军用战术通信导航系统(2-JTIDS)第6章
战术军用通信

战术 多 信 道 网 从 组 织上 讲 极 象 当 代 的推 谈 式 单 信 道 无 线 电 网
. , , , , ,
和 管理 / 后 勤 网
这 些 是 高 度 集 中 的 中枢 型 网 只 有 极 少 的迂 回 路 由 可 供 利 用
—
单独 的作 战指 挥
。
实际部
署 时 在 中心 设 置 人 工 交 换 台 这 样 可 由操 作 员 来 实 现 呼 叫 交 换 而 非 那 种 恒 定 的 点 对 点通信
,
,
也 就 成 了 第 一 个 也 是 当 时 唯 一 的通 信 军 官
A
e n
.
其 后 通 信部 队 实现 了 不 少 技
Jo
u
Jo
s e
Ph
Be r
,
n
d le
r
,
“
a T
e
ti
a c
l
M il i t a )
r
y Ct io
n s”
,
m a l E le e
tr
o n
e ie D e f
在 这 种 通 信 体 系 中也 包 括 了 战 术 传 真 电报 机 它
.
,
们 通 过 应 用 博 多 码 以每 分 6 0 字 的 速 率发送 和 接 收 信息
;
。
通 信 兵 团研 究 的 战 术 多 信 道 无
线 电 和 电 缆系统 的 特 点 是 采 用 脉 冲编 码 调 制 所 用 的 仅有 的 战 术 电 话 交 换 台也 是 人 工
, ,
,
、
185 6
年 他 在 得 克 萨斯 当 军 医 主 任 ; 其 间 他 建 议 部 队 采 用 他 的 可 视 通 信 系 统 即 所
JTIDS信息结构分析
JTIDS信息结构分析作者:李亮,李杰然,张烨来源:《科学之友》2010年第06期摘要:联合战术信息分发系统(Joint Tactical Information Distribution System,简称 JTIDS)是美军先进数据链技术综合应用的集中体现。
本文在对JTIDS系统概况和工作原理进行研究的基础上,详细分析了其时隙及信息结构,对发展我军的数据链有一定的帮助。
关键词:JTIDS;信息结构;时分多址;时隙中图分类号:TN915.02文献标识码:A文章编号:1000-8136(2010)06-0155-021引言联合战术信息分发系统(JTIDS)是美军为适应联合作战,由三军统一研制的集通信、导航、识别等功能于一体的综合系统,是一个大容量、高速度、抗干扰、高保密性的信息分发系统。
它采用时分多址(TDMA)技术。
美海军JTIDS是Program Element 020260N战术数据链的一部分,该网络将机载、舰载和陆基平台的终端用户连接起来,实现信息共享。
JTIDS能在空军和海军平台中传递跟踪目标和武器协调信息,陆军也能产生并传回目标跟踪数据。
JTIDS的目标是为了在战术作战环境中进行抗干扰发布保密数字信息,以快速保密的进行指挥控制信息和敌方战术设备状态参数的交换。
其巨大的战斗力已在海湾战争中得到印证。
2时隙结构在单网络中,JTIDS采用TDMA方式,时隙是它的基本单位,将时间轴划分为128 min的时段,这些时段称为时元或周期,每一时元又分为12 s长的64帧,每一时帧又分为1 536个时隙,每个时隙长7.8125 ms。
因此,JTIDS每个网络中共有98 304个时隙。
网络中的各用户都分有若干时隙,在这些时隙内,把要传送的数据用通播方式输入到公共存取数据流中,其他所有用户都可以持续监视并提取所需信息。
多网结构中,JTIDS在时分基础上,进一步采用网络标识符,以码分多址方式形成多层网络。
第三章军事信息对抗技术

第三章军事信息对抗技术第三章军事信息对抗技术第一节通信对抗技术通信对抗技术是指为削弱、破坏敌方无线电通信系统的使用效能并爱护己方无线电通信系统使用效能的正常发挥所采取的各种技术措施的总称。
通信对抗技术的差不多内容包括:无线电通信对抗侦察技术(简称通信对抗侦察技术)、无线电通信干扰技术(简称通信干扰技术)、反通信侦察/抗干扰技术(简称通信防备技术)3部分。
其技术体系如图6-2所示。
一、通信对抗侦察技术(一)概述1、通信对抗侦察通信对抗侦察是指使用通信侦察设备对敌方无线电通信信号进行搜索截获、分析识别、监视跟踪以及测向和定位等,以猎取信息内容、技术参数、工作特点和辐射源位置等情报的活动。
通信侦察是通信对抗的一个重要组成部分,是实施通信对抗的前提和基础。
2、通信对抗侦察的要紧任务通信对抗侦察的要紧任务包括以下3个方面1)侦听侦收使用无线电侦听侦收设备,猎取敌方无线电通信信号技术参数(如工作频率、调制方式)和工作特点(如联络时刻、联络代号)等。
2)测向定位使用无线电侦听侦收设备测定敌方通信信号的来波方位,确定敌方通信电台的地理位置。
3)分析判定通过对敌方通信信号的技术特点参数、工作特点和电台位置参数的分析,查明敌方通信网的组成、指挥关系和通联规律,查明敌方无线电通信设备的类型、数量、部署和变化情形。
从而可进一步判定敌指挥所位置、敌军斗争部署和行动妄图等。
3、通信对抗侦察的特点通信侦察的目标是无线电信号。
这些信号是多种多样的,敌人在进行通信时总是千方百计地期望能顺利进行通信,通信的内容不被对方截获。
而作为侦察者则反之,总是期望能搜索、截获尽量多的敌方通信信号,以便从中分析出多的情报内容,作为干扰或攻击敌人的作战行动的情报依据。
在这种侦察与反侦察的对立斗争中,使得通信对抗侦察有如下特点:1)信号频段宽、数量多通信侦察需要覆盖无线电通信所使用的全部频率范畴。
从目前的技术进展情形看,那个频率范畴人约从几千赫兹到几十吉赫兹。
战术导航

谢谢观看
因为塔康属于军用系统范畴,其指示与民用机有所不同,一般塔康的方位和距离信息是依靠 HSI(HorizontalF-16飞机上的HSI。
伏尔导航系统
基本信息 性能
优点 缺点
中文名称:伏尔导航系统 外文名称:omnidirectional range-VOR 作用距离:200公里以上 定义:空中导航用的甚高频全向信标 应用时间:1950年被规定为国际标准民用导航系统 组成:由机载甚高频全向信标接收机、显示器和地面甚高频全向方位导航台组成
战术导航
军用导航系统
01 组成
Байду номын сангаас
目录
02 塔康导航系统
03 伏尔导航系统
04 主要涉及领域
05 中国国情
伏尔和塔康两地面台组合在一起军、民共用的极坐标导航系统。民用航空器常用伏尔台测向,用塔康台测距; 军用航空器则用塔康台测向和测距。对飞机相对信标测向、测距功能,是一种近程战术导航系统,所以也称为飞 机近程测向测距导航系统。它是北约和美军的一种标准军用导航系统。
跟DME一样,由于是工作在UHF频段,所以塔康最大作用距离取决于视线范围,所以作用距离随着高度变化。 因为塔康具有测向功能,除了受视线限制外,还存在顶空盲区(Cone of Silence)和测向盲区(如右示意图)。
测 向 盲 区 正 对 地 面 台 天 线 上 空 呈 圆 锥 形 , 夹 角 约 1 2 0 º, 在 该 区 域 飞 行 只 能 测 距 , 不 能 测 向 , 这 是 因 为 地 面 天 线的调制度太浅。测距容限主要取决于机载和地面台站设备两者的灵敏度、发射功率和电波传输损耗。
美国陆军地图读图及陆地导航手册--导航设备和方法
本章介绍如何根据地图,确定在地面上的位置。
能够知道你在哪里(当位置固定时),这一知识是成功的关键,大地导航保障了直接和间接火力,战术空中支援,和医疗后送等作业是否有效。
这对有效目标的获取;准确报道生化污染和各种危险区;(*NBC污染区,指的就是Nuclear, Biological, and Chemical (NBC) Contamination)并获得紧急补给至关重要。
很少有像类似”知道你在何出”这样重要的先决条件,它总是对部队和装备生存与否和完成任务与否密切相关。
本章包括解释地理坐标系,介绍通用横轴麦卡托网格与军事图格参照系,并如何使用图格坐标。
4-1.参照系在城市里,很简单就能找到一个地方;街道名和建筑门牌号。
唯一需要的就是地址。
然而,在未开发地区或者世界上不熟悉的地区,如何能够定位就是一个问题了。
就这个问题,已研发完成了统一精确的参照系来解决。
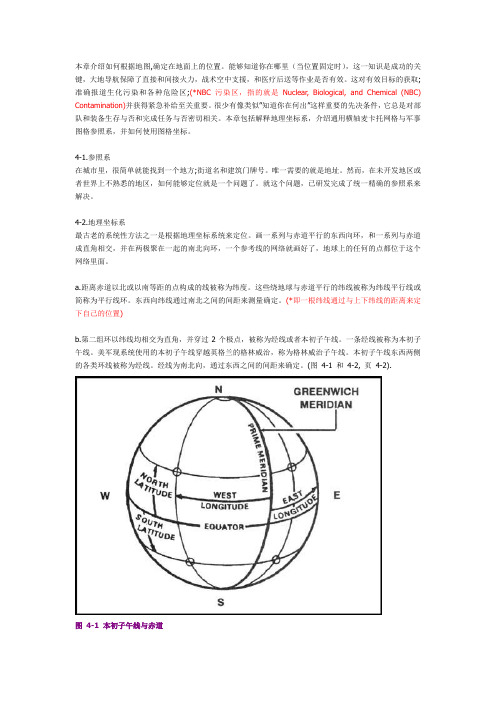
4-2.地理坐标系最古老的系统性方法之一是根据地理坐标系统来定位。
画一系列与赤道平行的东西向环,和一系列与赤道成直角相交,并在两极聚在一起的南北向环,一个参考线的网络就画好了,地球上的任何的点都位于这个网络里面。
a.距离赤道以北或以南等距的点构成的线被称为纬度。
这些绕地球与赤道平行的纬线被称为纬线平行线或简称为平行线环。
东西向纬线通过南北之间的间距来测量确定。
(*即一根纬线通过与上下纬线的距离来定下自己的位置)b.第二组环以纬线均相交为直角,并穿过2个极点,被称为经线或者本初子午线。
一条经线被称为本初子午线。
美军现系统使用的本初子午线穿越英格兰的格林威治,称为格林威治子午线。
本初子午线东西两侧的各类环线被称为经线。
经线为南北向,通过东西之间的间距来确定。
(图4-1 和4-2, 页4-2).图4-1 本初子午线与赤道图4-2 参照线在地球上任何一个位置,纬度的1度在地球上投影大概是111公里(69英里),1秒在地球上的投影大概是30米(100英尺), 经度的1度在赤道上投影的距离也是差不多111公里。
美军的联合战术无线电系统(JTRS)
美军的联合战术无线电系统(JTRS)
吴坤兴
【期刊名称】《舰船电子工程》
【年(卷),期】2002(000)003
【摘要】联合战术无线电系统(JTRS)无线电台系列是未来军事通信的基本组成部分,它是一种能与传统波形互操作的软件可编程和模块化通信系统,也能满足众多的军用和民用陆上、空中和海上平台的新通信系统要求.JTRSJ是实现2010年信息优势的联合构想目标的重要手段.现已经开发了一个系统参考模型,可用于指导使用通用硬件和软件体系结构来支持不同用户需求的系统体系结构设计.JTRS是一种价格合算的设计手段,允许用户通过重新预置应用软件来动态地改变能力.本文主要介绍JTRS的开发背景、体系结构和参考模型.
【总页数】5页(P45-49)
【作者】吴坤兴
【作者单位】中船重工集团第722研究所,武汉,430079
【正文语种】中文
【中图分类】E962
【相关文献】
1.航空通信、导航、识别综合技术的新进展—美军联合战术无线电系统评述 [J], 龚世明
2.联合战术无线电系统WNW波形研究 [J], 彭大展;张晶
3.美军的联合战术电台系统(JTRS) [J], 平良子
4.联合战术无线电系统研究 [J], 郝明
5.美军联合战术无线电系统研制进展概况 [J], 张海翔
因版权原因,仅展示原文概要,查看原文内容请购买。
数据链技术在军用航空通信技术领域应用的现状与发展

数据链技术在军用航空通信技术领域应用的现状与发展摘要:作为一种网络系统技术, 军用数据链技术应用了无线网络通信技术以及应用协议, 从而实现了陆基军用数据系统与航空武器平台间的信息共享, 并使军用系统的效能最大化。
本文对数据链技术的发展史、概念、特色、功能加以介绍, 研究了军用数据链技术及其应用的实际情况与发展方向。
关键词:数据链;军用数据链;战术数据链;在实践应用阶段, 在航空数据链技术的基础上, 能够及时传输信息并进行信息交换, 并为信息的安全性、军队协同作战能力的提升提供了有力保障。
1军用航空数据链的特点与功能所谓的军用数据链指的是借助无线电通信设备,基于相应数据通信规程下,将数据通信与计算机控制系统进行连接,为军事作战指挥提供实施可靠信息以实现科学作战决策的制定,并实现对武器系统的有效控制,并能够与陆军、海军间实现数据信息的实时交换与共享,进而为提高我国军队协同作战的能力奠定了基础。
基于军用航空数据链下,这一网络系统能够将指挥平台、武器平台以及情报网等进行连接,为实现信息的高效传输与处理奠定了基础,在实际进行应用的过程中,数据链技术呈现出了信息传输的实时性、可靠性以及安全性的优势作用,同时,还能够实现系统的自动化运行并实现信息格式的一致化转换奠定了基础。
2发展战术数据链的一些关键技术探讨随着技术的发展,需求的牵引,发展航空战术数据链系统,需要攻克多项关键技术。
(1)调制解调:将编码后的二进制信息流以适合于一定信道传输的RF波形方式发送,包括功率上升与发射稳定、同步(粗同步和精同步)、数据、功率下降与接收稳定、传输开销。
调制方式种类有BPSK、QPSK、8PSK、MSK、GMSK和TCM 等,调制方式的选择与系统信道带宽、速率要求和灵敏度都有关系。
(2)编译码:用于提高数据传输的可靠性,一种是要增加传输开销的,如前向纠错、增加冗余和校验等;另一种是不增加传输开销的,如交织、扰码和格雷编码等,但它需要增加处理器的开销。
JTIDS战术数据链相对导航效能分析
A s at T e ae it d csh o cpi dv arl o e li v ao ,rb e te bt c: h prnr ue tecnet na iloe fh av Nai t n aar sh r p o o n t t Re t e g i i z
pic l, rcd r n loi m f TI l ieNaiain B sd o i l in rsac ,tep p r r i e po e uea d a rh o DS Re t vgt . ae n s np g t J av o mua o eerh h a e t
信息的情况下, 通过测距确定与其它 网络成员的相对位 置和速度 , 实现 网络成员间的相互定位 , 网内各成员传 感器所获得 的情报信息可以互相交换 , 在一个共 同的相
对 坐标 系下 形 成 统一 的 敌我 态 势 , 而 利 于 网内成 员 之 从
位置数据才有意义 , 而地理坐标 系必须在具备精确 的地 理定位信息源的情况下才能建立起来 , 但相对坐标 系则 可 由编队成员不依赖外界信息源在相对导航过程 中 自
P r r a c a y i o lt e Na ia in Ba e e f m n e An lss fRea i vg t s d o v o
o TI c ia t i k n J Ta t I DS c Da a Ln
YI u I a g N L ,JN F n
21 0 0年第 3期
总第 11 1 期
通
信
(完整版)美军联合战术无线电系统(JTRS)
美军联合战术无线电系统(JTRS)系统简介21世纪的数字化部队将对通信速度、容量、互通性有更高要求,设备的规范化、小型化、扩展频段、减少电台品种和数量等是目前军事通信亟待解决的问题。
为此,美国国防部倡议的联合战术无线电系统(JTRS)计划将开发一种适用于所有军种要求的电台系统系列,它可覆盖2MHz~3GHz频段,后向兼容传统系统,实现多种新的先进波形,极大增强部队之间的互相通信能力。
JTRS将成为数字化战场环境中作战人员通信的主要手段,是未来军事通信的基本组成部分。
联合战术无线电系统(JTRS)计划是美国正在集中研制和生产能经多波段、模式和网络传输话音、视频和数据信号的一种无线电系统。
联合战术无线电系统将为美军各军种节约大笔经费,并提高其互通能力。
体系结构和关键技术1.JTRS的体系结构JTRS系统的体系结构是以国防部PMCS(可编程模块通信系统)综合小组指导文件定义的JTRS系统参考模型(SRM)为基础,将消除烟囱式的无线电台采购方式,增强互通能力。
SMR包括实体参考模型(ERM)和软件参考模型(SwRM),其中,ERM包含8个功能实体:RF、Modem、Black-side处理、信息系统保密(INNFOSEC)、网际互联、系统控制、人机接口(HCI)及一种临界系统(为满足国家安全局签署的要求而设的黑色互连和红色互连)。
SwRM涉及SMR中的各功能实体软件及这些实体之间的软件关系。
JTRS系统的开放性和模块化主要在软件中实现,因此,对软件的要求是:模块化,能适应不同硬件结构:可扩展,能适应质的增长(如功能、波形、网络、接口的增加);可伸缩,能适应量的增长(如模块加倍以适应多个信道):可移植,与硬件、互连方式、操作系统独立;可靠,将采用国家安全局“委托功能完备模块”进行设计;可复用,能提供波形、功能和基元库及其维护;开放性,将利用商用语言、接口和工具。
2.关键技术JTRS的实施将有赖于几项关键的启动技术,为此,美国国防高级研究计划局(DARPA)正在寻求解决一些关键技术,包括:(1) 射频微机电系统(MEMS)MEMS是采用整体表面微切削加工集成电路处理技术装配的电子或机械设备。
第6章 军用战术通信导航系统(1-PLRS)要点
1988年,海军陆战队完成了PLRS试验 设备及主控设备训练器的研制任务。
从1988年起到1990年,海军陆战队共 购买了12部主控设备和1500台用户设 备。
在此期间,休斯公司地面系统集团 (GSG)还获得了一项金额为3600万 美元的改型生产合同,为几北卡罗 来纳州和日本部署PLRS网络时,陆军却 在奋力解决增强型PLRS(即ADDS)研制 工作中的问题。
美国海军陆战队和陆军开始联合研制 一种新型的集通信、导航定位、识别 技术于一体的综合战术系统,这就是 定位报告系统(PLRS,Position Location Reporting System)。
最初的PLRS系统是由美国的海军陆战队主持研 制的。美国的通用动力公司和休斯飞机公司都 得到了该项目的研制合同。
试验之后,陆军和海军陆战队都派出各 自的装备评审委员会,于1982年3月联合 审议了关于PLRS有效价值的评审结果, 并决定是否进入生产阶段。
1984年9月和12月,海军陆战队和陆军先 后获得了第一套完整的PLRS系统。第二 个生产合同于1985年通过竞争投标方式 签订。1986年海军陆战队对PLRS的工程 研制模型进行了试验,并开始使用。
该系统除具有自由电文数据交换能力外,还能根 据请求将其引导到预定点,引导到其他部队。
对于战术指挥员来说,PLRS能够提供其规定责任 区内所有协同用户的标志、位置和移动情况。
能使指挥员输入和修改配合点、走廊和限制区域。 对于所有网内成员来说,该系统具有有效的电子 反对抗措施,并能进行保密数字通信。
工程研制阶段于1980年底完成,休斯公司向陆 军交付了两部PLRS主控设备和64台用户设备, 以进行为期一年的研制试验/使用试验。
试验于1981年9月结束,随后,陆军和海军陆战队 于10月至12月在德克萨斯州的胡德堡进行了联合使 用试验。
卫星导航在军事战略中的应用考核试卷
14. ABCD
15. ABCD
16. ABCD
17. ABCD
18. ABCD
19. ABCD
20. ABCD
三、填空题
1.卫星、地面控制站、用户设备
2.中国、亚洲
3. Global Positioning System
4.精确打击、战场管理、侦察监视
5.差分定位、多星共视
6.光速、299792.458
1.请简述卫星导航系统在军事战略中的应用及其重要性。
2.分析卫星导航系统在军事行动中可能面临的挑战和应对策略。
3.描述我国北斗导航系统的主要特点及其在国防和民用领域的应用。
4.探讨卫星导航系统未来发展趋势及其对军事战略的影响。
标准答案
一、单项选择题
1. D
2. A
3. A
4. D
5. A
6. A
7. A
6.卫星导航系统在所有天气条件下都能提供高精度定位。()
7.欧盟的GALILEO卫星导航系统完全独立于GPS系统。()
8.卫星导航系统只能用于室外定位。()
9.信号传播延迟是影响卫星导航定位精度的主要因素之一。()
10.卫星导航系统在未来将逐渐被其他技术取代。()
注意:请将答案填写在答题括号内。
五、主观题(本题共4小题,每题10分,共40分)
2.北斗导航系统是中国自主研发的卫星导航系统,其服务范围覆盖____和____。
3. GPS的全称是____,它是美国研发的全球卫星导航系统。
4.卫星导航系统在军事领域主要用于____、____和____等方面。
5.为了提高定位精度,卫星导航系统采用了____和____等技术。
6.卫星导航信号的传播速度接近____,即每秒约____公里。
军用战术通信导航系统(2-JTIDS)第6章
JTIDS系统时轴的划分如图所示。
6.2.2.2
一、相对导航
导航功能的实现
通常的系统成员都带有高度测量装置,且大部分 在同一高度层,而垂直高度和水平面是正交的, 所以JTIDS系统基本上是平面导航系统。 系统有一个导航控制者NC,它可以任意指定自 己的二维位置(XNC,YNC ) (实际上总是有一定的 准则),由此来确定系统的相对坐标原点; 同时,系统还有一个相对基准PR,它来确定系 统的坐标轴方向。
JTIDS的前身为Seek Bus和ITN/ITACS。
Seek Bus为美国空军在60年代后期研制的,以时分 多址为基础,以保密数字通讯为主,兼顾导航的一 种综合系统; ITN/ITACS为美国海军在60年代末期研制的一种以 完成相对导航为主,将通讯、导航、识别等功能组 合为一系统。
70年代中期时,美国国防部鉴于这两种研制方 案的目的一致,仅只是重点不同,所采用的技 术相似,因而将其合并为一,由空军负责领导, 各军种参加,定名为联合战术信息分发系统 (JTIDS)。
三、慢移相对格网
假如导航控制者和相对位置基准都可以借助于推 航系统得到自己带有误差的位置数据并在指定的 时隙发射出去; 假定导航控制者发布的相对位置数据是准确无误 的,而相对位置基准的y坐标是准确无误的,那么 相当于位置基准和导航控制者一起确定了相对坐 标系的方向 该相对坐标系随导航控制者和相对位置基准的位 置误差积累的共同作用而作缓慢的漂移。
系统中所有台站都是用户,共同构成通信、导航、识别网, 彼此通过保密通信,测量时差,在知道网中几个成员的位置之 后,可以计算出所有成员各自的位置、航向、速度等,完成相 对导航。 如果网中一个或几个成员失去功能,其他成员仍然照样工作。
④系统按时分多址工作。每个网成员大约10~12s播发 一次信息(对机载设备),彼此能够确知相对位置。
JTIDS相对导航中时差定位及其源选择研究
图 1 三源 位 置 配 置 图
的方便 , 并 且不 失 一 般 性 , 假
设 用户位于原点处 , 三 个 源 的
配 置 如 图 1所 示 。
则有 :
一
f ( b 2 1
<
二
 ̄ / ( x 一 + 一 一
一
t i —t o +r i / c +拖
ZHOU Ku n f a n g TONG Ha i pe ng ( Na v a l Ar ms Co mma n d Ac a d e my,Gu a ng z h o u 5 1 0 4 3 0)
A b s t r a c t Th i s p a p e r a n a l y z e d t h e J TI DS r e l a t i v e n a v i g a t i o n s TI 3 OA l o c a t i o n p r i n c i p l e a n d i t s e r r o r c h a r a c t e r i s t i c s . t h e n p u t f o r wa r d
U6 6 6 . 1
统相对定位精度 , 满足用户导航定位需 求。 关键词
中 图分 类 号
TD OA Lo c at i o n a n d S o ur c e S e l e c t i o n a b o u t JTI DS Re l a t i v e Na v i g a t i o n
周坤芳
( 海军兵种指挥学院
佟 海 鹏
广 州 5 1 0 4 3 0 )
摘
要
研究分析联合 战术信 息分发 系统 ( J T I DS ) 相对导航中时差定位原理及 其误差特性 , 提 出三源时差定 位的优化 配置 , 以提 高系 J TI D S ;时差定位 ; 几何精度 因子 ;导航源选择
军用导航定位系统能力需求的分析
200 0年以来,随着信息技术的不断进步, 人们的生活已经步入了信息时代, 信息化在改变人们生活的同时,也为战争注入了新的元素。
海湾战争、科索沃战争、阿富汗战争、伊拉克战争,美国发动的这几场战争每一次的技术含量都在增加,每一次的信息化特征都变得越加明显,它引导了世界军事变革的的发展趋势,也昭示着战争的信息化时代已经到来。
而在诸多技术组合形成的信息技术体系中,卫星导航定位技术扮演了相当重要的角色。
在战争中,美国的G P S系统为导弹提供制导信息,为军舰、飞机、坦克、部队提供精确导航和定位, 在海湾战争中一战成名的战斧式巡航导弹, 在其巡航阶段的制导就是利用G P S的导航定位能力完成的;为了加强小分队的作战能力,美军为进入沙漠地区的步兵分队配备了大量的G P S 终端, 著名的“左勾拳”行动和“蛙跳”式的作战方法也是在导航定位系统的支持下完成的。
导航定位系统在信息化战争中的重要性由此可见一斑,因此分析军队的信息化建设对导航定位系统的需求,使国产化的导航定位系统更加适应部队的实际需要,从而更好的为军队信息化建设服务具有非常重要的意义。
高精度的位置、速度和时间等导航信息服务, 用户的数量没有任何限制。
19 78 年2 月发射第一颗G P S 卫星, 19 94年3月24 颗卫星构成的星座部署完毕, G P S系统正式建成。
G PS 已广泛应用于美国各军兵种, 将常规导弹的命中精度提高了1 ~2 个数量级,具有对敌方目标实施定点打击能力。
同时,GP S还应用于海上舰船、陆地车辆、航空与航天飞行器的导航,以及大地测量、石油勘探、精细农业,地球与大气科学研究、移动通信等领域,逐渐成为人们工作和生活所必需的一部分。
与此同时, 前苏联筹建了(后由俄罗斯继承)类似于G PS系统的全球导航卫星系统(G L ON A S S ), 1982年10 月发射第一颗卫星,并于19 95 年1 2月配置完毕2 4 颗卫星星座,进入实际工程应用阶段。
JTIDS采取了哪些抗干扰措施

JTIDS采取了哪些抗干扰措施JTIDS(联合信息分发系统)是指美军及其盟友所装备的战术数据链系统,是Link-16的通道系统,决定了Link-16的数据吞吐率、成员容量、覆盖范围、抗干扰能力和保密特性。
出于探讨JTIDS具体原理的需要,这里重点会对JTIDS所具有的抗干扰措施进行分析。
JTIDS本身具有通信、导航和识别功能,而它的导航功能与识别功能的进行需要借助JTIDS 通信功能来完成,下面仅对通信功能的抗干扰措施进行分析。
应对战场复杂敌我电磁环境的需要,JTIDS共具有7种抗干扰措施,主要分为两大类,第一大类包括6种措施,他们分别是JTIDS的跳频、直序扩频、纠错编码、交织、时间抖动和双脉冲字符,第二大类即第7种措施是指检错编码,不同于之前6种措施在字符上施行,检错编码是在数据位上实施。
1.跳频,JTIDS信号脉冲的载频是在从960-1215MHz与宽255MHz频段内一共51个频点上伪随机选取,频点之间最小间隔3MHz,相邻脉冲之间频点间隔均大于等于30MHz,脉冲间隔13us,跳频速率为76923次/秒。
实际上JTIDS信号的跳频速率很快,并且脉冲之间载频间隔很宽,使得以频率跟踪方法实施干扰受到了影响,降低了对方干扰机效能。
2.直序扩频,在调制信号的时候,以伪随机序列代替二进制调制位,使信号频谱宽度得到扩展,,一般为扩展6.4倍,这样在对方使用连续波或其他伪随机序列作为干扰信号时,如果不能与本地伪随机序列相关,没有大的相关峰,便会失去32倍(15dB)的增益,干扰效能便会降低很多,同时伪随机序列均为经过保密数据单元(SDU)处理,首先要求加以严格保密。
3.纠错编码,JTIDS的通信消息本体均由4组93个字符组成,每组93个字符包括3个码字,每个码字有31个字符,,这31个字符便由RS码经过前向纠错编码后得到,只有15个字符载有信息,其余16个字符是在发设机中为在接收时纠错而附加上去的检错字符,JTIDS的接收机在设计时便尽量用抹去的方式对待有问题的字符,以最大限度保证战场上信息的可靠传输。
美军JTRS系统
JTRS的发展 的发展
JTRS计划于1997年8月获得美军TROC (联合需求审查委员会)批准,由投资最 多的陆军作为该计划的牵头兵种, 美陆军 为研制这种联合无线电制定了未来无线电 任务需求书。国防部成立了JTRS办公室 (JPO)负责制定和监督JTRS的发展进程 和过渡计 划。
第一阶段
JTRS体系结构定义研究 波音公司、摩托罗拉公司(软件电台21[SR-21C]公司)和雷声公司(模块化可 编程软件电台[MSRC]公司都参加了第一阶 段的JTRS计划,第一阶段已经于1999年6 月完成。
美国陆军、海军、空军和海军陆战队的人 员全都使用一种战术电台(包括多种型号, 而且手持式、背负式、车载式、机载式、 舰载式和固定式结构均可相互兼容),国 防部可以节省多大一笔研制和后勤保障费 用!而这正是美国防部和各军种联合战术 无线电计划的目的。国防部被责成使JTRS 成为全军四个军种未来的电台,所有其他 电台将逐渐被淘汰。1998年,高级别的国 防部政策备忘录停止了其它新电台的研制 工作,以迫使全军快点“过渡”到JTRS上。
JTRS, 联合作战无线系统
Joint Tactical Radio System 它支持话音,数据,和视屏传输 能与多种传统波形兼容,实现地区与地区, 组织与组织间 (包括直升机、 各军兵种)
一种适用于所有军种要求的电台系统系 它可覆盖2MHz~3GHz频段,后向 频段, 列,它可覆盖 频段 兼容传统系统,实现多种新的先进波形, 兼容传统系统,实现多种新的先进波形, 极大增强部队之间的互相通信能力 JTRS将成为数字化战 将成为数字化战 场环境中作战人员通信 的主要手段, 的主要手段,是未来军 事通信的基本组成部分
JTRS的性能 的性能
·频率范围:2MHz~2GHz,并综合有2GHz以上的军用和
(完整word版)直接序列扩频通信系统抗干扰性能分析

直接序列扩频通信系统抗干扰性能分析在现代战争中,通信对抗扮演着越来越重要的角色。
随着计算机技术、微电子技术等大量高新技术的应用,军事通信获得了长足的发展,尤其是跳频、扩频等一些新的通信手段应用之后,使得通信频谱越来越宽,通信的反侦察、抗干扰能力越来越强,迫使各国加紧对通信对抗技术以及装备的研制。
直接序列扩频通信由于其优良的多址接入、低截获概率、抗干扰和强保密等特性,使得它在军事通信、卫星通信和民用领域得到了广泛应用.在电子对抗中,对扩频通信的有效干扰成为制胜关键。
第一章研究背景介绍1。
1直扩通信研究背景现代战争首先是电子战,在电子战中失去优势的一方,将导致通信中断,指挥失灵等,从而丧失战争主导权。
两次海湾战争,前南斯拉夫战争以及阿富汗战争都是很好的佐证。
因此,通信对抗作为C4ISR系统的核心,越来越受到各国的重视。
通信对抗属于电子对抗,它包括通信侦察、通信干扰等主要对抗措施.通信对抗的目的在于:侦收和截获敌方信息,测量有关技战术参数;采用各种干扰方式阻止敌方正常通信并抑制敌方对我方的干扰,保证我方通信系统有效工作.扩频通信作为新型的通信方式,具有优良的抗干扰、抗衰落和抗多径性能及频谱利用率高、多址通信等诸多优点,并被广泛地应用于军事通信领域,极大地提高了通信系统的抗截获和抗干扰能力。
因此,扩频通信系统成为干扰方的首要作战目标,同时,扩频通信的抗干扰、抗截获、抗侦破特性给干扰方带来了巨大的困难.为取得现代电子战的胜利,针对扩频通信系统研究高效的干扰方式,如何有效的干扰成为取得现代电子战胜利的重要一环,对战时通信对抗具有重要意义。
1。
2直扩通信的军事应用情况1)直扩通信技术在舰艇卫星通信系统上应用广泛.国外舰艇卫星通信系统和国内舰艇卫星通信系统均采用码分多址通信方式,使用C波段。
这样网络组织与撤收灵活,通信质量高,频道使用少。
从目前使用看,这种方式充分发挥了直接序列扩频通信的特点,是扩频通信应用成功的范例。
美国军事卫星通信系统

美国军事卫星通信系统美国的军事卫星通信系统是世界上最先进、最有持续性的通信系统,不但技术先进,而且整体规划合理。
美国军事卫星通信系统可以由时间上划分为两部分,一部分是现有运行的系统:另一部分是计划中的系统,这部分属于美军卫星通信转型。
现有系统之间互有分工,各负其职;计划中的系统技术更为先进,将进一步提高战场连通能力;现有系统和计划中的系统之间更替有序。
了解美军卫星通信系统对我军通信系统的规划和设计有很大的借鉴意一、现有系统1.军事星军事星(Milstar)是美国军事战略战术中继卫星系统的简称,是一种极高频军用卫星通信系统,具有抗核加固能力和自主控制能力。
其抗干扰能力强,安全性和顽存性好,代表了当前军事通信的世界最高水平,能够满足战略和战术通信的需要。
军事星于20世纪80年代启动,共有两代,即军事星1(第一代军事星)和军事星2(第二代军事星)。
军事星星座由5颗卫星组成,其中有2颗军事星1和3颗军事星2,2003年该星座全部部署完毕。
两代军事星都服务于战略和战术通信,但军事星1有抗核加固能力,以战略通信为主;军事星2没有抗核加固能力,以战术通信为主。
其后续计划是先进极高频(AEHF)卫星系统。
军事星的有效载荷主要有低数据率(LDR)有效载荷、中数据率(MDR)有效载荷和星间交叉链路有效载荷。
其中,军事星1携带了低数据率和交叉链路有效载荷,而军事星2携带了低数据率、中数据率和交叉链路有效载荷(见表1和表2)。
军事星1和军事星2在低数据率通信和交叉链路上能够充分实现互操作。
军事星携带了交叉链路有效载荷,卫星无需经过地面站中转就可直接互连。
这样,地面终端发送和接收的信息可以由系统中其它卫星中继,并且有可能重选路由。
在发生核战争,地面控制系统无法工作的情况下,军事星仍可工作长达6个月。
2.国防卫星通信系统国防卫星通信系统(DSCS)是一个提供超高频(SHF)宽带和抗干扰通信的通信系统。
国防卫星通信系统共发展了3代,现在在轨运行的是国防卫星通信系统3。
对美军联合战术信息分发系统的通信干扰研究_王平军
对美军联合战术信息分发系统的通信干扰研究王平军,汪志凯,孙松涛(大连舰艇学院,大连116018)摘要:根据联合战术信息分发系统(JT I DS)的工作方式和信号特点,探讨了干扰JT IDS 的技术样式,分析了对JT IDS 进行组合干扰(由宽带噪声干扰与非相干瞄准式伪码扩频干扰构成)的效果,提出了有效干扰JT IDS 的具体方法。
关键词:联合战术信息分发系统;通信对抗;组合干扰中图分类号:T 975 文献标识码:A 文章编号:CN32-1413(2006)03-0003-03S tudy of Communication Jamming to The Joint Tactical InformationDistribution S ystem of American Military ForceWANG Ping -jun,WANG Zh-i kai,SU N So ng -tao(Dalian N aval Academ y,Da lian 116018,China)Abstract:According to the operation modes and signal characteristics of joint tactical infor -m ation distribution system(JTIDS),this paper discusses the technical mo des to jam JTIDS,analyzes the effect o f co mbined jam ming ag ainst the JTIDS,the combined jamming co nsists of broad band no ise signal and inco herent spo t pseudo random co de spreading -spectrum jam -m ing sig nal,puts forw ard the co ncrete m ethods to jam the JTIDS effectively.Key words:joint tactical inform ation distribution sy stem;com munication counterm easure;com bined jamm ing0 引 言联合战术信息分发系统(Joint T actical In -form ation Distribution System,简称JT IDS)是由美国三军统一研制的综合通信、导航、敌我识别系统,在20世纪80年代开始应用于美国空军战术通信,成为美国自动化C 4I 系统的重要组成部分,1991年春海湾战争期间已经投入实战使用。
基于延时相乘及其改进方法的JTIDS信号检测
总第 10期 1
通
信
对
抗
No2 2 1 . 0 0
S m. 1 u 10
C0MM UNI CAT1 0N C0UNTERM EAS URES
基 于延 时相乘及其 改进方 法的J I S信 号检测 TD
刘 鹏 , 建波 刘武刚 杨 ,
(. 1空军航空大学 , 吉林长春 10 2 ;. 3 0 2 2解放军 9 9 6 队, 33 部 宁夏银川 70 2 ) 5 0 5
( 双脉 冲 )脉 冲很密集 , , 因而检测方法 的选择 应注重时 效性和有效性 , 即选择 的检测 方法应尽量 简单 、 计算量 小、 易于实现 , 并能在低信噪 比下 实现有效检测 ( 本身并
体的综合 战术通信系统 , 有用户 多 、 具 保密性好 、 抗干
扰能力强 、使用灵活 、功能齐全等特点 …。它采用 了
Ke wo d : DS t — ea;u scin’orl o ;i a c aatr y r sJ TI ;i — l sbet — re t n s l h rc me d y o c a i n g e
1 引 言
联合 战术 信息 分发 系统 (o t ata I o a o Ji ccln r tn n T i fm i Ds i t n yt JI S 是集 通信 、 ir ui s m, D ) tb o S e T 导航 、 识别功 能 于
没有利用扩频信号 的隐周期特性 ) 。
1时域滤波互谱密度检测法 )
收稿 日期 :0 0 O — 9 2 1一 1 1
・
8 ・
通
信
对 抗
2 1 年第 2 00 期
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相对导航空间坐标系的建立有多种方案,下面 简要介绍几种方案。 一、静止相对格网
需要注意的是,相对位置基准不像导航 控制者那样在选择自己的坐标时具有二 维自由度,它只有一维自由度
通常来说它只能够指定与导航控制者的连线 与相对坐标系x轴之间的夹角θ, 然后通过与NC测距(时间同步之后)并接 收其播发的位置信息,从而获得自己的位置 在属于自己的时隙上向网内其他成员播发
x PR = x NC + ρ PRNC * cos θ y PR = y NC + ρ PRNC * sin θ
网内成员如果能够利用有源校时完成时钟 同步,并且能够测量到与NC和PR的距离, 接收到它们的导航电文,则可以通过如下 的测量方程来解算自己的位置坐标:
ruNC = ( xu − x NC ) 2 + ( y u − y NC ) 2 ruPR = ( xu − x PR ) 2 + ( y u − y PR ) 2
JTIDS是一种集团相对导航系统
系统中的每个成员均可通过无线通信实现 成员或各子网之间的信息共享 了解成员分布情况和系统的战备资源,从 而了解局部或整体的战争态势并提高总体 的作战能力
为了适应未来战争的需要,增强国防 力量,我国于八十年代初也提出一种 CNI系统,命名为TIS(Tactical Information System),即“战术信息 系统”,其原理和功能与JTIDS系统相 似。
通常,系统有两种方法可以完成精确的绝对 导航。
第一种方法称之为地理偏移法,该种方法比较简 单。
绝对位置基准在向网内播发相对导航电文的同时也播 发绝对导航电文。其他成员在收到之后,可以仅仅通 过电文决能够精确计算出绝对坐标和相对坐标之间的 偏移,包括平移和旋转。
这种方法只要求系统中有一个绝对位置基准,但 要求该绝对位置基准已经获得了精确的相对位置, 这样才不会影响其他成员的绝对导航精度。
整个系统时轴划分为时元(epoch)、时帧 (frame)、时隙(slot)。
每个时元为12.8分钟,它被划分为64个时长为12秒 的时帧,每个时帧又被划分成1536个时长为7.8125 毫秒的时隙。
系统将这些时隙按一定的规则分配给网中的各 个成员,每个成员在分配给他的时隙内辐射信 息,将自己的位置、速度、时间质量、位置质 量、航向等导航参量报告给其他成员
6.2 联合战术信息分发系统
6.2.1 概述 GPS仅仅能够提供高精度的导航定位,但 却不具有通信、敌我识别、指挥控制等功 能,而这恰恰是现代化战争所必需的。
究其原因,主要因为GPS是一种无源系统。
考虑到未来战争的需要,迫切需要建立有 源军事支持系统对GPS进行补充,实现集 导航、通信、识别、指挥、控制等功能于 一体的综合战术系统。
JTIDS系统的设计,充分考虑了对塔康系 统的兼容性。
JTIDS系统发射信号频谱扩宽,某一频率的 发射时间只有6.4us,不会影响塔康系统的 6.4us 工作性能。 另一方面,塔康系统的发射信号为窄带频谱, JTIDS系统的宽带和相关接收机不会受到干 扰接收,而且在频谱很宽和采用纠错措施后, 有干扰也被消除,恢复信息。
对于某些特殊身份的成员,有可能不允 许(保持无线电静默)或者不能进行有 源操作,这时候他就必须进行无源校时 和无源定位
该成员至少能够与3个以上已经完成时钟同 步的成员进行测距,同步、定位方程为:
ru1 = ( xu − x1 ) 2 + ( y u − y1 ) 2 + ( z u − z 3 ) 2 + ∆t u ru 2 = ( xu − x 2 ) 2 + ( y u − y 2 ) 2 + ( z u − z 3 ) 2 + ∆t u ru 3 = ( xu − x3 ) 2 + ( y u − y 3 ) 2 + ( z u − z 3 ) 2 + ∆t u
系统中所有台站都是用户,共同构成通信、导航、识别网, 彼此通过保密通信,测量时差,在知道网中几个成员的位置之 后,可以计算出所有成员各自的位置、航向、速度等,完成相 对导航。 如果网中一个或几个成员失去功能,其他成员仍然照样工作。
④系统按时分多址工作。每个网成员大约10~12s播发 一次信息(对机载设备),彼此能够确知相对位置。
JTIDS宽带工作时限制在960~1015兆赫的范 围内,并在1030兆赫和1090兆赫上完成梳齿滤 波,以保护空中交通管制不会受到它干扰。 窄带工作时,则限制在969兆赫附近,以免对 工作于980兆赫上的商用塔康(Tacan)产生显著 干扰。
①工作频段为960~1215MHz,与塔康处一个频率段。 ②采用扩频、跳频、检错纠错的伪随机脉冲编码技术, 具有很强抗有源干扰和防窃性能。 ③多节点或无明显控制中心的系统。
第二种方法称之为TOA地理定位
这种方法类似于上面讲到的相对定位方法。 系统中有两个或两个以上的绝对位置基准 在播发相对导航电文的同时播发自己的绝 对位置 其他成员通过测量与绝对位置基准之间的 (伪)距离,就可以确定自己的地理位置。 这种方法不需要绝对位置基准获得了精确 的相对位置,但却需要两个以上的绝对位 置基准。
JTIDS的前身为Seek Bus和ITN/ITACS。
Seek Bus为美国空军在60年代后期研制的,以时分 多址为基础,以保密数字通讯为主,兼顾导航的一 种综合系统; ITN/ITACS为美国海军在60年代末期研制的一种以 完成相对导航为主,将通讯、导航、识别等功能组 合为一系统。
70年代中期时,美国国防部鉴于这两种研制方 案的目的一致,仅只是重点不同,所采用的技 术相似,因而将其合并为一,由空军负责领导, 各军种参加,定名为联合战术信息分发系统 (JTIDS)。
另外,随着飞机性能的改进,为保证 飞行的安全性和充分发挥其作战性能, 对航空电子无线电设备的要求愈来愈 高,而其种类也越来越多。 在国外,一般说来,仅只为保证通讯、 导航、敌我识别,机上装备的电子无 线电没备的数量就超过数十种之多, 这就引起机舱拥挤、天线繁多、频带 拥挤、相互干扰严重等问题。
为解决上述问题,提出了综合化的概念。 所谓综合化,就是利用一种设备来同时 完成多种功能 。 这样既可以减少机上设备的数量(体积、 重量),又可以解决各设备间相互干扰的 问题。
整个系统成员被分成不同等级,处于位置最高 等级的是导航控制者NC和相对位置基准PR; 处于时间最高等级的是时间基准TR。
此外,系统中的其他成员按校时方式分为两级:一 级成员可直接对TR进行有源校时;二级成员仅能通 过一级成员进行有源校时或只能进行无源校时。
虽然NC、PR的相对位置误差和TR的时间误差 均为零,但所装备的端机和其他成员相同。成 员虽划分为不同等级,但可根据实际情况进行 等级。 JTIDS网络结构如图所示:
JTIDS系统是时分多址(TDMA)为基础,具有 强抗干扰能力、强生存能力、实现三军作战一 体化的战术系统,同时它也是一个分布式并且 无节点的集团相对导航系统。
整个系统由装备JTIDS端机的成员组成; 网络中的成员可以是作战集团的飞机、舰船、战车、 阵地、部队、指挥中心或单兵等。 成员随机分布于集团作战区域,通过JTIDS端机联 成无线电通讯网络,实现集团成员间的通讯、导航 和识别。
JTIDS网中成员只能在分配给自己的时 隙发播信号
此时作为网络的导航信号源为集团中其 他成员提供导航定位信息,
而在其他时隙该成员又成为用户
接收其他成员发播的导航定位信息进行 定位解算,得到自己在相对格网中的位 置,从而实现相对导航功能。
时分多址是成员通过与网络中指定的 时间基准同步之后,形成统一的系统 时来实现的。 由于该系统是分布式、无节点系统, 系统中的成员可依据实际情况随时增 减,成员等级可变更或转移,因而在 战争中具有很强的抗毁生存能力;
假设导航控制者和相对位置基准是静止不动的,并 且地理位置精确已知。 相对坐标系的原点在导航控制者所在的地球椭球面 上 XOY平面与原点处的椭球切平面相吻合。X轴指向相 对位置基准在XOY平面的垂直投影点。
二、快移相对格网 假设相对坐标系的原点与导航控制者 的运动保持完全同步
即原点的经纬度始终与导航控制者的经纬 度一致, XOY平面与该点处的椭球切平面相吻合, 相对坐标系的X轴仍然指向相对位置基准 在XOY平面的垂直投影点。
三、慢移相对格网
假如导航控制者和相对位置基准都可以借助于推 航系统得到自己带有误差的位置数据并在指定的 时隙发射出去; 假定导航控制者发布的相对位置数据是准确无误 的,而相对位置基准的y坐标是准确无误的,那么 相当于位置基准和导航控制者一起确定了相对坐 标系的方向 该相对坐标系随导航控制者和相对位置基准的位 置误差积累的共同作用而作缓慢的漂移。
6.2.2 工作原理
6.2.2.1 系统时、空配置 系统时、 系统是一种相对导航系统,其目的就 是在没有或者不能利用地理台站的情 况下,为整个系统中的成员提供精确 的相对定位; 在能够获得地理台站信息的情况下, 提供精确的绝对位置。 因此,JTIDS具有双格网导航的功能。
系统构成
JTIDS系统的网络组成至少包括一个导航控制 者NC(Navigation Controller),一个相对位置基 准RPR(Relative Position Reference)和一个时 间基准TR(Time Reference)。
鉴于上述两种情况,从六、七十年代起,欧美 等国就开始着手于研制和开发集上述功能于一 体的作战系统。CNI系统(Communication、 Navigation and Identification System)就是一 种集通信、导航和识别等多种功能于一身的电 子综合系统。 该系统可减少航行体上用于通信、导航、识别 的电子设备及外装天线的数量(体积和重量)、 降低设备间的干扰、节省能源、提高系统的可 靠性和精度、增强生存能力。