电子皮带秤配料系统的模糊PID控制
电子皮带秤在配料系统中的维护与校验
电子皮带秤在配料系统中的维护与校验本文结合了5台电子皮带秤在实际使用中出现的情况,总结了如何对电子皮带秤进行使用和维护;对出现的故障给出了产生的原因,并结合实际例子,给出了故障的排除方法。
标签:配料系统;电子皮带秤;维护;校验莱钢集团矿山建设有限公司链篦机—回转窑氧化球团生产线于2004年7月建成投产,设计年产氧化球团60万吨。
在各生产工序中,配料处于生产工艺的第一道工序,根据原料结构的不同适时调整原料的配比来保证整个工艺的稳定。
因此原料配比的调控在整个生产过程中至关重要。
电子皮带称的运行精度与运行稳定性在配料系统的运行中起到关键作用。
我厂配料系统由5台带式称重给料机和1台螺旋式称重给料机组成,由徐州三原称重技术有限公司负责安装调试。
配料系统安装运行近10年来,经过日常维护计量误差仍保持在合理范围之内,系统运行稳定。
配料系统由称重控制显示器、工控机、称重程序、变频器组成,可通过控制显示器与变频器调速实现自动调节。
应用于配料系统的拉氏皮带称与用于其它场合的皮带秤的工作原理相同,日常维护与管理也存在相同之处。
但与其它用于物料结算的皮带秤在日常使用中过程中对精度的要求又有所不同。
1 影响拉式皮带秤精度的因素1.1影响皮带秤精度的误差包括静态误差与动态误差。
静态误差在皮带秤秤体安装时已经确定,皮带秤的安装误差。
因此在皮带秤的日常使用过程中对动态误差的控制在保证皮带秤精度上起到关键作用。
动态误差产生的原因是多方面的,根据实际使用过程中产生影响的主要因素有以下几种:物料的不均匀与冲击力造成的误差,皮带跑偏造成的误差,校准误差,环境影响带来的误差。
1.2物料的不均匀对称重传感器带来较大范围的弹性变化影响测量精度,物料的冲击对于皮带秤支架刚性的影响,皮带的振动也都影响计量的精度。
针对上述情况,要合理的调整原料仓出口闸板的高度,我厂在实际的配料过程中要求不得随意改变闸板的高度,料流稳定,高度合理,皮带秤运行速度适中。
变频调速皮带称重模糊控制配料系统

内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:变频调速皮带称重模糊控制配料系统学生姓名:郭昌学号:200540501407专业:自动化班级:自2005-4班指导教师:崔桂梅教授变频调速皮带称重模糊控制配料系统自动化05-4 郭昌指导教师崔桂梅摘要针对目前自动称重配料系统中采用传统PID控制的不足,提出了一种基于模糊-PID控制的方法。
将模糊控制技术与传统的PID控制技术结合起来,共同应用于实际系统的调节当中,误差较小时采用PID控制,误差较大时采用模糊控制,大大提高了系统抗外部干扰和适应内部参数变化的鲁棒性,有效地解决了系统运行中误差不稳定和动态特性不理想的问题。
系统采用西门子S7-200 PLC 实现模糊-PID双模控制,充分利用了PLC的控制功能,通过查表在PLC中实现了较为先进的模糊控制算法,大大加快了系统的响应速度,PLC模拟输出控制变频器调节皮带电机转速,从而达到控制物料流量的目的,很大程度地降低了劳动强度,提高了生产效率和产品质量。
经过仿真试验,系统控制性能良好。
关键词:模糊-PID控制;自动配料;电子皮带秤;变频调速AbstractAutomatic weighing ingredients for the current system used in the inadequacies of traditional PID control, a fuzzy-PID control-based approach. The fuzzy control technology with the traditional PID control technology combined with common regulation applies to the actual system, the error when using PID control of a smaller margin of error greater use of fuzzy control system greatly enhanced the anti-interference and adapt to external changes in the internal parameters robust and effective solution to a system error dynamic characteristics of instability and the problem of unsatisfactory.System uses a Siemens S7-200 PLC to achieve dual-mode fuzzy-PID control, make full use of the PLC control functions, through the look-up table in the PLC to achieve a more advanced fuzzy control algorithm, greatly speeding up the system response speed, PLC analog output inverter control motor speed regulating belt, so as to achieve the purpose of controlling the flow of materials, to a large extent reduced the labor intensity and improve production efficiency and product quality.After simulation, the system control performance good.Key words: Fuzzy - PID control; Automatic ingredient; Electronic belt scale; VVVF目录摘要 (I)Abstract (II)第一章引言 (1)1.1 设计背景及其意义 (1)1.2 目前国内外的现状及存在的问题 (2)1.2.1 电子皮带秤配料系统的现场工艺过程 (2)1.2.2 国内外常用技术解决方案 (2)1.2.3 现有控制系统存在的问题 (3)1.3 本设计的主要研究内容和解决的问题 (5)第二章自动配料系统的总体结构设计 (7)2.1 系统总体设计方案和基本组成 (7)2.2 系统工作原理及控制模型 (9)2.3 配料皮带秤的组成及原理 (10)2.3.1 配料皮带秤的组成 (10)2.3.2 配料皮带秤的工作原理 (10)2.4 称重传感器 (11)2.4.1 称重传感器的选择 (11)2.4.2 称重信号的处理 (12)2.5 测速传感器的选择 (14)2.6 电机调速方式的选择 (15)2.6.1 常用电机调速方式 (15)2.6.2 配料系统电动机的调速控制策略 (16)2.7 系统的抗干扰设计 (19)2.8 接地措施 (20)第三章电气控制系统 (21)3.1 配料过程的动力控制 (21)3.1.1 可编程控制器的选用和配置 (21)3.1.2 系统的输入输出量 (22)3.1.3 动力控制部分的设计 (24)3.2 称量落差补偿问题 (26)第四章模糊-PID复合控制系统的设计 (28)4.1 系统的控制模型 (28)4.2 控制思想与控制算法 (29)4.2.1 PID控制器 (29)4.2.2 模糊控制原理 (32)4.2.3 Fuzzy控制器的结构及算法 (34)4.2.4 模糊控制算法的PLC实现 (40)4.3变频调速皮带称重模糊控制配料系统的仿真试验 (42)4.3.1 仿真分析 (43)4.3.2 仿真试验 (43)4.3.3 结论 (46)第五章系统通信与管理软件的设计 (47)5.1 系统的通信设计 (47)5.1.1 PROFIBUS-DP概述 (47)5.1.2 PROFIBUS-DP系统的组成 (48)5.1.3 PROFIBUS-DP系统工作过程 (49)5.1.4 系统的PROFIBUS-DP通信 (52)5.2 系统组态管理软件的选择与设计 (53)5.2.1 组态软件的选择 (53)5.2.2 上位机与PLC的通信组态设计 (55)5.2.3 监控模块中变量组态 (57)5.2.4 配料系统的软件功能模块 (57)第六章总结与展望 (59)参考文献 (60)附录 (62)致谢 (80)第一章引言1.1 设计背景及其意义近年来,国内新建烧结机的配料方法均采用重量配料法,重量配料就是按原料的重量来配料,采用电子皮带秤对物料进行连续计量,通过调节圆盘给料机或皮带的速度来实现定量给料,重量配料易实现自动配料,配料精度较高。
西门子皮带秤PID控制在充填系统尾砂给定中的应用
西门子皮带秤PID控制在充填系统尾砂给定中的应用摘要:本为主要介绍了西门子电子皮带秤PID控制系统与给料变频电机在充填给料过程中的应用。
重点分析了西门子电子皮带秤BW500称重分析仪PID 调节原理、主要功能、参数设定以及与变频器控制连接的问题。
关键词:变频器;BW500称重分析仪;分级尾砂PID;皮带秤;充填某矿转产充填系统是主要用于井下采场充填的重要充填站,主要利用分级尾砂、水泥和水按照一定比例进行混合配比,在地面制成料将后通过管道输送到井下采场进行充填。
所涉及充填区域范围广,充填空场类型多,每年充填任务量大,需要消耗大量的分级尾砂。
该系统至建成投产以来,没有一种较好的方法对尾砂使用进行精确计量。
一直以来,由于该充填系统使用的分级尾砂含水高,粘性强,在使用的过程中实际给定值波动幅度大,难以进行精确控制,给安全生产带来了一定的隐患。
因此为寻求一种计量准确、可靠又能简单控制的方法,是我们一直以来工作的突破方向。
1转产充填系统工艺流程分级尾砂通过给砂电振振动到运输皮带上,再通过皮带运输到制浆搅拌桶,与水泥和水充分混合后通过充填管路输送到需要充填的采场,如图1所示。
其中,皮带以1m/s的速度运行,给砂电机采用变频器进行调速运行。
2给砂电振电机自动调节的重要性在整个的充填系统工艺流程中,水泥给定采用螺旋给料电机给定,通过变频器进行调节,在变频器频率一定的情况下,由于水泥是细粉状颗粒,在单位时间给定的重量数值N1相对稳定,误差不超过1%;水的给定采用水流量计控,单位时间内给定立方数数值N2相对稳定(N2可以等同于重量数值),误差不超过0.8%。
尾砂的单位时间内给定量假设为N3,其中含水率为a%,那么在忽略水泥含水率的情况下,充填料浆的重量浓度N大致可以用如下公式表示:N=N1+N2(1-a%)/(N1+N2+N3)通过上述公式可以看出,当尾砂单位时间给定量N2发生变化时,充填料浆重量浓度N也将发生变化,当料浆浓度N偏离过小时,将影响充填体胶结质量,留下一定的安全隐患;当料浆浓度N偏离过大时,将减缓料浆在管路中的流速,容易造成制浆搅拌桶满桶溢出和充填管路堵塞,污染环境。
电子皮带秤配料系统的模糊PID控制

概括随着科学技术的不断发展,电子皮带秤配料系统已广泛应用于煤炭、化工、烟草、冶金、建材等行业。
目前,大多数皮带秤配料系统仍采用传统的PID控制算法,具有较高的灵敏度。
可以说,调整理论上可以做到无误差,或者说在误差小的地方确实有优势,但是问题很多。
当误差较大时,其动态特性不是很理想,超调量一般较大。
因此,本课题设计了一种更为合理、高效的电子皮带秤配料系统。
本设计主要针对皮带秤配料系统中的配料环节,采用模糊PID与传统PID控制相结合的方法。
同时采用PLC控制和组态软件,实现了皮带秤配料系统中配料的自动控制。
当误差很大时,超调也很大。
本课题主要包括皮带秤的原理和组成、系统的总体设计、结合系统分析的模糊控制算法、利用MATILAB进行模糊PID控制仿真。
论文首先阐述了现有皮带秤的现状及实际过程中遇到的困难,并给出了自己的设计方案。
在保证系统称重精度和控制精度的前提下,选择合理的软硬件配置。
为了完善系统的整体设计方案和基本组成;配料带秤的工作原理及总体控制方案;称重传感器和速度传感器的选择;电机调速方式的选择等;结合配料系统的实际工作情况,通过系统分析,给出了基于模糊控制技术理论的模糊控制结构框图。
根据模糊控制器的设计步骤,设计了一种与传统PID相结合的模糊PID控制器。
解决了皮带秤配料系统的控制和误差调整问题,从而提高了配料系统的配料速度和精度。
论文分两章介绍PLC控制和MATLAB仿真。
第四章介绍了系统电气部分的组成,使运煤现场的配料系统能够根据PLC控制的要求,自动完成卸料、称重、配料的全过程。
第五章利用MATLAB仿真软件中的Simulink图形工具平台,对配料秤仪表使用的模糊PID控制进行仿真。
从仿真波形可以看出,引入模糊控制后,当系统出现扰动和偏差时,调节效果非常好。
通过该系统的研究,有效解决了电子皮带秤的控制精度和配料速度问题。
大大提高了系统的计量精度和配料速度。
在很大程度上降低了工人的劳动强度,最终提高了生产率和产品质量。
pid控制参数的模糊整定方法

pid控制参数的模糊整定方法下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!pid控制参数的模糊整定方法模糊PID控制参数整定方法通过引入模糊逻辑理论,使PID参数的整定过程更加智能化。
模糊PID技术在粮仓温度控制的应用
模糊PID技术在粮仓温度控制的应用作者:方威张腾来源:《硅谷》2014年第01期摘要自改革开放以来,我国粮食产量大幅增加,据权威部门估计,2013年我国粮食产量可能达到6亿吨,再次创造历史记录。
这样,我国每年有很多粮食要储存。
在储存过程中,为防止粮食变质、霉烂,这就对粮仓内的温度、湿度等条件提出较高的要求,而基于模糊PID技术的温度监控系统可以很好的胜任对粮仓温度进行监测的任务。
关键词模糊PID技术;粮仓;温度监测中图分类号:TP273 文献标识码:A 文章编号:1671-7597(2014)01-0010-02随着我国农业机械化水平的不断提高以及各种高产品种的农作物投入市场,我国粮食产量逐年稳定增加,在2012年,我国的粮食产量达到5亿9千多万吨,比2011年增加1800多万吨,增长率为3.2%,高居世界第一位,而且我国的粮食储量连续多年也远远高于国际安全水平。
目前我国大部分地区的粮食存储仍采用传统的方式,即在粮仓中安装的传感器是铜电阻或热敏电阻,工作人员需要逐个点进行查看,工作效率很低,实时性差,精确度也比较差,我们知道粮食是很容易长霉菌的,每年我国因粮食发霉而造成的经济损失就高达几千万,所以,建立起一套准确、快速以及能够自动监测和控制粮仓温度和湿度的系统对于提高粮仓质量、减少存储粮食的变质量是十分必要的。
1 模糊PID控制技术的原理和特点在现代各类工业生产和工程建设中,比例控制、积分控制和微分控制是应用最为广泛的调节器控制规律,这些技术总称为模糊PID控制技术,又称为PID调节技术。
在20世纪四五十年代,PID控制技术就已经问世,经过近70年的发展和改进,此技术凭借结构简单、工作稳定可靠、工作效率高以及调节方便等特点,成为各类工业生产和工程建设最主要的控制技术之一。
在现实生产中,很多被监控对象的许多重要参数不能被完全掌握,如果采用传统的控制技术时,将得不到比较精确的数学模型,不得不凭借经验或现场调试来确定,这时候传统的PID 控制技术的实用性就会大打折扣,而模糊PID控制技术非常适用于这种情况,当我们不能得到有效的系统参数时,模糊PID控制技术就会根据参数误差,利用比例、微分和几份等数学手段计算出控制量,最终将监测对象进行合理的调节控制。
基于模糊PID控制饲料配料系统的仿真研究

中国 农机化
C i e e Agiut rlMe h n zt n hn s r l a c a iai c u o
No 3 01 . ,2 2 Toa .4l t lNo2
基 于模糊 P 制饲料 配料 系统 的仿真研 究 I D控
Y N Y - h n HE Y n - iL N We. e e rho u z P D c nr nfe ac igss m 【 . hn s A r utrl e h — I u z e , ig q, I i R sac f zy I o t l d b t n t F oo e h ye J C iee g c l a M c a J i u
模 糊 控制 器 输 出为 PD 的 3个控 制 参 数 。即 K 、 I
尹 玉 珍 ,女 , 16 9 3年 生 ,江 苏 淮 安人 ,硕 士 ,江 苏 财 经 职 业 技 术 学 院机 电 系副 教 授 ;研 究 方 向 为机 械制 造 及 自动 化 。 赫英 岐 ,男 , 17 9 4年 生 ,满 族 ,辽 宁 凤城 人 ,硕 士 ,江 苏 财 经 职 业技 术 学 院机 电系 讲 师 ;研 究 方 向 为机 电一 体 化 。 林 伟 ,男 ,汉 族 ,18 9 3年 生 ,江 苏 淮 安 人 ,硕 士 ,江 苏 财 经 职 业 技 术 学 院机 电 系讲 师 ;研 究 方 向 为机 械 电 子 技 术 。
语 言 变 量 模 型 .应 用 各 类 模 糊 推 理 方 法 .得 到 适
合 控 制 要 求 的 控 制 量 . 可 以 说 模 糊 控 制 是 一 种 控 制 算 法
1 模 糊 PI 的控 制 原 理 D
一
PID控制;模糊控制;模糊PID控制器

摘要交流伺服电机现广泛应用于机械结构的驱动部件和各种数控机床。
PID控制是伺服系统中使用最多的控制模式之一。
尽管传统的PID控制系统构造简单、运转稳定,但交流伺服电机存在非线性的、强耦合。
当参数变动或非线性因素的影响发生变化时,控制不能实时改动,不能满足系统高性能、高精度的要求。
结合模糊控制和传统PID控制成一种新的控制方法--模糊PID控制是解决上述问题的一种很好的途径。
模糊控制器不需要被控对象的数学模型,而是根据之前人为设定的控制要求设计用来控制的决策算法,使用此方式确定控制量。
模糊控制和传统PID控制融合的结果,不单具有模糊控制的高性能,还具备传统PID控制精准度高的长处。
本文对PID控制算法的原理和模糊控制算法作了简要的描述和比较。
指出模糊PID混合控制法,在误差很大时使用模糊控制,在不大时使用PID控制,在MATLAB软件中,对交流伺服系统的位置控制进行了仿真。
结果表明,该控制系统仿真结果与理论上差距较小。
关键词:PID控制;模糊控制;模糊PID控制器;MATLAB第1章绪论1.1 研究课题的任务本课题的任务是了解交流伺服系统,比较并结合两种控制的优点,结合成一种新的控制方式--模糊PID控制。
该控制法在系统输出差距大时采用模糊控制,而在差距较小时采用PID控制。
文章最后给出了模糊PID位置控制的MATLAB响应图,同时给出了常规PID控制下的效果图,并比较分析。
1.3 交流伺服系统工作原理相对单一的系统,其一般是根据位置检测反馈组成闭环位置伺服系统。
其组成框图参考图1-1内容[14]。
此类系统主要原理是对比输入的目标位置信号和位置检测设备测试的真实位置信号统计其偏差且使用功率变换器的输入端弱化误差。
控制量被信号转换和功率放大驱动,驱动伺服组织,促使误差不断缩减少,一直到最佳值。
(1)位置检测装置是此类系统的关键构成方面,完整系统的动态功能是否可以满足需求,关键的是位置检测传感器的科学选择以及精度。
浅谈配料PID控制的应用及配料秤一些常见的故障(1)

浅谈配料PID控制的应用及配料秤一些常见的故障(一)先来彻底搞懂PID到底是什么东西?PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
1、这个算法是不可以吃的。
2、PID已经有107年的历史了。
3、它并不是什么很神圣的东西,大家一定都见过PID的实际应用。
比如四轴飞行器,再比如平衡小车......还有汽车的定速巡航、3D打印机上的温度控制器....就是类似于这种:需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等),PID都会派上大用场。
那么问题来了:比如,我想控制一个“热得快”,让一锅水的温度保持在50℃这么简单的任务,为啥要用到微积分的理论呢。
你一定在想:这不是so easy嘛~ 小于50度就让它加热,大于50度就断电,不就行了?几行代码用Arduino分分钟写出来。
没错~在要求不高的情况下,确实可以这么干~ But!如果换一种说法,你就知道问题出在哪里了:如果我的控制对象是一台皮带秤呢?要是希望配料秤下料量保持在150t/h,你还敢这样干么。
设想一下,假如配料系统仪表在某一时间测到下料量是140t/h。
它立刻命变频器:加速!结果,变频器那边突然来了个50Hz的频率,嗡的一下,电机急加速到了1440转/分钟,下料量到了170t/h。
这时仪表又发出命令:停、停、停,下多了!结果,变频器...............哗啦............又把频率一降到底,外面皮带停了。
所以,在大多数场合中,用“开关量”来控制一个物理量,就显得比较简单粗暴了。
有时候,是无法保持稳定的。
因为单片机、传感器不是无限快的,采集、控制需要时间。
而且,控制对象具有惯性。
模糊PID控制技术在烧结配料控制系统中的应用
Absr c : n t i p r i sfr ta l z d t e c rc eitc fm a u a trng t c i uef rbu de i g wih it rn t a t I h spa e ,ti s nay e h haa trsis o n f cu i e hn q o r n n t sn e ig i
行 计量 , 由控制 仪表 接 收称重 信号 和速度 信号 , 经处
理后 转化 为 累计 值 和瞬 时流 量 , 将 累计 值 、 并 瞬时流
l 烧 结配 料 概 述
烧 结配 料 是将 各 种 原 料按 一 定 比例进 行 给 P C模 拟 量 模 块 、 4~ L 以 2 A 0 m 模拟 电流 信 号 传 送 给 P C控 制程 序 , 过 控 L 通 制软件 中的 PD功 能 块 , 该 信 号与 设 定值 进 行 比 I 将 较运算 后 , 2 A 的模 拟 信号 送 给变 频 器 , 由 4~ 0 m 再
数 及运行 过程 可通 过 工控 机 进行 设 定 和 监控 , 可 也
通过 手动修 改 PD 功 能块 的 值 , 作 方 便 , 制 可 I 操 控 靠, 整个 系统 实 现了高 度 自动 化 , 形成 相对 独立 又相
互联 系 的闭环控 制系统 。
s 系统 的 设 定 值是 精 确 量 ; 一 系 统 的 测 齄值 是 精确 量 ; 一 F
输 入/ 出接 口、 输 被控 对象 和测量装 置等 四个部 分组 成 。其 中 , 模糊 控制 器是模糊 控制 系统 的核心 , 它一
模糊pid原理

模糊PID原理什么是PID控制器PID控制器是一种经典的反馈控制算法,被广泛应用于工业控制、自动化系统和机器人领域。
PID控制器利用被控对象的输出与期望参考值之间的偏差,通过计算比例、积分和微分三个分量的加权和来生成控制信号,从而使系统输出逐渐趋近于期望参考值。
PID控制器的三个分量分别表示了对系统当前状态的比例、积分和微分调节,即P (比例)、I(积分)和D(微分)。
比例控制项用来根据当前偏差来产生控制输出,积分控制项根据历史偏差累积来产生控制输出,微分控制项用来根据当前偏差的变化趋势来产生控制输出。
可以通过调节这三个分量的权重和参数来优化控制性能,达到使系统稳定、快速、精确响应的目的。
PID控制器的局限性PID控制器在很多应用场景中表现良好,但在某些特殊情况下,其控制性能可能会受到限制。
最主要的问题之一是PID控制器很难应对复杂的非线性、时变或不确定性系统。
此外,PID控制器对系统模型的依赖性较强,需要精确的系统模型来进行调参。
在现实世界中,很多工业过程都是非线性的,而传统的PID控制器对非线性系统的控制效果并不理想。
当被控对象存在不确定性或外部干扰时,PID控制器也容易出现较大的偏差。
因此,有必要对PID控制器进行改进以提高其控制性能。
模糊PID控制器的原理模糊PID控制器是在传统PID控制器的基础上引入了模糊控制理论的一种控制方法。
模糊控制理论是一种基于模糊集合理论的控制方法,它可以描述不确定的、模糊的和模糊规则的控制系统。
模糊控制器在传统的PID控制器中增加了一个模糊推理机制,以改善控制器对非线性、不确定性和时变系统的适应能力。
模糊PID控制器的主要原理是利用模糊规则来对系统进行控制。
首先,需要将输入和输出的模糊集合进行隶属度函数的定义,将模糊的、非精确的输入输出转化为数值。
然后,通过定义一组模糊规则,将模糊的输入映射到模糊的输出。
最后,根据模糊规则和当前输入的隶属度,计算模糊输出的隶属度,并通过一定的逻辑运算将隶属度转换为实际控制量。
模糊PID控制原理与设计步骤
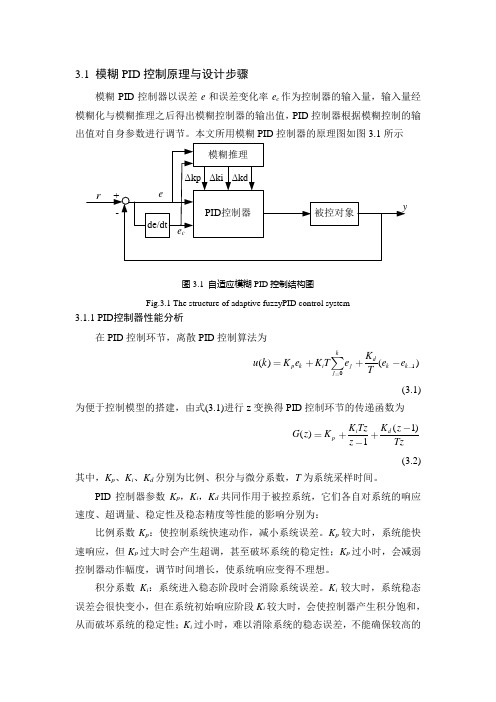
3.1 模糊PID 控制原理与设计步骤模糊PID 控制器以误差e 和误差变化率e c 作为控制器的输入量,输入量经模糊化与模糊推理之后得出模糊控制器的输出值,PID 控制器根据模糊控制的输出值对自身参数进行调节。
本文所用模糊PID 控制器的原理图如图3.1所示图3.1 自适应模糊PID 控制结构图Fig.3.1 The structure of adaptive fuzzyPID control system3.1.1 PID 控制器性能分析在PID 控制环节,离散PID 控制算法为10()()kdp k i jk k j K u k K e K Te e e T(3.1)为便于控制模型的搭建,由式(3.1)进行z 变换得PID 控制环节的传递函数为(1)()1i d pK Tz K z G z K z Tz(3.2)其中,K p 、K i 、K d 分别为比例、积分与微分系数,T 为系统采样时间。
PID 控制器参数K p ,K i ,K d 共同作用于被控系统,它们各自对系统的响应速度、超调量、稳定性及稳态精度等性能的影响分别为:比例系数K p :使控制系统快速动作,减小系统误差。
K p 较大时,系统能快速响应,但K p 过大时会产生超调,甚至破坏系统的稳定性;K p 过小时,会减弱控制器动作幅度,调节时间增长,使系统响应变得不理想。
积分系数K i :系统进入稳态阶段时会消除系统误差。
K i 较大时,系统稳态误差会很快变小,但在系统初始响应阶段K i 较大时,会使控制器产生积分饱和,从而破坏系统的稳定性;K i 过小时,难以消除系统的稳态误差,不能确保较高的调节精度。
微分系数K d:提高系统的动态响应性能,会在系统响应过程中对偏差的变化进行提前预测,从而抑制偏差的变化。
K d过大时,会使系统响应作用减弱,从而使调节时间增长,而且会降低系统的抗干扰性能。
PID控制参数的调节必须考虑不同时刻它们各自对系统性能的影响及相互之间的互联关系。
基于Matlab的配料皮带秤模糊PID控制的仿真研究

基于Matlab的配料皮带秤模糊PID控制的仿真研究一、概述随着科学技术的不断发展,自动化技术在工业生产中的应用越来越广泛。
配料皮带秤作为一种重要的物料输送设备,其精确度和稳定性对于整个生产线的质量控制具有重要意义。
传统的配料皮带秤控制系统主要采用PID控制方法,但由于环境因素的影响,如温度、湿度等,使得实际运行中的配料皮带秤系统往往难以达到理想的控制效果。
因此研究一种基于模糊控制理论的配料皮带秤控制系统具有重要的现实意义。
模糊控制是一种基于模糊逻辑理论的智能控制方法,它通过对输入变量进行模糊化处理,然后根据模糊规则进行推理和决策,从而实现对输出变量的精确控制。
模糊控制具有较强的适应性和鲁棒性,能够克服传统PID控制方法在非线性、时变等复杂环境下的局限性。
近年来越来越多的研究者将模糊控制应用于物料输送设备的控制中,取得了一定的研究成果。
本文以Matlab软件为平台,对基于模糊控制理论的配料皮带秤控制系统进行了仿真研究。
首先对配料皮带秤系统的工作原理进行了简要介绍,分析了传统PID控制方法在实际应用中的局限性。
接着介绍了模糊控制的基本原理和方法,并将其应用于配料皮带秤控制系统的设计中。
通过Matlab软件对所设计的控制系统进行了仿真实验,验证了模糊控制在配料皮带秤系统中的应用效果。
A. 研究背景和意义随着科学技术的不断发展,工业生产过程中对物料计量精度的要求越来越高。
配料皮带秤作为一种广泛应用于化工、冶金、建材等行业的物料输送设备,其测量精度对整个生产过程的稳定性和产品质量具有重要影响。
然而传统的配料皮带秤控制系统在实际应用中存在一定的局限性,如控制精度较低、响应速度较慢等问题。
为了提高配料皮带秤系统的性能,本文提出了一种基于Matlab的模糊PID控制方法,通过对皮带秤系统的建模和仿真分析,探讨了模糊PID控制在配料皮带秤系统中的应用。
模糊PID控制是一种将模糊控制与传统PID控制相结合的新型控制方法,它可以在一定程度上克服传统PID控制中的一些不足,提高系统的控制性能。
模糊PID参数自整定

模糊PID 参数自整定设被控对象为ss s s G P 1047035.87523500)(23++=采样时间为1ms ,采样模糊PID 控制进行阶跃响应,在第300个采样时间时控制加1.0的干扰,相应的响应结果如下图:Ki 的录属度函数Kp 的录属度函数e的录属度函数ec的录属度函数下面是系统在外界有干扰输入时普通PID和模糊PID参数自整定控制的阶跃响应曲线:. 从上面的仿真图可以看出,经过模糊PID参数自整定后,在外界干扰输入时,可以得到很好的控制效果。
下面是PID参数的整定曲线:.Kp的自整定调整Ki的自整定调整Kd的自整定调整程序文本:%Fuzzy Tunning PID Controlclear all;close all;a=newfis('fuzzpid');a=addvar(a,'input','e',[-3,3]); %Parameter ea=addmf(a,'input',1,'NB','zmf',[-3,-1]);a=addmf(a,'input',1,'NM','trimf',[-3,-2,0]);a=addmf(a,'input',1,'NS','trimf',[-3,-1,1]);a=addmf(a,'input',1,'Z','trimf',[-2,0,2]);a=addmf(a,'input',1,'PS','trimf',[-1,1,3]);a=addmf(a,'input',1,'PM','trimf',[0,2,3]);a=addmf(a,'input',1,'PB','smf',[1,3]);a=addvar(a,'input','ec',[-3,3]); %Parameter eca=addmf(a,'input',2,'NB','zmf',[-3,-1]);a=addmf(a,'input',2,'NM','trimf',[-3,-2,0]);a=addmf(a,'input',2,'NS','trimf',[-3,-1,1]);a=addmf(a,'input',2,'Z','trimf',[-2,0,2]);a=addmf(a,'input',2,'PS','trimf',[-1,1,3]);a=addmf(a,'input',2,'PM','trimf',[0,2,3]);a=addmf(a,'input',2,'PB','smf',[1,3]);a=addvar(a,'output','kp',[-0.3,0.3]); %Parameter kp a=addmf(a,'output',1,'NB','zmf',[-0.3,-0.1]);a=addmf(a,'output',1,'NM','trimf',[-0.3,-0.2,0]);a=addmf(a,'output',1,'NS','trimf',[-0.3,-0.1,0.1]);a=addmf(a,'output',1,'Z','trimf',[-0.2,0,0.2]);a=addmf(a,'output',1,'PS','trimf',[-0.1,0.1,0.3]);a=addmf(a,'output',1,'PM','trimf',[0,0.2,0.3]);a=addmf(a,'output',1,'PB','smf',[0.1,0.3]);a=addvar(a,'output','ki',[-0.06,0.06]); %Parameter ki a=addmf(a,'output',2,'NB','zmf',[-0.06,-0.02]);a=addmf(a,'output',2,'NM','trimf',[-0.06,-0.04,0]);a=addmf(a,'output',2,'NS','trimf',[-0.06,-0.02,0.02]);a=addmf(a,'output',2,'Z','trimf',[-0.04,0,0.04]);a=addmf(a,'output',2,'PS','trimf',[-0.02,0.02,0.06]);a=addmf(a,'output',2,'PM','trimf',[0,0.04,0.06]);a=addmf(a,'output',2,'PB','smf',[0.02,0.06]);a=addvar(a,'output','kd',[-3,3]); %Parameter kpa=addmf(a,'output',3,'NB','zmf',[-3,-1]);a=addmf(a,'output',3,'NM','trimf',[-3,-2,0]); a=addmf(a,'output',3,'NS','trimf',[-3,-1,1]); a=addmf(a,'output',3,'Z','trimf',[-2,0,2]);a=addmf(a,'output',3,'PS','trimf',[-1,1,3]); a=addmf(a,'output',3,'PM','trimf',[0,2,3]);a=addmf(a,'output',3,'PB','smf',[1,3]);rulelist=[1 1 7 1 5 1 1;1 2 7 1 3 1 1;1 3 62 1 1 1;1 4 62 1 1 1;1 5 5 3 1 1 1;1 6 4 42 1 1;1 7 4 4 5 1 1;2 1 7 1 5 1 1;2 2 7 13 1 1;2 3 6 2 1 1 1;2 4 53 2 1 1;2 5 53 2 1 1;2 6 4 43 1 1;2 734 4 1 1;3 1 6 14 1 1;3 2 6 2 3 1 1;3 3 6 3 2 1 1;3 4 5 3 2 1 1;3 54 4 3 1 1;3 6 3 5 3 1 1;3 7 3 54 1 1;4 1 6 2 4 1 1;4 2 6 2 3 1 1;4 35 3 3 1 1;4 4 4 4 3 1 1;4 5 3 5 3 1 1;4 6 2 6 3 1 1;4 7 2 6 4 1 1;5 1 5 2 4 1 1;5 2 5 3 4 1 1;5 3 4 4 4 1 1;5 4 3 5 4 1 1;5 5 3 5 4 1 1;5 6 2 6 4 1 1;5 7 2 7 4 1 1;6 1 5 47 1 1;6 2 4 4 5 1 1;6 3 3 5 5 1 1;6 4 2 5 5 1 1;6 5 2 6 5 1 1;6 6 27 5 1 1;6 7 1 7 7 1 1;7 1 4 4 7 1 1;7 2 4 4 6 1 1;7 3 2 5 6 1 1;7 4 2 6 6 1 1;7 5 2 6 5 1 1;7 6 1 7 5 1 1;7 7 1 7 7 1 1];a=addrule(a,rulelist);a=setfis(a,'DefuzzMethod','mom');writefis(a,'fuzzpid');a=readfis('fuzzpid');%PID Controllerts=0.001;sys=tf(5.235e005,[1,87.35,1.047e004,0]); dsys=c2d(sys,ts,'tustin');[num,den]=tfdata(dsys,'v');u_1=0.0;u_2=0.0;u_3=0.0;y_1=0;y_2=0;y_3=0;x=[0,0,0]';error_1=0;e_1=0.0;ec_1=0.0;kp0=0.40;kd0=1.0;ki0=0.0;for k=1:1:500time(k)=k*ts;rin(k)=1;%Using fuzzy inference to tunning PIDk_pid=evalfis([e_1,ec_1],a);kp(k)=kp0+k_pid(1);ki(k)=ki0+k_pid(2);kd(k)=kd0+k_pid(3);u(k)=kp(k)*x(1)+kd(k)*x(2)+ki(k)*x(3);if k==300 % Adding disturbance(1.0v at time 0.3s)u(k)=u(k)+1.0;endif u(k)>=10u(k)=10;endif u(k)<=-10u(k)=-10;endyout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(1)*u(k)+num(2)*u_1+num( 3)*u_2+num(4)*u_3;error(k)=rin(k)-yout(k);%Return of PID parameters%u_3=u_2;u_2=u_1;u_1=u(k);y_3=y_2;y_2=y_1;y_1=yout(k);x(1)=error(k); % Calculating Px(2)=error(k)-error_1; % Calculating Dx(3)=x(3)+error(k); % Calculating Ie_1=x(1);ec_1=x(2);error_2=error_1;error_1=error(k);endshowrule(a)figure(1);plot(time,rin,'b',time,yout,'r'); xlabel('time(s)');ylabel('rin,yout');figure(2);plot(time,error,'r');xlabel('time(s)');ylabel('error');figure(3);plot(time,u,'r');xlabel('time(s)');ylabel('u');figure(4);plot(time,kp,'r');xlabel('time(s)');ylabel('kp');figure(5);plot(time,ki,'r');xlabel('time(s)');ylabel('ki');figure(6);plot(time,kd,'r');xlabel('time(s)');ylabel('kd');figure(7);plotmf(a,'input',1);figure(8);plotmf(a,'input',2);figure(9);plotmf(a,'output',1);figure(10);plotmf(a,'output',2);figure(11);plotmf(a,'output',3);plotfis(a);fuzzy fuzzpid.fis。
模糊PID控制

Fuzzy - simulink有关模糊PID问题概述最近很多人问我关于模糊PID的问题,我就把模糊PID的问题综合了一下,希望对大家有所帮助。
一、模糊PID就是指自适应模糊PID吗?不是,通常模糊控制和PID控制结合的方式有以下几种:1、大误差范围内采用模糊控制,小误差范围内转换成PID控制的模糊PID开关切换控制。
2、PID控制与模糊控制并联而成的混合型模糊PID控制。
3、利用模糊控制器在线整定PID控制器参数的自适应模糊PID控制。
一般用1和3比较多,MATLAB自带的水箱液位控制tank采用的就是开关切换控制。
由于自适应模糊PID控制效果更加良好,而且大多数人选用自适应模糊PID控制器,所以在这里主要指自适应模糊PID控制器。
二、自适应模糊PID的概念根据PID控制器的三个参数与偏差e和偏差的变化ec之间的模糊关系,在运行时不断检测e及ec,通过事先确定的关系,利用模糊推理的方法,在线修改PID控制器的三个参数,让PID参数可自整定。
就我的理解而言,它最终还是一个PID控制器,但是因为参数可自动调整的缘故,所以也能解决不少一般的非线性问题,但是假如系统的非线性、不确定性很严重时,那模糊PID的控制效果就会不理想啦。
三、模糊PID控制规则是怎么定的?这个控制规则当然很重要,一般经验:(1)当e较大时,为使系统具有较好的跟踪性能,应取较大的Kp 与较小的Kd,同时为避免系统响应出现较大的超调,应对积分作用加以限制,通常取Ki=0。
(2)当e处于中等大小时,为使系统响应具有较小的超调,Kp应取得小些。
在这种情况下,Kd的取值对系统响应的影响较大,Ki的取值要适当。
(3)当e较小时,为使系统具有较好的稳定性能,Kp与Ki均应取得大些,同时为避免系统在设定值附近出现振荡,Kd值的选择根据|ec|值较大时,Kd取较小值,通常Kd为中等大小。
另外主要还得根据系统本身的特性和你自己的经验来整定,当然你先得弄明白PID三个参数Kp,Ki,Kd各自的作用,尤其对于你控制的这个系统。
模糊自适应PID在配料称重系统中的设计

K wor :u z n r , gr en ghig y t ey dsF z y co toln edi twei n s sems, m ua i I Si lt on
工业 配 料 控 制 过程 大致 相 同 ,一 般 通 过 称 重 传 感 器 和 速 度 传感 器测 量 出物 料 的 重量 信 号 和 速 度 信 号 ,经 计 算 后 得 到 的 物
差 的变 化 为 输 入量 时既 能 反 映 系 统 的 差 值 和 差 值 的 变 化 ,体 现 受 控 过 程 输 入 变量 的动 态 特 性 是 目前 采 用 较 广 泛 的 一 种 模 糊 控 制 器 。在 实 际 过程 控 制 中 , 维 模 糊 控 制 器 结 构 较 复 杂 、 理 时 三 推 间 长 , 求 的硬 件 设 备 精 度 和 投 资 、 护 费 用 较 高 , 要 维 因此 一 般 较 少 选 用 三 维 模 糊控 制 器 。 ( ) 糊 控制 规 则 的设计 2模 模 糊 规 则 在设 计 模 糊 控 制 器 有 着 重 要 的作 用 ,建 立 模 糊 控 制 规 则 的方 法 通 常 是经 验 归 纳 法 ,也 就 是 根 据 操 作 人 员 或 专 家 的过 程 数 据 经 验 , 结 得 出 的模 糊 控 制 语 句 。 理 的模 糊 控 制 规 总 合 则 要 保 证 对 任 意输 入都 有 相 应 的控 制 规 则 起 作 用 ,控 制 规 则 之
马 加 明 张 民 张 慧 慧 ( 青岛理工大学, 山东 青岛 2 6 3 ) 6 0 3
摘 要
在 深入 了解 配料 系统 的基 础 上 , 对传 统 配料 系统 存 在 的 配 料 精 度 不 高 、 针 系统 稳 定性 差 的 问题 进 行 创 新 和 探 索研 究 。
电子皮带秤自动配料集散控制系统结构和原理

•电子皮带秤自动配料集散控制系统结构和原理1 概述随着科学技术的日新月异,生产规模的扩大,工业生产过程自动控制程度也越来越高、手段也越来越先进,原有的生产配料装置远不能满足当前高度自动化的需要。
减轻劳动强度,保障生产的可靠性、安全性,降低生产成本,减少环境污染,提高产品的质量及经济效益是企业生产所必须面临的重大问题。
电子皮带配料系统是一种集散控制系统。
它集计算机管理技术、过程控制技术、网络通讯技术自动控制技术计量技术新传感器技术于一体的机电一体化产品;充分利用计算机技术对生产过程进行集中监视、控制管理和分散控制;充分吸收了分散式控制系统和集中控制系统的优点,采用标准化、模块化、系统化设计,配置灵活组态方便。
2自动配料系统2.1 系统结构组成(以某钢厂 7 台自动配料秤为例)电子皮带秤(自动将皮带输送机上流过的散装物料进行连续累计的一种装置)自动配料系统主要由以下几部分组成:7 台储料仓、7 台圆盘给料机、7台自动皮带输送机(内嵌电子皮带秤、7台现场操作、1 台仪表控制柜(内嵌 XK3210P型电脑积算仪和 AI 型智能调节器等)、1 台动力控制柜(内含 PLC等)、1 台低压开关柜、2 台变频器柜(内含 7 台变频器)、1 台工业控制微型计算机及组态软件。
主要参数:(1 )圆盘给料机电机型号为 YSP160Mz- 4,功率 11Kw,转速1140rpm,AC380V,50Hz。
(2 )电子配料皮带秤皮带宽度:1000mm;速度:0.5m/s;生产能力:110t/h ( 5 台),75t/h (2台)。
系统结构简图如图 1 所示。
2.2 系统工作原理2.2.1 比例调节(下料闭环控制)原理闭环控制过程主要是通过电子皮带秤对圆盘给料机输送的物料进行计量,由电脑积算仪接收称重信号和速度信号,经处理后转化为累计值和瞬时流量,并将累计、瞬时流量信号由 RS- 485口传送给工业控制机(上位机)、并以4~20mA模拟电流信号传送给 AI 调节器,AI 调节器将该信号及内部设定值进行比较运算后,输出 4 20mA的模拟信号送给变频器,再由变频器去调节圆盘给料机的转速,当流量增大时,降低圆盘给料机的转速,反之提高圆盘给料机的转速,从而使得物料的流量和阶段累计量均保持在设定的范围内,进而得到可靠的产品质量。
模糊PID控制在水稳拌和站计量中的应用
模糊PID控制在水稳拌和站计量中的应用摘要:通过对水稳拌和站计量控制系统的控制算法的分析,在传统的标准PID控制方式的基础上引入了模糊PID控制,提高了系统的动态响应特性,保证计量系统的称重精度和配比精度。
关键字:计量控制系统;相关性称量;PID控制Abstract: Through analyzing the measurement and control system control algorithm of water-stable mixing plant,introduction of fuzzy PID control based on traditional PID control is proposed,that is,applying fuzzy PID control which could improve the system dynamic response characteristics and ensure the weighing accuracy and the ratio of precision of the Weighing System.Key words: Measuring control system; Correlation weighting; PID control.1 引言随着我国公路建设事业的飞速发展,公路施工尤其是高速公路施工对稳定土厂拌设备的计量精度和生产效率要求越来越高。
目前,大多数水稳拌和站的计量控制系统采用PID控制算法,虽然PID控制算法在大多数情况下能满足控制要求,但它不能实时的在线调整它的3个参数,导致控制系统的动态性能较差,容易出现超调和震荡,且响应时间较长,造成骨料、粉料的级配误差,故需要改进控制算法。
2 水稳拌和站计量控制系统分析2.1 控制原理水稳拌和站计量控制系统中骨料电子皮带秤、粉料电子螺旋秤或者差分减量秤对物料的控制过程为:系统将物料的设定流量(期望值)与采集到实际瞬时流量(实际值)进行减法运算,得到一个偏差值,再将得到的偏差值通过控制器的控制算法进行控制运算,然后得到一个控制量,最后用这个控制量来控制出料设备的出料量(瞬时流量)的大小,从而构成一个闭环系统,以维持瞬时流量的稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要随着科学技术的不断发展,电子皮带秤配料系统已在煤炭、化工、烟草、冶金、建材等行业中广泛应用。
目前大多数皮带秤配料系统仍然是采用传统的PID 控制算法,灵敏度较高,可以说在理论上调节是能做到无误差的,或者说在误差较小的范围内的确很有优势,但是出现较大误差时,其动态特性并不是很理想,超调量一般较大。
所以,本课题设计了一套更为合理高效的电子皮带秤配料系统,本设计主要针对皮带秤配料系统中配料这一环节,采用模糊PID和传统PID控制相结合的方法。
同时用PLC控制和组态软件对皮带秤配料系统中配料这一环节实现自动控制,可以调节误差较大时,超调量也较大的问题。
本课题主要内容包括皮带秤的原理与组成,系统的总体设计,模糊控制算法结合本系统的分析以及采用MATILAB进行模糊PID控制仿真。
首先,在论文中阐述了现有皮带秤的现状及实际工艺中遇到的难点问题,给出自己的设计方案。
在保证系统称量精度及控制精度的前提下,选择合理的软硬件配置。
从而提高系统的统总体设计方案和基本组成;配料皮带秤的工作原理及总体控制方案;称重传感器和测速传感器的选择;电机调速方式的选择等;然后,在第三章中阐述模糊PID的设计。
通过系统分析结合配料系统的现场实际工作情况,由模糊控制技术的理论,给出模糊控制结构框图。
根据模糊控制器的设计步骤,设计出与传统PID相结合的模糊PID控制器。
解决了皮带秤配料系统的控制及误差调节问题,从而提高配料系统的配料速度及精度。
论文中用两章的篇幅分别介绍了PLC控制和MATLAB仿真,第四章讲述系统电气部分的组成以及PLC控制使输煤现场的配料系统按要求自动完成下料、称重、配比全过程。
第五章应用MATLAB仿真软件中的Simulink图形化工具平台对配料秤仪表采用的模糊PID控制进行了仿真。
从仿真波形图上可以看出,引入模糊控制后,在系统受到干扰出现偏差时调节效果很好。
通过该系统的研究,有效地解决了电子皮带秤的控制精度及配料速度问题。
大大提高了系统的计量精度和配料速度。
在很大程度上降低了工人劳动强度,最终提高了生产率和产品质量。
关键词:配料;模糊PID;精度;速度;配料速度;Matlab1、绪论1.1课题背景及其意义电子皮带秤是工业生产过程中对皮带传送的散装固体物料进行连续称量的计量设备,在科学技术日益发展的今天也随之日益改进,不仅要求称量准确,在冶金、煤炭、化工、烟草、水泥等行业中还要求称量过程能大幅度提高生产效率。
原料在输送中进行动态连续称量的同时还要在输送中对流量进行调节、控制,以达到准确的配比。
本设计主要针对的是皮带秤配料系统中配料这一环节,因为配料的质量如果达不到要求,一是会浪费原材料,二是影响生产的顺利进行,重则影响和生产效率,在某些重要生产岗位上,配料失误甚至会酿成事故。
可见配料精度与配料速度影响着整个生产的质量和产量,所以要对配料过程的质量和有足够的重视。
皮带秤有如下几个特点:(l)皮带秤的计量对象是连续流动的物料可以显示物料的瞬时流量和在某一段时间内的累计流量。
(2)皮带秤是在皮带运行中进行测量,所以测量的稳定性很重要。
当物料多少不等、皮带轻重不均匀和上下跳动以及皮带速度发生变化时,皮带秤应有较好的适应能力。
(3)由于传送皮带速度大多在1~2m/s左右,故皮带秤必须具有较高的响应速度。
现实中,许多皮带秤的控制精度并不很理想,易发生故障,在复杂的生产工艺中不能适应一些恶虐的环境。
所以仅仅是传统的PID控制是不能实现良好的调节效果的。
鉴于此状况,需要设计技术更为先进,更合理有效的设计方案。
本课题设计的电子皮带秤自动配料系统能有效解决动态计量衡器的控制精度问题。
可以完全替代原有的陈旧设备,应用模糊控制使得系统具有优良的性能,就配料系统而言,配料坏节采用模糊控制后,可以提高配料速度及质量,也降低了工人的劳动强度。
从更深的角度去说,是为企业创收,为国家经济发展做出贡献。
1.2系统工作现状及工艺难点问题1.2.1皮带秤配料系统的现场结构组成如图1.1所示是配料系统的结构组成图,本结构图中有4个称重单元,每个单元有料仓、给料电机、皮带秤组成。
这是一种使用最为广泛的皮带秤配料系统,也是最简单最基本的结构形式。
煤炭、化工、水泥等行业中的配料系统是要把多种原料按照一定的配比混合到一起。
本设计研究的是4种原料的混合。
系统共设有4个给料仓,每个给料仓通过各自的给料电机来控制给料速度,进而调节给料量。
电机的调速方式有多种,在第二章中分析了电机的调速方式。
物料到达皮带秤后,由皮带秤测量原料的瞬时流量以及累计流量等数据送入控制器去控制执行器。
每个料仓的下料最后到达主皮带,混合后再送入下一级。
1.2.2一般的控制方案目前各行业中使用的电子皮带秤的生产厂家也比较多,一些厂家采用的是用基于单片机的PID调节,这样的配料系统控制精度不高,可靠性也不高。
而一些大型厂家的皮带秤配料系统则是基于PID调节器和WINDOWS平台的。
系统中的传感器将测量到的信号送到称重仪表,皮带秤仪表将接收到的重量信号和速度信号经积算后以4~20mA模拟电流的形式送至PID调节器,PID调节器根据测量的瞬时流量值与设定流量值的偏差,进行比较运算后通过变频器去调整电机的转速,以达到稳定瞬时流量的目的。
如果需要改变流量或者配比时就可以直接在调节器上操作,操作起来简单方便快捷。
具体控制过程如下图。
第i号给料机的控制方框图模型如图1.2所示。
1.2.3现有配料系统的难点问题对于现有皮带秤要想使系统稳定,受到干扰时有好的调节品质,而且要求稳、准、快。
那么就需要满足以下几个条件:第一,物料出量要与给料机的控制电机转速成正比。
第二,皮带秤系统结构要稳定,由实践总结出一些共同的结构性质,对调节对象的动态特性有影响的性质有:容量系数、阻力、传递距离。
容量系数大,对象抵抗扰动的能力强,被调量在受扰动后变化慢,呈现较大惯性。
反之,容量系数小,被调量变化快,惯性小;调节对象的阻力或大或小,例如,物料在下料时会遇到仓壁或阀门等给它的阻力,所以阻力也是调节对象的一种结构性质;物料在运送过程中有一定的传送距离,从而有一定的传递时间,这也是控制的难点。
第三,PID的三个参数的设置要合理。
只有这些条件都满足,而且他们之间相互配合,才可以获得令人满意的控制效果,调节器才可以稳定快速的运行。
当然在这些条件中系统自身结构的稳定是最基本的,只有在这个前提下,才能去设置合理的PID控制参数,传统的PID控制对参数固定的系统有好的调节品质,因为它的参数整定是按照阶跃响应的过渡过程去整定的。
所以理想中可以做到无误差。
但是,实际生产中不可能做到像上述描述中的那么理想,实际电子皮带秤自动配料系统的控制精度会受到如下多个因素的影响。
首先是物料物理特性的影响,物料的粒度、湿度、温度会因为外界因素的变化而变化,这样给料设备无法正常工作供料。
比如物料在气温低或者湿度大时会出现结块的情况,从而影响给料设备的给料,应该采取一些保护措施。
保证物料不结块、结球,粒度保持一致,水分适中,流动性好。
这样才能达到控制准确度指标。
湿度的影响一般在皮带受潮最初的巧分钟之内能及时的调整零点,可以消除,当湿度变化剧烈时,此影响要引起重视。
第二是设备机械震动和设备安装的影响,皮带传输物料时机械振动会造成瞬时流量不稳定,要尽量避免机械振动对系统控制精度的影响。
安装时要尽量避免周围输送设备的振动。
给料设备的安装要严格按照要求,否则会把设备安装精度的误差转化为给料量的误差,使系统控制精度降低。
另外还有料仓形状的影响,料仓的形状有多种,要选择适合物料下放的形状及内壁材料,防止“悬料”现象的发生。
综合以上的影响,物料瞬时流量的测量误差会较大,再加上系统工作时工艺现场受其它外界的干扰,比如仪表附近的大功率变频器、电磁波的干扰、电机的频繁启停等现场情况,都使系统计量准确度和配料精度降低。
通常只是工作人员根据多年的工作经验人工给出粗略的PID参数。
使系统在一个较宽范围内控制。
还需解决的问题有:电机调速方式的选择;传感器的选择;系统抗干扰能力的提高;管理软件的设计;系统调试等问题。
1.3本设计解决的问题及主要内容本设计要解决的问题是物料在皮带传送过程中的控制精度问题,基于考虑上节提到的配料系统现存的难点及影响系统控制的诸多因素,本设一计主要在配料环节中采用模糊PID控制,即综合模糊控制技术和传统PID控制。
本设计的主要内容是结合皮带秤的现状及实际工艺中遇到的难点问题给出自己的设计方案。
在保证系统称量精度及控制精度的前提下,选择合理的软硬件配置。
从而提高系统的总体设计方案。
通过系统分析结合配料系统的现场实际工作情况,由模糊控制技术的理论,给出模糊控制结构框图。
根据模糊控制器的设计步骤,设计出与传统PID相结合的模糊PID控制器。
解决了皮带秤配料系统的控制及误差调节问题,从而提高配料系统的配料速度及精度。
最后通过仿真看出,引入模糊控制后,在系统受到干扰出现偏差时调节效果很好。
解决了原配料系统有较大的误差,动态特性不理想,超调量较大时的控制精度及配料速度问题,大大提高了系统的计量精度和配料速度。
为了保证整个控制系统的可靠性,选用研华工控机作为上位机,内装四端口串行扩展卡。
工控机与4台称重配料仪表采用RS232通讯协议。
上位机软件在Windows环境下,采用汇编语言编写,实现全汉化用户界面。
程序由生产监控、系统设置、物料设置、客户管理、任务管理和配方管理及各种统计报表等模块组成,具有界面友好、操作简便、功能强大等特点。
使整个系统实现了白动化,节省了劳动力,提高了生产效率。
本论文第二章阐述了皮带秤配料系统的总体结构设计:第三章是具体分析模糊PID控制器的设计过程;第四章是控制系统电气部分的具体实现;第五章用MATLAB软件对模糊PID控制进行仿真。
2、皮带秤配料系统工作原理及总体设计方案皮带秤配料系统中配料皮带秤作为在线测量的动态称量衡器,有着重要的作用,目前已广泛用于冶金、煤炭、烟草、化工、建材等行业中,是集输送、称量、配料于一体的设备。
皮带秤仪表除了显示瞬时流量和累积流量外,还能根据由接线盒传过来的数据与给定值的偏差来控制给料机的给料,从而保证瞬时流量的恒定。
这样就构成了一个闭环控制系统。
2.1皮带秤配料系统组成及工作原理2.1.1皮带秤配料系统组成配料皮带秤系统结构如图2.1所示,由三大部分组成,分别是料斗、给料设备和皮带秤。
图2.1中:A-称重传感器;B-测速传感器;C-称重托辊;D-接线盒;E-称重仪表。
简要介绍一下各部分的功能:1、料斗料斗主要将物料通过给料设备送至配料皮带秤。
料斗一般用普通薄钢板或镀锌薄板冲压或焊接而成。
输送磨损性强的物料时料斗的边缘常用折边,卷入钢丝和附加衬板加强,以防止快速磨损。
为了防止料斗内聚集和沉附物料,前后壁多做成圆弧连接,略带斜角。