车牌识别程序(带注释)
车牌识别流程

车牌识别流程
车牌识别是一种通过图像处理技术识别车辆车牌号码的技术,
它可以广泛应用于停车场管理、交通违章监测、智能交通系统等领域。
下面将介绍车牌识别的流程。
首先,车牌识别的流程通常包括图像获取、图像预处理、车牌
定位、字符分割和字符识别五个步骤。
图像获取是车牌识别的第一步,它通过摄像头获取车辆的图像。
在图像获取的过程中,需要考虑光线、角度、距离等因素,以确保
获取清晰、准确的车牌图像。
接下来是图像预处理,这一步是为了提高车牌图像的质量,包
括去噪、灰度化、边缘检测、图像增强等处理。
通过图像预处理,
可以使车牌图像更加清晰,有利于后续的车牌定位和字符识别。
第三步是车牌定位,也称为车牌检测,其目的是在经过预处理
的图像中准确定位出车牌的位置。
车牌定位通常采用边缘检测、形
态学处理、颜色定位等技术,以找到车牌的位置和大小。
然后是字符分割,即将定位到的车牌图像中的字符进行分割。
字符分割是车牌识别中比较困难的一步,因为不同车牌的字符数量和形状各异,需要通过算法来准确分割出每个字符。
最后一步是字符识别,也称为光学字符识别(OCR),其目的是对分割后的字符进行识别。
字符识别通常采用模式识别和机器学习算法,将字符映射成文本信息。
总的来说,车牌识别流程包括图像获取、图像预处理、车牌定位、字符分割和字符识别五个步骤。
通过这些步骤,可以实现对车辆车牌号码的准确识别,为智能交通系统和车辆管理提供便利。
智能车牌识别操作使用说明书
智能车牌识别停车场系统操作使用说明书(管理员)2016年8月7日目录1.停车场软件操作 (3)1.1 软件的登陆 (3)1.2 系统基础参数设置 (2)1.3 下位机设置 (15)1.4 设置与本机相连的下位机 (31)1.5 收费方式设置 (34)1.6 包月车发行 (38)1.7 进入监控操作 (45)2 报表查询 (55)3 其他功能设置 (65)3.1 用户及权限设置 (65)3.2 黑名单设置 (69)3.3 军警以及特殊车辆设置 (71)4 日常业务模块 (73)5 查询软件版本 (77)1.停车场软件操作1.1软件的登陆1)运行软件的安装包,安装好软件。
2)创建好数据库后,点击图标打开软件如图示1图示13)出现智能停车场管理系统登录窗口,如图示2,输入用户编号101,点击三次回车,进入软件操作界面。
或者输入用户编号101后,直接点击“确定”按钮进入软件操作界面如图示3。
图示2图示31.2系统基础参数设置1)打开系统设置中的系统基础参数设置如图示1图示1进入系统基础参数设置界面,如图示2。
图示22)包月车续费设置可选择“不可以手动修改有效期”和“可以手动修改有效期”如图示3。
图示3此选择影响到以后发放月卡时,有效期可否进行手动更改,默认选择“不可以手动修改有效期”如图示4图示5标记○1。
图示4图示53)视频类型设置,默认“网络摄像机”,拍照延时最佳效果范围300ms到600ms,一般默认300ms如图示6。
图示64)车牌识别设置,可选择“实时车牌软识别”或者“压地感车牌软识别”如图示7。
如果是使用压地感识别功能则需选择“压地感车牌软识别”。
默认“实时车牌软识别”。
○1有效期修改区域图示75)使馆车、个性车、双层军警车如需启用识别需选择“启动识别”,否则这类车型是不识别的。
默认“都不启动识别”。
6)出口小票打印设置,当使用打印机的时候需设定此项,如图示8,建议使用8厘米类型打印机。
默认是“不打印”。
车牌识别简易说明书
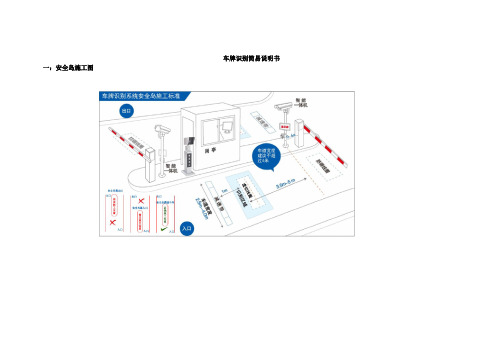
车牌识别简易说明书一:安全岛施工图
二:拓扑图
三:脱机车牌识别控制板接线图
四:电脑IP设置
注意:如果电脑IP不在零网段,请务必为电脑在添加个零网段的IP,例如上图添加完以后电脑一般有两个IP地址
五:相机IP地址设置
六:触发线及焦距设置
IE浏览器地址栏直接输入相机IP地址回车
注:正确设置
注:错误的设置
七:串口推送设置
注意:这里的串口1和串口2的波特率请设置为115200后点确认
注意:串口推送配置的每个选项的排序不能乱必须跟图片一样
八:停车场软件设置
第一步:添加出入口控制机号
注:添加”控制类型”必须填写正确
第二步: 设置通讯方式
第三步:设置车道及车牌识别选项
第四步:设置户外屏参数
第五步:加载时间,收费标准
八:车辆授权
九:进入在线监控
十:微信支付设置
注意:如果场内有停车自助缴费终端机的话,这请务必添加终端机。
车牌识别的matlab程序-(详细注释,并有使用注意点)

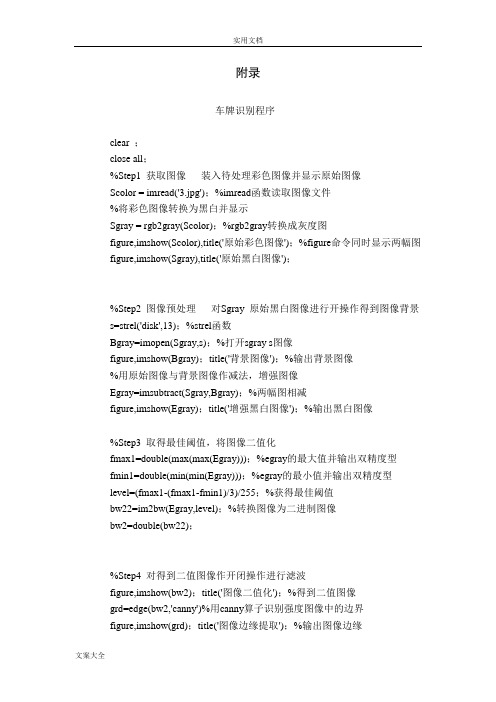
附录车牌识别程序clear ;close all;%Step1 获取图像装入待处理彩色图像并显示原始图像Scolor = imread('3.jpg');%imread函数读取图像文件%将彩色图像转换为黑白并显示Sgray = rgb2gray(Scolor);%rgb2gray转换成灰度图figure,imshow(Scolor),title('原始彩色图像');%figure命令同时显示两幅图figure,imshow(Sgray),title('原始黑白图像');%Step2 图像预处理对Sgray 原始黑白图像进行开操作得到图像背景s=strel('disk',13);%strel函数Bgray=imopen(Sgray,s);%打开sgray s图像figure,imshow(Bgray);title('背景图像');%输出背景图像%用原始图像与背景图像作减法,增强图像Egray=imsubtract(Sgray,Bgray);%两幅图相减figure,imshow(Egray);title('增强黑白图像');%输出黑白图像%Step3 取得最佳阈值,将图像二值化fmax1=double(max(max(Egray)));%egray的最大值并输出双精度型fmin1=double(min(min(Egray)));%egray的最小值并输出双精度型level=(fmax1-(fmax1-fmin1)/3)/255;%获得最佳阈值bw22=im2bw(Egray,level);%转换图像为二进制图像bw2=double(bw22);%Step4 对得到二值图像作开闭操作进行滤波figure,imshow(bw2);title('图像二值化');%得到二值图像grd=edge(bw2,'canny')%用canny算子识别强度图像中的边界figure,imshow(grd);title('图像边缘提取');%输出图像边缘bg1=imclose(grd,strel('rectangle',[5,19]));%取矩形框的闭运算figure,imshow(bg1);title('图像闭运算[5,19]');%输出闭运算的图像bg3=imopen(bg1,strel('rectangle',[5,19]));%取矩形框的开运算figure,imshow(bg3);title('图像开运算[5,19]');%输出开运算的图像bg2=imopen(bg3,strel('rectangle',[19,1]));%取矩形框的开运算figure,imshow(bg2);title('图像开运算[19,1]');%输出开运算的图像%Step5 对二值图像进行区域提取,并计算区域特征参数。
车牌识别地matlab程序--详细注释,并有使用注意点
附录车牌识别程序clear ;close all;%Step1 获取图像装入待处理彩色图像并显示原始图像Scolor = imread('3.jpg');%imread函数读取图像文件%将彩色图像转换为黑白并显示Sgray = rgb2gray(Scolor);%rgb2gray转换成灰度图figure,imshow(Scolor),title('原始彩色图像');%figure命令同时显示两幅图figure,imshow(Sgray),title('原始黑白图像');%Step2 图像预处理对Sgray 原始黑白图像进行开操作得到图像背景s=strel('disk',13);%strel函数Bgray=imopen(Sgray,s);%打开sgray s图像figure,imshow(Bgray);title('背景图像');%输出背景图像%用原始图像与背景图像作减法,增强图像Egray=imsubtract(Sgray,Bgray);%两幅图相减figure,imshow(Egray);title('增强黑白图像');%输出黑白图像%Step3 取得最佳阈值,将图像二值化fmax1=double(max(max(Egray)));%egray的最大值并输出双精度型fmin1=double(min(min(Egray)));%egray的最小值并输出双精度型level=(fmax1-(fmax1-fmin1)/3)/255;%获得最佳阈值bw22=im2bw(Egray,level);%转换图像为二进制图像bw2=double(bw22);%Step4 对得到二值图像作开闭操作进行滤波figure,imshow(bw2);title('图像二值化');%得到二值图像grd=edge(bw2,'canny')%用canny算子识别强度图像中的边界figure,imshow(grd);title('图像边缘提取');%输出图像边缘bg1=imclose(grd,strel('rectangle',[5,19]));%取矩形框的闭运算figure,imshow(bg1);title('图像闭运算[5,19]');%输出闭运算的图像bg3=imopen(bg1,strel('rectangle',[5,19]));%取矩形框的开运算figure,imshow(bg3);title('图像开运算[5,19]');%输出开运算的图像bg2=imopen(bg3,strel('rectangle',[19,1]));%取矩形框的开运算figure,imshow(bg2);title('图像开运算[19,1]');%输出开运算的图像%Step5 对二值图像进行区域提取,并计算区域特征参数。
车牌识别(含程序)

图形通信论文--基于matlab的车牌检测设计学院:信息科学科学与工程学院班级:姓名:爱捆得宠学号:指导老师:2013年6月15日摘要车牌识别系统使车辆管理更智能化,数字化,有效的提升了交通管理的方便性和有效性。
车牌识别系统主要包括了图像采集、图像预处理、车牌定位、车牌分割、字符识别等五大核心部分。
本文主要介绍车牌的检测部分,即图像预处理、车牌定位模块的实现方法。
本文的图像预处理模块是将图像灰度化和用Roberts算子进行边缘检测的步骤。
车牌定位和分割采用的是利用数学形态法来确定车牌位置,再利用车牌彩色信息的彩色分割法来完成车牌部位分割。
本文即是针对其核心部分进行阐述并使用MATLAB软件环境中进行字符分割的仿真实验。
关键词:MATLAB、图像预处理、车牌定位、车牌分割1、模块及其作用车牌检测的整体模块框图如下图1所示:图1.整体模块图1.1.灰度化汽车图像样本目前大都是通过摄像机、数码相机等设备拍摄获取的,因而预处理前的图像都是彩色图像。
真彩色图像又称RGB图像,它是利用R、G、B分量表示一个像素的颜色,R、G、B分别代表红、绿、蓝3种不同的颜色,通过三基色可以合成出任意颜色。
而每个分量有255种值可取,这样一个像素点可以有,1600多万(255*255*255)的颜色的变化范围。
而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,每一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。
灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。
所以,对一个尺寸为m*n的彩色图像来说,存储为一个m*n*3的多维数组。
彩色图像包含着大量的颜色信息,不但在存储上开销很大,而且在处理上也会降低系统的执行速度。
由于图像的每个象素都具有三个不同的颜色分量,存在许多与识别无关的信息,不便于进一步的识别工作,因此在对图像进行识别等处理中,经常将彩色图像转变为灰度图像,以加快处理速度。
车牌识别一体机系统说明书
车牌辨认一体机系统阐明书一. 车牌辨认概述 (3)二、车牌辨认安装前注意事项 (5)1.计算机最低配置要求 (4)2.现场安装位置最低要求尺寸 (4)三、布线图 (7)1.原则一进一出布线图 (6)2.单通道一进一出布线图 (7)3.出入口分开布线图 (7)4.现场安装角度及辨认距离参照对比图 (8)5.摄像机尾板接线图 (9)6.设备接线图 (9)四. 车牌辨认一体机安装环节 (10)1. 固定摄像机立柱 (10)2. 补光灯支架安装及补光灯安装 (10)3. 鸭嘴 (10)4. 摄像机安装 (10)五. 三步轻松完毕摄像机参数设置 (11)第一步: 设置安装引导 (12)第二步: 摄像机IP地址设置 (12)第三步: 设置输入输出 (13)六、摄像机参数 (15)1. 储存管理 (14)2. 智能分析 (14)3. 顾客管理 (15)4. 摄像机在IE浏览器上看不到视频设置环节 (16)5. 设备常见故障处理 (16)七. 数据库安装环节阐明 (17)八. 软件安装环节 (21)1. 选择安装文件 (21)2. 双击运营安装程序 (21)3. 创建数据库 (25)4. 运营视频注册控件 (25)九. 管理软件操作阐明 (26)1. 双击运营桌面图标 (26)2. 选择管理员登录 (26)十、软件主界面三步设置 (28)1.参数设置 (27)2.道口设置 (30)3.顾客类型及收费设置 (30)十一. 系统管理及停车管理 (32)1. 密码修改 (32)2. 顾客管理 (32)3.. 数据库维护 (34)4. 操作日志 (36)5. 车主档案管理 (36)6. 在线收费 (39)7. 单位设置 (39)十二. 统计查询与报表输出 (40)1. 月租顾客缴费统计 (40)2. 预付款顾客充值统计 (41)3. 临时停车收费统计 (41)4. 交班统计 (42)5. 预付款余额查询 (42)6. 固定顾客图像对比统计 (42)7. 消费减免统计 (42)8. 车辆刷卡统计 (42)9. 场内车查询 (42)十三. 安装时故障排除 (42)1. 局域网网络旳组建 (42)2. 安装SQL2023数据库提醒挂起 (51)3. 一键共享软件52一. 车牌辨认概述在当代化停车场管理中, 涉及到各方面旳管理, 其中车辆旳管理是一种主要旳方面。
车牌识别系统的工作流程

车牌识别系统的工作流程
伴随“互联网+”时代的到来,停车场越来越智能化,今天小编就为大家介绍下,智能车牌识别系统是通过怎样的流程实现智慧停车的。
以易泊的车牌识别系统为例:
当您的车辆进入或者驶出,触发地感线圈时,车牌识别摄相机抓取触发时图像进行单帧车牌号码识别,得出车牌号码并提交。
车辆进入:
①车辆驶入车牌摄像机抓拍区域,触发地感线圈;
②智能车牌识别系统自动识别车牌号码并抓拍图像;
③系统自动辨认您的爱车是临时车辆还是固定用户车辆;
④如果是固定车辆,闸机放行,同时记下车辆进入时间,显示
屏显示该车的有效期;
⑤如果是临时车辆,闸机放行,同时记下车辆进入时间;
⑥整个过程自动完成,无须工作人员干预。
车辆一直处于低速
行驶状态,无需暂停。
车辆离开:
①车辆驶入车牌摄像机抓拍区域,触发地感线圈;
②智能车牌识别系统自动识别车牌号码并抓拍图像;
③系统自动辨认是临时车辆还是固定用户车辆;
④如果是固定车辆,道闸放行;
⑤如果是临时车辆,系统会显示停留时间,缴费,道闸放行;
⑥显示屏祝您一路顺风等提示语;
⑦如果车辆被列入黑名单,不管是临时还是固定车辆,闸机不会打开,同时系统都会发出报警信号,通知工作人员注意。
就是这样一个轻松而又严谨的过程,使得您的整个停车过程方便快捷,让原本“拥堵”的心情瞬间舒畅!。
车牌识别项目流程

车牌识别项目流程车牌识别项目流程主要包括以下步骤:1. 车辆检测跟踪:主要对视频流进行分析,判断其中车辆的位置,对图像中的车辆进行跟踪,并在车辆位置最佳时刻,记录该车辆的特写图片。
2. 车牌定位:首先对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为牌照区域,并将其从图象中分割出来。
3. 车牌矫正及精定位:由于受拍摄条件的限制,图像中的车牌总不可避免存在一定的倾斜,需要一个矫正和精定位环节来进一步提高车牌图像的质量,为切分和识别模块做准备。
4. 车牌切分:利用车牌文字的灰度、颜色、边缘分布等各种特征,能较好地抑制车牌周围其他噪声的影响,并能容忍一定倾斜角度的车牌。
5. 牌照字符分割:将牌照区域分割成单个字符,然后进行识别。
字符分割可以进行水平扫描和垂直扫描将字符分开,水平扫描确定图片的上下限,垂直扫描可以确定图片中字符的左右坐标。
6. 牌照字符识别:识别方法主要有基于模板匹配算法和基于人工神经网络算法。
7. 车牌识别结果决策:利用一个车牌经过视野的过程留下的历史记录,对识别结果进行智能化的决策。
通过计算观测帧数、识别结果稳定性、轨迹稳定性、速度稳定性、平均可信度和相似度等度量值得到该车牌的综合可信度评价,从而决定是继续跟踪该车牌,还是输出识别结果,或是拒绝该结果。
这种方法综合利用了所有帧的信息,减少了以往基于单幅图像的识别算法所带来的偶然性错误,大大提高了系统的识别率和识别结果的正确性和可靠性。
8. 车牌跟踪:记录下车辆行驶过程中每一帧中该车车牌的位置以及外观、识别结果、可信度等各种历史信息。
由于车牌跟踪模块采用了具有一定容错能力的运动模型和更新模型,使得那些被短时间遮挡或瞬间模糊的车牌仍能被正确地跟踪和预测,最终只输出一个识别结果。
9. 在线学习模块:在以上各个模块中,使用了大量基于学习的算法,系统特别添加在线学习模块,采用最新的反馈型学习模型,利用决策模块和跟踪模块得到的车牌质量、车辆轨迹、速度等反馈信息,智能化地更新一些算法参数,使得系统能快速适应新的应用环境。
车牌识别程序 ----可直接运行
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargtion gui_OpeningFcn(hObject, eventdata, handles, varargin)
1.GUI 主程序源程序
function varargout = gui(varargin)
gui_Singleton = 1;
gui_State = struct('gui_Name',
mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @gui_OpeningFcn, ...
myI=double(I5);
tic
%tic 计时开始,toc 结束
Blue_y=zeros(y,1);%产生一个 y*1 的零针
for i=1:y
for j=1:x
if(myI(i,j,1)==1)%如果 myI 图像坐标为(i,j)点值为 1,背景颜色蓝色,blue 加一
Blue_y(i,1)=Blue_y(i,1)+1;%蓝色像素点统计
% ======================图像处理=============================== function pushbutton2_Callback(hObject, eventdata, handles) I=handles.I; I1=rgb2gray(I); I2=edge(I1,'roberts',0.18,'both'); axes(handles.axes2); imshow(I1);title('灰度图'); axes(handles.axes3); imshow(I2);title('边缘检测'); se=[1;1;1];
V9.0智能车牌识别(用户)操作使用说明书

目录9.0软件主界面下拉菜单模块 ________________________________ 3第1步一、车场设备调试的基本步骤 ______________________ 5第2步二、软件使用准备工作及检查设备通电情况。
________ 5三、数据库的安装流程 _____________________________________ 6i.数据库的安装 _________________________________________________ 6四、数据库配置_______________________________________________ 14五、登录操作系统 ________________________________________ 151.系统配置向导 ______________________________________________ 162.添加修改显示屏: __________________________________________ 203.添加相机设备 ______________________________________________ 214.添加修改车道 ______________________________________________ 235. 车辆管理____________________________________________________ 255.1、车辆单个授权______________________________________________ 255.2.一位多车 _________________________________________________ 265.3、批量授权_________________________________________________ 266.人事管理_____________________________________________________ 276.4删除部门 ___________________________________________________ 287.人事信息_____________________________________________________ 287.1添加人事资料 _______________________________________________ 288.车辆延期_____________________________________________________ 298.2车辆充值、退款 _____________________________________________ 3111.车辆退卡____________________________________________________ 3812.黑/白名单下载 _______________________________________________ 4014.添加操作员__________________________________________________ 44115.车辆授权报表查询____________________________________________ 4516. 发生金额报表查询___________________________________________ 4617.场内车辆报表查询____________________________________________ 4618.车辆收费报表查询____________________________________________ 47 20.值班操作员在线监控使用操作_________________________________ 48239.0软件主界面下拉菜单模块4第1步一、车场设备调试的基本步骤参考文献资料车牌识别G款说明书(印刷版)第2步二、软件使用准备工作及检查设备通电情况。
车牌识别软件设置说明书
车牌识别软件设置说明书安装软件之前的注意事项:1、本软件支持XP和WIN7操作系统,如果是WIN7的操作系统,必须是旗舰版的32位系统,桌面背景一定要选经典背景。
2、计算机的网段,一定要跟摄像机的网段一致。
IP不能冲突。
3、详细看说明书,看视频介绍。
一、安装软件:。
软件安装双击桌面软件打开软件如图二、工作站端设置图片1.21.单击鼠标左键系统菜单下工作站端设置如图1.3图片1.32.右侧删除全部命令。
如图1.4。
温馨提示:删除成功。
图片1.43.单击右上角添加按钮,图片1.54.单击添加按钮后,如图1.5图片 1.5 图片 1.65.拓扑结构,单机模式:如图1.6,红色范围内的一台计算机连接一进一出、或连接多个摄像机称为单机模式。
6.服务器|客户模式:是多台计算机(至少两台)进行操作控制器,选择服务器|客户模式添加数据库2005,服务器名称改为你的服务器名称如图1.7。
如一台计算机想用服务器客户模式把服务器名称输入本机。
图片1.7错误提示:如你计算机属于单击模式,而选择服务器模式,会出现以下图片提示。
出现以上图片提示请把服务器模式改回单击模式。
图片1.87. (1)防潜回“关”,防潜回这一项的意思是:这辆车从进口入,如果出口没有刷卡,下次在进入不允许进。
如果在前面打上√号,代表这辆车可以随意进出。
(2)时租车收费抬杆次数限制“关”这一项的意思是:临时车进入一次,当这辆车到出口的时候道闸杆不会抬起,因为要进行对他收费,然后给他人工抬闸。
他才可以去。
(3)允许人工开闸和关闸这项的意思是:如果把这项打上√,收费员可以在主页面进行手动抬闸,如果没有选择就是收费员不可以进行手动抬闸。
(4)人口时租车识别正确自动开闸:8.按单位客户车位总数限制:是对业主车辆数的限制。
其余三个功能根据现场需求进行设定。
9. 主界面(视图):你的停车场通道属于哪种类型就选择哪种,一定要选一进一出高清ZS视图10.默认车牌号首字母这项的意思是:针对临时来的车辆本地开始外地,对他进行收费规则,按时、按次、按段、跨段等等。
车牌识别操作指南规范
车牌识别系统操作指南前言车牌识别技术〔LicensePlateRecognition,LPR〕以计算机技术、图像处理技术、模糊识别为根底,建立车辆的特征模型,识别车辆特征,如号牌、车型、颜色等。
它是一个以特定目标为对象的专用计算机视觉系统,能从一幅图像中自动提取车牌图像,自动分割字符,进而对字符进行识别,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数字、字母及汉字字符,并直接给出识别结果,使得车辆的电脑化监控和管理成为现实。
车牌识别系统极大的提高了车场管理效率,节约本钱和时间,但它并不是完全的无人值守,车场软件也需要人工简单的操作,具体操作如下。
管理员篇管理员具有软件操作的最高权限,一般分为车辆信息录入、续费、报表查询几个方面。
车辆信息录入操作步骤:依次点击系统菜单-系统设置-固定车设置及收费。
在弹出的窗口中点击增加-填写编号、姓名等车辆信息-点击保存-输入关联编号点击关联编号续费。
1.点击续费-输入续费后有效期-点击确定完成车辆信息的录入。
注:操作员在操作续费时,实收金额处如不收取费用那么不用填写,默认为0,如收取了费用那么填写应收金额,实收金额,因为这些数字会表达在报表中,以便保持报表的真实性。
过期车辆续费操作步骤1.在人员信息设置里依次点击人员查找-字段选择查找条件-输入查询字段值如车牌号。
2.3.找到需要续费的车辆信息点击“车辆续费〞按钮在续费窗口点击“续费〞按钮,调整车辆续费后有效期,点击“确定〞按钮,完成车辆续费工作。
注:操作员在操作续费时,实收金额处如不收取费用那么不用填写,默认为0,如收取了费用那么填写应收金额,实收金额,因为这些数字会表达在报表中,以便保持报表的真实性。
报表查询依次点击“系统菜单〞-“报表查询〞根据要查询内容点击相应的按钮。
操作员篇操作员一般为车场岗亭执勤人员,操作员的软件日常操作有错误车辆修正、车辆无法入场情况处理、临时车收费。
简述车牌识别流程
简述车牌识别流程车牌识别是一种利用计算机视觉技术来自动识别车辆车牌的过程。
随着计算机视觉技术的迅速发展,车牌识别系统已经广泛应用于交通管理、安防监控、智能停车场等领域。
本文将简要介绍车牌识别流程,并介绍一些常用的车牌识别算法。
车牌识别流程概述车牌识别的流程通常包括以下几个主要步骤:1.图像获取:通过摄像头、监控摄像机等设备获取车辆图像。
2.图像预处理:对获取的车辆图像进行预处理,去除噪声、调整亮度、对比度等。
3.车牌定位:在预处理后的图像中使用车牌定位算法,找到车牌所在的位置。
4.车牌分割:将定位到的车牌区域分割成每个字符。
5.字符识别:对分割后的字符进行识别,将其转换为文本。
6.车牌识别结果输出:将识别出的车牌输出为文本或其他形式的结果。
图像获取图像获取是车牌识别系统的起点。
通常使用摄像头或监控摄像机来获取车辆图像。
这些设备通常会以特定的帧率连续捕捉图像,并将其传递给后续的处理步骤。
图像预处理在图像获取后,需要对图像进行预处理以减少噪声、调整亮度和对比度,以便更好地进行后续的车牌定位和字符识别。
常用的图像预处理技术包括灰度化、滤波、直方图均衡化等。
车牌定位车牌定位是在预处理后的图像中找到车牌所在的区域。
这个步骤通常需要使用一些车牌定位算法,如基于颜色的方法、基于形状的方法等。
这些算法根据车牌特点进行区域检测和筛选,最终找到车牌的位置。
车牌分割车牌分割是将定位到的车牌区域分割成每个字符的过程。
常用的车牌分割算法包括基于垂直投影的方法、基于连通区域分析的方法等。
这些方法通过对车牌区域的像素进行分析和判断,将车牌分割成单个字符。
字符识别字符识别是将分割后的车牌字符识别为文本的过程。
字符识别通常使用机器学习算法,如支持向量机、神经网络等。
这些算法通过训练模型来对字符进行识别,将其转换为文本。
车牌识别结果输出车牌识别结果可以以文本形式输出,也可以将车牌号码与其他信息一并输出。
根据实际需求,可以将车牌识别结果用于不同的应用场景,如交通管理、安全监控等。
平安顺车牌识别硬识别软件操作功能说明资料
软件操作功能说明停车场管理系统默认含管理员组、操作员组、财务组。
管理员组享有最高权限,主要负责系统维护,财务组主要负责车牌登记和查找报表,操作员组主要负责对进出车辆的收费和管理。
一、管理员组使用“管理员”,其权限所属“管理员权限组”,享有最高权限。
使用前必须通过系统默认的管理员身份登陆,添加操作员和财务人员,并分配好权限。
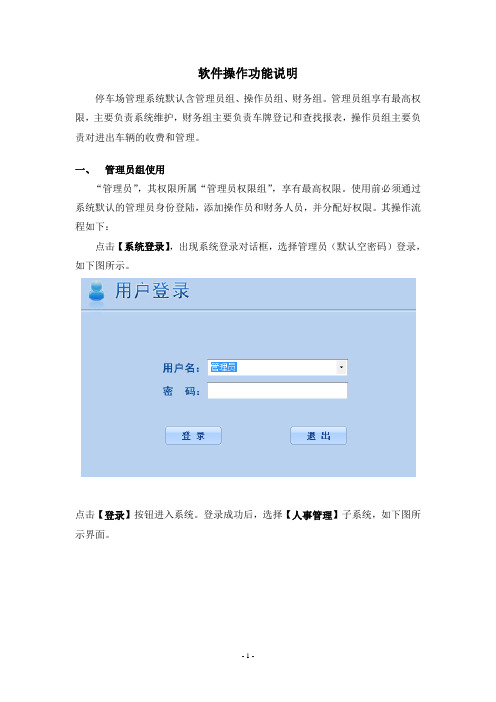
其操作流程如下:点击【系统登录】,出现系统登录对话框,选择管理员(默认空密码)登录,如下图所示。
点击【登录】按钮进入系统。
登录成功后,选择【人事管理】子系统,如下图所示界面。
点击【部门信息】栏对部门资料进行管理,增加、修改或删除部门资料。
点击【人事信息】栏,对人事资料进行管理,增加、删除或修改人事资料。
双击选中信息弹出资料修改界面。
注意:添加操作员的时候,系统默认操作员编号是80001-80099之间。
点击“系统管理子系统”里面的【权限组管理】栏,进入权限组管理界面:系统默认操作员和财务组权限,可以根据实际需求更改具体的权限,点击【保存】然后点击“系统管理子系统”里面的【操作员管理】栏,进入操作员管理界面,将在人事信息中添加的操作员添加到对应的组。
在界面中选择操作员姓名,然后选择赋予的权限组点击保存按钮就可以完成操作员权限管理。
二、财务组使用月租车车牌登记2.1、在【ID卡发行】发行月租车、月租车信息修改和月租车退卡发行月租车:按规律在十进制卡号栏输入一个数字,按回车键,软件自动将改数字转化为八位数的十六进制卡号。
当卡片状态为未使用,即可发行月租车信息修改和月租车退卡:在卡片报表里查询到须要修改的月租车十六进制卡号,输入十六进制卡号,按回车键,可以查看到当前车牌信息,可以点击退卡按钮,也可以修改信息后点击改卡。
须要进行退卡下载才能清空已退卡的控制机月租车信息2.2、在【车牌登记】进行月租车发行、信息修改、延期和退卡在【卡片管理】或【在线监控界面】点击【车牌登记】出现如下图所示界面:发行月租车:点击新增即可发行月租车,图中红色区域必填,把必填填完后须要保存,系统提示:车牌登记成功月租车退卡:选择下方须要退卡的车牌点击【注销车牌】即可,注销后变为临时车,须要进行退卡下载才能清空已退卡的控制机月租车信息月租车延期:右边的输入框输入对应的数据可以查出已登记的车牌,双击车牌可以延期(延期后重新下载到控制机生效)。
-基于matlab的车牌识别系统的设计(附程序+详解注释)

焦作大学毕业设计(论文)说明书作者:学号:学院(系):信息工程学院专业:通信技术题目:基于matlab的车牌识别系统的设计主题:指导教师:职称:讲师2012年12月摘要汽车车牌的识别系统是现代智能交通管理的重要组成部分之一。
车牌识别系统使车辆管理更智能化,数字化,有效的提升了交通管理的方便性和有效性。
车牌识别系统主要包括了图像采集、图像预处理、车牌定位、字符分割、字符识别等五大核心部分。
本文主要介绍图像预处理、车牌定位、字符分割三个模块的实现方法。
本文的图像预处理模块是将图像灰度化和用Roberts算子进行边缘检测的步骤。
车牌定位和分割采用的是利用数学形态法来确定车牌位置,再利用车牌彩色信息的彩色分割法来完成车牌部位分割。
字符的分割采用的方法是以二值化后的车牌部分进行垂直投影,然后在对垂直投影进行扫描,从而完成字符的分割。
本文即是针对其核心部分进行阐述并使用MATLAB软件环境中进行字符分割的仿真实验。
关键词:MATLAB、图像预处理、车牌定位、字符分割ABSTRACTVehicle license plate recognition system is one important of the modern intelligent traffic management. License plate recognition system to make more intelligent vehicle management, digital, Effective traffic management to enhance the convenience and effectiveness. License plate recognition system includes image acquisition, image preprocessing, license plate localization, character segmentation, character recognition and other five core parts. In this paper, preprocessing, license plate localization, character segmentation method for the realization of three modules.This is the image preprocessing module and the use of the image grayscale Roberts edge detection operator steps. License plate location and segmentation using mathematical morphology method is used to determine the license plate location,Re-use license plate color segmentation method of color information to complete the license plate area segmentation. Character segmentation approach is based on the license plate after thebinary part of the vertical projection, Then scan in the vertical projection, thus completing the character segmentation. This article is described for the core part and use the MATLAB software environment, the simulation experiments for character segmentation.Keywords: MATLAB software, image preprocessing, license plate localization, character segmentation .目录1. 绪论 (1)1.1 本课题的研究背景 (1)1.2 本课题的研究目的及意义 (2)1.3 国内外发展状况 (3)1.4 主要应用领域 (5)1.5 设计原理 (6)2. MATLAB简介 (7)2.1 MATLAB发展历史 (7)2.2 MATLAB的语言特点 (7)3.工作流程 (9)3.1 系统框架结构和工作流程 (9)4.各模块的实现 (11)4.1设计方案 (11)4.2图像预处理 (11)4.2.1图像灰度化 (11)4.2.2图像的边缘检测 (12)4.3车牌定位和分割 (14)4.3.1车牌的定位 (15)4.3.2车牌的分割 (16)4.3.3对定位后的彩色车牌的进一步处理 (17)4.4字符的分割和归一化处理 (17)4.4.1字符的分割 (18)4.4.2字符的归一化处理 (19)4.5 字符的识别 (19)5.实验结果和分析 (22)6.实验总结 (24)致谢 (25)参考文献 (26)程序附录 (27)第一章绪论1.1 本课题的研究背景现代社会已进入信息时代,随着计算机技术、通信技术和计算机网络技术的发展,自动化信息处理能力和水平不断提高,作为现代社会主要交通工具之一的汽车在人们的生产生活的各个领域得到大量使用,对他的信息进行自动采集和管理具有十分重要的意义,成为信息处理技术的一项重要研究课题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
function [d]=main(jpg)I=imread('car.jpg');figure(1),imshow(I);title('原图');I1=rgb2gray(I); %将真彩色图像转换为灰度图像figure(2),subplot(1,2,1),imshow(I1);title('灰度图');figure(2),subplot(1,2,2),imhist(I1);title('灰度图直方图');I2=edge(I1,'robert',0.08,'both'); %高斯滤波器,方差为0.08figure(3),imshow(I2);title('robert算子边缘检测')se=[1;1;1];I3=imerode(I2,se); %图像的腐蚀figure(4),imshow(I3);title('腐蚀后图像');se=strel('rectangle',[40,40]); %构造结构元素,以长方形构造一个seI4=imclose(I3,se); %对图像实现闭运算,闭运算也能平滑图像的轮廓,但与开运算相反,它一般融合窄的缺口和细长的弯口,去掉小洞,填补轮廓上的缝隙。
figure(5),imshow(I4);title('平滑图像的轮廓');I5=bwareaopen(I4,2000); %从二进制图像中移除所有少于p像素的连接的组件(对象),产生另一个二进制图像figure(6),imshow(I5);title('从对象中移除小对象');[y,x,z]=size(I5); %返回I5各维的尺寸,并存储在变量y、x、z中myI=double(I5); %换成双精度数值%begin横向扫描tic %计算tic与toc之间程序的运行时间Blue_y=zeros(y,1); %产生y*1的全0矩阵for i=1:yfor j=1:xif(myI(i,j,1)==1)%如果myI(i,j,1)即myI图像中坐标为(i,j)的点为蓝色%则Blue_y的相应行的元素white_y(i,1)值加1Blue_y(i,1)= Blue_y(i,1)+1;%蓝色像素点统计endendend[temp MaxY]=max(Blue_y);%temp为向量white_y的元素中的最大值,MaxY 为该值的索引(在向量中的位置)PY1=MaxY;while ((Blue_y(PY1,1)>=120)&&(PY1>1))PY1=PY1-1;endPY2=MaxY;while ((Blue_y(PY2,1)>=40)&&(PY2<y))PY2=PY2+1;endIY=I(PY1:PY2,:,:);%IY为原始图像I中截取的纵坐标在PY1:PY2之间的部分%end横向扫描%begin纵向扫描Blue_x=zeros(1,x);%进一步确定x方向的车牌区域for j=1:xfor i=PY1:PY2if(myI(i,j,1)==1)Blue_x(1,j)= Blue_x(1,j)+1;endendendPX1=1;while ((Blue_x(1,PX1)<3)&&(PX1<x))PX1=PX1+1;endPX2=x;while ((Blue_x(1,PX2)<3)&&(PX2>PX1))PX2=PX2-1;end%end纵向扫描PX1=PX1-2;%对车牌区域的校正PX2=PX2+2;dw=I(PY1:PY2,:,:);t=toc;figure(7),subplot(1,2,1),imshow(IY),title('行方向合理区域');figure(7),subplot(1,2,2),imshow(dw),title('定位剪切后的彩色车牌图像')imwrite(dw,'dw.jpg'); %将图像数据写入到图像文件中[filename,filepath]=uigetfile('dw.jpg','输入一个定位裁剪后的车牌图像');%读取jpg=strcat(filepath,filename); %将数组filepath,filename水平地连接成单个字符串,并保存于变量jpg中a=imread('dw.jpg'); %读取图片文件中的数据b=rgb2gray(a); %将真彩色图像转换为灰度图像imwrite(b,'1.车牌灰度图像.jpg'); %将图像数据写入到图像文件中figure(8);subplot(3,2,1),imshow(b),title('1.车牌灰度图像')g_max=double(max(max(b))); %换成双精度数值g_min=double(min(min(b))); %换成双精度数值T=round(g_max-(g_max-g_min)/3); % T 为二值化的阈值[m,n]=size(b); %返回矩阵b的尺寸信息,并存储在m、n中。
其中m中存储的是行数,n中存储的是列数。
d=(double(b)>=T); % d:二值图像imwrite(d,'2.车牌二值图像.jpg'); %将图像数据写入到图像文件中figure(8);subplot(3,2,2),imshow(d),title('2.车牌二值图像')figure(8),subplot(3,2,3),imshow(d),title('3.均值滤波前')% 滤波h=fspecial('average',3); %建立预定义的滤波算子,average指定算子的类型,3为相应的参数d=im2bw(round(filter2(h,d))); %转换为二值图像imwrite(d,'4.均值滤波后.jpg'); %将图像数据写入到图像文件中figure(8),subplot(3,2,4),imshow(d),title('4.均值滤波后')% 某些图像进行操作% 膨胀或腐蚀% se=strel('square',3); % 使用一个3X3的正方形结果元素对象对创建的图像膨胀% 'line'/'diamond'/'ball'...se=eye(2); % eye(n) returns the n-by-n identity matrix 单位矩阵[m,n]=size(d); %返回矩阵b的尺寸信息,并存储在m、n中。
其中m中存储的是行数,n中存储的是列数if bwarea(d)/m/n>=0.365 %计算二值图像中对象的总面积d=imerode(d,se); %图像的腐蚀elseif bwarea(d)/m/n<=0.235 %计算二值图像中对象的总面积d=imdilate(d,se); %实现膨胀操作endimwrite(d,'5.膨胀或腐蚀处理后.jpg'); %将图像数据写入到图像文件中figure(8),subplot(3,2,5),imshow(d),title('5.膨胀或腐蚀处理后')% 寻找连续有文字的块,若长度大于某阈值,则认为该块有两个字符组成,需要分割d=qiege(d); %切割[m,n]=size(d); %返回矩阵b的尺寸信息,并存储在m、n中。
其中m中存储的是行数,n中存储的是列数figure,subplot(2,1,1),imshow(d),title(n)k1=1;k2=1;s=sum(d);j=1;while j~=nwhile s(j)==0j=j+1;endk1=j;while s(j)~=0 && j<=n-1j=j+1;endk2=j-1;if k2-k1>=round(n/6.5)[val,num]=min(sum(d(:,[k1+5:k2-5])));d(:,k1+num+5)=0; % 分割endend% 再切割d=qiege(d);% 切割出7 个字符y1=10;y2=0.25;flag=0;word1=[];while flag==0[m,n]=size(d);left=1;wide=0;while sum(d(:,wide+1))~=0wide=wide+1;endif wide<y1 % 认为是左侧干扰d(:,[1:wide])=0;d=qiege(d);elsetemp=qiege(imcrop(d,[1 1 wide m]));[m,n]=size(temp);all=sum(sum(temp));two_thirds=sum(sum(temp([round(m/3):2*round(m/3)],:)));if two_thirds/all>y2flag=1;word1=temp; % WORD 1endd(:,[1:wide])=0;d=qiege(d);endend% 分割出第二个字符[word2,d]=getword(d);% 分割出第三个字符[word3,d]=getword(d);% 分割出第四个字符[word4,d]=getword(d);% 分割出第五个字符[word5,d]=getword(d);% 分割出第六个字符[word6,d]=getword(d);% 分割出第七个字符[word7,d]=getword(d);figure(9),imshow(word1),title('1');figure(10),imshow(word2),title('2');figure(11),imshow(word3),title('3');figure(12),imshow(word4),title('4');figure(13),imshow(word5),title('5');figure(14),imshow(word6),title('6');figure(15),imshow(word7),title('7');[m,n]=size(word1); %返回矩阵b的尺寸信息,并存储在m、n中。