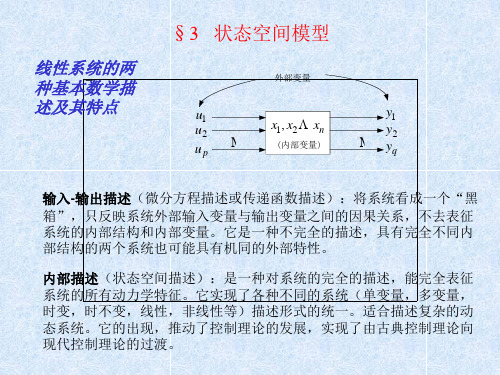
第一章 控制系统的状态空间模型
现代控制理论课件2

38
二、从系统的机理出发建立状态空间表达式
例1、求图示机械系统的状态空间表达式
外力 u(t)
K ---弹性系数 m
牛顿力学定律 my u by ky
阻 尼 系 数
y(t) b
位移 令
b u(t ) ky m y y
x1 y
x2 y
39
动态方程如下
x1 x2
x1 y 1 0 x2
41
例:设有如图所示的机 械系统。它由两个彼 此耦合的平台构成。 并借助于弹簧和阻尼 到达地基。试选择合 适的状态变量,写出 该系统的状态空间模 型。
42
解答:依题意,进行受力分析,可得如下的微分方程:
M1y1 = u -k1 (y1 - y 2 )-f1 (y1 - y 2 ) M2y 2 = k1 (y1 - y 2 ) + f1 (y1 - y 2 )-k 2y 2 -f 2y 2
其中: a11 a12 a1n a a22 a2 n 21 A — 系统内部状态的联系, an1 an 2 ann
18
称为系统矩阵 , 为n n方阵;
多输入——多输出定常系统: 用向量矩阵表示时的状态空间表达式为:
Ax Bu x y Cx Du
其状态变量为: x1 , x2 ,, xn , 则状态方程的一般形式 为:
1 a11x1 a12 x2 a1n xn b11u1 b12u2 b1r ur x 2 a21x1 a22 x2 a2 n xn b21u1 b22u2 b2 r ur x n an1 x1 an 2 x2 ann xn bn1u1 bn 2u2 bnr ur x
线性系统理论 第一章
证明:(t, s) A(t) A(t)
t
A(e)de
s
t
A(t)( s A(e)de )
A(t)(t, s)
证毕。
对于时候 t1 和 t2 ,若 A(t) 满足条件 A(t1) A(t2 ) A(t2 ) A(t1)
时,状态转移矩阵可写(
)d
t A( )d 1 ( t A( )d )2 1 ( t A( )d )3
s
2! s
3! s
12
定理1.3:设 K 为某个正常数,如果对所有的 t 有 A(t) K , 则对所有的 t 和 s 有
(t, s) expK t s
证明:设 s 固定且 t>s,因为 (s, s) 且
(t, s) A(t)(t, s)
将上式从 s 到 t 积分,得
t
(t, s) s A( )( , s)d
(t, )B( )ud
时t0 由初始状态 x(t0
)
(1-7) 引起的效应,称为
零输入响应;第二项是当系统初态 x(t0 ) 0 时由输入 u 引起
的效应,称为零状态响应。
由(1-5)、(1-7)可知要求得系统的运动轨迹,关键是求出 系统的状态转移矩阵。对于一般的时变系统,这是一件困难 的事情,大多只能依靠数值解法。
若 A,B,C,D 为常数,则称系统为定常系统,记为(A,B,C,D)
6
x1
x
x2
xn
y1
y
y2
ym
x X 状态空间
u U 输入空间
y Y 输出空间
t T 时间集
u1
u
u2
ur
7
D
u
x
第1章线性系统的状态空间描述

x&(t) Ax(t) Bu(t) y(t) Cx(t) Du(t)
• 情况1:输入u不含导数
y(n) an1y(n1) L a1y& a0 y bu
自主技术与智能控制研究中心
二、状态空间模型的建立
输入u不含导数 y(n) an1y(n1) L a1y& a0 y bu
选取状态变量 x1 y x2 y x3 y
I ml2 ml
自主技术与智能控制研究中心
ml M m
二、状态空间模型的建立
用一阶微分方程组表示系统模型!
&x& 1m2l2 g 1(I ml2 )u && 1(M m)mgl 1mlu
引入新的变量
x1 x x2 x&
x3 x4 &
x&1 x2
x&2 x&3
{1m2l x4
x&% Ax% Bu%
y%
Cx%
Du%
f1
A
f x
|x0
,u0
x1
M
fn x1
L O L
f1 xn
M
fn xn
B
f u
|x0 ,u0
,C
g x
|x0
,u0
,
D
g u
|x0 ,u0
自主技术与智能控制研究中心
二、状态空间模型的建立 例3:质量-弹簧-阻力器系统
自主技术与智能控制研究中心
u
线性化 0 V mg
m
d2 dt 2
(x
l
sin )
H
I&& Vl Hl
m d 2 (l cos) V mg
状态空间模型

状态空间模型状态空间模型是一种用于描述动态系统行为的数学模型。
在状态空间模型中,系统的行为由状态方程和观测方程确定。
状态方程描述系统状态如何随时间演变,而观测方程则描述系统状态如何被观测。
通过利用状态空间模型,我们可以对系统进行建模、预测和控制。
状态空间模型的基本概念状态空间模型通常由以下几个要素构成:1.状态变量(State Variables):描述系统状态的变量,通常用向量表示。
状态变量是系统内部的表示,不可直接观测。
2.观测变量(Observation Variables):直接观测到的系统状态的变量,通常用向量表示。
3.状态方程(State Equation):描述状态变量如何随时间演变的数学方程。
通常表示为状态向量的一阶微分方程。
4.观测方程(Observation Equation):描述观测变量与状态变量之间的关系的数学方程。
状态空间模型的应用状态空间模型在许多领域都有着广泛的应用,包括控制系统、信号处理、经济学和生态学等。
其中,最常见的应用之一是在控制系统中使用状态空间模型进行系统建模和控制设计。
在控制系统中,状态空间模型可以用于描述系统的动态行为,并设计控制器来实现系统性能的优化。
通过对状态方程和观测方程进行数学分析,可以确定系统的稳定性、可控性和可观测性,并设计出满足特定要求的控制器。
状态空间模型的特点状态空间模型具有以下几个特点:1.灵活性:可以灵活地描述各种复杂系统的动态行为,适用于各种不同的应用领域。
2.结构化:将系统分解为状态方程和观测方程的结构使得系统的分析更加清晰和系统化。
3.预测性:通过状态空间模型,可以进行系统状态的预测和仿真,帮助决策者做出正确的决策。
4.优化性:可以通过状态空间模型设计出有效的控制器,优化系统的性能指标。
在实际应用中,状态空间模型可以通过参数估计和参数辨识等方法进行模型的训练和调整,以适应实际系统的特性。
结语状态空间模型是一种强大的数学工具,可以帮助我们理解和分析动态系统的行为。
状态空间模型及其在控制工程中的应用

状态空间模型及其在控制工程中的应用状态空间模型,也称为状态变量模型,是控制工程中一种常用的数学模型方法。
它以系统的状态变量为描述对象,通过状态方程和输出方程来描述系统的动态行为。
本文将介绍状态空间模型的基本概念,以及它在控制工程中的应用。
一、状态空间模型的基本概念状态空间模型是一种以状态变量为基础的数学模型,用于描述系统的动态行为。
状态变量是系统在某一时刻的内部状态,而状态方程则描述了状态变量随时间的演化规律。
更具体地说,状态空间模型可以表示为以下形式:˙x(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)为n维的状态向量,表示系统在时刻t的内部状态;u(t)为m维的输入向量,表示系统在时刻t的外部输入;y(t)为p维的输出向量,表示系统在时刻t的输出;A为n×n维的系统矩阵,描述了状态变量的演化规律;B为n×m维的输入矩阵,描述了输入对状态的影响;C为p×n维的输出矩阵,描述了状态对输出的影响;D为p×m维的直接传递矩阵,描述了输入对输出的直接影响。
二、状态空间模型在控制工程中的应用1. 控制器设计:状态空间模型可以方便地用于控制器的设计与分析。
通过对系统的状态变量建模,可以设计出满足特定性能指标的控制器。
例如,可以利用状态反馈控制的方法,通过选择合适的反馈增益矩阵K,使得系统的状态能够稳定地收敛到期望的状态。
此外,还可以利用最优控制理论,基于状态空间模型设计出最优控制器,使得系统的控制性能最优化。
2. 系统仿真与分析:状态空间模型可以用于系统的仿真和分析。
通过将系统的参数代入状态方程和输出方程,可以得到系统的时域响应和频域特性,从而可以对系统的稳定性、响应速度以及抗干扰能力等进行分析。
此外,通过对状态空间模型做变换,还可以将系统的连续时间模型转化为离散时间模型,从而方便地进行数字控制系统的设计与分析。
3. 状态估计:状态空间模型还可以用于系统状态的估计与观测。
第一章 状态空间表达式(2013)
Y (s) bm s m bm1 s m1 b1 s b0 W ( s) n U ( s) s a n 1 s n 1 a1 s a 0
cm sm cm1sm1 c1s c0 W (s) ( s p1 )( s p2 ) ( s pn )
K1 T 1s 1
K2 T 2s 1
K3 T 3s 1
y
K4
3 状态空间表达式的建立 3.1 从系统方块图出发 变换成模拟结构图; 每个积分器的输出选作一个状态变量; 写出系统的状态方程和输出方程。
u +
K1 T 1s 1
+
K2 T 2s 1
K3 T 3s
y
K4
K1 T1 +
开环和闭环、反馈
控制的性能指标:稳定性、快速、精度。最优控制
控制理论概述
学控制理论做什么? 系统分析—分析系统的性能
系统设计—设计控制器
所谓系统分析就是在规定的条件下,对数学模型已 知系统的性能进行分析; 所谓系统设计,就是构造一个能够完成给定任务的系统, 这个系统具有希望的瞬态、稳态性能以及抗干扰性能。
f (s) f (t )e dt
0
f (s) sf (s) f (0)
传递函数:线性动态系统零初值条件下输出量的Laplace变 换像函数与输入量的Laplace变换像函数之比。 *线性系统:满足叠加和一致性, 如用线性方程或线性微分方程描述的系统 可以用于分解复杂系统 *定常系统:参数不随时间变化
J u i
x1 i
B
x2
R x1 L x K 2 a J
Kb 1 L x1 L u B x2 0 J
《现代控制理论》课后习题答案
=
3 2
, c2
=
2s + 5 lim s→−3 s + 1
=
1 2
。
从输入通道直接到输出通道上的放大系数 d = 1,由此可得:
⎡ x1
⎢ ⎣
x 2
⎤ ⎥ ⎦
=
⎡− 1
⎢ ⎣
0
0⎤ − 3⎥⎦
⎡ ⎢ ⎣
x1 x2
⎤ ⎥ ⎦
+
⎡1⎤ ⎢⎣1⎥⎦u
y
=
⎡ ⎢⎣
3 2
1 2
⎤ ⎥⎦
⎡ ⎢ ⎣
x1 x2
u
d
d
b2
dt
dt
d
b1
m
dt
b0
因此,两个环节调换后的系统状态变量图为
u
d
d
b2
dt
dt
d
b1
dt
b0
m
−∫
−∫
y −∫
a0
a1
a2
进一步简化,可得系统状态变量图为 u
b0
b1
b2
− ∫ x1
− ∫ x2
− ∫ x3 y
a0
a1
a2
3
取 y = x3 , y = x2 , y = x1 ,可以得到两个环节调换后的系统的状态空间模型为
a(s)
1 a(s)
=
s3
+
1 a2s2 +
a1s
+
a0
, b(s)
=
b2 s 2
+ b1s
+ b0
。
2
由于 s−3 y 相当于对 y 作 3 次积分,故 y = 1 可用如下的状态变量图表示: m a(s)
第一章系统的状态空间表达式
L + uc(t) _
输出
+ y _
i(t)
_
例2求图示RLC回路的状态空间表达式
di Ri uc u dt du C c i dt L du c 1 i dt C di 1 R 1 uc i u dt L L L
令
x1 uc
x2 i
状态空间表达式为
1 0 1 0 x x 1 C 1 u x 2 1 R x2 L L L x1 y 1 0 x2
x1 y [0 1] x2
例 系统如图
图示由弹簧、质量体、阻尼器组成的机械动力学系统的物理模型。 试建立以外力u(t)为系统输入、质量体位移y(t)为输出的状态空 间模型。
解:设在外力u(t)作用于小车前,小车已处于平衡态。这 里仅考虑外力加入后对小车运动的影响。系统的受力情况如 下图所示。
由牛顿第二定律有:
d2y dy m 2 u f ky dt dt
选择状态变量:对机械动力学系统,常常将位移、速度等选作 状态变量。对本例,有
x1 t yt
状态变量代入,得:
(t ) x2 (t ) y
1 x2 x k f 1 x x x u 2 1 2 m m m
状态空间表达式状态变量图
D
u
B
×
x
∫
x
C ×
y
A
状态空间表达式
(t ) Ax x (t ) Bu (t ) y(t ) Cx (t ) Du (t )
状态变量图的绘制步骤
现代控制理论章节习题含答案(大学期末复习资料)
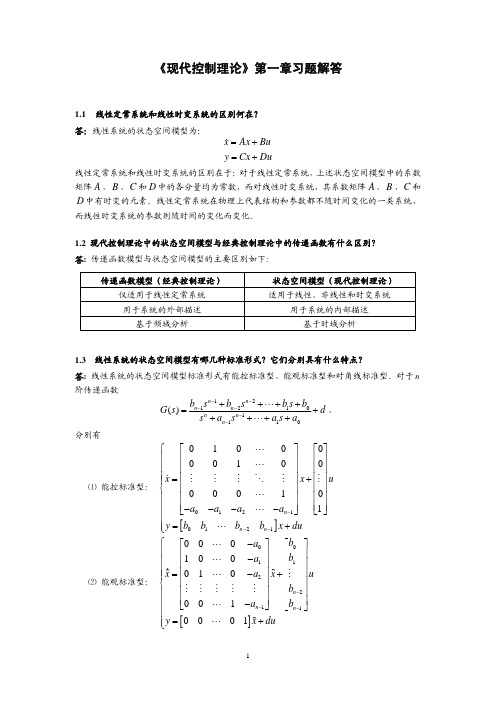
《现代控制理论》第一章习题解答1.1线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:x = AxBu+y CxDu= +线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A,B,C和中的各分量均为常数,而对线性时变系统,其系数矩阵D A,B,C和D中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于n 阶传递函数G s( )= b s n−s1nn+−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0+d ,分别有⎧⎡0 1 0 0 ⎤⎡⎤0⎪⎢0 0 1 0 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎪x =⎢ ⎥x+⎢⎥ u ⑴能控标准型:⎨⎢0 0 0 1 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎣⎢−a0 −a1 −a2 −a n−1⎥⎦⎢⎥⎣⎦1⎪⎪⎩y=[b0 b1 b n−2 b n−1]x du+⎧⎡0 0 0 −a0 ⎤⎡b0 ⎤⎪⎪⎢⎢1 0 0 −a1 ⎥⎥⎢⎢b1 ⎥⎥⎪⎪x =⎢0 1 0 −a2 ⎥⎥x+⎢⎢ ⎥⎥u⑵能观标准型:⎨⎢b n−2⎥⎪⎢ ⎥⎢⎪⎣⎢0 0 1 −a n−1⎦⎥⎢⎣b n−1⎥⎦⎪⎪⎩y=[0 0 0 1]x du+⎧⎡p1⎪⎢0⎪x =⎢⎢ 0 p20 0 ⎤⎡1⎤0 ⎥⎢1⎥⎥x+⎢⎥u ⎥⎢ ⎥⎪⑶对角线标准型:⎨⎪⎢⎣0⎪p n⎥⎦⎢⎣1⎥⎦⎪⎩y=[c1 c2 c x du n] + 式中的pp1, 2,, p n和c c1, 2,, c n可由下式给出,G s( )= b s n−s1nn−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0 + =d s p−c1 1 + s p−c2 2 + + s p−c n n +d+能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1 外,其余全为0。
State-Space-Model-状态空间模型 共119页
为的完整描述,称为系统的状态空间表达式。
x Ax Bu
y
Cx
Du
状态空间表达式的结构图为:
26
现代控制理论基础讲义 龚道雄
一、状态空间模型
D
u
x
B+
∫
x
+ +
y
C
重点:
+
A
定常线性系统!
x Ax Bu
10
现代控制理论基础讲义 龚道雄
一、状态空间模型
11
现代控制理论基础讲义 龚道雄
一、状态空间模型
回顾:线性方程组的矩阵表示:
a11x1 a12 x2 a21x1 a22 x2 am1x1 am2 x2
a1n xn b1 a2n xn b2 ,
9
现代控制理论基础讲义 龚道雄
一、状态空间模型
用一阶微分方程组表示系统模型!
x1m2l2g1(Iml2)u 1(Mm)mgl1mlu
引入新的变量
小车状态:y, y
x1 x x2 x x3 x4
摆的状态: ,
x1 x2 x2 {1m2l2g}x3 {1(I ml2)}u x3 x4 x4 {1(M m)mgl}x3 {1ml}u
因此,本章内容为现代控制理论的基础知识。
一、状态空间模型
小车-倒立摆例子
V
u
H
7
现代控制理论基础讲义 龚道雄
一、状态空间模型
小车-倒立摆例子 V
小 车 的 水 平 运 动 : Md dt22 xuH
State-Space-Model-状态空间模型
B
m n×m m r×m
C
D
现代控制理论基础讲义 龚道雄
一、状态空间模型
状态空间表达式与传递函数 表示的比较
信号表示的不同
传递函数为频域信号
状态空间模型为时域信号 反映系统的信息不同 传递函数只描述输入输出信息 状态空间模型还描述系统内部 状态信息
Ax b
12 现代控制理论基础讲义 龚道雄
一、状态空间模型
质量—弹簧—阻尼模型
13
现代控制理论基础讲义 龚道雄
一、状态空间模型
质量—弹簧—阻尼模型 0
0
14
现代控制理论基础讲义 龚道雄
一、状态空间模型
小车-倒立摆
x1 x2 x2 { 1m 2l 2 g}x3 { 1 ( I ml 2 )}u x3 x4 x4 { 1 ( M m)mgl}x3 { 1ml}u
2 2 U L ( s ) L C2 s U ( s ) ( R C s 1)( LC s R C s 1) R C s 1 1 1 2 2 2 1 2 2 2 U ( s ) R L C s L 1 2 U 2 ( s ) ( R1C1s 1)( LC2 s R2C2 s 1) R1C2 s
d 2 摆绕重心的转动: I 2 Vl sin Hl cos dt
8 现代控制理论基础讲义 龚道雄
一、状态空间模型
d 2x M 2 uH dt d2 m 2 ( x l sin ) H dt d2 m 2 (l cos ) V mg dt d 2 I 2 Vl sin Hl cos dt
x Ax Bu y Cx Du
第一章系统的状态空间表达式
y x1
状态空间表达式的建立
1、由物理公式直接建立状态空间表达式 例 系统如图所示
选择状态变量: x1=iL,x2=uc
duc diL 1 iL (u L ) C dt R1 dt
du c di L L uc C R2 u dt dt
整理得:
uc R1 diL u iL R1R2 ( ) dt L L R1 R2 L R1 R2
x1 x 2 x2 x3 x 3 6x1 3x2 2x3 u y x1 x 3
其状态图为
u
- 2
∫
x3
∫
x2
∫
x1
y
3
6
根据方块图求状态空间表达式
思路: (1) 将方块图细化到显示出积分,积分之后为状态变量,积分之前为 状态变量的一次微分。 (2)按细化后的方块图逻辑关系,直接写出状态空间表达式。
离散系统状态空间表达式
x(k 1) G(k ) x(k ) H (k )u (k ) y (k ) C (k ) x(k ) D(k )u (k )
x(k 1) Gx(k ) Hu(k ) y(k ) Cx(k ) Du(k )
建立状态方程的步骤
①选择状态变量
x1 y [0 1] x2
例 系统如图
图示由弹簧、质量体、阻尼器组成的机械动力学系统的物理模型。 试建立以外力u(t)为系统输入、质量体位移y(t)为输出的状态空 间模型。
解:设在外力u(t)作用于小车前,小车已处于平衡态。这 里仅考虑外力加入后对小车运动的影响。系统的受力情况如 下图所示。
基本概念
状态方程:系统状态方程描述的结构图如下图所示
第一章-状态空间表达式

现代控制理论Model Control Theory前言1.胚胎萌芽期(1945年以前)•十八世纪以后,蒸汽机的使用提出了调速稳定等问题1765年俄国人波尔祖诺夫发明了锅炉水位调节器1784年英国人瓦特发明了调速器,蒸汽机离心式调速器1877年产生了劳斯稳定判据•十九世纪前半叶,动力使用了发电机、电动机促进了水利、水电站的遥控和程控的发展以及电压、电流的自动调节技术的发展•十九世纪末,二十世纪初,使用内燃机促进了飞机、汽车、船舶、机器制造业和石油工业的发展,产生了伺服控制和过程控制•二十世纪初第二次世界大战,军事工业发展很快飞机、雷达、火炮上的伺服机构,总结了自动调节技术及反馈放大器技术,搭起了经典控制理论的架子,但还没有形成学科。
2.经典控制理论时期(1940-1960)1945年美国贝尔实验室的Bode和Nyqusit提出频率响应法,奠定了控制理论的基础。
美国MIT的N. Wiener在研究随机过程的预测问题中,提出Wiener滤波理论.50年代趋于成熟.主要内容对单输入单输出系统进行分析,采用时域、频率法(频域)、根轨迹法(复数域)、相平面法、描述函数法;讨论系统稳定性的代数和几何判据以及校正网络等。
面临的挑战:被控对象日益复杂化、控制性能要求不断提高。
wiener3.现代控制理论时期(50年代末-60年代初)空间技术的发展提出了许多复杂控制问题,用于导弹、人造卫星和宇宙飞船上。
取得的成就1:1957年发射人造地球卫星;2:工业机器人产品;3:1961年载人航天;4:1969年登月;4.大系统和智能控制时期(70年代)各学科相互渗透,要分析的系统越来越大,越来越复杂。
例如:人工智能、模拟人的人脑功能、机器人等。
应用举例本课程内容•状态空间模型;•基于状态空间模型的系统分析(Analysis):运动分析、能控性、能观性、稳定性•基于状态空间模型的系统综合(Synthesis):极点配置、控制器设计、观测器设计、最优控制器设计。
控制工程基础第三版课后习题答案

控制工程基础第三版课后习题答案控制工程基础第三版课后习题答案控制工程是一门涉及到系统控制与优化的学科,它是现代工程技术的重要组成部分。
掌握控制工程的基础知识对于工程师来说至关重要。
而《控制工程基础》这本教材则是控制工程学习的重要参考书之一。
本文将为读者提供《控制工程基础第三版》课后习题的答案,希望能够帮助读者更好地理解和掌握这门学科。
第一章:控制系统基础知识1. 什么是控制系统?控制系统是由一系列相互关联的元件和设备组成的,用于实现对某个过程或系统的控制和调节的系统。
2. 什么是开环控制系统?开环控制系统是指输出信号不受输入信号的影响,只根据事先设定的控制规律进行控制的系统。
3. 什么是闭环控制系统?闭环控制系统是指输出信号受到输入信号的反馈影响,根据反馈信号对输出信号进行调节的系统。
4. 什么是传递函数?传递函数是指输出变量与输入变量之间的关系,通常用一个分子多项式除以一个分母多项式的形式来表示。
5. 什么是稳定性?稳定性是指系统在受到干扰或参数变化的情况下,能够保持稳定状态的能力。
第二章:线性系统的数学模型1. 什么是线性系统?线性系统是指系统的输入和输出之间存在线性关系的系统。
2. 什么是状态空间模型?状态空间模型是用状态变量来描述系统动态行为的数学模型。
3. 什么是传递函数模型?传递函数模型是用传递函数来描述系统输入和输出之间关系的数学模型。
4. 如何从状态空间模型转换为传递函数模型?可以通过拉普拉斯变换将状态空间模型转换为传递函数模型。
5. 如何从传递函数模型转换为状态空间模型?可以通过分解传递函数为部分分式的形式,然后利用反变换将其转换为状态空间模型。
第三章:控制系统的时域分析1. 什么是单位阶跃响应?单位阶跃响应是指系统在输入信号为单位阶跃函数时的响应。
2. 什么是阻尼比?阻尼比是指系统的阻尼系数与临界阻尼系数之间的比值。
3. 什么是超调量?超调量是指系统响应的峰值与稳态值之间的差值。
现代控制理论试题(详细答案)-现控题目

现代控制理论试题B 卷及答案一、1 系统[]210,01021x x u y x ⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦能控的状态变量个数是,能观测的状态变量个数是cvcvx 。
2试从高阶微分方程385y y y u ++=求得系统的状态方程和输出方程(4分/个)解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。
状态变量个数是2。
…..(4分)2.选取状态变量1x y =,2x y =,3x y =,可得 …..….…….(1分)12233131835x x x x x x x u y x ===--+= …..….…….(1分)写成010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦…..….…….(1分)[]100y x = …..….…….(1分)二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。
(3分)2已知系统[]210 020,011003x x y x ⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?(5分)解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。
若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
…..….…….(3分) 2.[][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分) [][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=940320110 2CA CA C U O ………………..……….(1分) rank 2O U n =<,所以该系统不完全能观……..….…….(2分)三、已知系统1、2的传递函数分别为2122211(),()3232s s g s g s s s s s -+==++-+求两系统串联后系统的最小实现。
状态空间模型
y (t ) = [b0 bn a0 , b1 bn a1, L, bn 1 bn an 1 ]X (t ) + bnu (t )
Example
分别求传递函数
和 2)
4 s 2 + 3s 3 G(s) = 2 s + 7s + 5
s 3 G(s) = 2 1) s + 3s + 2
Example
设一线性系统的状态表示为
dx1 dt = x1 + x2 + u dx 2 = x2 u dt y = x1 x2 + 2u
{A, B, C , D}
试求其输入-输出微分方程.
解:
1 2 1 , , [1 1],2, = 0 1 1
1
代入公式(3)得
的状态模型表示。 解:1) m=1,n=2且 a0 = 2, a1 = 3, b0 = 3, b1 = 1.
0 A= a0 1 0 1 0 B = , = , a1 2 3 1 C = [b0 b1 ] = [ 3 1], D = 0
状态模型为:
1 x1 (t ) 0 d x1 (t ) 0 = + u (t ) dt x2 (t ) 2 3 x2 (t ) 1 x1 (t ) y (t ) = [ 3 1] x2 (t )
其中 H i 为待定向量,维数与 X 相同. 显然,由初始条件X (0) = X 0 可得 H 0 = X 0 , 并将(3)式代入(2)式得:
H1 + 2 H 2t + L + nH nt n 1 + L = AH 0 + AH1t + L + AH nt n + L
状态空间模型
所以 D 4
a0 5,a1 1,b0 23,b1 3.
所以
0 A a0
1 a1
0 5
11,
B 10,
C b0 b1 23 3,
状态模型为:
d dt
x1(t ) x2 (t )
0 5
1 1
x1(t ) x2 (t )
10u(t
)
y(t) 23
3
x1(t ) x2 (t )
dt 3. e At1 e At2 e A(t1t2 );
4. eAt 1 eAt ;
5. AB BA e At eBt e( AB)t ;
6. M 1e At M eM 1AMt;
1
7.
A
e1t
e At
;
n
ent
状态方程的解
对方程
d dt
X
(t)
AX
(t)
BU
C
c21
c22
c2n
cq1
cq 2
cqn
(输出矩阵)
d11 d12 d1p
D
d21
d22
d
2
p
dq1
dq2
dqp
(输出-输入矩阵)
状态模型的矩阵表示为:
d dt
X
(t)
AX
(t)
BU
(t),
X
(0)
X
0
Y (t) CX (t) DU (t).
显然,该系统完全由矩阵 A, B,C, D 所确定。以后我们以{ A, B,C, D }形 式来简记该系统。
得状态方 程:
dx1 dt
y'
x2
dx2