月球探测器在转移轨道上的轨道动力学模型应包括哪些要点
月球探测中转移轨道误差分析和中途修正计算

以顺 利进 入 目标环 月轨 道 ,返 回地 球 时可 以顺 利再入 地球 大气 层 ,有 必要 对两 段转 移轨 道入 轨 时刻 的初始 误差 和转 移途 中产 生 的误差 发散 特点 进行 分析 ,并 且 针对这 些误 差 , 在地 月转 移 的过程 中进 行相 应 的轨道 中途 修 正 [ 】 . 文 章基 于月球 探测 中转 移轨道 的动 力 学特征 和误 差传 递矩 阵的性质 ,分别 对地 月转 移轨 道和 月地 转移 轨道 的误差 传递 特 点 进行 了研 究 ,根 据误 差传 递矩 阵给 出适 用于 两段 轨道估 算 第 1次 中途轨道 修 正速度 增量 的线性公 式 .并 通过 具体 算例 给 出在 实际力 学模 型 下转 移轨道 误 差传递 性 质 ,讨论 了 目
道上运 行 时误差 传递 特性 也有 许多相 似 之处 .尽管 如此 ,月地 转移 轨道 是在 固定 的环 月
轨道上 出发,探测器在再入大气层时刻满足一定再入要求的情况下返回地面上某个区域 的轨道 ,这 与地 月转 移轨道 的初 始和 终 了约束 都有 所不 同,因此两 段轨 道上 误差 传递 性 质以及 中途修正的计算结果也存在一定差异.
阵的性质,分别对地月转移轨道和月地转 移轨道 的误差传递特点进行 了研究,并根据误差 传递矩阵给出估算第 1次中途轨道修正速度增量的线性公式.通过具体算例 ,给出在实际 力学模型下月球探测 中转移轨道误差传递性质,讨论 了 目标 点和 目标轨道两种不同的轨道
修正方法的特点和适用情形,并结合再入约束条件对月地转移轨道第 2次 中途修正进行 了 分析和计算. 关键词 行星和卫星 ;探测,方法:分析 ,方法:数值 文献标识码: A
轨 道 的力学 模型 为
X =F( X, t ) =F ( X, t ) 一AF ( X, t ) .
日_地系拉格朗日点任务及其转移轨道设计方法

2009 年第1 期导弹与航天运载技术No.1 2009总第299 期MISSILE AND SPACE VEHCILE Sum No.299文章编号:1004-7182(2009)01-0007-04日-地系拉格朗日点任务及其转移轨道设计方法刘建忠(北京宇航系统工程研究所,北京,100076)摘要:绕日-地系拉格朗日点的深空探测任务越来越多,这些任务的目标轨道一般为Halo 轨道或Lissajous 轨道。
介绍了3种从地球停泊轨道出发到拉格朗日点的转移轨道设计方法,并进行了对比。
最后以A z=-800 000 km 的Halo 轨道为例,验证了直接转移轨道设计方法的有效性。
关键词:日地系统;拉格朗日点;转移轨道;Halo 轨道;Lissajous 轨道中图分类号:V412.4+1 文献标识码:AMissions of Sun-Earth Lagrange Points and Design Method of Transfer TrajectoryLiu Jianzhong(Beijing Institute of Space System Engineering, Beijing, 100076)Abstract: Missions of deep-space exploration surrounding Sun-Earth Lagrange points are increasing. Target orbits of these missions are generally the Halo orbit or the Lissajous or bit. Three methods of transfer trajectory design bet ween parking orbit and Lagrange points are introduced and compared. The Halo orbit of A z=-800 000 km is used as an example to verify the validity of direct transfer orbit design.Key Words: Sun-earth system; Lagrange points; Transfer trajectory; Halo orbit; Lissajous o rbit0 引言1772 年法国数学家J.L.拉格朗日研究发现,在一个旋转的二体引力场中存在5 个受力平衡点,这些点称作拉格朗日点(也称平动点或动平衡点)。
2025届高考物理一轮复习课件第五章第3课时专题强化:卫星变轨问题双星模型

m2 2G r2
√B.每颗星体运行的周期均为 2π
r3 3Gm
C.若 r 不变,星体质量均变为 2m,则星体的角速度变为原来的 4 倍
D.若 m 不变,星体间的距离变为 4r,则星体的线速度变为原来的14
考点二 双星或多星模型
任意两颗星体间的万有引力大小 F0=Gmr22, 每颗星体受到其他两个星体的引力的合力为 F=2F0cos 30°= 3Gmr22,A 错误; 由牛顿第二定律可得 F=m(2Tπ)2r′,
考点三 星球“瓦解”问题 黑洞
2.黑洞 黑洞是一种密度极大、引力极大的天体,以至于光都无法逃逸,科学家 一般通过观测绕黑洞运行的天体的运动规律间接研究黑洞。当天体的逃 逸速度(逃逸速度为其第一宇宙速度的 2倍)超过光速时,该天体就是黑洞。
考点三 星球“瓦解”问题 黑洞
例6 2018年2月,我国500 m口径射电望远镜(天眼)发现毫秒脉冲星
考点一 卫星的变轨和对接问题
(3)周期 卫星在Ⅰ、Ⅱ、Ⅲ轨道上的运行周期T1、T2、T3的关系为 T1<T2<T3 。 (4)机械能 在一个确定的圆(椭圆)轨道上机械能守恒 。若卫星在 Ⅰ、Ⅱ、Ⅲ轨道的机械能分别为E1、E2、E3,从轨道 Ⅰ到轨道Ⅱ和从轨道Ⅱ到轨道Ⅲ都需要点火加速, 则机械能关系为 E1<E2<E3 。
卫星的变轨和对接问题
考点一 卫星的变轨和对接问题
1.卫星发射模型
(1)为了节省能量,在赤道上顺着地球自转方向先发射卫星到圆轨道Ⅰ上, 卫星在轨道Ⅰ上做匀速圆周运动,有GMr1m2 =mvr12,如图所示。 (2)在A点(近地点)点火加速,由于速度变大,所需向心 力变大,GMr1m2 <mvrA12,卫星做离心运动进入椭圆轨道Ⅱ。 (3)在椭圆轨道 B 点(远地点),GMr2m2 >mvrB22,将做近心运 动,再次点火加速,使 GMr2m2 =mvBr′2 2,进入圆轨道Ⅲ。
未来月球及深空探测中的动力学环境问题

未来月球及深空探测中的动力学环境问题
杨艳静,樊世超,张俊刚,杨 江,张文兵,王辰星
(北京卫星环境工程研究所,北京 100094)
摘要:近年来,越来越多的空间机构将月球和深空探测作为未来空间探测的重点。未来随着深空探 测任务复杂度的增加,其面临的动力学环境也更加复杂。文章分析了月球和深空探测过程中所面临的动 力学问题,介绍了现有月球和深空探测中主要动力学环境试验的情况,最后提出了未来月球和深空探测 所面临的动力学环境模拟挑战和建议。
Abstract: The lunar and deep space explorations have become a focus according to the plans of many space organizations. As the complexity of the mission increases, the induced dynamic environment becomes more severe. The dynamic environment during lunar and deep space explorations is analyzed in this paper, with an introduction of the related dynamic tests performed on ground. Finally, the challenges of the dynamic environmental modeling in the future lunar and deep space explorations are highlighted and some suggestions are made.
3)未来长期载人任务给人机工程匹配、人工重 力环境营造等提出了新的要求。
月球软着陆飞行动力学和制导控制建模与仿真
⎧tan−1 (Y X ),
X > 0,Y > 0,
αL
=
⎪⎪ ⎨
tan
−1
(Y
X ) + π,
X < 0,
⎪ ⎪⎩
tan
−1
(Y
X ) + 2π,
X > 0,Y < 0,
βL = cos−1 (Z r).
(7)
由(7)式即可求得赤经和赤纬的变化量: ΔαL = αLf −αL0, ΔβL=βLfБайду номын сангаас−βL0. 于是, 由下式即得软着陆初始下 降点的经纬度λL0 和ϕL0, 如下
收稿日期: 2008-08-01; 接受日期: 2008-11-01
摘要 着重对月球软着陆制动段、接近段和着陆段的飞行动力学模型进行了研究, 同时基 于动力学模型对各阶段制导律进行了优化设计. 制动段飞行时间和距离较长, 拟采用均匀球 体模型, 该模型也是软着陆全过程下降轨迹分析和动力学仿真的基础; 制导律设计中考虑到 该段燃料消耗很大, 主要以燃料最优为设计指标. 接近段距离月面较近, 且经姿态调整后接 近垂直下降, 拟采用平面月球模型; 制导律设计采用基于重力转弯技术的最优开关制导律. 着陆段几乎垂直下降, 动力学模型可在平面月球模型的基础上简化为一维垂直下降模型, 制 导律设计拟在垂直方向采用简单的程序制导方式. 最后, 在考虑测量、推力误差以及环境干 扰等影响下对着陆精度进行了初步仿真分析, 结果表明, 给出的软着陆三阶段动力学模型和 制导律是可行的.
首先需要获得软着陆过程赤经赤纬的变化. 这 里需要利用软着陆下降轨迹设计的一个结论: 软着 陆下降轨迹平面在环月停泊轨道平面内.
2024年高考物理一轮复习(全国版) 第5章 专题强化7 卫星变轨问题 双星模型
例7 (多选)如图所示,质量相等的三颗星体组成三星系统,其他星体对
它们的引力作用可忽略.设每颗星体的质量均为m,三颗星体分别位于边
长为r的等边三角形的三个顶点上,它们绕某一共同的圆心O在三角形所
在的平面内以相同的角速度做匀速圆周运动.已知引力常量为G,下列说
法正确的是
A.每颗星体所需向心力大小为
m2 2G r2
1.双星模型
(1)定义:绕公共圆心转动的两个星体组成的系统,我们
称之为双星系统.如图所示.
(2)特点
①
各
自
所需的
向
心
力
由
彼此间
的
万
有
引力提
供
,
即
Gm1m2 L2
=
m1ω12r1
,
GmL12m2=m2ω22r2.
②两星的周期、角速度相同,即T1=T2,ω1=ω2.
③两星的轨道半径与它们之间的距离关系为r1+r2=L.
例4 北京时间2021年10月16日神舟十三号载人飞船与在轨飞行的天和核心舱 顺利实现径向自主交会对接,整个交会对接过程历时约6.5小时.为实现神舟十 三号载人飞船与空间站顺利对接,飞船安装有几十台微动力发动机,负责精 确地控制它的各种转动和平动.对接前飞船要先到达和空间站很近的相对静止 的某个停泊位置(距空间站200 m).为到达这个位置,飞船由惯性飞行状态转入 发动机调控状态,下列说法正确的是 A.飞船先到空间站同一圆周轨道上同方向运动,合适位置减速靠近即可 B.飞船先到与空间站圆周轨道垂直的同半径轨道上运动,合适位置减速靠近即可 C.飞船到空间站轨道下方圆周轨道上同方向运动,合适的位置减速即可
①G2Rm22+GRM2m=ma 向 ②GLm2 2×cos 30°×2=ma 向
深空探测中的轨道分析、设计与控制

深空探测中的轨道分析、设计与控制一、本文概述深空探测是人类探索宇宙未知领域的重要手段,涉及多个关键领域,包括航天工程、天文学、物理学、数学等。
其中,轨道分析、设计与控制作为深空探测任务中的核心环节,对任务的成功与否起着至关重要的作用。
本文将对深空探测中的轨道分析、设计与控制进行深入研究,旨在提高我国深空探测任务的精准度和成功率,为未来的深空探测活动提供坚实的理论基础和实践指导。
本文将首先概述深空探测的背景和意义,阐述轨道分析、设计与控制在深空探测中的重要性。
随后,将详细介绍轨道分析的基本原理和方法,包括轨道动力学模型、轨道确定与预报等。
在此基础上,文章将探讨轨道设计的基本原则和优化方法,分析不同轨道类型在深空探测任务中的应用场景和优缺点。
本文还将深入讨论轨道控制的关键技术,如推力控制、轨道机动、轨道修正等,并分析这些技术在深空探测任务中的实际应用。
本文将对深空探测中的轨道分析、设计与控制进行总结,展望未来的发展趋势和研究方向。
通过本文的研究,将为我国深空探测任务的顺利开展提供有力的技术支撑和理论保障,推动我国深空探测事业的快速发展。
二、深空探测轨道基础深空探测轨道设计是深空探测任务中至关重要的一环,它涉及到如何最有效地将探测器从地球发送到目标天体,并在完成任务后将其安全带回地球。
在进行深空探测轨道设计时,需要考虑到多种因素,包括目标天体的位置、轨道动力学、能源限制、通信延迟等。
深空探测轨道通常可以分为发射轨道、转移轨道、接近轨道和返回轨道等几个阶段。
发射轨道是指探测器从地球表面发射后,进入地球引力场外的轨道。
转移轨道是指探测器从地球出发,经过一段时间的飞行,到达目标天体的轨道。
接近轨道是指探测器接近目标天体,进入其引力场,并准备进行科学实验或探测任务的轨道。
返回轨道则是指完成探测任务后,探测器从目标天体出发,返回地球的轨道。
在深空探测轨道设计中,需要特别关注轨道动力学的问题。
轨道动力学是研究物体在引力场中的运动规律的学科,对于深空探测轨道设计来说,它涉及到如何根据目标天体的引力场和探测器的动力学特性,计算出最佳的轨道轨迹。
航空航天工程师的航天器轨道动力学

航空航天工程师的航天器轨道动力学航天工程是现代科技领域中最为复杂和挑战性的领域之一。
而在航天工程中,轨道动力学是十分重要的学科之一。
作为航空航天工程师,了解航天器的轨道动力学是必不可少的。
本文将探讨航天器轨道动力学的基本概念和应用。
一、轨道动力学的基本概念航天器的轨道动力学是研究航天器在空间中运动的学科。
它涉及到航天器的运行状态、运行路径以及运动参数等方面的理论与计算。
在轨道动力学中,常用的概念有轨道、轨道高度、轨道倾角等。
1.1 轨道轨道是航天器绕行星体(如地球)运行的路径。
根据轨道的形状和特性,轨道可以分为圆轨道、椭圆轨道、偏心轨道等。
通过设定不同的轨道,航天器可以实现不同的任务目标,如通信卫星通过地球同步轨道可以实现全球通信覆盖。
1.2 轨道高度轨道高度是指航天器距离地球表面的垂直距离。
通常以海平面为基准点,可以分为低地球轨道、中地球轨道、高地球轨道等。
轨道高度的选择与航天器的任务和设计要求密切相关,不同的高度对应着不同的应用场景。
1.3 轨道倾角轨道倾角是指轨道平面与地球赤道面之间的夹角。
轨道倾角的大小直接影响着航天器与地球的相对位置和轨道运动形式。
通常情况下,轨道倾角为0°的轨道被称为赤道轨道,而倾角较大的轨道则会呈现出椭圆形的轨道运动。
二、航天器轨道动力学的应用轨道动力学对于航天器的设计、运行和任务实施都有着重要的指导意义。
航天工程师在进行航天器设计和任务规划时需要充分考虑轨道动力学的相关因素。
2.1 轨道设计与控制航天工程师需要根据不同任务的需求,合理选择适当的轨道参数,确保航天器能够按照预定轨道进行运行。
同时,在航天器运行过程中,轨道控制也是一个关键问题。
通过调整姿态、推进系统等手段,航天工程师可以实现对航天器轨道的精确控制和调整。
2.2 轨道机动与转移航天器在任务实施过程中,可能需要进行轨道机动和转移,以满足不同的任务需求。
轨道机动是指改变航天器轨道的运动,包括姿态调整、轨道升降、轨道平面变换等。
航天器轨道动力学与控制上-马佳

监测数据
●高度 卫星必须在地平线以上 ●天光 光学测量设备或人眼观测时,天空必须足够黑 ●地影 不发光的卫星还需太阳光直接照射
07
地月飞行和星际飞行
地月关系
地月系的三个运动:
●地球自转 ●地球和月球围绕公共质心 的运动 ●月球的自转
月球公转参数:
●椭圆轨道,偏心率0.0549 ●轨道面与地球赤道的夹角 18.2°—28.8° ●黄白道夹角5°9′
加权最小
广义卡尔 曼滤波
二乘法
观测数据集中处理的“批量计 算方法”。
按时间顺序对每个观测数据进 行解算的“序贯计算法”。
卫星的观测预报
概况预报
利用已有的资料,通过解算卫星运动方程,确定卫星可见段的 起止时间和最大高度。
准确预报
确定确定卫星每一时刻的高度角、方位角和卫星到激光测距仪 的距离,以便可以快速、准确的跟踪卫星。
轨道摄动
04
轨道转移
轨道转移概述
轨道转移是指航天飞行棋 在其控制系统作用下,由 沿初始轨道(或停泊轨道)
运动改变为沿目标轨道运
动的一种轨道机动。 转移轨道又称过渡轨道, 是航天器从初始轨道或停
泊轨道过渡到工作轨道的
中间轨道。
共面圆轨道发轨道转移
双脉冲变轨可以使新的轨道完 全脱离原有的轨道。 在两个共面圆轨道之间的最佳 变轨方式为霍曼变轨,其转移
卫星星食
卫星进入地球阴影的现象叫做卫星 食,在卫星食发生时,卫星上的光 电池不能供电,整形温度下降,以 太阳光为信号的敏感器失去作用。 对于静止轨道而言,卫星的星食发 生在春秋分前后各23天的午夜,每 次发生星食的时间不定,最长 72min。
返回轨道概述
返回轨道设计要求
地势平坦,交通便捷 远离城市,通信顺畅 远离高压重要设施 选择已有回收区 利用已有测控网络
(完整版)高中物理双星问题和卫星变轨考点归纳
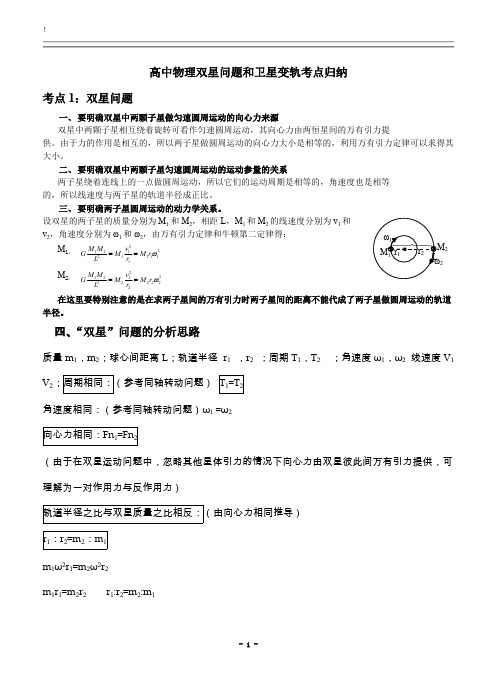
高中物理双星问题和卫星变轨考点归纳考点1:双星问题一、要明确双星中两颗子星做匀速圆周运动的向心力来源双星中两颗子星相互绕着旋转可看作匀速圆周运动,其向心力由两恒星间的万有引力提供。
由于力的作用是相互的,所以两子星做圆周运动的向心力大小是相等的,利用万有引力定律可以求得其大小。
二、要明确双星中两颗子星匀速圆周运动的运动参量的关系两子星绕着连线上的一点做圆周运动,所以它们的运动周期是相等的,角速度也是相等的,所以线速度与两子星的轨道半径成正比。
三、要明确两子星圆周运动的动力学关系。
设双星的两子星的质量分别为M 1和M 2,相距L ,M 1和M 2的线速度分别为v 1和v 2,角速度分别为ω1和ω2,由万有引力定律和牛顿第二定律得:M 1: 22121111121M M v G M M r L r ω==M 2: 22122222222M M v G M M r Lr ω==在这里要特别注意的是在求两子星间的万有引力时两子星间的距离不能代成了两子星做圆周运动的轨道半径。
四、“双星”问题的分析思路质量m 1,m 2;球心间距离L ;轨道半径 r 1 ,r 2 ;周期T 1,T 2 ;角速度ω1,ω2 线速度V 1 V 2;周期相同:(参考同轴转动问题) T 1=T 2角速度相同:(参考同轴转动问题)ω1 =ω2向心力相同:Fn 1=Fn 2(由于在双星运动问题中,忽略其他星体引力的情况下向心力由双星彼此间万有引力提供,可理解为一对作用力与反作用力)轨道半径之比与双星质量之比相反:(由向心力相同推导)r 1:r 2=m 2:m 1m 1ω2r 1=m 2ω2r 2m 1r 1=m 2r 2r 1:r 2=m 2:m 122线速度之比与质量比相反:(由半径之比推导)V 1:V 2=m 2:m 1 V 1=ωr 1 V 2=ωr 2V 1:V 2=r 1:r 2=m 2:m 1两颗质量可以相比的恒星相互绕着旋转的现象,叫双星。
航天器轨道设计的动力学模型建立

航天器轨道设计的动力学模型建立航天器轨道设计是航天工程中至关重要的一环。
通过合理的轨道设计,可以实现航天器的稳定运行、精确控制和高效利用。
而建立航天器轨道设计的动力学模型,则是实现这一目标的基础。
一、轨道设计的重要性航天器轨道设计的重要性不言而喻。
合理的轨道设计能够确保航天器在太空中的稳定运行,避免与其他航天器的碰撞,提高任务的成功率。
此外,轨道设计还能够影响航天器的能源利用效率,通过合理的轨道选择,航天器可以更好地利用地球引力和其他天体的引力,实现能源的节约和再利用。
二、动力学模型的基本原理建立航天器轨道设计的动力学模型,需要考虑多种因素,包括引力、惯性、空气阻力等。
其中,引力是最主要的因素之一。
根据牛顿力学定律,航天器在太空中受到太阳和其他天体的引力作用,这些引力将决定航天器的运动轨迹。
同时,航天器自身的质量和速度也会对轨道设计产生影响。
三、动力学模型的建立方法建立航天器轨道设计的动力学模型可以通过多种方法实现。
其中,最常用的方法是数值模拟法和解析法。
数值模拟法是一种基于计算机仿真的方法。
通过将航天器的运动方程转化为数值计算问题,可以得到航天器在不同时间点上的位置和速度。
这种方法的优势在于可以考虑多种复杂因素,并且可以得到非常精确的结果。
但是,数值模拟法需要大量的计算资源和时间,对计算机的性能要求较高。
解析法是一种基于数学公式的方法。
通过对航天器的运动方程进行求解,可以得到航天器的轨道方程。
这种方法的优势在于计算速度快,计算结果准确。
但是,解析法通常只适用于简单的轨道设计问题,对于复杂的情况,可能无法得到解析解。
四、动力学模型的应用案例航天器轨道设计的动力学模型在实际工程中有着广泛的应用。
例如,国际空间站的轨道设计就是通过建立动力学模型来实现的。
通过考虑地球引力、太阳引力和其他天体的引力等因素,科学家们成功地将国际空间站安置在了一个稳定的轨道上,确保了航天员的安全和任务的顺利进行。
此外,动力学模型还可以应用于卫星轨道设计、行星探测器的轨道设计等领域。
轨道动力学分析分解课件

它涉及到经典力学、相对论力学 以及天体力学的相关知识,为航 天器轨道设计、行星探测和宇宙 航行等提供重要的理论支持。
轨道动力学的研究目的
揭示天体运动的规律和机制, 理解轨道参数变化对运动特性 的影响。
为航天器轨道规划和姿态控制 提供理论依据,提高航天器的 运行效率和安全性。
探索未知天体和宇宙现象,推 动天文学和宇宙科学的发展。
动量守恒定律
总结词
描述系统动量的变化规律,系统不受外力或合外力为零时,系统的动量保持不 变。
详细描述
动量守恒定律是物理学中的一个基本定律,它指出如果一个系统不受外力或合 外力为零,则系统的动量保持不变。在轨道动力学中,这个定律用于描述天体 的运动规律,特别是行星、卫星等天体的轨道运动。
角动量守恒定律
描述轨道力学中物体运动规律的方程式,包括轨道方程、速度方程和加速度方程等。
详细描述
轨道力学的基本方程是描述天体运动规律的数学表达式。这些方程包括轨道方程、速度方程和加速度方程等,它 们可以用来计算天体的位置、速度和加速度等运动参数。这些方程基于牛顿的万有引力定律和运动定律,是轨道 力学分析的基础。
03
有限元法的局限性
有限元法的计算量较大,需要消耗较多的计算资源和时间。此外,有限元法的精度受到离散化的影响, 对于某些特殊问题可能需要特殊的处理和建模技巧。
04
CATALOGUE
轨道动力学在工程中的应用
铁路轨道设计
总结词
轨道动力学在铁路轨道设计中发挥着 关键作用,确保列车安全、稳定地运 行。
详细描述
CATALOGUE
轨道动力学分析方法
解析法
01
解析法定义
解析法是一种通过数学公式和定理来求解轨道动力学问题的方法。它基
嫦娥三号软着陆轨道优化模型

嫦娥三号软着陆轨道优化模型摘要本文针对嫦娥三号软着陆轨道最优设计问题,确定了近、远月点的位置与速度,建立了嫦娥三号六个阶段的最优轨道控制模型,提出了相应的最优控制策略,最后做出了误差分析和敏感性分析。
针对问题一,本文建立空间直角坐标系,在着陆准备轨道平面内建立动力学二阶常微分方程模型,利用微元法的思想,求得近月点的经纬度为(19.51°W,31.29°N),远月点的经纬度为(160.49°E,31.29°S)。
利用开普勒第二定律,得出嫦娥三号在近月点和远月点的速度大小分别为1692.2m/s,1614.4m/s,速度方向与椭圆切线方向相同。
针对问题二,分别确定了嫦娥三号软着陆六个阶段轨道的最优控制策略。
对于着陆准备轨道,根据燃耗量最小的原则,借鉴霍曼转移模型,得出嫦娥三号在此阶段的轨道是月心为焦点,长半轴为1794.5km,短半轴为1794km的椭圆。
对于主减速阶段,根据动力学原理,建立轨迹优化模型,用改进的遗传算法求解,得到该阶段最低燃耗量为1060.71kg,轨道形状为类抛物线。
对于快速调整阶段,将水平偏移量作为优化目标,建立微分方程模型,得到最小的水平偏移量276.3米。
利用附件中的数字高程图,分析得到各点的海拔。
在粗避障阶段,提出崎岖度的概念,建立基于崎岖度最小的水平轨道优化模型和基于燃耗量最小的垂直轨道优化模型,得到嫦娥三号在此阶段的水平位移为234.31米,最小燃耗量为69.38千克。
对于精避障阶段,建立基于月面坡度最小、着陆器燃耗量最小的轨道优化模型,解出嫦娥三号水平总位移为5米,最小燃耗量为14.29千克。
在缓速下降和自由落体阶段,利用动力学公式求解出运动时间为13秒。
针对问题三,通过对着陆点和其它各关键点的位置进行误差分析,发现本文确定的着陆点与实际着陆点相差80千米,纬度相差2.14°,偏差可以接受。
最后依据主发动机作用力与运动反方向的夹角的变化对主减速阶段和快速转移阶段进行了敏感性分析。
深空探测器的自主天文导航原理与方法

School of Geodesy and Geomatics
34/103
4.1.2天文导航对深空探测的重要性 深空探测器的轨道分类
1)直接转移轨道
School of Geodesy and Geomatics
35/103
4.1.2天文导航对深空探测的重要性 深空探测器的轨道分类
2).调相转移轨道
天文与深空导航学
主讲:魏二虎 教授
School of Geodesy and Geomatics
1/103
目录
第一章 第二章 第三章 第四章 第五章 第六章 第七章
第八章
天文与深空导航的理论基础 天文导航的天体敏感器 低轨地球卫星自主天文导航基本原理 深空探测器的自主天文导航原理与方法 VLBI技术用于深空探测器导航的原理与方法 USB技术用于深空探测器导航的原理与方法 脉冲星测量技术用于深空探测器自主导航的原 理与方法 其他导航技术在深空探测中应用与国内外深空 探测计划
4/103
4.1.1深空探测的发展
School of Geodesy and Geomatics
5/103
4.1.1深空探测的发展
1).先驱者号探测外行星 • 先驱者号探测器是美国发射
的行星和行星际探测器系列 之一。 • 1958 年 10 月 到 1978 年 8 月 之 间共发射了13颗,用来探测 地球、月球、金星、木星、 土星等行星及其行星际空间。 • 其中最为引人注目的是先驱 者10号和先驱者11号。
School of Geodesy and Geomatics
26/103
4.1 引 言
4.1.1 深空探测的发展
4.1.2
天文导航对深空探测的重要性
地月转移轨道特征及快速设计方法

到 十几 个 月 , 目前 仅有 欧空 局 “ MA T一1 月 S R ”
球探 测器 实现 这种转 移方 式 。 本文 仅对 第一种 度 为 村 。,则 探 测 器 相 对 月 球 的 速 度 为
V' = V 一
m
;此 相 对 速 度 可 以看 成 探 测 器 在
月球 影 响 球 边 界 处 相 对 月 心 的 速 度 ,也 可 以 看 成 探 测 器 相 对 月 心 在 无 穷 处 的 速 度
的
() 3
上式 中 ,
、
分 别 为 地球 和 月球 的非球
21 年 1 01 2月
深 空探 测 研 究
.3 一
图 1 地 月转移轨道和月球影响球
/ vn/ /
\
、\/ f / /
\
.
,
/
图 2 近月双曲轨道示意图
2 3 双 二体 简化 模型 下的 地月转 移轨 道特 征 .
J0 0惯 性 坐标 ;在 此 惯 性 系 下 ,月 球 探 测 器 的 20
见图 l 。在 转移 时 间相 同条 件 下 ,对 于 不 同轨 道 倾角 的 地 月 转 移 轨 道 ,其 到 达 月 球 ( 球 影 响 月 球 ) 时 的 速 度 大 小 是 相 同 的 ,但 是 速 度 方 向 不
同 ,从而 造成 相对 月 球 的速 度 不 同 ,而 大小 和方 向都
摘
要 :本文针对地月 直接转移轨道进行分析 。首先提 出双二体简化模 型 ,在 此模型下直接 给 出地月转移 轨道的一些
月球探测技术_轨道设计和计算_林胜勇

方法可近似确定探测器在月球降落的入轨条件、近
月点高度和绕月飞行的方位, 非常适合于估算飞向 月球所需的特征速度。但若需进一步了解并预测精 确到达月球的条件, 就必须考虑更多的摄动影响。
2. 2 圆形限制性三体模型 探测器在地月空间运动, 只考虑地球中心引力
和月球中心引力的作用, 忽略其他摄动的影响。由
上海航天
58
A ERO SPA CE SHAN GHA I
2003 年第 4 期
星的引力) ; ( g) 太阳辐射压力; ( h) 电磁力与太阳等 离子体流的作用力; ( i) 地球固体潮摄动力与海潮摄 动力; ( j) 相对论 一体摄动 力; ( k) 地球 其他摄动 力 ( 包括自转附加摄动力、扁率间接摄动力和反照辐射 亚摄动力) 。
a3e/ Le( E 1- e esin E 1) 。 2. 1. 3 边界点参数转换
将边界点处相对地心的位置和速度换算为相对
2003 年第 4 期
林胜勇, 等: 月球探测技术 ) ) ) 轨道设计和计算
59
于月心的位置和速度。边界点月心矢径 r2 和对月 速度 v2 分别为: r2= r1- rem, v2= v1- vm ( 此处, r1 为边界点地心矢径; v1 为探测器在边界点处对地速 度) , 并有 r 2= Q。 2. 1. 4 轨道月心段计算公式
地月系是一个特殊的系统计算在此系统中飞行的月球探测器的精确轨道通常需要考虑地球月球太阳行星和大气等所产生的各种力的作用并且由于月球运动的复杂性实际飞行任务还必须依赖星历表
上海航天
2003 年第 4 期
A ERO SPA CE SHAN GHA I
57
文章编号: 1006-1630( 2003) 04-0057- 06
月球探测器返回轨道特性分析

( 国防科技大学 航天与材料工程学 院, 湖南 长沙 摘 40 7 ) 1)3
要 : 月球 探测器的返 回轨道进行 了建模与特性分 析。在三维 空间 中建立 了返回轨道 的数学模 型 ; 对
对模型进行仿真分析 得到从月球影 响球 东经 8 ̄ 口的返 回轨道 最省能量等结论 ; 0 根据模型及其特 性给出初 步轨道 的算例 , 以此结 果为初值 , 已有高精度 动力 学模型下搜 索计算 , 并 在 较快地得 到了精确轨 道 ; 通过 两条 轨道参数及空间形状 的对 比, 证明文 中解析方法 的正确性 。
Ke od : nrp b ;runt j t y hr t ii aa s ; r i nr a c r; r i a c r yw rsl a r e e r a c r;caa e sc nl i pemi yr ety pe s t j ty u o t re o c rt y s l a tj o c e re o
关键词 : 月球探 测器 ; 回轨道 ; 返 特性分析 ; 步轨 道 ; 初 精确轨道 中图分类号 :424 V 1 .1 文献标识码 : A
C a a tr t so t r rjcoy o u a r b h rcei i f sc Reu n T aetr f n rP o e L
xz如 图 1 y, 所示 。其 中 0 为月心 ,y平 面为某 瞬 时 t( 文 中取 为 出 口点时 刻 t) 白道 面 , 轴 由 t x 。本 的 。
时刻的月心指向地心 , 轴为该时刻月球绕地球公转动量矩方 向, 轴 与二者构成右手 系。在研究 中, z Y 选 0 一x 作为惯性坐标系 , y z 使用的月心经纬度也定义在月心白道坐标系中, 北纬为正 , 南纬为负 , 东经
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 月球探测器在转移轨道上的轨道动力学模型应包括哪些要点,其表达式一般 在哪个坐
标系下,如何获取某一时刻的月球、太阳坐标?
该力学模型包括:
① 地球中心引力,月球中心引力;
② 地球形状摄动,月球形状摄动;
③ 大气阻力;
④ 太阳引力摄动,太阳辐射压摄动。
其表达式一般在地心黄道坐标系
月球和太阳坐标为已知的时间函数,可以由星历表求得。
2. 根据图五所示,推导VLBI 精密单点定位观测方程(△ S 的表达式)设在某选
定的坐标系中的时刻t 0某波从波源S 出发,分别在时刻t 1,t 2被测站Q ,O 2接
收,对应的测站至月球探测器(波源)矢量分别为S i , S 2。
设E 为时刻t o 地心
位置,此时测站的地心矢量分别为 R, R 2,&为地心至月球探测器矢量。
则
=
(t 2 一 J ) • 2「1 八 t 其申,△是 s 2和q 的时间差。
几何时延直接和探测 器的站心坐标矢量建立几何关系。
△是由多种原因引起的附加时延总和。
如果能用一定的物理模型计算出附加时延差的采用值 则可以由式 △t ,并建立如下方程:c.C :s=S 2(t 2)-S i (t i )
S l (t i ) =[(X e (t o ) -X i )2 (y e (t o ) - %)2 (Z e (t o ) -乙)2]'2
2 2 2 1
S 2(t 2)=[(X e (t o ) — X 2) ©e(t o ) - 丫2 亿仏)「Z ?) ] 2
给出几何时延的观测值 两站心坐标矢量的模为: 几何时延,就是假定在真空情况下,光线经过光程
于是
S 二[(X e(t o) —X) (y e(t o) —yj2 (Z e(t o)—乙)2]'2
」(X e(t o)川2)2队壮0)-丫2)2(Z°(t。
)_ 汀]'
式即是VLBI用于探测器观测的基本几何关系式。
方程左端是经过附加时延改正后的几何光程差的观测值,右端是探测器在光子发射时刻的地心赤道坐标以及两台站在接收时刻的地心赤道坐标的函数。
台站坐标已知,探测器坐标是待定值。
假定在n条基线上,同时观测到探测器在时刻发出的光子,每条基线都可给出形
如下式的观测方程。
• :S =[(X e(t o) -X i)2(y e(t o) -y i)2(Z e(t o) -Z1)2] 2
4(x e(t0 ) - X2)* (y e (t0 ) - y2),(Z e(t0 ) - Z2)]'
如果有三条以上基线同时观测得到的独立的误差方程,即可解出探测器的位置坐标,这就是地面VLBI单点定位的基本原理。
3■试根据图6简述狭缝式太阳敏感器的原理,写出太阳光线与自旋轴之间夹角的表达式
狭缝1位于探测器的某一子午面内,狭缝2位于与子午面成i角的一个倾斜平面内,为了信号处理方便,将此倾斜平面绕自转轴反转过角©。
(称为预置角)
4.简要论述月球探测器信息融合滤波的必要性和优点
这种基于信息融合滤波的自主导航新方法,可以获得较高的定位精度,提供准确
的位置、速度信息。
信息分配因子与子系统的误差矩阵相结合的方法可以大大提高组合系统的可靠性。
5.论述脉冲时间转换和比对过程设t为测站观测到的TOA值,脉冲星脉冲到达太阳系质心的时间为t b,t b为太阳系质心力学时,则我们可利用下式将t转换到太阳系质心,有:利用上式将脉冲到达时间TOA转换到太阳系质心后,脉冲星在t (太阳系质心力学时TDB)时刻的自转相位,即相对于太阳系质心的相位可表示为
M
(t)二(T o) f (t -T o)、
m d
f(m)(t T o)m v
(m 1)!
利用上述两式,对测站的计时观测得到的TOA 资料进行拟
合,最终得到脉冲星的 自转参数和天体测量参数,一般拟
合时间跨度为 2〜3年。
由这些精确确定的参 数,我们利
用上式即可建立该脉冲星的自转模型,即 脉冲星时钟模
型。
t h
由脉冲星时钟模型可以获得脉冲信号到达 SSB 的时间为h 其中,arg 是取幅角函数;从而可以利用脉冲星时钟模型准确预报脉冲星脉冲到 达太阳系质心SSB 处的时间。
6. 试写出Ss 和S1的表达式以及二者之间的关系
图中,Os-XsYsZs 为太阳敏感器坐标系,其中 Os 是小孔所在位置,Oc-XcYcZc 为像平面坐标系,(X,y )为像点坐标(光斑中心),(a s, S s )为太阳的方位角和
tan =
仰角,d 为小孔距离敏感面的垂直高度。
从而J d
sin s sin s
cos : s Sin . IL cos s
已知太阳在天球坐标系O-XYZ 下的赤经a 和赤纬S ,则太阳在惯性坐标系下的
- c osa cos 6
1 S| = sin a cos§
单位矢量SI 可以表示为:
sin 6 一
S 和S 的关系为
I S S =AsAbA(S
S I
式中:
As ——太阳敏感器在探测器本体坐标系中的安装矩阵;
Ab ——探测器本体坐标系在轨道坐标系中的姿态矩阵;
Ao 探测器轨道坐标系到惯性坐标系的转移矩阵,可根据轨道参数获得
7. 简要论述信息融合滤波方法的优点
由上式可以推出太阳在敏感器坐标系中的矢量 Ss 。
为 S s
进行信息融合得到的组合导航系统可以优势互补、精度较高、可靠性较强
8.简述航天器纯天文几何解析方法自主导航的基本原理,其优点和缺点是什么由于天体在惯性空间中任意时刻的位置是可以确定的,因此通过航天器观测得到的天体方位信息,就可以确定航天器在该时刻姿态信息。
例如通过对三颗或三颗以上恒星的观测数据就可确定航天器在惯性空间中的姿态。
但是要确定航天器在空间中的位置,则还需要位置已知的近天体的观测数据。
举例来说,在航天器上观测到的两颗恒星之间的夹角不会随航天器位置的改变而变化,而一颗恒星和一颗行星中心之间的夹角则会随航天器位置的改变而改变,该角度的变化才能够表示位置的变化。
纯天文几何解析方法的缺点是不能直接获得探测器的速度信息,且位置信息的精度随量测噪声的变化起伏较大
对于探测较远星球的深空探测器来说,途中往往需要多次变轨及借力飞行,其轨道参数变化较大。
如使用滤波方法,则每次变轨时都需对轨道动力学方程进行相应的调整。
此时,可采用深空探测器纯天文几何解析定位方法。
纯天文几何解析方法根据深空探测器与天体间的几何关系,通过求解方程组获得深空探测器的位置信息。
9.MAN自主导航系统包括哪些敏感器?可以获得哪些测量信息?该系统有哪些显著特
点?
MANS自主导航系统包括双圆锥扫描式红外地球敏感器,两个扇形扫描式日、月敏感器
利用MANS自主导航敏感器扫描一圈可以得到七个独立的观测量:
1.太阳方向矢量(两个分量),
2.月球方向矢量(两个分量),
3.地球的地心方向矢量(两个分量)
4.航天器到地心的距离。
①基于一个导航敏感器的测量值即可以完成自主导航和三轴姿态确定的任务,可以应用于中
低轨道卫星和同步轨道卫星;
②导航敏感器由通常的单圆锥扫描式红外地球敏感器经过改进而成,质量轻、功耗低、成本低廉;
③具有中等导航精度;
④采用了轨道动力学,敏感器设计加工标定技术、地球环境特性研究、信息处理等领域当时最新的技术成果。
10.如图6所示的导航三角形,由北极N观测者假定位置AP和天体投影。