一种水下激光成像的新方法
论文水下光电成像技术简介

水下光电成像技术简介激光距离选通成像技术是当前国内外不断发展且应用有效的水下光电成像技术之一,国外20世纪90年代后陆续公开了一些水下光电成像探测系统和实验结果。
结合海洋资源勘探、水下救援和侦察等应用领域的需求,全面介绍并对比分析了当前国内外典型水下激光距离选通成像装置和性能水平,讨论了其技术特点,对水下激光距离选通成像技术的发展和装置应用具有意义。
激光距离选通成像技术是当前国内外不断发展且应用有效的水下光电成像技术之一,国外20世纪90年代后陆续公开了一些水下光电成像探测系统和实验结果。
结合海洋资源勘探、水下救援和侦察等应用领域的需求,全面介绍并对比分析了当前国内外典型水下激光距离选通成像装置和性能水平,讨论了其技术特点,对水下激光距离选通成像技术的发展和装置应用具有意义。
我国宽广的海域具有丰富的资源,但由于与周边国家存在一些海域的归属争议,特别是近年来对能源的需求和国际势力的插手,更加剧了我国周边海域出现战事争端和资源争夺的可能。
针对深海资源开发、海洋科研以及水下工程作业、考古和救援的迫切需求,研究适合载人潜水器、遥控潜水器、自治式潜水器、水下滑翔器、水下救援等高分辨力水下目标探测、观察、定位和分析技术成为国内外研究的重要方向。
目前水下成像探测技术主要有声探测和光电探测两种途径。
声探测技术探测距离较远,但成像的空间分辨力较差,难以完全适应高分辨力成像的需要;光电成像探测技术分辨力高,但由于光线在水中快速衰减,在一定深度以下往往需要辅助照明,且由于照明光后向散射的影响,使得人眼直接观察以及传统连续照明电视成像的有效作用距离较短,因此,提高水下光电成像系统的作用距离和细节分辨能力需要采用特殊的光电成像方法。
本文将重点分析国内外水下光电成像技术与系统研究进展,特别是激光扫描成像、偏振成像等几种特殊的水下光电成像技术,希望对国内有关方面的研究具有参考作用。
1 几种水下光电成像技术与系统国外从20世纪70年代开始主被动水下光电成像探测技术的研究,90 年代后陆续公开了一些水下光电成像探测系统和实验结果。
距离选通激光成像水体后向散射光能量分布计算

距离选通激光成像水体后向散射光能量分布计算随着光学技术的发展,研究人员开发出了一种有效的技术,即可以扫描水体表面的激光成像,从而测量水中分布的光能量。
这种技术可以提供一种实时获取水下环境信息的方法,从而支持水下监测和分析。
然而,这项技术需要计算水体表面后向散射光能量分布,以便获得更准确的结果。
激光成像水体后向散射光能量分布计算是一种复杂的仿真计算,主要由试验数据、仿真计算和实验验证组成。
首先,要选取合理的光源和水体表面材质,本实验使用激光作为光源,水体表面材质采用非导体材质。
然后,需要构建试验系统,并且进行实验测量,测量水体表面的后向反射能量分布。
接下来,利用获得的实验观测数据,通过仿真计算,得到光能量在水体表面上分布的准确状态,以便比较实验和仿真计算结果的差异。
最后,使用实验和仿真计算结果进行比对,得出激光成像水体后向散射能量分布的精确状态。
激光成像水体后向散射光能量分布的计算,有助于更加准确地测量水下光照度,可以更好地评估海洋水体环境,改善水体质量监测技术,提高水体环境评估的准确性。
这种技术可以更好地应用于渔业科学研究,监测水生动植物生物分布,研究可持续开发策略,等等。
因此,计算激光成像水体后向散射光能量分布具有重要意义。
在实际应用过程中,计算激光成像水体后向散射光能量分布的过程包括:(1)给定海洋水体环境参数;(2)准备激光源和光谱仪;(3)计算光源和海水表面散射后的照度分布特征;(4)通过仿真计算,获得海水表面的精确照度分布;(5)使用实验和仿真计算结果进行比对,得出精确的激光成像水体后向散射光能量分布结果。
在建立激光成像水体后向散射光能量分布计算模型时,需要考虑光源和反射表面的选择,提前准备实验所需的设备,并进行仔细设计实验以测量出水体表面的精确照度分布。
实验结果可以与仿真计算进行对比,以确定计算结果的准确性。
总之,激光成像水体后向散射光能量分布的计算是一项复杂的,但又重要的工作,它有助于更准确地测量水下环境并实施相关的评估。
水下成像技术的技术原理和发展动态
水下成像技术的技术原理和发展动态下成像技术在水下目标发现、海面材料探测及海洋地理工程中具有广泛而重要的应用价值,正受到各国研究者的日益重视。
与我们平常所见空气中成像技术不同,水介质的特性是强散射效应和快速吸收功率衰减,因此直接将摄像机运用到水中,由于强散射效应,图像的噪声很大,且距离有限。
激光器的运用从某种程度解决了成像的距离问题,在过去的几年中,成像距离和图像质量得到了很大程度的提高,这些进步都是因为采用了非传统成像技术和激光技术。
本文对主要的几种水下成像技术进行了分析,讨论了它们各自的技术原理和发展动态。
由上所述,与大气成像技术相比,水下成像技术的重点是要减小水这一特定介质所具有的强散射效应和快速吸收功率衰减特性对成像质量的限制,目前已经有几种成像技术在实际中得到应用且达到较好的工作效果。
⒈常规水下成像技术常规水下成像技术包括激光扫描水下成像和距离选通激光水下成像。
其中激光扫描水下成像是利用水的后向散射光强相对中心轴迅速减小的原理。
在这种系统中,探测器与激光束分开放置,激光发射器使用的是窄光束的连续激光器,同时使用窄视场角的接收器,两个视场间只有很小的重叠部分,从而减小探测器所接收到的散射光。
利用同步扫描技术,逐个像素点探测来重建图像。
因此这种技术主要依靠高灵敏度探测器在窄小的视场内跟踪和接收目标信息,从而大大减小了后向散射光对成像的影响,进而提高了系统信噪比和作用距离。
距离选通成像系统采用一个脉冲激光器,具有选通功能的像增强型CCD成像期间,通过对接收器口径进行选通来减小从目标返回到探测器的激光后向散射。
在该系统中,非常短的激光脉冲照射物体,照相机快门打开的时间相对于照射物体的激光发射时间有一定的延迟,并且快门打开的时间很短,在这段时间内,探测器接收从物体返回的光束,从而排除了大部分的后向散射光。
由于从物体返回来的第一个光子经受的散射最小,所以选通接收最先返回的光子束可以获得最好的成像效果。
水下激光距离选通三维成像方法
水下激光距离选通三维成像方法黄子恒;李微;杨克成;夏珉【摘要】基于水下距离选通激光成像技术,利用选通成像中回波强度相变化特性中包含的距离信息,提出了一种针对水下目标的三维成像方法。
结合实验室现有的水下距离选通激光成像系统,对15 m处的水下目标进行了三维成像。
这一方法有效抑制了水下成像系统中存在的目标表面材质、水体衰减以及目标各点法线方向与入射激光脉冲方向夹角不同等因素对于三维成像造成的不良影响,同时仅需要从单一方向对目标进行成像,减少了所需图像采集的次数,简化了三维重构的过程。
%According to the distance information in phase change characteristics of laser echo intensity in range-gated imaging system,a three dimensional imaging method for underwater target was presented. Combined with underwater range-gated laser imaging system in the laboratory,3-D images of the underwater target with a 15m distance was a-chieved. This method can effectively restrain some adverse impacts that caused by target surface materials,water atten-uation,the angle between the direction of incident laser pulse and the normal direction of target surface. This method doesn′t need to change the direction of observation,reduces the collection times of required image,and simplifies the 3-D imaging process.【期刊名称】《激光与红外》【年(卷),期】2016(046)011【总页数】5页(P1315-1319)【关键词】水下目标;距离选通;三维成像【作者】黄子恒;李微;杨克成;夏珉【作者单位】华中科技大学光学与电子信息学院,湖北武汉430074;华中科技大学光学与电子信息学院,湖北武汉430074;华中科技大学光学与电子信息学院,湖北武汉430074;华中科技大学光学与电子信息学院,湖北武汉430074【正文语种】中文【中图分类】TN2491999年,美国海军研究局最先展开了水下目标的三维成像的研究[1]。
水导激光技术

水导激光技术引言水导激光技术是一种新兴的激光技术,通过在水中传输激光,可以在水下进行各种应用。
本文将对水导激光技术的原理、应用以及未来发展进行全面探讨。
原理水导激光技术主要依赖于激光在水中的传输特性。
相比于空气中的传输,水中激光传输存在着吸收、散射以及色散等问题。
这些问题限制了水下激光传输的距离和清晰度。
为了解决这些问题,研究人员提出了一系列的改进方法。
其中包括使用特殊的激光波长、优化激光束的聚焦以及应用波导等技术手段。
通过这些改进,水导激光技术可以在水下实现高效的传输和控制。
应用水下通信水导激光技术在水下通信方面具有巨大潜力。
传统的水下通信方式受限于声波传输的带宽和延迟,而激光通信可以提供更高的数据传输速率和更低的延迟。
此外,水导激光技术还可以用于水下无线传感器网络的建立,实现对水下环境的实时监测和数据传输。
水下成像水导激光技术在水下成像方面具有独特优势。
通过优化激光束的聚焦和采用适当的激光波长,可以实现在水下获得高清晰度和高对比度的图像。
这对于水下勘探、海洋生物研究以及水下工程等领域具有重要意义。
水下激光加工水导激光技术还可以应用于水下激光加工。
通过将激光聚焦在水下工件上,可以实现对水下材料的切割、打孔、焊接等加工操作。
这对于海底油气开采、水下管道维护等领域具有广阔的应用前景。
水下激光测量水导激光技术在水下测量方面也具有广泛的应用。
通过利用激光测距原理,可以实现对水下物体的距离、形状和运动等参数的高精度测量。
这对于海底地形测量、水下导航以及海洋生态研究等领域都具有重要意义。
发展前景水导激光技术作为一种新兴的激光技术,具有广阔的发展前景。
随着激光技术和光学材料的不断进步,水导激光技术的传输距离和清晰度将会有进一步的提高。
此外,水导激光技术与其他技术的融合也将带来更多的应用创新,推动相关产业的发展。
然而,水导激光技术在实际应用中还面临一些挑战。
例如,水下环境的复杂性、水中散射和吸收的影响以及激光与水下材料的相互作用等问题仍需进一步解决。
水下激光成像系统设计及实验
第36卷,增刊红外与激光工程2007年9月V bl.36Suppl e m e nt I】臣6鼍red a nd I。
ase r Engi nee血g S e p.2007水下激光成像系统设计及实验杨述斌1,彭复员2(1.武汉工程大学电气信息学院,湖北武汉430073;2.华中科技大学电子信息工程系,湖北武汉430074)摘要:针对水下目标探测这一难题,设计了基于距离选通技术的水下激光成像系统并进行了相关实验。
从实验结果来看,该系统可有效克服激光后向散射并对水下目标进行成像,对于水下目标探测、识别十分有效。
,关键词:水下激光成像:距离选通;后向散射中图分类号:TN248文献标识码:A文章编号:1007—2276(2007)增(探测与制导)一0075.04 1飞■'●n l■■●●J_,e Sl gn ann eX per l m ent0I an U nner W at er I aSer l m a里qng SV St emW凼G Shu-bi I l l,PE N G Fu.yuan2(1.sch砌of Ele嘣cal&Ⅻb玎nali∞Eng.,w盯'‰430073,chiIla;2.呻t_of Elec咖ics&埘.o彻撕∞Eng.,邸sT,wuh姐430074删A bst r舵t:Unde刑a t er t a r ge t det e‘:t i o n i s al w ays di f!f i cul t.A n unde哪at er l a se r i m a百ng s ys t em isde si gl l e d bas ed on r an ge gat i ng aI l d re l a t e d exper i m ent s ar e pr oces s ed.T he exper i m ent s pr oved m at m ei m a gi ng s ys t em coul d ef f i c i e nt l y el i I I l i nat e backs cat t ered1a se r and、l nd er w at er t a唱e t i Im ge w鹊obt ai ned.ni s a ef!I[i ci em m e m od i n under w at er t a r ge t det e ct i on ar l d r e cogni t i on.K ey w or t l s:U nder w at er l a se r i m a百ng;R aI l ge ga廿ng;B a cks cat时0引言水下图像探测要获得好的效果,必须解决吸收和散射两方面的问题。
改善水下成像的方法(一)
改善水下成像的方法(一)改善水下成像的方法方法一:使用专业水下相机•使用专业水下相机能够提供高质量的水下成像效果。
•这些相机通常具有高分辨率的传感器和优秀的自动对焦功能。
•另外,它们还配备了防水外壳,能够在深度达到几十米的水下环境中正常工作。
方法二:使用水下摄影装备•使用水下摄影装备,如水下摄影灯和滤镜,可以改善水下拍摄的亮度和色彩。
•水下摄影灯能够提供足够的光线,使得拍摄的目标更清晰明亮。
•水下滤镜能够减少水中的色散效应,增强拍摄图像的对比度和饱和度。
方法三:进行后期调整和处理•通过后期调整和处理,可以进一步改善水下图像的质量。
•使用图像处理软件,如Adobe Photoshop,可以调整亮度、对比度和色彩平衡,以及去除水中的颗粒和杂质。
•另外,还可以使用图像增强算法,如去雾算法和增强对比度算法,提升图像的清晰度和细节。
方法四:选择适当的拍摄环境和时间•在选择拍摄环境和时间时,应尽量避免浑浊的水域和强烈的日光照射。
•浑浊的水域会导致图像模糊和色彩失真,而强烈的日光照射会造成明暗不均和过曝的问题。
•最好选择清澈的水域和适中的光线环境,以获得更好的拍摄效果。
方法五:改善拍摄技巧•除了使用专业设备和后期处理外,改善拍摄技巧也是提升水下成像质量的重要因素。
•尽量保持相机稳定,可以使用三脚架或其他稳定器来避免图像模糊。
•合理选择拍摄角度和距离,以突出水下目标的特点和细节。
•注意光线的方向和角度,以避免反射和阴影对图像的影响。
总结改善水下成像需要综合考虑设备的选择、拍摄环境和技巧,并进行适当的后期调整和处理。
通过采取上述方法,我们可以获得更清晰、明亮和准确的水下图像,为水下摄影带来更好的视觉体验。
方法六:使用水下无人机•水下无人机是一种新兴的技术,可以在水下环境中实现无人机的操控和拍摄。
•相比于传统的水下拍摄设备,水下无人机具有更大的灵活性和机动性。
•这些无人机通常配备了高清摄像头和专业的航拍控制系统,能够获取高质量的水下图像。
水下成像技术
水下激光成像技术5 水下激光成像技术本文主要介绍了近年发展起来的三种主要的激光水下成像方法,即常规水下激光成像、高分辨率水下激光三维成像和偏振激光成像,分析了它们各自的工作原理、特点以及各自的发展状况。
水下成像技术在水下目标发现、海面材料探测及海洋地理工程中具有广泛而重要的应用价值,正受到各国研究者的日益重视。
与我们平常所见空气中成像技术不同,水介质的特性是强散射效应和快速吸收功率衰减,因此直接将摄像机运用到水中,由于强散射效应,图像的噪声很大,且距离有限。
激光器的运用从某种程度解决了成像的距离问题,在过去的几年中,成像距离和图像质量得到了很大程度的提高,这些进步都是因为采用了非传统成像技术和激光技术。
本文对主要的几种水下成像技术进行了分析,讨论了它们各自的技术原理和发展动态。
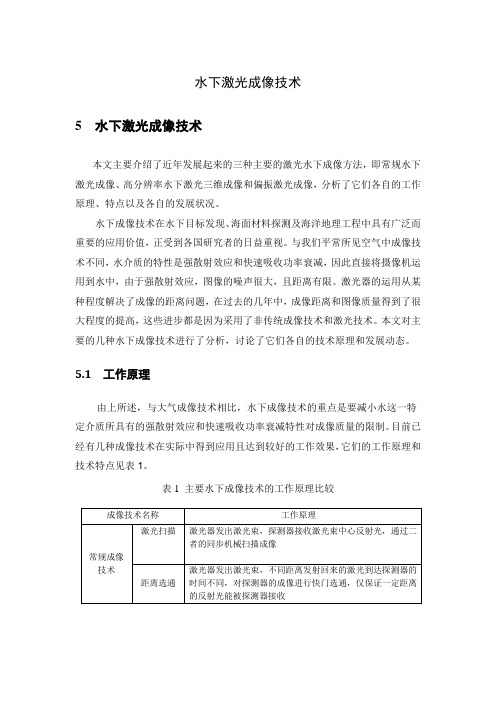
5.1工作原理由上所述,与大气成像技术相比,水下成像技术的重点是要减小水这一特定介质所具有的强散射效应和快速吸收功率衰减特性对成像质量的限制。
目前已经有几种成像技术在实际中得到应用且达到较好的工作效果,它们的工作原理和技术特点见表1。
表1 主要水下成像技术的工作原理比较5.1.1常规激光水下成像技术常规水下成像技术包括激光扫描水下成像和距离选通激光水下成像。
其中激光扫描水下成像是利用水的后向散射光强相对中心轴迅速减小的原理。
该技术采用准直光束点扫描和基于光电倍增管的高灵敏度探测器的窄视域跟踪接收。
如图1,在这种系统中,探测器与激光束分开放置,激光发射器使用的是窄光束的连续激光器,同时使用窄视场角的接收器,两个视场间只有很小的重叠部分,从而减小探测器所接收到的散射光。
利用同步扫描技术,逐个像素点探测来重建图像。
因此这种技术主要依靠高灵敏度探测器在窄小的视场内跟踪和接收目标信息,从而大大减小了后向散射光对成像的影响,进而提高了系统信噪比和作用距离。
距离选通成像系统采用一个脉冲激光器,具有选通功能的像增强型CCD成像期间,通过对接收器口径进行选通来减小从目标返回到探测器的激光后向散射。
海底资源勘探的新技术
海底资源勘探的新技术随着人类对海洋资源需求的不断增长,海底资源勘探变得越来越重要。
传统的海洋探测方法,如声纳、磁力计、地震探测等已经不能满足现代海底资源勘探的需求。
因此,科学家们正在研究开发新的技术,来更准确地探测海洋深处的宝藏、能源。
一、“激意”探测技术“激意”探测技术是指使用强光激发物质的内部效应来探测海底物质。
这项技术可以通过改变激光的波长、强度和方向来探测各种不同类型的海洋物质。
例如,当激光照射到水下的金属物体时,会引发脉冲扰动,产生一系列谐波信号,通过这些信号可以获取金属物体的精确位置和形态。
此外,激光探测还可以探测海底沉积物,识别深处水下岩石结构,或者探测油气藏。
二、超导磁致伸缩包络探测技术超导磁致伸缩包络探测技术是一种高灵敏度、高分辨率的海底探测技术。
它利用超导磁性材料的特殊性质,通过传感器探测海底电磁场变化。
这项技术可以探测流体的运动、地震活动、热带气旋和地磁异常等,还可以识别海底油气藏的位置和大小、鱼类的位置和数量。
由于具有高度的分辨率和灵敏度,已被广泛应用于科学、军事、环境保护等领域。
三、声学干涉成像技术声学干涉成像技术是一种精确的海底地质成像技术,通过声波传导来探测海底地形和地下结构。
这项技术利用声波在海洋中的传播规律,利用海洋中存在的声源,如自然声源或人工声源,来获取海洋地质信息。
声学干涉成像技术已经被广泛应用于海洋勘探领域,例如地质构造、沉积物分布和油气藏的探测。
四、水下机器人探测技术水下机器人探测技术是一种远程探测技术,通过远程操控水下机器人来进行海底勘探。
水下机器人可以搭载各种传感器设备,如摄像头、声纳和磁力计,并能够精准地测量海底地形和地下结构。
这项技术广泛应用于海洋资源勘探、环境监测、海洋科学研究等领域。
总结:海底资源勘探是一个极为挑战性的领域,需要应用多种技术手段进行精确探测。
通过开发新的技术,例如“激意”探测技术、超导磁致伸缩包络探测技术、声学干涉成像技术和水下机器人探测技术,科学家们能够更准确地探测海底深处的资源,帮助人们更好地认识和利用海洋。
水下光学成像技术及应用

2021.16科学技术创新水下光学成像技术及应用孙鹏(上海瑞洋船舶科技有限公司,上海201108)水下成像技术主要应用于水下作业,在水这种介质中传播时光的能量会有较多损耗,同时容易产生光噪声,而且光在水中会发生折射和散射,这样一方面会造成光的能量受损成像质量差,另一方面系统成像距离受损。
在水下成像技术发展的初级阶段,虽然能通过增加光的强度的方法改善成像效果,但光会出现反向噪声的问题。
近年来激光技术得到了广泛研究与发展,激光被应用到水下成像技术,发展出了水下激光成像技术。
采用激光,能改善光的散射效应和吸取功率减退效应,这样一来水下成像质量得到了极大的提高,同时也增加了勘测的距离。
目前水下激光成像系统广泛应用于海洋开发、军事、工程应用方面,比如海上走私船监视、海上军事装备的检修与监控、海底军事目标的搜查以及海底隧道的勘测维修等。
近几年水下成像技术发展迅速,在实用阶段取得了良好的效果,尤其是在系统成像深度及效果方面进步显著,这些进步与激光技术和先进成像技术的发展密不可分。
但是在面对内河水域,尤其是水质浑浊甚至潜水员在水下的能见度为零的时候,常规水下成像技术显得力不从心,在确定水下物品价值、水下物品型号等方面显得捉襟见肘,无法及时完成水下作业的前期考察准备工作。
因此在浑水、含泥沙量大、潜水员在水中能见度为零或近似于零的水域下研发一种浑浊水域水下光学成像设备称为当前亟待解决的技术问题。
1水下成像技术原理及其重要性在自然环境下,高效获取图像信息并对其进行处理和分析较为困难,这是因为在光学成像系统内,其自身的能见度和所得图像的对比度过低,无法得到高质量图像信息。
具体而言,光在水体中存在能量损失和散射,使得有效光线在传输过程中失真,造成成像模糊,无法达到水下勘测目的。
此外,光在水中受水中物质影响会出现光噪声,对目标反射光造成了很大的干扰,这会降低图像的对比度。
因此水下光学成像退化的主要原因就是水会不同程度地吸收不同光波;水中悬浮颗粒造成光的散射;当光穿过水体时,水体中存在多种物质的单位长度对不同光波的光的衰减作用各不相同,这会导致图像的颜色失真。
探测技术▏激光水下成像技术及其进展
探测技术▏激光水下成像技术及其进展水下成像技术在水下目标发现、海面材料探测及海洋地理工程中具有广泛而重要的应用价值,正受到各国研究者的日益重视。
与我们平常所见空气中成像技术不同,水介质的特性是强散射效应和快速吸收功率衰减,因此直接将摄像机运用到水中,由于强散射效应,图像的噪声很大,且距离有限。
激光器的运用从某种程度解决了成像的距离问题,在过去的几年中,成像距离和图像质量得到了很大程度的提高,这些进步都是因为采用了非传统成像技术和激光技术。
本文对主要的几种水下成像技术进行了分析,讨论了它们各自的技术原理和发展动态。
一、工作原理由上所述,与大气成像技术相比,水下成像技术的重点是要减小水这一特定介质所具有的强散射效应和快速吸收功率衰减特性对成像质量的限制,目前已经有几种成像技术在实际中得到应用且达到较好的工作效果。
⒈常规水下成像技术常规水下成像技术包括激光扫描水下成像和距离选通激光水下成像。
其中激光扫描水下成像是利用水的后向散射光强相对中心轴迅速减小的原理。
在这种系统中,探测器与激光束分开放置,激光发射器使用的是窄光束的连续激光器,同时使用窄视场角的接收器,两个视场间只有很小的重叠部分,从而减小探测器所接收到的散射光。
利用同步扫描技术,逐个像素点探测来重建图像。
因此这种技术主要依靠高灵敏度探测器在窄小的视场内跟踪和接收目标信息,从而大大减小了后向散射光对成像的影响,进而提高了系统信噪比和作用距离。
距离选通成像系统采用一个脉冲激光器,具有选通功能的像增强型CCD成像期间,通过对接收器口径进行选通来减小从目标返回到探测器的激光后向散射。
在该系统中,非常短的激光脉冲照射物体,照相机快门打开的时间相对于照射物体的激光发射时间有一定的延迟,并且快门打开的时间很短,在这段时间内,探测器接收从物体返回的光束,从而排除了大部分的后向散射光。
由于从物体返回来的第一个光子经受的散射最小,所以选通接收最先返回的光子束可以获得最好的成像效果。
在水中显示光路的方法
在水中显示光路的方法
在水中显示光路的方法有多种,以下是两种常用的方法:
1. 激光条纹法:这种方法通过向水中投射一束聚焦的激光,使得激光光束在水中形成一束束明亮的光线,从而显示出光的传播路径。
这种方法通常需要在水中添加一些悬浮颗粒或者胶体物质,以增加光线的散射效果,使得光线更加清晰可见。
2. 荧光染料法:这种方法使用荧光染料将水中的光路可见化。
通过在水中加入一种荧光染料,并使用特定的波长的光源照射水体,荧光染料会吸收光能并重新辐射出其他波长的光线。
通过观察这些重新辐射的光线,可以直接看到光的传播路径。
这些方法都是通过将光进行散射或荧光的方式来实现在水中显示光路的效果。
选择何种方法取决于具体的应用场景和实验要求。
一种水下激光成像设备最大衰减长度测量装置及方法[发明专利]
![一种水下激光成像设备最大衰减长度测量装置及方法[发明专利]](https://img.taocdn.com/s3/m/bce47c67cc22bcd126ff0cf3.png)
专利名称:一种水下激光成像设备最大衰减长度测量装置及方法
专利类型:发明专利
发明人:段志姣,王宇,肖恒兵,唐耿彪,徐列群
申请号:CN201610895399.3
申请日:20161012
公开号:CN106643515A
公开日:
20170510
专利内容由知识产权出版社提供
摘要:本发明提供一种水下激光成像设备最大衰减长度测量装置,其包括:一试验水槽、一移动导轨、一目标靶安装与方位调节机构、一水下目标观察窗口、一激光测距仪、多个高度可调的脚轮以及一计算机;移动导轨安装在试验水槽纵向的两条长边的上方;靶板安装与方位调节机构跨接在移动导轨上,可在移动导轨上沿试验水槽纵向做水平位移;水下目标观察窗口为透明材质,安装在试验水槽的一端;激光测距仪安装在试验水槽上带有水下目标观察窗口的一端上方;脚轮安装在试验水槽下方;计算机位于水下目标观察窗口前方。
本发明还提供一种水下激光成像设备最大衰减长度测量方法。
申请人:华中光电技术研究所(中国船舶重工集团公司第七一七研究所)
地址:430070 湖北省武汉市洪山区雄楚大街981号
国籍:CN
代理机构:武汉凌达知识产权事务所(特殊普通合伙)
更多信息请下载全文后查看。
涡旋光在水下成像中的应用
涡旋光在水下成像中的应用
涡旋光在水下成像中有许多应用。
1. 在水下通信中,涡旋光可以传输更多的信息量。
传统的光通信中,光波被认为是平面波,只能传输二进制的信息,而涡旋光携带着自旋角动量,可以传输更多的信息,提高通信速率。
2. 在水下成像中,涡旋光可以提高图像分辨率。
传统的成像系统在水下由于光在水中的折射,图像会发生模糊。
而涡旋光携带着自旋角动量,可以在成像过程中恢复图像的高分辨率。
3. 在水下测量中,涡旋光可以提高测量精度。
传统的测量方法在水下由于光的散射和折射会受到干扰,而涡旋光具有较高的光学稳定性和鲁棒性,可以提高测量的准确性和稳定性。
4. 在水下导航和定位中,涡旋光可以提高位置识别的精度。
传统的位置识别方法在水下容易受到水流等因素的干扰,而涡旋光的自旋角动量可以提供更稳定的参考坐标,提高定位的精度。
总之,涡旋光在水下成像中的应用可以提高通信速率、图像分辨率、测量精度和位置识别的精度,具有广阔的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种水下激光成像的新方法Ξ郑 冰1,孙骁禾1,粟 京2(1.中国海洋大学信息科学与工程学院,山东青岛266071;2.中海石油研究中心,北京100027)摘 要: 在我国沿海近岸,急需通过激光同步扫描方法建立1套浑水观测系统,解决水下视觉问题。
本文研究了激光在水下的传输特性,结合散射光的分布特性,确定同步扫描的光学结构设计,通过对获得的系统各类信号特性的分析,设计合适的成像系统;并从理论和水池试验两方面分别论证了这种系统消除散射影响的有效性;论述了这种系统在浑水中的宽视角场和全景深的优良特性。
关键词: 水下激光成像;同轴同步扫描;高速电机飞线扫描中图法分类号: P733.3+3 文献标识码: A 文章编号: 167225174(2006)012119204 近十几年来,由于陆地资源紧缺,特别是能源紧缺,人们十分重视海上石油和天然气的开发。
由于资源开发活动主要集中在海底,因此近几年来国际上转向发展浑水中的观察技术,研究水下激光成像,这已经成为海洋开发技术中的重要环节之一。
水下激光成像是在浑水中进行的,由于水介质对光的吸收和散射,不但光能量损耗很多,而且水介质产生的严重的散射光,降低了成像质量[1]。
如何克服后向散射及利用目标前向散射来更好的提高成像距离和成像质量,目前可归结为2种方法———同步扫描法和距离选通法,距离选通已较少使用[124]。
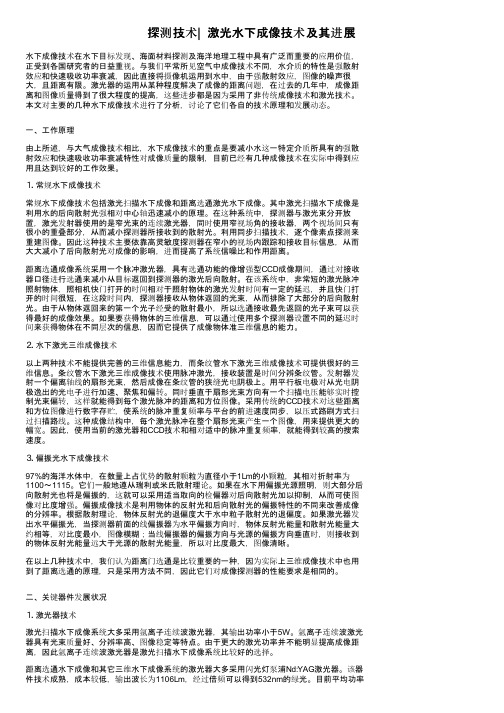
1.Synchronization controlser scanning device3.Back multi 2scattering4.Back one 2way scattering5.Incident laser6.Forward scattering7.Reflected laser8.Receiver图1 同步扫描水下激光成像系统的光路原理图Fig.1 The principle of the underwater lasersynchronization scanning system图1是同步扫描水下激光成像系统的典型光路图。
光在水中传播,接收器接收的光信息主要由3部分组成:从目标反射回并经水介质吸收、散射损耗后的成像光束;光源与目标之间水介质散射的后向散射光;目标与接收器之间水介质散射较小角度并直接影响目标细节分辨率的前向散射光[1]。
其中后向散射光是最主要的影响因素,在浑水中多次散射光影响图像清晰度尤为重要[1]。
水下激光成像还受其他一些水下环境因素的干扰,像太阳光、水质混浊度等,但是这些影响可以用很多方法来去除,所以影响成像的主要因素是散射光[1]。
因此在混浊水中的水下观察问题既要解决散射光噪声又必须同时解决多次散射光的影响。
1 同轴同步飞线扫描技术1.1理论分析激光束在浑水中传播时,接收光学系统单程接收到的多次后向散射光分布与单程散射光分布结果是不一样的。
研究表明,在浑水中,单次散射光形成的光带将很淡,而多次散射光将充满整个视场。
因此解决浑水中的水下激光观察必须解决多次散射和近距离的强烈单程散射光噪声。
从浑水中水下激光传输接收理论,和目标前向多次散射光信息的利用研究分析,浑水中多次散射光的路径是随机且无法控制的,因此目前国际上提出的用激光距离选通是无效的。
在研究同步扫描的基础之上,本文提出了同轴同步飞线扫描方法,如图2所示。
近距离A 区内强烈的单程和多次散射光用全反射法进行隔离,而B 区域中的多次和单程散射光用同步扫描法加以隔离,使散射光影响降到最低限度。
并且观察系统可获得其他激光系统所不具备的性能———宽视角和全景深的观察性能。
Ξ基金项目:国家高技术研究发展计划项目(2001AA602022)资助收稿日期:2005203211;修订日期:2005204218作者简介:郑 冰(19682),男,硕士,副教授。
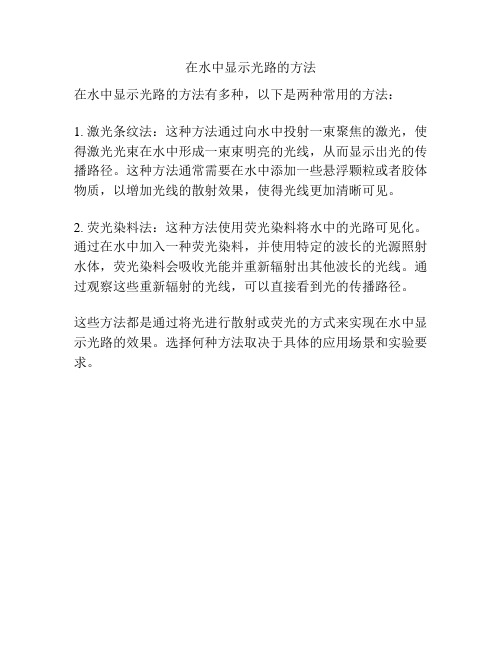
E 2mail :bingzh @第36卷 第1期 2006年1月 中国海洋大学学报PERIODICAL OF OCEAN UNIV ERSITY OF CHINA36(1):119~122Jan.,2006ser emitter2.Scanning system3.Coaxial frame scanning hexahedron4.Target5.Receiving lens6.SlitD or PEM 8~9.Window图2 同轴同步飞线扫描法的光路图Fig.2 The principle of the coaxial synchronization scanning system1.2同轴同步飞线扫描方法同轴同步飞线扫描方案的工作原理如图2所示。
激光器(1)发射的激光束通过扩束器(或高速行扫描器)展开形成1条飞线。
进行自上而下垂直行扫描,再经过同轴帧扫描六面体把行扫描线进行水平扫描,通过水密窗口(9)对海底目标(4)进行二维光栅式扫描照明。
激光束扫描照明到C时,目标直接反射光及其前向多次散光通过窗口(8)及同轴扫描六面体(3),再经过接收物镜(5),会聚到狭缝(6)上,最终进入接收器(7)(CCD或光电倍增管)上,此系统的水平扫描角120°,垂直扫描40°。
而接收仅开1条适当宽的狭缝,这样把上图B区内的大部分多次散射光就被消除掉;适当调整发射窗口(8)和(9)的夹角,利用水是光密介质,窗口(8)内是空气(光疏)及二窗口间有一定光轴距S的关系,根据全反射原理就可把近距离(A区)内的强烈单程散射光和多次后向散射光消除掉。
同步扫描方法光学设计的困难点是接收口径不能太大,否则整个系统的体积太大,导致无法使用。
本方案采用多面体双面接收,光路图见图3。
接收多面体与帧扫描镜同轴旋转,在每一个时刻多面体的双面均接收到光线,因此在较小体积下得到了较大的口径。
由于实际设计的接收多面体体积不能太大,所以很难保证各方向上光线全部接收。
但是能保证在水平视场的边缘部分,接收到的能量也超过视场中间部分能量的60%,因此系统整个视场是比较均匀的。
图3 多面体双面接收光路图Fig.3 The principle of polyhedron double side receiving本方法综合考虑光线在浑水中吸收散射特性,既考虑到消除后向散射,又利用目标反射的多次前向散射作成像光束。
并且由于采用了多面体双面接收方案,得到了小体积下大口径、视场均匀等优良光学性能。
021中 国 海 洋 大 学 学 报2006年2 高速电机飞线扫描系统及实验2.1系统上述同轴同步飞线扫描方法,可以通过2种系统来实现,既激光扩束飞线扫描系统和高速电机飞线扫描系统。
激光扩束飞线扫描系统所使用的接收器是CCD ,高速电机飞线扫描系统使用的是光电倍增管。
前者使用的是几何光学成像方法,成像质量与景深有关,而后者属于能量成像,成像质量与景深无关。
此外两者在成像速率上也有差别。
经过实验表明,对于CCD 本身来讲,高速扫描与其灵敏度的高低是一对矛盾,相互制约。
目前的线阵CCD 的灵敏度在高速扫描的情况下达不到要求,本系统采用高速电机飞线扫描方案。
高速电机飞线扫描原理框图如图4所示。
1.Displayer2.Video signal composing3.Amplifier4.Synchronization signal composing5.PEMser7.Line scanning device8.Frame scanning device9.Slit scanning device图4 高速电机飞线扫描原理框图Fig.4 Block diagram of the high s peed electrom otor scanning system2.2实验及结果分析水池试验的目的主要是验证本系统是否与理论上所计算的作用距离相一致,考察系统是否达到所要求的观察距离及分辨率的指标。
实验中目标为相隔10cm并排的钢管。
实验1条件:透明度为0.5m 时距离0.3m ,效果如图5所示。
0.3m 时的分辨率为2mm ,管子直径为15cm 中间距离10cm 。
实验2条件:透明度为0.5m 时距离0.3m 。
图6为实验目标分辨率板,在实验2条件下的成像效果图如图7所示。
图5 实验1的成像效果图Fig.5 Imaging effect of Experiment 1图6 实验中用到的目标分辨率板Fig.6 The target board in the experiment图7 实验2条件下的成像结果Fig.7 The imaging result of Experiment 2图8 实验3条件下的成像结果Fig.8 The imaging result of Experiment 31211期郑 冰,等:一种水下激光成像的新方法实验3(最远距离)条件:透明度为0.9m时距离1.1m,实验目标分辨率板为图8。
以上3个实验表明,在水池中用高速电机飞线扫描所得出的图像的分辨率在2mm以内,显示图像较清晰,能够满足水下工程观察的需要。
3 结语在5320激光输出功率50mW情况下,同轴同步飞线扫描方法的观察距离在混浊水质中达4AL。
并且视场较大(水下90°×30°),景深较大,无盲区。
所以本系统较好地隔离了单程和多次散射光,能获得比较清晰的图像,若激光的功率增大到1000mW时,混浊水中视距可达5.5AL,达到在水下工程中的观测要求。
所以本系统在水下许多活动中可广泛应用,可用于浑水海域中海底管线的水下观测工作,以检查海底管线受海流冲刷产生的悬跨和损伤等情况,解决一般水下电视在浑水海域难以观测的问题。
参考文献:[1] 刘雪明,张明德,张小菡.同步扫描水下激光成像系统主要参数的分析[J].东南大学学报,1999,29(1):1292134.[2] 张博,刘智深,丁田夫.水下激光线扫描探测系统的设计及试验[J].青岛海洋大学学报,2004,34(4):6552661.[3] Marshall L R.Blue2green laser plumb the mysteries of the deep[J].Laser Focus World,1993,(4):1852195.[4] 郑冰,李欣,谭锐,等.激光扫描实时获取水下图象信息的方法与系统[J].青岛海洋大学学报,2000,30(4):7012705.[5] Jaffe J puter modeling and the design of optical underwaterimaging system[J].IEEE Journal of Ocean Engineering,1999,15(2):1012111.[6] 章正宇,周寿桓.水下目标探测中的激光技术[J].西安电子科技大学学报(自然科学版),2001,28(12):7972801.[7] Feng Tianjin,Li Xin,Ji Guangrong,et al.A new laser2scanningsensing technique for underwater engineering inspection[J].Artificial Intelligence in Engineering,1996,10:3632368.A New Underwater La ser Imaging MethodZHEN G Bing1,SUN Xiao2He1,SU Jing2(1.School of Information Science and Engineering,Ocean University of China,Qingdao266071,China;2.China Offshore Oil Research Center,Beijing100027,China)Abstract: A turbid water observation system using the laser synchronization scanning method is urgently needed to solve the problem of underwater vision in the coastal water.This article first researches underwater laser transmission characteristics,then presents the design of the optical structure of synchronization scanning in combination with the distribution characteristics of scattered laser.An appropriate imaging system is designedby analysing all kinds of signals obtained.The system can be widely used in ocean engineering as it has effec2 tively eliminated the influence of backscattering,and is of wide visional angel and full depth of field in turbid water.Key words: underwater laser imaging;coaxial synchronous scanning;high speed electromotor line scanning责任编辑 陈呈超221中 国 海 洋 大 学 学 报2006年。