和文献阅读。
3. 进行实验室实践,完成所设计的过程控制系统的搭建和调试工作。
《计算机控制技术》课程设计题目
《计算机控制技术》课程设计——成绩评定与时间安排指导教师:黄高勇一、成绩评定1. 课程设计的3个题目,请班长根据同学的意愿分成3大组,每个大组内4人一个小组,各小组同学应独立完成自己的设计,杜绝抄袭。
2. 课程设计时间:设计时间:15-16周,16周周二课题验收,带所有的设计成果参加答辩,需要现场演示(PPT演示设计方案及MATLAB/simulink仿真结果演示)。
3.根据设计报告和程序运行效果评定成绩。
要求用matlab/Simulink软件编写程序,根据设计方案设定一组默认参数,并可以在仿真界面调整参数,绘制和显示出动态曲线。
3、不参加答辩的将不能通过。
4、最终答辩成绩将答辩与课程设计报告等几方面结合起来考虑,具体包括:学习与设计态度的认真性,课堂知识理解掌握的深入程度,仿真软件应用的熟练程度,设计方案的正确性或合理性,图文的质量效果二、选题与提交形式1. 4人一组2. 最终提交成果:课程设计报告(每组一份,报告开头注明组内同学分工及完成情况);及设计相关软件成果(可演示的代码)。
三、报告基本内容(1)总体方案设计:构建系统的结构框图,确定系统各组成模块的功能和相互关系。
(2)详细设计:软件部分:依据采用的控制算法及计算机控制系统的构成特点,绘制程序流程图,并编写相应的程序代码。
程序的各个关键环节应给出文字注释。
(3)调试:首先在Matlab 软件中对系统进行仿真分析(simulink 仿真环境和纯M文件编程均需要)编译软件,获得满意的控制效果。
(4)每组撰写一份课程设计报告,不少于2000字。
(5)对用到的基本理论知识要有清晰的介绍。
对设计结果,应给出详细的比较和分析,应深入分析结果产生的原因,相应控制方法的适用场合等。
(6)在报告最后标注参考文献。
四、评分标准最终答辩成绩将答辩与课程设计报告等几方面结合起来考虑,具体包括:学习与设计态度的认真性,课堂知识理解掌握的深入程度,仿真软件应用的熟练程度,设计方案的正确性或合理性,图文的质量效果,是否独立完成,是否具有独立分析解决问题的能力和创新精神等。
自动化课程设计的题目
自动化课程设计的题目一、教学目标本课程旨在通过学习,使学生掌握自动化的基本概念、原理和方法,培养学生对自动化技术的兴趣和好奇心,提高学生的科学素养和创新能力。
具体目标如下:1.了解自动化的基本概念和分类;2.掌握自动控制系统的组成和基本原理;3.熟悉常见自动化设备的工作原理和应用。
4.能够运用自动化知识分析实际问题;5.具备初步的自动化系统设计和调试能力;6.能够使用相关软件进行自动化设备的编程和控制。
情感态度价值观目标:1.培养学生对自动化技术的热爱和兴趣;2.增强学生对科技创新的认同感和自豪感;3.培养学生团队合作、勇于探索的科学精神。
二、教学内容本课程的教学内容主要包括自动化的基本概念、自动控制系统的原理和应用、常见自动化设备的工作原理和应用等。
具体安排如下:1.第一章:自动化概述–自动化的定义和发展历程;–自动化的分类和应用领域。
2.第二章:自动控制系统–自动控制系统的组成和原理;–常见自动控制策略及其应用。
3.第三章:常用自动化设备–传感器的工作原理和应用;–执行器的工作原理和应用;–控制器的工作原理和应用。
4.第四章:自动化系统设计–自动化系统的设计方法和步骤;–自动化系统的调试和优化。
5.第五章:自动化技术的应用–工业自动化及其应用;–家居自动化及其应用;–交通自动化及其应用。
三、教学方法本课程采用多种教学方法,包括讲授法、讨论法、案例分析法、实验法等,以激发学生的学习兴趣和主动性。
1.讲授法:通过讲解自动化基本概念、原理和应用,使学生掌握基础知识;2.讨论法:学生针对实际案例进行讨论,培养学生的思考和分析能力;3.案例分析法:分析自动化技术在实际工程中的应用案例,使学生更好地理解知识;4.实验法:进行自动化设备的操作和调试,提高学生的实践能力。
四、教学资源本课程的教学资源包括教材、参考书、多媒体资料、实验设备等。
1.教材:选用权威、实用的教材,为学生提供系统、全面的知识体系;2.参考书:提供丰富的参考资料,帮助学生拓展知识面;3.多媒体资料:制作精美的PPT、视频等资料,增强课堂教学的趣味性;4.实验设备:配置完善的实验设备,为学生提供实践操作的机会。
自动化控制的课程设计
自动化控制的课程设计一、课程目标知识目标:1. 让学生理解自动化控制的基本概念,掌握其定义、分类及应用领域。
2. 使学生掌握自动化控制系统的组成、工作原理及其数学模型。
3. 帮助学生掌握自动化控制系统中常见传感器的工作原理及其选用方法。
技能目标:1. 培养学生运用自动化控制原理解决实际问题的能力。
2. 培养学生设计简单的自动化控制系统方案,并进行仿真分析的能力。
3. 提高学生进行团队协作、沟通表达和动手实践的能力。
情感态度价值观目标:1. 培养学生对自动化控制技术及其应用的兴趣,激发创新意识。
2. 增强学生对我国自动化控制领域发展的了解,培养民族自豪感。
3. 引导学生关注自动化控制技术在生活中的应用,认识到自动化技术对人类社会的贡献。
课程性质分析:本课程为专业技术课程,旨在使学生掌握自动化控制的基本理论、方法和技术,培养学生解决实际问题的能力。
学生特点分析:学生为高中年级学生,具有一定的物理、数学基础,对新鲜事物充满好奇,喜欢动手实践。
教学要求:1. 结合课本内容,注重理论联系实际,提高学生的实践操作能力。
2. 运用生动形象的语言、案例和现代教育技术手段,提高课堂教学效果。
3. 强化团队合作,培养学生的沟通能力和协作精神。
二、教学内容1. 自动化控制基本概念:包括自动控制定义、分类、应用领域;自动化控制系统发展历程。
教材章节:第一章 自动化控制概述2. 自动化控制系统组成及工作原理:介绍开环控制、闭环控制、复合控制等基本形式;分析控制器、执行器、传感器等组成部分的功能和作用。
教材章节:第二章 自动化控制系统组成及工作原理3. 自动化控制数学模型:线性系统、非线性系统数学模型;传递函数、状态空间表达式等。
教材章节:第三章 自动化控制数学模型4. 常见传感器及其选用:介绍温度、压力、流量、位置等传感器的工作原理、性能参数及选用方法。
教材章节:第四章 常用传感器及其应用5. 自动化控制案例分析:分析典型的自动化控制系统案例,如工业生产、交通运输、智能家居等领域。
自动化计算机控制课程设计参考题目

自动化计算机控制技术课程设计参考题目一、电烤箱温度计算机控制系统设计参考:应用各种控制算法(大林,smith 预估,PID 任选其一),实现温箱的闭环控制。
要求设计一个以计算机(8088)或是单片机或是DSP 为核心(任选其一)的电烤箱计算机控制系统,包括主要过程输入输出通道及主要接口,外配显示、键盘操作以及包括传感变送器及执行器的小型计算机控制系统。
温度测量范围为(建议0~120摄氏度),加热时显示实时温度。
二、数字闭环直流电机调速控制系统设计参考:掌握晶闸管直流单闭环调速系统的数学模型和工作原理;运用数字PID 、最小拍等计算机控制算法进行控制系统的设计;设计一个以计算机(8088)或是单片机或是DSP (任选其一)为核心的直流电机调速计算机控制系统,包括主要过程输入输出通道及主要接口,外配显示、键盘操作以及包括传感变送器及执行器的小型计算机控制系统。
三、 最少拍无纹波计算机控制系统设计及仿真参考:学习并掌握有纹波最少拍控制器的设计和Simulink 实现方法;研究最少拍控制系统对典型输入的适应性及输出采样点间的纹波。
以一个具体实例(根据需要自行选择)介绍最少拍系统的设计和仿真。
例如对象为)2)(1(2)(0++=s s s G选择采样周期T=1s ,试设计无纹波最少拍控制器,并分析仿真结果1)分别在单位阶跃/单位速度输入下设计无纹波有限拍控制器2)在Simulink 仿真环境画出仿真框图及得出仿真结果,画出数字控制器和系统输出波形。
3)与有纹波系统进行对比分析(选用单位速度输入进行对比分析即可)4)探讨最少拍无纹波控制系统对典型输入的适应性问题四、数字伺服控制系统设计参考:设计以计算机(8088等)或是单片机或是DSP 为核心(任选其一)的数字伺服控制系统,通过数字控制器对直流伺服电机输出转角进行控制。
控制算法可以采用二阶工程设计方法或最小拍方法进行设计。
五、电加热水温度控制系统设计参考:1)可控硅水温控制器用热得快(电阻加热炉)对水进行加热,用热敏元件设计测温电路,功率元件用光耦MOC3020驱动双向可控硅进行交流电的功率调整,再设计微型机控制板对水温进行控制,要求控制范围40~90度,控制精度±1%,超调量<5%,通过键盘进行温度设置,实际温度可以实时显示。
2012级自动化计算机控制系统课程设计

组别学号姓名蔡伟2012174282张家亮2012174192安国杰2012174212蒋仁刚2012174193曹海伟2012174194曹厚省2012174195柴逢春2012174264文皓祥2012174196陈秋晓2012174213李慧祯2012174198崔佳伟2012174209黄学鑫2012174199董世萌2012174298朱佰成2012174200董文伟2012174255王旭东2012174201杜念文2012174203封文奇2012174202范尚杰2012174237宋文112012174204郭喆2012174250王来斌2012174205韩卓章2012174296周广威2012174206郝磊2012174227刘哲2012174207何凤龙2012174242孙猛猛2012174208胡永夺2012174267徐榕聪2012174210季伯川2012174214李康2012174211姜登杰2012174215李兰涛2012174216李琦2012174254王晓博2012174217李强2012174232孟涛2012174218李士凯2012174260王永昊2012174219李帅2012174228刘子超2012174220李学良2012174265武才钧2012174222刘璐2012174229鲁士达202122231415161718197891012131234562012174223刘铭辉2012174270闫正力2012174224刘尚飞2012174230陆邦国2012174225刘爽爽2012174293赵宇帅2012174226刘新星2012174257王亚男2012174231罗国庆2012174243孙涛2012174233苗成涛2012174283张金浩2012174234莫帮勇2012174251王黎明2012174235任全超2012174291赵炳洋2012174236石岩2012174297周宇涛2012174238宋雨璇2012174240苏建东2012174241孙长信2012174246滕卓凡2012174244孙孝斌2012174281张昊淼2012174247王超2012174253王文2012174248王成哲2012174275苑文杰2012174249王静2012174286张西明2012174252王伟2012174259王祎飞2012174256王璇2012174258王燕2012174261王玉军2012174262王云朋2012174263王震2012174266徐雷2012174268徐为吉2012174299朱恒月2012174269许贵强2012174271杨召兵2012174272遇珑元2012174287张晓峰2012174273袁浩2012174276曾令河2012174274袁永茂4445464738394041424332333435363726272829303124252012174279张发玉2012174280张芳林2012174289张兆存2012174284张书豪2012174285张天祥2012174288张永达2012174290张忠彬2012174294钟宏益2012174295周长鸣5051474849题目题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里可燃气体检测及报警装置基于数字PID的电加热炉温度控制系统设计题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里基于线性CCD的智能车设计题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里题目对应于相应的word文档里提醒:没有题目的组别请,请到另一个word文档里找自己相对应的题目。
计算机 自动化 流程设计 课题
计算机自动化流程设计课题下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!计算机自动化流程设计课题导言在当今数字化时代,计算机自动化技术在各个领域发挥着越来越重要的作用。
2012-2013过程控制系统课程设计题目和要求-自动化
本次课程设计采用MATLAB仿真完成。
设计题目分为二个部分。
答疑时间:有问题可以发邮件或者打电话。
课程设计报告:按照设计题目的要求完成报告;答辩时间:自动化0901:16周周五上午8:30-12:00,地点:工学二号馆513;自动化0902:16周周五下午1:30-5:00,地点:工学二号馆513;答辩要求:(1)长学号(如3109001440)末位数相同的若干位同学一起答辩;(2)要求演示仿真程序;(3)答辩时交课程设计报告。
第一部分:要求:按照长学号(如3109001440)的末位数选做下列题目。
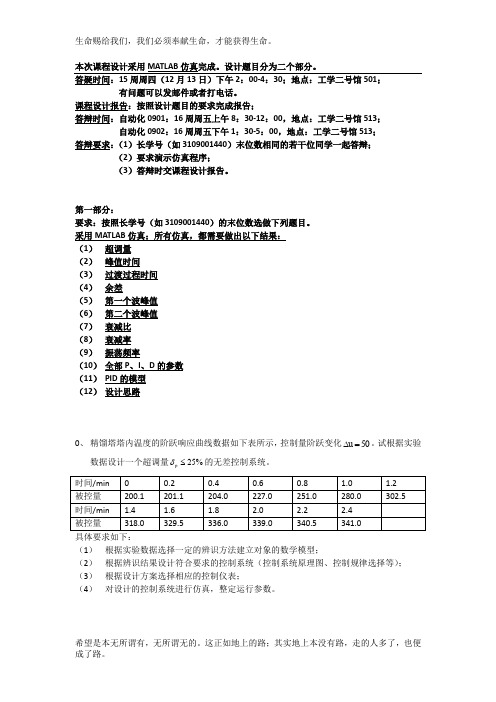
采用MATLAB仿真;所有仿真,都需要做出以下结果:(1)超调量(2)峰值时间(3)过渡过程时间(4)余差(5)第一个波峰值(6)第二个波峰值(7)衰减比(8)衰减率(9)振荡频率(10)全部P、I、D的参数(11)PID的模型(12)设计思路0、精馏塔塔内温度的阶跃响应曲线数据如下表所示,控制量阶跃变化50∆=。
试根据实验u 数据设计一个超调量25%δ≤的无差控制系统。
p具体要求如下:(1)根据实验数据选择一定的辨识方法建立对象的数学模型;(2)根据辨识结果设计符合要求的控制系统(控制系统原理图、控制规律选择等);(3)根据设计方案选择相应的控制仪表;(4)对设计的控制系统进行仿真,整定运行参数。
1、锅炉汽包液位的阶跃响应曲线数据如下表所示,控制量阶跃变化5∆=。
试根据实验数u据设计一个超调量25%δ≤的无差控制系统。
p(1)根据实验数据选择一定的辨识方法建立对象的数学模型;(2)根据辨识结果设计符合要求的控制系统(控制系统原理图、控制规律选择等);(3)根据设计方案选择相应的控制仪表;(4)对设计的控制系统进行仿真,整定运行参数。
2、加热炉出口温度控制系统,测取温度对象的过程为:当系统稳定时,在温度调节阀上做试根据实验数据设计一个超调量25%δ≤的无差控制系统。
具体要求如下:p(1)根据实验数据选择一定的辨识方法建立对象的数学模型;(2)根据辨识结果设计符合要求的控制系统(控制系统原理图、控制规律选择等);(3)根据设计方案选择相应的控制仪表;(4)对设计的控制系统进行仿真,整定运行参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《计算机控制技术》课程设计——设计题目与设计要求指导教师:一、控制系统建模、分析、设计和仿真本课程设计共列出9个同等难度的设计题目,与前九组对应。
(一)内容如下。
[1号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.1秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[2号题] 控制系统建模、分析、设计和仿真最少拍有波纹控制系统234521358717)149(1000)(s s s s s s s G +++++=设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.2秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[3号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.2秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[4号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.05秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[5号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.05秒,分别设计一单位加速度信号输入时的最少拍有波纹8)+(s 5)+(s 1)+(s s 6)+(s 2)+(s 668)(2=s G 2345645614)5)(3(789)(s s s s s s s G +++++=2345215239)1610(868)(s s s s s s s G +++++=8)+(s 4)+(s 1)+(s s 9)+(s 2)+(s 968)(2=s G控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[6号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.01秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[7号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.01秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[8号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为:用零阶保持器离散化,采样周期取0.02秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
[9号题] 控制系统建模、分析、设计和仿真设连续被控对象的实测传递函数为: 2345273913)5)(2(999)(s s s s s s s G +++++=23452486215)86(1818)(s s s s s s s G +++++=)7)(5)(2()6)(1(879)(2+++++=s s s s s s s G 23452645614179828991999)(s s s s s s s G +++++=用零阶保持器离散化,采样周期取0.02秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。
具体要求见(二)。
(二)1、求被控对象传递函数G(s)的MATLAB描述。
2、求被控对象脉冲传递函数G(z)。
3、转换G(z)为零极点增益模型并按z-1形式排列。
4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际闭环系统稳定的要求。
5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳定的要求。
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。
7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。
8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。
9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。
10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际闭环系统稳定的要求。
11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际闭环系统稳定的要求。
12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。
13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。
14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。
15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。
16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。
二、数字滤波系统设计1.用计算机模拟带有干扰的正弦信号R(频率100Hz)。
首先计算机产生一个随机信号,再与正弦信号叠加。
2.计算机对含有干扰的正弦信号进行数字滤波处理,保留正弦信号,去除干扰。
3.输入为模拟电压,输入模拟电压范围为0~+5V,最后滤波的结果用LED显示器显示。
第10组:1)分析数字滤波的常用方法,以及各自的优缺点;2)采用一阶惯性滤波器算法,设计算法程序;3)通过数据分析采样周期T对滤波效果的影响;4)撰写设计说明书。
第11组:基本要求同第1人,只有第2)点要求不同2)采用平均值滤波算法,设计算法程序;第12组:基本要求同第2人,只有第3)点要求不同3)通过数据分析参与平均值滤波的测量数据个数对对滤波效果的影响;第13组:基本要求同第1人,只有第2)点要求不同2)加权平均值滤波器,设计算法程序;第14组:基本要求同第4人,只有第3)点要求不同3)通过数据分析参与加权平均值滤波的采样数据个数对滤波效果的影响;第15组:基本要求同第4人,只有第3)点要求不同3)通过数据分析四次采样值加权平均值滤波器的系数对滤波效果的影响;三、温度控制系统设计被控对象为电炉,采用热阻丝加热,利用大功率可控硅控制器控制热阻丝两端所加的电压大小,来改变流经热阻丝的电流,从而改变电炉炉内的温度。
可控硅控制器输入为0-5伏时对应电炉温度0-300℃,温度传感器测量值对应也为0-5伏,对象的特性为带有纯滞后环节的一阶系统,惯性时间常数为T1=30秒,滞后时间常数为τ=10秒。
第16组:1)设计温度控制系统的计算机硬件系统,画出框图;2)编写积分分离PID算法程序,从键盘接受K p、T i、T d、T及β的值;3)通过数据分析K p改变时对系统超调量的影响。
4)撰写设计说明书。
第17组:基本要求同第1人,只有第3)点要求不同:3)通过数据分析T i改变时对系统超调量的影响。
第18组:基本要求同第1人,只有第3)点要求不同:3)通过数据分析T d改变时对系统超调量的影响。
第19组:基本要求同第1人,只有第3)点要求不同:3)通过数据分析T改变时对系统超调量的影响。
第20组:基本要求同第1人,只有第3)点要求不同:3)通过数据分析β改变时对系统超调量的影响。
第21组:1)设计温度控制系统的计算机硬件系统,画出框图;2)撰写设计说明书。
第22组:基本要求同第1人,但对象特性为积分加惯性系统,惯性时间常数为40秒。
第23组:基本要求同第2人,但对象特性为积分加惯性系统,惯性时间常数为40秒。
第24组:基本要求同第3人,但对象特性为积分加惯性系统,惯性时间常数为40秒。
第27组:基本要求同第4人,但对象特性为积分加惯性系统,惯性时间常数为40秒。
第28组:基本要求同第5人,但对象特性为积分加惯性系统,惯性时间常数为40秒。
第29组:基本要求同第1人,但对象特性为二阶惯性系统,惯性时间常数均为20秒。
第30组:基本要求同第2人,但对象特性为二阶惯性系统,惯性时间常数均为20秒。
第31组:基本要求同第3人,但对象特性为二阶惯性系统,惯性时间常数均为20秒。
第32组:基本要求同第4人,但对象特性为二阶惯性系统,惯性时间常数均为20秒。
第33组:基本要求同第5人,但对象特性为二阶惯性系统,惯性时间常数均为20秒。
四、可燃气体检测及报警装置1.对常见可燃气体进行自动监测的报警装置2.检测到气体浓度超过设定上限时,发出声光报警3.工作原理:采用的控制方案--直接数字控制(DDC)第34组:1)设计可燃气体检测及报警装置硬件系统,画出框图;2)检测到气体浓度超过设定上限时,发出声光报警;3)采用的控制方案--直接数字控制(DDC);4)CPU采用单片机;5)撰写设计说明书。
第35组:基本要求同第1人,只有第4)点要求不同:4)CPU采用PLC。
第36组:基本要求同第1人,只有第4)点要求不同:4)CPU采用PC。
五、非编码键盘的扫描程序设计1.通过8155扩展I/O口行列式键盘;2.利用8031微控制器。
第37组:1)8155扩展I/O口组成4×8行列式键盘,设计非编码键盘的扫描硬件系统,画出电路图;2)对键盘按键能够正确识别,去抖动;3)键盘扫描;4)撰写设计说明书。
第38组:1)8155扩展I/O口组成6×6行列式键盘,设计非编码键盘的扫描硬件系统,画出电路图;2)对键盘按键能够正确识别,去抖动;3)键盘扫描;4)撰写设计说明书。
圆弧二 (第45组)圆弧三(第46组)圆弧四(第47组)XYOXY O XYO第48组题目:直流伺服电机控制系统设计设计内容课程设计对象是直流伺服电机实验台,设计一个计算机控制的直流伺服电机控制系统。
由测量元件(位移传感器)对被控对象(电机)的被控参数(位移)进行测量,由变换发送单元(A\D 转换器)将被控参数(位移)变成一定形式的信号,送给控制器CPU ,控制器将测量信号(实际位移量)与给定信号(位移量)进行比较,若有误差则按预定的控制规律产生一控制信号驱动执行机构(伺服电机控制电源)工作,使被控参数(实际位移量)与给定值(给定位移量)保持一致。
其电机位置随动系统:)1)(1()1()(213+++=T s T s s T K S G 式中,K=100, T 1=1.8,T 2=0.035,T 3=0.15控制算法选用数字PID 控制。