无人机发射方式
无人机上天的7种姿势垂直起降最方便
⽆⼈机上天的7种姿势垂直起降最⽅便 ⽆⼈机的发射⽅式可归纳为⼿抛发射、零长发射、弹射发射、起落架滑跑起飞、母机空中发射、容器式发射装置发射和垂直起飞等类型。
在地⾯发射时,⽆⼈机使⽤较为⼴泛的发射⽅式是零长发射与弹射发射⽅式。
⼤展弦⽐机翼的⽆⼈机,特别是长航时⽆⼈机,通常⽤起落架滑跑起飞的⽅式。
空中发射⽅式的主要优点是机动性⾼,发射点活动范围⼤,可降低⽆⼈机燃油载量和航程要求,⼩、轻型⽆⼈机多采⽤这种发射⽅式,尤其是在美国。
容器式发射装置常⽤于发射轻型⽆⼈机,或⽤于军舰和潜艇上发射⽆⼈机。
垂直起飞⽅式是旋翼⽆⼈机⼴为采⽤的起飞⽅式。
1.⼿抛发射 这种发射⽅式最简单,由1⼈或2⼈操作,靠⽆⼈机⾃⾝动⼒起飞。
⼿抛发射的⽆⼈机通常最⼤尺⼨⼩于3m,发射重量多数⼩于7kg。
例如FQM-ISLA“指针”该机是单⼈携带/发射式⽆⼈机,翼展2.74m,机长1.83m,最⼤发射重量3.6kg。
英国的BIT-1Imp是单⼈发射⽆⼈机,其翼展1.83m,机长1.09m,最⼤发射重量5.9kg。
2.零长发射 ⽆⼈机安装在零长发射装置上,在⼀台或多台助飞⽕箭发动机推⼒作⽤下飞离发射装置,⽆⼈机起飞后,抛掉助飞⽕箭,由机上主发动机完成飞⾏任务。
例如,加拿⼤的CL-289,该机机⾝尾部装有1台涡喷发动机,在其后通过推⼒杆连接1台助飞⽕箭发动机。
在助飞⽕箭作⽤下,⽆⼈机从车载零长发射装置上发射。
助飞⽕箭⼯作⼏秒后⾃动分离⽆⼈机,由涡喷发动机完成飞⾏任务。
英国的ASAT/“⼩鹰”,机⾝下部两侧各装1台可弃式助飞⽕箭,在2台助飞⽕箭作⽤下,⽆⼈机由零长发射架上起飞。
助飞⽕箭⼯作1.3秒后被扔掉,⽆⼈机由机上涡喷发动机完成飞⾏任务。
3.弹射式发射 ⽆⼈机安装在轨道式发射装置上,在压缩空⽓、橡⽪筋或液压等弹射装置作⽤下起飞,⽆⼈机飞离发射装置后,在主发动机作⽤下完成飞⾏任务。
例如,英国的'不死鸟'在液压弹射器作⽤下从车载斜轨上发射;法国的'玛尔特”MKII在弹簧索弹射装置作⽤下从斜轨上发射⽐利时的'⾷雀鹰'在⾃带的M3型⽕箭助推器作⽤下从2.5m短轨上发射。
无人机发射和回收方法一览.doc
无人机发射和回收方法一览【摘要】同有人驾驶飞机的起飞和降落阶段一样,在无人机的运用中,发射与回收阶段往往被认为是最困难、最关键的阶段,同样也是多种多样的。
本文以支持发射与回收的载体机构作为分类依据,列举了目前常见的无人机发射和回收方法。
【关键词】无人机;发射和回收方法无人机是“无人驾驶空中飞行器”(UAV)或“遥控驾驶飞行器”(RPV)的简称,无人机的“无人”这一特点,使其在运用的时候默默无闻,不能像有人驾驶飞机那样,被外界大书特书。
在一般人眼里,无人机可能就是一架遥控飞机,或是电视新闻里无人机一些侦察的场面,除此之外,也许就是一些展览中的图片和数据的堆砌。
但是,近年来,无人机的飞速发展引起世界各国的普遍关注,无论在国防领域还是在民用方面都有广泛的应用。
同有人飞机的起飞和降落阶段一样,在无人机的运用中,发射与回收阶段往往被认为是最困难、最关键的阶段,同样也是多种多样的,世界无人机有多少种发射方式和回收方式,这很难说出精确数字,但可以肯定地说,比有人飞机的起飞着陆方式要多得多。
一、无人机的发射方法无人机的发射方法有很多,在概念上有些十分简单,有些又十分复杂。
许多发射概念源于各种大型飞行器的发射经验,另一些为小型无人飞行器所特有。
目前常见的发射方式有起落架滑跑(Wheeled Take-off Launcher)、起飞跑车滑跑(Running Launcher)、母机空中发射(Air Drop Launcher)、发射架上发射或弹射(Catapult Launcher)、容器(箱式)内发射或弹射(Tube Launcher)、火箭助推(Booster Rocket Launcher)、垂直起落(Vertical Take-off Launcher)、缆绳系留、手抛(Hand Launcher)和自动发射(Auto Launcher)等方法。
或许简单的发射方式源于航模的“手抛发射”。
这种方式很实用,但仅适用于重量相对较轻的飞行器,这类飞行器载重量低,动力适当。
无人机技术基础与技能训练 第5章 无人机其他系统
第5章 无人机其他系统
2.回收方式 (3)撞网回收 撞网回收指的是无人机在地面无线设备和自动引导设备的引导下,逐渐降低高度,减小速度,然后正对着拦截网飞去,从而达到回收的目的。 (4)绳钩回收 绳钩回收指的是利用绳索抓捕无人机翼尖小钩来实现回收的一种方式,主要由回收绳、吸能缓冲装置、导引装置等组成,占用空间小,且不易受天气影响。 (5)气囊方式回收 气囊不仅可以配合降落伞使用,也可以单独作为一种着陆方式使用。这种方式不需要起落架和降落伞,无人机在着陆前打开气囊,然后直接触地即可借此实现缓冲目的。
地面站和任务规划系统
第5章 无人机其他系统
2.任务规划系统 (1)任务规划概念与目标 无人机任务规划是指根据无人机需要完成的任务、无人机的数量以及携带任务载荷的类型, 对无人机制定飞行路线并进行任务分配。 任务规划的目标是依据地形信息和执行任务的环境条件信息, 综合考虑无人机的性能、到达时间、耗能、威胁以及飞行区域等约束条件,为无人机规划出一条或多条自出发点到目标点的最优或次优航迹,保证无人机高效、圆满地完成飞行任务, 并安全返回基地。
发射与回收系统
第5章 无人机其他系统
1.发射方式 (3)母机空中发射 许多无人机,尤其是靶机是装载在固定翼飞机上从空中发射的,这些无人机通常都具有较高的失速,由涡轮喷气发动机提供动力。
发射与回收系统
第5章 无人机其他系统
1.发射方式 (4)火箭助推发射 有些无人机通常也在地面上利用火箭助推发射。火箭助推发射方式为使飞行器达到起飞速度通常需要有效作用距离上施加一个发射力,但一般要求在一段很长距离内把发射力施加在飞机上,以使其达到飞行速度。 (5)车载发射 就是将飞机及其配件装载在发射车顶上,鼓足劲儿驾车飞驰。 (6)轨道发射 有些无人机通过导轨或轨道加速到发射速度的装置称为轨道发射器。
无人机简介

无人机简介1、什么是无人机(UAV)无人机(Unmanned Aerial Vehicle),无人航空器是指不搭载操作人员的一种动力空中飞行器,采用空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。
无人机与各种导弹等无人武器系统的区别:(1)无人机在飞行结束后可以收回,导弹不能。
(2)无人机携带的弹药并不与机身形成一体,而导弹的弹头整合在弹体内。
2、无人机系统的一般组成无人机系统包括地面系统、飞机系统、任务载荷和无人机使用保障人员。
如下图并不是无人机都全部具有上述所有系统。
3、无人机的一般分类无人机的分类不完善,有些概念的界限比较模糊。
按起飞重量分:按用途分:无人侦察机、电子战无人机、靶机、反辐射无人机、对地攻击无人机、通信中继无人机、火炮较射无人机、特种无人机、诱饵无人机。
按飞行方式分:固定翼无人机、旋翼无人机、扑翼无人机、飞艇4、无人作战飞机的组成:典型的无人作战飞机的组成如下图:(1)飞行器平台:任务承载平台,根据不同的任务进行气动布局和气动力设计。
(2)动力系统:(3)自主飞行控制系统:无人机的飞行控制系统是无机机系统的核心,负责控制飞机完成自主飞行、着陆、出航等任务。
(4)信息处理与传输系统:无人机配备的数据链系统、战术信息收发系统。
用于无人机和地面控制站、卫星、军舰等进行信息交流、传递情报、接受指令。
(5)目标探测系统:用于探测目标的传感器,包括红外成像、SAR雷达、激光测距等(6)武器系统:提供武器控制和投放(7)目标识别:包括敌我识别、目标识别和目标细节识别(8)精确导航:包括惯导、GPS、多普勒导航等(9)起降系统:现役的无人机起飞和着陆基本上依靠地面来操作,未来的无人机系统向自主起飞、着陆和空中机动的能力。
(10)空域管理系统:包括冲突检测和防撞系统、着陆辅助装置等(11)自主攻击决策系统:无人作战飞机完成作战任务的主要系统。
无人机综合知识简介

无人机综合知识简介Revised on November 25, 2020无人机综合知识简介1、无人机(UAV)的概念无人机(Unmanned Aerial Vehicle)就是利用无线遥控或程序控制来执行特定航空任务的飞行器,指不搭载操作人员的一种动力空中飞行器,采用空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。
2、无人机系统的一般组成无人机系统包括地面系统、飞机系统、任务载荷和无人机使用保障人员。
如下图:3、无人机的一般分类按用途分:无人侦察机、电子战无人机、靶机、反辐射无人机、对地攻击无人机、通信中继无人机、火炮较射无人机、特种无人机、诱饵无人机。
按飞行方式分:固定翼无人机、旋翼无人机、扑翼无人机、飞艇。
4、无人机的飞行控制无人机上没有驾驶员,所以无人机和飞行靠“遥控”或“自控飞行”。
(1)遥控飞行遥控即对被控对象继续远距离控制,主要无线电遥控。
遥控信号:遥控站通过发射机向无人机发送无线电波,传递指令,无人机上的接收机接收并译出指令的内容,通过自动驾驶仪按指令操纵舵面,或通过其他接口操纵机上的任务载荷。
遥控站设有搜索和跟踪雷达,他们测量无人机在任意时刻相对地面的方位角、俯仰角、距离和高度等参数,并把这些参数输入到计算机,计算后就能绘出无人机的实际航迹,与预定航线比较,就能求出偏差,然后发送指令进行修正。
此外,无人机还装备有无线电应答器,也叫信标机。
它能在收到雷达的询问信号后,发回一个信号给雷达。
由于信标机发射的信号比无人机发射的雷达信号要强得多,起到增加跟踪雷达的探测距离。
下传信号:遥控指令只包含航迹修正信号是显然不够的,在飞行中无人机会受到各种因素的影响,无人机的飞行姿态也在不断变化,所以指令还需要包括对飞行姿态的修正内容。
无人机上的传感器一直在收集自身的姿态信息,这些信息通过下传信号送到遥测终端,遥测终端分析这些信息后就能给出飞行姿态的遥控修正指令。
弹射及短距起降无人机概览

垂直/短距起降飞机,是指固定翼飞机在垂直或短距离内起飞和着陆的飞机。一般来说直升飞机不在垂直/短距起降飞机范畴。
典型的垂直/短距起降飞机有英国AV-8“海鹞”战斗机和美国F-35“闪电Ⅱ”战斗机。
目前,电磁发射技术较多用于带有长直导轨的大型舰载发射平台上.如美国“全球鹰”无人机的航母电磁发射平台.
“全球鹰”无人机的航母电磁发射平台
(四)燃气弹射
燃气弹射无人机又称为炮射无人机、其发射手段与火箭助推发射较为类似:都是通过火药燃烧产生的推力使无人机加速发射.但不同点在于,燃气弹射无人机上不直接带有火箭助推发动机,而是将无人机整体置于发射榴弹炮或火箭炮的炮管内,当火炮点火后,火药燃烧产生的大量高温高压气体推动机身在炮膛内加速运动,最终像普通弹丸一样完成发射.
弹射起飞的优点是机动灵活性好、安全隐蔽性好;其缺点是发射质量不能太大,滑轨不能太长。
弹射起飞方式按照动力源的不同可以分为弹性元件弹射、气/液压弹射、电磁弹射及燃气弹射等弹射方式。
(一)弹性元件弹射
弹性元件弹射是指利用弹性系数较大的弹性元件(如橡皮筋、弹簧等),在拉伸或压缩时储存的弹性势能转化为飞机飞行时所需的动能的一种发射方式.其优点是结构简单,操纵方便,不需要电力、火药等消耗性能源.但只能发射十几千克量级的小型无人机,并且由于弹性元件的弹性极限和寿命的限制,无法将飞行器加到很高的速度,使用次数不宜太多.
英国的“女妖”,法国的“玛尔特”,俄罗斯的“超光速粒子”以及法国泰雷兹集团的“Fumlar”无人机都可采用这种发射方式。
英国“女妖”高速靶机及发射装置
图2“Fumlar”无人机及发射装置
(二)气/液压弹射
气/液压弹射是一种以气/液压作为无人机弹射起飞的动力源的一种发射方式,它通常由气/液源、带缓冲气缸(液压缸)、滑轮增程装置、滑轨、气/液控制阀、管路等几部分组成.通过对气(液)路及增程装置进行设计可以达到自动发射、减速、停止及回程的目的,实现无人机的自动连续发射.这种发射方式的各项性能适中,与滑跑起飞方式相比,无需专用跑道,灵活性较好,可以搭载在机动车辆或舰船上;与火箭助推方式相比,它没有火控系统,使用、存储较为安全.但其由于使用消耗性的气(液)源,故在不能得到及时补充的情况下无法进行长期的连续发射.
第三章 飞行原理与飞行性能

在机翼上,压力最高的点也就是所谓的驻点,在驻点处是空气与前缘相 遇的地方。这点是空气相对于机翼的速度减小到零的点。
在一个迎角为零、完全对称的机翼上,从驻点开始,流经上下表面气 流速度是相同的,所以上下表面的压力变化也是完全相同的。
如果对称机翼相对来流旋转了一个迎角,驻点就会稍稍向前缘的下表 面移动,并且流经上下表面的空气流动情况改变了,流经上表面的空气被 迫多走了一段距离,在上下表面,空气仍然有一个从驻点加速离开的过程, 但是在下表面的最高速度要小于上表面的最高速度。
质量守恒定律:质量不会自生也不会自灭。 流体的质量流量:单位时间流过横截面面积S的流体质量。
q sv
3.流体连续方程
1s1v1 2s2v2 3s3v3 ...... const. 即: sv const.
当流体不可压缩时
即: const. 时:
有: sv const.
惯性向外 (离心力)
6.力的分解
一个水平飞行的动力模型受到许多施加在它每个部分的力的影响, 但是所有的这些力都可以按作用和反作用分成4个力
三、机动飞行中的空气动力
1.飞机的几何外形和参数
翼型及其参数
♦翼型: 机翼的横剖面形状。翼型最前端的一点叫“前缘”, 最后端一点叫“后缘”。 翼型前缘点与后缘点之间连线称为翼弦。
目前所使用的大多是自动式前缘缝翼。这种前缘缝翼用滑动机 构与基本机翼相连,依靠前缘空气动力的压力和吸力来自动控制其 闭合和打开。
4.飞机低速飞行的阻力
按阻力产生的原因,飞机低速飞行时的阻力一般可分为:
• 摩擦阻力 • 压差阻力 • 诱导阻力 • 干扰阻力
阻力的计算公式:
Q
C(x
1 2
AOPA无人机飞行原理练习题
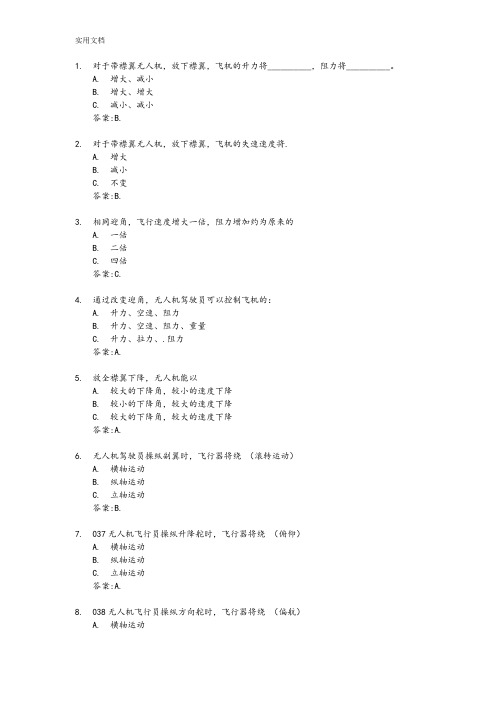
1.对于带襟翼无人机,放下襟翼,飞机的升力将__________,阻力将__________。
A.增大、减小B.增大、增大C.减小、减小答案:B.2.对于带襟翼无人机,放下襟翼,飞机的失速速度将.A.增大B.减小C.不变答案:B.3.相同迎角,飞行速度增大一倍,阻力增加约为原来的A.一倍B.二倍C.四倍答案:C.4.通过改变迎角,无人机驾驶员可以控制飞机的:A.升力、空速、阻力B.升力、空速、阻力、重量C.升力、拉力、.阻力答案:A.5.放全襟翼下降,无人机能以A.较大的下降角,较小的速度下降B.较小的下降角,较大的速度下降C.较大的下降角,较大的速度下降答案:A.6.无人机驾驶员操纵副翼时,飞行器将绕(滚转运动)A.横轴运动B.纵轴运动C.立轴运动答案:B.7.037无人机飞行员操纵升降舵时,飞行器将绕(俯仰)A.横轴运动B.纵轴运动C.立轴运动答案:A.8.038无人机飞行员操纵方向舵时,飞行器将绕(偏航)A.横轴运动B.纵轴运动C.立轴运动答案:C.9.舵面遥控状态时,平飞中向右稍压副翼杆量,无人机(右转)A.右翼升力大于左翼升力B.左翼升力大于右翼升力C.左翼升力等于右翼升力答案:B.10.舵面遥控状态时,平飞中向前稍推升降舵杆量,飞行器的迎角(低头)A.增大B.减小C.先减小后增大答案:B.11.舵面遥控状态时,平飞中向后稍拉升降舵杆量,飞行器的迎角(抬头)A.增大B.减小C.先增大后减小答案:A.12.飞机的下滑角是A.升力与阻力的夹角B.飞行轨迹与水平面的夹角C.阻力与重力的夹角答案:B.13.使飞机获得最大下滑距离的速度是(飞机处于有利速度时总阻力最小)A.最大下滑速度B.失速速度C.下滑有利速度答案:C.14.下滑有利速度使A.飞机下滑阻力最小B.飞机下滑角最大C.飞机下滑升力最大答案:A.15.045用下滑有利速度下滑,飞机的(对应于最大升阻比的下滑称为最有利下滑,此时下滑角最小,下滑水平距离最长。
课件 (五)无人机的发射回收

5.2 无人机的发射方式
宇航学院 宇航推进系
5. 发射车发射 -无人机安装在三轮或四轮发射车上; -车上发动机推动发射车和无人机加速; -达到无人机起飞速度后,无人机脱离发射车起飞; -澳大利亚“金迪维克”。 6. 母机空中发射 -无人机由有人飞机携带到空中; -达到预定高度和速度后空中发射; -一般用固定翼飞机翼下悬挂的方式; -直升机一般在两侧携带; -中国“无侦-5”、美国“火蜂”。
5.2 无人机的发射方式
宇航学院 宇航推进系
播放发射录像 -各种无人机起降(12段录像); -美国型号无人机。
宇航学院 宇航推进系
5.3 无人机的回收技术
5.3 无人机的回收技术
宇航学院 宇航推进系
1. 回收要求 -能从工作范围任一点回收; -飞行器和机载设备损伤最小; -简单、成本低、质量轻、体积小; -长期储存; -修复成本低; -着陆准确; -对损伤不敏感。
5.2 无人机的发射方式
宇航学院 宇航推进系
3. 零长发射 -一台或多台火箭发动机作为助推器; -起飞后抛弃助推器; -助推火箭工作时间一般为几秒钟; -美国“火蜂”、“猎人”等。 4. 滑轨式发射; -靠自身动力或发射装置动力滑跑加速; -飞离发射装置后,主发动机工作; -发射装置动力有液压、气动、弹力等。
5.4 无人机的回收方式
宇航学院 宇航推进系
5. 空中回收 -大飞机空中回收,只有美国使用; -具有空中回收系统; -除了主伞和减速伞外需要有钩挂伞、吊索和可旋转的脱落机构; -钩挂伞在主伞上,大飞机逆风进入; -费用高,要求高,风险高; -美国“火蜂”II,直升机钩挂。 6. 垂直着陆 -与垂直发射类似
5.4 无人机的回收方式
5.4 无人机的回收方式
AOPA考试试题分析03-04——无人机起飞和降落方式

分析:该部分考察的内容是
无人机起飞和降落方式
AOPA无人机驾驶员考试试题分析
目前常见的起飞/发射方式有:
起落架滑跑(Wheeled Take-off Launcher) 起飞跑车滑跑(Running Launcher) 母机空中发射(Air Drop Launcher) 发射架上发射或弹射(Catapult Launcher) 容器(箱式)内发射或弹射(Tube Launcher)
靠机身腹部或背部的结构擦地回收(Body landing Recovery)
迫降回收
飞机回收
火箭反向制动回收
AOPA无人机驾驶员考试试题分析
无人机降落/回收
感谢您下载包图网平台上提供的PPT作品,为了您和包图网以及原创作者的利益,请勿复制、传播、销售,否则将承担法律责任!包图网将对作品进行维权,按照传播下载次数进行十倍的索取赔偿!
AOPA无人机驾驶员考试试题分析
无人机起飞/发射
感谢您下载包图网平台上提供的PPT作品,为了您和包图网以及原创作者的利益,请勿复制、传播、销售,否则将承担法律责任!包图网将对作品进行维权,按照传播下载次数进行十倍的索取赔偿!
AOPA无人机驾驶员考试试题分析
无人机起飞/发射方式简介:
AOPA无人机驾驶员考试试题分析
常见的无人机降落/回收方式:
垂直起落回收(Vertical Landing Recovery)
捕钩回收(Arresting Hook Recovery)
起落架着陆(Wheeled Landing Recovery)
翼伞回收(Parafoil Recovery)
伞降回收(Parachute Recovery)
பைடு நூலகம்
无人机的发射与回收

无人机的发射与回收 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】无人机的发射与回收发射与回收系统是无人机的一个重要功能系统,是满足无人机机动灵活、重复使用以及高生存能力等多种需求的必要技术保障。
从物理学角度看,无人机的发射与回收过程均是对无人机做功的过程,发射过程对无人机提供能量,而回收过程则是吸收无人机的能量。
一、发射技术1、火箭助推发射火箭助推发射主要是利用火箭助推器的能量,在短时间内将无人机加速到一定的速度和高度,一般采用零长发射和短轨发射方式。
按照火箭助推器的使用数量及在无人机上连线布置形式的不同,可分为:单发共轴式、单发夹角式、双发夹角式和箱式自动连续发射等。
共轴式助推发射火箭推力线与机体轴线一致,无人机加速迅速,推力线线控制与调整简单,但推力座设置复杂,特别是后置式动力装置协调困难。
夹角助推式或加推离线与机体轴线成一定角度,推力座设置简单,但推力线控制与调整要求较为复杂,火箭脱落时与后置式动力装置易发生干涉。
按照发射架与无人机的相对位置关系,分为悬挂式和下托式发射方式。
悬挂式多用于共轴式发射、离轨下沉量较大的无人机;而下托式多用于夹角式发射、离轨下沉量较小的无人机。
图1 RQ-2“先锋”(Pioneer)无人侦察机单夹角发射火箭助推器发射优点是机动灵活、通用性好、应用广泛,几乎适用于任何类型的飞机,是常用的无人机发射方式之一;缺点是设计火工品的贮存、运输和使用,发射时具有声光烟等容易暴露发射阵地的较强物理特征。
(这个无所谓吧,打一枪换一个地方呗)2、弹射起飞弹射起飞的主要原理是将液压能、气压能或弹性势能等不同形式能量转换为机械动能,使无人机在一定长度的滑轨上加速到安全起飞速度。
按发射动力能源的不同形式,可分为:液压弹射、气压弹射、橡筋弹射、电磁弹射等。
(1)起飞速度小于25m/s,起飞重量小于100kg,通常采用橡筋弹射方式;(2)起飞速度小于25~45m/s,起飞重量小于400kg,通常采用气压或液压弹射方式。
AOPA无人驾驶航空器驾驶员考试题库
1.近程无人机活动半径在(1分)B.15~50km2.无人机系统飞行器平台主要使用的是空气的动力驱动的航空器。
(1分)B.重于3.超近程无人机活动半径在以内。
(1分)A.15km4.无人机系统通讯链路主要包括:指挥与控制(C.&C.),,感知和规避(S&A.)三种。
A.空中交通管制(A.TC.)5.主要是制定无人机飞行任务、完成无人机载荷数据的处理和应用,指挥中心/数据处理中心一般都是通过无人机控制站等间接地实现对无人机的控制和数据接收。
(1分)A.指挥处理中心6.属于无人机飞控子系统功能的是(1分)A.无人机姿态稳定与控制7.目前主流的民用无人机所采用的动力系统通常为活塞式发动机和两种。
(1分)C.电动机8.的功能是向无人机各用电系统或设备提供满足预定设计要求的电能。
(1分)C.供电系统9.无人机在增稳飞行控制模式下,飞控子系统控制。
(1分)A.参与10.活塞发动机混合气过富油燃烧将引起的问题。
(1 分)B.电嘴积炭11.汽化器式活塞发动机在何时容易出现汽化器回火现象(1分)C.寒冷天气第一次起动时12.不应属于无人机飞控计算机任务范畴的是(1分)A.数据中继13.无人的发动机采用重力供油系统但装有增压泵,主要是为了C.保证爬升、下降及其它特殊情况下的正常供油14.二冲程活塞汽油发动机应使用何种润滑油(1分)A.2T 机油15.以下不是导航飞控系统组成部分的是。
(1分)B.电台16.是无人机完成起飞、空中飞行、执行任务、返场回收等整个飞行过程的核心系统,对无人机实现全权控制与管理,因此该子系统之于无人机相当于驾驶员之于有人机,是无人机执行任务的关键。
(1分)B.飞控子系统17.无人机电气系统一般包括3个部分。
(1 分)B.电源、配电系统、用电设备18.无人机通过控制舵面和发动机节风门来实现无人机控制。
(1分)A.伺服执行机构19.飞机的方向安定性过强,而横侧安定性相对过弱,飞机容易出现(1分)B.螺旋不稳定20.无人机的发射方式可归纳为手抛发射、零长发射、弹射发射、起落架滑跑起飞、母机空中发射、容器式发射装置发射和垂直起飞等类型。
无人机自力起飞方式研究

收稿日期:2018-04-16修回日期:2018-05-07作者简介:叶帅辰(1994-),男,辽宁沈阳人,博士研究生。
研究方向:飞行器制导与控制。
摘要:对目前无人机主流的自力起飞方式进行了一一列举;详细阐释了不同起飞方式的特点、工作原理及各自的局限性;其次,分类介绍了国内外在无人机自力起飞领域的最新研究进展。
最后,对不同种自力起飞方式进行了比较,给出相关技术指标,对比了各自的优缺点,并对无人机自力起飞技术的发展趋势进行了展望。
关键词:无人机,自力起飞,火箭助推发射,滑跑起飞,垂直起降中图分类号:V279;TJ8文献标识码:ADOI :10.3969/j.issn.1002-0640.2019.04.002引用格式:叶帅辰,姚晓先.无人机自力起飞方式研究[J ].火力与指挥控制,2019,44(4):6-11.无人机自力起飞方式研究叶帅辰,姚晓先(北京理工大学宇航学院,北京100081)Self-power Take-off Method ofUnmanned Aerial Vehicles (UAVs )YE Shuai-chen ,YAO Xiao-xian(School of Aerospace Engineering ,Beijing Institute of Technology ,Beijing 100081,China )Abstract :Current self -power take -off methods of UAVs are enumerated.The characteristics ,working principles and flaws of each methods are presented.Current states of self-power UAVs ’take-off at home and aboard are introduced.Different kinds of self -power UAVs ’take -off methods are compared and future developing trend of UAVs ’taking off is prospected.Key words :unmanned aerial vehicles ,self-power take-off ,rocket boosting launch ,taxiing take-off ,vertical take-off and landCitation format :YE S C ,YAO X X.Self-power take-off method of Unmanned Aerial Vehicles (UAVs )[J ].Fire Control &Command Control ,2019,44(4):6-11.0引言无人机的概念是美国在20世纪20年代提出的,世界上第一架无人机“Kettering Bug ”由美国陆军通讯部队(Army Signal Corps )于1918年研制成功,最初无人机的作用较为单一,常被作为航空炸弹使用。
AOPA无人机理论考试题库
序号问题内容选项A选项B 14786001.无人机的英文缩写是 UVS US14787002.轻型无人机,是指空机质量小于7kg大于7kg,小于116kg14788003近程无人机活动半径在小于15km 15~50km 14789004任务高度一般在0~100m之间的无人机为超低空无人机低空无人机14790005不属于无人机机型的是塞纳斯侦察兵14791006不属于无人机系统的是飞行器平台飞行员14792007常规固定翼/旋翼平台是大气层内飞行的空气的航空器重于轻于14793008不属于抵消旋翼机反转力矩的方法有尾桨共轴旋翼14794009多轴旋翼飞行器通过改变______控制飞行轨迹。
总距杆转速14795010目前主流的民用无人机所采用的动力系统通常为活塞式发动机和两种。
涡喷发动机涡扇发动机14796011活塞发动机系统常采用的增压技术主要是用来。
提高功率减少废气量14797012电动动力系统主要由动力电机.动力电源和_____组成。
电池调速系统14798013从应用上说,涡桨发动机适用于。
中低空.低速短距/垂直起降无人机高空长航时无人机/无人战斗机14799014属于无人机飞控子系统的是无人机姿态稳定与控制无人机任务设备管理与控制14800015不属于无人机飞控子系统所需信息的是经/纬度姿态角14801016不应属于无人机飞控计算机任务范畴的是数据中继姿态稳定与控制14802017无人机通过控制舵面和发动机节风门来实现无人机控制。
伺服执行机构操纵杆14803018无人机电气系统中电源和两者组合统称为供电系统。
用电设备配电系统14804019无人机搭载任务设备重量主要受限制。
飞机自重飞机载重能力14805020无人机配平的主要考虑是沿纵轴的前后位置气动焦点发动机14806021无人机计算装载重量和重心的方法主要有:计算法.图表法和______。
试凑法查表法14807022指挥控制与_____是无人机地面站的主要功能飞行状态监控任务规划14808023无人机地面站系统不包括机载电台无人机控制站14809026不属于无人机起飞方式的是弹射滑跑14810027不属于无人机回收方式的是伞降飘落14811028无人机在控制增稳飞行控制模式下,期间飞控子系统控制。
无人机的发射技术

无人机的发射技术
无人机的发射技术主要分为三种:自动发射、手动发射和滑翔发射。
1. 自动发射:自动发射是指无人机在发射前,由操控员进行操控,使之从起飞台上起飞,
利用计算机自动控制的发射技术。
2. 手动发射:手动发射是指操控员使用手动操控杆,在发射前将无人机从起飞台上发射出去,这种发射方式比较简单,但是飞行的精度较低。
3. 滑翔发射:滑翔发射是指操控员将无人机从起飞台上抛出,然后利用无人机的滑翔性能,使之自动起飞。
这种发射方式不需要操控员进行操控,但是需要较高的技术要求,发射成
功率较低。
无人机飞行原理题库

无人机飞行原理题库(总13页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--飞行原理题库1、对于带襟翼无人机,放下襟翼,飞机升力将_,阻力将_.A、增大,减小B增大、增大C减小、减小答案:B2、对于带襟翼无人机,放下襟翼,飞机的失速速度将A、增大B、减小C、不变答案:B3、相同迎角,飞行速度增大一倍,阻力增加为原来的A、一倍B、二倍C、四倍答案:C4、通过改变迎角,无人机驾驶员可以控制飞机的A、升力、空速、阻力B、升力、空速、阻力、重量C、升力、拉力、阻力答案:A5、放全襟翼下降,无人机能以A、较大的下降角,较小的速度下降B、较小的下降角,较大的速度下降C、较大的下降角,较大的速度答案:A6、无人机驾驶员操纵副翼时,飞行器将绕A、横轴运动B、纵轴运动C、立轴运动答案:B7、无人机飞行员操纵升降舵时,飞行器将绕A、横轴运动B、纵轴运动C、立轴运动答案:A8、无人机飞行员操纵方向舵时,飞行器将绕A、横轴运动B、纵轴运动C、立轴运动答案:C9、舵面遥控状态时,平飞中向右稍压副翼杆量,无人机A、右翼升力大于左翼升力B、左翼升力大于右翼升力C、左翼升力等于右翼升力答案:B10、舵面瑶控状态时,平飞中向前稍推升降舵杆量,飞行器的迎角A、增大B、减小C、先减小后增大答案:B11、舵面遥控状态时,平飞中向后稍拉升降舵杆量,飞行器的迎角A、增大B、减小C、先增大后减小答案:A12、飞机的下滑角是A、升力与阻力的夹角B、飞行轨迹与水平面的夹角C、阻力与重力平面的夹角答案:B13、飞机获得最大下滑距离的速度是A、最大下滑速度B、失速速度C下滑有利速度答案:C14、下滑有利速度使A、飞机下滑阻力最小B、飞机下滑角最大C、飞机下滑升力最大答案:A15、用下滑有利速度下滑,飞机的A、升阻比最大B、升力最大C、下滑角最大答案:A(升力不变,阻力变小)16、在定高直线飞行中,下面关于飞机升力的说法,正确的是A、空速小时必须减小迎角,以产生适当的升力来保持高度B、空速大时必须减小迎角,以产生适当的升力来保持高度C、空速大时必须增大迎角,以产生适当的升力来保持高度答案:B17、关于平凸翼型的剖面形状,下面说法正确的是A、上下翼面的弯度相同B、机翼上表面的弯度小于下表面的弯度C、机翼上表面的弯度大于下表面的弯度答案:C18、空速适度减小时,为保持高度,应实施的操纵是A、增大迎角,使升力的增加大于阻力的增加B、增大迎角,以保持升力不变C、减小迎角,以保持阻力不变。